Область техники, к которой относится изобретение
Предлагаемое изобретение относится к транспортным средствам и, более конкретно, к механизму обратной связи рулевого колеса.
Уровень техники
[0001] Сообщество автомобильных инженеров (SAE) определило множество уровней автономной эксплуатации транспортного средства. На уровнях 0-2 водитель-человек наблюдает или управляет большинством задач вождения, зачастую без помощи от транспортного средства. На уровне 0 ("без автоматизации"), водитель-человек отвечает за все операции транспортного средства. На уровне 1 ("помощь водителю"), транспортное средство иногда помогает в рулении, ускорении или торможении, но водитель все еще отвечает за подавляющее большинство управления транспортным средством. На уровне 2 ("частичная автоматизация") транспортное средство может управлять рулением, ускорением и торможением в некоторых обстоятельствах без взаимодействия с человеком. На уровнях 3-5 транспортное средство принимает на себя большую часть связанных с вождением задач. На уровне 3 ("традиционная автоматизация") транспортное средство может выполнять руление, ускорение и торможение в некоторых обстоятельствах, а также наблюдение за окружением для вождения. Уровень 3, однако, требует от водителя вмешиваться время от времени. На уровне 4 ("высокая автоматизация"), транспортное средство может выполнять те же задачи, что и на уровне 3, но не полагаясь на вмешательство водителя в некоторых режимах вождения. На уровне 5 ("полная автоматизация"), транспортное средство может выполнять почти все задачи без какого-либо вмешательства водителя.
Раскрытие изобретения
Одним аспектом изобретения является компьютер, запрограммированный, чтобы изменять угол поворота управляемых колес транспортного средства, и поворачивать рулевое колесо на угол поворота рулевого колеса на основе угла поворота управляемых колес для предварительно заданного будущего времени и определенного отношения угла поворота рулевого колеса к углу поворота управляемых колес, причем определенное отношение изменяется на основе, по меньшей мере, скорости транспортного средства.
При этом, определенное отношение выше при первой скорости транспортного средства, чем при второй скорости транспортного средства, первая скорость транспортного средства быстрее второй скорости транспортного средства.
При этом, определенное отношение увеличивается, когда скорость транспортного средства увеличивается.
При этом, определенное отношение увеличивается монотонно, когда скорость транспортного средства увеличивается.
При этом, определенное отношение основывается на типе проезжей части.
При этом, тип проезжей части является одним из автомагистрали с управляемым доступом и дороги с неуправляемым доступом.
При этом, определенное отношение выше для автомагистрали с управляемым доступом, чем для дороги с неуправляемым доступом.
Другим аспектом изобретения является способ, содержащий этапы, на которых изменяют угол поворота управляемых колес транспортного средства, и поворачивают рулевое колесо на угол поворота рулевого колеса на основе угла поворота управляемых колес для предварительно заданного будущего времени и определенного отношения угла поворота рулевого колеса к углу поворота управляемых колес, причем определенное отношение изменяется на основе, по меньшей мере, скорости транспортного средства.
При этом, определенное отношение выше при первой скорости транспортного средства, чем при второй скорости транспортного средства, первая скорость транспортного средства быстрее второй скорости транспортного средства.
При этом, определенное отношение увеличивается, когда скорость транспортного средства увеличивается.
При этом, определенное отношение увеличивается монотонно, когда скорость транспортного средства увеличивается.
При этом, определенное отношение основывается на типе проезжей части.
При этом, тип проезжей части является одним из автомагистрали с управляемым доступом и дороги с неуправляемым доступом.
При этом, определенное отношение выше для автомагистрали с управляемым доступом, чем для дороги с неуправляемым доступом.
Другим аспектом изобретения является рулевая система, содержащая рулевое колесо, имеющее угол поворота рулевого колеса, систему "руления по проводам", соединенную с рулевым колесом, и компьютер на связи с системой "руления по проводам" и запрограммированный, чтобы изменять угол поворота управляемых колес и поворачивать рулевое колесо на основе угла поворота управляемых колес для предварительно заданного будущего времени и определенного отношения угла поворота рулевого колеса к углу поворота управляемых колес, определенное отношение основано на скорости транспортного средства.
При этом, рулевая система также содержит рулевую рейку, которая имеет возможность соединения с ходовыми колесами, имеющими угол поворота управляемых колес.
При этом, рой определенное отношение увеличивается, когда скорость транспортного средства увеличивается.
При этом, определенное отношение увеличивается монотонно, когда скорость транспортного средства увеличивается.
При этом, определенное отношение основывается на типе проезжей части.
При этом, определенное отношение выше для типа проезжей части автомагистрали с управляемым доступом, чем для типа проезжей части дороги с неуправляемым доступом.
Краткое описание чертежей
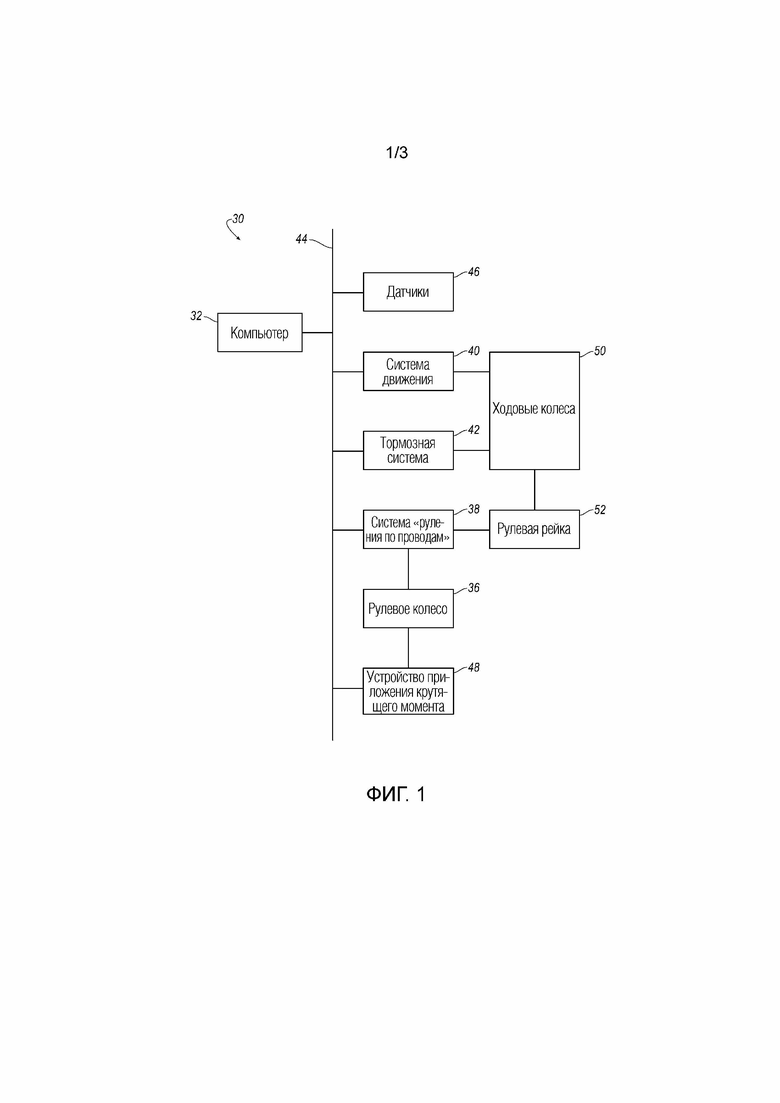
[0002] Фиг. 1 - это блок-схема примерного транспортного средства.
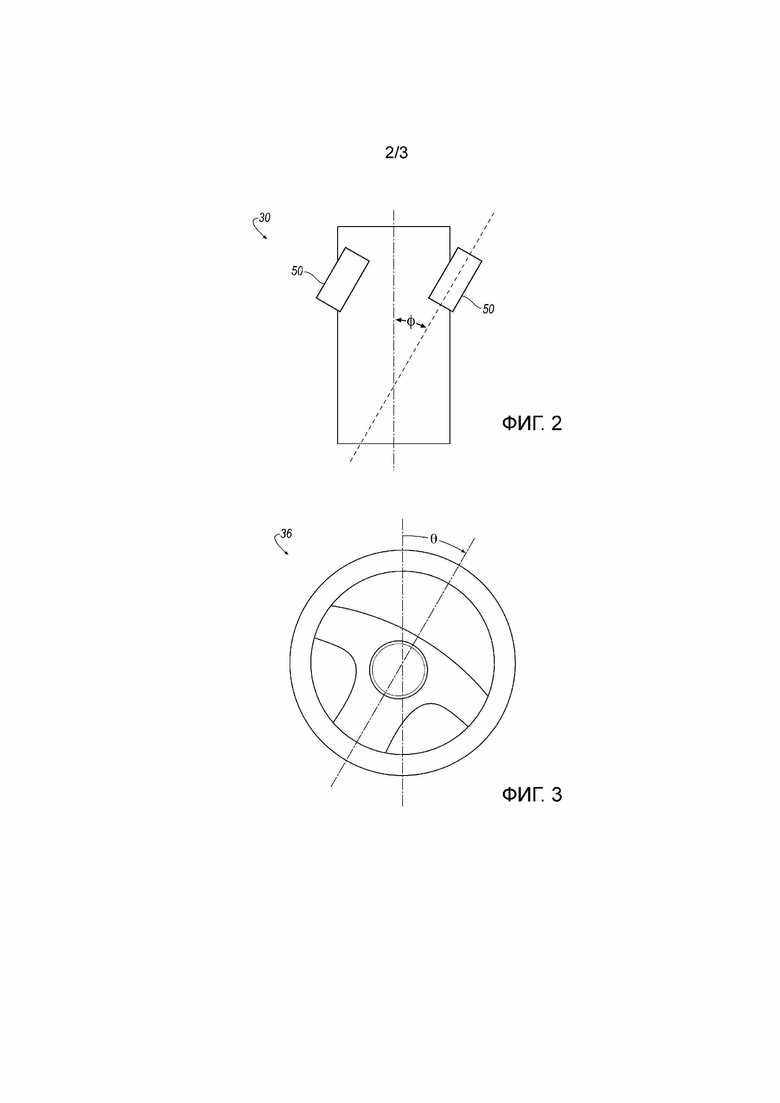
[0003] Фиг. 2 - это вид сверху транспортного средства на фиг. 1.
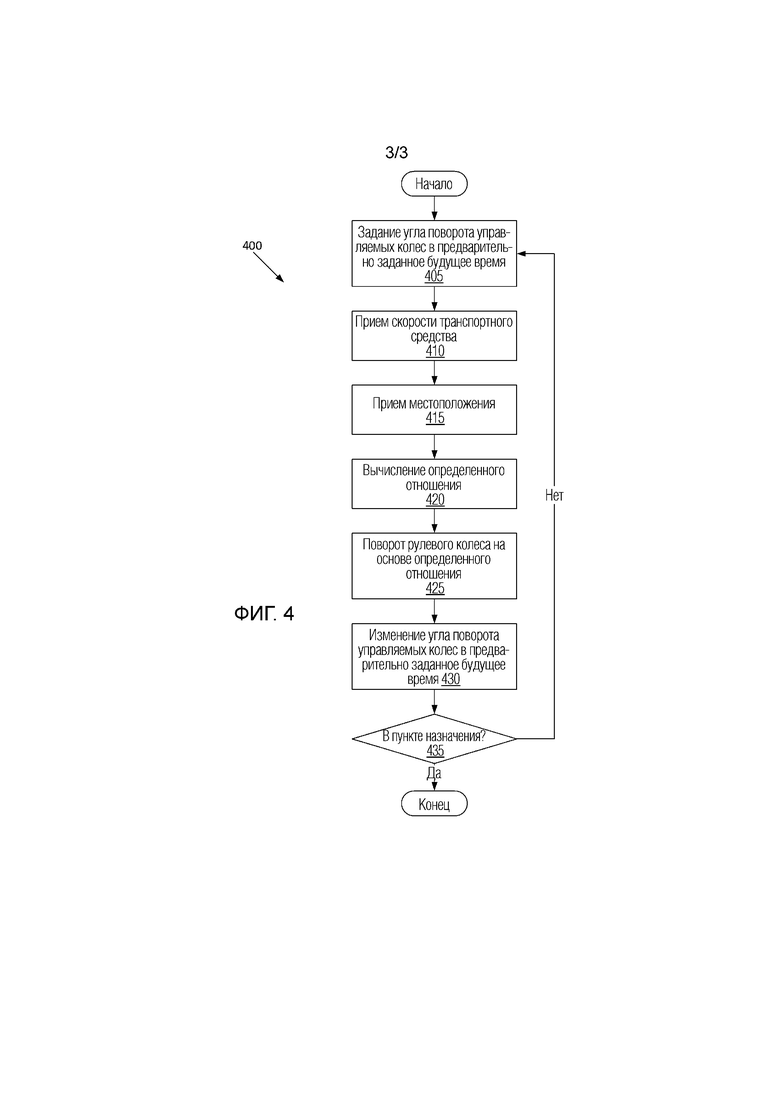
[0004] Фиг. 3 - это вид спереди рулевого колеса транспортного средства на фиг. 1.
[0005] Фиг. 4 - это блок-схема последовательности операций процесса примерного процесса для управления рулевым колесом транспортного средства на фиг. 1.
Подробное описание изобретения
[0006] Со ссылкой на чертежи, на которых аналогичные номера указывают аналогичные части повсюду на нескольких видах, компьютер 32 в транспортном средстве 30 программируется, чтобы изменять угол ϕ поворота управляемых колес транспортного средства 30 и поворачивать рулевое колесо 36 транспортного средства 30 на угол θ поворота рулевого колеса на основе спрогнозированного или предварительно заданного угла ϕ поворота управляемых колес в предварительно заданное будущее время и определенного отношения R угла θ поворота рулевого колеса к спрогнозированному или предварительно заданному углу ϕ поворота управляемых колес. Определенное отношение R изменяется на основе, по меньшей мере, текущей скорости транспортного средства.
[0007] Компьютер 32, когда запрограммирован, использует рулевое колесо 36, чтобы обеспечивать легко понятную и интуитивную обратную связь водителю-человеку. Водитель-человек может чувствовать себя более комфортно, когда способен интуитивно предвидеть действия, которые транспортное средство 30 будет вскоре выполнять. Если транспортное средство 30 эксплуатируется полуавтономным образом (как определено ниже), компьютер 32 может предоставлять водителю-человеку время реагирования, чтобы изменять действие, которое транспортное средство 30 собирается выполнять, что может уменьшать вероятность столкновения транспортного средства.
[0008] Транспортное средство 30 может быть автономным транспортным средством. Компьютер 32 может быть способен управлять транспортным средством 30 независимо от вмешательства водителя-человека, полностью или в большей или меньшей степени. Компьютер 32 может быть запрограммирован, чтобы управлять системой 40 движения, тормозной системой 42, рулевой системой 34 и/или другими системами транспортного средства.
[0009] В целях этого описания автономный режим определяется как режим, в котором каждая из системы 40 движения, тормозной системы 42 и рулевой системы 34 транспортного средства 30 управляются компьютером 32; в полуавтономном режиме компьютер 32 транспортного средства 30 управляет одной или двумя из системы 40 движения, тормозной системы 42 и рулевой системы 34. В качестве контекста, SAE определяет множество уровней автономной эксплуатации транспортного средства, как описано в разделе "Уровень техники". Таким образом, в одном примере, неавтономные режимы эксплуатации согласно настоящему изобретению могут включать в себя уровни 0-1, полуавтономные режимы эксплуатации могут включать в себя уровни 2-3, а полностью автономные режимы эксплуатации могут включать в себя уровни 4-5.
[0010] Со ссылкой на фиг. 1, компьютер 32 включен в транспортное средство 30 для выполнения различных операций, включающих в себя операции, которые описаны в данном документе. Компьютер 32 является вычислительным устройством, которое, как правило, включает в себя процессор и память, память включает в себя одну или более форм компьютерно-читаемых носителей и хранит инструкции, исполняемые процессором для выполнения различных операций, включающих в себя те, которые описаны в данном документе. Память компьютера 32 дополнительно, как правило, хранит отдаленные данные, принимаемые через различные механизмы связи; например, компьютер 32, как правило, конфигурируется для связи по сети 44 связи в транспортном средстве 30. Компьютер 32 может также иметь соединение с бортовым диагностическим разъемом (OBD-II). Хотя один компьютер 32 показан на фиг. 1 для простоты иллюстрации, должно быть понятно, что компьютер 32 может включать в себя, и различные операции, описанные в данном документе, могут выполняться посредством одного или более вычислительных устройств.
[0011] Компьютер 32 может передавать сигналы через сеть 44 связи, которая может быть шиной локальной сети контроллеров (CAN), Ethernet, локальной соединительной сетью (LIN), Bluetooth, и/или посредством любой другой проводной или беспроводной сети связи. Компьютер 32 может быть на связи с датчиками 46, системой 40 движения, тормозной системой 42 и компонентами рулевой системы 34, такими как система 38 "руления по проводам" и устройство 48 приложения крутящего момента.
[0012] С продолжающейся ссылкой на фиг. 1, система 40 движения транспортного средства 30 генерирует энергию и преобразует энергию в движение транспортного средства 30. Система 40 движения может быть известной подсистемой движения транспортного средства, например, традиционной силовой цепью, включающей себя двигатель внутреннего сгорания, соединенный с трансмиссией, которая передает вращательное движение ходовым колесам 50; электрической силовой цепью, включающей в себя аккумуляторы, электромотор и трансмиссию, которая передает вращательное движение ходовым колесам 50; гибридной силовой цепью, включающей в себя элементы традиционной силовой цепи и электрической силовой цепи; или любым другим типом системы движения. Система 40 движения может включать в себя электронный блок управления (ECU) или т.п., который находится на связи с и принимает входные данные от компьютера 32 и/или водителя-человека. Водитель-человек может управлять системой 40 движения, например, через педаль акселератора и/или рычаг переключения передач.
[0013] Тормозная система 42 является типично известной тормозной подсистемой транспортного средства и препятствует движению транспортного средства 30, чтобы, тем самым, замедлять и/или останавливать транспортное средство 30, например, препятствуя вращению ходовых колес 50. Тормозная система 42 может быть фрикционными тормозами, такими как дисковые тормоза, барабанные тормоза, ленточные тормоза и т.д.; рекуперативными тормозами; любым другим подходящим типом тормозов; или сочетанием. Тормозная система 42 может включать в себя электронный блок управления (ECU) или т.п., который находится на связи с и принимает входные данные от компьютера 32 и/или водителя-человека. Водитель-человек может управлять тормозной системой 42, например, через педаль тормоза.
[0014] С продолжающейся ссылкой на фиг. 1, рулевая система 34 является типично известной подсистемой рулевого управления транспортного средства и управляет поворотом ходовых колес 50. Рулевая система может быть системой реечной передачи с рулевым управлением с электроусилителем, системой "руления по проводам", которые известны в области техники, или любой другой подходящей системой. Рулевая система 34 может включать в себя электронный блок управления (ECU) или т.п., который находится на связи с и принимает вводы от компьютера 32 и/или водителя-человека. Рулевая система 34 может включать в себя рулевое колесо 36, посредством которого водитель-человек может управлять рулевой системой 34. Что касается рулевой системы 34, использующей руление по проводам, рулевая система 34 может включать в себя рулевую рейку 52, соединенную с ходовыми колесами 50, систему 38 "руления по проводам", рулевое колесо 36 и устройство 48 приложения крутящего момента.
[0015] Рулевая рейка 52 соединяется с системой 38 "руления по проводам", и рулевая рейка 52 соединяется с ходовыми колесами 50. Рулевая рейка 52 может быть соединена с системой 38 "руления по проводам", например, через электромеханические актуаторы (не показаны), которые преобразуют электрический сигнал в механическое движение рулевой рейки 52. Позиция рулевой рейки 52 определяет поворот ходовых колес 50. Как показано на фиг. 2, ходовые колеса 50 имеют угол ϕ поворота управляемых колес, т.е., угол, на который ходовые колеса 50 поворачиваются относительно остальной части транспортного средства 30. Угол ϕ поворота управляемых колес может быть измерен относительно переднего направления транспортного средства. Например, когда ходовые колеса 50 повернуты прямо вперед, угол ϕ поворота управляемых колес равен нулю; когда ходовые колеса 50 поворачиваются вправо, угол ϕ поворота управляемых колес имеет положительное значение; а когда ходовые колеса 50 поворачиваются влево, угол ϕ поворота управляемых колес имеет отрицательное значение.
[0016] Система 38 "руления по проводам" может быть соединена с рулевой рейкой 52, как описано, и соединена с рулевым колесом 36. Система 38 "руления по проводам" может включать в себя жгут проводки и ECU (не показан) на связи с рулевой рейкой 52 и рулевым колесом 36. Другими словами, не существует механического соединения между рулевым колесом 36 и рулевой рейкой 52, только электрическое или электронное соединение.
[0017] Рулевое колесо 36 может быть соединено с возможностью вращения с приборной панелью (не показано) и быть обращено к сиденью для водителя-человека. Как показано на фиг. 3, рулевое колесо 36 имеет угол θ поворота рулевого колеса. Угол θ поворота рулевого колеса может быть измерен относительно опорного угла, такого как когда рулевое колесо 36 выровнено по центру. Например, когда рулевое колесо 36 выровнено по центру, угол θ поворота рулевого колеса равен нулю; когда рулевое колесо 36 поворачивается вправо, угол θ поворота рулевого колеса имеет положительное значение; а когда рулевое колесо 36 поворачивается влево, угол θ поворота рулевого колеса имеет отрицательное значение. Система 38 "руления по проводам" может обнаруживать угол θ поворота рулевого колеса через датчик положения (не показан), например, датчик на эффекте Холла, кодовый датчик угла поворота и т.д.
[0018] Устройство 48 приложения крутящего момента находится на связи с компьютером 32 и соединено с рулевым колесом 36, например, через рулевую колонку (не показана). Устройство 48 приложения крутящего момента может прикладывать крутящий момент T к рулевому колесу 36, вызывая или препятствуя вращению рулевого колеса 36. Крутящий момент T, прикладываемый посредством устройства 48 приложения крутящего момента, является переменным, и компьютер 32 может инструктировать устройству 48 приложения крутящего момента прикладывать конкретный уровень крутящего момента T к рулевому колесу 36. Устройство 48 приложения крутящего момента может быть, например, электромотором.
[0019] С продолжающейся ссылкой на фиг. 1, транспортное средство 30 может включать в себя датчики 46. Датчики 46 могут обнаруживать внутренние состояния транспортного средства 30, например, скорость колеса, ориентацию колеса и переменные параметры двигателя и трансмиссии. Датчики 46 могут обнаруживать позицию или ориентацию транспортного средства 30, например, датчики системы глобального позиционирования (GPS); акселерометры, такие как пьезоэлектрические или микроэлектромеханические системы (MEMS); гироскопы, такие как скоростные, лазерные или волоконно-оптические гироскопы; инерциальные измерительные блоки (IMU); и магнетометры. Датчики 46 могут воспринимать внешний мир; например, датчики 46 могут включать в себя один или более радиолокационных датчиков, сканирующих лазерных дальномеров, устройств лазерной системы обнаружения и измерения дальности (ЛИДАР) и датчиков обработки изображений, таких как камеры. Датчики 46 могут включать в себя устройства связи, например, устройства связи между транспортным средством и инфраструктурой (V2I) или между транспортными средствами (V2V).
[0020] Фиг. 4 - это блок-схема последовательности операций процесса, иллюстрирующая примерный процесс 400 для управления рулевым колесом 36 транспортного средства 30. Компьютер 32 может быть запрограммирован с помощью этапов процесса 400. Процесс 400 может быть использован, чтобы обеспечивать обратную связь водителю-человеку. Компьютер 32 может использовать процесс 400, когда транспортное средство 30 эксплуатируется полностью автономно, или когда транспортное средство 30 эксплуатируется полуавтономным образом.
[0021] Процесс 400 начинается на этапе 405, на котором компьютер 32 задает угол ϕ поворота управляемых колес для предварительно заданного будущего времени. Например, компьютер 32 может предоставлять угол ϕ поворота управляемых колес для указанного будущего времени в качестве выходных данных программирования, традиционно используемого для автономной или полуавтономной эксплуатации транспортного средства 30. Предварительно заданное будущее время может быть предварительно определенным временем Δt от настоящего времени t0, т.е., t0+Δt, например, две секунды в будущем. Предварительно заданное будущее время может быть выбрано достаточно коротким, так что вращение рулевого колеса 36, описанное ниже относительно этапа 425, интуитивно ассоциируется с изменением в угле ϕ поворота управляемых колес транспортного средства 30, которое будет выполнено водителем-человеком. Дополнительно или альтернативно, предварительно заданное будущее время может быть выбрано разработчиком системы достаточно длительным, так что водитель-человек может иметь время, чтобы реагировать на поворот рулевого колеса 36 до изменения в угле ϕ поворота управляемых колес транспортного средства 30.
[0022] Далее, на этапе 410, компьютер 32 принимает скорость транспортного средства, например, от одного или более датчиков 46 или от одометра.
[0023] Далее, на этапе 415, компьютер 32 идентифицирует тип проезжей части, по которой транспортное средство 30 движется. Компьютер 32 может использовать данные о местоположении, такие как GPS-данные от датчиков 46, объединенные с картографическими данными, чтобы идентифицировать дорогу, на которой транспортное средство 30 в данный момент находится. Компьютер 32 может использовать картографические данные, чтобы классифицировать дорогу. Возможные типы проезжей части включают в себя автомагистраль с управляемым доступом, например, автомагистраль между штатами, бесплатную дорогу, платную дорогу и т.д.; и дорогу с неуправляемым доступом, например, автомагистрали, находящиеся в ведении округа, местные дороги и т.д. Автомагистраль с управляемым доступом в целях этого описания означает автомагистраль, которая предназначается для непрерывного (безостановочного в отсутствие дорожной пробки) транспортного потока и, следовательно, не имеет светофоров или знаков остановки. Например, доступ на автомагистраль с управляемым доступом может быть осуществлен только посредством въездов и съездов, которые предоставляют возможность транспортным средствам вливаться на автомагистраль и/или съезжать без остановки или существенного замедления до съезда. Дорога с неуправляемым доступом, напротив, предназначается для движения транспорта, чтобы останавливаться и начинать движение, и доступ к ней может осуществляться транспортными средствами, поворачивающими на и с дороги, вероятно из остановленного положения. Дорога с неуправляемым доступом может иметь светофоры и/или знаки остановки.
[0024] Далее, на этапе 420, компьютер 32 вычисляет определенное отношение R. Определенное отношение R используется ниже на этапе 425 в качестве отношения угла θ поворота рулевого колеса к углу ϕ поворота управляемых колес в предварительно заданное будущее время, например, R=θ(t0)/ϕ(t0+Δt). Определенное отношение R изменяется на основе, по меньшей мере, скорости транспортного средства и может также изменяться на основе типа проезжей части, т.е., R(v,h), в котором v является текущей скоростью транспортного средства, а h является текущим типом проезжей части. Например, определенное отношение R может быть выше при первой скорости транспортного средства, чем при второй, более низкой скорости транспортного средства. Более конкретно, определенное отношение R может увеличиваться, когда скорость транспортного средства увеличивается, и может увеличиваться монотонно, т.е., без уменьшения, когда скорость транспортного средства увеличивается. Определенное отношение R может быть выше для автомагистрали с управляемым доступом, чем для дороги с неуправляемым доступом. Более конкретно, определенное отношение R может быть выше при заданной скорости для автомагистрали с управляемым доступом, чем для дороги с неуправляемым доступом.
[0025] Далее, на этапе 425, компьютер 32 поворачивает рулевое колесо 36 на угол θ поворота рулевого колеса на основе угла ϕ поворота управляемых колес в предварительно заданное будущее время и при определенном отношении R. В частности, рулевое колесо 36 поворачивается на угол θ поворота рулевого колеса, равный углу ϕ поворота управляемых колес в предварительно заданное будущее время, умноженному на определенное отношение R, θ(t0)=R(v,h)*ϕ(t0+Δt).
[0026] Далее, на этапе 430, компьютер 32 изменяет угол ϕ поворота управляемых колес транспортного средства 30, поворачивая ходовые колеса 50 в предварительно заданное будущее время t0+Δt.
[0027] Далее, на этапе 435 решения, компьютер 32 определяет, достигло ли транспортное средство 30 своего пункта назначения или было переведено из полностью автономного режима или полуавтономного режима в неавтономный режим, другими словами, компьютер 32 определяет, возникла ли ситуация, которая означает, что компьютер 32 не должен больше выполнять процесс 400. Если транспортное средство 30 не достигло своего пункта назначения и т.д., тогда процесс 400 переходит обратно к этапу 405, чтобы начинаться снова; т.е., процесс 400 продолжается непрерывно, пока транспортное средство 30 эксплуатируется автономно или полуавтономно. Если транспортное средство 30 достигло своего пункта назначения и т.д., процесс 400 заканчивается.
[0028] В целом, описанные вычислительные системы и/или устройства могут применять любую из множества компьютерных операционных систем, включающих в себя, но не считающихся ограниченными, версии и/или разновидности операционной системы Ford Sync®, микропрограммного обеспечения AppLink/Smart Device Link, операционной системы Microsoft Automotive®, операционной системы Microsoft Windows®, операционной системы Unix (например, операционной системы Solaris®, распространяемой корпорацией Oracle Corporation из Редвуд Шорс, Калифорния), операционной системы AIX UNIX, распространяемой компанией International Business Machines из Армонка, Нью-Йорк, операционной системы Linux, операционных систем Mac OS X и iOS, распространяемых компанией Apple Inc. из Купертино, Калифорния, BlackBerry OS, распространяемой компанией Blackberry Ltd из Ватерлоо, Канада, и операционной системы Android, разрабатываемой компанией Google Inc. открытым альянсом мобильных телефонов, или платформы QNX® CAR Platform for Infotainment, предлагаемой компанией QNX Software Systems. Примеры вычислительных устройств включают в себя, без ограничения, бортовой компьютер транспортного средства, компьютерную рабочую станцию, сервер, настольный компьютер, ноутбук, портативный или карманный компьютер или некоторую другую вычислительную систему и/или устройство.
[0029] Вычислительные устройства, как правило, включают в себя компьютерно-исполняемые инструкции, при этом инструкции могут исполняться одним или более вычислительными устройствами, такими как перечисленные выше. Машиноисполняемые инструкции могут быть компилированы или интерпретированы из компьютерных программ, созданных с использованием множества языков и/или технологий программирования, включающих в себя, без ограничения, отдельно или в комбинации, Java™, C, C++, Matlab, Simulink, Stateflow,Visual Basic, Java Script, Perl, HTML и т.д. Некоторые из этих вариантов применения могут быть скомпилированы и выполнены на виртуальной машине, такой как виртуальная машина Java, виртуальная машина Dalvik и т.п. В целом, процессор (например, микропроцессор) принимает инструкции, например, из памяти, компьютерно-читаемого носителя и т.д. и выполняет эти инструкции, таким образом, выполняя один или более процессов, включающих в себя один или более процессов, описанных в данном документе. Такие инструкции и другие данные могут быть сохранены и переданы с помощью множества компьютерно-читаемых носителей. Файл в вычислительном устройстве, в целом, является совокупностью данных, сохраненных на считываемом компьютером носителе, таком как носитель хранения, оперативное запоминающее устройство и т.д.
[0030] Компьютерно-читаемый носитель (также называемый процессорно-читаемым носителем) включает в себя любой нетранзиторный (например, материальный) носитель, который участвует в предоставлении данных (например, инструкций), которые могут быть считаны компьютером (например, процессором компьютера). Такой носитель может принимать многие формы, включающие в себя, но не только, энергонезависимые носители и энергозависимые носители. Энергонезависимые носители могут включать в себя, например, оптические или магнитные диски и другое постоянное запоминающее устройство. Энергозависимые носители могут включать в себя, например, динамическое оперативное запоминающее устройство (DRAM), которое типично составляет основную память. Такие инструкции могут быть переданы посредством одной или более сред передачи данных, включающих в себя коаксиальные кабели, медный провод и оптические волокна, включающие в себя провода, которые содержат системную шину, соединенную с процессором ECU. Обычные формы компьютерно-читаемых носителей включают в себя, например, гибкий диск, дискету, жесткий диск, магнитную ленту, любой другой магнитный носитель, CD-ROM, DVD, любой другой оптический носитель, перфорационную карту, бумажную ленту, любой другой физический носитель с рисунками отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему памяти или картридж, или любой другой носитель, с которого компьютер может выполнять считывание.
[0031] Базы данных, репозитории данных или другие хранилища данных, описанные в данном документе, могут включать в себя различные виды механизмов для сохранения, осуществления доступа и извлечения различных видов данных, включающих в себя иерархическую базу данных, набор файлов в файловой системе, базу данных приложений в собственном формате, систему управления реляционными базами данных (RDBMS) и т.д. Каждое такое хранилище данных, в общем, включается в вычислительное устройство с использованием компьютерной операционной системы, к примеру, одной из компьютерных операционных систем, упомянутых выше, и является доступным через сеть любым одним или более из множества способов. Файловая система может быть доступна из операционной системы компьютера и может включать в себя файлы, сохраненные в различных форматах. RDBMS, как правило, применяет язык структурированных запросов (SQL) в дополнение к языку для создания, хранения, редактирования и выполнения сохраненных процедур, такой как язык PL/SQL, упомянутый выше.
[0032] В некоторых примерах элементы системы могут быть реализованы как компьютерно-читаемые инструкции (например, программное обеспечение) на одном или более вычислительных устройствах (например, серверах, персональных компьютерах и т.д.), сохраненные на считываемых компьютером носителях, ассоциированных с ним (например, дисках, запоминающих устройствах и т.д.). Компьютерный программный продукт может содержать такие инструкции, сохраненные на считываемых компьютером носителях, для выполнения функций, описанных в данном документе.
[0033] На чертежах, идентичные ссылки с номерами указывают идентичные элементы. Дополнительно, некоторые или все из этих элементов могут быть изменены. Что касается носителей, процессов, систем, способов, эвристических правил и т.д., описанных в данном документе, должно быть понятно, что, хотя этапы таких процессов и т.д. были описаны как происходящие согласно некой упорядоченной последовательности, такие процессы могут быть применены на практике с помощью описанных этапов, выполняемых в порядке, отличном от порядка, описанного в данном документе. Дополнительно должно быть понятно, что некоторые этапы могут выполняться одновременно, что другие этапы могут быть добавлены, или что некоторые этапы, описанные в данном документе, могут быть опущены. Другими словами, описания процессов в данном документе предоставлены с целью иллюстрации некоторых вариантов осуществления и не должны никоим образом истолковываться как ограничивающие формулу изобретения.
[0034] Соответственно, должно быть понятно, что вышеприведенное описание предназначено быть иллюстративным, а не ограничивающим. Многие варианты осуществления и применения, отличные от предоставленных примеров, будут понятны специалистам в области техники по прочтении вышеприведенного описания. Рамки изобретения должны быть определены, не со ссылкой на вышеприведенное описание, но должны вместо этого быть определены со ссылкой на прилагаемую формулу изобретения, вместе с полными рамками эквивалентов, к которым такие пункты формулы приписаны. Ожидается и предполагается, что будущие разработки произойдут в технологиях, обсужденных в данном документе, и что раскрытые системы и способы будут включены в такие будущие варианты осуществления. Резюмируя, должно быть понятно, что изобретение способно к модификации и вариативности и ограничено только последующей формулой изобретения.
[0035] Все термины, используемые в формуле изобретения, предполагают получение их очевидных и обычных значений, которые понятны специалистам в области техники, пока явное указание на противоположное не будет выполнено в данном документе. В частности, использование сингулярных артиклей, таких как "a", "the", "упомянутый" и т.д., должно читаться, чтобы перечислять один или более указанных элементов, пока формула изобретения не перечислит явное ограничение до противоположного.
[0036] Изобретение было описано иллюстративным образом, и должно быть понятно, что терминология, которая была использована, предполагает быть скорее в сущности слов описания, чем ограничения. Многие модификации и вариации настоящего изобретения возможны в свете вышеописанных учений, и изобретение может быть применено на практике иначе, чем конкретно описано.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ КРУТЯЩИМ МОМЕНТОМ РУЛЕВОЙ КОЛОНКИ | 2016 |
|
RU2721860C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВЕДЕНИЕМ В ДВИЖЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2557132C1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2681984C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СПОСОБ ДЛЯ УМЕНЬШЕНИЯ ЭФФЕКТОВ ЛЮФТА ВО ВРЕМЯ РУЛЕНИЯ | 2013 |
|
RU2578518C1 |
| СИСТЕМА И СПОСОБ ДЛЯ УПРАВЛЕНИЯ РУЛЕНИЕМ И ТОРМОЖЕНИЕМ | 2018 |
|
RU2692415C1 |
| УСТРОЙСТВО ПОМОЩИ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ПОМОЩИ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2626433C1 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ В ПОЛОСЕ | 2014 |
|
RU2647823C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2749924C1 |
| УПРАВЛЯЮЩЕЕ УСТРОЙСТВО РУЛЕНИЯ | 2021 |
|
RU2754282C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ КОЛЕБАНИЯМИ И СИСТЕМА УПРАВЛЕНИЯ КОЛЕБАНИЯМИ | 2016 |
|
RU2637079C2 |
Изобретение относится к транспортным средствам, в частности к механизму обратной связи рулевого колеса. При управлении рулением транспортного средства устанавливают угол поворота управляемых колес транспортного средства в настоящее время для предварительно заданного будущего времени. До предварительно заданного будущего времени поворачивают рулевое колесо на угол поворота рулевого колеса на основе угла поворота управляемых колес для предварительно заданного будущего времени и определенного отношения угла поворота рулевого колеса к углу поворота управляемых колес. При этом определенное отношение изменяется на основе, по меньшей мере, скорости транспортного средства. Повышается безопасность при эксплуатации. 3 н. и 17 з.п. ф-лы, 4 ил.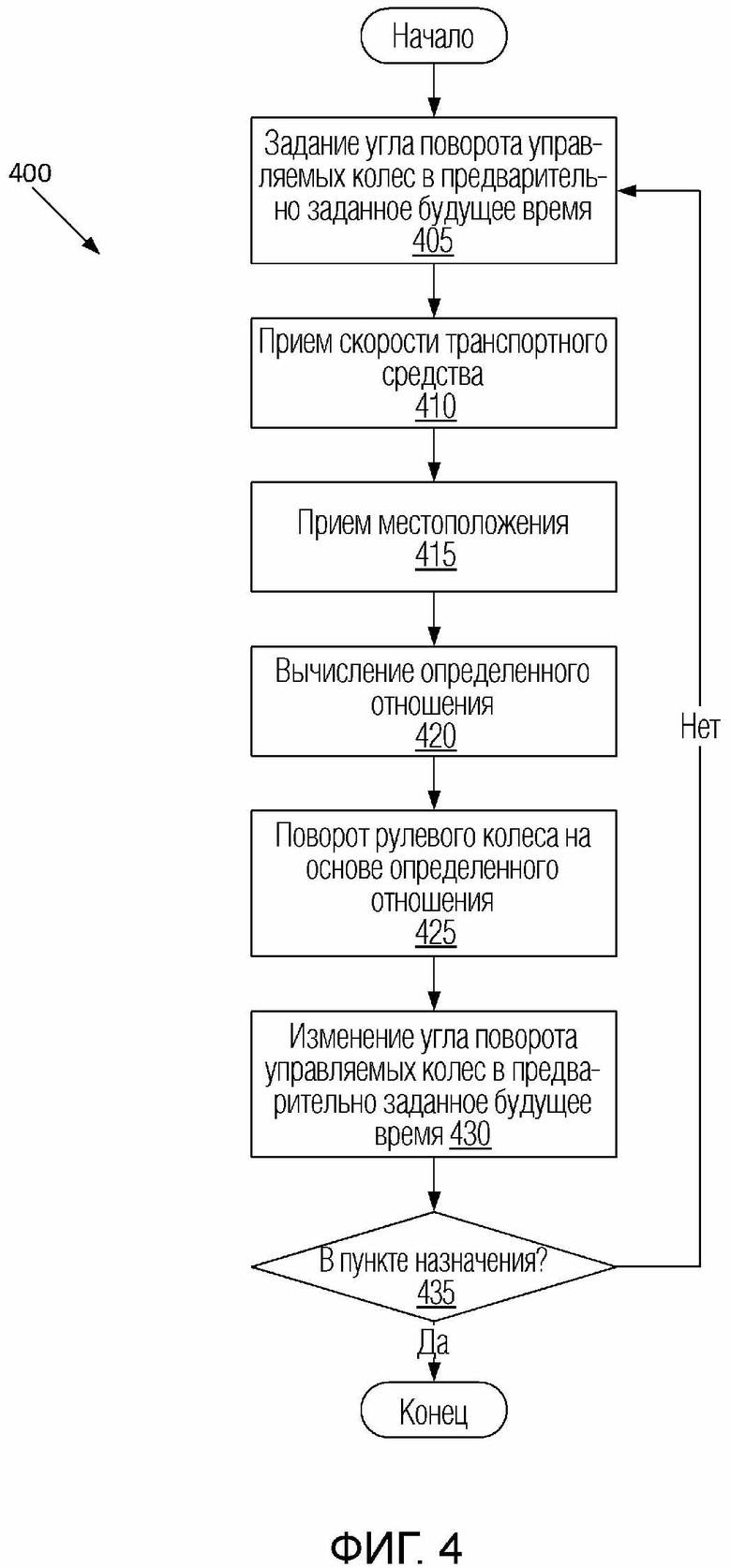
1. Компьютер, запрограммированный, чтобы
устанавливать угол поворота управляемых колес транспортного средства в настоящее время для предварительно заданного будущего времени; и
до предварительно заданного будущего времени поворачивать рулевое колесо на угол поворота рулевого колеса на основе угла поворота управляемых колес для предварительно заданного будущего времени и определенного отношения угла поворота рулевого колеса к углу поворота управляемых колес;
при этом определенное отношение изменяется на основе, по меньшей мере, скорости транспортного средства.
2. Компьютер по п. 1, в котором определенное отношение выше при первой скорости транспортного средства, чем при второй скорости транспортного средства, первая скорость транспортного средства быстрее второй скорости транспортного средства.
3. Компьютер по п. 1, в котором определенное отношение увеличивается, когда скорость транспортного средства увеличивается.
4. Компьютер по п. 3, в котором определенное отношение увеличивается монотонно, когда скорость транспортного средства увеличивается.
5. Компьютер по п. 1, в котором определенное отношение основывается на типе проезжей части.
6. Компьютер по п. 5, в котором тип проезжей части является одним из автомагистрали с управляемым доступом и дороги с неуправляемым доступом.
7. Компьютер по п. 6, в котором определенное отношение выше для автомагистрали с управляемым доступом, чем для дороги с неуправляемым доступом.
8. Способ управления рулением транспортного средства, содержащий этапы, на которых:
устанавливают угол поворота управляемых колес транспортного средства в настоящее время для предварительно заданного будущего времени; и
до предварительно заданного будущего времени поворачивают рулевое колесо на угол поворота рулевого колеса на основе угла поворота управляемых колес для предварительно заданного будущего времени и определенного отношения угла поворота рулевого колеса к углу поворота управляемых колес;
при этом определенное отношение изменяется на основе, по меньшей мере, скорости транспортного средства.
9. Способ по п. 8, в котором определенное отношение выше при первой скорости транспортного средства, чем при второй скорости транспортного средства, первая скорость транспортного средства быстрее второй скорости транспортного средства.
10. Способ по п. 8, в котором определенное отношение увеличивается, когда скорость транспортного средства увеличивается.
11. Способ по п. 10, в котором определенное отношение увеличивается монотонно, когда скорость транспортного средства увеличивается.
12. Способ по п. 8, в котором определенное отношение основывается на типе проезжей части.
13. Способ по п. 12, в котором тип проезжей части является одним из автомагистрали с управляемым доступом и дороги с неуправляемым доступом.
14. Способ по п. 13, в котором определенное отношение выше для автомагистрали с управляемым доступом, чем для дороги с неуправляемым доступом.
15. Рулевая система, содержащая:
рулевое колесо, имеющее угол поворота рулевого колеса;
систему "руления по проводам", соединенную с рулевым колесом; и
компьютер на связи с системой "руления по проводам", запрограммированный, чтобы изменять установку угла поворота в настоящее время для предварительно заданного будущего времени и до предварительно заданного будущего времени поворачивать рулевое колесо на основе угла поворота управляемых колес для предварительно заданного будущего времени и определенного отношения угла поворота рулевого колеса к углу поворота управляемых колес, причем определенное отношение основано на скорости транспортного средства.
16. Рулевая система по п. 15, содержащая также рулевую рейку, соединенную с системой "руления по проводам", рулевая рейка имеет возможность соединения с ходовыми колесами, имеющими угол поворота управляемых колес.
17. Рулевая система по п. 15, в которой определенное отношение увеличивается, когда скорость транспортного средства увеличивается.
18. Рулевая система по п. 17, в которой определенное отношение увеличивается монотонно, когда скорость транспортного средства увеличивается.
19. Рулевая система по п. 15, в которой определенное отношение основывается на типе проезжей части.
20. Рулевая система по п. 19, в которой определенное отношение выше для типа проезжей части автомагистрали с управляемым доступом, чем для типа проезжей части дороги с неуправляемым доступом.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| СПОСОБ ПОВОРОТА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2476344C1 |

