Изобретение относится к медицине и медицинской технике, а именно к неврологии, и предназначено для реабилитации пациентов с патологией моторных функций нижних и верхних конечностей. На сегодняшний день актуальна задача социальной адаптации инвалидов и лиц, страдающих нарушениями опорно-двигательного аппарата. Способ реализуется на ранних сроках после возникшей патологии центральной, периферической нервной системы или опорно-двигательного аппарата, проводимой путем лечебной гимнастики с помощью сгибающего и разгибающего механотренажера.
Восстановление двигательной функции достигается благодаря тонизирующему и трофическому (замещающему) воздействию на опорно-двигательный аппарат человека, формированию функциональных компенсаций. Изобретение может быть использовано, преимущественно, после травм; заболеваниях ортопедической направленности; парезах (частичных параличах, которые проявляются в ослаблении функций органа); после хирургических операций, когда нужно восстановить функции организма; болезнях сердца, легких и других внутренних органов; заболеваниях неврологического характера.
Известны технические решения RU №№2644295, 2538133, 2523349, 2338503, 2309721, предназначенные для реабилитации при заболеваниях, и восстановления функции органов, имеющих указанные поражения.
Известный способ реабилитационного лечения обездвиженного больного заключается в том, что возбуждают клетки нервной ткани путем импульсного адекватного, в физиологических параметрах, воздействия на афферентные и эфферентные волокна за счет пассивного растяжения и сжатия мышечной ткани, сгибания и разгибания конечностей и туловища в суставах путем многократно повторяемого циклического движения, по крайней мере, спины, туловища, верхних и нижних конечностей, а также всего тела, с помощью функциональной реанимационно-реабилитационной кровати с подвижными секциями спины, туловища, нижних и верхних конечностей, а также всего тела, механизмами их регулирования и блоком управления кровати, выполненной с возможностью подъема на заданный угол выбранного сегмента кровати, сохранения положения сегмента на заданное время и возращения его в исходное положение за заданный интервал времени; последовательность изменения положений сегментов тела человека, значение углов и скорости подъема, экспозицию времени между изменениями положения сегментов тела человека устанавливают в зависимости от имеющейся патологии у пациента и варьируют в ходе проведения реабилитационных мероприятий в зависимости от клинических проявлений течения заболевания, а воздействие проводят круглосуточно до восстановления функций внутренних органов и систем, восстановления самостоятельной двигательной активности (RU 2644295).
В данном способе параметры и последовательность моделирования пассивных движений больного устанавливают в зависимости от имеющейся патологии у пациента и варьируют в ходе проведения реабилитационных мероприятий в зависимости от клинических проявлений течения заболевания, без учета изменения электрической активности соответствующей мышцы или группы мышц, биоэлектрических потенциалов, возникающих в мышцах скелета при возбуждении нервных волокон, что не дает позволяет определить и формировать физиологически адекватные параметры повторяемого циклического движения для активизации внутренних резервов организма и создания афферентных потоков, обеспечивающих достижение реабилитации.
Наиболее близким к заявляемому техническим решением является способ восстановления двигательной активности верхней и нижней конечностей человека, заключающийся в закреплении конечности в механотренажере, измерении электромиографического сигнала на поверхности конечности при ненапряженной мышце или группе мышц для сгибания/разгибания конечностей и при напряженной мышце или группе мышц для сгибания/разгибания конечностей, усилении и преобразовании аналогового сигнала в цифровой, и формировании для механотренажера управляющих команд начала, остановки или изменения скорости движения конечности пациента. При этом до формирования управляющих команд для механотренажера в зарегистрированных электромиографических сигналах отфильтровывают фильтром Баттерворта 4-го порядка шумы, удаляют полосу частот от 48 Гц до 52 Гц, удаляют полосы частот ниже 35 Гц и выше 45 Гц, выделяют необходимую для анализа полосу частот и показатель фонового электромиографического сигнала для ненапряженной мышцы, вычисляют мощность фонового фильтрованного электромиографического сигнала PWRr зарегистрированного в течение времени Тг=~ 10 сек для каждой ненапряженной мышцы, затем фиксируют полученное значение PWRr показателя фонового ЭМГ-сигнала для определенной ненапряженной мышцы, вычисляют мощность ЭМГ-сигнала, зарегистрированного в течение времени Tt = ~ 1 сек, каждой напряженной мышцы, и формируют для механотренажера 8 управляющие команды начала, остановки или изменения скорости движения конечности пациента с учетом соотношения текущей мощности электромиографического сигнала к фоновой мощности электромиографического сигнала (PWRt / PWRr) для данного отрезка времени Tt и определенной мышцы (RU 2644295, прототип).
Недостатки известного способа определяются тем, что при его реализации неизбежно существенное несоответствие посылаемого пациентом в мышцу импульса принудительному движению механотренажера, производимому с задержкой около 1 сек, что не позволяет достигнуть высокой степени синхронизации и согласования степени мышечного напряжения и параметров движения приводимой конечности пациента. При этом имеет место неравномерность в полосе пропускания импульсов, искажающая исходный электромиографический сигнал, а узкая полоса частот пропускания от 35 Гц до 45 Гц приводит к потере большей части электромиографического сигнала, частота которого может превышать 200 Гц. Одновременно ограничиваются функциональные возможности известного способа, т.к. при его реализации невозможно формирование управляющих команд, которые полностью воспринимались бы пациентом как управление в реальном времени, а также применение данного способа для пациентов с оценкой изменения двигательной функции - в 1 балл. Также результативность процедуры реабилитации ограничена вследствие определения управляющих команд для механотренажера на основании соотношения текущей мощности электромиографического сигнала к фоновой мощности электромиографического сигнала (PWRt / PWRr), причем только в расслабленном и напряженном состоянии, из-за чего целевое интуитивное согласование (корреляция) напряжения мышц пациента производимому движению в приводимой конечности достигается в незначительной степени. Это существенно искажает структуру и «размывает» афферентные потоки, т.е. информацию, поступающую в мозг от рецепторов, что препятствует обеспечению проприоцепционного управления принудительным движением с помощью механотренажера. Несогласованные движения порождают афферентный поток с выраженными патологическими свойствами, а формируемая на его основе система двигательных координаций будет иметь патологические проявления и, тем самым, тормозить процесс нейропластичности и препятствовать эффективной реабилитации.
Проблемой, разрешаемой с помощью предлагаемого технического решения, является повышение эффективности реабилитации при заболеваниях, приводящих к двигательному дефициту верхней и нижней конечностей, в процессе многократного целенаправленного повторения движений, при которых происходит формирование афферентного потока и процесса нейропластичности.
Техническим результатом данного способа, обеспечивающим разрешение указанной проблемы, является обеспечение высокой степени соответствия посылаемого в мышцу импульса производимому механотренажером принудительному движению, благодаря оптимизации соотношения полезного сигнала и шума, в том числе, при низкой интенсивности электромиографического сигнала (ЭМГ-сигнала), особенно характерной для пациентов с оценкой изменения двигательной функции в 1 балл. При реализации заявляемого способа обеспечивается возможность формирования управляющих команд в реальном времени, поскольку регистрируемый при этом ЭМГ-сигнал преобразуется в вейвлет-спектрограмму текущего напряжения мышцы/группы мышц на временных интервалах менее 0,2 сек, т.е. практически с полной синхронизацией мышечного напряжения и параметров движения приводимой механотренажером конечности пациента. Вследствие этого имеет место двигательный (проприоцептивный) анализ, реализуемый с помощью программного модуля (блока обработки), который обеспечивает формирование так называемого «мышечного чувства» при изменении напряжения мышц реабилитируемой конечности, их оболочек, суставных сумок, связок, сухожилий. Практически исключается несоответствие (снижение корреляции) интуитивного уровня напряжения восстанавливаемой мышцы реабилитируемой конечности производящему движению механотренажера, что способствует ускоренному запуску процесса нейропластичности и возникновению при этом афферентного потока, являющегося главным фактором восстановления двигательных функций. В ходе сеанса проприоцептивная афферентация участвует не только в регуляции моторной деятельности, но и в активации поведения. При активации пациентом мышечных и сухожильных рецепторов и попытке сделать движение афференция поддерживает постоянный уровень возбуждения мотонейронов и интернейронной сети, от которой зависит реализация сегментарных рефлексов и работа эффекторного аппарата на основе преобладания положительных реакций. Активируемые афферентным потоком супраспинальные структуры мозга начинают постепенно целенаправленно формировать новую структуру связей и восстанавливать двигательные координации. При этом структура афферентного потока, его пространственно-временной паттерн, максимально приближены к нормальному, чем обеспечена полноценная двигательная реабилитация при использовании заявляемого способа, поскольку тренируемые в сеансе механотерапии движения максимально коррелированы и синхронизированы с собственными управляющими нервными импульсами пациента, что обеспечивает обратное благоприятное развитие атрофических и дегенеративных процессов, нормализацию функциональной целостности и деятельности организма, т.е. высокую эффективность реабилитации.
Повышение стато-кинетической устойчивости неизбежно связано с рефлекторным формированием приятного тона эмоциональных ощущений, благодаря подавлению симптоматики болезни движения и торможения проявления неприятного тона эмоциональных ощущений. Также важно учитывать, что повышение устойчивости вестибулярных реакций сопровождается повышением качеств нервной активности: силы, уравновешенности, подвижности, что благоприятно сказывается на координации нейро-моторного реагирования в стрессорной ситуации организма.
Сущность изобретения заключается в том, что способ восстановления двигательной функции конечности предусматривает фиксацию реабилитируемой конечности пациента в реабилитационном механотренажере, выполненном с возможностью осуществления циклического сгибания и разгибания реабилитируемой конечности пациента, для чего в ходе сеанса с помощью электродов, установленных на поверхности кожи поверх приводящей в движение реабилитируемую конечность восстанавливаемой мышцы, осуществляют регистрацию электромиографических сигналов с последующим формированием программным модулем сигналов управления, передаваемых двигателю механотренажера на принудительное движение, компенсирующее недостающую силу реабилитируемой конечности, причем регистрируют максимальный, фоновый и управляющий электромиографические сигналы при максимально напряженной, ненапряженной и промежуточно напряженной в ходе сеанса мышце, соответственно, поступающие в программный модуль для преобразования зарегистрированных сигналов в цифровые, анализа и обработки в выбранной полосе частот и осуществляет формирование сигналов управления, передаваемых двигателю механотренажера, в соответствии со значением показателя, определяемого на основании соотношения зарегистрированных электромиографических сигналов, причем анализ зарегистрированных и преобразованных в цифровые фонового, максимального и управляющего электромиографических сигналов осуществляют путем вейвлет-преобразования с получением вейвлет-спектрограмм, характеризующих распределение амплитуд указанных электромиографических сигналов по частотам на временных интервалах не более 0,2 сек, в диапазоне частот от 10 до 2000 ГЦ, а в качестве значения показателя определяют значение интегрального показателя, определяемого на основании соотношения указанных зарегистрированных электромиографических сигналов, для чего производят вычитание значения каждой из амплитуд вейвлет-спектрограммы фонового сигнала из соответствующей по частоте амплитуды максимального и управляющего сигналов, деление значения разностей амплитуд управляющего и фонового сигнала на соответствующую по частоте разницу амплитуд максимального и фонового сигнала, а также суммирование отношений указанных разностей амплитуд, с получением в результате суммирования значения интегрального показателя, в соответствии с которым программный модуль формирует в реальном времени сигналы, коррелированные с мышечным усилием пациента.
Предпочтительно, анализ зарегистрированных и преобразованных в цифровые фонового, максимального и управляющего электромиографических сигналов осуществляют путем вейвлет-преобразования с получением вейвлет-спектрограмм, характеризующих распределение амплитуд указанных электромиографических сигналов по частотам на временных интервалах не более 0,2 сек, в диапазоне частот от 10 до 2000 ГЦ, с помощью программного модуля, выполненного в виде программируемой логической интегральной схемы, выполненной с возможностью осуществления вейвлет-преобразования на основе вейвлет-функции Морле.
Предпочтительно, анализ зарегистрированных и преобразованных в цифровые фонового, максимального и управляющего электромиографических сигналов осуществляют с помощью программируемой логической интегральной схемы, выполненной с возможностью вейвлет-преобразования с получением вейвлет-спектрограмм управляющего сигнала в виде ряда амплитуд:  ,
,  , …,
, …,  ,
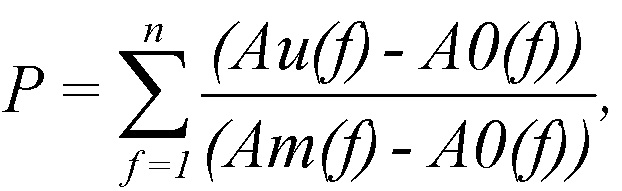
,  , и определения значения интегрального показателя из соотношения:
, и определения значения интегрального показателя из соотношения:
где:
P - интегральный показатель;
 - порядковый номер частоты в вейвлет-спектрограмме управляющего электромиографического сигнала при промежуточно напряженной мышце;
- порядковый номер частоты в вейвлет-спектрограмме управляющего электромиографического сигнала при промежуточно напряженной мышце;
 - количество частот в вейвлет-спектрограмме;
- количество частот в вейвлет-спектрограмме;
=1 - самая низка частота вейвлет-спектрограммы, соответствует значению частоты в 10 Гц;
=n - самая высокая частота вейвлет-спектрограммы, соответствует значению частоты в 2000 Гц;
 - значение амплитуды вейлет-спектрограммы управляющего сигнала для частоты с порядковым номером f;
- значение амплитуды вейлет-спектрограммы управляющего сигнала для частоты с порядковым номером f;
- значение амплитуды вейлет-спектрограммы управляющего сигнала для частоты с порядковым номером 1;
- значение амплитуды вейлет-спектрограммы управляющего сигнала для частоты с порядковым номером n;
 - значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером ;
- значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером ;
 - значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером 1;
- значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером 1;
 - значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером n;
- значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером n;
 - значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером f;
- значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером f;
 - значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером 1;
- значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером 1;
 - значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером n.
- значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером n.
Предпочтительно, фоновый и максимальный электромиографические сигналы регистрируются перед началом сеанса, причем регистрация фонового электромиографического сигнала осуществляется при полном расслаблении восстанавливаемой мышцы реабилитируемой конечности, а регистрация максимального электромиографического сигнала осуществляется при максимальном напряжении восстанавливаемой мышцы реабилитируемой конечности пациентом, после чего пациент производит в ходе сеанса циклическое напряжение и расслабление восстанавливаемой мышцы реабилитируемой конечности, при которых каждый из зарегистрированных управляющих электромиографических сигналов преобразуется в вейвлет-спектрограмму с получением указанного выше интегрального показателя, соответствующего состоянию напряжения восстанавливаемой мышцы реабилитируемой конечности в каждый момент измерения, в соответствии с которым программный модуль формирует в реальном времени последовательность коррелированных с мышечным усилием пациента сигналов для управления двигателем механотренажера.
Предпочтительно, регистрацию значений напряжения электромиографического сигнала пациента производится с помощью группы из трех электродов, устанавливаемых на поверхности кожи поверх восстанавливаемой мышцы пациента, приводящей в движение реабилитируемую конечность, причем центральный электрод крепится поверх восстанавливаемой мышцы, а два крайних электрода располагаются на равном расстоянии по обе стороны от центрального электрода.
Предпочтительно, на поверхность кожи пациентов устанавливаются дополнительные группы электродов поверх группы мышц, принимающих вспомогательное участие в движении реабилитируемой конечности одновременно с восстанавливаемой мышцей, с последующим вычитанием после преобразования сигнала в цифровую форму из регистрируемых электромиографических сигналов электродов восстанавливаемой мышцы сигналов дополнительных групп электродов для исключения влияния электромиографического сигнала группы мышц, принимающих вспомогательное участие в движении реабилитируемой конечности, при вычислении интегрального показателя восстанавливаемой мышцы
Предпочтительно, при реализации способа пациент располагается лежа или в полусидячем положении, при этом реабилитируемая конечность фиксируется на реабилитационном механотренажере.
Предпочтительно, реабилитационный механотренажер располагается на регулируемой платформе, выполненной с возможностью адаптации положения механотренажера для проведении сеанса реабилитации пациента с полным отсутствием двигательной функции в условиях постельного режима.
Предпочтительно, разметку для установки электродов, нанесенную при первом сеансе, сохраняют при очередных сеансах на протяжении всего курса реабилитации.
Предпочтительно, электроды устанавливаются с помощью эластичной манжеты, выполненной с возможностью позиционирования электродов на реабилитируемой конечности с учетом анатомического строения пациента, а также с возможностью удержания электродов на реабилитируемой конечности на протяжении всего сеанса.
Предпочтительно, измеренные значения напряжения электромиографического сигнала пациента анализируют посредством искусственного интеллекта, осуществляющего классификацию преобразованного электромиографического сигнала с помощью искусственной нейронной сети программного модуля, предварительно обученной путем контроля нормального уровня показателя, определяемого измеренными значениями напряжения электромиографического сигнала, посредством предварительной серии сеансов, осуществляемых механотренажером для получения следующих характеристик реабилитируемой конечности:
- объем движения в суставах
- мощность мышц
- силу мышц
- выносливость мышц
- скорость сокращения мышц;
позволяющих врачу оценивать эффект, оказываемый на реабилитируемую конечность при проведении сеанса и, в соответствии с оценкой задавать длительность, интенсивность и количество последующих сеансов, необходимых для восстановления реабилитируемой конечности.
Предпочтительно, указанные выше характеристики реабилитируемой конечности анализируют посредством искусственного интеллекта, осуществляющего классификацию характеристик реабилитируемой конечности с помощью искусственной нейронной сети программного модуля, предварительно обученной путем контроля нормального уровня показателя, определяемого измеренными значениями характеристик реабилитируемой конечности, посредством серии сеансов, осуществляемых механотренажером под управлением программного модуля для получения длительности, интенсивности и количества сеансов необходимых для восстановления реабилитируемой конечности.
Предпочтительно, анализ и обработка регистрируемых электромиографических сигналов осуществляются в программном модуле в составе реабилитационного механотренажера, или в составе удаленного сервера, куда передается информация о зарегистрированных значениях электромиографического сигнала для анализа и обработки с помощью искусственной нейронной сети.
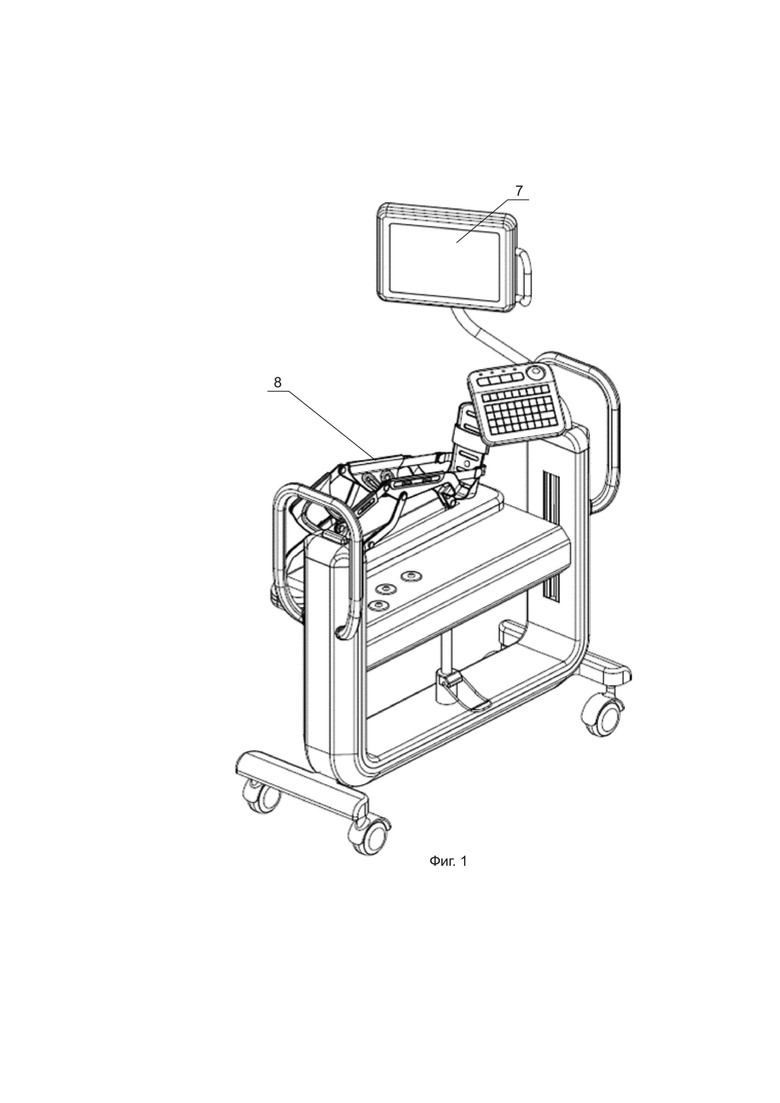
На чертеже фиг.1 изображен механотранажер, установленный на платформе,
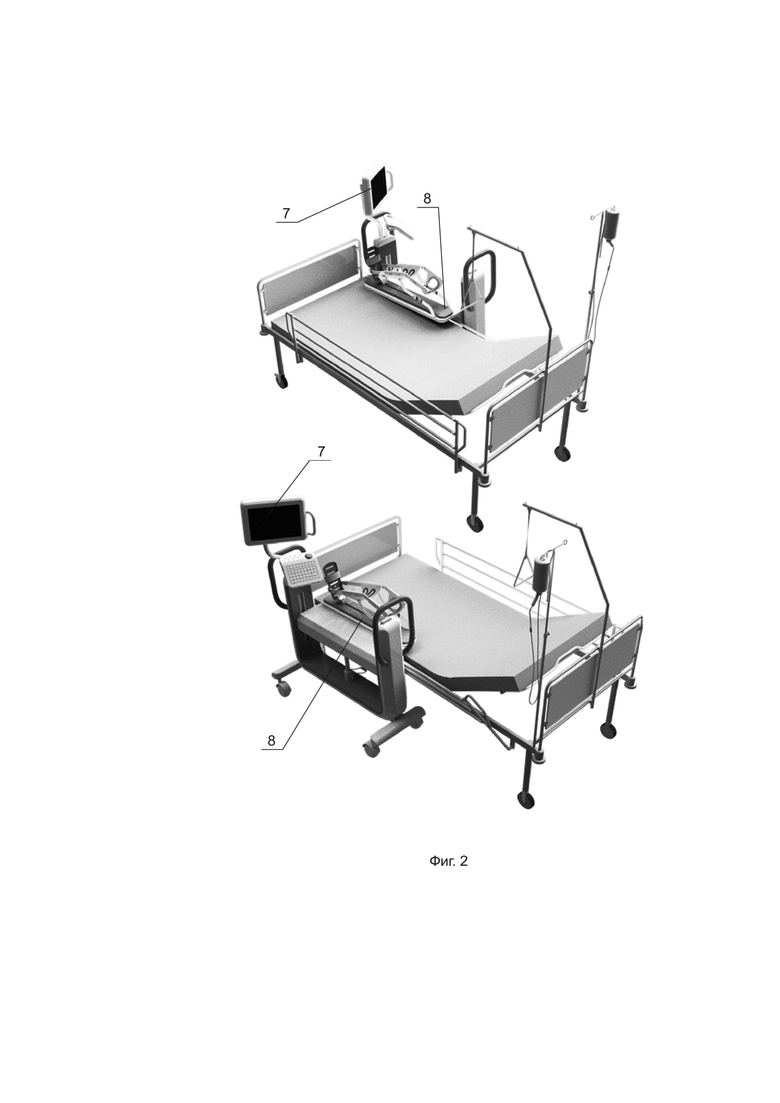
на фиг.2 - механотранажер, установленный на платформе, справа и слева от койки,
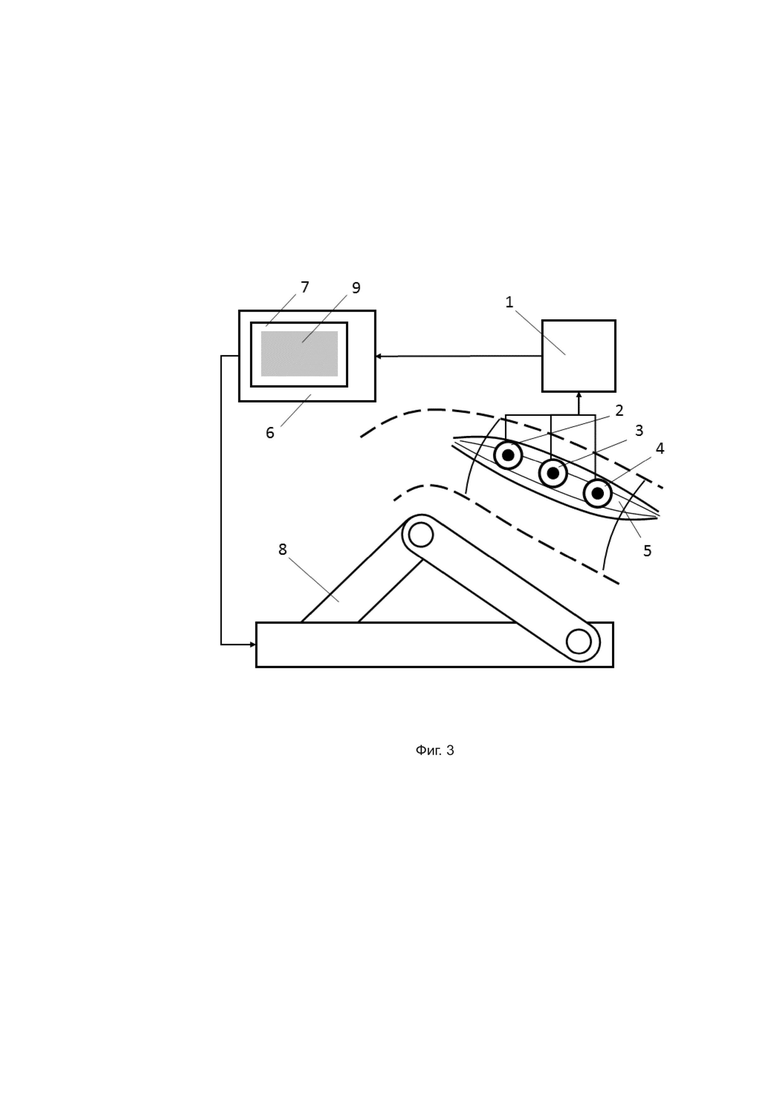
на фиг.3 - принципиальная блок-схема реализации способа восстановления двигательной функции конечности,
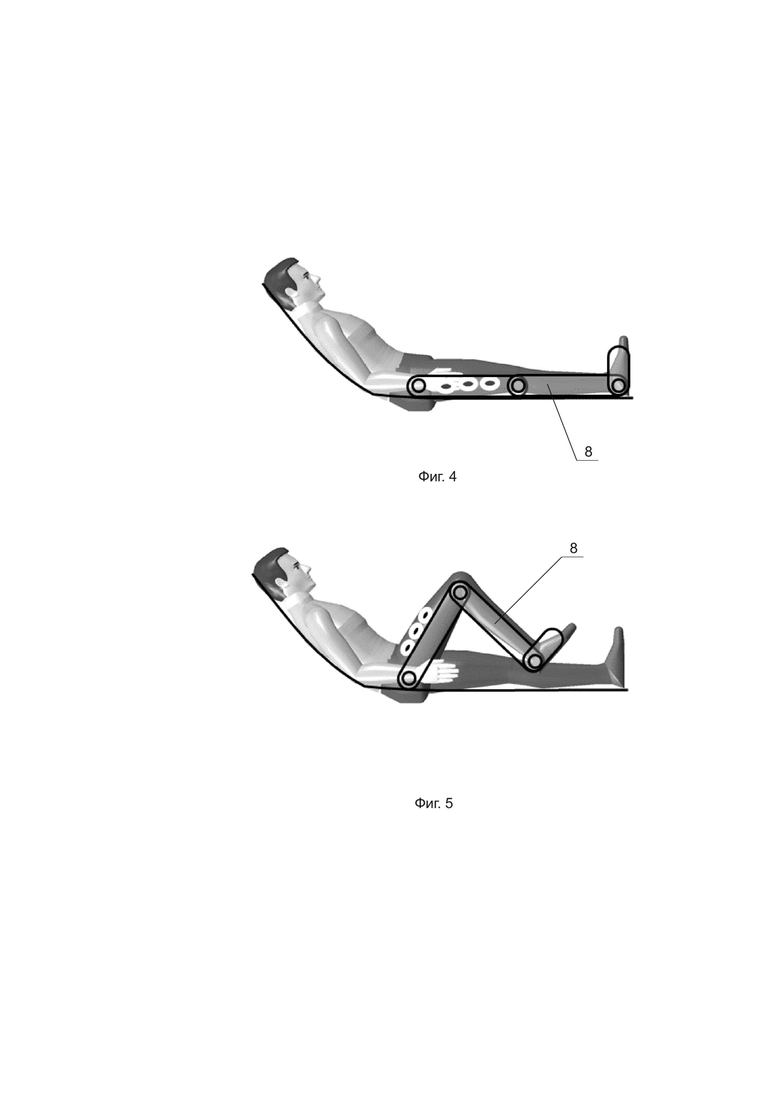
на фиг.4 - расположение пациента при разогнутой нижней конечности,
на фиг.5 расположение пациента при согнутой нижней конечности,
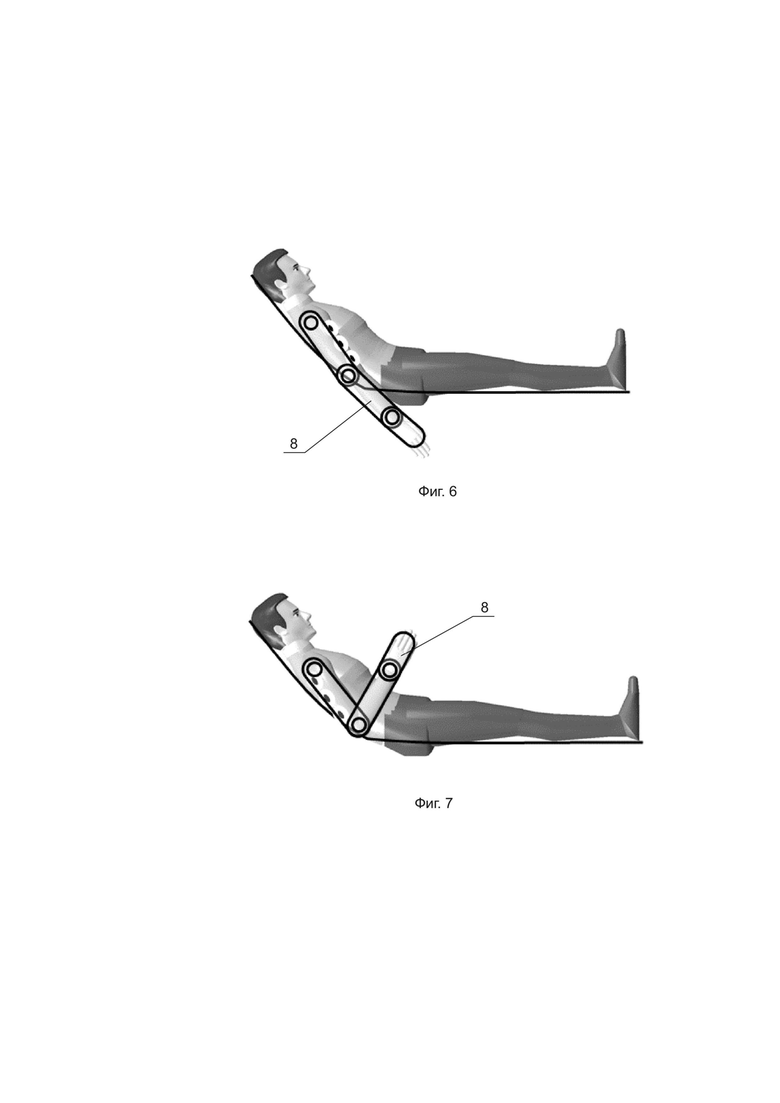
на фиг.6 - расположение пациента при разогнутой верхней конечности,
на фиг.7 - расположение пациента при согнутой верхней конечности,
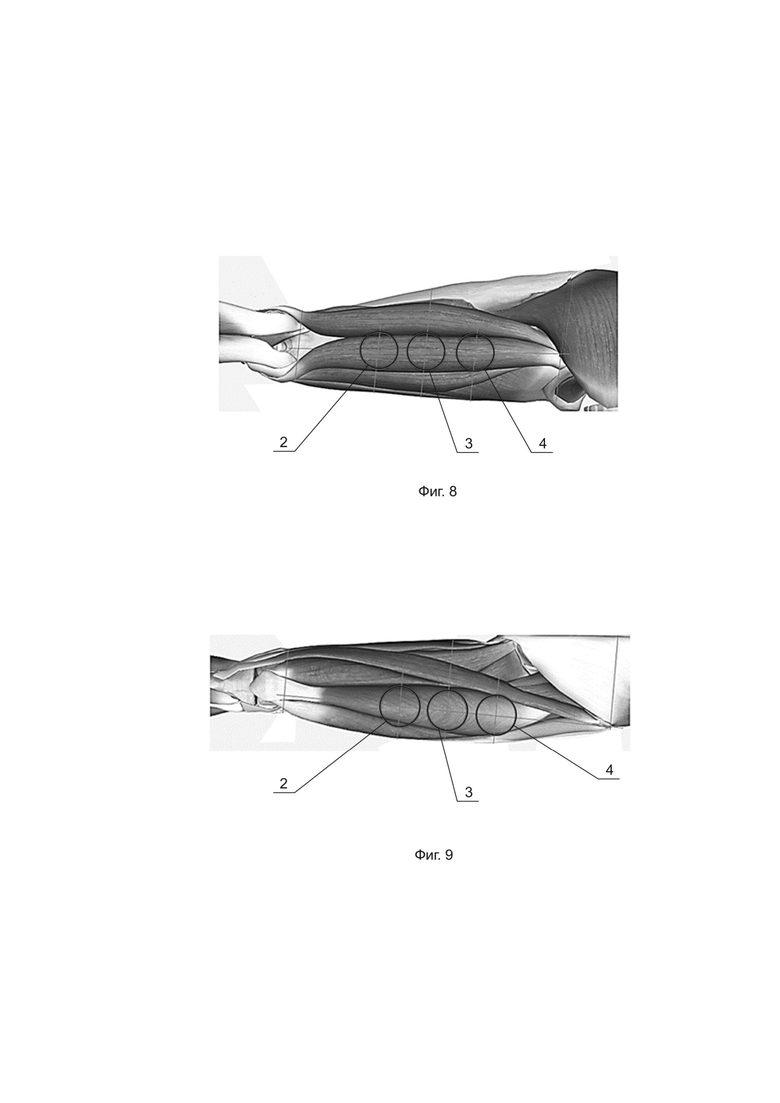
на фиг.8 - схема расположения электродов на мышцы-сгибатели бедра,
на фиг.9 - схема расположения электродов на мышцы-разгибатели бедра.
Способ реализуется следующим образом.
В основе метода лежит регулярная механотерапия с применением реабилитационного комплекса для разработки верхних и/или нижних конечностей, представляющая собой комплекс лечебных, профилактических и восстановительных упражнений (сеансов), направленных на улучшение подвижности суставов, отдельных мышц и их групп, для увеличения функциональной адаптации больного. Назначением курса реабилитации является приведение этих характеристик к нормальному уровню посредством серии сеансов.
Занятия могут проводиться как в стационарных условиях, так и на дому. В последнем случае врач по принципу телемедицины сможет в реальном времени управлять и наблюдать за ходом реабилитации пациента, диагностировать и анализировать данные о работе мышц и суставов дистанционно, с помощью компьютера из своего кабинета.
Способ предусматривает использование спектрограммы собственного электромиографического сигнала пациента для управления в реальном времени реабилитационным механотренажером, осуществляющим согласованное и синхронизированное с мышечным напряжением пациента принудительное движение в реабилитируемой конечности в ходе реабилитационной процедуры.
Действия, предусмотренные данным способом, направлены на реабилитацию пациентов с частичным и полным параличом. Такие пациенты не могут самостоятельно совершать движения конечностей, так как максимальная сила, которую могут развить восстанавливаемые (реабилитируемые) мышцы недостаточна для преодоления силы тяжести, упругого сопротивления мягких тканей, трения в суставах и силы, создаваемой мышцами-антагонистами. При этом восстанавливаемые мышцы способны на какое-то незначительное напряжение и при этом генерируют сигнал, энергию которого вычисляется посредством вейвлет-спектрограммы. В начале измерительной сессии такие пациенты пытаются совершить максимальное напряжение реабилитируемых мышц (возможно несколько попыток). ЭМГ сигнал, зарегистрированный при этом, является максимальным сигналом и, соответственно, имеет наибольшую энергию. Диапазон между энергиями ЭМГ сигналов при расслабленной и максимально напряженной мышце - это рабочий диапазон реабилитации, которым пациент в состоянии управлять. То есть, пациент может самостоятельно управлять напряжением мышцы в этом диапазоне (но движения конечности не происходит). С другой стороны, у здорового человека (или даже у здоровой конечности рассматриваемого пациента) есть аналогичный диапазон между энергиями ЭМГ сигналов при расслабленной и максимально напряженной мышце, который включает в себя упомянутый выше рабочий диапазон реабилитации.
Реабилитационный комплекс для реализации данного способа содержит:
- регистрирующий мышечный электромиографический сигнал (ЭМГ-сигнал) модуль 1, который состоит, как правило, из трех электродов 2,3,4 устанавливаемых на мышцу 5 пациента, отвечающую за движение реабилитируемой конечности. Каждый электрод 2,3,4, предпочтительно, состоит (не изображено) из основы - проводящей пластины площадью 1-20 см2, и проводника для передачи регистрируемых ЭМГ сигналов. Электроды 2,3,4 устанавливаются с помощью эластичной манжеты, выполненной с возможностью позиционирования электродов 2,3,4 на реабилитируемой конечности с учетом анатомического строения пациента, а также с возможностью удержания электродов 2,3,4 на реабилитируемой конечности на протяжении всего сеанса. Кроме того, на поверхность кожи пациентов могут устанавливаться дополнительные группы электродов (не изображено) поверх группы мышц, принимающих вспомогательное участие в движении реабилитируемой конечности одновременно с восстанавливаемой мышцей;
- программный модуль 6 (идентично - программный блок 6 обработки), связанный регистрирующим модулем 1 по проводному или беспроводному каналу обмена информацией, осуществляющий анализ ЭМГ-сигналов с помощью программируемой логической интегральной схемы (ПЛИС), и обладающий искусственным интеллектом, реализованным через алгоритм машинного обучения нейронной компьютерной архитектуры и установленным программным обеспечением (ПО). Блок 6 обработки (программный модуль 6) выполнен, например, с сенсорным дисплеем 7 для вывода электромиограммы и запуска режимов посредством;
- механотренажер 8 с приводящим механизмом, например, с шаговым двигателем, подключенным к блоку 6 обработки (программный модуль 6). Приводящий механизм состоит из кинематического звена, приводимого в движение мотором (не обозначен), и осуществляет принудительное движение в реабилитируемой конечности в соответствии с поступающим от блока 6 обработки (программный модуль 6) управляющим сигналом. Реабилитационный механотренажер 8 располагается, при необходимости, на регулируемой платформе, выполненной с возможностью адаптации положения механотренажера для проведении сеанса реабилитации пациента с полным отсутствием двигательной функции в условиях постельного режима, в соответствии со спецификой отделения.
ПО представляет собой интерфейс 9, позволяющий врачу на основе данных об уровне напряжения мышцы с помощью блока 6 обработки (программный модуль 6) формировать контролировать и анализировать процесс реабилитации конкретного пациента, а так же передавать и корректировать управляющий сигнал для приводящего механизма механотренажера 8..
При запуске программного обеспечения (ПО) производится создание профиля нового пациента или выбор уже существующего профиля. Анализ и обработка регистрируемых электромиографических сигналов осуществляются в блоке 6 - программном модуле 6 в составе реабилитационного механотренажера 8, или в составе удаленного сервера, куда передается информация о зарегистрированных значениях электромиографического сигнала для анализа и обработки под управлением программируемой логической интегральной схемы программного модуля 6 с помощью искусственной нейронной сети.
При создании профиля нового пациента вводятся следующие параметры: Имя пациента; Пол; Возраст; Рост; Вес; Срок дисфункциональности двигательного аппарата пациента (время, прошедшее с момента операции); Анамнез - краткое описание причины возникновения дисфункциональности.
Пациент располагается лежа или в полусидячем положении, при этом реабилитируемая конечность фиксируется на реабилитационном механотренажере 8. Его таз не должен быть перекошен, а линия, соединяющая передневерхние оси должна быть перпендикулярна срединно-сагитальной плоскости тела. Реабилитируемая конечность фиксируется на реабилитационном механотренажере 8, на поверхности кожи пациента в районе расположения мышцы/группы мышц, осуществляющих движение в реабилитируемой конечности, устанавливаются электромиографические датчики 2,3,4 ЭМГ сигналов.
Перед началом сеанса реабилитации для повышения точности регистрации сигнала требуется провести опрос и осмотр пациента, а также следующие предварительные действия:
- Устранение большинства фоновых электромагнитных помех - отключение сотовых телефонов, беспроводных модемов; отключение ноутбука, входящего в комплекс от сети;
- Подготовка поверхности кожи реабилитируемой конечности пациента к установке поверхностных электродов (удаление волос и обезжиривание);
- Разметка конечности для установки электродов 2,3,4 по следующей схеме:
Отводящие электроды 2,3,4 располагаются над двигательными точками мышц, которые анатомически соответствуют зоне расположения концевых пластинок терминальных ответвлений нервов. Двигательные точки обычно располагаются на наиболее выпуклой при сокращении части мышцы, в этой точке при стимуляции электрическим током минимальной силы наблюдается сокращение мышцы. Как правило, центральный электрод 3 располагается на равном расстоянии от мест крепления восстанавливаемой (реабилитируемой) мышцы реабилитируемой конечности к скелету. Крайние электроды 2,4 располагаются на расстоянии 70 мм от центрального электрода 3. При таком расстоянии амплитуда поверхностной электромиограммы обладает метрологическими признаками надежности и достоверности, т.е. незначительно меняется от измерения к измерению. Рекомендуется сохранять разметку, принятую для установки электродов 2,3,4 при первом и последующих сеансах, на протяжении всего курса реабилитации;
- Определение с помощью гониометрического устройства объема движения в реабилитируемом (например, коленном) суставе (ангулометрия) по В.О.Марксу) в объеме: амплитуды движений сгибания, разгибания, отведения и приведения.
Последовательность проведения реабилитационного сеанса:
1) Установка приводящего механизма реабилитационного механотренажера 8 и блока 6 обработки (программный модуль 6) в исходное положение.
2) Фиксация реабилитируемой конечности ремнями на приводном устройстве реабилитационного механотренажера 8.
3) Включение питания устройства регистрации блока 6 обработки (программный модуль 6).
4) Визуальное подтверждение соответствия проприоцепционного ощущения пациента и уровня сигнала электромиограммы электродов 2,3,4.
5) Регистрация фонового сигнала при полном расслаблении реабилитируемой группы мышц пациента.
6) Регистрация максимальной мощности мышечного напряжения. Рекомендуется проводить не менее трех измерений
7) Регистрация мышечной выносливости.
8) Ввод измеренного ранее объема движения в суставе реабилитируемой конечности и регистрация скорости сокращения.
9) Запуск движения реабилитируемой конечности с помощью реабилитационного механотренажера 8.
10) Проведение необходимого количество циклов движения реабилитируемой конечности с помощью реабилитационного механотренажера 8.
Субъективное восприятие процедуры сеанса пациентом представлено в Примерах 1-3
Пример №1: нога пациента закрепляется в аппарате механотерапии, на мышцах-сгибателях бедра размещаются электроды 2,3,4. Проводится процедура калибровки (не обязательно), затем пациент несколько раз пытается максимально напрячь реабилитируемые мышцы, при этом на экране интерфейса 9 виден график уровня энергии ЭМГ сигнала и пациент видит, как его усилие отображается на этом графике. Максимальное значение сохраняется и запускается режим управления аппаратом в реальном времени в скоростном режиме. Чем сильнее напрягает мышцы-сгибатели пациент, тем быстрее аппарат механотерапии, т.е. механотренажер 8 сгибает его ногу в коленном суставе. При расслаблении мышц-сгибателей уровень энергии сигнала снижается, скорость принудительного сгибания замедляется. При достижении энергии ЭМГ сигнала определенного порога принудительное движение прекращается, а при падении энергии ниже этого порога происходит принудительное разгибание конечности. При минимальном уровне сигнала происходит принудительное разгибание конечности с максимальной скоростью. Диапазон сгибания/разгибания задается перед началом упражнения.
Пример №2: аналогично примеру №1, но устанавливаются два набора электродов 2,3,4 как на мышцах-сгибателях, так и на мышцах разгибателях бедра. Для каждого набора электродов проводится оценка максимальной энергии ЭМГ сигнала. В ходе сеанса пациент может напрягать как сгибатели, так и разгибатели бедра. Управление механотренажером, 8 осуществляется на основании соотношения напряжения мышц. Если напряжение сгибателей больше напряжения разгибателей, то происходит принудительное сгибание, причем скорость сгибания тем выше, чем больше разница. Соответственно, если напряжение разгибателей больше напряжения сгибателей, происходит принудительное разгибание ноги в коленном суставе. Если характеристики равны, движения не происходит.
Пример №3: рука пациента закрепляется в механотренажере 8, на поверхности кожи в районе бицепса (являющегося в данном примере реабилитируемой мышцей) устанавливаются электроды 2,3,4, производится калибровка и оценка максимальной энергии ЭМГ сигнала, задается диапазон допустимого сгибания (например, от 0 до 90 градусов), после чего запускается режим управления аппаратом в реальном времени в позиционном режиме. Чем сильнее пациент напрягает бицепс и чем больше энергия ЭМГ сигнала, тем больше угол принудительного сгибания в локтевом суставе. Если пациент полностью расслабляет бицепс, аппарат приводит руку в исходное положение (угол сгиба 0 градусов), если пациент напряг и удерживает напряжение бицепса на уровне ЭМГ сигнала в 30% от максимального, то механотренажер 8 удерживает руку согнутой в локтевом суставе на 30%.
11) Завершение принудительного движения
12) Переход к повторному измерению параметров (повторные измерения амплитуды движений сгибания, разгибания, отведения и приведения).
13) Повторение пунктов 9,10,11
14) Выключение питания механотренажера 8 и устройства регистрации блока 6 обработки (программный модуль 6).
15) Снятие электродов 2,3,4.
Таким образом, способ восстановления двигательной функции конечности предусматривающий фиксацию реабилитируемой конечности пациента в реабилитационном механотренажере 8, выполненном с возможностью осуществления циклического сгибания и разгибания реабилитируемой конечности пациента. В ходе сеанса с помощью электродов 2,3,4, установленных на поверхности кожи поверх приводящей в движение реабилитируемую конечность восстанавливаемой мышцы, осуществляют регистрацию электромиографических сигналов, т.е. собственных мышечных импульсов (биоэлектрических потенциалов), с последующим формированием программным модулем 6 сигналов управления, передаваемых приводному двигателю механотренажера 8 на принудительное движение, компенсирующее недостающую силу реабилитируемой конечности, причем регистрируют максимальный, фоновый и управляющий электромиографические сигналы при максимально напряженной, ненапряженной и промежуточно напряженной в ходе сеанса мышце, соответственно, поступающие в программный модуль 6 для преобразования зарегистрированных сигналов в цифровые, анализа и обработки в выбранной полосе частот и осуществляет формирование сигналов управления, передаваемых двигателю механотренажера 8, в соответствии со значением показателя, определяемого на основании соотношения зарегистрированных электромиографических сигналов. Анализ зарегистрированных и преобразованных в цифровые фонового, максимального и управляющего электромиографических сигналов электродов 2,3,4 осуществляют путем вейвлет-преобразования с получением вейвлет-спектрограмм, характеризующих распределение амплитуд А указанных электромиографических сигналов по частотам на временных интервалах не более 0,2 сек, в диапазоне частот от 10 до 2000 ГЦ, а в качестве значения показателя определяют значение интегрального показателя Р, определяемого на основании соотношения указанных зарегистрированных электромиографических сигналов, для чего производят вычитание значения каждой из амплитуд вейвлет-спектрограммы фонового сигнала из соответствующей по частоте амплитуды максимального и управляющего сигналов, деление значения разностей амплитуд управляющего и фонового сигнала на соответствующую по частоте разницу амплитуд максимального и фонового сигнала, а также суммирование отношений указанных разностей амплитуд, с получением в результате суммирования значения интегрального показателя, в соответствии с которым программный модуль 6 формирует в реальном времени сигналы, коррелированные с мышечным усилием пациента. Корреляция заключается в том, что чем больше значение интегрального показателя Р, тем выше скорость вращения шагового двигателя механотренажера 8, то есть тем большее количество шагов в секунду совершает шаговый двигатель; соответственно, если управляющий электромиографический сигнал в ходе сеанса станет равен максимальному, то интегральный показатель будет иметь максимальное значение и скорость вращения двигателя будет максимальной, если управляющий электромиографический сигнал в ходе сеанса станет равен фоновому, то интегральный показатель Р будет равен нулю и скорость вращения будет равна нулю.
Так как регистрируемый блоком 6 обработки (программный модуль 6) в режиме реального времени посредством электромиографических датчиков 2,3,4 ЭМГ-сигнал имеет шумовой характер с широким спектром, и электромиограмма содержит большое количество высокочастотных компонент, успешность формирования управляющего сигнала для реализации механотренажером 8 процедуры реабилитации во многом определяется степенью достоверности расшифровки ЭМГ-сигналов (биопотенциалов) мышцы при планируемом движении. В связи с этим анализ зарегистрированных и преобразованных в цифровые фонового, максимального и управляющего электромиографических сигналов осуществляют путем вейвлет-преобразования с получением вейвлет-спектрограмм, характеризующих распределение амплитуд указанных электромиографических сигналовпо частотам на временных интервалах не более 0,2 сек, в диапазоне частот от 10 до 2000 ГЦ, с помощью программного модуля 6, выполненного в виде программируемой логической интегральной схемы, выполненной с возможностью осуществления вейвлет-преобразования на основе вейвлет-функции Морле.
В ходе сеанса осуществляется вейвлет-преобразование цифрового сигнала в вейвлет-спектрограмму, характеризующую распределение амплитуд фонового электромиографического сигнала напряженной мышцы/группы мышц по частотам в диапазоне от 10 до 2000 ГЦ. Таким образом, вейвлет-преобразование переводит сигнал из временного представления в частотно-временное, и хорошо локализованное во времени и по частоте. Использование вейвлет-спектрограммы для определения энергии электромиографических сигналов позволило улавливать незначительный ЭМГ сигнал мышц, обрабатывать его и приводить в действие механотренажер 8.
Анализ зарегистрированных и преобразованных в цифровые фонового, максимального и управляющего электромиографических сигналов осуществляют с помощью программируемой логической интегральной схемы программного модуля 6, выполненной с возможностью вейвлет-преобразования с получением вейвлет-спектрограмм управляющего сигнала в виде ряда амплитуд: , , …, , , и определения значения интегрального показателя из соотношения:
где:
P - интегральный показатель;
- порядковый номер частоты в вейвлет-спектрограмме управляющего электромиографического сигнала при промежуточно напряженной мышце;
- количество частот в вейвлет-спектрограмме;
=1 - самая низка частота вейвлет-спектрограммы, соответствует значению частоты в 10 Гц;
=n - самая высокая частота вейвлет-спектрограммы, соответствует значению частоты в 2000 Гц;
- значение амплитуды вейлет-спектрограммы управляющего сигнала для частоты с порядковым номером f;
- значение амплитуды вейлет-спектрограммы управляющего сигнала для частоты с порядковым номером 1;
- значение амплитуды вейлет-спектрограммы управляющего сигнала для частоты с порядковым номером n;
- значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером ;
- значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером 1;
- значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером n;
- значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером f;
- значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером 1;
- значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером n.
Если на поверхность кожи пациентов установлены дополнительные группы электродов (не изображено) поверх группы мышц, принимающих вспомогательное участие в движении реабилитируемой конечности одновременно с восстанавливаемой мышцей, то определение показателя Р производится с вычитанием после преобразования сигнала в цифровую форму из регистрируемых электромиографических сигналов электродов восстанавливаемой мышцы сигналов дополнительных групп электродов для исключения влияния электромиографического сигнала группы мышц, принимающих вспомогательное участие в движении реабилитируемой конечности, при вычислении интегрального показателя восстанавливаемой мышцы.
Как правило, в начале сеанса производится определения текущих характеристик реабилитируемых групп мышц и суставов, далее производится проприоцепционное управление принудительным движением в суставе с помощью механотренажера 8. В ходе сеанса измеряется электромиографический сигнал на поверхности конечности при ненапряженной восстанавливаемой мышце или группе мышц для сгибания/разгибания конечностей и при напряженной мышце или группе мышц для сгибания/разгибания конечностей, усиления и преобразования аналогового сигнала в цифровой, и формирования для механотренажера 8 управляющих команд начала, остановки или изменения скорости движения конечности пациента,
Причем фоновый и максимальный электромиографические сигналы регистрируются перед началом сеанса, причем регистрация фонового электромиографического сигнала осуществляется при полном расслаблении восстанавливаемой мышцы реабилитируемой конечности, а регистрация максимального электромиографического сигнала осуществляется при максимальном напряжении восстанавливаемой мышцы реабилитируемой конечности пациентом, после чего пациент производит в ходе сеанса циклическое напряжение и расслабление восстанавливаемой мышцы реабилитируемой конечности, при которых каждый из зарегистрированных управляющих электромиографических сигналов преобразуется в вейвлет-спектрограмму с получением указанного выше интегрального показателя Р, соответствующего состоянию напряжения восстанавливаемой мышцы реабилитируемой конечности в каждый момент измерения, в соответствии с которым программный модуль 6 формирует в реальном времени последовательность коррелированных с мышечным усилием пациента сигналов для управления двигателем механотренажера 8.
В ходе реабилитационного сеанса пациент производит циклическое напряжение и расслабление восстанавливаемой мышцы/группы мышц реабилитируемой конечности, а управляемое блоком 6 обработки (программный модуль 6) механическое устройство (механотренажер 8), расположенное под конечностью, помогает совершить желаемое движение, компенсируя при этом недостающую силу. При этом ЭМГ-сигнал электродов 2,3,4 и блока 6 (программный модуль 6) содержит последовательность коротких импульсов, представляющих собой отклики мышц на периодическую стимуляцию.
Измеренные (зарегистрированные) значения напряжения электромиографического сигнала пациента анализируют посредством искусственного интеллекта, осуществляющего классификацию преобразованного электромиографического сигнала с помощью искусственной нейронной сети, предварительно обученной путем контроля нормального уровня показателя, определяемого измеренными значениями напряжения электромиографического сигнала, посредством предварительной серии сеансов, осуществляемых механотренажером 8 под управлением программируемой логической интегральной схемы программного модуля 6 для получения следующих характеристик реабилитируемой конечности:
- объем движения в суставах
- мощность мышц
- силу мышц
- выносливость мышц
- скорость сокращения мышц;
позволяющих врачу оценивать эффект, оказываемый на реабилитируемую конечность при проведении сеанса и, в соответствии с оценкой задавать длительность, интенсивность и количество последующих сеансов, необходимых для восстановления реабилитируемой конечности.
Указанные выше характеристики реабилитируемой конечности анализируют посредством искусственного интеллекта, осуществляющего классификацию характеристик реабилитируемой конечности с помощью искусственной нейронной сети, предварительно обученной путем контроля нормального уровня показателя, определяемого измеренными значениями характеристик реабилитируемой конечности, посредством серии сеансов, осуществляемых механотренажером 8 под управлением программируемой логической интегральной схемы блока 6 (программный модуль 6) для получения длительности, интенсивности и количества сеансов необходимых для восстановления реабилитируемой конечности.
Соответствие мощности регистрируемого электромиографического сигнала (ЭМГ-сигнала) и уровня физиологического напряжения мышцы позволяет в результате вейвлет-преобразования значения мощности ЭМГ-сигнала получать однозначное значение напряжения анализируемой мышцы в текущий момент времени.
Блок 6 обработки (программный модуль 6) преобразует текущие аспекты спектра электромиографического сигнала в выходной сигнал, служащий для управления двигателем механотренажера, воздействующим на соответствующую мышцу
На основании текущих и целевых значений характеристик, а также значений их роста определяется требуемая частота и интенсивность сеансов реабилитации (курс) для закрепления кратковременного роста и достижения целевых характеристик.
Для того, чтобы в ходе сеанса управляемое блоком 6 обработки (программный модуль 6) механическое устройство (механотренажер 8), расположенное под конечностью, согласовано помогало совершить желаемое движение, компенсируя при этом недостающую мышечную силу, блок 6 обработки (программный модуль 6), обладающий искусственным интеллектом (ИИ) эвристически решает задачи анализа ЭМГ-сигнала и его классификации на основе своей искусственной нейронной сети для управления воздействием механического устройства (механотренажера 8) на реабилитируемую конечность.
Достижение технического результата основано на том, что при реализации заявляемого способа, на стадии афферентного синтеза в ходе сеанса происходит интенсивное взаимодействие мотивационных возбуждений пациента с возбуждениями, обусловленными действием на организм внешнего механического устройства (механотренажер 8) и соответствующем пусковом раздражении. Это взаимодействие строится на основе доминантных взаимоотношений. В каждом конкретном случае может доминировать либо возбуждение, сформированное на основе внутренней потребности организма, либо обусловленное воздействием на организм внешних раздражителей. Каждое из этих возбуждений в построении целенаправленной деятельности использует механизм генетической и индивидуальной памяти. Стадия афферентного синтеза завершается принятием решения - оперативным выбором искусственным интеллектом одной определенной формы периферийного поведения.
После завершения сеанса интерфейсом 9 отображается статистика по изменению целевых характеристик после каждого сеанса, а так же предлагаемая нагрузка для следующего сеанса и рекомендуемое количество сеансов.
ИИ может сам формировать курс реабилитации на основании анализа изменения данных характеристик, для этого он обучается на примерах других пациентов, которым курс формировал врач и известна динамика улучшения характеристик мышц в зависимости от числа сеансов, их длительности и интенсивности. Программный модуль 6 анализирует и выдает оптимально выстроенный курс реабилитации, врачу достаточно проверить ключевые параметры, оценить и согласиться или оказаться от предложенного варианта.
При реализации способа реабилитация обусловлена афференцией - возникновением афферентного потока, являющегося главным фактором восстановления двигательных функций, при активации пациентом мышечных и сухожильных рецепторов при попытке сделать движение. Афференция поддерживает постоянный уровень возбуждения мотонейронов и интернейронной сети, от которой зависит реализация сегментарных рефлексов и работа эффекторного аппарата. Активируемые афферентным потоком супраспинальные структуры мозга начинают постепенно формировать новую структуру связей и восстанавливать двигательные координации. При этом структура афферентного потока, его пространственно-временной паттерн, должен максимально приближаться к нормальному. Если движение порождает афферентный поток с выраженными патологическими свойствами, то формируемая на его основе система двигательных координаций будет иметь патологические проявления, поэтому полноценная двигательная реабилитация возможна, если тренируемые в сеансе механотерапии движения будут максимально синхронизированы с собственными управляющими нервными импульсами пациента.
В процессе реализации способа организм пациента активно управляет в реальном времени процедурой с помощью блока 6 обработки (программный модуль 6), функционирующего в соответствии с концепцией «искусственного нейрона» - математической функции, которая преобразует несколько входных фактов в один выходной, назначая для них веса влияния, для управления механотренажером 8 с помощью собственных мышечных импульсов пациента (электромиографического сигнала = биоэлектрических потенциалов), которые улавливаются с помощью электродов (сенсоров) 2,3,4 с поверхности кожи (по месту расположения реабилитируемой мышцы) по принципу поверхностной электромиографией. Даже самые минимальные импульсы ЭМГ дают возможность блоку 6 обработки (программный модуль 6) оценить и формировать управляющий сигнал для механического устройства - механотренажера, а последнему практически без запаздывания адекватно принудительно реализовать движение, которое пытается инициировать пациент.
Для определения характеристик движения реабилитируемой конечности метод искусственных нейронных сетей является оптимальным благодаря малому времени обучения. Повышению точности определения типа движения способствует обработка сигнала с использованием вейвлет-преобразования, за счет которого можно избавиться от низкочастотных шумов, вызванных изменением потенциала на референте, побочным влиянием сигналов, обусловленных электрической активностью сердца и с высокой точностью определить распределение энергии ЭМГ сигнала по частотам в текущий момент времени
Благодаря этому обеспечена возможность при реализации способа с высокой степенью достоверности интерпретировать внешние данные, извлекать уроки из поступающей информации и использовать ее в целях оптимизации принудительного движения за счет гибкой адаптации воздействия механического устройства (механотренажера 8). Процесс адаптации искусственной нейронной сети состоит в автоматическом изменении алгоритма функционирования по мере накопления и обобщения имеющейся многопараметрической исходной базы данных и опыта с целью формирования управляющих сигналов для механотренажера 8 с обеспечением проведения сеансов в оптимальной последовательности и с оптимальной нагрузкой и индивидуального разрешения вновь возникающих задач реабилитации.
Учитывая большой объем исходной афферентации, использованной в стадии афферентного синтеза, и ограниченное количество возможных афферентных возбуждений, согласно настоящему способу сознание пациента не участвует в принятии управляющих решений блока обработки. (программный модуль 6).
Непосредственно после принятия решения с помощью механотренажера 8 реализуется поток эфферентных возбуждений, который обеспечивает соответствующее оптимальное периферическое действие, способствующее реализации желаемого движения. (Афферентные потоки представляют собой информацию, поступающую в мозг от рецепторов, а эфферентные системы - информацию, идущую от мозга к эффекторам (мышцы, железы).
Таким образом, пациент осуществляет только осознанные мотивационные возбуждения для осуществления движения реабилитируемой конечности, а мозг получает позитивную (положительную) биологическую обратную связь от реабилитируемых конечностей о том, что желаемое движение (доминирующая потребность) было выполнено успешно. Целенаправленный поведенческий акт, инициированный мотивационным возбуждением, заканчивается полезным приспособительным результатом, удовлетворяющим доминирующую потребность.
В результате многократного целенаправленного повторения движений с изложенной выше процедурой афферентных возбуждений, запускается, реализуется и сохраняется процесс нейропластичности, лежащей в основе восстановления нарушенной двигательной функции - обусловленный свойством человеческого мозга, заключающимся в возможности изменяться под действием опыта, а также восстанавливать утраченные связи после повреждения или в качестве ответа на внешние воздействия, в данном случае, воздействие механотренажера 8.
На данный момент предложенный способ целесообразнее всего применять при следующих диагнозах:
• Миелопатия/повреждение спинного мозга (давность события не имеет значения)
• Инсульт
• Черепно-мозговая травма
• Мышечная дистрофия
Предложенный способ может использоваться как монотерапия, также может комбинироваться с другими физиотерапевтическими и реабилитационными процедурами, в том числе электростимуляцией мышц и использованием дополненной или виртуальной реальности.
Процесс проведения сеансов может контролироваться как непосредственно, так и удаленно, специально обученным физиотерапевтом, который индивидуально настраивает необходимый режим занятия для каждой реабилитируемой конечности с целью воссоздания силового напряжения мышц конечности. В объеме настоящего способа фильтрация исходного ЭМГ-сигнала от шумов по частоте с помощью вейвлет-преобразования, а также последующая достоверная расшифровка и классификация подвергнутого указанной фильтрации ЭМГ-сигнала с помощью искусственной нейронной сети, позволили повысить точность распознавания и воспроизведения движений до 95%. В результате регулярного применения у пациентов восстанавливается мышечная активность, увеличивается скорость реакции, а также мышечная масса, уменьшается спастика и уровень нейропатических болей. Тем самым удается обеспечить окончательное выздоровление и успешное возвращение пациентов к обычному образу жизни в кратчайшие сроки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| Способ восстановления двигательной активности верхней и нижней конечностей человека | 2017 |
|
RU2644295C1 |
| Устройство управления нейрореабилитационным тренажером верхней конечности человека | 2017 |
|
RU2644294C1 |
| Физиотерапевтический комплекс для стимулирования кровообращения сердечно-сосудистой системы | 2024 |
|
RU2830990C1 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ ДИАГНОСТИКИ ЭССЕНЦИАЛЬНОГО ТРЕМОРА И РАННЕЙ И ПЕРВОЙ СТАДИЙ БОЛЕЗНИ ПАРКИНСОНА С ПОМОЩЬЮ АНАЛИЗА ВСПЛЕСКООБРАЗНОЙ АКТИВНОСТИ МЫШЦ | 2020 |
|
RU2741233C1 |
| Способ комплексной оценки функции верхних конечностей | 2019 |
|
RU2725055C1 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ ДИАГНОСТИКИ ЭССЕНЦИАЛЬНОГО ТРЕМОРА И ПЕРВОЙ СТАДИИ БОЛЕЗНИ ПАРКИНСОНА С ПОМОЩЬЮ АНАЛИЗА ВСПЛЕСКОВ НА КРОСС-ВЕЙВЛЕТ СПЕКТРЕ ЭЛЕКТРОМИОГРАФИЧЕСКИХ СИГНАЛОВ МЫШЦ-АНТАГОНИСТОВ | 2022 |
|
RU2797878C1 |
| СПОСОБ ЛЕЧЕНИЯ ДЕТЕЙ С НЕЙРОМОТОРНЫМИ НАРУШЕНИЯМИ МЕТОДОМ БИОЛОГИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ | 1996 |
|
RU2148946C1 |
| Способ восстановления двигательной функции кисти | 1989 |
|
SU1703132A1 |
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2017 |
|
RU2673151C1 |
Изобретение относится к медицине, а именно к восстановлению двигательной функции конечности. Предложен способ, предусматривающий фиксацию реабилитируемой конечности в реабилитационном механотренажере, выполненном с возможностью осуществления циклического сгибания и разгибания конечности пациента, для чего в ходе сеанса с помощью электродов, установленных на поверхности кожи поверх приводящей в движение конечность восстанавливаемой мышцы, осуществляют регистрацию электромиографических сигналов с последующим формированием программным модулем сигналов управления, передаваемых двигателю механотренажера на принудительное движение, компенсирующее недостающую силу реабилитируемой конечности. Причем регистрируют максимальный, фоновый и управляющий электромиографические сигналы при максимально напряженной, ненапряженной и промежуточно напряженной в ходе сеанса мышце, поступающие в программный модуль, и осуществляет формирование сигналов управления, передаваемых двигателю механотренажера, в соответствии со значением показателя, определяемого на основании соотношения зарегистрированных электромиографических сигналов. Анализ электромиографических сигналов осуществляют с получением вейвлет-спектрограмм, характеризующих распределение амплитуд указанных сигналов по частотам на временных интервалах не более 0,2 сек, в диапазоне частот от 10 до 2000 ГЦ, и определяют значение интегрального показателя Р, определяемого на основании соотношения электромиографических сигналов, для чего производят вычитание значения каждой из амплитуд вейвлет-спектрограммы фонового сигнала из соответствующей по частоте амплитуды максимального и управляющего сигналов, деление значения разностей амплитуд управляющего и фонового сигнала на соответствующую по частоте разницу амплитуд максимального и фонового сигнала, а также суммирование отношений указанных разностей амплитуд с получением значения интегрального показателя Р, в соответствии с которым программный модуль 6 формирует в реальном времени сигналы, коррелированные с мышечным усилием пациента. Изобретение обеспечивает восстановление мышечной активности, увеличение скорости реакции, а также мышечной массы пациентов, уменьшение спастики и уровня нейропатических болей. 12 з.п. ф-лы, 9 ил.
1. Способ восстановления двигательной функции конечности, предусматривающий фиксацию реабилитируемой конечности пациента в реабилитационном механотренажере, выполненном с возможностью осуществления циклического сгибания и разгибания реабилитируемой конечности пациента, для чего в ходе сеанса с помощью электродов, установленных на поверхности кожи поверх приводящей в движение реабилитируемую конечность восстанавливаемой мышцы, осуществляют регистрацию электромиографических сигналов с последующим формированием программным модулем сигналов управления, передаваемых двигателю механотренажера на принудительное движение, компенсирующее недостающую силу реабилитируемой конечности, причем регистрируют максимальный, фоновый и управляющий электромиографические сигналы при максимально напряженной, ненапряженной и промежуточно напряженной в ходе сеанса мышце, соответственно, поступающие в программный модуль для преобразования зарегистрированных сигналов в цифровые, анализа и обработки в выбранной полосе частот и осуществляет формирование сигналов управления, передаваемых двигателю механотренажера, в соответствии со значением показателя, определяемого на основании соотношения зарегистрированных электромиографических сигналов, отличающийся тем, что анализ зарегистрированных и преобразованных в цифровые фонового, максимального и управляющего электромиографических сигналов осуществляют путем вейвлет-преобразования с получением вейвлет-спектрограмм, характеризующих распределение амплитуд указанных электромиографических сигналов по частотам на временных интервалах не более 0,2 сек, в диапазоне частот от 10 до 2000 ГЦ, а в качестве значения показателя определяют значение интегрального показателя, определяемого на основании соотношения указанных зарегистрированных электромиографических сигналов, для чего производят вычитание значения каждой из амплитуд вейвлет-спектрограммы фонового сигнала из соответствующей по частоте амплитуды максимального и управляющего сигналов, деление значения разностей амплитуд управляющего и фонового сигнала на соответствующую по частоте разницу амплитуд максимального и фонового сигнала, а также суммирование отношений указанных разностей амплитуд, с получением в результате суммирования значения интегрального показателя, в соответствии с которым программный модуль формирует в реальном времени сигналы, коррелированные с мышечным усилием пациента.
2. Способ по п. 1, отличающийся тем, что анализ зарегистрированных и преобразованных в цифровые фонового, максимального и управляющего электромиографических сигналов осуществляют путем вейвлет-преобразования с получением вейвлет-спектрограмм, характеризующих распределение амплитуд указанных электромиографических сигналов по частотам на временных интервалах не более 0,2 сек, в диапазоне частот от 10 до 2000 ГЦ, с помощью программного модуля, выполненного в виде программируемой логической интегральной схемы, выполненной с возможностью осуществления вейвлет-преобразования на основе вейвлет-функции Морле.
3. Способ по п. 2, отличающийся тем, что анализ зарегистрированных и преобразованных в цифровые фонового, максимального и управляющего электромиографических сигналов осуществляют с помощью программируемой логической интегральной схемы, выполненной с возможностью вейвлет-преобразования с получением вейвлет-спектрограмм управляющего сигнала в виде ряда амплитуд:  ,
,  , …,
, …,  ,
,  , и определения значения интегрального показателя из соотношения:
, и определения значения интегрального показателя из соотношения:
где:
P – интегральный показатель;
 – порядковый номер частоты в вейвлет-спектрограмме управляющего электромиографического сигнала при промежуточно напряженной мышце;
– порядковый номер частоты в вейвлет-спектрограмме управляющего электромиографического сигнала при промежуточно напряженной мышце;
 – количество частот в вейвлет-спектрограмме;
– количество частот в вейвлет-спектрограмме;
=1 – самая низкая частота вейвлет-спектрограммы, соответствует значению частоты в 10 Гц;
=n - самая высокая частота вейвлет-спектрограммы, соответствует значению частоты в 2000 Гц;
 – значение амплитуды вейлет-спектрограммы управляющего сигнала для частоты с порядковым номером f;
– значение амплитуды вейлет-спектрограммы управляющего сигнала для частоты с порядковым номером f;
– значение амплитуды вейлет-спектрограммы управляющего сигнала для частоты с порядковым номером 1;
– значение амплитуды вейлет-спектрограммы управляющего сигнала для частоты с порядковым номером n;
 – значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером f;
– значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером f;
 – значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером 1;
– значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером 1;
 – значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером n;
– значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером n;
 – значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером f;
– значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером f;
 – значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером 1;
– значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером 1;
 – значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером n.
– значение амплитуды вейлет-спектрограммы фонового сигнала для частоты с порядковым номером n.
4. Способ по любому из пп. 1-3, отличающийся тем, что фоновый и максимальный электромиографические сигналы регистрируются перед началом сеанса, причем регистрация фонового электромиографического сигнала осуществляется при полном расслаблении восстанавливаемой мышцы реабилитируемой конечности, а регистрация максимального электромиографического сигнала осуществляется при максимальном напряжении восстанавливаемой мышцы реабилитируемой конечности пациентом, после чего пациент производит в ходе сеанса циклическое напряжение и расслабление восстанавливаемой мышцы реабилитируемой конечности, при которых каждый из зарегистрированных управляющих электромиографических сигналов преобразуется в вейвлет-спектрограмму с получением указанного выше интегрального показателя, соответствующего состоянию напряжения восстанавливаемой мышцы реабилитируемой конечности в каждый момент измерения, в соответствии с которым программный модуль формирует в реальном времени последовательность коррелированных с мышечным усилием пациента сигналов для управления двигателем механотренажера.
5. Способ по любому из пп. 1-3, отличающийся тем, что регистрация значений напряжения электромиографического сигнала пациента производится с помощью группы из трех электродов, устанавливаемых на поверхности кожи поверх восстанавливаемой мышцы пациента, приводящей в движение реабилитируемую конечность, причем центральный электрод крепится поверх восстанавливаемой мышцы, а два крайних электрода располагаются на равном расстоянии по обе стороны от центрального электрода.
6. Способ по п. 5, отличающийся тем, что на поверхность кожи пациентов устанавливаются дополнительные группы электродов поверх группы мышц, принимающих вспомогательное участие в движении реабилитируемой конечности одновременно с восстанавливаемой мышцей, с последующим вычитанием после преобразования сигнала в цифровую форму из регистрируемых электромиографических сигналов электродов восстанавливаемой мышцы сигналов дополнительных групп электродов для исключения влияния электромиографического сигнала группы мышц, принимающих вспомогательное участие в движении реабилитируемой конечности, при вычислении интегрального показателя восстанавливаемой мышцы.
7. Способ по любому из пп. 1-3, отличающийся тем, что при реализации способа пациент располагается лежа или в полусидячем положении, при этом реабилитируемая конечность фиксируется на реабилитационном механотренажере.
8. Способ по любому их пп. 1, 7, отличающийся тем, что реабилитационный механотренажер располагается на регулируемой платформе, выполненной с возможностью адаптации положения механотренажера для проведении сеанса реабилитации пациента с полным отсутствием двигательной функции в условиях постельного режима.
9. Способ по п. 4, отличающийся тем, что разметку для установки электродов, нанесенную при первом сеансе, сохраняют при очередных сеансах на протяжении всего курса реабилитации.
10. Способ по любому из пп. 1, 6, отличающийся тем, что электроды устанавливаются с помощью эластичной манжеты, выполненной с возможностью позиционирования электродов на реабилитируемой конечности с учетом анатомического строения пациента, а также с возможностью удержания электродов на реабилитируемой конечности на протяжении всего сеанса.
11. Способ по любому из пп. 1-3, отличающийся тем, что измеренные значения напряжения электромиографического сигнала пациента анализируют посредством искусственного интеллекта, осуществляющего классификацию преобразованного электромиографического сигнала с помощью искусственной нейронной сети программного модуля, предварительно обученной путем контроля нормального уровня показателя, определяемого измеренными значениями напряжения электромиографического сигнала, посредством предварительной серии сеансов, осуществляемых механотренажером для получения следующих характеристик реабилитируемой конечности:
- объем движения в суставах
- мощность мышц
- силу мышц
- выносливость мышц
- скорость сокращения мышц;
позволяющих врачу оценивать эффект, оказываемый на реабилитируемую конечность при проведении сеанса, и в соответствии с оценкой задавать длительность, интенсивность и количество последующих сеансов, необходимых для восстановления реабилитируемой конечности.
12. Способ по любому из пп. 1-3, 9, отличающийся тем, что указанные выше характеристики реабилитируемой конечности анализируют посредством искусственного интеллекта, осуществляющего классификацию характеристик реабилитируемой конечности с помощью искусственной нейронной сети программного модуля, предварительно обученной путем контроля нормального уровня показателя, определяемого измеренными значениями характеристик реабилитируемой конечности, посредством серии сеансов, осуществляемых механотренажером под управлением программного модуля для получения длительности, интенсивности и количества сеансов, необходимых для восстановления реабилитируемой конечности.
13. Способ по п. 12, отличающийся тем, что анализ и обработка регистрируемых электромиографических сигналов осуществляются в программном модуле в составе реабилитационного механотренажера или в составе удаленного сервера, куда передается информация о зарегистрированных значениях электромиографического сигнала для анализа и обработки с помощью искусственной нейронной сети.
| Способ восстановления двигательной активности верхней и нижней конечностей человека | 2017 |
|
RU2644295C1 |
| СПОСОБ РЕАБИЛИТАЦИИ ПРИ ТОТАЛЬНОМ ЭНДОПРОТЕЗИРОВАНИИ КОЛЕННОГО СУСТАВА В ДО- И ПОСЛЕОПЕРАЦИОННЫХ ПЕРИОДАХ | 2013 |
|
RU2538133C2 |
| СПОСОБ РЕАБИЛИТАЦИИ БОЛЬНЫХ, ПЕРЕНЕСШИХ ИНСУЛЬТ | 2013 |
|
RU2523349C1 |
| СПОСОБ РЕАБИЛИТАЦИИ БОЛЬНЫХ С КОНТРАКТУРАМИ КОЛЕННОГО СУСТАВА | 2007 |
|
RU2338503C1 |

