Изобретение относится к области медицины и медицинской техники, более точно к диагностике и может служить для оценки гипертрофии и атрофии скелетных мышц, измерения мышечного объема.
Известно, что заболевания опорно-двигательного аппарата, приводящие к воспалению, гипертрофии и атрофии мышц сопровождаются изменением объема вышечного волокна и всей мышцы. Измерение толщины скелетных мышц также позволяет оценить степень адаптации в ответ на физические нагрузки в спорте или при реабилитации [Han, P., Chen, Y., Ао, L. et al. Automatic thickness estimation for skeletal muscle in ultrasonography: evaluation of two enhancement methods. BioMed Eng OnLine 12,6(2013)].
Гипертрофия скелетных мышц - процесс увеличения объема и массы скелетной мышцы, увеличение суммарной площади поперечного сечения мышечных волокон, сопровождающееся увеличением мышечной силы. Уменьшение объема или массы мышцы называется атрофией.
Различают кратковременную и долговременную гипертрофию. Кратковременная гипертрофия обусловлена наполнением кровью капилляров, окружающих мышечные волокна, и увеличением их количества. Долговременная гипертрофия подразделяется на миофибриллярную (связана с увеличением объема миофибрилл) и саркоплазматическую (связана с увеличением объема саркоплазмы) [Самсонова, Алла Владимировна. Гипертрофия скелетных мышц человека [Текст]: учебное пособие].
Известен способ оценки площади поперечного сечения мышцы с помощью компьютерной томографии (RU №2108768, 2007 г.; RU №2309678, 2007 г.), заключающийся в измерении толщины и поперечника мышцы по мультипланарным реконструкциям мышечных срезов. Однако известный способ является дорогостоящим, а процедура занимает много времени, что делает их непригодными для использования в научно-исследовательских и реабилитационных целях с вовлечением большого числа пациентов.
Известен «Способ измерения мышечного поперечника и толщины кожно-жирового слоя у спортсменов» (Р.Н.Волховских и др., «Методика ультразвуковой эхолокации мышечного поперечника и толщины кожно-жирового слоя у спортсменов», ж.«Теория и практика физической культуры, 1972 г., №12, с. 66-68), основанный на использовании B-mode ультразвукового исследования (УЗИ) для измерения мышечного объема.
Данный способ выбран в качестве прототипа изобретения.
В данном способе для измерения мышечного поперечника и толщины кожно-жирового слоя используется технический ультразвуковой аппарат. Датчик, производящий ультразвуковые колебания, устанавливался на поверхности кожи над областью интересов. Конечность (рука) испытуемого располагалась в специальной установке, которая позволяла фиксировать координаты положения датчика и проводить повторные измерения в одном и том же месте конечности. Для этого использовалась вертикальная стойка, на которую были нанесены деления, которые указывали местонахождение по высоте перемещающейся горизонтальной рейки (которая позволяла находить положение датчика по горизонтали) с закрепленным на ней датчиком. Также для постоянства направления УЗ луча при повторных измерениях в головку датчика был вмонтирован угломер.
Достоинством известного способа является его относительная простота и дешевизна. Метод позволяет получать информацию об изменениях площади поперечного сечения мышцы, но исключает возможность изучить плотностные структурные характеристики мышц, также данный способ характеризуется субъективностью визуальной оценки и отсутствием количественных критериев такого анализа (Неотложная ультразвуковая диагностика в практике военного врача. //Под ред. М. Черемисина /ВМедА/ СПб, 1996, 133 с.).
Для преодоления недостатка, связанного с невозможностью получения информации об микроскопических изменениях в составе и структуре мышц, предпочтительно добавить к УЗИ-сигналу сигнал электрического импеданса, что позволит повысить информативность диагностического метода путем оценки электрических свойств тканей области измерения [Miyatani, М., Kanehisa, Н., & Fukimaga, Т. (2000). Validity of bioelectrical impedance and ultrasonographic methods for estimating the muscle volume of the upper arm. European Journal of Applied Physiology, 82(5-6), 391-396; Rutkove, S.В., Gregas, M.C, & Darras, В. T. (2012). Electrical impedance myography in spinal muscular atrophy: A longitudinal study. Muscle & Nerve, 45(5), 642-647].
Электроимпедансная миография - это неинвазивный метод определения нейромышечной активности, заключающийся в пропускании зондирующего тока высокой частоты между токовыми электродами и регистрации возникающей разности потенциалов на измерительных электродах. В большинстве приложений используется тетраполярная методика измерений, чтобы минимизировать поляризацию электродов, таким образом, поддерживая качество сигнала [Sanchez В., Rutkove S.B. Electrical Impedance Myography and Its Applications in Neuromuscular Disorders//Neurotherapeutics. Neurotherapeutics. 2017. T. 14, №1. C. 107-118. doi: 10.1007/sl3311-016-0491-x].
Другой недостаток данного способа заключается в невозможности выявления гипертрофии на ранних стадиях, так как при гипертрофии помимо изменений в архитектуре и толщине скелетных мышц, также происходят изменения в нервном аппарате (происходят адаптационные реакции не только мышечной, но и нервной систем): улучшение иннервации мышц, повышение возбудимости нервномышечного аппарата, возрастание скорости мышечного сокращения и расслабления [Moritani Т., deVries Н.А. Neural factors versus hypertrophy in the time course of muscle strength gain. // American journal of physical medicine. 1979. №3 (58). C. 115-130; HAKKINEN K., KOMI P. Electromyographic changes during strength training and detraining // Medicine & Science in Sports & Exercise. 1983. №6 (15). С 455-460].
Для преодоления данного ограничения предпочтительно увеличить число информативных каналов, добавив к УЗИ-сигналу и сигналу электрического импеданса сигнал поверхностной электромиограммы, который может быть использован для регистрации электрической активности мышц и оценки изменения их нервной активации, что позволит обеспечить диагностику гипертрофии на ранних стадиях. [Moritani Т, deVries НА. Neural factors versus hypertrophy in the time course of muscle strength gam. Am J Phys Med 58: 115-130, 1979][Sale DG. Neural adaptation to resistance training. Med Sci Sports Exerc 20: S135-S145, 1988].
Для измерений сигнала электрического импеданса и сигнала поверхностной электромиографии возможно использование одной электродной системы с дальнейшим разделением каналов.
Следующим недостатком данного способа является высокая вероятность искажения результатов за счет неконтролируемого излишнего прижатия ультразвукового датчика к поверхности исследуемой структуры, способного повлиять на внутреннюю анатомию и геометрию сечения мышцы. [Mauris N, Beenakher Е., van Schraik G. et al. Muscle ultrasound in children: normal values and application to neuromuscular disorders // Ultrasound Med Biol, 2004; 30 (8): 107-1027; Делягин BM. Ультразвуковое исследование мышц в норме и при нейромышечной патологии // SonoAce-Ultrasound. 2015. №27].
Для преодоления данного ограничения необходимо использовать датчики силы для регистрации прижатия ультразвукового датчика к области измерения с целью контроля силы прижатия и влияния прижатия на изменение внутренней анатомии, что также позволит повысить информативность диагностического метода путем оценки реологических свойств тканей.
Для регистрации механических сигналов предпочтительно использовать датчики силы, которые располагаются в проекции брюшка мышцы, так как в результате сокращения происходит изменение (утолщение и утончение) тела мышцы в поперечном направлении, одновременно с продольным смещением брюшка мышцы, что в свою очередь будет оказывать влияние на датчики силы, по принципу, согласно которому сопротивление пьезорезисторов будет изменяться под действием приложенной силы - величина сопротивления изменяется пропорционально величине применяемой силы, в свою очередь, изменение сопротивления цепи приводит к соответствующему выходному уровню напряжения.
Для минимизации осуществляемого датчиком давления на кожу предпочтительно использовать достаточное количество высокоплотного геля, расположить датчик непосредственно над исследуемой областью, а затем перемещать датчик ближе к поверхности кожи до появления полного контакта датчика с переходным слоем геля и получения четкого оптического изображения.
Предпочтительно точное позиционирование датчика для обеспечения параллельного или поперечного его перемещения при проведении исследования.
Предпочтительно, чтобы угол инсонации (угол между продольной частью мышцы и направлением доплеровского луча) составлял 90° для обеспечения оптимального измерения эхогенности [Mayans, David et al. "Neuromuscular ultrasonography: quantifying muscle and nerve measurements." Physical medicine and rehabilitation clinics of North America vol. 23,1 (2012): 133-48, xii. doi:10.i0i6/j.pmr.2011.11.009].
Патентный и литературный поиск показали, что были предложены методы измерения гипертрофии, основанные на использовании одного или двух различных сигналов. Для преодоления существующих недостатков и ограничений, присущих различным способам оценки гипертрофии и мышечного объема следует увеличивать количество каналов и совмещать информацию от различных сигналов.
Технической задачей настоящего изобретения является получение точной информации о структуре и объеме скелетных мышц благодаря контролю силы прижатия датчиков, а также за счет увеличения числа информационных каналов.
Ожидаемым техническим результатом применения данного изобретения является повышение точности диагностики гипертрофии и атрофии скелетных мышц и обеспечение возможности ранней диагностики гипертрофии за счет комплексирования методов оценки мышечного объема, основанных на данных с УЗИ-датчика, электромиограммы (ЭМГ) и сигнале электроимпеданса (ЭИ).
В этом случае стало возможным точно позиционировать УЗИ-датчик и электродную систему относительно исследуемой области, обеспечивая контроль силы прижатия для получения качественного контакта и сигналов, минимизируя давление на кожу и влияние на изменение внутренней анатомии, поперечное сечение мышцы и мышечных волокон. Стала возможна ранняя диагностика гипертрофии/атрофии скелетных мышц за счет получения информации не только о поперечном сечении мышцы, но также о ее структуре и составе, и оценки нервной активации мышц.
Для достижения данного технического результата способ измерения гипертрофии скелетных мышц, заключается в том, что систему датчиков точно позиционируют на поверхности кожи над областью исследования в покое или при выполнении мышечных сокращений с нагрузкой с помощью стенда, включающего систему шаговых двигателей по координате X, Y и Z, которыми управляют сигналами с блока управления шаговыми двигателями с помощью команд оператора, введенных через персональный компьютер, регистрируют сигналы с измерительных электродов, ультразвукового (УЗ) датчика и датчиков силы, в результате совместного анализа сигналов электрического импеданса, электромиограммы, механомиограммы и УЗИ формируют оценку уровня гипертрофированное™ мышц путем анализа их функционального состояния, силы, жесткости, параметров мышечного объема и сопротивления мышечных структур, также регистрируют сигналы электрического импеданса с измерительных электродов, УЗ и механомиографические сигналы от датчиков силы для контроля силы прижатия измерительных датчиков к области интереса.
Поставленная задача также достигается тем, что комплекс измерения гипертрофии скелетных мышц, состоит из стенда, аппарата УЗИ и персонального компьютера (ПК), карты видеозахвата, стенд состоит из блока регистрации биосигналов, блока регистрации механических сигналов, блока управления шаговыми двигателями, оптического энкодера перемещения по оси Z, в котором имеются датчики силы для контроля силы прижатия измерительных датчиков к области интереса по оси Z и системы датчиков, включающую в себя электродную систему для регистрации электромиограммы и элетроимпеданса и линейный УЗ датчик, выходы блока регистрации биосигналов и блока регистрации механических сигналов соединены с ПК, выходы оптического энкодера перемещения по оси Z, датчиков силы по оси Z соединены со входом блока регистрации механических сигналов, выход электродной системы соединен со входом блока регистрации биосигналов, выход линейного УЗ датчика подключен к УЗИ-аппарату, выход которого соединен со входом карты видеозахвата, выход которой в свою очередь соединен с ПК, кроме того блок управления шаговыми двигателями представляет собой систему шаговых двигателей по координатам X, Y и Z.
Таким образом, реализуемом комплексе ультразвуковой датчик используется для оценки локальной толщины мышцы, выявления макроскопических архитектурных изменений, измерения угла перистости мышечных волокон, параметров, служащих для измерения гипертрофии и оценки функционального состояния мышц.
Для преодоления ограничений ультразвукового метода, связанных с локализованностью и одномерностью измерения, в реализуемом способе регистрируется сигнал ЭИ, который используется для оценки мышечной толщины и объема, а также для анализа микроскопических изменений в составе и структуре мышцы, что позволит определять тип и природу гипертрофии. Другим регистрируемым биологическим сигналом является сигнал поверхностной электромиограммы, который может быть использован для регистрации электрической активности мышц и оценки изменения их нервной активации, тем самым обеспечивая возможность диагностики гипертрофии на ранних стадиях.
В реализуемом способе для преодоления недостатка, связанного с зависимостью результатов ультразвуковых измерений от силы прижатия датчика к области исследования, используется регистрируемый датчиком силы механомиографический сигнал, позволяющий контролировать степень прижатия системы и исключить влияние на внутреннюю анатомию. Использование ММГ сигнала вместе с предлагаемым стендом, позволяющим шаговое перемещение датчиков, может служить для оценки силовых характеристик мышц, измерения жесткости мышцы в покое и в напряжении, определяемой как отношение силы прижатия к углублению датчика в биоткань.
Сущность изобретения иллюстрируется следующими графическими материалами:
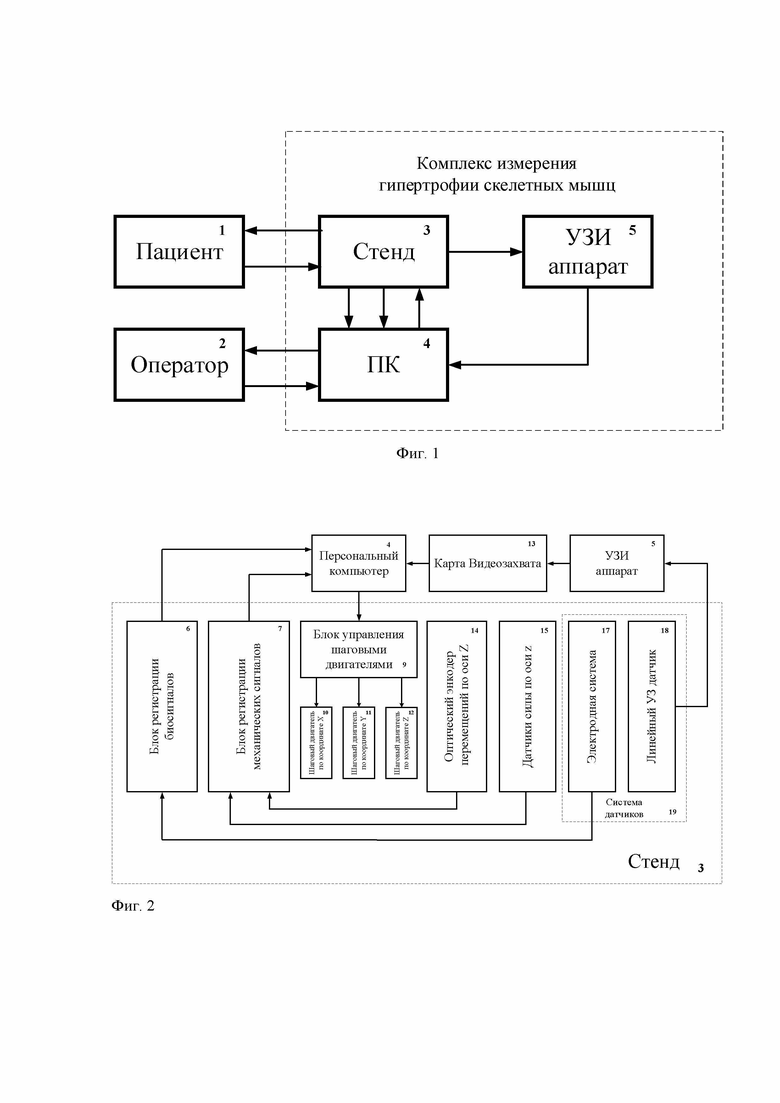
На фиг. 1 приведена обобщенная схема комплекса.
На фиг. 2 показана структурная схема комплекса измерения гипертрофии скелетных мышц.
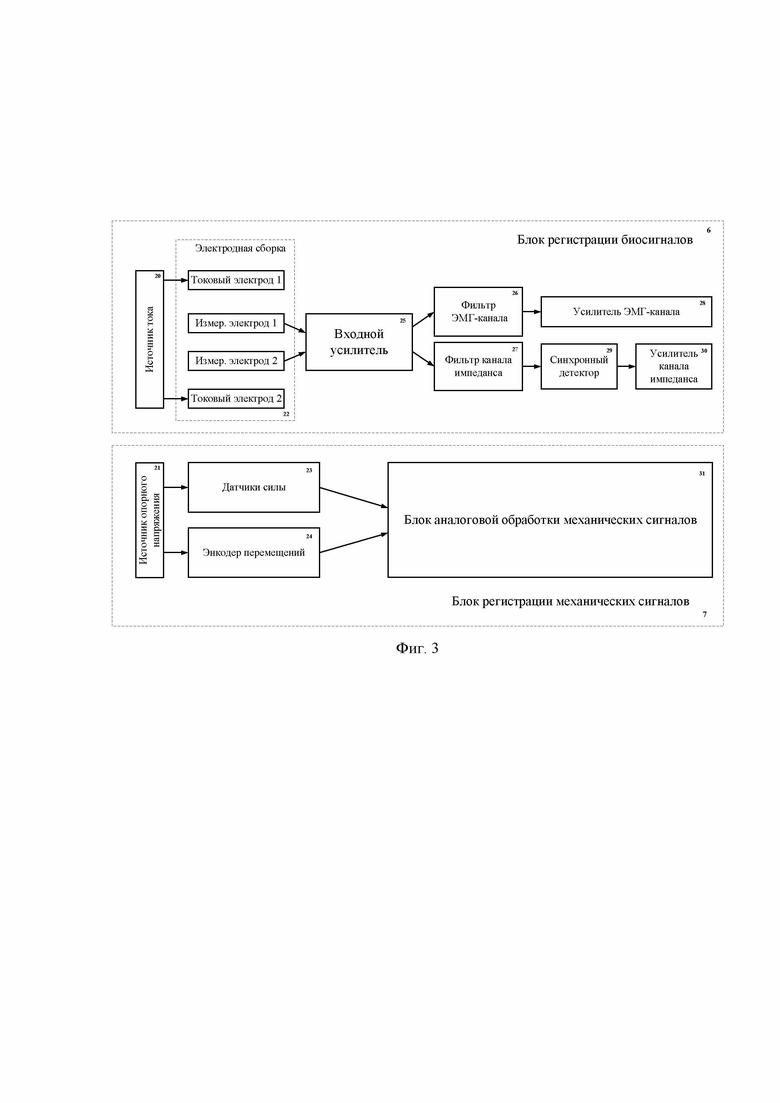
На фиг. 3 показана структурная схема блока регистрации биосигналов и блока регистрации механических сигналов.
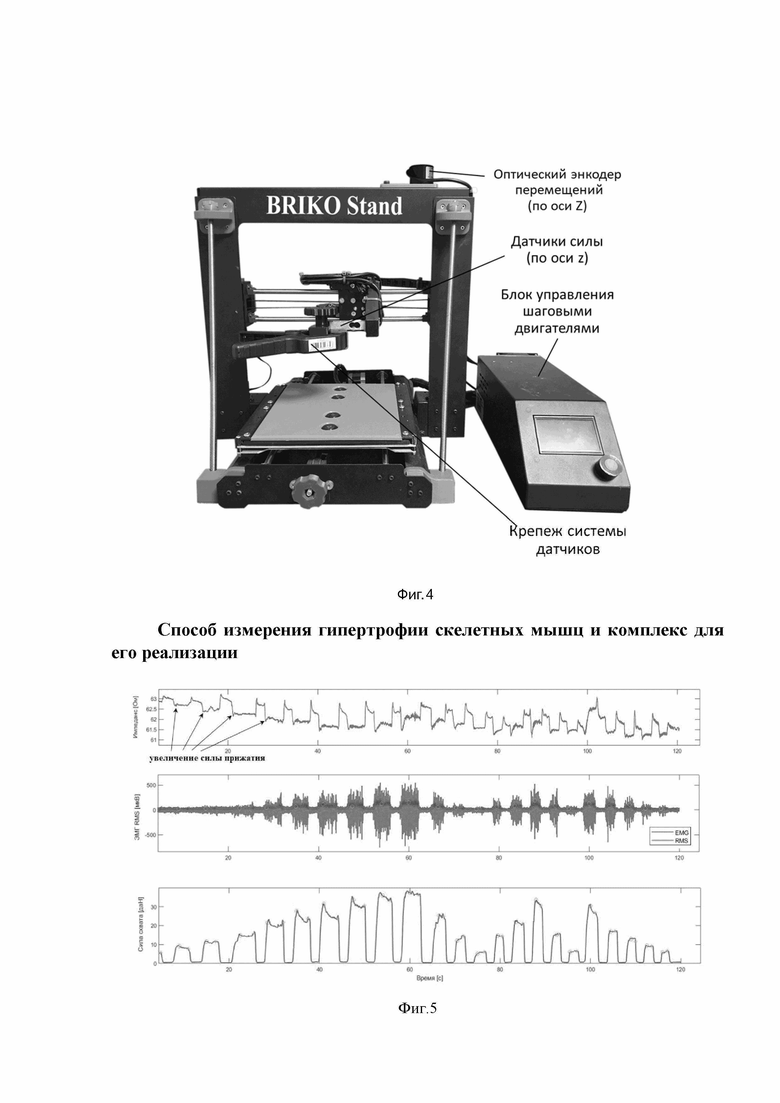
Фиг. 4. Стенд комплекса измерения гипертрофии скелетных мышц.
Фиг.5. Зависимость биосигналов при схвате/раскрытии кисти при итерационном увеличении силы прижатия электродной системы.
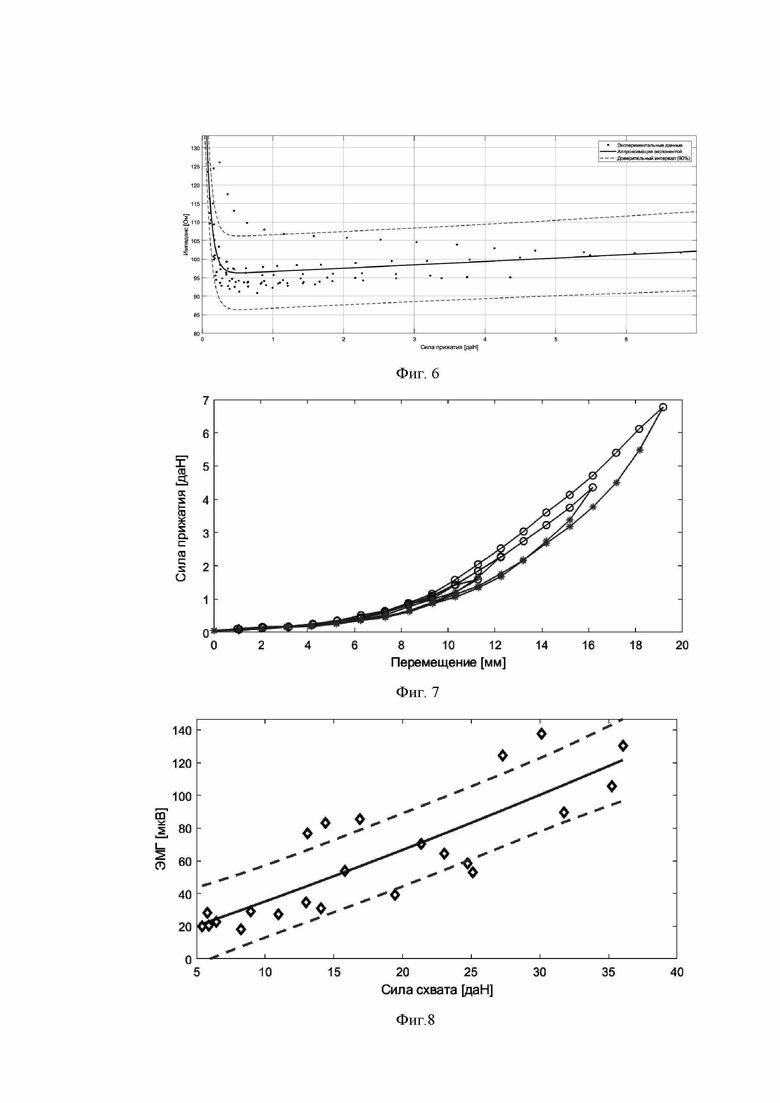
Фиг. 6. Зависимость ЭИ от силы прижатия электродной системы.
Фиг. 7. Зависимость силы прижатия системы датчиков от перемещения системы датчиков.
Фиг. 8. Зависимость ЭМГ сигнала от силы схвата кисти.
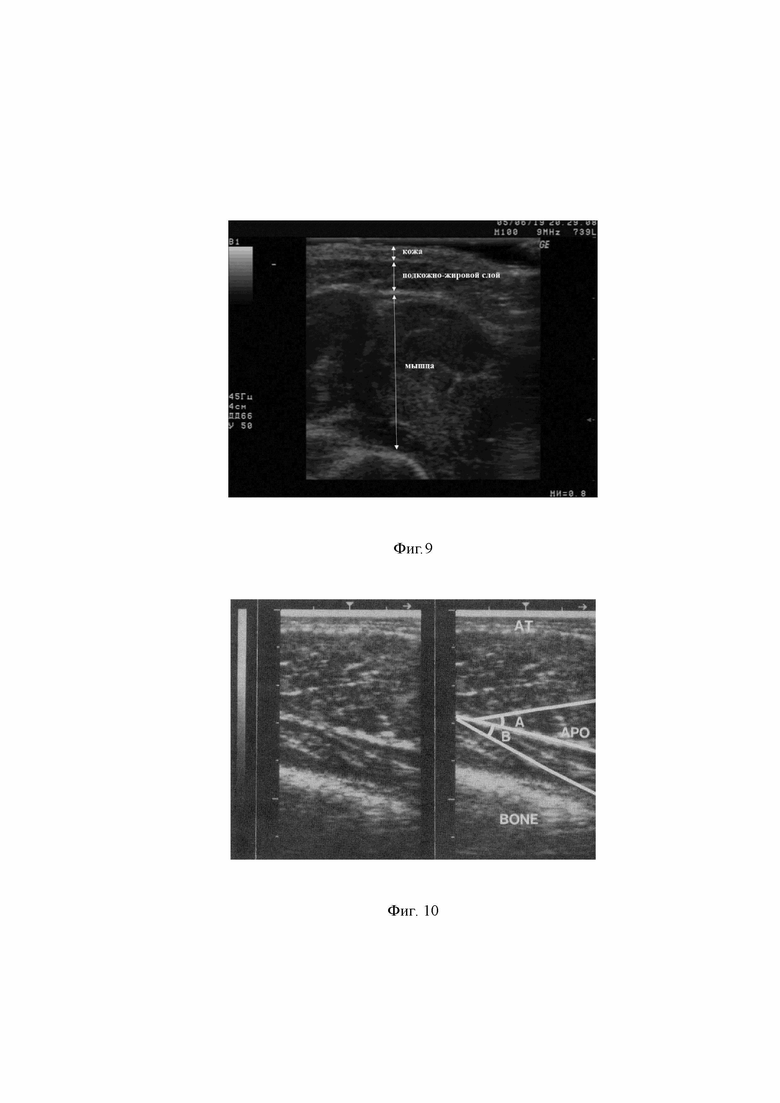
Фиг. 9. Ультразвуковое изображение измерения толщины мышцы.
Фиг. 10. Пример ультразвукового изображения для измерения угла перистости. А и В - углы перистости мышечных волокон, АРО - апоневроз (Kawakami, Y. Muscle-fiber pennation angles are greater in hypertrophied than in normal muscles/ Y. Kawakami, T. Abe, T. Fukunaga // J. Appl. Physiol. 1993.-V. 74. - N 6. - P 2740-2744).
Представленный комплекс измерения гипертрофии скелетных мышц состоит из трех принципиальных блоков (фиг. 1): Стенд 3, УЗИ-аппарат 5 и Персональный компьютер (ПК) 4.
Рассматриваемый комплекс измерения гипертрофии скелетных мышц (фиг. 2) содержит стенд, который включает в себя систему датчиков (19), включающую в себя электродную систему (17), подключенную к блоку регистрации биосигналов (6), и линейный УЗ датчик (18), выход которого подключен к УЗИ-аппарату (5), последовательно соединенного с картой видеозахвата (13), подключенной к персональному компьютеру (4). В состав рассматриваемого комплекса входят шаговые двигатели по координате X (10), Y (11) и Z (12) соответственно, вход каждого шагового двигателя по координате X (10), Y (11) и Z (12) является выходом блока управления шаговыми двигателями (9), к которому подключен персональный компьютер (4). Энкодер перемещения (14) и датчики силы по оси Z (15) являются входами блока регистрации механических сигналов (7). Выходы блока регистрации механических сигналов (7) и блока регистрации биосигналов (6) подключены к персональному компьютеру (4).
Блок регистрации биосигналов (фиг. 3) включает в себя источник тока (20), подключенный к двум токовым электродам (ТЭ1, ТЭ2). Дифференциальный сигнал с двух измерительных электродов (ИЭ1, ИЭ2) подается на входной усилитель (25). Выход входного усилителя (25) подключен к входу блока обработки сигнала ЭМГ, представленный полосно-пропускающим фильтром ЭМГ-канала (26) и масштабирующим усилителем ЭМГ-канала (28) и входу блока обработки ЭИ, представленный поло сно-пропускающим фильтром канала ЭИ (27), синхронным детекторов (29) и масштабирующим усилителем канала ЭИ (30). Сигналы с блоков обработки оцифровываются и передаются на ПК (4).
Механические сигналы стенда для контроля силы прижатия УЗИ-датчика и электродной системы к коже, а также их перемещения вдоль оси Z, записываются в блоке регистрации механических сигналов (фиг. 3), представленный двумя датчиками силы (23), расположенных на краях крепления УЗИ-датчика и электродной системы, оптическим цифровым энкодером перемещений (24), соединенный с осью шагового двигателя по координате Z (12), которые питаются источником опорного напряжения (21). Сигналы с датчиков силы и энкодера перемещений подаются на блок аналоговой обработки механических сигналов (31), выходные сигналы с которого оцифровываются и передаются на ПК (4).
Описанный выше комплекс измерения гипертрофии скелетных мышц работает следующим образом.
Конечность пациента, подлежащая обследованию, фиксируется в стенде. Для позиционирования системы датчиков (19) оператор вводит команду через персональный компьютер (4), соединенный с блоком управления шаговыми двигателями (9), в котором формируется управляющий сигнал по линейному перемещению системы датчиков, которое реализуется шаговыми двигателями по координате X (10), Y (11) и Z (12), что позволяет точно позиционировать систему датчиков (19), а также перемещать систему датчиков (19) в течении всей серии измерений.
Для реализации обратной связи по линейному перемещению и силе прижатия системы датчиков стенд содержит энкодер перемещения (14) и датчики силы по оси Z (15), выходы которых подаются на вход блока регистрации механических сигналов (7).
Система датчиков (19) включает в себя электродную систему (17) из двух токовых электродов и двух измерительных электродов и линейный УЗ датчик (18). Дифференциальный сигнал с токовых и измерительных электродов подается на вход блока регистрации биосигналов (6), выход линейного УЗ датчика подключен к УЗИ-аппарату (5), сигнал с которого распознается картой видеозахвата (13) и подается на вход персонального компьютера (4). Выходы блока регистрации биосигналов (б) и блока регистрации механических сигналов (7) соединены с персональным компьютером (4).
Пример реализации.
Для реализации рассматриваемого способа для предложенного комплекса измерения гипертрофии скелетных мышц был разработан стенд (фиг.4), позволяющий крепление, позиционирование и перемещение системой шаговых двигателей по координате X (10), Y (11) и Z (12) системы датчиков (19), которая может включать в себя, но не ограничивается, датчик УЗИ (18) и электродную систему (17) для регистрации электрофизиологических сигналов, ЭМГ и ЭИ.
Электродная система (17) и ультразвуковой датчик (18) закрепляются в крепеже системы датчиков стенда, оператор с помощью блока управления шаговыми двигателями (9) располагает систему датчиков (19) таким образом, чтобы она располагалась над конечностью добровольца, в области проекций интересующих мышц. С измерительных электродов, УЗИ-датчика (18) и датчиков силы (15) регистрируются сигналы, которые после обработки и анализа несут информацию о степени гипертрофированности, жесткости мышц и их функциональном состоянии. С датчиков силы (15) регистрируется сигнал, характеризующий силу прижатия системы датчиков (19) к области интереса.
Пример биосигналов в рамках одного исследования при расположении системы датчиков (19) в проекции мышц, участвующих в схвате, при выполнении добровольцем схвата/раскрытия кисти с различной силой схвата, зарегистрированный при итерационном увеличении силы прижатия электродной системы, представлен на фиг. 5. Для анализа сигналов (фиг. 5), несущих информацию о функциональном состоянии мышц, их силе, жесткости, а также параметров мышечного объема и сопротивления мышечных структур, требуемых для оценки степени мышечной гипертрофии, данные фиг. 5 представлены в виде отдельных зависимостей фиг. 6 - фиг. 8.
Зависимость ЭИ от силы прижатия системы датчиков в рамках данного исследования представлена на фиг.6., характеризует влияние прижатия электродной системы на сигнал ЭИ и изменение электрических параметров среды вследствие изменения внутренней анатомии и реакции тканей на давление.
Зависимость силы прижатия от перемещения системы датчиков представлена на фиг. 7, позволяет измерить жесткость мышц, которая выражается в силе реакции тканей, определяемой как отношение силы прижатия к перемещению системы датчиков (углублению датчика в биоткань). Измеренный таким образом параметр жесткости мышцы является одним из показателей функционального состояния мышц.
Пример сигнала ЭМГ в рамках одного исследования при выполнении добровольцем схвата/раскрытия кисти, в зависимости от силы схвата представлен на фиг. 8. Анализ ЭМГ сигнала (фиг. 8) позволяет оценить силу мышечного сокращения и уровень нервной активации - параметров косвенно характеризующих степень гипертрофии (атрофии).
Значение сигнала ЭИ несет информацию о мышечном объеме и удельном сопротивлении мышечных структур, изменение сигнала ЭИ при выполнении действия несет информацию о силе совершенного движения. ЭМГ сигнал позволяет оценить степень мышечного сокращения и уровень нервно-мышечной активации.
Анализ ультразвуковых изображений (фиг. 9 и фиг. 10) позволяет определить локальную толщину мышцы, выявить макроскопических архитектурные изменения, измерить угол перистости мышечных волокон. С помощью полученных параметров возможно оценить степень гипертрофии (атрофии) мышц.
Добавление сигнала ЭИ к УЗИ-сигналу позволит повысить информативность диагностического метода, определить объем и толщину мышцы, изучить структуру исследуемой области, определить природу гипертрофии и различить кратковременную, мио фибриллярную и саркоплазматическую гипертрофии.
Датчик силы, использующийся для регистрации ММГ сигнала, совместно с системой шаговых двигателей позволяет получить зависимость силы прижатия от перемещения (фиг. 7), которая несет информацию о жесткости мышцы.
В результате совместного анализа биологических сигналов, механических сигналов и УЗИ формируется оценка уровня гипертрофированности мышц и их функционального состояния.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс для бионического управления техническими устройствами | 2020 |
|
RU2748428C1 |
| Способ и комплекс бионического управления техническими устройствами | 2020 |
|
RU2756162C1 |
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2017 |
|
RU2673151C1 |
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2016 |
|
RU2627818C1 |
| Способ контроля и оценки функциональных резервов сердечной и скелетных мышц и компьютерно-реализованная система для его реализации | 2023 |
|
RU2823469C1 |
| Цифровой обучающий комплекс для подготовки к перспективным профессиям в области нейрофизиологии | 2019 |
|
RU2698994C1 |
| СПОСОБ УСТАНОВЛЕНИЯ ФАКТА ПОТЕРИ СОЗНАНИЯ ЛЕТЧИКОМ В РЕЗУЛЬТАТЕ ВОЗДЕЙСТВИЯ ПЕРЕГРУЗОК | 1992 |
|
RU2072948C1 |
| Тренажер с биологической обратной связью для реабилитации суставов и мышц кистей и пальцев рук | 2020 |
|
RU2735986C1 |
| СИСТЕМА, РЕГИСТРАТОР И СПОСОБ ПОВЕРХНОСТНОЙ ЭЛЕКТРОМИОГРАФИИ | 2016 |
|
RU2732344C2 |
| Способ восстановления двигательной функции конечности | 2019 |
|
RU2703838C1 |
Группа изобретений относится к медицине, а именно к способу и комплексу для измерения гипертрофии скелетных мышц. При исполнении способа систему датчиков точно позиционируют на поверхности кожи над областью исследования в покое или при выполнении мышечных сокращений с нагрузкой с помощью стенда. При этом стенд включает систему шаговых двигателей по координате X, Y и Z. Управляют сигналами с блока управления шаговыми двигателями с помощью команд оператора, введенных через персональный компьютер. Регистрируют сигналы электрического импеданса с измерительных электродов, ультразвуковые сигналы с ультразвукового датчика и механомиографические сигналы от датчиков силы для контроля силы прижатия измерительных датчиков к области интереса. В результате совместного анализа сигналов электрического импеданса, электромиограммы, механомиограммы и УЗИ формируют оценку уровня гипертрофированности мышц путем анализа их функционального состояния, силы, жесткости, параметров мышечного объема и сопротивления мышечных структур. Комплекс состоит из стенда, аппарата УЗИ и персонального компьютера, карты видеозахвата. Стенд состоит из блока регистрации биосигналов, блока регистрации механических сигналов, блока управления шаговыми двигателями, оптического энкодера перемещения по оси Z, силы для контроля силы прижатия измерительных датчиков к области интереса по оси Z и системы датчиков. Система датчиков включает в себя электродную систему для регистрации электромиограммы и элетроимпеданса и линейный ультразвуковой датчик. При этом выходы блока регистрации биосигналов и блока регистрации механических сигналов соединены с ПК. Выходы оптического энкодера перемещения по оси Z, датчиков силы по оси Z соединены со входом блока регистрации механических сигналов. Выход электродной системы соединен со входом блока регистрации биосигналов. Выход линейного ультразвукового датчика подключен к УЗИ-аппарату, выход которого соединен со входом карты видеозахвата. Выход карты видеозахвата в свою очередь соединен с ПК. Блок управления шаговыми двигателями представляет собой систему шаговых двигателей по координатам X, Y и Z. За счет введения в комплекс системы шаговых двигателей по координатам X, Y и Z обеспечивается точное позиционирование датчиков стенда над интересующей областью в пространстве, за счет контроля силы прижатия датчиков и совокупности информационных каналов обеспечивается улучшение качества измерения показателей, за счет совместного анализа сигналов электрического импеданса, электромиограммы, механомиограммы и УЗИ обеспечивается оценка уровня гипертрофированности мышц путем анализа их функционального состояния, силы, жесткости, параметров мышечного объема и сопротивления мышечных структур, повышается точность диагностики гипертрофии и атрофии скелетных мышц и достигается возможность ранней диагностики гипертрофии за счет комплексирования методов оценки мышечного объема, основанных на данных с УЗИ-датчика, электромиограммы и сигнале электроимпеданса. 2 н.п. ф-лы, 10 ил.
1. Способ измерения гипертрофии скелетных мышц, заключающийся в том, что систему датчиков точно позиционируют на поверхности кожи над областью исследования в покое или при выполнении мышечных сокращений с нагрузкой с помощью стенда, включающего систему шаговых двигателей по координате X, Y и Z, которыми управляют сигналами с блока управления шаговыми двигателями с помощью команд оператора, введенных через персональный компьютер, регистрируют сигналы с измерительных электродов, ультразвукового (УЗ) датчика и датчиков силы, в результате совместного анализа сигналов электрического импеданса, электромиограммы, механомиограммы и УЗИ формируют оценку уровня гипертрофированности мышц путем анализа их функционального состояния, силы, жесткости, параметров мышечного объема и сопротивления мышечных структур, отличающийся тем, что регистрируют сигналы электрического импеданса с измерительных электродов, УЗ и механомиографические сигналы от датчиков силы для контроля силы прижатия измерительных датчиков к области интереса.
2. Комплекс измерения гипертрофии скелетных мышц, состоящий из стенда, аппарата УЗИ и персонального компьютера (ПК), карты видеозахвата, стенд состоит из блока регистрации биосигналов, блока регистрации механических сигналов, блока управления шаговыми двигателями, оптического энкодера перемещения по оси Z, отличающийся тем, что имеются датчики силы для контроля силы прижатия измерительных датчиков к области интереса по оси Z и системы датчиков, включающей в себя электродную систему для регистрации электромиограммы и элетроимпеданса и линейный УЗ датчик, выходы блока регистрации биосигналов и блока регистрации механических сигналов соединены с ПК, выходы оптического энкодера перемещения по оси Z, датчиков силы по оси Z соединены со входом блока регистрации механических сигналов, выход электродной системы соединен со входом блока регистрации биосигналов, выход линейного УЗ датчика подключен к УЗИ-аппарату, выход которого соединен со входом карты видеозахвата, выход которой в свою очередь соединен с ПК, кроме того, блок управления шаговыми двигателями представляет собой систему шаговых двигателей по координатам X, Y и Z.
| WO 2011022068 A1, 24.02.2011 | |||
| WO 2019157486 A1, 15.08.2019 | |||
| WO 2017123765, 20.07.2017 | |||
| US 9861293 B2, 09.01.2018 | |||
| WO 2019074950 A1, 18.04.2019 | |||
| СПОСОБ ДИАГНОСТИКИ ДИСФУНКЦИИ ЖЕВАТЕЛЬНЫХ МЫШЦ | 2011 |
|
RU2465815C1 |

