Изобретение относится к подвескам кабин транспортных средств, а именно к способам формирования силовых факторов в амортизаторных стойках системы подрессоривания кабины транспортного средства с возможностями нелинейного регулирования демпфирующих свойств подвески кабины.
Известен способ демпфирования колебаний подвижной системы и устройство для его осуществления заключающийся в том, что путем возбуждения импульсов магнитного поля создают дополнительную диссипативную силу сопротивления в области демпфирующей магнитной жидкости, которая пространственно предваряет передний фронт перемещения части подвижной системы, погруженной в магнитную жидкость в направлении перемещения. Устройство для демпфирования колебаний содержит цилиндр, заполненный магнитной жидкостью, подвижные в осевом направлении шток с поршнем, размещенные в цилиндре, соленоидную катушку из нескольких секций, охватывающую цилиндр и подключаемую к регулируемому источнику питания. Регулируемый источник питания содержит измерители положения и направления перемещения поршня, выходы которых соединены с первым и вторым информационными входами логического блока. Силовой вход логического блока соединен с источником питания, а выход соединен с управляющим входом коммутатора. Выходы коммутатора соединены с входами секций соленоидной катушки. Достигается повышение эффективности демпфирования колебаний подвижной системы (см. патент на изобретение RU № 2426922, опубл. 20.08.2011г.).
Недостатки способа заключаются в сравнительно низкой эффективности гашения колебаний.
Известен также cпоcоб демпфирования колебаний подвески транспортных средств с помощью индуцируемых постоянными магнитами вихревых токов, который заключается в использовании сил торможения, возникающих в процессе взаимного перемещения постоянных магнитов и сплошных цельных замкнутых электропроводящих элементов конструкции в результате взаимодействия магнитных полей постоянных магнитов и магнитных полей вихревых токов, индуцированных в результате движения в электропроводящих элементах без использования внешних источников питания и системы управления. Достигается расширение температурного диапазона и времени эксплуатации амортизаторов (см. патент на изобретение RU №2762760, опубл. 22.12.2021г.).
Недостатки способа заключаются в сравнительно низкой эффективности демпфирования колебаний.
За прототип, по совокупности существенных признаков, принимаем способ адаптивного управления амортизатором с магнитореологической жидкостью построенный по схеме с рекуррентным алгоритмом текущей идентификации, доставляющим оценки неизвестных параметров системы подвески и внешних возмущений на основании измеренных сигналов, с задаваемой неявной эталонной моделью в виде колебательного звена с назначаемыми параметрами: собственной частотой колебаний и относительным коэффициентом затухания, формирующими требуемые характеристики подвески транспортного средства, а также на основе условий адаптируемости, предполагающих обеспечение заданного качества функционирования системы управления в условиях текущей параметрической неопределенности при наличии лишь приблизительной исходной информации о массе транспортного средства и параметрах демпфирующего устройства. Однако для функционирования данной системы управления демпфированием на ее вход должна подаваться информация об ускорении, скорости перемещения и перемещении подрессоренной массы транспортного средства относительно неподрессоренной, что в свою очередь требует установки на борту транспортного средства большого количества датчиков и блоков управления для непрерывного считывания, обработки и накопления информации об указанных кинематических параметрах в процессе движения транспортного средства. Вследствие этого данный способ управления демпфированием обладает высоким уровнем сложности и требует большого количества дополнительного оборудования на борту транспортного средства для обеспечения его реализуемости, что является недостатком данной системы, поэтому данный способ управления амортизатором нельзя признать удовлетворительным (см. патент на изобретение RU №2782049, опубл. 11.02.2022г.).
Недостатки этого технического решения заключаются в сравнительно низких виброизолирующих свойствах амортизатора.
Была поставлена задача повышения виброизолирующих свойств амортизаторных стоек системы подрессоривания кабины, за счет формирования в них упругодемпфирующих связей между кабиной и рамой, обеспечивающих минимальную жесткость системы подрессоривания, но с возможностью при этом нелинейного регулирования уровней демпфирования для обеспечения отсутствия рисков возникновения резонансных явлений раскачивания кабины при движении автотранспортного средства.
Поставленная задача решается за счет реализации способа динамического управления гидропневматической амортизаторной стойкой системы подрессоривания кабины транспортного средства путем регулирования гидравлического сопротивления амортизаторной стойки за счет изменения проходного сечения электромагнитного дросселя, при котором:
блок управления, после запуска двигателя транспортного средства, по данным датчика деформации амортизаторной стойки, обеспечивает в пневмобаллоне величину давления воздуха, требуемого для установки амортизаторной стойки в положение статического равновесия кабины транспортного средства и формирует управляющий сигнал (генерирует команду) для закрытия впускного клапана пневмобаллона;
далее блок управления, после начала движения транспортного средства, по данным датчика деформации амортизаторной стойки, формирует управляющий сигнал для изменения проходного сечения электромагнитного дросселя, обеспечивающий минимально возможный уровень демпфирования амортизаторной стойки в положениях около статического равновесия амортизаторной стойки;
далее блок управления, в процессе движения транспортного средства, по данным датчика деформации амортизаторной стойки, непрерывно формирует управляющий сигнал для изменения проходного сечения электромагнитного дросселя, увеличивающий уровень демпфирования по мере увеличения хода штока амортизаторной стойки так, чтобы обеспечивать гарантированное отсутствие резонансных явлений раскачивания кабины транспортного средства на подвеске;
при этом переходные участки между уровнями минимального и максимального уровня демпфирования определяются из условия поддержания минимума энергии колебаний амортизаторной стойки.
Совокупность существенных признаков способа, заключающаяся в том, что «блок управления, после запуска двигателя транспортного средства, по данным датчика деформации амортизаторной стойки, обеспечивает в пневмобаллоне величину давления воздуха, требуемого для установки амортизаторной стойки в положение статического равновесия кабины транспортного средства и формирует управляющий сигнал (генерирует команду) для закрытия впускного клапана пневмобаллона;
далее блок управления, после начала движения транспортного средства, по данным датчика деформации амортизаторной стойки, формирует управляющий сигнал для изменения проходного сечения электромагнитного дросселя, обеспечивающий минимально возможный уровень демпфирования амортизаторной стойки в положениях около статического равновесия амортизаторной стойки;
далее блок управления, в процессе движения транспортного средства, по данным датчика деформации амортизаторной стойки, непрерывно формирует управляющий сигнал для изменения проходного сечения электромагнитного дросселя, увеличивающий уровень демпфирования по мере увеличения хода штока амортизаторной стойки так, чтобы обеспечивать гарантированное отсутствие резонансных явлений раскачивания кабины транспортного средства на подвеске;
при этом переходные участки между уровнями минимального и максимального уровня демпфирования определяются из условия поддержания минимума энергии колебаний амортизаторной стойки» позволяет повысить виброизолирующие свойства амортизаторных стоек системы подрессоривания кабины, за счет формирования в них упругодемпфирующих связей между кабиной и рамой, обеспечивающих минимальную жесткость системы подрессоривания, при этом с возможностью нелинейного регулирования уровней демпфирования для обеспечения отсутствия рисков возникновения резонансных явлений раскачивания кабины при движении автотранспортного средства.
Амортизаторная стойка подвески кабины транспортного средства включает в себя пневматический упругий элемент (пневмобаллон) и гидравлический демпфирующий элемент с возможностью регулирования уровня демпфирования по заданному нелинейному закону управления за счет изменения упругости с помощью электромагнитного клапана. Путем установки таких амортизаторных стоек в систему подрессоривания кабины транспортного средства обеспечивается организация регулируемых упругодиссипативных связей между кабиной и несущей системой транспортного средства.
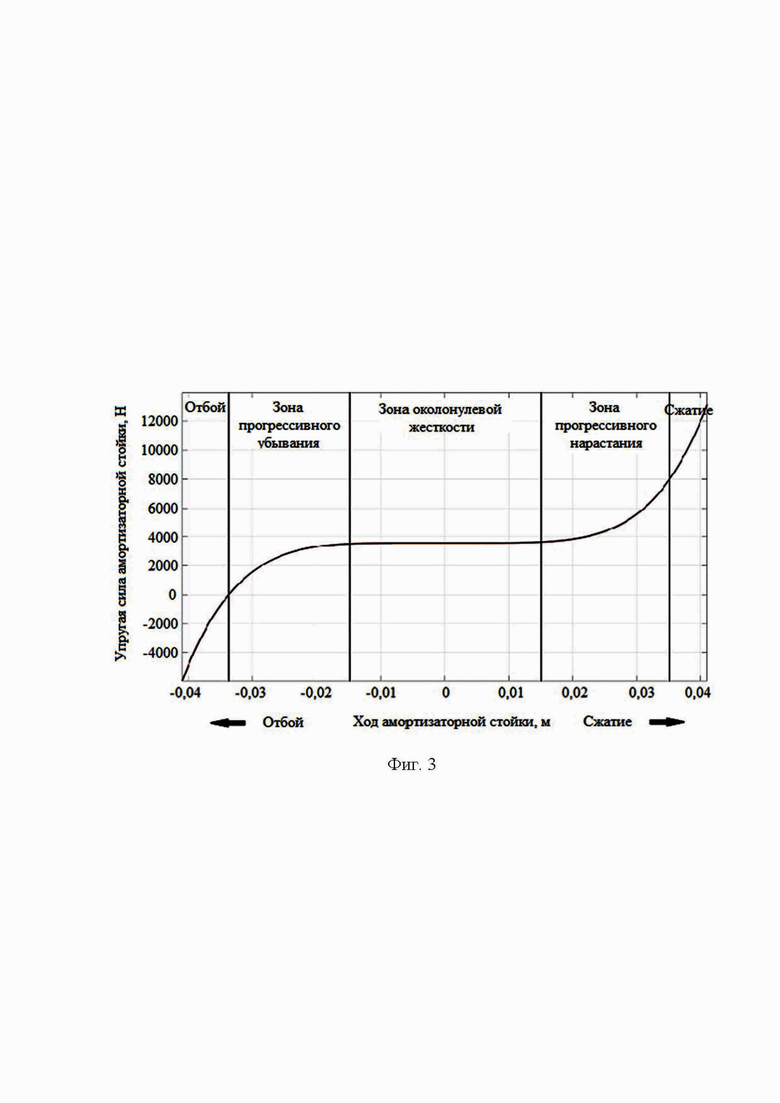
Упругий элемент (пневмобаллон) амортизаторной стойки системы подрессоривания кабины формирует нелинейную прогрессивную упругую характеристику, обеспечивающую околонулевую жесткость в области положения статического равновесия амортизаторной стойки и, соответственно, прогрессивное нарастание (снижение) упругой возвращающей силы при увеличении ходов сжатия (отбоя) для организации ограничений хода амортизаторной стойки. Синтез нелинейной прогрессивной упругой характеристики амортизаторной стойки проводится путем аппроксимации аналитически заданной степенной функции, нечетный показатель степени которой определяет уровень прогрессивности кривой упругой характеристики.
Гидравлический демпфирующий элемент амортизаторной стойки имеет возможность изменения внутренних свойств диссипации за счет нелинейного регулирования уровней демпфирования с помощью электромагнитного клапана по заданному способу управления демпфированием. Демпфирующие характеристики амортизаторной стойки обеспечивают низкий уровень демпфирования при работе в режимах около положения статического равновесия амортизаторной стойки, но в то же время обеспечивают автоматическое, при существенном увеличении амплитуд ходов амортизаторной стойки, повышение уровня демпфирования до величины, гарантированно обеспечивающей отсутствие рисков возникновения резонансных режимов её колебаний (раскачиваний), и рассчитанной, исходя из внутренних свойств системы амортизаторной стойки, по условиям взаимного расположения ее характерных кривых, скелетной кривой и амплитудно-частотной характеристики, определяющих поведение амортизаторной стойки в частотной области.
Способ управления демпфированием в амортизаторной стойке основан на регулировании уровней демпфирования по заданному нелинейному закону управления с помощью изменения напряжения, подаваемого на катушку электромагнитного клапана, в зависимости от текущей величины хода амортизаторной стойки системы подрессоривания кабины транспортного средства.
Цель повышения виброизолирующих свойств амортизаторных стоек системы подрессоривания кабины достигается следующим путем:
1. Применение в амортизаторной стойке упругого элемента с нелинейной прогрессивной нагрузочной характеристикой, обеспечивающей околонулевую минимальную жесткость в положении около положения статического равновесия амортизаторной стойки и, соответственно, прогрессивное нарастание (снижение) упругой возвращающей силы при увеличении ходов сжатия (отбоя) для организации ограничений хода амортизаторной стойки.
2. Применение в амортизаторной стойке системы подрессоривания кабины регулируемого гидравлического демпфирующего устройства, подобранные амортизационные характеристики которого обеспечивают низкий уровень демпфирования при работе в режимах около положения статического равновесия стойки, но в то же время способных автоматически, при возникновении увеличения амплитуд ходов амортизаторной стойки, нелинейно повышать уровень демпфирования до величины, гарантированно обеспечивающей отсутствие рисков возникновения резонансных режимов раскачиваний кабины и рассчитанной исходя из внутренних свойств системы амортизаторной стойки по условиям взаимного расположения ее характерных кривых, определяющих поведение стойки, в частотной области.
3. Применение регулирования уровней демпфирования в амортизаторной стойке по заданному нелинейному закону управления в зависимости от текущей величины хода амортизаторной стойки подвески кабины транспортного средства.
В результате поиска по общедоступным источникам научно-технической и патентной информации, способ управления ускорением и замедлением транспортного средства с тяговым электрическим приводом с помощью одной педали хода, совпадающий со всей совокупностью существенных признаков заявляемого решения, обнаружен не был и совокупность существенных признаков не вытекает явным образом из современного уровня техники. Следовательно, можно предположить соответствие заявляемого технического решения условиям патентоспособности «новизна» и «изобретательский уровень».
Изобретение иллюстрируется чертежами, на которых представлены:
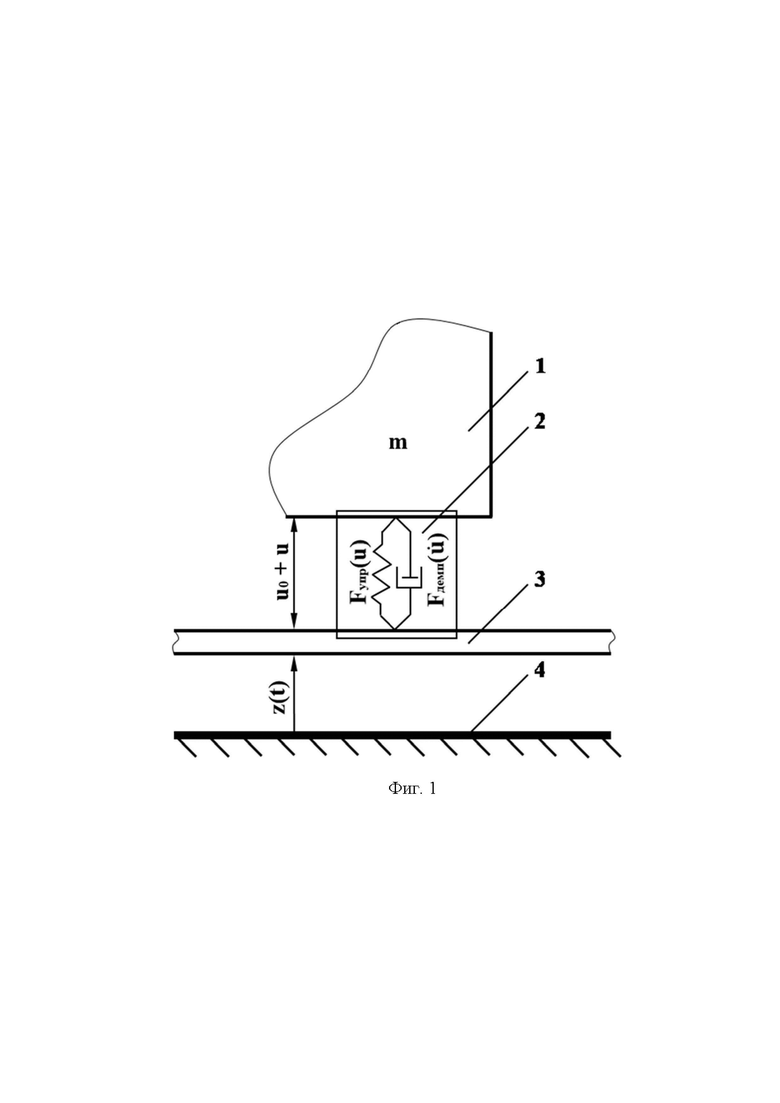
фиг. 1 Схематичная одноопорная модель системы подрессоривания кабины, приведенная к 1 амортизаторной стойке, с присоединенной массой в «четверть кабины»;
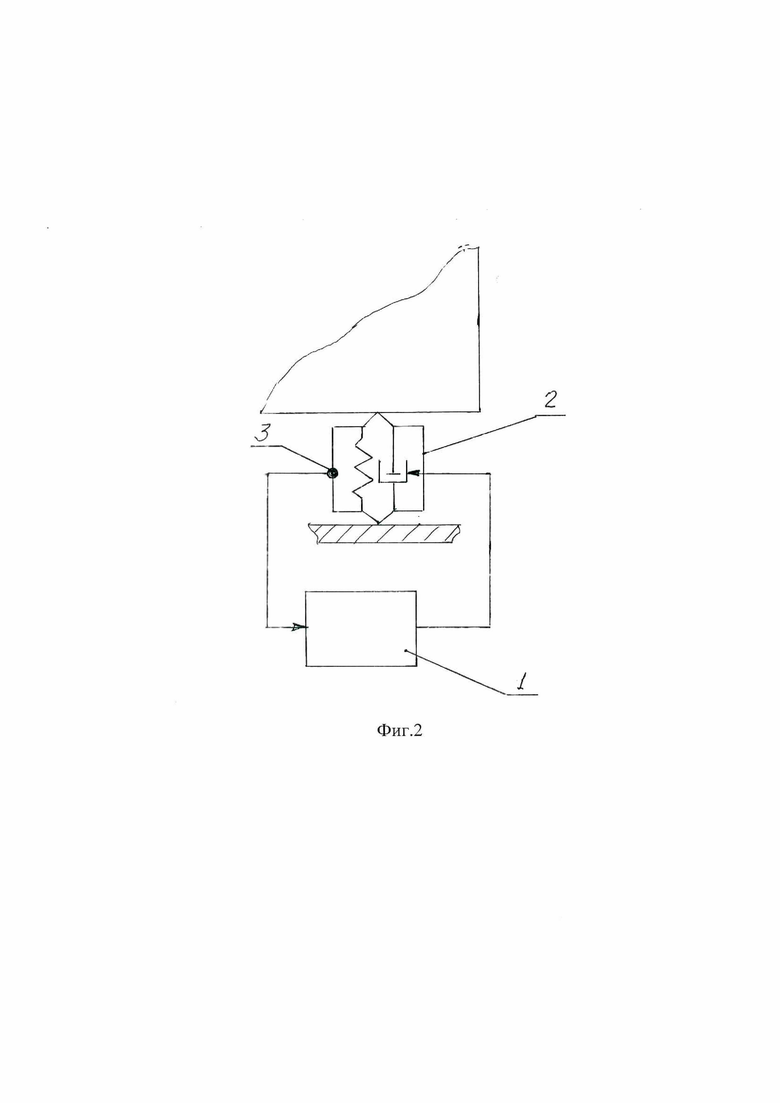
фиг. 2 Система подрессоривания кабины транспортного средства, реализующей способ динамического управления гидродинамической стойкой (схематично показана ¼ часть), схематично общий вид;
фиг. 3 График синтезированной нелинейной прогрессивной упругой характеристики амортизаторной стойки системы подрессоривания кабины транспортного средства;
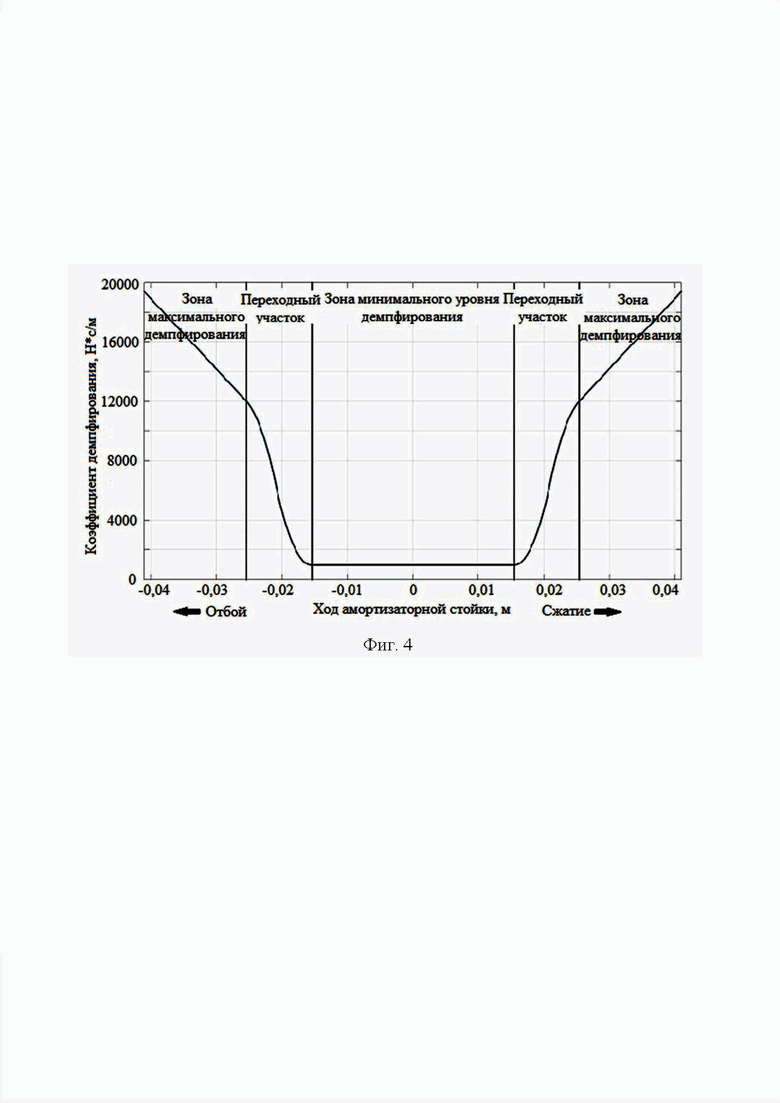
фиг. 4 Закон управления демпфированием в амортизаторной стойке системы подрессоривания кабины транспортного средства.
Система подрессоривания кабины транспортного средства содержит блок 1 управления с программным обеспечением, осуществляющий реализацию способа динамического управления, гидропневматическую амортизаторную стойку 2 кабины транспортного средства и датчик 3 деформации амортизаторной стойки.
Блок 1 управления движением реализует способ динамического управления гидропневматической амортизаторной стойкой кабины транспортного средства при помощи:
1. Синтеза нелинейной прогрессивной характеристики упругого элемента амортизаторной стойки путем аппроксимации аналитически заданной функции, показатель степени которой определяет уровень прогрессивности кривой упругой характеристики.
2. Определения требуемого максимального уровня демпфирования регулируемой амортизаторной стойки, гарантированно обеспечивающего отсутствие рисков возникновения резонансных режимов колебаний амортизаторной стойки и раскачиваний кабины автотранспортного средства на основании внутренних свойств амортизаторной стойки.
3. Применения закона нелинейного управления демпфированием в амортизаторной стойке в зависимости от текущей величины хода амортизаторной стойки подвески кабины транспортного средства.
Амортизаторная стойка подвески кабины (фиг. 1) является виброзащитной системой кабины транспортного средства с одной степенью свободы, а поведение такой системы описывается дифференциальным уравнением динамики:
где:
m – масса части кабины, приходящаяся на амортизаторную стойку;
u – деформация амортизаторной стойки относительно положения статического равновесия u0;
 – скорость деформации амортизаторной стойки;
– скорость деформации амортизаторной стойки;
 – ускорение деформации амортизаторной стойки;
– ускорение деформации амортизаторной стойки;
F – сила воздействия на кабину, создаваемая амортизаторной стойкой в направлении деформации;
Q – внешнее вибрационное воздействие на амортизаторную стойку, формируемое случайным перемещением z несущей системы транспортного средства при его движении относительно опорного основания дороги;
t – текущее время протекающего внешнего вибрационного воздействия.
Амортизаторная стойка является системой с вязким трением, то есть демпфирующая сила ее сопротивления зависит от скорости их деформации (хода). В свою очередь упругая сила пропорциональна деформации. Тогда сила F, создаваемая амортизаторной стойкой для воздействия на кабину транспортного средства, является суммой сил: упругой Fупр(u) и демпфирующей Fдемп(). При этом упругая сила в положении статического равновесия амортизаторной стойки равна статической нагрузке на стойку, т.е. Fупр(u0) = Fстат.
Упругая характеристика амортизаторной стойки транспортного средства обладает свойством  , то есть является прогрессивной.
, то есть является прогрессивной.
Схема установки амортизаторной стойки в систему подвески кабины в составе транспортного средства обеспечивает организацию упругодемпфирующей связи между кабиной и несущей системой, формирующей виброзащитное силовое воздействие на кабину.
Коэффициент демпфирования  и жесткость c(u) амортизаторной стойки определяют виброзащитные свойства амортизаторной стойки, а дифференциальное уравнение ее движения в развернутом виде имеет вид:
и жесткость c(u) амортизаторной стойки определяют виброзащитные свойства амортизаторной стойки, а дифференциальное уравнение ее движения в развернутом виде имеет вид:

Способ динамического управления гидропневматической амортизаторной стойкой кабины транспортного средства должен быть реализован следующим образом.
С целью достижения высокой степени виброизоляции кабины транспортного средства требуется обеспечить формирование силового воздействия на кабину со стороны амортизаторной стойки, параметры и характеристики которой синтезируются комплексно, т.е. ее упругая и регулируемые демпфирующие характеристики взаимосвязаны. Для достижения высоких показателей комфорта в кабине и одновременного недопущения существенных ее раскачиваний при движении транспортного средства, в подвеску кабины необходимо внедрить амортизаторные стойки с максимально прогрессивной нелинейной упругой характеристикой и с регулируемым в соответствие с нелинейным законом управления демпфированием, параметры которых должны быть рассчитаны следующим образом.
В околонулевой зоне деформации амортизаторной стойки требуется обеспечивать близкий к нулю уровень жесткости виброизоляционной системы, тем самым повышая уровень комфорта в кабине транспортного средства в совокупности со снижением нагрузок и высокочастотных вибраций, передаваемых от его несущей системы. В данной зоне требуется лишь обеспечивать поддержание необходимого уровня статической силы упругого элемента амортизаторной стойки для нахождения кабины в положениях, близких к положению статического равновесия. При этом в направлении хода сжатия амортизаторной стойки от зоны околонулевой жесткости упругая возвращающая сила должна прогрессивно нарастать, увеличивая при этом жесткость подвески кабины на ходе сжатия, а при достижении положения хода полного сжатия амортизаторной стойки возвращающая упругая сила амортизаторной стойки должна иметь величину, обеспечивающую коэффициент динамичности подвески кабины от 2 до 4. В направлении хода отбоя амортизаторной стойки от зоны околонулевой жесткости упругая возвращающая сила должна прогрессивно убывать, увеличивая при этом жесткость подвески кабины на ходе отбоя, а при достижении положений, близких к положению полного отбоя амортизаторной стойки, упругая сила амортизаторной стойки должна иметь отрицательную величину, т.е. формировать воздействие на кабину транспортного средства, препятствующее удалению кабины от несущей системы транспортного средства.
Синтез нелинейной прогрессивной упругой характеристики амортизаторной стойки (фиг. 2) необходимо проводить с помощью аппроксимации вида:
где:
А – коэффициент, отвечающий за ширину участка зоны нулевой жесткости;
u – деформация амортизаторной стойки относительно положения статического равновесия u0;
p = 3, 5, 7, … – нечетный показатель степени, отвечающий за уровень прогрессивности упругой характеристики амортизаторной стойки.
Fстат. – упругая сила амортизаторной стойки в положении статического равновесия, равная статической нагрузке на амортизаторную стойку.
Технически формирование требуемой упругой характеристики амортизаторной стойки (фиг. 2) необходимо создавать с помощью применения комплексного упругого элемента, состоящего из пневматического баллона с резинокордной оболочкой и профилем поршня сложной формы, способного обеспечивать формирование зоны околонулевой жесткости в положениях около положения статического равновесия амортизаторной стойки и зоны прогрессивного нарастания силы на ходе сжатия, а также резиновых буферов отбоя и сжатия, способных обеспечивать зоны убывания упругой силы на ходе отбоя вплоть до отрицательных значений около положения полного отбоя амортизаторной стойки, а также обеспечивать существенную возвращающую силу в положении полного сжатия амортизаторной стойки соответственно.
Закон управления демпфированием амортизаторной стойки по условию обеспечения максимального демпфирования, гарантированно обеспечивающего отсутствие возможности раскачивания кабины должен иметь вид:
Требуемое значение коэффициента k для амортизаторной стойки с нелинейной прогрессивной упругой характеристикой необходимо определять: 
где:
 – максимальный ход амортизаторной стойки;
– максимальный ход амортизаторной стойки;
 – максимальная частота внешнего возмущающего воздействия на амортизаторную стойку.
– максимальная частота внешнего возмущающего воздействия на амортизаторную стойку.
По логике представленного закона управления демпфированием, при увеличении амплитуды раскачивания u амортизаторной стойки пропорционально должен увеличиваться коэффициент демпфирования  , а при значениях амплитуд колебаний амортизаторной стойки подвески кабины, стремящихся к нулю, значение коэффициента демпфирования должно также стремиться к нулю. Но такое обеспечить невозможно, так как минимальное демпфирование в устройстве амортизаторной стойки формируется максимально возможным с конструктивной точки зрения диаметром проходного отверстия для течения амортизаторной жидкости внутри дросселирующего устройства демпфера.
, а при значениях амплитуд колебаний амортизаторной стойки подвески кабины, стремящихся к нулю, значение коэффициента демпфирования должно также стремиться к нулю. Но такое обеспечить невозможно, так как минимальное демпфирование в устройстве амортизаторной стойки формируется максимально возможным с конструктивной точки зрения диаметром проходного отверстия для течения амортизаторной жидкости внутри дросселирующего устройства демпфера.
Закон управления демпфированием в амортизаторной стойке подвески кабины транспортного средства (фиг. 3) должен синтезироваться так, чтобы в околонулевой зоне колебаний амортизаторной стойки поддерживался постоянный минимальный уровень демпфирования bmin, формируемый конструктивными возможностями демпфирующего устройства амортизаторной стойки, благодаря чему будет обеспечиваться поглощение высокочастотных колебаний от возмущающих воздействий несущей системы транспортного средства, а, следовательно, повышаться комфорт в кабине транспортного средства и снижаться нагрузки, приходящиеся на кабину. В то же время, при появлении существенных раскачиваний кабины, т.е. при высоких значениях амплитуд колебаний амортизаторной стойки u, демпфирование должно пропорционально увеличиваться по заявленному линейному закону  за счет чего не будет допускаться возможность возникновения резонансных явлений в кабине транспортного средства.
за счет чего не будет допускаться возможность возникновения резонансных явлений в кабине транспортного средства.
Оптимальное расположение переходных участков между зонами обеспечения минимального демпфирования  и пропорционального увеличения
и пропорционального увеличения  закона управления демпфированием амортизаторной стойки подвески кабины транспортного средства (фиг. 3) должно определяться из условия минимума энергии колебаний амортизаторной стойки:
закона управления демпфированием амортизаторной стойки подвески кабины транспортного средства (фиг. 3) должно определяться из условия минимума энергии колебаний амортизаторной стойки:
 ,
,
где:
Е – энергия колебаний амортизаторной стойки;
u – деформация амортизаторной стойки относительно положения статического равновесия u0;
c(u) – характеристика жесткости амортизаторной стойки в зависимости от её деформации u;
b(u) – зависимость коэффициента демпфирования амортизаторной стойки от её деформации u.
По условию нахождения экстремума (минимума) функции энергии колебаний амортизаторной стойки E через её полную производную, переходный участок закона управления демпфированием должен формироваться в соответствие с зависимостью:
где:
bпер(u) – зависимость коэффициента демпфирования амортизаторной стойки от её деформации u на переходном участке закона управления демпфированием;
const < 0 – некоторая константа, значение которой меньше нуля,
а также при условии существования экстремума (минимума) функции энергии колебаний амортизаторной стойки Е:
где:
b – коэффициент демпфирования амортизаторной стойки,
что в свою очередь определяет ограничение на значение минимального уровня демпфирования амортизаторной стойки bmin.
В соответствие со всеми вышеуказанными условиями, закон управления демпфированием в амортизаторной стойке подвески кабины должен иметь нелинейный вид, представленный на фиг. 3.
Способ динамического управления гидропневматической амортизаторной стойкой системы подрессоривания кабины транспортного средства может быть интегрирован в существующие системы управления транспортного средства и не требует их переделки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ УПРУГОДЕМПФИРУЮЩЕЙ ХАРАКТЕРИСТИКОЙ ПОДВЕСКИ СИДЕНЬЯ ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2726479C1 |
| Пневматический упругий элемент подвески транспортного средства | 1983 |
|
SU1156927A1 |
| Гидроэластомерное упругодемпфирующее устройство системы подрессоривания транспортного средства | 2021 |
|
RU2767801C1 |
| Подвеска сиденья транспортного средства с активной системой изменения жёсткости на основе магнитоактивных эластомеров | 2016 |
|
RU2708797C2 |
| САМОРЕГУЛИРУЕМЫЙ ГИДРОПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2024 |
|
RU2831315C1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ РЕССОРА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2212344C1 |
| Пневматическая подвеска | 1983 |
|
SU1104320A1 |
| КОНТЕЙНЕРОВОЗ | 2003 |
|
RU2239572C2 |
| ГИДРОПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2361134C2 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ РЕССОРА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2209735C1 |
Изобретение относится к подвескам кабин. Способ динамического управления гидропневматической амортизаторной стойкой системы подрессоривания кабины путем регулирования гидравлического сопротивления амортизаторной стойки за счет изменения проходного сечения электромагнитного дросселя. При этом блок управления, по данным датчика деформации стойки, после запуска двигателя обеспечивает в пневмобаллоне величину давления воздуха, требуемого для установки стойки в положение статического равновесия кабины, и формирует сигнал для закрытия впускного клапана пневмобаллона. После начала движения формирует сигнал для изменения проходного сечения дросселя, обеспечивающий минимально возможный уровень демпфирования стойки в положениях около статического равновесия стойки. В процессе движения непрерывно формирует сигнал для изменения проходного сечения дросселя, увеличивающий уровень демпфирования по мере увеличения хода штока стойки, так, чтобы обеспечивать отсутствие раскачивания кабины. Переходные участки между уровнями минимального и максимального демпфирования определяют из условия поддержания минимума энергии колебаний стойки. Достигается повышение виброизолирующих свойств амортизаторных стоек системы подрессоривания кабины. 4 ил.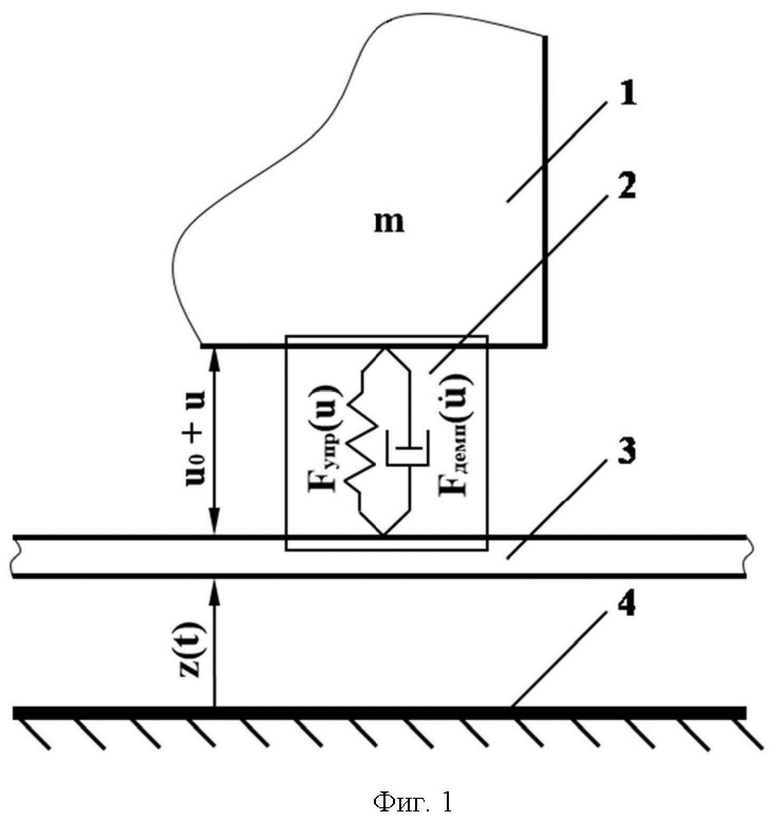
Способ динамического управления гидропневматической амортизаторной стойкой системы подрессоривания кабины транспортного средства путем регулирования гидравлического сопротивления амортизаторной стойки за счет изменения проходного сечения электромагнитного дросселя, при котором:
блок управления, после запуска двигателя транспортного средства, по данным датчика деформации амортизаторной, стойки обеспечивает в пневмобаллоне величину давления воздуха, требуемого для установки амортизаторной стойки в положение статического равновесия кабины транспортного средства, и формирует управляющий сигнал для закрытия впускного клапана пневмобаллона;
далее блок управления, после начала движения транспортного средства, по данным датчика деформации амортизаторной стойки, формирует управляющий сигнал для изменения проходного сечения электромагнитного дросселя, обеспечивающий минимально возможный уровень демпфирования амортизаторной стойки в положениях около статического равновесия амортизаторной стойки;
далее блок управления, в процессе движения транспортного средства, по данным датчика деформации амортизаторной стойки, непрерывно формирует управляющий сигнал для изменения проходного сечения электромагнитного дросселя, увеличивающий уровень демпфирования по мере увеличения хода штока амортизаторной стойки, так, чтобы обеспечивать гарантированное отсутствие резонансных явлений раскачивания кабины транспортного средства на подвеске;
при этом переходные участки между уровнями минимального и максимального уровня демпфирования определяются из условия поддержания минимума энергии колебаний амортизаторной стойки.
| RU 2782049 C1, 21.10.2022 | |||
| СПОСОБ ДЕМПФИРОВАНИЯ КОЛЕБАНИЙ ПОДВИЖНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2426922C1 |
| СИСТЕМА ПОДВЕСКИ КАБИНЫ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2415045C2 |
| US 2017182856 A1, 29.06.2017 | |||
| Устройство для исправления ошибок | 1988 |
|
SU1619408A1 |
| CN 109915518 A, 21.06.2019. | |||

