Изобретение относится к биофизике и медицинской технике и может быть использовано для управления техническими устройствами типа биоэлектрического протеза, биоэлектрического ортеза, экзоскелета, компьютера, игровой приставки или другими техническими устройствами подобного типа.
В последние годы в сферу медицины все шире внедряются различные робототехнические устройства. Это связано с развитием соответствующей элементной базы, разработкой и созданием биологически безопасных материалов, а также методов получения и цифровой обработки информации о состоянии отдельных органов человека. Наибольшее распространение получило использование биопотенциалов, в первую очередь электромиограммы. Электромиография – это метод исследования биоэлектрических потенциалов, возникающих в скелетных мышцах человека и животных при возбуждении мышечных волокон и регистрация их электрической активности. Известно, что иннервация электрическими импульсами двигательных единиц, которые образуют пучки мышечных волокон, приводит к деполяризации мембраны мышечных волокон, в результате чего двигательные единицы способны генерировать потенциал действия, который распространяясь по нервным волокнам вызывает мышечное сокращение. Причем для поддержания мышечного сокращения двигательные единицы должны быть иннервированы неоднократно, что растягивает процесс сокращения во времени. Сумма потенциалов действия от всех вовлеченных в сокращение двигательных единиц формирует сигнал электромиограммы (ЭМГ), который можно зарегистрировать, используя игольчатые или поверхностные электроды. [De Luca, Carlo (2006), Electromyography. Encyclopedia of Medical Devices and Instrumentation, Second Edition, Volume 3. John Wiley Publisher, pp. 98-109]. Последующая обработка и извлечение информативных признаков из ЭМГ позволяет сформировать управляющее воздействие и реализовать управление техническими устройствами, например, биоэлектрическими протезами. [Alter, Ralph (1966), Bioelectric Control of Prostheses, Technical Report: Massachusetts Institute of Technology, Research Laboratory of Electronics].
Создание таких устройств особенно перспективно для реабилитации после ампутаций и параличей и восстановления функций опорно-двигательного аппарата. В таких случаях остаточная биоэлектрическая активность усеченных или парализованных мышц используется для управления движениями протеза или ортопедического аппарата. Электрическая активность мышц регистрируется электродами с культи, сформированные электрические сигналы поступают содержат данные о виде совершаемого движения. Эти данные преобразуются в соответствующие управляющие сигналы исполнительных механизмов искусственной конечности. Очевидно, что для создания качественных протезов с биоэлектрическим управлением необходим качественный и стабильный сигнал от датчиков.
Известен способ электромиографического управления протезами по патенту WO №2012150500, A61F 2/60. A61F 2/68 A61F 2/70), согласно которому осуществляют формирование управляющего сигнала посредством регистрации электрофизиологического сигнала с мышцы, обработку его, передачу результатов обработки в блок управления и затем на исполнительный механизм.
Недостатком этого способа, как и других известных способов электромиографического управления протезами является то, что в следствие аддитивного характера электромиографического сигнала потенциалы действия от соседних мышц накладываются друг на друга, поэтому получить сигнал ЭМГ об активности конкретной мышцы крайне тяжело. Кроме того, влияние перекрестных (интерференционных) помех от соседних мышц возрастает с ростом расстояния между измерительными электродами. Другим принципиальным недостатком электромиографического управления протезами является то, что сигналы ЭМГ хорошо отражают лишь начало и окончание мышечного сокращения, но не дают истинного представления о характере движения мышцы в процессе ее сокращения.
Частично этот недостаток устраняется в известном «Способе бионического управления техническими устройствами», представленном патентами на изобретение RU № 2627818 и WO2017160183, А61B 5/0488, A61F 2/54. Техническая задача, решаемая этим изобретением, заключается в получении относительно качественного и стабильного сигнала, который при управлении техническим устройством позволял формировать управляющие воздействия, пропорциональные степени мышечного сокращения, с задержкой не более 120 мс. В этом случае появляется принципиальная возможность превращения в управляющий сигнал «самого движения мышцы» во времени, тогда как известные способы снятия биопотенциалов с мышцы с помощью ЭМГ-датчиков фиксируют лишь начало сокращения мышцы.
При указанном способе бионического управления техническими устройствами управляющее воздействие формируется посредством регистрации электрофизиологического сигнала с сокращающейся мышцы, обработки сигнала, передачи его в блок управления и затем на исполнительный механизм. При этом регистрацию электрофизиологического сигнала осуществляют путем пропускания через мышцу переменного электрического тока, затем определяют электрический импеданс, а в качестве управляющего воздействия в дополнение к ЭМГ-сигналу используют изменение электрического импеданса при сокращении мышцы, для регистрации которого пропускают через кожные покровы и ткани человека электрический ток с использованием токовых электродов, расположенных на поверхности кожных покровов и/или в глубине тканей. Частоту пропускаемого электрического тока выбирают предпочтительно в диапазоне от 10 кГц до 100 МГц, амплитуду тока – в диапазоне от 0,01 до 10 мА, в то время, как для получения ЭМГ-сигнала используют диапазон частот от 50 Гц до 400 Гц. При этом управляющее воздействие формируют с использованием обоих сенсорных каналов. Описанный в указанном патенте комплекс для реализации данного способа выбран в качестве прототипа предлагаемого изобретения.
Он позволяет достаточно точно управлять движением протеза руки, обеспечивая различие таких типов совершаемых действий как сгибание и разгибание, предоставляя возможность пропорционального управления устройством.
Однако недостатком вышеуказанного прототипа является зависимость сигналов биоимпеданса от сопротивления электрод-кожа. Также он не позволяет учитывать силу прижатия электродной системы и ее перекосов, которые значительно влияют на качество регистрации сигнала биоимпеданса, что приводит к ошибкам в управлении устройством. Кроме того, при расположении электродных систем в проекции мышц, не участвующих в выполняемом действии, сигнал ЭМГ не выражен, что усложняет его анализ.
Настоящее изобретение направлено на устранение указанных недостатков, т.е. на контроль зависимости сигнала биоимпеданса от величины сопротивления электрод-кожа и силы прижатия электродной системы, учет перекосов электродной системы, увеличение информативности получаемых данных, путем добавления дополнительного информационного управляющего канала сигнала механомиограммы (ММГ), а также на достижение более точного и антропоморфного управления такими техническими устройствами, как биоэлектрический протез, биоэлектрический ортез, экзоскелет, компьютер, игровая приставка и т.п.
Ожидаемым техническим результатом применения предлагаемого изобретения является повышение эффективности бионического управления такими техническими устройствами.
Для достижения этого технического результата в блок регистрации биосигналов, содержащийся в представленном комплексе бионического управления техническими устройствами, был добавлен третий информационный канал, то есть в комплексе бионического управления техническими устройствами, содержащем последовательно подключенные друг к другу блок регистрации биосиналов и блок реализации управляющих воздействий, содержащем последовательно включенные блок управления и исполнительный блок, являющийся выходом комплекса, в котором блок регистрации биосигналов включает в себя источник тока, два выхода которого подключены соответственно к двум токовым электродам, два измерительных электрода подключены ко входам входного усилителя, выход которого является входом блоков обработки каналов электромиограммы (ЭМГ) и импеданса соответственно, в блок регистрации биосигналов введен датчик механомиографического (ММГ) канала, питающийся от источника опорного напряжения, сигнал с которого подаётся на входной усилитель, выход которого подключен последовательно ко входу блока обработки ММГ, выходы блоков обработки каналов ЭМГ, импеданса и введенного ММГ подключены ко входу блока регистрации сигналов, при этом в блок реализации управляющих воздействий введен модем, выполненный с возможностью обмена данными с модемом, находящимся в блоке регистрации биосигналов.
Предлагаемое изобретение иллюстрируется следующими графическими материалами.
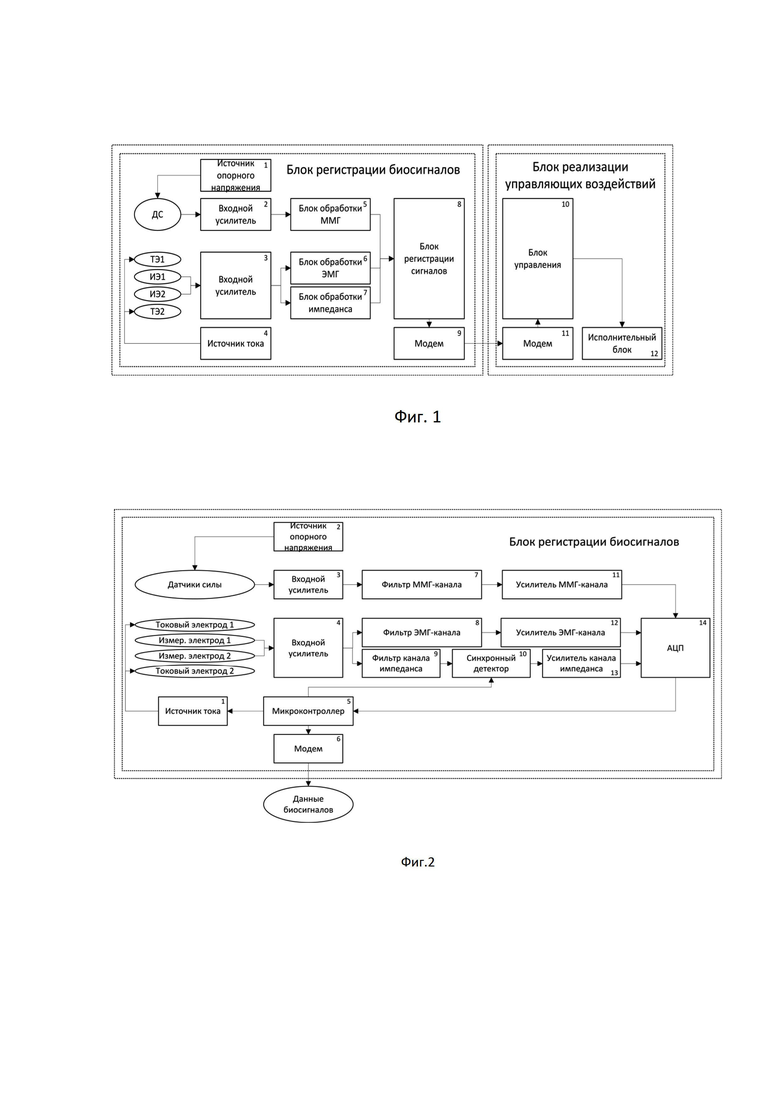
Фиг. 1 Обобщенная структурная схема комплекса бионического управления.
Фиг. 2 Структурная схема блока регистрации биосигналов.
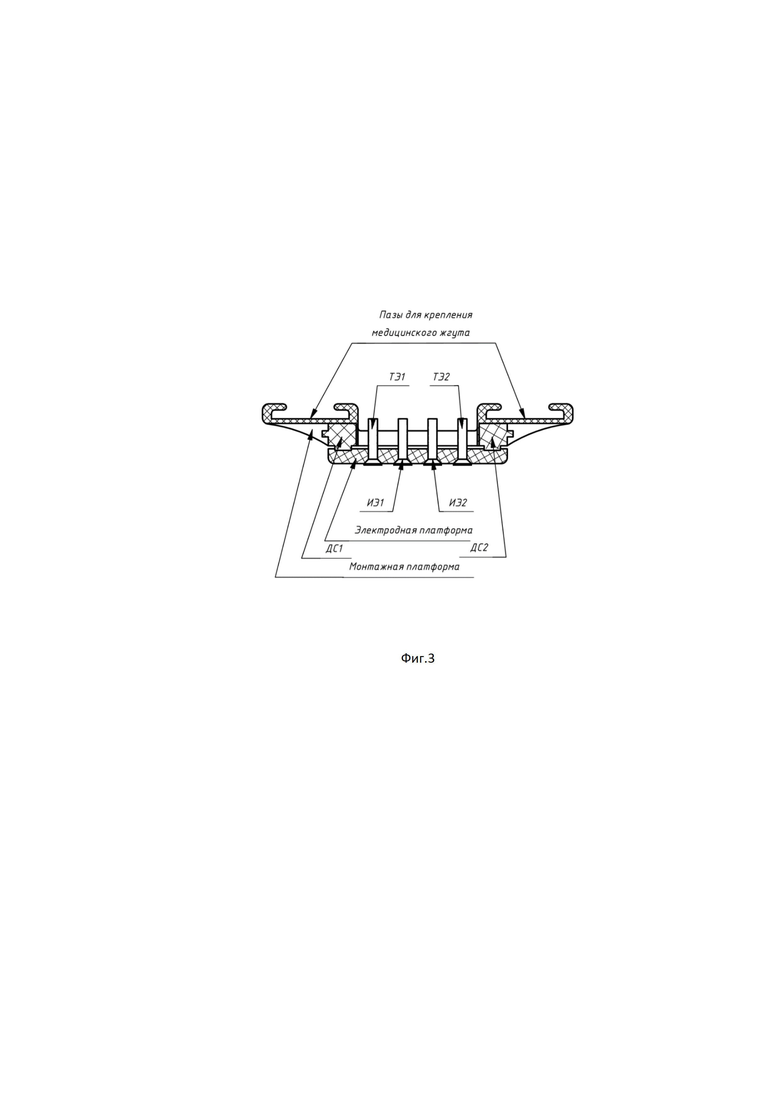
Фиг. 3 Электродная сборка для регистрации биосигналов.
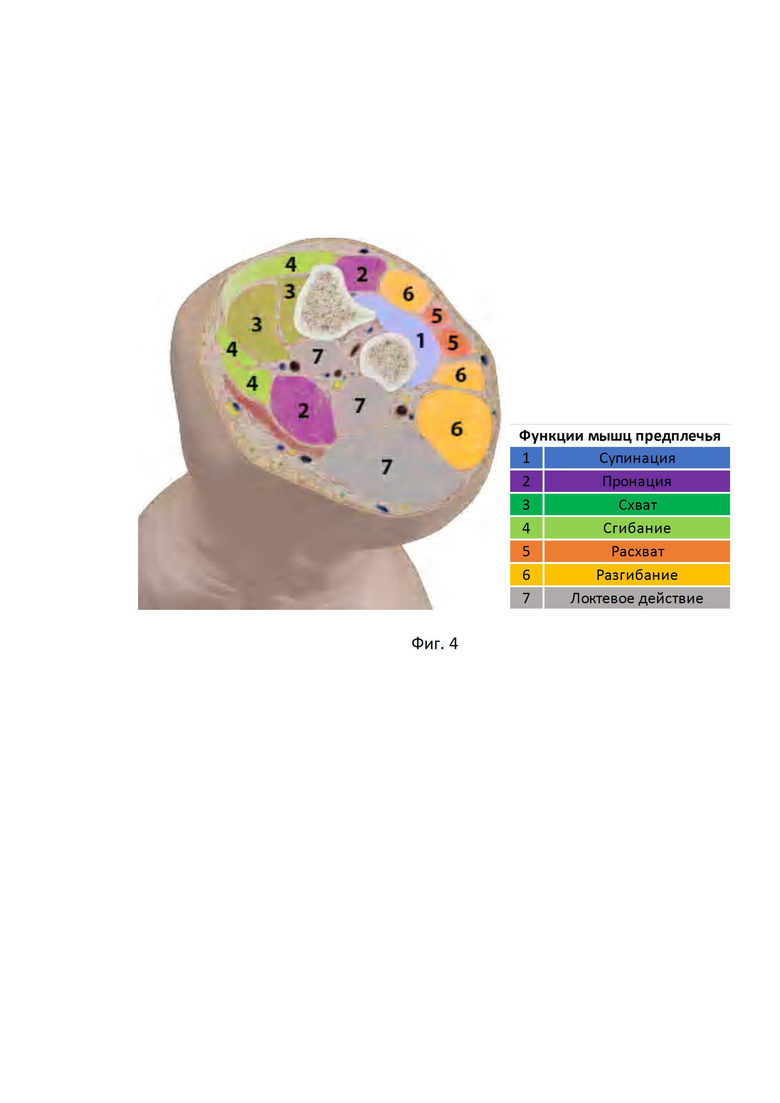
Фиг. 4 Проекции задействованных мышц предплечья по отношению к выполняемому действию.
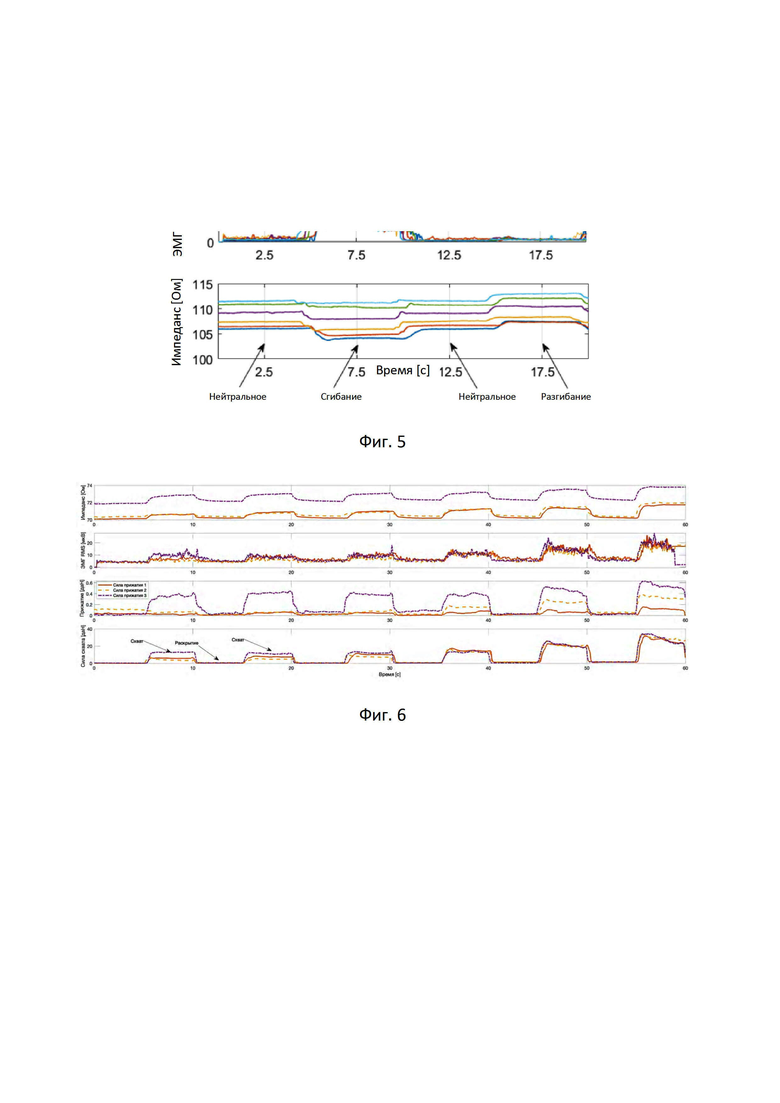
Фиг. 5 Пример биосигналов при сгибании/разгибании кисти.
Фиг. 6 Пример биосигналов при схвате/раскрытии кисти.
Комплекс бионического управления (фиг. 1) техническими устройствами содержит два последовательно подключенных друг к другу блока: блок регистрации биосигналов и блок реализации управляющих воздействий, который является выходом комплекса.
Блок регистрации биосигналов включает в себя источник тока (4), подключенный к двум токовым электродам (ТЭ1, ТЭ2). Дифференциальный сигнал с двух измерительных электродов (ИЭ1, ИЭ2) подается на входной усилитель (3). Выход входного усилителя (3) подключен к входам блоков обработки сигналов ЭМГ (6) и импеданса (7) соответственно. Третий информационный канал представлен датчиком силы (ДС), который питается источником опорного напряжения (1). Сигнал с ДС подается на входной усилитель (2), выход которого подключен ко входу блоку обработки сигналов ММГ (5). Рассмотренные блоки обработки (сигналов ММГ (5), ЭМГ (6) и импеданса (7)) подключены к блоку регистрации сигналов (8), который может быть общим блоком для всех, так и отдельным для каждого из каналов.
В блок реализации управляющих воздействий вводят модем (11), выполняющий коммуникацию с модемом (9), находящимся в блоке регистрации биосигналов. Благодаря использованию данной технологии возможно увеличение количества каналов путем объединения блоков регистрации биосигналов и блока реализации управляющих воздействий в информационную сеть.
Описанный выше комплекс бионического управления техническими устройствами работает следующим образом (фиг. 2). Находящийся в блоке регистрации биосигналов микроконтроллер (5) подает задающее напряжение на источник тока (1), который преобразует это напряжение в дифференциальный переменный электрический ток частотой 100 кГц и амплитудой 3 мА. Этот ток подается на токовые электроды электродной сборки, расположенной на поверхности кожных покровов над интересующей мышцей. Дифференциальное напряжение на измерительных электродах, которое регистрирует входной усилитель (4), представляет собой сумму синфазной помехи, сигнала ЭМГ и амплитудно-модулированного напряжения на частоте 100 кГц, представляющего собой разность потенциалов, возникающую от воздействия источника тока (1) (сигнал электрического импеданса). Основное назначение входного усилителя (4) - подавление синфазной помехи. Сигнал ЭМГ отделяется от сигнала электрического импеданса полосовым фильтром (8) ЭМГ канала с полосой пропускания от 50 Гц до 500 Гц. Амплитудно-модулированный сигнал электрического импеданса отделяется от сигнала ЭМГ полосовым фильтром (9) канала импеданса с полосой пропускания от 10 кГц до 1 МГц и детектируется синхронным детектором (10). Для работы синхронного детектора (10) в качестве несущей опорной частоты микроконтроллер (5) генерирует тот же опорный сигнал, что и для соответствующего источника тока (1). ММГ может регистрироваться с помощью ДС Honeywell FSG15N1A, питающийся от источника опорного напряжения (2). Сигнал с ДС подается на входной усилитель (3), обеспечивающий удаление синфазной помехи, затем на фильтр ММГ канала (7) и дополнительно усиливается с помощью усилителя ММГ канала (11). После дополнительного усиления, сигналы со всех каналов (11, 12, 13) оцифровываются с помощью аналогово-цифрового преобразователя (АЦП) (14), который может быть общим для всех каналов, так и отдельным для каждого. С помощью модема (6) данные биосигналов передаются дальше в блок реализации управляющих воздействий на объект управления посредством общепринятых интерфейсов передачи (USB, CAN, Bluetooth и т.п.).
Таким образом получают управляющие сигналы при использовании одного отведения (при регистрации биосигналов с одной области). При необходимости увеличения количества распознаваемых комплексом действий возможно добавление отведений путем подключения дополнительных блоков регистрации биосигналов к модему блока реализации управляющих воздействий. При регистрации перекосов электродной системы используются два ДС.
Для рассматриваемого комплекса бионического управления техническими устройствами может использоваться электродная сборка (фиг. 3), выполненная на основе тетраполярной системы отведения и двух датчиков силы, закрепленных в монтажной платформе, в которой предусмотрены пазы для крепления медицинских жгутов, которые позволяет надежно зафиксировать электродную сборку для регистрации сигналов.
Электродная сборка располагается на области предплечья, в проекциях интересующих мышц (например, разгибателей и сгибателей кисти) (фиг. 4). Оператор напрягает и расслабляет мышцы так же, как при естественных движениях кисти. С измерительных электродов и датчиков силы регистрируются сигналы, в результате их преобразования на исполнительный блок поступают управляющие сигналы, несущие информацию о совершенном мышечном движении.
Пример биосигналов в рамках одного исследования при расположении электродной сборки в проекции мышц-разгибателей при выполнении добровольцем сгибания-разгибания кисти в зависимости от различных степеней прижатия электродной системы представлен на фиг. 5.
Пример биосигналов в рамках одного исследования при расположении электродной сборки в проекции мышц, участвующих при схвате, при выполнении добровольцем схвата-раскрытия кисти в зависимости от различных степеней прижатия электродной системы представлен на фиг. 6.
ЭМГ и ММГ сигналы несут информацию о степени мышечного сокращения, а совместный анализ сигналов ЭМГ, ММГ и импеданса позволяет определить тип совершаемого действия. В результате работы алгоритма совместного анализа биосигналов вычисляются значения текущей степени действия и его тип, на основе которых формируются соответствующие команды управления на исполнительный блок.
Пример 1. Управление экзоскелетом
Электродные системы (блоки регистрации биосигналов, фиг.1) размещаются в проекциях мышц-антагонистов. Оператор осуществляет естественные движения этими мышцами (например, сгибает-разгибает кисть). После вычисления степени сгибания кисти в блоке управления (10) блока реализации управляющих воздействий (фиг. 1), сигнал передается на исполнительный блок 12 (фиг. 1) - привод экзоскелета. Для управления разными типами движений, необходимо расположить по две пары электродных систем на соответствующие мышцы-антагонисты.
Пример 2. Управление компьютером (например, громкостью звука)
Электродные системы (блоки регистрации биосигналов, фиг.1) размещаются в проекциях мышц-антагонистов (например, сгибателей-разгибателей кисти) на здоровой руке или на культе (если оператор-инвалид). Вычисленное значение текущей степени сгибания кисти в блоке управления (10) блока реализации управляющих воздействий (фиг. 1) передается на на исполнительный блок 12 (фиг. 1), который соединяется с компьютером по одному из стандартных интерфейсов (USB, последовательный порт, ИК-порт). Специализированное программное обеспечение компьютера принимает полученную информацию о степени сгибания кисти и устанавливает громкость звука, равную текущей степени сгибания кисти.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и комплекс бионического управления техническими устройствами | 2020 |
|
RU2756162C1 |
| Способ измерения гипертрофии скелетных мышц и комплекс для его реализации | 2020 |
|
RU2773610C2 |
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2016 |
|
RU2627818C1 |
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2017 |
|
RU2673151C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНОЙ БИОНИЧЕСКОЙ КОНЕЧНОСТЬЮ | 2016 |
|
RU2635632C1 |
| СИСТЕМА, РЕГИСТРАТОР И СПОСОБ ПОВЕРХНОСТНОЙ ЭЛЕКТРОМИОГРАФИИ | 2016 |
|
RU2732344C2 |
| Устройство для управления биоэлектрическим протезом | 1985 |
|
SU1337082A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ БОДРСТВОВАНИЯ ЧЕЛОВЕКА | 2016 |
|
RU2734329C2 |
| Способ восстановления двигательной функции конечности | 2019 |
|
RU2703838C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ УСТРОЙСТВАМИ С ПОМОЩЬЮ ЭЛЕКТРОМИОГРАФИЧЕСКОГО УСТРОЙСТВА СЧИТЫВАНИЯ | 2017 |
|
RU2683859C1 |
Изобретение относится к медицине, а именно к комплексам бионического управления техническими устройствами. Комплекс содержит последовательно подключенные друг к другу блок регистрации биосигналов и блок реализации управляющих воздействий, содержащий последовательно включенные блок управления и исполнительный блок. Блок регистрации биосигналов включает в себя источник тока, два выхода которого подключены соответственно к двум токовым электродам. Два измерительных электрода подключены ко входам входного усилителя, выход которого является входом блоков обработки каналов электромиограммы (ЭМГ) и импеданса соответственно. В блок регистрации биосигналов введен датчик механомиографического (ММГ) канала, питающийся от источника опорного напряжения, сигнал с которого подается на входной усилитель, выход которого подключен последовательно ко входу блока обработки ММГ. Выходы блоков обработки каналов ЭМГ, импеданса и введенного ММГ подключены ко входу блока регистрации сигналов. В блок реализации управляющих воздействий введен модем, выполненный с возможностью обмена данными с модемами, находящимися в блоках регистрации биосигналов. Достигается повышение точности управления техническими устройствами. 6 ил.
Комплекс бионического управления техническими устройствами, содержащий последовательно подключенные друг к другу блок регистрации биосигналов и блок реализации управляющих воздействий, содержащий последовательно включенные блок управления и исполнительный блок, являющийся выходом комплекса, в котором блок регистрации биосигналов включает в себя источник тока, два выхода которого подключены соответственно к двум токовым электродам, два измерительных электрода подключены ко входам входного усилителя, выход которого является входом блоков обработки каналов электромиограммы (ЭМГ) и импеданса соответственно, отличающийся тем, что в блок регистрации биосигналов введен датчик механомиографического (ММГ) канала, питающийся от источника опорного напряжения, сигнал с которого подается на входной усилитель, выход которого подключен последовательно ко входу блока обработки ММГ, выходы блоков обработки каналов ЭМГ, импеданса и введенного ММГ подключены ко входу блока регистрации сигналов, при этом в блок реализации управляющих воздействий введен модем, выполненный с возможностью обмена данными с модемами, находящимися в блоках регистрации биосигналов.
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2016 |
|
RU2627818C1 |
| DE 102018205306 B3, 18.07.2019 | |||
| US 20190192371 A1, 27.06.2019 | |||
| FR 2920087 B1, 23.10.2009 | |||
| US 8376968 B2, 19.02.2013. | |||

