Область техники, к которой относится изобретение
Изобретение относится к области робототехники и к складам предприятий и магазинов и может быть использовано для механизации и автоматизации перемещений мобильных роботов на складе.
Уровень техники
Использование складов имеет большое значение для организации работы промышленных предприятий. Поэтому существует необходимость в осуществлении механизации и автоматизации перемещений подъемно-транспортного оборудования, в качестве которого используют мобильный робот, посредством которого производят инвентаризацию и отбор тарно-штучных грузов, размещенных в многоярусных стеллажах, установленных в зоне хранения грузов.
Технологическое оборудование складов включает: подъемно-транспортное оборудование; грузозахватные приспособления к подъемно-транспортному оборудованию, в том числе полуавтоматические и автоматические; средства малой механизации; весоизмерительное оборудование (см. НТП-АПК 1.10.17.001-03. Нормы технологического проектирования баз и складов общего назначения предприятий ресурсного обеспечения. - Введ. 2003-11-01. - М.: ФГНУ НПЦ «Гипронисельхоз», 2003. - 56 с.).
Склад имеет следующие складские зоны: зону разгрузки, зону приемки товара, зону хранения, зону комплектации, зону погрузки. В зоне хранения создают проезды для внутрискладских средств механизации и технологические проходы между оборудованием. Большое значение для организации работы склада имеет инвентаризация грузов, организация внутрискладских перемещений грузов.
Из уровня техники известен склад (см. патентный документ RU 2077466 С1, «Склад для хранения и перемещения тарно-штучных грузов», опубл. 20.04.1997), содержащий многоярусные стеллажи, конвейеры, элеваторы для подачи и снятия грузов с конвейеров.
В документе: ГОСТ Р ИСО 8373-2014. Роботы и робототехнические устройства. Термины и определения. - Введ. 2016-01-01. - М.: Стандартинформ, 2015. - 33 с., определены термины, используемые по отношению к роботам и роботизированным устройствам, работающим как в промышленных, так и непромышленных областях. В документе: ИСО 9787:2013. Роботы и роботизированные устройства. Системы координат и условных обозначений перемещений (см.: ISO 9787:2013. Robots and robotic devices. - Coordinate systems and motion nomenclatures, URL: https://www.iso.org/standard/59444.html, дата обращения: 25.09.2019), установлены и определены системы координат роботов.
В патентном документе US 2015/0032252 A1 «System and method for piece-picking or put-away with a mobile manipulation robot» (опубл. 29.01.2015) описан способ организации работы склада, в котором внутрискладские перемещения грузов, отбор грузов из места хранения производят посредством использования мобильного робота. Таким образом, в качестве подъемно-транспортного оборудования используют мобильный робот, который в качестве автоматического грузозахватного приспособления содержит руку робота, захватное устройство, посредством которого производят отбор тарно-штучных грузов, размещенных в многоярусных стеллажах, установленных в зоне хранения грузов. Внутрискладские перемещения грузов из зоны хранения в зону комплектации производят посредством транспортировки грузов на мобильном роботе. В этом патентном документе указано то, что обмен данными между центральным сервером и мобильным роботом осуществляют посредством создания беспроводной локальной компьютерной сети. При этом мобильный робот содержит мобильную платформу, источник энергии, бортовой компьютер с устройством хранения информации.
В статье: «New 'Tally' robot designed to rapidly take stock of store shelves», Ian P. Murphy. - Retail Dive, November 12, 2015 (см. URL: https://www.retaildive.com/news/new-tally-robot-designed-to-rapidly-take-stock-of-store-shelves/409097/, дата обращения: 25.09.2019) описан способ использования мобильного робота для проведения в магазине инвентаризации товаров, размещенных в многоярусных стеллажах, при котором мобильный робот перемещают по проезду, и при этом посредством видеокамеры, установленной на этом мобильном роботе, получают изображения товаров и распознают эти товары и их реальное расположение.
Компания HDT Robotics, Inc. (см.: URL: http://www.hdtglobal.com, дата обращения: 25.09.2019) поставляет руку робота «Adroit МK2 Аrm» (см. URL: http://www.hdtglobal.com/wp-content/uploads/2015/01/HDT_MK2robotics_16.pdf, дата обращения: 25.09.2019), с установленным захватным устройством. При этом максимальная угловая скорость индивидуальных соединений руки робота - 120 градусов в секунду, максимальная угловая скорость индивидуальных соединений захватного устройства - 240 градусов в секунду, длина руки робота - около 127 см, усилие удержания предмета захватным устройством - 53 Н, количество степеней свободы руки робота - 11.
В статье «Skillful manipulation based on high-speed sensory-motor fusion», Taku Senoo, Yuji Yamakawa, Satoru Mizusawa, Akio Namiki, Masatoshi Ishikawa and Makoto Shimojo, - 2009 IEEE International Conference on Robotics and Automation, May 12-17, 2009, pp. 1611-1612. Publisher: IEEE. DOI: 10.1109/ROBOT.2009.5152852 (см.: URL: http://ieeexplore.ieee.org/document/5152852/, дата обращения: 25.09.2019) описана рука робота, на которую установлено запястье робота, посредством которой позиционируют и ориентируют видеокамеру, установленную на запястье робота.
Компания KUKA AG (см.: URL: http://www.kuka.com/, дата обращения: 25.09.2019) поставляет мобильный робот «KMR iiwa» (см. URL: https://www.kuka.com/en-at/products/mobility/mobile-robots/kmr-iiwa, дата обращения: 25.09.2019), который содержит руку робота с установленным захватным устройством, мобильную платформу, содержащую всенаправленный мобильный механизм, бортовой компьютер, сетевое оборудование, предназначенное для подключения бортового компьютера к беспроводной локальной компьютерной сети.
Для обеспечения работы мобильного робота, на бортовой компьютер мобильного робота устанавливают операционную систему реального времени, например, «NI Linux Real-Time» (см.: URL: http://www.ni.com/ru-ru/innovations/white-papers/13/introduction-to-ni-linux-real-time.html, дата обращения: 25.09.2019).
Для управления в режиме реального времени мобильным роботом, содержащим мобильную платформу, руку робота, захватное устройство, видеокамеру, и для осуществления работы мобильного робота в режиме реального времени, используют специальные компьютерные программы, например, программное обеспечение «LabVIEW Robotics Bundle» (см.: URL: http://www.ni.com/ru-ru/innovations/white-papers/10/overview-of-the-labview-robotics-module.html, дата обращения: 25.09.2019). Совокупность компьютерных программ «LabVIEW Robotics Bundle» содержит программное обеспечение встроенных систем реального времени, предназначенное для управления в режиме реального времени рукой робота, всенаправленным мобильным механизмом, приводами руки робота, обработкой изображений, и посредством которого осуществляют перемещения руки робота, на которой установлено запястье робота, с заданной скоростью, по заданной траектории.
При управлении мобильным роботом используют видеокамеры, подключенные к бортовому компьютеру мобильного робота, через которые на этом бортовом компьютере получают изображения объектов, с которыми взаимодействует мобильный робот. Для распознавания и определения пространственного расположения этих объектов используют специальные компьютерные программы, посредством которых реализуют алгоритмы компьютерного зрения (см. Компьютерное зрение, Л. Шапиро, Дж. Стокман. - М.: Бином. Лаборатория знаний, 2006. - 752 с., ISBN: 5-94774-384-1). Посредством алгоритмов компьютерного зрения и совокупностью специальных программ, посредством которых реализуют эти алгоритмы, выполняют, например:
- распознавание определенного объекта по полученным изображениям этого объекта;
- определение пространственного расположения определенного объекта относительно видеокамеры по полученным изображениям этого объекта;
- нахождение оценки скорости объекта по получаемым изображениям этого объекта;
- определение параметров траектории перемещения объекта в трехмерном пространстве.
Для вычисления расстояния до объекта используют две видеокамеры, через которые на бортовом компьютере мобильного робота получают изображения этого объекта с двух различных ракурсов. При этом алгоритмы компьютерного зрения применяют особенно эффективно в тех случаях, когда по получаемым изображениям объекта, имеющего форму многогранника, определяют пространственное расположение этого объекта.
В статье «Review of some advances and applications in real-time highspeed vision: Our views and experiences», Qing-Yi Gu, Idaku Ishii. - International Journal of Automation and Computing, August 2016, Volume 13, Issue 4, pp. 305-318, DOI: 10.1007/s11633-016-1024-0, описывают применение в области робототехники высокоскоростных видеокамер для распознавания и определения пространственного расположения объектов, для определения скорости движения объектов в режиме реального времени, и для проведения обмеров трехмерных объектов, и при этом отмечают то, что разработано достаточно много высокоскоростных систем технического зрения, посредством которых получают и обрабатывают в режиме реального времени, например, не менее 1000 изображений в секунду, с разрешением 1024×1024 пикселей.
При управлении мобильным роботом используют совокупность специальных программ, реализующих алгоритмы компьютерного зрения, например, программное обеспечение OpenCV (Open Source Computer Vision Library, см. URL: http://opencv.org, дата обращения: 25.09.2019), с применением стандарта OpenVX (см.: URL: http://www.khronos.org/openvx/, дата обращения: 25.09.2019), предназначенное для ускорения выполнения компьютерных программ в режиме реального времени в области компьютерного зрения.
Программное обеспечение OpenCV с поддержкой технологии CUDA (Compute Unified Device Architecture, см. URL: https://developer.nvidia.com/cuda-zone, дата обращения: 25.09.2019), и с применением стандарта OpenVX используют в робототехнике и в области автономных транспортных средств, что обеспечивает высокую скорость обработки одновременно нескольких изображений, полученных через несколько видеокамер, в режиме реального времени (см.: URL: https://opencv.org/cuda/, дата обращения: 25.09.2019). Например, в статье «Parallel image processing based on CUDA», Zhiyi Yang, Yating Zhu, Yong Pu. - 2008 International Conference on Computer Science and Software Engineering, pp.198-201, DOI: 10.1109/CSSE.2008.1448, Publisher: IEEE (см.: URL: http://ieeexplore.ieee.org/document/4722322/, дата обращения: 25.09.2019), описывают преимущества использования технологии CUDA для обработки изображений.
При этом для управления оборудованием, которое содержит мобильный робот, используют стандарт для кроссплатформенного параллельного программирования OpenCL (Open Computing Language, см.: URL: https://www.khronos.org/opencl/, дата обращения: 25.09.2019) и его реализации.
Для осуществления взаимодействия мобильного робота и пункта управления используют программную систему с параллельными вычислениями. Для этого используют, например, стандарт OpenMP (Open Multi-Processing, см.: URL: http://www.openmp.org/, дата обращения: 25.09.2019) и специальные компьютерные программы (см.: URL: https://www.openmp.org/resources/openmp-compilers-tools/, дата обращения: 25.09.2019), посредством которых осуществляют функционирование системы с параллельными вычислениями, в соответствии с этим стандартом.
Для осуществления взаимодействия мобильного робота и пункта управления осуществляют синхронизацию системного времени на бортовом компьютере мобильного робота, подключенном к беспроводной локальной компьютерной сети, например, посредством использования сетевого протокола NTP (см.: URL: http://www.ntp.org/, дата обращения: 25.09.2019). При этом, например, применяют специальную компьютерную программу ntpd (Network Time Protocol daemon, см. URL: http://www.ntp.org/downloads.html, дата обращения: 25.09.2019), посредством которой устанавливают и поддерживают системное время с осуществлением синхронизации с сервером точного времени.
Компьютерные программы, предназначенные для осуществления работы мобильного робота, инсталлируют на бортовой компьютер мобильного робота.
Траекторию движения объекта, брошенного под углом к горизонту (в частности, брошенного вертикально вверх), полагая, что сила сопротивления воздуха, действующая на брошенный объект, пропорциональна квадрату скорости объекта (при этом предварительно определяют коэффициент пропорциональности К, соответствующий движению объекта с определенной начальной скоростью), находят из специальной системы обыкновенных дифференциальных уравнений (см. «Аn introduction to computer simulation methods: applications to physical systems», Harvey Gould, Jan Tobochnik, Wolfgang Christian. - 3rd ed., Addison-Wesley Publishing Company, 2007, ISBN: 0-8053-7758-1, pp. 64-66).
Коэффициент сопротивления воздуха K, соответствующий движению объекта с определенной начальной скоростью, вычисляют экспериментально, например, с использованием видеозаписи метания объекта с заданной скоростью под углом к горизонту. Методы нахождения приближенного значения коэффициента сопротивления воздуха К для сверхзвуковых скоростей перемещения объекта хорошо изучены (см.: «Аппроксимация закона сопротивления воздуха 1943 г.», А.К. Ефремов. - Наука и образование: научное издание МГТУ им. Н.Э. Баумана, ISSN: 1994-0408, №10, 2013, сс. 269-284, DOI: 10.7463/1013.0609269).
Методы описания движения твердого тела приводят, например, в учебниках:
- Курс общей физики, т. 1. Механика. Молекулярная физика: Учебное пособие, И.В. Савельев. - 2-е изд., перераб. - М.: Наука. Главная редакция физико-математической литературы, 1982. - 432 с.;
- Курс теоретической механики: Учебник для машиностроит. спец. вузов, В.В. Добронравов, Н.Н. Никитин. - 4-е изд., перераб. и доп. - М.: Высш. школа, 1983. - 575 с.
В статье «Catching flying balls with a mobile humanoid: System overview and design considerations», Berthold Bauml, Oliver Birbach, Thomas Wimbock, Udo Frese, Alexander Dietrich, Gerd Hirzinger. - 2011 11th IEEE-RAS International Conference on Humanoid Robots (Humanoids), 26-28 Oct. 2011, pp. 513-520, DOI: 10.1109/Humanoids.2011.6100837 (см. URL: http://ieeexplore.ieee.org/document/6100837/, дата обращения: 25.09.2019) описывают захват на лету мяча захватным устройством, установленным на мобильном роботе. При этом мяч метает человек с расстояния около 6 м, со скоростью около 7 м/с, масса мяча - 50 г, диаметр мяча - 8,5 см. Для осуществления захвата на лету этого мяча используют видеокамеры и совокупность специальных программ, посредством которых реализуют алгоритмы компьютерного зрения.
Зона захвата захватного устройства представляет собой пространство, при помещении в которое предмета возможно осуществление захвата этого предмета этим захватным устройством. В патентном документе SU 1133086 А2 («Захват манипулятора», опубл. 07.01.1985) отмечают то, что надежность захвата и удержания предмета захватным устройством зависит от пространственного расположения предмета в зоне захвата захватного устройства.
Для захвата на лету предмета захватным устройством необходимо, чтобы этот предмет попал в зону захвата захватного устройства, и при этом его скорость относительно захватного устройства не превышала максимально допустимую для захвата. Захват на лету предмета захватным устройством осуществляют следующим образом. Сначала настраивают видеокамеры, с помощью специальных программ, на получение изображений метаемого предмета так, чтобы эти изображения содержали траекторию перемещения этого предмета при метании. Затем осуществляют метание предмета. На бортовом компьютере получают изображения метаемого предмета и по получаемым изображениям вычисляют параметры траектории перемещения этого предмета. При этом перемещают захватное устройство так, чтобы метаемый предмет попал в зону захвата этого захватного устройства. При попадании метаемого предмета в зону захвата захватного устройства осуществляют мгновенное закрытие захватного устройства. При этом момент попадания метаемого предмета в зону захвата захватного устройства определяют посредством обработки изображений этого предмета с помощью специальных программ, посредством которых реализуют алгоритмы компьютерного зрения.
Для обеспечения захвата и удержания предмета захватным устройством без проскальзывания необходимо, чтобы было осуществлено достаточное усилие удержания предмета этим захватным устройством и при этом, чтобы коэффициент трения покоя и коэффициент трения скольжения между материалами, из которых сделаны поверхности этого предмета и поверхности захватного устройства были достаточно большими. Из уровня техники известны методы обеспечения захвата и удержания тяжелых грузов захватным устройством без проскальзывания. В статье: «А method to control grip force and slippage for robotic object grasping and manipulation», Pavel Dzitac, Abdul Md Mazid. - 2012 20th Mediterranean Conference on Control & Automation (MED), Barcelona, Spain, July 3-6, 2012. Pages: 116-121, DOI: 10.1109/MED.2012.6265624, описаны методы обеспечения захвата и удержания тяжелых грузов захватным устройством без проскальзывания.
Для определения пространственного расположения звеньев, которые содержит рука робота и запястье робота, используют проприоцептивные датчики, например, энкодеры (см. патентный документ RU 2487007 С1, «Мобильный робот», опубл. 10.07.2013).
Из уровня техники известны стенды, предназначенные для определения координат центра масс изделий (см. патентный документ RU 2525629 С1, «Стенд для измерения массы и координат центра масс изделий», опубл. 20.08.2014).
Из уровня техники известны пункты управления, предназначенные для управления в режиме реального времени электронным оборудованием (см. патентный документ RU 145696 U1, «Пункт управления телемеханикой продуктопровода», опубл. 27.09.2014).
Погрешности отработки траектории движения руки робота, запястья робота, захватного устройства, всенаправленного мобильного механизма определяют с помощью испытания робота под нагрузкой. В документе: ИСО 9283:1998. Роботы промышленные манипуляционные. Рабочие характеристики и соответствующие методы тестирования (см.: ISO 9283:1998. Manipulating industrial robots - Performance criteria and related test methods, URL: https://www.iso.org/standard/22244.html, дата обращения: 25.09.2019), описаны методы определения и тестирования рабочих характеристик промышленных манипуляционных роботов, в частности, точности отработки траектории, точности скорости отработки траектории.
В документе: ГОСТ ИСО 8995-2002. Принципы зрительной эргономики. Освещение рабочих систем внутри помещений. - Введ. 2004-01-01. - М.: ИПК Издательство стандартов, 2003. - 32 с., изложены требования к освещению рабочих систем в рабочих помещениях промышленных зданий.
Для обмера помещений и построения трехмерных моделей помещений, а также, для обмера трехмерных объектов и построения трехмерных моделей объектов, габаритные размеры которых превышают, например, 1 м, используют специальные 3D-сканеры, в частности, например, 3D-сканер «Faro Focus 350» (см.: URL: https://www.faro.com/en-gb/products/construction-bim-cim/faro-focus/, дата обращения: 25.09.2019). Для обмера трехмерных объектов и построения трехмерных моделей объектов, габаритные размеры которых не превышают, например, 1 м, используют специальные 3D-сканеры, в частности, например, 3D-сканер «Artec Space Spider» (см.: URL: https://www.artec3d.com/ru/portable-3d-scanners/artec-spider, дата обращения: 25.09.2019).
В статье «Design of electromechanical height adjustable suspension», Nicola Amati, Andrea Tonoli, Luca Castellazzi, Sanjarbek Ruzimov. - Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, Article first published online: October 11, 2017, pp.: 1-17, DOI: 10.1177/0954407017728633 (см.: URL: http://journals.sagepub.com/doi/abs/10.1177/0954407017728633, дата обращения: 25.09.2019), описывают устройство электромеханической регулируемой по высоте подвески транспортного средства. В патентном документе US 4610462 A «Electronically controlled suspension system» (опубл. 09.09.1986 г.) описано применение электронно-управляемой регулируемой по высоте транспортной подвески для обеспечения устойчивости перемещения транспортного средства.
Применение подвески транспортного средства (по-другому называемой, транспортной подвеской или подвеской) с обеспечением независимого подвешивания для каждого колеса описано, например, в следующих патентных документах: US 4497505 A «Vehicle controlled suspension systems» (опубл. 05.02.1985 г.), US 2017/0043643 A1 «Vehicle having a chassis and a pendulum nacelle» (опубл. 16.02.2017 г.).
Из уровня техники известны стояночные тормоза транспортных средств с электронным управлением (см.: патентный документ RU 2177889 С2, «Стояночный тормоз транспортного средства», опубл.: 10.01.2002 г.). Например, в патентном документе: US5004077 А, «Electromechanical parking brake system», опубл.: 02.04.1991 г., описан тормоз транспортного средства с электронным управлением.
Из уровня техники известны способы перемещения мобильного робота на складе. В патентном документе: US 20180305122 A1, «Order picking system», опубл.: 25.10.2018 г., описан способ перемещения мобильного робота на верхний ярус стеллажа посредством перемещения этого мобильного робота в вертикальном направлении по зубчатым рейкам, прикрепленным к стеллажу, за счет использования шестерней.
Из уровня техники известны мобильные роботы с возможностью перемещения с периодическим отрывом от опорной поверхности (см. патентный документ US6484068 B1, «Robot apparatus and method for controlling jumping of robot device», опубл.: 19.11.2002 г.), по-другому называемые, прыгающие роботы (см. патентный документ US9004201 В2, «Jumping robot», опубл.: 14.04.2015 г.). В статье: «Wheeled robots to overcome ground unevenness in construction areas», Kazuo Tani, Osamu Matsumoto, Shuuji Kajita, Nobumasa Shirai. - 1991 Proceedings of the 8th ISARC, Stuttgart, Germany, pp. 159-166, DOI: 10.22260/ISARC1991/0017, описаны способы осуществления прыжка колесного мобильного робота за счет работы электронно-управляемой регулируемой по высоте транспортной подвески. В статье: «Recent advances on locomotion mechanisms of hybrid mobile robots», Shun Hoe Lim, Jason Teo. - WSEAS Transactions on Systems (ISSN: 1109-2777, E-ISSN: 2224-2678), Volume 14, 2015, pp. 11-25, описаны колесные прыгающие мобильные роботы, осуществляющие прыжок за счет работы электронно-управляемой регулируемой по высоте транспортной подвески.
В статье: «А mechatronics approach to the design of lightweight arms and multifingered hands», G. Hirzinger, J. Butterfafl, M. Fischer, M. Grcbenstein, I. Schaefer, N. Sporer. - Proceedings of the 2000 IEEE International Conference on Robotics & Automation, San Francisco, April 2000, pp. 46-54 (см. URL: http://citeseerx.ist.psu.edu/viewdoc/summary? doi=10.1.1.476.967, дата обращения: 25.09.2019), описаны способы использования запирающих устройств в руке робота и в захватном устройстве, установленном на руке робота. В статье: «Lock your robot: а review of locking devices in robotics», Michiel Plooij, Glenn Mathijssen, Pierre Cherelle, Dirk Lefeber, Bram Vanderborght. - IEEE Robotics & Automation Magazine, Volume 22, Issue 1, March 2015, Pages: 106-117, DOI: 10.1109/MRA.2014.2381368, описаны запирающие устройства, используемые в робототехнике.
В статье: «Brachiation type of mobile robot», Т. Fukuda, H. Hosokai, Y. Kondo. - Fifth International Conference on Advanced Robotics. Robots in Unstructured Environments, 19-22 June 1991, pp.915-920, DOI: 10.1109/ICAR.1991.240556, описаны мобильные роботы, использующие методы брахиации для перемещения по перекладинам, расположенным над поверхностью земли, посредством рук робота (по-другому называемые брахиационные мобильные роботы). В статье: «Learning algorithm for a brachiating robot», H. Kajima, Y. Hasegawa, T. Fukuda. - Applied Bionics and Biomechanics, Volume 1, Issue 1, January 2003, Pages: 57-66, DOI: 10.3233/ABB-2003-9693532, описаны способы осуществления перемещения брахиационных мобильных роботов. В статье: «Swing and locomotion control for a two-link brachiation robot», F. Saito, T. Fukuda, F. Arai. - IEEE Control Systems Magazine, Volume 14, Issue 1, Feb. 1994, Pages: 5-12, DOI: 10.1109/37.257888, описан брахиационный мобильный робот, который перемещают посредством использования вращательного шарнира, установленного в руке этого мобильного робота.
Из уровня техники известно программное обеспечение для создания твердотельной 3D-модели объекта, например, SolidWorks (см.: URL: https://www.solidworks.com, дата обращения: 25.09.2019), при этом программное обеспечение SolidWorks обеспечивает возможность задания плотностей материалов, из которых изготовлены элементы, которые содержит этот объект. В программном обеспечении SolidWorks реализована возможность вычисления центра масс объекта с учетом расположения всех элементов этого объекта с заданными плотностями материалов, из которых изготовлены эти элементы (см. URL:https://help.solidworks.com/2018/english/SolidWorks/sldworks/c_Center_of_Mass_Point_Ref_Geom.htm, дата обращения: 25.09.2019).
Методы определения положения центра масс твердого тела (в частности, имеющего ось симметрии) описаны, например, в учебниках:
- Теоретическая механика. 20 лекций. Ч. 2. Динамика: Учебное пособие для студентов очного и заочного обучения, В.В. Андронов. - 2-е изд., доп. и испр. - М.: МГУЛ, 2003. - 128 с.;
- Курс теоретической механики. Часть 1. Статика. Кинематика. Учебник для втузов, А.А. Яблонский, В.М. Никифорова. - Издание 3-е, исправленное. - М.: «Высшая школа», 1966. - 439 с.
Для защиты электрических аппаратов от внешних воздействий используют корпусы для электрических аппаратов. В документе: ГОСТ 32126.1-2013. Коробки и корпусы для электрических аппаратов, устанавливаемые в стационарные электрические установки бытового и аналогичного назначения. Часть 1. Общие требования. - Введ. 2014-01-01. - М.: Стандартинформ, 2014. - 37 с., определены требования к корпусам, являющимся частью электрических аппаратов и предназначенным для защиты этих аппаратов от внешних воздействий.
Из уровня техники известны держатели, предназначенные для крепления на них различных деталей (см.: RU 2302963 С2, «Универсальный держатель», опубл.: 20.07.2007 г.). Из уровня техники известны держатели, состоящие из стержня и двух опор, посредством которых этот стержень позиционируют, при этом стержень жестко прикрепляют к опорам, и опоры жестко прикрепляют к вертикальной поверхности стены помещения (см.: URL: http://gidromarket.ru/derzhatel_polotenec_wasserkraft_leine_k5030.htm, дата обращения: 25.09.2019).
Из уровня техники не известен способ, в котором мобильный робот перемещают на полку верхнего яруса стеллажа посредством осуществления прыжка этого мобильного робота с последующим захватом на лету за держатель (установленный на верхнем ярусе этого стеллажа) захватным устройством, установленным на руке этого мобильного робота, и посредством последующего осуществления расположения мобильной платформы этого робота на полке верхнего яруса этого стеллажа за счет приведения в действие приводов вращательных шарниров, установленных в руке этого мобильного робота.
Раскрытие сущности изобретения
Изобретением является новый способ перемещения мобильного робота на складе. Заявленный способ предназначен для осуществления перемещения мобильного робота на полку верхнего яруса стеллажа, установленного в зоне хранения склада. Мобильный робот перемещают на полку верхнего яруса стеллажа посредством осуществления прыжка этого мобильного робота с последующим захватом на лету без проскальзывания захватным устройством (установленным на руке этого мобильного робота) за держатель, установленный на верхнем ярусе этого стеллажа, и посредством последующего осуществления расположения мобильной платформы этого мобильного робота на полке верхнего яруса этого стеллажа за счет приведения в действие приводов вращательных шарниров, установленных в руке этого мобильного робота. После перемещения на полку верхнего яруса стеллажа мобильный робот используют, например, для инвентаризации и перемещения грузов, размещенных на верхнем ярусе этого стеллажа.
Для реализации заявленного изобретения используют мобильный робот, который является шарнирным роботом, содержащим вращательные и сферические шарниры.
Мобильный робот содержит:
- мобильную платформу, на которой размещают все остальные элементы мобильного робота, содержащую всенаправленный мобильный механизм колесного типа, содержащий тормозную систему, и при этом мобильная платформа содержит корпус мобильной платформы;
- бортовой компьютер с подключенным устройством хранения информации;
- сетевое оборудование, предназначенное для подключения бортового компьютера в качестве узла компьютерной сети к беспроводной локальной компьютерной сети на основе технологии Wi-Fi;
- руку робота, запястье робота, установленное на этой руке робота, и рабочий орган робота, который является захватным устройством, установленным на этом запястье робота, при этом рука робота и запястье робота соединены вращательным шарниром;
- две руки робота, два запястья робота, которые установлены по одному на каждой из этих рук робота, и предназначены для установки на каждом из них по одной видеокамере;
- две видеокамеры, установленные на запястьях робота, при этом каждая видеокамера размещена на отдельном запястье робота, с помощью которого эту видеокамеру позиционируют и ориентируют;
- источник энергии, предназначенный для обеспечения нормальной работы всех элементов мобильного робота.
Пол помещения склада делают так, что верхняя плоскость пола помещения склада выполнена в виде ровной плоской горизонтальной сплошной поверхности. Используют мобильную платформу с возможностью перемещения по ровной плоской сплошной горизонтальной поверхности. Корпус мобильной платформы содержит днище мобильной платформы, при этом нижняя плоскость днища мобильной платформы мобильного робота изготовлена в виде жесткой плоской поверхности. Мобильная платформа содержит всенаправленный мобильный механизм, содержащий соответствующую совокупность проприоцептивных датчиков, приводов и блоков управления приводами. Перемещениями мобильной платформы управляют посредством осуществления управления всенаправленным мобильным механизмом. Всенаправленным мобильным механизмом управляют посредством получения, через каждый блок управления приводом, от бортового компьютера сигналов, представляющих параметры режимов работы соответствующего привода, и посредством осуществления работы привода в соответствии с получаемыми сигналами.
Все руки робота, все запястья робота, захватное устройство мобильного робота содержат соответствующую совокупность запирающих устройств, посредством которых блокируют все шарниры, которые содержат все руки робота, все запястья робота, захватное устройство мобильного робота.
Все руки робота, все запястья робота, захватное устройство мобильного робота содержат соответствующую совокупность проприоцептивных датчиков, приводов и блоков управления приводами.
Каждый привод, каждый блок управления приводом, каждый проприоцептивный датчик установлены и подключены к источнику энергии, размещенному на мобильной платформе. Каждый привод установлен с возможностью осуществления управления этим приводом посредством блока управления приводом. Каждый блок управления приводом установлен с возможностью получения сигналов от бортового компьютера, представляющих параметры режимов работы привода, и с возможностью управления работой привода, в соответствии с получаемыми сигналами. Каждый проприоцептивный датчик установлен с возможностью передачи на бортовой компьютер сигнала, представляющего результаты работы соответствующего привода, включенного в состав всенаправленного мобильного механизма, руки робота, запястья робота, захватного устройства мобильного робота.
Бортовой компьютер с подключенным устройством хранения информации установлен на мобильной платформе, при этом к бортовому компьютеру подключены всенаправленный мобильный механизм, рука робота, запястье робота, захватное устройство, установленное на этом запястье робота, и к этому бортовому компьютеру подключены две руки робота, два запястья робота, которые установлены по одному на каждой из этих рук робота, две видеокамеры, установленные на этих запястьях робота, по одной на каждом из этих запястий. При этом подключение к бортовому компьютеру всенаправленного мобильного механизма, руки робота, запястья робота, захватного устройства осуществлено посредством подключения к бортовому компьютеру всех проприоцептивных датчиков и всех блоков управления приводами, которые содержат всенаправленный мобильный механизм, рука робота, запястье робота и захватное устройство. Бортовой компьютер установлен с возможностью передавать каждому блоку управления приводом сигналы, представляющие параметры режимов работы этого привода. Бортовой компьютер и подключенное к нему устройство хранения информации подключены к источнику энергии, размещенному на мобильной платформе. К бортовому компьютеру подключены две видеокамеры, установленные на запястьях робота, с возможностью получения на бортовом компьютере изображений через эти две видеокамеры. Каждая видеокамера жестко прикреплена к соответствующему запястью робота. Каждую видеокамеру позиционируют и ориентируют посредством передачи сигналов, представляющих параметры режимов работы приводов руки робота и запястья робота, от бортового компьютера на блоки управления приводами руки робота и запястья робота, и посредством осуществления работы приводов в этих режимах.
На мобильной платформе установлено сетевое оборудование, которое подключено к бортовому компьютеру и к источнику энергии, размещенному на мобильной платформе, и которое установлено с возможностью подключения бортового компьютера, посредством этого сетевого оборудования, в качестве узла компьютерной сети к беспроводной локальной компьютерной сети на основе технологии Wi-Fi.
На мобильной платформе установлен источник энергии, предназначенный для обеспечения нормальной работы всех элементов мобильного робота, к которому подключены бортовой компьютер, устройство хранения информации, две видеокамеры, всенаправленный мобильный механизм мобильной платформы, три руки робота, три запястья робота, захватное устройство, все приводы, все блоки управления приводами, все проприоцептивные датчики, установленные в этих руках робота, запястьях робота, захватном устройстве и всенаправленном мобильном механизме, и подключено сетевое оборудование, предназначенное для подключения бортового компьютера, в качестве узла компьютерной сети, к беспроводной локальной компьютерной сети на основе технологии Wi-Fi.
На бортовой компьютер с подключенным устройством хранения информации инсталлированы следующие специальные программы:
- операционная система реального времени;
- программное обеспечение встроенных систем реального времени, предназначенное для управления в режиме реального времени рукой робота, запястьем робота, захватным устройством, всенаправленным мобильным механизмом;
- программное обеспечение, предназначенное для реализации алгоритмов компьютерного зрения, в частности, для обработки в режиме реального времени изображений, распознавания определенных объектов по полученным изображениям этих объектов, определения пространственного расположения определенных объектов по полученным изображениям этих объектов, нахождения оценки скорости объекта по получаемым изображениям этого объекта, определения параметров траектории перемещения объекта в трехмерном пространстве, вычисления расстояния до объекта;
- специальные программы, посредством которых реализуют алгоритмы параллельных вычислений;
- специальную программу, посредством которой устанавливают и поддерживают системное время с осуществлением синхронизации с сервером точного времени;
программное обеспечение, предназначенное для создания твердотельной 3D-модели объекта с возможностью задания плотностей материалов, из которых изготовлены элементы, которые содержит этот объект;
- программное обеспечение, предназначенное для вычисления центра масс объекта посредством использования твердотельной 3D-модели объекта с учетом расположения всех элементов этого объекта с заданными плотностями материалов, из которого изготовлены элементы, которые содержит этот объект.
На мобильной платформе мобильного робота установлена электронно-управляемая регулируемая по высоте транспортная подвеска с обеспечением независимого подвешивания каждого колеса этой мобильной платформы. При перемещении мобильного робота в рабочем режиме по горизонтальным поверхностям, нижнюю плоскость днища мобильной платформы этого робота располагают параллельно верхней плоскости пола помещения склада за счет осуществления работы этой электронно-управляемой регулируемой по высоте транспортной подвески. Эта подвеска установлена с возможностью увеличения и с возможностью уменьшения дорожного просвета мобильной платформы мобильного робота. При этом увеличение дорожного просвета этой мобильной платформы осуществляют за счет работы этой транспортной подвески посредством одновременного перемещения, относительно этой мобильной платформы, всех колес мобильной платформы с одинаковой скоростью, с одинаковым ускорением и на одинаковое расстояние, перпендикулярно нижней плоскости днища этой мобильной платформы, в сторону от этой мобильной платформы. При этом уменьшение дорожного просвета этой мобильной платформы осуществляют за счет работы этой транспортной подвески посредством одновременного перемещения, относительно этой мобильной платформы, всех колес мобильной платформы с одинаковой скоростью, с одинаковым ускорением и на одинаковое расстояние, перпендикулярно нижней плоскости днища этой мобильной платформы, в сторону к этой мобильной платформе. При этом эта электронно-управляемая регулируемая по высоте транспортная подвеска подключена к бортовому компьютеру мобильного робота (с возможностью управления ее работой посредством этого бортового компьютера) и к источнику энергии, установленному на мобильной платформе мобильного робота (с возможностью обеспечения нормальной работы этой электронно-управляемой регулируемой по высоте транспортной подвески). Посредством программирования блока управления этой подвеской устанавливают максимальную высоту подъема этой мобильной платформы и минимальную высоту опускания этой мобильной платформы. При этом максимальную высоту подъема мобильной платформы устанавливают посредством задания максимального расстояния, на котором возможно одновременно расположить центры всех колес этой мобильной платформы (за счет осуществления работы этой транспортной подвески) от нижней поверхности днища этой мобильной платформы. При этом минимальную высоту опускания мобильной платформы устанавливают посредством задания минимального расстояния, на котором возможно одновременно расположить центры всех колес этой мобильной платформы (за счет осуществления работы этой транспортной подвески) от нижней поверхности днища этой мобильной платформы. При этом максимальной высоты подъема мобильной платформы достигают посредством одновременного перемещения (за счет осуществления работы этой транспортной подвески), относительно этой мобильной платформы, всех колес этой мобильной платформы с одинаковой скоростью, с одинаковым ускорением и на максимально возможное расстояние от днища этой мобильной платформы, перпендикулярно нижней плоскости днища этой мобильной платформы, в сторону от этой мобильной платформы. При этом минимальной высоты опускания мобильной платформы достигают посредством одновременного перемещения (за счет осуществления работы этой транспортной подвески), относительно этой мобильной платформы, всех колес этой мобильной платформы с одинаковой скоростью, с одинаковым ускорением и на минимально возможное расстояние до днища этой мобильной платформы, перпендикулярно нижней плоскости днища этой мобильной платформы, в сторону к этой мобильной платформе.
Управление работой этой подвески осуществляют посредством передачи сигнала, представляющего параметры режима работы этой подвески, от бортового компьютера на блок управления этой подвеской. Возможны следующие режимы работы подвески: режим подъема мобильной платформы мобильного робота из текущего расположения за счет работы этой транспортной подвески, посредством одновременного перемещения относительно этой мобильной платформы, всех колес мобильной платформы с заданной одинаковой скоростью, с заданным одинаковым ускорением и на заданное одинаковое расстояние перпендикулярно нижней плоскости днища этой мобильной платформы, в сторону от этой мобильной платформы, и режим опускания мобильной платформы мобильного робота из текущего расположения в расположение, соответствующее установленной минимальной высоте опускания мобильной платформы.
Прыжок мобильного робота выполняют посредством осуществления фазы разгона и фазы свободного полета мобильного робота. Перемещение мобильного робота в фазе разгона осуществляют за счет увеличения дорожного просвета мобильной платформы посредством работы транспортной подвески, посредством одновременного перемещения, относительно этой мобильной платформы, всех колес мобильной платформы с одинаковой скоростью, с одинаковым ускорением и на одинаковое расстояние, перпендикулярно нижней плоскости днища этой мобильной платформы, в сторону от этой мобильной платформы. При этом началу фазы разгона соответствует минимальная высота опускания мобильной платформы, и концу фазы разгона соответствует максимальная высота подъема мобильной платформы.
Руку мобильного робота, предназначенную для установки захватного устройства, выбирают так, что длина этой руки составляет от 2,5 до 3,2 величины, равной сумме следующих двух величин: высоты корпуса мобильной платформы и минимального расстояния, на котором возможно одновременно расположить центры всех колес мобильной платформы от нижней поверхности днища мобильной платформы, за счет осуществления работы электронно-управляемой регулируемой по высоте транспортной подвески.
Мобильный робот изготавливают с использованием специального программного обеспечения, в котором реализована возможность вычисления центра масс объекта с учетом расположения всех элементов этого объекта с заданными плотностями материалов, из которого изготовлены эти элементы. Мобильная платформа содержит корпус (содержащий днище этой мобильной платформы), имеющий ось симметрии, которая перпендикулярна нижней плоскости днища этой мобильной платформы. При этом центр масс корпуса мобильной платформы расположен на оси симметрии этого корпуса. При этом всенаправленный мобильный механизм содержит четыре одинаковых колеса с обеспечением одинакового независимого подвешивания для каждого колеса. При этом эти две пары колес установлены попарно симметрично относительно оси симметрии корпуса мобильной платформы, и при этом соответствующие элементы подвески, к которым прикреплены эти две пары колес, также установлены попарно симметрично относительно оси симметрии корпуса мобильной платформы. При этом перед осуществлением подъема и опускания мобильной платформы две пары колес располагают попарно симметрично относительно оси симметрии корпуса этой мобильной платформы и включают тормозную систему мобильной платформы. Таким образом, при осуществлении подъема и опускания мобильной платформы сохраняют попарную симметричность этих двух пар колес относительно оси симметрии корпуса мобильной платформы, и при этом сохраняют попарную симметричность соответствующих двух пар элементов подвески, к которым прикреплены эти две пары колес. Таким образом, ось симметрии корпуса мобильной платформы параллельна направлению действия силы тяжести при расположении этой мобильной платформы на полу помещения склада так, что центры всех колес этой мобильной платформы расположены одновременно на одинаковом расстоянии от нижней поверхности днища этой мобильной платформы.
Все элементы мобильной платформы установлены так, что центр масс мобильной платформы расположен на оси симметрии корпуса мобильной платформы при условии попарно симметричного расположения двух пар колес относительно оси симметрии корпуса мобильной платформы, и при условии попарно симметричного расположения соответствующих двух пар элементов подвески, к которым прикреплены эти две пары колес. Таким образом, при осуществлении подъема и опускания мобильной платформы (с учетом описанных выше условий осуществления подъема и опускания мобильной платформы) центр масс мобильной платформы находится на оси симметрии корпуса мобильной платформы.
На мобильную платформу устанавливают все элементы мобильного робота так, что при начальном расположении захватного устройства в открытом положении (которое соответствует началу фазы разгона мобильного робота), при начальных расположениях (которые соответствуют началу фазы разгона мобильного робота) двух видеокамер, двух рук робота, на которых установлены две видеокамеры, при одновременном расположении всех колес мобильной платформы на минимально возможном расстоянии до днища этой мобильной платформы (что соответствует минимальной высоте опускания мобильной платформы), и при условии попарно симметричного расположения двух пар колес относительно оси симметрии корпуса мобильной платформы, и при условии попарно симметричного расположения соответствующих двух пар элементов подвески, к которым прикреплены эти две пары колес, центр масс мобильного робота расположен на оси симметрии корпуса мобильной платформы, внутри корпуса этой мобильной платформы.
Таким образом, при осуществлении подъема мобильной платформы в фазе разгона (с учетом описанных выше условий расположений всех элементов мобильного робота, которые соответствуют началу фазы разгона мобильного робота, и условий осуществления подъема мобильной платформы) центр масс мобильного робота находится на оси симметрии корпуса мобильной платформы.
Помещение для склада выбирают одноэтажным, и при этом этот склад имеет, в частности, зону хранения. Освещение в помещении для склада выполняют в соответствии со стандартом: ГОСТ ИСО 8995-2002. Принципы зрительной эргономики. Освещение рабочих систем внутри помещений. - Введ. 2004-01-01. - М.: ИПК Издательство стандартов, 2003. - 32 с. В зоне хранения создают проезд для внутрискладских средств механизации. Мобильный робот используют для проведения инвентаризации грузов в качестве внутрискладского средства механизации и в качестве подъемно-транспортного оборудования, содержащего грузозахватные приспособления. Для хранения грузов используют полочные односекционные двухъярусные стеллажи.
Задают глобальную систему координат. Глобальную систему координат OXYZ задают ортогональной, правоориентированной, и задают так, что начало глобальной системы координат выбирают принадлежащим верхней плоскости пола помещения склада. При этом плоскость OXY содержит верхнюю горизонтальную плоскость пола помещения этого склада, ось OZ направлена вертикально вверх, перпендикулярно к плоскости OXY, оси ОХ и OY принадлежат плоскости OXY и взаимно перпендикулярны. Задают систему координат каждой видеокамеры. Каждую систему координат каждой видеокамеры задают ортогональной, правоориентированной, и задают так, что единичный вектор, задающий направление третьей оси этой системы координат, расположен на оптической оси видеокамеры и направлен в сторону объекта видеосъемки, и единичный вектор, задающий направление первой оси этой системы координат, перпендикулярен единичному вектору, задающему направление третьей оси этой системы координат. При этом, начало системы координат видеокамеры выбирают принадлежащим поверхности корпуса видеокамеры, в точке пересечения этой поверхности и оптической оси этой видеокамеры. Задают систему координат захватного устройства мобильного робота. Систему координат захватного устройства задают ортогональной, правоориентированной. Началом системы координат захватного устройства выбирают центральную точку захватного устройства, и выбирают направления трех координатных осей этой системы координат захватного устройства. Задают систему координат мобильной платформы. Систему координат мобильной платформы задают ортогональной, правоориентированной, и задают так, что единичный вектор, задающий направление первой оси этой системы координат, направлен перпендикулярно оси симметрии корпуса мобильной платформы, единичный вектор, задающий направление третьей оси этой системы координат, направлен параллельно оси симметрии корпуса мобильной платформы, при этом началом системы координат мобильной платформы выбирают исходную точку мобильной платформы.
Эти параметры глобальной системы координат, системы координат каждой видеокамеры, систему координат мобильной платформы, систему координат захватного устройства определяют с использованием оборудования, которое содержат мобильный робот и пункт управления, и эти параметры размещают на компьютере пункта управления и на бортовом компьютере мобильного робота, на соответствующих устройствах хранения информации.
Локализацию мобильного робота (то есть распознавание расположения мобильного робота, включающего расположение мобильной платформы, трех рук робота, трех запястий робота, захватного устройства, двух видеокамер, по отношению к глобальной системе координат) в определенный момент времени осуществляют, с помощью специальных программ, посредством автоматического функционирования этого робота с осуществлением счисления пути, с применением сочетания датчиков, при котором используют данные, получаемые на бортовом компьютере этого мобильного робота, от проприоцептивных датчиков, установленных на этом мобильном роботе, и при котором используют изображения, получаемые от двух видеокамер, размещенных на мобильной платформе этого мобильного робота. При этом локализацию мобильного робота осуществляют непрерывно, посредством использования специальных программ, посредством которых реализуют алгоритмы параллельных вычислений, и посредством использования специальных программ, посредством которых реализуют алгоритмы компьютерного зрения.
Параметры расположения видеокамеры в каждый определенный момент времени представляют собой упорядоченную последовательность девяти чисел, где первые три числа - это координаты начала системы координат видеокамеры, вычисленные в глобальной системе координат, следующие три числа - это координаты единичного вектора, расположенного на оптической оси видеокамеры и направленного в сторону объекта видеосъемки, вычисленные в глобальной системе координат, остальные три числа - это координаты единичного вектора первой оси системы координат, вычисленные в глобальной системе координат. Эти параметры расположения видеокамеры определяют с использованием оборудования, которое содержит мобильный робот, и эти параметры размещают на компьютере пункта управления и на бортовом компьютере мобильного робота, на соответствующих устройствах хранения информации.
Параметры расположения мобильной платформы мобильного робота в каждый определенный момент времени представляют собой упорядоченную последовательность девяти чисел, где первые три числа - это координаты начала системы координат мобильной платформы, вычисленные в глобальной системе координат, остальные шесть чисел - это координаты единичных векторов первой и третьей осей системы координат мобильной платформы, соответственно, вычисленные в глобальной системе координат. Эти параметры расположения мобильной платформы мобильного робота определяют с использованием оборудования, которое содержит соответствующий мобильный робот, и эти параметры размещают на компьютере пункта управления и на бортовом компьютере соответствующего мобильного робота, на соответствующих устройствах хранения информации.
Параметры расположения мобильной платформы мобильного робота в определенный момент времени определяют, с помощью специальных программ, с осуществлением счисления пути, с применением сочетания датчиков, и посредством использования:
- данных, получаемых на бортовом компьютере в виде сигналов от проприоцептивных датчиков, установленных в этой мобильной платформе, в двух руках робота и в двух запястьях робота, на которых установлены две видеокамеры;
- параметров расположения мобильной платформы мобильного робота, в моменты времени, предшествующие этому определенному моменту времени, и которые были определены ранее;
- параметров расположений двух видеокамер, установленных на этой мобильной платформе и вычисленных в системе координат мобильной платформы, и в глобальной системе координат;
- изображений, которые получают через две видеокамеры, установленные на мобильной платформе этого мобильного робота, и совокупности специальных программ, посредством которых реализуют алгоритмы компьютерного зрения.
Для мобильного робота, с использованием взвешивания, обмера деталей, и, при необходимости, с использованием стенда для определения центра масс изделий, и с использованием 3D-сканера, определяют следующие параметры, соответствующие этому мобильному роботу. Эти параметры определяют с применением специальных программ, посредством которых реализуют алгоритмы компьютерного зрения, с применением программного обеспечения для создания твердотельной 3D-модели объекта с возможностью задания плотностей материалов, из которых изготовлены элементы, которые содержит этот объект, и с применением программного обеспечения встроенных систем реального времени, предназначенного для управления в режиме реального времени рукой робота, запястьем робота, захватным устройством, всенаправленным мобильным механизмом, с использованием оборудования, которое содержит мобильный робот и пункт управления, и эти параметры размещают на компьютере пункта управления и на бортовом компьютере мобильного робота, на соответствующих устройствах хранения информации. Таким образом, определяют следующие параметры, соответствующие этому мобильному роботу:
- параметры твердотельной трехмерной модели (по-другому называемой 3D-моделью) мобильного робота с заданными плотностями материалов, из которых изготовлены элементы, которые содержит этот мобильный робот;
- коэффициент сопротивления воздуха, определяемый свойствами среды, формой мобильного робота, соответствующий квадрату скорости мобильного робота, и соответствующий этому мобильному роботу, и определяемый при перемещении этого мобильного робота со скоростью не превышающей 15 м/с.
Для хранения грузов используют полочные односекционные двухъярусные стеллажи. Стеллажи размещают в зоне хранения. Каждая полка этих стеллажей выполнена в виде ровной плоской сплошной поверхности и прикреплена непосредственно к стойкам. Полки нижнего и верхнего яруса каждого стеллажа расположены так, что верхние плоскости полок нижнего и верхнего яруса расположены горизонтально при установке этого стеллажа в зоне хранения.
На каждой полке верхнего яруса каждого стеллажа устанавливают ограничитель хода, посредством которого препятствуют опрокидыванию мобильного робота после размещения этого мобильного робота на полке верхнего яруса стеллажа. Ограничитель хода изготавливают в виде прямоугольной пластины, длиной, равной длине полки верхнего яруса этого стеллажа, шириной превышающей сумму следующих двух величин: высоты корпуса мобильной платформы и минимального расстояния, на котором возможно одновременно расположить центры всех колес мобильной платформы от нижней поверхности днища мобильной платформы, за счет осуществления работы электронно-управляемой регулируемой по высоте транспортной подвески. Ограничитель хода жестко прикрепляют боковой стороной к краю полки верхнего яруса стеллажа вдоль всего края полки верхнего яруса этого стеллажа так, что ограничитель хода расположен перпендикулярно к верхней плоскости полки верхнего яруса этого стеллажа.
На каждой полке верхнего яруса каждого стеллажа устанавливают держатель. Держатель состоит из стержня и двух опор, посредством которых этот стержень располагают так, что продольная ось этого стержня расположена параллельно верхней плоскости полки верхнего яруса этого стеллажа, при этом стержень жестко прикрепляют к опорам, и опоры жестко прикрепляют к краю полки верхнего яруса этого стеллажа. Каждая опора имеет Г-образный вид. Длина стержня равна длине полки верхнего яруса этого стеллажа. Диаметр этого стержня определяют экспериментально так, чтобы можно было осуществить надежный захват без проскальзывания за этот стержень захватным устройством, установленном на руке мобильного робота. Этот стержень имеет шероховатую поверхность. При этом коэффициент трения покоя и коэффициент трения скольжения между материалами, из которых сделаны поверхности этого стержня и контактные поверхности захватного устройства, превышают значение 0,5. Стержень, посредством двух опор, располагают так, что расстояние по горизонтали от этого стержня до края полки верхнего яруса стеллажа превышает половину длины корпуса мобильной платформы, и расстояние по вертикали от этого стержня до края полки верхнего яруса стеллажа составляет от 0,5 до 0,95 величины, равной сумме следующих трех величин: высоты корпуса мобильной платформы, длины руки мобильного робота, на которой установлено захватное устройство, и минимального расстояния, на котором возможно одновременно расположить центры всех колес мобильной платформы от нижней поверхности днища мобильной платформы, за счет осуществления работы электронно-управляемой регулируемой по высоте транспортной подвески.
Для каждого стеллажа определяют параметры, соответствующие этому стеллажу, посредством обмера этого стеллажа, с использованием специальных программ, посредством которых реализуют алгоритмы компьютерного зрения, и специального оборудования, в частности, например, с использованием 3D-сканера, при этом эти параметры определяют с использованием оборудования, которое содержит мобильный робот и пункт управления, и с использованием специальных программ, предназначенных для управления в режиме реального времени рукой робота, запястьем робота, захватным устройством, всенаправленным мобильным механизмом. Таким образом, для каждого стеллажа определяют следующие параметры, соответствующие этому стеллажу (в пунктах от (а) до (г)), и эти параметры размещают на компьютере пункта управления и на бортовом компьютере мобильного робота, на соответствующих устройствах хранения информации:
(а) адрес стеллажа, по которому однозначно определяют этот стеллаж на этом складе;
(б) параметры 3D-модели держателя, вычисленные в глобальной системе координат;
(в) координаты четырех точек, принадлежащих верхней плоскости полки верхнего яруса этого стеллажа, вычисленные в глобальной системе координат, которые задают прямоугольник, который задает место размещения мобильного робота после перемещения этого мобильного робота на верхний ярус этого стеллажа;
(г) параметры ограничителя хода, установленного на верхнем ярусе этого стеллажа, то есть длину и ширину этого ограничителя хода.
Точкой отрыва мобильного робота от поверхности пола помещения склада при осуществлении прыжка мобильного робота считают точку, в которой находится центр масс мобильного робота в момент отрыва этого мобильного робота от поверхности пола помещения склада при осуществлении прыжка этого мобильного робота. Точкой захвата за держатель при осуществлении прыжка мобильного робота считают точку, в которой находится центр масс мобильного робота в момент начала осуществления закрытия захватного устройства для осуществления захвата на лету за держатель захватным устройством, установленным на руке этого мобильного робота.
Для мобильного робота и каждого стеллажа, с помощью специальных программ, определяют следующие параметры, соответствующие перемещению мобильного робота на полку верхнего яруса этого стеллажа, и эти параметры определяют с использованием оборудования, которое содержит мобильный робот и пункт управления, и эти параметры размещают на компьютере пункта управления и на бортовом компьютере мобильного робота, на соответствующих устройствах хранения информации:
- параметры начального расчетного расположения мобильной платформы мобильного робота, которые соответствуют началу фазы разгона мобильного робота при осуществлении прыжка этого мобильного робота, то есть координаты начала системы координат мобильной платформы мобильного робота, вычисленные в глобальной системе координат, и координаты единичных векторов первой и третьей осей системы координат мобильной платформы мобильного робота, вычисленные в глобальной системе координат, и которые соответствуют началу фазы разгона мобильного робота при осуществлении прыжка этого мобильного робота;
- параметры расчетных расположений (по отношению к глобальной системе координат) двух видеокамер, двух рук робота и двух запястий робота, размещенных на мобильной платформе мобильного робота, и на которых установлены эти две видеокамеры, и которые соответствуют началу фазы разгона мобильного робота при осуществлении прыжка этого мобильного робота (при этом центр масс мобильного робота находится на оси симметрии корпуса мобильной платформы), при которых изображения, получаемые через эти две видеокамеры, содержат изображения захватного устройства и держателя, установленного на этот стеллаж, и которые вычисляют экспериментально, например, с использованием 3D-сканера, с применением специальных программ, посредством которых реализуют алгоритмы компьютерного зрения, и с применением программного обеспечения встроенных систем реального времени, предназначенного для управления в режиме реального времени рукой робота, запястьем робота, захватным устройством, всенаправленным мобильным механизмом;
- параметры начального расчетного расположения захватного устройства в открытом положении, запястья робота и руки робота, на которой установлены это захватное устройство и это запястье робота, по отношению к глобальной системе координат, которые соответствуют началу фазы разгона мобильного робота при осуществлении прыжка этого мобильного робота (при этом центр масс мобильного робота находится на оси симметрии корпуса мобильной платформы), и которые вычисляют экспериментально, например, с использованием 3D-сканера, с применением специальных программ, посредством которых реализуют алгоритмы компьютерного зрения;
- параметры расчетных расположений захватного устройства в открытом положении, запястья робота и руки робота, на которой установлены это захватное устройство и это запястье робота, по отношению к глобальной системе координат, которые соответствуют расчетному моменту начала осуществления закрытия захватного устройства для осуществления захвата на лету за держатель захватным устройством, установленным на руке этого мобильного робота, то есть соответствуют завершению фазы свободного полета мобильного робота;
- расчетные координаты (вычисленные в глобальной системе координат) точки отрыва этого мобильного робота от пола помещения склада, то есть расчетные координаты центра масс этого мобильного робота в момент отрыва этого мобильного робота от пола помещения склада, которые соответствуют началу фазы свободного полета мобильного робота при осуществлении прыжка этого мобильного робота;
- расчетные координаты (вычисленные в глобальной системе координат) точки захвата на лету захватным устройством мобильного робота за держатель, то есть расчетные координаты центра масс этого мобильного робота в расчетный момент захвата на лету захватным устройством мобильного робота за этот держатель, и которые соответствуют расчетному моменту перед закрытием этого захватного устройства, посредством которого осуществляют захват на лету за этот держатель, то есть соответствуют завершению фазы свободного полета мобильного робота;
- расчетная скорость перемещения центра масс мобильного робота в расчетный момент захвата на лету захватным устройством этого мобильного робота за этот держатель;
- параметры расчетной траектории перемещения мобильного робота в фазе свободного полета при осуществлении прыжка этого мобильного робота, то есть расчетные координаты центра масс мобильного робота и расчетные координаты вектора скорости центра масс мобильного робота, вычисленные в глобальной системе координат, для множества заданных расчетных моментов времени, наступающих после расчетного момента отрыва этого мобильного робота от пола помещения склада при осуществлении прыжка, и расчетную длительность свободного полета мобильного робота;
- расчетная скорость центра масс мобильного робота в момент отрыва этого мобильного робота от пола помещения склада, которая соответствует началу фазы свободного полета мобильного робота при осуществлении прыжка этого мобильного робота;
- расчетная скорость перемещения центров всех колес мобильной платформы от нижней поверхности днища этой мобильной платформы в момент отрыва этого мобильного робота от пола помещения склада, которая соответствует началу фазы свободного полета мобильного робота при осуществлении прыжка этого мобильного робота;
- параметры расчетной линии перемещения центра масс этого мобильного робота в фазе разгона, то есть множество расчетных координат точек, представляющих собой совокупность расположений центра масс мобильного робота при его перемещении в фазе разгона, включая расчетные координаты точки, в которой размещают центр масс этого мобильного робота в начальном положении при начале фазы разгона, и включая расчетные координаты центра масс мобильного робота в момент отрыва этого мобильного робота от пола помещения склада;
- расчетную длительность фазы разгона мобильного робота при осуществлении прыжка;
- параметры режимов работы приводов транспортной подвески мобильного робота, при которых обеспечивают расчетную скорость (которая соответствует началу фазы свободного полета мобильного робота при осуществлении прыжка этого мобильного робота) перемещения центров всех колес мобильной платформы от нижней поверхности днища этой мобильной платформы в момент отрыва этого мобильного робота от пола помещения склада в заданный расчетный момент времени, с учетом расположения мобильной платформы мобильного робота при осуществлении прыжка этого мобильного робота, для заданного расчетного момента начала фазы разгона этого мобильного робота, и для заданной расчетной длительности фазы разгона этого мобильного робота;
- параметры множества расчетных расположений захватного устройства в открытом положении в момент перед закрытием этого захватного устройства, таких, что при закрытии этого захватного устройства при этих расположениях захватного устройства возможно осуществление надежного захвата без проскальзывания за этот держатель, то есть соответствующее множество координат начала системы координат захватного устройства мобильного робота, вычисленных в глобальной системе координат, и соответствующее множество координат единичных векторов всех трех осей системы координат захватного устройства мобильного робота, вычисленных в глобальной системе координат.
При этом начальные расчетные расположения захватного устройства в открытом положении, запястья робота и руки робота, на которой установлены это захватное устройство и это запястье робота, которые соответствуют началу фазы разгона мобильного робота при осуществлении прыжка этого мобильного робота, предпочтительно устанавливают так, что центральная точка запястья робота расположена на расстоянии по вертикали от мобильной платформы, которое составляет от 2,3 до 3,3 величины, равной сумме следующих двух величин: высоты корпуса мобильной платформы и минимального расстояния, на котором возможно одновременно расположить центры всех колес мобильной платформы от нижней поверхности днища мобильной платформы, за счет осуществления работы электронно-управляемой регулируемой по высоте транспортной подвески.
Параметры расчетной траектории перемещения мобильного робота в фазе свободного полета при осуществлении прыжка вычисляют, с помощью специальных программ, следующим образом. Сначала определяют вертикальную прямую, проходящую через расчетную точку отрыва мобильного робота от пола помещения склада, то есть прямую, на которой находятся точки расчетной траектории перемещения центра масс мобильного робота в фазе свободного полета. На этой прямой задают координатную ось, которая направлена вертикально вверх, то есть направлена противоположно направлению силы тяжести, и в качестве начала этой координатной оси выбирают, например, точку пересечения этой прямой и верхней горизонтальной плоскости пола помещения склада. Расчетную траекторию перемещения центра масс мобильного робота при осуществлении прыжка вертикально вверх в фазе свободного полета (полагая, что сила сопротивления воздуха, действующая на мобильный робот при осуществлении прыжка в фазе свободного полета, пропорциональна квадрату скорости этого мобильного робота), относительно координатной оси, введенной на этой вертикальной прямой, находят из следующей системы обыкновенных дифференциальных уравнений:
y'=v,

где:
y=y(1) - расчетная координата центра масс мобильного робота в момент времени t, м;
y'=y'(t) - производная функции y=y(t) в момент времени t, м/с;
v=v(t) - расчетная скорость центра масс мобильного робота в момент времени t, м/с;
v'=v'(t) - производная функции v=v(t) в момент времени t, м/с2;
g - ускорение свободного падения, м/с2;
К - коэффициент сопротивления воздуха, определяемый свойствами среды, формой мобильного робота, и соответствующий квадрату начальной скорости мобильного робота;
m - масса мобильного робота, кг;
|v|=|v(t)| - абсолютная величина расчетной скорости центра масс мобильного робота в момент времени t, м/с.
Для системы уравнений (1) рассматривают следующие граничные условия относительно координатной оси, введенной на вертикальной прямой, проходящей через расчетную точку отрыва мобильного робота от пола помещения склада и расчетную точку захвата на лету захватным устройством мобильного робота за держатель:

где:
у(Т) - расчетная координата центра масс мобильного робота в момент времени Т, м;
Т - расчетный момент времени, в который центр масс мобильного робота находится в точке отрыва мобильного робота от пола помещения склада при осуществлении прыжка этого мобильного робота, с; А - расчетное значение координаты центра масс мобильного робота в момент времени Т, м;
y(L) - расчетная координата центра масс мобильного робота в момент времени L, м;
L - расчетный момент времени начала осуществления закрытия захватного устройства для осуществления захвата на лету за держатель захватным устройством, установленным на руке этого мобильного робота, с;
В - расчетное значение координаты центра масс мобильного робота в момент времени L, м;
v(L) - расчетная скорость центра масс мобильного робота в момент времени L, м/с;
С - значение расчетной скорости центра масс мобильного робота в момент времени L, м/с.
При этом значения величин А, В, С - заданы, значение L заранее неизвестно и его определяют из системы уравнений (1) с учетом граничных условий (2). При этом значение С больше нуля, и значение А меньше значения В. Например, значение С равно 0,1 м/с.
При этом учитывают то, что мобильный робот должен перемещаться только вверх во время фазы свободного полета мобильного робота при осуществлении прыжка.
Обозначим постоянную С1:

где:
C1 - постоянная;
m - масса мобильного робота, кг;
g - ускорение свободного падения, м/с2;
К - коэффициент сопротивления воздуха, определяемый свойствами среды, формой мобильного робота, и соответствующий квадрату начальной скорости мобильного робота;
С - значение расчетной скорости центра масс мобильного робота в расчетный момент времени, в который центр масс мобильного робота находится в точке захвата за держатель посредством захватного устройства мобильного робота, м/с.
Обозначим постоянную С2:

где:
С2 - постоянная;
В - расчетное значение координаты центра масс мобильного робота в расчетный момент времени, в который центр масс мобильного робота находится в точке захвата на лету за держатель захватным устройством, установленным на руке этого мобильного робота при осуществлении прыжка этого мобильного робота, м;
m - масса мобильного робота, кг;
K - коэффициент сопротивления воздуха, определяемый свойствами среды, формой мобильного робота, и соответствующий квадрату начальной скорости мобильного робота;
g - ускорение свободного падения, м/с2;
С - расчетное значение скорости центра масс мобильного робота в расчетный момент времени, в который центр масс мобильного робота находится в точке захвата за держатель посредством захватного устройства мобильного робота, м/с.
Значение L в силу системы уравнений (1) с учетом граничных условий (2) получают в следующем виде:

где:
L - расчетный момент времени начала осуществления закрытия захватного устройства для осуществления захвата на лету за держатель захватным устройством, установленным на руке этого мобильного робота, с;
Т - расчетный момент времени, в который центр масс мобильного робота находится в точке отрыва мобильного робота от пола помещения склада при осуществлении прыжка этого мобильного робота, с;
m - масса мобильного робота, кг;
K - коэффициент сопротивления воздуха, определяемый свойствами среды, формой мобильного робота, и соответствующий квадрату начальной скорости мобильного робота; g - ускорение свободного падения, м/с2;
А - расчетное значение координаты центра масс мобильного робота в момент времени Т, м;
С2 - постоянная, которую находят по формуле (4);
С1 - постоянная, которую находят по формуле (3).
Параметры расчетной траектории перемещения центра масс мобильного робота в фазе свободного полета при осуществлении прыжка этого мобильного робота определены функциями y(t) и v(t), удовлетворяющими системе уравнений (1) с граничными условиями (2), которые находят по следующим формулам:

где:
y=y(t) - расчетная координата центра масс мобильного робота в момент времени t, м;
t - момент времени во время осуществления прыжка мобильного робота, то есть действительное число, принимающее все значения от расчетного момента времени отрыва мобильного робота от пола помещения склада до расчетного момента времени начала осуществления закрытия захватного устройства для осуществления захвата на лету за держатель захватным устройством, установленным на руке мобильного робота, с;
m - масса мобильного робота, кг;
K - коэффициент сопротивления воздуха, определяемый свойствами среды, формой мобильного робота, и соответствующий квадрату начальной скорости мобильного робота; g - ускорение свободного падения, м/с2;
L - расчетный момент времени начала осуществления закрытия захватного устройства для осуществления захвата на лету за держатель захватным устройством, установленным на руке этого мобильного робота, с;
C1 - постоянная, которую находят по формуле (3);
С2 - постоянная, которую находят по формуле (4);
v=v(t) - расчетная скорость центра масс мобильного робота в момент времени t, м/с.
Начальную расчетную скорость отрыва мобильного робота от пола помещения склада при осуществлении прыжка вычисляют по следующей формуле:

где:
v(T) - расчетная скорость центра масс мобильного робота в момент времени Т, м/с;
Т - расчетный момент времени, в который центр масс мобильного робота находится в точке отрыва мобильного робота от пола помещения склада при осуществлении прыжка этого мобильного робота, с;
m - масса мобильного робота, кг;
g - ускорение свободного падения, м/с2;
К - коэффициент сопротивления воздуха, определяемый свойствами среды, формой мобильного робота, и соответствующий квадрату начальной скорости мобильного робота;
L - расчетный момент времени начала осуществления закрытия захватного устройства для осуществления захвата на лету за держатель захватным устройством, установленным на руке этого мобильного робота, с;
C1 - постоянная, которую находят по формуле (3).
Скорость перемещения F центров всех колес мобильной платформы в сторону от нижней поверхности днища этой мобильной платформы в точке отрыва мобильного робота от пола помещения склада при осуществлении прыжка вычисляют, с помощью специальных программ, следующим образом. При этом учитывают то, что при осуществлении подъема мобильной платформы в фазе разгона (с учетом описанных выше условий расположений всех элементов мобильного робота, которые соответствуют началу фазы разгона мобильного робота, и условий осуществления подъема мобильной платформы в фазе разгона) центр масс мобильного робота находится на оси симметрии корпуса мобильной платформы, и при этом ось симметрии корпуса мобильной платформы перпендикулярна верхней плоскости пола помещения склада. Перемещение центра масс мобильного робота в фазе разгона осуществляют за счет увеличения дорожного просвета этой мобильной платформы посредством работы транспортной подвески, посредством одновременного перемещения, относительно этой мобильной платформы, всех колес мобильной платформы с одинаковой скоростью, с одинаковым ускорением и на одинаковое расстояние, перпендикулярно нижней плоскости днища этой мобильной платформы, в сторону от этой мобильной платформы. При этом началу фазы разгона соответствует минимальная высота опускания мобильной платформы, и концу фазы разгона соответствует максимальная высота подъема мобильной платформы. Высота подъема мобильной платформы в фазе разгона однозначно определена расстоянием, на котором одновременно располагают центры всех колес этой мобильной платформы (за счет осуществления работы этой транспортной подвески) от нижней поверхности днища этой мобильной платформы. Обозначим через S0 - минимальное расстояние, на котором в фазе разгона одновременно располагают центры всех колес мобильной платформы от нижней поверхности днища этой мобильной платформы, соответствующее минимальной высоте опускания мобильной платформы. Обозначим через S1000 - максимальное расстояние, на котором в фазе разгона одновременно располагают центры всех колес мобильной платформы от нижней поверхности днища этой мобильной платформы, соответствующее максимальной высоте подъема мобильной платформы. Рассмотрим множество расстояний, на которых в фазе разгона одновременно располагают центры всех колес мобильной платформы от нижней поверхности днища этой мобильной платформы, которое определяют по следующей формуле:

где:
S1 - расстояние, на котором в фазе разгона одновременно располагают центры всех колес этой мобильной платформы от нижней поверхности днища этой мобильной платформы, м;
i - порядковый номер значения расстояния, на котором в фазе разгона одновременно располагают центры всех колес мобильной платформы от нижней поверхности днища этой мобильной платформы, то есть целое число, принимающее все значения от 0 до 1000;
S0 - минимальное расстояние, на котором в фазе разгона одновременно располагают центры всех колес мобильной платформы от нижней поверхности днища этой мобильной платформы, соответствующее минимальной высоте опускания мобильной платформы, м;
S1000 - максимальное расстояние, на котором в фазе разгона одновременно располагают центры всех колес мобильной платформы от нижней поверхности днища этой мобильной платформы, соответствующее максимальной высоте подъема мобильной платформы, м.
Для каждого значения Si (для всех целых чисел i от 0 до 1000) определяют величину Ui - расстояние от центра масс мобильного робота до пола помещения склада, соответствующее расположению мобильного робота в фазе разгона, при котором центры всех колес мобильной платформы в фазе разгона расположены на расстоянии Si от нижней поверхности днища этой мобильной платформы. При этом каждую величину Ui (для всех целых чисел i от 0 до 1000) находят с применением программного обеспечения для вычисления центра масс объекта посредством использования твердотельной 3D-модели объекта с учетом расположения всех элементов этого объекта с заданными плотностями материалов, из которого изготовлены элементы, которые содержит этот объект. Таким образом, получают функцию, заданную таблично для всех целых чисел i от 0 до 1000:
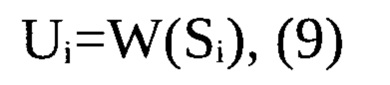
где:
Ui - расстояние от центра масс мобильного робота до пола помещения склада, соответствующее расположению мобильного робота в фазе разгона, при котором центры всех колес мобильной платформы в фазе разгона расположены на расстоянии Si от нижней поверхности днища этой мобильной платформы, м;
i - порядковый номер значения расстояния, на котором в фазе разгона одновременно располагают центры всех колес мобильной платформы от нижней поверхности днища этой мобильной платформы, то есть целое число, принимающее все значения от 0 до 1000;
W - функция, посредством которой расстоянию, на котором в фазе разгона одновременно располагают центры всех колес этой мобильной платформы от нижней поверхности днища этой мобильной платформы, ставят в соответствие расстояние от центра масс мобильного робота до пола помещения склада;
Si - расстояние, на котором в фазе разгона одновременно располагают центры всех колес этой мобильной платформы от нижней поверхности днища этой мобильной платформы, м.
Таким образом, значение А, используемое в формуле (2), задают посредством использования значения U1000, определяемого по формуле (9) с учетом формулы (8). В частности, значение А равно значению U1000.
Следовательно, расчетную скорость перемещения центров всех колес мобильной платформы от нижней поверхности днища этой мобильной платформы в точке отрыва мобильного робота в фазе разгона определяют по следующей формуле:

где:
F - расчетная скорость перемещения центров всех колес мобильной платформы в сторону от нижней поверхности днища этой мобильной платформы в точке отрыва мобильного робота от пола помещения склада в фазе разгона, м/с;
v(T) - расчетная скорость центра масс мобильного робота в момент времени Т, определяемая по формуле (7) с учетом формул (1)-(6), м/с;
Т - расчетный момент времени, в который центр масс мобильного робота находится в точке отрыва мобильного робота от пола помещения склада при осуществлении прыжка этого мобильного робота, с;
W - функция, посредством которой расстоянию, на котором в фазе разгона одновременно располагают центры всех колес этой мобильной платформы от нижней поверхности днища этой мобильной платформы, ставят в соответствие расстояние от центра масс мобильного робота до пола помещения склада;
W'(S1000) - производная функции W при значении аргумента, равного S1000;
S1000 - максимальное расстояние, на котором в фазе разгона одновременно располагают центры всех колес мобильной платформы от нижней поверхности днища этой мобильной платформы, соответствующее максимальной высоте подъема мобильной платформы, м.
При этом значение W'(S1000) вычисляют посредством использования методов численного дифференцирования для функции, заданной таблично.
Для мобильного робота создают отдельный проезд, по которому перемещают этот мобильный робот. Предпочтительно, проезд создают в виде ориентированного простого двумерного многоугольника, расположенного в плоскости OXY глобальной системы координат, посредством задания вершин простой ломаной линии, которая представляет собой границу этого многоугольника. Эту простую ломаную линию задают посредством упорядоченной последовательности чисел, которые представляют собой координаты вершин этой простой ломаной линии, вычисленные в глобальной системе координат, и которые записаны в соответствии с порядком обхода вершин этого ориентированного простого двумерного многоугольника. При этом эта упорядоченная последовательность чисел представляет собой параметры соответствующего проезда для мобильного робота.
При этом задают параметры линий возможных перемещений мобильной платформы мобильного робота по соответствующему проезду, которые предпочтительно задают в виде ломаных линий, лежащих на плоскости OXY глобальной системы координат, которые представляют собой линии возможных перемещений ортогональной проекции начала системы координат мобильной платформы на плоскость OXY глобальной системы координат, при перемещениях мобильной платформы. При этом каждую такую ломаную линию задают в виде упорядоченной последовательности координат точек, вычисленных в глобальной системе координат, лежащих на плоскости OXY глобальной системы координат, и которые записаны в соответствии с порядком обхода вершин этой ломаной линии. При этом эта упорядоченная последовательность чисел представляет собой параметры соответствующей линии возможного перемещения мобильного робота по соответствующему проезду.
При этом параметры проезда, предназначенного для перемещения мобильного робота, и параметры линий возможных перемещений мобильного робота по соответствующему проезду определяют с использованием оборудования, которое содержат мобильный робот и пункт управления, и эти параметры размещают на компьютере пункта управления и на бортовом компьютере мобильного робота, на соответствующих устройствах хранения информации.
Для осуществления складских операций на складе используют пункт управления. Пункт управления содержит компьютер, с подключенным устройством ввода, устройством хранения информации, и беспроводным сетевым оборудованием, предназначенным для подключения этого компьютера в качестве узла компьютерной сети к беспроводной локальной компьютерной сети на основе технологии Wi-Fi. Пункт управления размещают в помещении склада, вне зоны хранения склада, и вне проезда, предназначенного для перемещения мобильного робота.
На компьютер пункта управления с подключенным устройством хранения информации инсталлированы следующие специальные программы:
- операционная система реального времени;
- специальная программа, посредством которой устанавливают и поддерживают системное время с осуществлением синхронизации с сервером точного времени;
специальные программы, посредством которых реализуют алгоритмы параллельных вычислений;
программное обеспечение, предназначенное для создания твердотельной 3D-модели объекта с возможностью задания плотностей материалов, из которых изготовлены элементы, которые содержит этот объект;
- программное обеспечение, предназначенное для вычисления центра масс объекта посредством использования твердотельной 3D-модели объекта с учетом расположения всех элементов этого объекта с заданными плотностями материалов, из которого изготовлены элементы, которые содержит этот объект.
Заявленный способ перемещения мобильного робота на складе отличается от известных способов тем, что перемещение мобильного робота на полку верхнего яруса стеллажа осуществляют посредством осуществления прыжка этого мобильного робота с последующим захватом на лету за держатель (установленный на верхнем ярусе этого стеллажа) захватным устройством, установленным на руке этого мобильного робота, и посредством последующего осуществления расположения мобильной платформы этого робота на полке верхнего яруса этого стеллажа за счет приведения в действие приводов вращательных шарниров, установленных в руке этого мобильного робота. При этом полка верхнего яруса стеллажа расположена на высоте, превышающей сумму трех величин: высоты корпуса мобильной платформы, длины руки мобильного робота, на которой установлено захватное устройство, и максимального расстояния, на котором возможно одновременно расположить центры всех колес мобильной платформы от нижней поверхности днища мобильной платформы, за счет осуществления работы электронно-управляемой регулируемой по высоте транспортной подвески.
Перемещение мобильного робота по проезду, по поверхности пола помещения склада в заданное расположение (которое задано программой задач) посредством автоматического функционирования этого робота осуществляют следующим образом. Сначала на бортовом компьютере, с помощью специальных программ, осуществляют локализацию этого мобильного робота посредством автоматического функционирования этого робота. Затем на бортовом компьютере мобильного робота, с помощью специальных программ, определяют последовательности режимов работы всех приводов, установленных во всех руках робота, во всех запястьях робота, во всенаправленном мобильном механизме мобильной платформы этого мобильного робота, посредством осуществления которых осуществляют перемещение всех рук робота, всех запястий робота и мобильной платформы этого мобильного робота в заданное расположение в соответствии с определенными линиями возможных перемещений мобильной платформы этого мобильного робота по определенному проезду.
Тарно-штучные грузы вручную размещают на полках стеллажей. Размещение грузов на полках производят без свесов. Информацию об адресах стеллажей размещают в компьютере пункта управления на устройстве хранения информации, с применением программирования ручного ввода данных, с использованием устройства ввода. Затем выполняют обмер помещения склада (вместе с содержимым этого помещения), выполняют построение трехмерной модели помещения этого склада (вместе с содержимым этого помещения) и определяют параметры этой трехмерной модели, посредством использования 3D-сканера. Информацию, которая содержит параметры этой трехмерной модели, размещают в компьютере пункта управления на устройстве хранения информации, посредством использования устройства ввода.
Перед началом перемещения мобильного робота на складе сначала осуществляют режим работы подвески мобильной платформы мобильного робота, посредством которого осуществляют опускание мобильной платформы мобильного робота из текущего расположения в расположение, соответствующее установленной минимальной высоте опускания мобильной платформы. Затем размещают мобильный робот в проезде, предназначенном для перемещений этого мобильного робота. При этом информацию, представляющую параметры начального расположения мобильного робота, размещают в компьютере пункта управления на устройстве хранения информации, посредством использования устройства ввода. Затем осуществляют функционирование беспроводной локальной компьютерной сети на основе технологии Wi-Fi, к которой подключают, в качестве узлов компьютерной сети, компьютер пункта управления и бортовой компьютер мобильного робота. При этом с помощью специальных программ, устанавливают и непрерывно поддерживают системное время с осуществлением синхронизации с сервером точного времени на компьютере пункта управления и бортовом компьютере мобильного робота, в режиме автоматического функционирования этого робота, с использованием специальных программ, посредством которых реализуют алгоритмы параллельных вычислений. При этом в качестве сервера точного времени устанавливают компьютер пункта управления. Затем всю информацию, относящуюся к этому складу, размещенную в компьютере пункта управления на устройстве хранения информации, передают через беспроводную локальную компьютерную сеть на основе технологии Wi-Fi от компьютера пункта управления на бортовой компьютер мобильного робота.
Перемещение мобильного робота на складе, а именно, перемещение мобильного робота на полку верхнего яруса стеллажа осуществляют следующим образом. На компьютере пункта управления, с применением программирования ручного ввода данных, с использованием устройства ввода, вводят адрес стеллажа, на полку верхнего яруса которого будут перемещать мобильный робот. Затем на компьютере пункта управления, с помощью специальных программ, в режиме автоматического функционирования этого пункта управления, передают этот адрес на бортовой компьютер мобильного робота через беспроводную локальную компьютерную сеть на основе технологии Wi-Fi.
Затем на бортовом компьютере мобильного робота, посредством его автоматического функционирования, через беспроводную локальную компьютерную сеть на основе технологии Wi-Fi, получают адрес стеллажа, на полку верхнего яруса которого будут перемещать мобильный робот.
Затем на бортовом компьютере мобильного робота, посредством его автоматического функционирования, определяют параметры, соответствующие этому стеллажу, в том числе, параметры начального расположения мобильной платформы мобильного робота при осуществлении прыжка этого мобильного робота на верхний ярус этого стеллажа.
Затем на бортовом компьютере мобильного робота, посредством его автоматического функционирования, определяют параметры линий, вдоль которых будут перемещать мобильную платформу мобильного робота по соответствующему проезду для перемещения из текущего расположения мобильного робота в начальное расположение при осуществлении прыжка мобильного робота на верхний ярус этого стеллажа. Затем мобильный робот, посредством его автоматического функционирования, перемещают (по проезду, вдоль соответствующей линии) в начальное расположение при осуществлении прыжка мобильного робота на верхний ярус этого стеллажа.
Перемещение мобильного робота на полку верхнего яруса стеллажа посредством осуществления прыжка этого мобильного робота осуществляют следующим образом.
Перед осуществлением прыжка сначала открывают захватное устройство мобильного робота, посредством автоматического функционирования мобильного робота. Затем осуществляют расположение захватного устройства в открытом положении, запястья робота и руки робота, на которой установлены это захватное устройство и это запястье робота, которые соответствуют началу фазы разгона мобильного робота при осуществлении прыжка этого мобильного робота.
Затем, посредством автоматического функционирования мобильного робота, осуществляют расположение двух видеокамер, размещенных на мобильной платформе мобильного робота посредством перемещения двух рук робота и двух запястий робота, на которых они размещены, так, чтобы изображения, получаемые через эти видеокамеры, содержали изображения захватного устройства и держателя, который установлен на верхнем ярусе этого стеллажа. При этом бортовой компьютер мобильного робота, с помощью специальных программ, настраивают, посредством автоматического функционирования мобильного робота, на получение изображений от двух видеокамер, размещенных на мобильной платформе мобильного робота, и на обработку полученных изображений для распознавания держателя, захватного устройства и для определения реального пространственного расположения захватного устройства, с помощью специальных программ, посредством которых реализуют алгоритмы компьютерного зрения. При этом все элементы мобильного робота перед началом фазы разгона мобильного робота (с учетом описанных выше условий расположений всех элементов мобильного робота, которые соответствуют началу фазы разгона мобильного робота, и условий осуществления подъема мобильной платформы в фазе разгона), посредством автоматического функционирования мобильного робота, располагают так, что центр масс мобильного робота находится на оси симметрии корпуса мобильной платформы.
Сначала на бортовом компьютере мобильного робота, с помощью специальных программ, определяют расчетный момент начала фазы разгона мобильного робота (для обеспечения прыжка этого мобильного робота по расчетной траектории), и расчетный момент отрыва мобильного робота от пола помещения склада. Затем, в режиме автоматического функционирования мобильного робота, с помощью специальных программ, определяют параметры режимов работы приводов транспортной подвески мобильного робота, при которых обеспечивают расчетную скорость перемещения центров всех колес мобильной платформы перпендикулярно нижней плоскости днища мобильной платформы, в сторону от нижней поверхности днища этой мобильной платформы в заданный расчетный момент отрыва мобильного робота от пола помещения склада, для заданного расчетного момента начала фазы разгона этого мобильного робота, и для заданной расчетной длительности фазы разгона этого мобильного робота. При этом учитывают погрешность отработки траектории движения всенаправленного мобильного механизма этого мобильного робота.
Затем осуществляют разгон этого мобильного робота посредством работы транспортной подвески мобильного робота в соответствии с этими определенными параметрами режимов работы приводов транспортной подвески мобильного робота, для заданного расчетного момента начала фазы разгона этого мобильного робота, и для заданной расчетной длительности фазы разгона этого мобильного робота, для осуществления перемещения центра масс мобильного робота в фазе разгона по расчетной линии так, чтобы в заданный расчетный момент отрыва мобильного робота от пола помещения склада центр масс мобильного робота был расположен в заданной расчетной точке отрыва мобильного робота от пола помещения склада, и при этом чтобы расчетная скорость центра масс мобильного робота была равна заданной расчетной начальной скорости отрыва этого мобильного робота от пола помещения склада. В результате этих действий осуществляют прыжок мобильного робота.
При этом на бортовом компьютере мобильного робота получают изображения через две видеокамеры, и производят обработку полученных изображений в режиме реального времени, и распознают захватное устройство и держатель, и определяют реальное пространственное расположение захватного устройства по отношению к глобальной системе координат, с учетом времени, необходимого для получения и обработки изображений этого держателя и захватного устройства, в частности, получают, в режиме реального времени, информацию о расположении и скорости перемещения начала системы координат захватного устройства мобильного робота, посредством автоматического функционирования мобильного робота. При этом применяют специальные программы, посредством которых реализуют алгоритмы параллельных вычислений, посредством которых производят в режиме реального времени обработку одновременно нескольких изображений, получаемых через две видеокамеры, и при этом управляют работой мобильного робота, в частности, управляют перемещениями руки робота, запястья робота и захватного устройства.
При этом учитывают то, что при осуществлении прыжка мобильного робота этот мобильный робот может отклониться от расчетной траектории перемещения. Для того, чтобы осуществить захват на лету за держатель при возможном отклонении этого мобильного робота от расчетной траектории перемещения, выполняют следующую совокупность действий В1, предназначенную для осуществления захвата на лету за этот держатель, посредством реализации параллельных вычислений, и посредством автоматического функционирования мобильного робота, в режиме реального времени. При этом начало выполнения совокупности действий В1 совпадает с расчетным моментом отрыва мобильного робота от пола помещения склада. При этом учитывают то, что в случае, если захват на лету за держатель не осуществлен посредством мобильного робота в течение, например, 10 с после отрыва мобильного робота от пола помещения склада, то осуществить захват на лету за этот держатель, посредством автоматического функционирования мобильного робота при этих обстоятельствах невозможно.
Совокупность действий В1 (ее описание состоит из описаний шагов 1-2) следующая:
Шаг 1. На бортовом компьютере мобильного робота, посредством реализации параллельных вычислений, осуществляют локализацию мобильного робота и определяют параметры расположения захватного устройства мобильного робота относительно глобальной системы координат. На этом завершают шаг 1 и приступают к выполнению шага 2.
Шаг 2. С помощью специальных программ, определяют, принадлежит ли расположение захватного устройства мобильного робота (определенное на шаге 1) множеству расчетных расположений захватного устройства мобильного робота в момент перед закрытием этого захватного устройства, таких, что при закрытии этого захватного устройства при этих расположениях захватного устройства возможно осуществление надежного захвата без проскальзывания за этот держатель, и если принадлежит, то осуществляют захват без проскальзывания за держатель посредством мгновенного закрытия захватного устройства мобильного робота, и осуществляют выход из этого цикла из двух шагов 1-2, прекращая все действия, описанные в шагах 1-2, и прекращая все действия, описанные в совокупности действий В1. В случае, если расположение захватного устройства мобильного робота (определенное на шаге 1) не принадлежит множеству расчетных расположений захватного устройства мобильного робота в момент перед закрытием этого захватного устройства, таких, что при закрытии этого захватного устройства при этих расположениях захватного устройства возможно осуществление надежного захвата без проскальзывания за этот держатель, то далее выполняют следующие действия. Определяют текущий момент времени Н. Выполняют сравнение расчетного момента отрыва мобильного робота от пола помещения склада с моментом времени Н, и если расчетный момент отрыва мобильного робота от пола помещения склада отличается от момента времени Н на величину, не меньшую 10 с, то передают на компьютер пункта управления от бортового компьютера мобильного робота (через беспроводную локальную компьютерную сеть на основе технологии Wi-Fi) сообщение о неудачной попытке захвата на лету за держатель, и осуществляют выход из этого цикла из двух шагов 1-2, прекращая все действия, описанные в шагах 1-2, и прекращая все действия, описанные в совокупности действий В1. Если расчетный момент отрыва мобильного робота от пола помещения склада отличается от момента времени Н на величину, меньшую 10 с, то завершают выполнение шага 2 и переходят на шаг 1. На этом описание совокупности действий В1 завершено.
Таким образом, осуществляют прыжок мобильного робота и захват на лету за держатель посредством автоматического функционирования этого мобильного робота. После осуществления захвата на лету без проскальзывания за держатель посредством захватного устройства мобильного робота, приводят в действие все запирающие устройства, расположенные в этом захватном устройстве. Затем осуществляют одновременное перемещение (за счет осуществления работы транспортной подвески), относительно этой мобильной платформы, всех колес этой мобильной платформы с одинаковой скоростью, с одинаковым ускорением и на минимально возможное расстояние до днища этой мобильной платформы, перпендикулярно нижней плоскости днища этой мобильной платформы, в сторону к этой мобильной платформе. После этого осуществляют расположение руки мобильного робота (с сохранением расположения захватного устройства), посредством приведения в действие приводов вращательных шарниров, установленных в этой руке мобильного робота, при котором не менее, чем в три раза сокращают расстояние от центральной точки запястья робота, на котором установлено захватное устройство, до мобильной платформы. Затем дополнительно приводят в действие запирающие устройства, расположенные в руке робота, которые на этот момент еще не приведены в действие. Затем выключают только такие запирающие устройства, которые используют для блокирования вращательного шарнира, посредством которого рука робота соединена с запястьем робота. После этого осуществляют поворот вращательного шарнира (посредством приведения в действие привода этого вращательного шарнира), посредством которого рука робота соединена с запястьем робота, на угол не менее 30 градусов и не более 60 градусов, при этом поворот вращательного шарнира осуществляют так, чтобы мобильная платформа перемещалась в сторону к стеллажу. Предварительно угол поворота этого вращательного шарнира определяют экспериментально так, чтобы после осуществления этого поворота элементы мобильного робота не задевали за ограничитель хода при осуществлении расположения руки мобильного робота, при котором не менее, чем в три раза увеличивают расстояние от центральной точки запястья робота, на котором установлено захватное устройство, до мобильной платформы. Затем приводят в действие запирающие устройства, используемые для блокирования вращательного шарнира, посредством которого рука робота соединена с запястьем робота, и при этом выключают все остальные запирающие устройства, расположенные в руке робота, и осуществляют расположение руки мобильного робота (с сохранением расположения захватного устройства), посредством приведения в действие приводов вращательных шарниров, установленных в этой руке мобильного робота, при котором не менее, чем в три раза увеличивают расстояние от центральной точки запястья робота, на котором установлено захватное устройство, до мобильной платформы. В результате этих действий мобильная платформа располагается над полкой верхнего яруса стеллажа. Затем снова приводят в действие запирающие устройства, расположенные в руке робота, которые на этот момент не приведены в действие. Затем открывают захватное устройство мобильного робота. В результате этих действий мобильная платформа под действием силы тяжести опускается на полку верхнего яруса стеллажа. При этом ограничитель хода, установленный на верхнем ярусе этого стеллажа, препятствует опрокидыванию и падению этого мобильного робота на пол помещения слада. На этом перемещение этого мобильного робота на полку верхнего яруса стеллажа, установленного в зоне хранения склада, завершают.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в обеспечении перемещения мобильного робота на полку верхнего яруса стеллажа, установленного на складе.
Этот технический результат заявленного способа перемещения мобильного робота на складе достигается тем, что перемещение мобильного робота на полку верхнего яруса стеллажа осуществляют посредством осуществления прыжка этого мобильного робота с последующим захватом на лету за держатель (установленный на верхнем ярусе этого стеллажа) захватным устройством, установленным на руке мобильного робота, и посредством последующего осуществления расположения мобильной платформы мобильного робота на полке верхнего яруса стеллажа за счет приведения в действие приводов вращательных шарниров, установленных в руке этого мобильного робота, и при этом полка верхнего яруса этого стеллажа расположена на высоте, превышающей сумму трех величин: высоты корпуса мобильной платформы, длины руки мобильного робота, на которой установлено захватное устройство, и максимального расстояния, на котором возможно одновременно расположить центры всех колес мобильной платформы от нижней поверхности днища мобильной платформы, за счет осуществления работы электронно-управляемой регулируемой по высоте транспортной подвески.
Краткое описание чертежей
На фигурах схематично изображено:
Фигура 1: вид мобильного робота.
Фигура 2: вид стеллажа.
Фигура 3: вид сбоку мобильного робота в момент перед началом осуществления прыжка.
Фигура 4: вид сбоку мобильного робота в момент после захвата за держатель посредством захватного устройства.
Фигура 5: вид сбоку мобильного робота в момент перед началом осуществления поворота вращательного шарнира, посредством которого рука робота соединена с запястьем робота.
Фигура 6: вид сбоку мобильного робота в момент после осуществления поворота вращательного шарнира, посредством которого рука робота соединена с запястьем робота.
Фигура 7: вид сбоку мобильного робота в момент перед открытием захватного устройства.
Фигура 8: вид сбоку мобильного робота в момент после перемещения этого мобильного робота на полку верхнего яруса стеллажа.
Фигура 9: план склада.
На фигурах цифрами обозначены: 1 - мобильный робот, 2 - мобильная платформа, 3 - захватное устройство, 4 - запястье робота, предназначенное для установки захватного устройства, 5 - рука робота, предназначенная для установки захватного устройства, 6 - бортовой компьютер, 7 - устройство хранения информации, подключенное к бортовому компьютеру, 8 - сетевое оборудование, подключенное к бортовому компьютеру, 9 - источник энергии, 10 - видеокамера, 11 - рука робота, предназначенная для установки видеокамеры, 12 - колесо, 13 - элемент транспортной подвески, к которому прикреплено колесо, 14 - вращательный шарнир, посредством которого рука робота соединена с запястьем робота, на котором установлено захватное устройство, 15 - стеллаж, 16 - полка нижнего яруса стеллажа, 17 - полка верхнего яруса стеллажа, 18 - тарно-штучный груз, 19 - ограничитель хода, 20 - держатель, 21 - пол помещения склада, 22 - пункт управления, 23 - компьютер пункта управления, 24 - устройство хранения информации, подключенное к компьютеру пункта управления, 25 - сетевое оборудование, подключенное к компьютеру пункта управления, 26 - устройство ввода, подключенное к компьютеру пункта управления, 27 - проезд, предназначенный для перемещений мобильного робота, 28 - линия возможных перемещений мобильной платформы мобильного робота, 29 - проекция на плоскость OXY глобальной системы координат начала системы координат мобильной платформы мобильного робота в начальном расположении, которое соответствуют началу фазы разгона мобильного робота при осуществлении перемещения мобильного робота на полку верхнего яруса стеллажа, 30 - зона хранения.
Осуществление изобретения
Изобретением является новый способ перемещения мобильного робота на складе. Заявленный способ предназначен для осуществления перемещения мобильного робота на полку верхнего яруса стеллажа, установленного в зоне хранения склада. Мобильный робот 1 перемещают на полку 17 верхнего яруса стеллажа 15 посредством осуществления прыжка этого мобильного робота 1 с последующим захватом на лету без проскальзывания захватным устройством 3 (установленным на руке 5 этого мобильного робота 1) за держатель 20, установленный на верхнем ярусе этого стеллажа 15, и посредством последующего осуществления расположения мобильной платформы 2 этого мобильного робота 1 на полке 17 верхнего яруса этого стеллажа 15 за счет приведения в действие приводов вращательных шарниров, установленных в руке этого мобильного робота. После перемещения на полку 17 верхнего яруса стеллажа 15 мобильный робот 1 используют, например, для инвентаризации и перемещения грузов 18, размещенных на верхнем ярусе этого стеллажа 15.
Для реализации заявленного изобретения используют мобильный робот 1, который является шарнирным роботом, содержащим вращательные и сферические шарниры.
Мобильный робот 1 содержит:
- мобильную платформу 2, на которой размещают все остальные элементы мобильного робота 1, содержащую всенаправленный мобильный механизм колесного типа, содержащий тормозную систему, и при этом мобильная платформа 2 содержит корпус мобильной платформы 2;
- бортовой компьютер 6 с подключенным устройством хранения информации 7;
- сетевое оборудование 8, предназначенное для подключения бортового компьютера 6 в качестве узла компьютерной сети к беспроводной локальной компьютерной сети на основе технологии Wi-Fi;
- руку 5 робота, запястье 4 робота, установленное на этой руке 5 робота, и рабочий орган робота, который является захватным устройством 3, установленным на этом запястье 4 робота, при этом рука 5 робота и запястье 4 робота соединены вращательным шарниром 14;
- две руки 11 робота, два запястья робота, которые установлены по одному на каждой из этих рук 11 робота, и предназначены для установки на каждом из них по одной видеокамере 10;
- две видеокамеры 10, установленные на запястьях робота, при этом каждая видеокамера 10 размещена на отдельном запястье робота, с помощью которого эту видеокамеру 10 позиционируют и ориентируют;
- источник энергии 9, предназначенный для обеспечения нормальной работы всех элементов мобильного робота 1.
Каждая видеокамера 10 установлена с возможностью получения в режиме реального времени не менее 1000 изображений в секунду, с разрешением не менее 1024×1024 пикселей.
Пол 21 помещения склада сделан так, что верхняя плоскость пола 21 помещения склада выполнена в виде ровной плоской горизонтальной сплошной поверхности. Использована мобильная платформа 2 с возможностью перемещения по ровной плоской сплошной горизонтальной поверхности со скоростью до 5 км/ч, и которая, например, имеет массу 4 кг. Корпус мобильной платформы 2 содержит днище мобильной платформы 2, при этом нижняя плоскость днища мобильной платформы 2 мобильного робота 1 изготовлена в виде жесткой плоской поверхности. Мобильный робот 1, например, имеет массу 8 кг. При этом длина и ширина мобильной платформы 2 составляют 50 см. Высота корпуса мобильной платформы 2 составляет 20 см. Верхняя часть мобильной платформы 2 представляет собой ровную плоскую горизонтальную поверхность. Мобильная платформа 2 содержит всенаправленный мобильный механизм, содержащий соответствующую совокупность приводов, блоков управления приводами и проприоцептивных датчиков, которые являются энкодерами.
Все руки 5, 11 робота, все запястья, установленные на руках 11 робота, запястье 4 робота, захватное устройство 3 содержат соответствующую совокупность запирающих устройств, посредством которых блокируют все шарниры, которые содержат все руки 5, 11 робота, все запястья, установленные на руках 11 робота, запястье 4 робота, захватное устройство 3.
Все руки 5, 11 робота, все запястья, установленные на руках 11 робота, запястье 4 робота, захватное устройство 3 содержат соответствующую совокупность проприоцептивных датчиков, приводов и блоков управления приводами.
Руку 5 мобильного робота выбирают так, что длина этой руки 5 составляет, например, величину, равную утроенной сумме следующих двух величин: высоты корпуса мобильной платформы 2 и минимального расстояния, на котором возможно одновременно расположить центры всех колес 12 мобильной платформы 2 от нижней поверхности днища мобильной платформы 2, за счет осуществления работы электронно-управляемой регулируемой по высоте транспортной подвески.
Количество степеней свободы каждой руки 5, 11 робота - не менее 7, при этом максимальная угловая скорость индивидуальных соединений каждой руки 5, 11 робота - не менее 1200 градусов в секунду, длина руки 5 робота - 90 см, длина каждой руки 11 робота - 20 см. Максимальная угловая скорость индивидуальных соединений захватного устройства 3 - не менее 1200 градусов в секунду, усилие удержания предмета захватным устройством 3 - более 500 Н.
Каждый привод, каждый блок управления приводом, каждый проприоцептивный датчик установлены и подключены к источнику энергии 9, размещенному на мобильной платформе 2. Каждый привод установлен с возможностью осуществления управления этим приводом посредством блока управления приводом. Каждый блок управления приводом установлен с возможностью получения сигналов от бортового компьютера 6, представляющих параметры режимов работы привода, и с возможностью управления работой привода, в соответствии с получаемыми сигналами. Каждый проприоцептивный датчик установлен с возможностью передачи на бортовой компьютер 6 сигнала, представляющего результаты работы соответствующего привода, включенного в состав всенаправленного мобильного механизма, рук 5, 11 робота, двух запястий, установленных на руках 11 робота, запястья 4 робота, захватного устройства 3.
Бортовой компьютер 6 с подключенным устройством хранения информации 7 установлен на мобильной платформе 2, при этом к бортовому компьютеру 6 подключен всенаправленный мобильный механизм, рука 5 робота, запястье 4 робота, захватное устройство 3, и к этому бортовому компьютеру 6 подключены две руки 11 робота, два запястья робота, которые установлены по одному на каждой из этих рук 11 робота, две видеокамеры 10, установленные на этих запястьях робота, по одной на каждом из этих запястий. При этом подключение к бортовому компьютеру 6 всенаправленного мобильного механизма, рук 5, 11 робота, двух запястий, установленных на руках 11 робота, запястья 4 робота, захватного устройства 3 осуществлено посредством подключения к бортовому компьютеру всех проприоцептивных датчиков и всех блоков управления приводами, которые содержат всенаправленный мобильный механизм, руки 5, 11 робота, два запястья, установленные на руках 11 робота, запястье робота 4 и захватное устройство 3. Бортовой компьютер 6 установлен с возможностью передавать каждому блоку управления приводом сигналы, представляющие параметры режимов работы этого привода. Бортовой компьютер 6 и подключенное к нему устройство хранения информации 7 подключены к источнику энергии 9, размещенному на мобильной платформе 2. К бортовому компьютеру 6 подключены две видеокамеры 10, установленные на запястьях робота, установленных на руках 11 робота, с возможностью получения на бортовом компьютере 6 изображений через эти две видеокамеры 10. Каждая видеокамера 10 жестко прикреплена к соответствующему запястью робота, установленному на руке 11 робота. Каждую видеокамеру 10 позиционируют и ориентируют посредством передачи сигналов, представляющих параметры режимов работы приводов руки 11 робота и приводов запястья робота, установленного на руке 11 робота, от бортового компьютера 6 на блоки управления приводами руки 11 робота и на блоки управления приводами запястья робота, установленного на руке 11 робота, и посредством осуществления работы приводов в этих режимах.
На мобильной платформе 2 установлено сетевое оборудование 8, которое подключено к бортовому компьютеру 6 и к источнику энергии 9, размещенному на мобильной платформе 2, и которое установлено с возможностью подключения бортового компьютера 6, посредством этого сетевого оборудования 8, в качестве узла компьютерной сети к беспроводной локальной компьютерной сети на основе технологии Wi-Fi.
На мобильной платформе 2 установлен источник энергии 9, предназначенный для обеспечения нормальной работы всех элементов мобильного робота 1, к которому подключены бортовой компьютер 6, устройство хранения информации 7, две видеокамеры, всенаправленный мобильный механизм мобильной платформы 2, три руки робота 5, 11, два запястья, установленные на руках 11 робота, запястье 4 робота, захватное устройство 3, все приводы, все блоки управления приводами, все проприоцептивные датчики, установленные в этих руках 5, 11 робота, двух запястьях, установленных на руках 11 робота, запястье 4 робота, захватном устройстве 3 и всенаправленном мобильном механизме, и подключено сетевое оборудование 8, предназначенное для подключения бортового компьютера 6, в качестве узла компьютерной сети, к беспроводной локальной компьютерной сети на основе технологии Wi-Fi.
На бортовой компьютер 6 с подключенным устройством хранения информации 7 инсталлированы следующие специальные программы:
- операционная система реального времени;
- программное обеспечение встроенных систем реального времени, предназначенное для управления в режиме реального времени рукой робота, запястьем робота, захватным устройством, всенаправленным мобильным механизмом;
- программное обеспечение, предназначенное для реализации алгоритмов компьютерного зрения, в частности, для обработки в режиме реального времени изображений, распознавания определенных объектов по полученным изображениям этих объектов, определения пространственного расположения определенных объектов по полученным изображениям этих объектов, нахождения оценки скорости объекта по получаемым изображениям этого объекта, определения параметров траектории перемещения объекта в трехмерном пространстве, вычисления расстояния до объекта;
- специальные программы, посредством которых реализуют алгоритмы параллельных вычислений;
- специальную программу, посредством которой устанавливают и поддерживают системное время с осуществлением синхронизации с сервером точного времени;
- программное обеспечение, предназначенное для создания твердотельной 3D-модели объекта с возможностью задания плотностей материалов, из которых изготовлены элементы, которые содержит этот объект;
- программное обеспечение, предназначенное для вычисления центра масс объекта посредством использования твердотельной 3D-модели объекта с учетом расположения всех элементов этого объекта с заданными плотностями материалов, из которого изготовлены элементы, которые содержит этот объект.
На мобильной платформе 2 мобильного робота 1 установлена электронно-управляемая регулируемая по высоте транспортная подвеска с обеспечением независимого подвешивания каждого колеса 12 этой мобильной платформы 2. При перемещении мобильного робота 1 в рабочем режиме по горизонтальным поверхностям, нижнюю плоскость днища мобильной платформы 2 этого робота располагают параллельно верхней плоскости пола 21 помещения склада за счет осуществления работы этой электронно-управляемой регулируемой по высоте транспортной подвески. Эта подвеска установлена с возможностью увеличения и с возможностью уменьшения дорожного просвета мобильной платформы 2 мобильного робота 1. При этом увеличение дорожного просвета этой мобильной платформы 2 осуществляют за счет работы этой транспортной подвески, посредством одновременного перемещения, относительно этой мобильной платформы 2, всех колес 12 мобильной платформы 2 с одинаковой скоростью, с одинаковым ускорением и на одинаковое расстояние, перпендикулярно нижней плоскости днища этой мобильной платформы 2, в сторону от этой мобильной платформы 2. При этом уменьшение дорожного просвета этой мобильной платформы 2 осуществляют за счет работы этой транспортной подвески, посредством одновременного перемещения, относительно этой мобильной платформы 2, всех колес 12 мобильной платформы 2 с одинаковой скоростью, с одинаковым ускорением и на одинаковое расстояние, перпендикулярно нижней плоскости днища этой мобильной платформы 2, в сторону к этой мобильной платформе 2. При этом эта электронно-управляемая регулируемая по высоте транспортная подвеска подключена к бортовому компьютеру 6 мобильного робота 1 (с возможностью управления ее работой посредством этого бортового компьютера 6), и к источнику энергии 9, установленному на мобильной платформе 2 мобильного робота 1 (с возможностью обеспечения нормальной работы этой электронно-управляемой регулируемой по высоте транспортной подвески). Посредством программирования блока управления этой подвеской устанавливают максимальную высоту подъема этой мобильной платформы 2 и минимальную высоту опускания этой мобильной платформы 2. При этом максимальную высоту подъема мобильной платформы 2 устанавливают посредством задания максимального расстояния, на котором возможно одновременно расположить центры всех колес 12 этой мобильной платформы 2 (за счет осуществления работы этой транспортной подвески) от нижней поверхности днища этой мобильной платформы 2. При этом минимальную высоту опускания мобильной платформы 2 устанавливают посредством задания минимального расстояния, на котором возможно одновременно расположить центры всех колес 12 этой мобильной платформы 2 (за счет осуществления работы этой транспортной подвески) от нижней поверхности днища этой мобильной платформы 2. При этом максимальной высоты подъема мобильной платформы 2 достигают посредством одновременного перемещения (за счет осуществления работы этой транспортной подвески), относительно этой мобильной платформы 2, всех колес 12 этой мобильной платформы 2 с одинаковой скоростью, с одинаковым ускорением и на максимально возможное расстояние от днища этой мобильной платформы 2, перпендикулярно нижней плоскости днища этой мобильной платформы 2, в сторону от этой мобильной платформы 2. При этом минимальной высоты опускания мобильной платформы 2 достигают посредством одновременного перемещения (за счет осуществления работы этой транспортной подвески), относительно этой мобильной платформы 2, всех колес 12 этой мобильной платформы 2 с одинаковой скоростью, с одинаковым ускорением и на минимально возможное расстояние до днища этой мобильной платформы 2, перпендикулярно нижней плоскости днища этой мобильной платформы 2, в сторону к этой мобильной платформе 2. Управление работой этой подвески осуществляют посредством передачи сигнала, представляющего параметры режима работы этой подвески, от бортового компьютера 6 на блок управления этой подвеской. Возможны следующие режимы работы подвески: режим подъема мобильной платформы 2 мобильного робота 1 из текущего расположения за счет работы этой транспортной подвески, посредством одновременного перемещения относительно этой мобильной платформы 2, всех колес 12 мобильной платформы 2 с заданной одинаковой скоростью, с заданным одинаковым ускорением и на заданное одинаковое расстояние, перпендикулярно нижней плоскости днища этой мобильной платформы 2, в сторону от этой мобильной платформы 2, и режим опускания мобильной платформы 2 мобильного робота 1 из текущего расположения в расположение, соответствующее установленной минимальной высоте опускания мобильной платформы 2.
Минимальное расстояние, на котором возможно одновременно расположить центры всех колес 12 мобильной платформы 2 от нижней поверхности днища мобильной платформы 2, за счет осуществления работы электронно-управляемой регулируемой по высоте транспортной подвески составляет, например, 10 см. Максимальное расстояние, на котором возможно одновременно расположить центры всех колес 12 мобильной платформы 2 от нижней поверхности днища мобильной платформы 2, за счет осуществления работы электронно-управляемой регулируемой по высоте транспортной подвески составляет, например, 50 см.
Прыжок мобильного робота 1 выполняют посредством осуществления фазы разгона и фазы свободного полета мобильного робота 1. Перемещение мобильного робота 1 в фазе разгона осуществляют за счет увеличения дорожного просвета мобильной платформы 2 посредством работы транспортной подвески, посредством одновременного перемещения, относительно этой мобильной платформы 2, всех колес 12 мобильной платформы 2 с одинаковой скоростью, с одинаковым ускорением и на одинаковое расстояние, перпендикулярно нижней плоскости днища этой мобильной платформы 2, в сторону от этой мобильной платформы 2. При этом началу фазы разгона соответствует минимальная высота опускания мобильной платформы 2, и концу фазы разгона соответствует максимальная высота подъема мобильной платформы 2.
Мобильный робот 1 изготавливают с использованием специального программного обеспечения, в котором реализована возможность вычисления центра масс объекта с учетом расположения всех элементов этого объекта с заданными плотностями материалов, из которого изготовлены эти элементы. Мобильная платформа 2 содержит корпус (содержащий днище этой мобильной платформы 2), имеющий ось симметрии, которая перпендикулярна нижней плоскости днища этой мобильной платформы 2. При этом центр масс корпуса мобильной платформы 2 расположен на оси симметрии этого корпуса. При этом всенаправленный мобильный механизм содержит четыре одинаковых колеса 12 с обеспечением одинакового независимого подвешивания для каждого колеса 12. При этом эти две пары колес 12 установлены попарно симметрично относительно оси симметрии корпуса мобильной платформы 2, и при этом соответствующие элементы подвески 13, к которым прикреплены эти две пары колес 12, также установлены попарно симметрично относительно оси симметрии корпуса мобильной платформы 2. При этом перед осуществлением подъема и опускания мобильной платформы 2 две пары колес 12 располагают попарно симметрично относительно оси симметрии корпуса этой мобильной платформы 2 и включают тормозную систему мобильной платформы 2. Таким образом, при осуществлении подъема и опускания мобильной платформы 2 сохраняют попарную симметричность этих двух пар колес 12 относительно оси симметрии корпуса мобильной платформы 2, и при этом сохраняют попарную симметричность соответствующих двух пар элементов подвески 13, к которым прикреплены эти две пары колес 12. Таким образом, ось симметрии корпуса мобильной платформы 2 параллельна направлению действия силы тяжести при расположении этой мобильной платформы 2 на полу 21 помещения склада так, что центры всех колес 12 этой мобильной платформы 2 расположены одновременно на одинаковом расстоянии от нижней поверхности днища этой мобильной платформы 2.
Все элементы мобильной платформы 2 установлены так, что центр масс мобильной платформы 2 расположен на оси симметрии корпуса мобильной платформы 2 при условии попарно симметричного расположения двух пар колес 12 относительно оси симметрии корпуса мобильной платформы 2, и при условии попарно симметричного расположения соответствующих двух пар элементов подвески 13, к которым прикреплены эти две пары колес 12. Таким образом, при осуществлении подъема и опускания мобильной платформы 2 (с учетом описанных выше условий осуществления подъема и опускания мобильной платформы 2) центр масс мобильной платформы 2 находится на оси симметрии корпуса мобильной платформы 2.
На мобильную платформу 2 устанавливают все элементы мобильного робота 1 так, что при начальном расположении захватного устройства 3 в открытом положении (которое соответствует началу фазы разгона мобильного робота 1), при начальных расположениях (которые соответствуют началу фазы разгона мобильного робота 1) двух видеокамер 10, двух рук 11 робота, на которых установлены две видеокамеры 10, при одновременном расположении всех колес 12 мобильной платформы 2 на минимально возможном расстоянии от днища этой мобильной платформы 2 (что соответствует минимальной высоте опускания мобильной платформы 2), и при условии попарно симметричного расположения двух пар колес 12 относительно оси симметрии корпуса мобильной платформы 2, и при условии попарно симметричного расположения соответствующих двух пар элементов подвески 13, к которым прикреплены эти две пары колес 12, центр масс мобильного робота 1 расположен на оси симметрии корпуса мобильной платформы 2, внутри корпуса этой мобильной платформы 2.
Таким образом, при осуществлении подъема мобильной платформы 2 в фазе разгона (с учетом описанных выше условий расположений всех элементов мобильного робота 1, которые соответствуют началу фазы разгона мобильного робота 1, и условий осуществления подъема мобильной платформы 2) центр масс мобильного робота 1 находится на оси симметрии корпуса мобильной платформы 2.
В качестве помещения для склада использовано одноэтажное помещение, 100 м в ширину, 100 м в длину, 6 м в высоту, с вертикальными стенами, и при этом этот склад имеет, в частности, зону хранения 30. Освещение в помещении для склада выполняют в соответствии со стандартом: ГОСТ ИСО 8995-2002. Принципы зрительной эргономики. Освещение рабочих систем внутри помещений. - Введ. 2004-01-01. - М.: ИПК Издательство стандартов, 2003. - 32 с. В зоне хранения 30 создан проезд 27 для внутрискладских средств механизации. Мобильный робот 1 используют для проведения инвентаризации грузов в качестве внутрискладского средства механизации и в качестве подъемно-транспортного оборудования, содержащего грузозахватные приспособления. Для хранения грузов 18 используют полочные односекционные двухъярусные стеллажи 15.
Глобальная система координат OXYZ задана ортогональной, правоориентированной и задана так, что начало глобальной системы координат принадлежит верхней плоскости пола 21 помещения склада. При этом плоскость OXY содержит верхнюю горизонтальную плоскость пола 21 помещения этого склада, ось OZ направлена вертикально вверх, перпендикулярно к плоскости OXY, оси ОХ и OY принадлежат плоскости OXY и взаимно перпендикулярны. Каждая система координат каждой видеокамеры 10 задана ортогональной, правоориентированной и задана так, что единичный вектор, задающий направление третьей оси этой системы координат, расположен на оптической оси видеокамеры 10 и направлен в сторону объекта видеосъемки, и единичный вектор, задающий направление первой оси этой системы координат, перпендикулярен единичному вектору, задающему направление третьей оси этой системы координат. При этом начало системы координат видеокамеры 10 принадлежит поверхности корпуса видеокамеры 10, в точке пересечения этой поверхности и оптической оси этой видеокамеры 10. Система координат захватного устройства 3 задана ортогональной, правоориентированной и задана так, что началом системы координат захватного устройства 3 выбрана центральная точка захватного устройства 3, и заданы направления трех координатных осей этой системы координат захватного устройства 3. Система координат мобильной платформы 2 задана ортогональной, правоориентированной и задана так, что единичный вектор, задающий направление первой оси этой системы координат, направлен перпендикулярно оси симметрии корпуса мобильной платформы 2, единичный вектор, задающий направление третьей оси этой системы координат, направлен параллельно оси симметрии корпуса мобильной платформы 2, при этом началом системы координат мобильной платформы 2 выбирают исходную точку мобильной платформы 2.
Эти параметры глобальной системы координат, системы координат каждой видеокамеры 10, систему координат мобильной платформы 2, систему координат захватного устройства 3 определяют с использованием оборудования, которое содержат мобильный робот 1 и пункт управления 22, и эти параметры размещают на компьютере 23 пункта управления 22 и на бортовом компьютере 6 мобильного робота 1, на соответствующих устройствах хранения информации 7, 24.
Для мобильного робота 1 установлен отдельный проезд 27, по которому перемещают этот мобильный робот 1. Этот проезд 27 задан в виде ориентированного простого двумерного многоугольника, расположенного в плоскости OXY глобальной системы координат, посредством задания вершин простой ломаной линии, которая представляет собой границу этого многоугольника. Эта простая ломаная линия задана посредством упорядоченной последовательности чисел, которые представляют собой координаты вершин этой простой ломаной линии, вычисленные в глобальной системе координат, и которые записаны в соответствии с порядком обхода вершин этого ориентированного простого двумерного многоугольника. При этом эта упорядоченная последовательность чисел представляет собой параметры проезда 27 для мобильного робота 1. При этом ширину этого проезда 27 устанавливают не меньшей, чем утроенное значение ширины мобильной платформы 2 мобильного робота 1.
Для мобильного робота 1 создан проезд 27 в зоне хранения 30, который предназначен для перемещений мобильного робота 1. Параметры проезда 27 для мобильного робота 1 имеют, например, вид: (10, 40, 0), (90, 40, 0), (90, 80, 0), (10, 80, 0), (10, 70, 0), (80, 70, 0), (80, 50, 0), (10, 50, 0).
При этом заданы параметры линий 28 возможных перемещений мобильной платформы 2 мобильного робота 1 по проезду 27, которые предпочтительно заданы в виде ломаных линий, лежащих на плоскости OXY глобальной системы координат, которые представляют собой линии 28 возможных перемещений ортогональной проекции начала системы координат мобильной платформы 2 на плоскость OXY глобальной системы координат, при перемещениях мобильной платформы 2. При этом каждая такая ломаная линия задана в виде упорядоченной последовательности координат точек, вычисленных в глобальной системе координат, лежащих на плоскости OXY глобальной системы координат, и которые записаны в соответствии с порядком обхода вершин этой ломаной линии. При этом эта упорядоченная последовательность чисел представляет собой параметры соответствующей линии 28 возможного перемещения мобильного робота 2 по проезду 27.
Параметры линий 28 возможных перемещений мобильной платформы 2 мобильного робота 1 по проезду 27 заданы, например, посредством трех ломаных линий: ((15, 45, 0), (85, 45, 0), (85, 75, 0), (15, 75, 0)); ((15, 41, 0), (15, 49, 0)); ((15, 71, 0), (15, 79, 0)).
При этом параметры проезда 27, предназначенного для перемещения мобильного робота 1, и параметры линий 28 возможных перемещений мобильного робота 1 по проезду 27 определяют с использованием оборудования, которое содержат мобильный робот 1 и пункт управления 22, и эти параметры размещают на компьютере 23 пункта управления 22 и на бортовом компьютере 6 мобильного робота 1, на соответствующих устройствах хранения информации 7, 24.
Для осуществления складских операций на складе используют пункт управления 22. Пункт управления 22 содержит компьютер 23 с подключенным устройством ввода 26, устройством хранения информации 24, и беспроводным сетевым оборудованием 25, предназначенным для подключения этого компьютера 23 в качестве узла компьютерной сети к беспроводной локальной компьютерной сети на основе технологии Wi-Fi. Пункт управления 22 размещают в помещении склада, вне зоны хранения 30 склада и вне проезда 27, предназначенного для перемещения мобильного робота 1.
На компьютер 23 пункта управления 22 с подключенным устройством хранения информации 24 инсталлированы следующие специальные программы:
- операционная система реального времени;
- специальная программа, посредством которой устанавливают и поддерживают системное время с осуществлением синхронизации с сервером точного времени;
- специальные программы, посредством которых реализуют алгоритмы параллельных вычислений;
- программное обеспечение, предназначенное для создания твердотельной 3D-модели объекта с возможностью задания плотностей материалов, из которых изготовлены элементы, которые содержит этот объект;
- программное обеспечение, предназначенное для вычисления центра масс объекта посредством использования твердотельной 3D-модели объекта с учетом расположения всех элементов этого объекта с заданными плотностями материалов, из которого изготовлены элементы, которые содержит этот объект.
Для мобильного робота 1, с использованием взвешивания, обмера деталей и, при необходимости, с использованием стенда для определения центра масс изделий, и с использованием 3D-сканера, определяют следующие параметры, соответствующие этому мобильному роботу 1. Эти параметры определяют с применением специальных программ, посредством которых реализуют алгоритмы компьютерного зрения, с применением программного обеспечения для создания твердотельной 3D-модели объекта с возможностью задания плотностей материалов, из которых изготовлены элементы, которые содержит этот объект, и с применением программного обеспечения встроенных систем реального времени, предназначенного для управления в режиме реального времени рукой робота, запястьем робота, захватным устройством, всенаправленным мобильным механизмом, с использованием оборудования, которое содержит мобильный робот 1 и пункт управления 22, и эти параметры размещают на компьютере 23 пункта управления 22 и на бортовом компьютере 6 мобильного робота 1, на соответствующих устройствах хранения информации 7, 24. Таким образом, определяют следующие параметры, соответствующие этому мобильному роботу 1:
- параметры твердотельной трехмерной модели (по-другому называемой 3D-моделью) мобильного робота 1 с заданными плотностями материалов из которых изготовлены элементы, которые содержит этот мобильный робот 1;
- коэффициент сопротивления воздуха, определяемый свойствами среды, формой мобильного робота 1, соответствующий квадрату скорости мобильного робота 1, и соответствующий этому мобильному роботу 1, и определяемый при перемещении этого мобильного робота 1 со скоростью, не превышающей 15 м/с.
Коэффициент сопротивления воздуха К, соответствующий перемещению этого мобильного робота 1 с заданной начальной скоростью, вычислен экспериментально, например, с использованием видеозаписи прыжка мобильного робота 1 вертикально вверх.
Для хранения грузов 18 используют полочные односекционные двухъярусные стеллажи 15. Стеллажи 15 размещают в зоне хранения 30. Все полки 16, 17 этих стеллажей 15 выполнены в виде ровных плоских сплошных поверхностей, и прикреплены непосредственно к стойкам. Все полки 16, 17 каждого стеллажа 15 расположены так, что верхние плоскости полок 16, 17 расположены горизонтально при установке этого стеллажа 15 в зоне хранения 30. При этом полка 17 верхнего яруса стеллажа 15 расположена на высоте, превышающей сумму трех величин: высоты корпуса мобильной платформы 2, длины руки 5 мобильного робота 1, на которой установлено захватное устройство 3, и максимального расстояния, на котором возможно одновременно расположить центры всех колес 12 мобильной платформы 2 от нижней поверхности днища мобильной платформы 2, за счет осуществления работы электронно-управляемой регулируемой по высоте транспортной подвески.
На каждой полке 17 верхнего яруса каждого стеллажа 15 устанавливают ограничитель хода 19, посредством которого препятствуют опрокидыванию мобильного робота 1 после размещения этого мобильного робота 1 на полке 17 верхнего яруса стеллажа 15. Ограничитель хода 19 изготавливают в виде прямоугольной пластины, длиной равной длине полки 17 верхнего яруса этого стеллажа 15, шириной превышающей сумму следующих двух величин: высоту корпуса мобильной платформы 2 и минимальное расстояние, на котором возможно одновременно расположить центры всех колес 12 мобильной платформы 2 от нижней поверхности днища мобильной платформы 2, за счет осуществления работы электронно-управляемой регулируемой по высоте транспортной подвески, то есть, например, длина этого ограничителя хода 20 равна 5 м и ширина равна 0,31 м. Ограничитель хода 19 жестко прикрепляют боковой стороной к краю полки 17 верхнего яруса стеллажа вдоль всего края полки 17 верхнего яруса этого стеллажа 15 так, что ограничитель хода 19 расположен перпендикулярно к верхней плоскости полки 17 верхнего яруса этого стеллажа 15.
На каждой полке 17 верхнего яруса каждого стеллажа 15 устанавливают держатель 20. Держатель 20 состоит из стержня и двух опор, посредством которых этот стержень располагают так, что продольная ось этого стержня расположена параллельно верхней плоскости полки 17 верхнего яруса этого стеллажа 15, при этом стержень жестко прикрепляют к опорам, и опоры жестко прикрепляют к краю полки 17 верхнего яруса этого стеллажа 15. Каждая опора имеет Г-образный вид. Длина стержня равна длине полки 17 верхнего яруса этого стеллажа 15. Диаметр этого стержня определяют экспериментально так, чтобы можно было осуществить надежный захват без проскальзывания за этот стержень захватным устройством 3, установленным на руке 5 мобильного робота 1, например, диаметр этого стержня равен 5 см. Этот стержень имеет шероховатую поверхность. При этом коэффициент трения покоя и коэффициент трения скольжения между материалами, из которых сделаны поверхности этого стержня и контактные поверхности захватного устройства, превышают значение 0,5. Стержень, посредством двух опор, располагают так, что расстояние по горизонтали от этого стержня до края полки 17 верхнего яруса стеллажа 15 превышает половину длины корпуса мобильной платформы 2, то есть, например, равно 30 см. Расстояние по вертикали от этого стержня до края полки 17 верхнего яруса стеллажа 15 составляет, например, 0,9 величины, равной сумме следующих трех величин: высоты корпуса мобильной платформы 2, длины руки 5 мобильного робота 1, и минимального расстояния, на котором возможно одновременно расположить центры всех колес 12 мобильной платформы 2 от нижней поверхности днища мобильной платформы 2, за счет осуществления работы электронно-управляемой регулируемой по высоте транспортной подвески, то есть составляет 108 см.
Для каждого стеллажа 15 определяют параметры, соответствующие этому стеллажу 15, посредством обмера этого стеллажа 15, с использованием специальных программ, посредством которых реализуют алгоритмы компьютерного зрения, и специального оборудования, в частности, например, с использованием 3D-сканера, при этом эти параметры определяют с использованием оборудования, которое содержит мобильный робот 1 и пункт управления 22, и с использованием специальных программ, предназначенных для управления в режиме реального времени рукой робота, запястьем робота, захватным устройством, всенаправленным мобильным механизмом. Таким образом, для каждого стеллажа 15 определяют следующие параметры, соответствующие этому стеллажу 15 (в пунктах от (а) до (г)), и эти параметры размещают на компьютере 23 пункта управления 22 и на бортовом компьютере 6 мобильного робота 1, на соответствующих устройствах хранения информации 7, 24:
(а) адрес стеллажа 15, по которому однозначно определяют этот стеллаж 15 на этом складе, например, адрес этого стеллажа 15 имеет вид: 5;
(б) параметры 3D-модели держателя 20, установленного на этом стеллаже 15, вычисленные в глобальной системе координат;
(в) координаты четырех точек, принадлежащих верхней плоскости полки 17 верхнего яруса этого стеллажа 15, вычисленные в глобальной системе координат, которые задают прямоугольник, который задает место размещения мобильного робота 1 после перемещения этого мобильного робота 1 на полку 17 верхнего яруса этого стеллажа 15, например, задают следующую упорядоченную последовательность чисел: (10, 30, 2), (15, 30, 2), (15, 40, 2), (10, 40, 2);
(г) параметры ограничителя хода 20, установленного на верхнем ярусе этого стеллажа 15, то есть длину этого ограничителя хода 20, равную 5 м и ширину, равную 0,31 м.
Для мобильного робота 1 и для каждого стеллажа 15, с помощью специальных программ, определяют следующие параметры, соответствующие перемещению мобильного робота 1 на полку 17 верхнего яруса этого стеллажа 15, и эти параметры определяют с использованием оборудования, которое содержит мобильный робот 1 и пункт управления 22, и эти параметры размещают на компьютере 23 пункта управления 22 и на бортовом компьютере 6 мобильного робота 1, на соответствующих устройствах хранения информации 7, 24:
- параметры начального расчетного расположения мобильной платформы 2 мобильного робота 1, которые соответствуют началу фазы разгона мобильного робота 1 при осуществлении прыжка этого мобильного робота 1, то есть координаты начала системы координат (для которого определена проекция 29 на плоскость OXY) мобильной платформы 2 мобильного робота 1, вычисленные в глобальной системе координат, например: (15; 41; 0,5), и координаты единичных векторов первой и третьей осей системы координат мобильной платформы 2 мобильного робота 1, вычисленные в глобальной системе координат, и которые соответствуют началу фазы разгона мобильного робота 1 при осуществлении прыжка этого мобильного робота 1, например: (0, -1, 0), (0, 0, 1);
- параметры расчетных расположений (по отношению к глобальной системе координат) двух видеокамер 10, двух рук 11 робота и двух запястий робота, размещенных на мобильной платформе 2 мобильного робота 1, и на которых установлены эти две видеокамеры 10, и которые соответствуют началу фазы разгона мобильного робота 1 при осуществлении прыжка этого мобильного робота 1 (при этом центр масс мобильного робота 1 находится на оси симметрии корпуса мобильной платформы 2), при которых изображения, получаемые через эти две видеокамеры 10, содержат изображения захватного устройства 3 и держателя 20, установленного на этот стеллаж 15, и которые вычисляют экспериментально, например, с использованием 3D-сканера, с применением специальных программ, посредством которых реализуют алгоритмы компьютерного зрения, и с применением программного обеспечения встроенных систем реального времени, предназначенного для управления в режиме реального времени рукой робота, запястьем робота, захватным устройством, всенаправленным мобильным механизмом;
- параметры начального расчетного расположения захватного устройства 3 в открытом положении, запястья 4 робота и руки 5 робота, по отношению к глобальной системе координат, которые соответствуют началу фазы разгона мобильного робота 1 при осуществлении прыжка этого мобильного робота 1 (при этом центр масс мобильного робота 1 находится на оси симметрии корпуса мобильной платформы 2), и которые вычисляют экспериментально, например, с использованием 3D-сканера, с применением специальных программ, посредством которых реализуют алгоритмы компьютерного зрения;
- параметры расчетных расположений захватного устройства 3 в открытом положении, запястья 4 робота и руки 5 робота, по отношению к глобальной системе координат, которые соответствуют расчетному моменту начала осуществления закрытия захватного устройства 3 для осуществления захвата на лету за держатель 20 захватным устройством 3, то есть соответствуют завершению фазы свободного полета мобильного робота 1, и которые вычисляют экспериментально, например, с использованием 3D-сканера, с использованием видеозаписи осуществления закрытия захватного устройства 3 для осуществления захвата за держатель 20, с применением специальных программ, посредством которых реализуют алгоритмы компьютерного зрения;
- расчетные координаты (вычисленные в глобальной системе координат) точки отрыва этого мобильного робота 1 от пола 21 помещения склада, то есть расчетные координаты центра масс этого мобильного робота 1 в момент отрыва этого мобильного робота от пола помещения склада, которые соответствуют началу фазы свободного полета мобильного робота 1 при осуществлении прыжка этого мобильного робота 1, например: (15, 41, 1);
- расчетные координаты (вычисленные в глобальной системе координат) точки захвата на лету захватным устройством 3 мобильного робота 1 за держатель 20, то есть расчетные координаты центра масс этого мобильного робота 1 в расчетный момент захвата на лету захватным устройством 3 мобильного робота 1 за этот держатель 20, и которые соответствуют расчетному моменту перед закрытием этого захватного устройства 3, посредством которого осуществляют захват на лету за этот держатель 20, то есть соответствуют завершению фазы свободного полета мобильного робота 1, например: (15, 41, 2);
- параметры расчетной линии перемещения центра масс мобильного робота 1 в фазе разгона, то есть множество расчетных координат точек, представляющих собой совокупность расположений центра масс мобильного робота 1 при его перемещении в фазе разгона, включая расчетные координаты точки, в которой размещают центр масс этого мобильного робота 1 в начальном положении при начале фазы разгона, и включая расчетные координаты центра масс мобильного робота 1 в момент отрыва этого мобильного робота 1 от пола 21 помещения склада, и которые представляют собой замкнутый отрезок прямой, соединяющий точки с координатами: (15; 41; 0,3) и (15; 41; 1);
- расчетная скорость перемещения центра масс мобильного робота 1 в расчетный момент захвата на лету захватным устройством 3 этого мобильного робота 1 за этот держатель 20, например: 0,1 м/с;
- параметры расчетной траектории перемещения мобильного робота 1 в фазе свободного полета при осуществлении прыжка этого мобильного робота 1, то есть расчетные координаты центра масс мобильного робота 1 и расчетные координаты вектора скорости центра масс мобильного робота 1, вычисленные в глобальной системе координат, для множества заданных расчетных моментов времени, наступающих после расчетного момента отрыва этого мобильного робота 1 от пола 21 помещения склада при осуществлении прыжка, и расчетную длительность свободного полета мобильного робота 1, и которые вычисляют по формулам (1)-(6);
- расчетная скорость центра масс мобильного робота 1 в момент отрыва этого мобильного робота 1 от пола 21 помещения склада, которая соответствует началу фазы свободного полета мобильного робота 1 при осуществлении прыжка этого мобильного робота 1, и которую вычисляют по формуле (7) с учетом формул (1)-(6);
- расчетная скорость перемещения центров всех колес 12 мобильной платформы 2 от нижней поверхности днища этой мобильной платформы 2 в момент отрыва этого мобильного робота 1 от пола 21 помещения склада, которая соответствует началу фазы свободного полета мобильного робота 1 при осуществлении прыжка этого мобильного робота 1, и которую вычисляют по формуле (10) с учетом формул (1)-(9);
- расчетную длительность фазы разгона мобильного робота 1 при осуществлении прыжка, которая, например, равна 3 с;
- параметры режимов работы приводов транспортной подвески мобильного робота 1 при которых обеспечивают расчетную скорость (которая соответствует началу фазы свободного полета мобильного робота 1 при осуществлении прыжка этого мобильного робота 1) перемещения центров всех колес 12 мобильной платформы 2 от нижней поверхности днища этой мобильной платформы 2 в момент отрыва этого мобильного робота 1 от пола 21 помещения склада в заданный расчетный момент времени, с учетом расположения мобильной платформы 2 мобильного робота 1 при осуществлении прыжка этого мобильного робота 1, для заданного расчетного момента начала фазы разгона этого мобильного робота 1, и для заданной расчетной длительности фазы разгона этого мобильного робота 1;
- параметры множества расчетных расположений захватного устройства 3 в открытом положении в момент перед закрытием этого захватного устройства 3, таких, что при закрытии этого захватного устройства 3 при этих расположениях захватного устройства 3 возможно осуществление надежного захвата без проскальзывания за этот держатель 20, то есть соответствующее множество координат начала системы координат захватного устройства 3 в открытом положении мобильного робота 1, вычисленные в глобальной системе координат, и соответствующее множество координат единичных векторов всех трех осей системы координат захватного устройства 3 в открытом положении мобильного робота 1, вычисленные в глобальной системе координат, и которые вычисляют экспериментально, например, с использованием 3D-сканера, с применением специальных программ, посредством которых реализуют алгоритмы компьютерного зрения, и с применением программного обеспечения встроенных систем реального времени, предназначенного для управления в режиме реального времени рукой робота, запястьем робота, захватным устройством, всенаправленным мобильным механизмом.
При этом для нахождения расчетной скорости перемещения центров всех колес 12 мобильной платформы 2 от нижней поверхности днища этой мобильной платформы 2 в момент отрыва этого мобильного робота 1 от пола 21 помещения склада используют программное обеспечение для вычисления центра масс объекта посредством использования твердотельной 3D-модели объекта с учетом расположения всех элементов этого объекта с заданными плотностями материалов, из которого изготовлены элементы, которые содержит этот объект. Скорость перемещения F центров всех колес 12 мобильной платформы 2 в сторону от нижней поверхности днища этой мобильной платформы 2 в точке отрыва мобильного робота 1 при осуществлении прыжка вычисляют, с помощью специальных программ, следующим образом. При этом учитывают то, что при осуществлении подъема мобильной платформы 2 в фазе разгона (с учетом описанных выше условий расположений всех элементов мобильного робота 1, которые соответствуют началу фазы разгона мобильного робота 1, и условий осуществления подъема мобильной платформы 2 в фазе разгона) центр масс мобильного робота 1 находится на оси симметрии корпуса мобильной платформы 2, и при этом ось симметрии корпуса мобильной платформы 2 перпендикулярна верхней плоскости пола 21 помещения склада. Перемещение центра масс мобильного робота 1 в фазе разгона осуществляют за счет увеличения дорожного просвета этой мобильной платформы 2 посредством работы транспортной подвески, посредством одновременного перемещения, относительно этой мобильной платформы 2, всех колес 12 мобильной платформы 2 с одинаковой скоростью, с одинаковым ускорением и на одинаковое расстояние, перпендикулярно нижней плоскости днища этой мобильной платформы 2, в сторону от этой мобильной платформы 2. При этом началу фазы разгона соответствует минимальная высота опускания мобильной платформы 2, и концу фазы разгона соответствует максимальная высота подъема мобильной платформы 2. Высота подъема мобильной платформы в фазе разгона однозначно определена расстоянием, на котором одновременно располагают центры всех колес 12 этой мобильной платформы 2 (за счет осуществления работы этой транспортной подвески) от нижней поверхности днища этой мобильной платформы 2. Сначала определяют множество расстояний Si (для всех целых чисел i от 0 до 1000), на которых в фазе разгона одновременно располагают центры всех колес 12 мобильной платформы 2 от нижней поверхности днища этой мобильной платформы 2, которое определяют по формуле (8). При этом определяют значение S0 - минимальное расстояние, на котором в фазе разгона одновременно располагают центры всех колес 12 мобильной платформы 2 от нижней поверхности днища этой мобильной платформы 2, соответствующее минимальной высоте опускания мобильной платформы 2, и определяют значение S1000 - максимальное расстояние, на котором в фазе разгона одновременно располагают центры всех колес 12 мобильной платформы 2 от нижней поверхности днища этой мобильной платформы 2, соответствующее максимальной высоте подъема мобильной платформы 2.
Затем для каждого значения Si (для всех целых чисел i от 0 до 1000) определяют величину Ui - расстояние от центра масс мобильного робота 1 до пола 21 помещения склада, соответствующее расположению мобильного робота 1 в фазе разгона, при котором центры всех колес 12 мобильной платформы 2 в фазе разгона расположены на расстоянии Si от нижней поверхности днища этой мобильной платформы 2. При этом каждую величину Ui (для всех целых чисел i от 0 до 1000) находят с применением программного обеспечения для вычисления центра масс объекта посредством использования твердотельной 3D-модели мобильного робота 1 с учетом расположения всех элементов этого мобильного робота 1 с заданными плотностями материалов, из которого изготовлены элементы, которые содержит этот мобильный робот 1. Таким образом, по формуле (9) получают функцию W, заданную таблично для всех целых чисел i от 0 до 1000. При этом табличная функция W - это функция, посредством которой расстоянию, на котором в фазе разгона одновременно располагают центры всех колес 12 этой мобильной платформы 2 от нижней поверхности днища этой мобильной платформы 2, ставят в соответствие расстояние от центра масс мобильного робота 1 до пола 21 помещения склада.
Следовательно, расчетную скорость F перемещения центров всех колес 12 мобильной платформы 2 от нижней поверхности днища этой мобильной платформы 2 в точке отрыва мобильного робота 1 в фазе разгона определяют по формуле (10). При этом значение производной функции W при значении аргумента, равного S1000, вычисляют посредством использования методов численного дифференцирования для функции, заданной таблично.
При этом начальные расчетные расположения захватного устройства 3 в открытом положении, запястья 4 робота и руки 5 робота, которые соответствуют началу фазы разгона мобильного робота 1 при осуществлении прыжка этого мобильного робота 1, предпочтительно устанавливают так, что центральная точка запястья 3 робота расположена на расстоянии по вертикали от мобильной платформы 2, которое составляет от 2,3 до 3,3 величины, равной сумме следующих двух величин: высоты корпуса мобильной платформы 2 и минимального расстояния, на котором возможно одновременно расположить центры всех колес 12 мобильной платформы 2 от нижней поверхности днища мобильной платформы 2, за счет осуществления работы электронно-управляемой регулируемой по высоте транспортной подвески, то есть, например, составляет 93 см.
Тарно-штучные грузы 18 вручную размещают на полках 16, 17 стеллажей 15. Размещение грузов 18 на полках 16, 17 производят без свесов. Информацию об адресах стеллажей 15 размещают в компьютере 23 пункта управления 22 на устройстве хранения информации 24, с применением программирования ручного ввода данных, с использованием устройства ввода 26. Затем выполняют обмер помещения склада (вместе с содержимым этого помещения), выполняют построение трехмерной модели помещения этого склада (вместе с содержимым этого помещения) и определяют параметры этой трехмерной модели, посредством использования 3D-сканера. Информацию, которая содержит параметры этой трехмерной модели, размещают в компьютере 23 пункта управления 22 на устройстве хранения информации 24, посредством использования устройства ввода 26.
Перед началом перемещения мобильного робота 1 на складе сначала осуществляют режим работы подвески мобильной платформы 2 мобильного робота 1, посредством которого осуществляют опускание мобильной платформы 2 мобильного робота 1 из текущего расположения в расположение, соответствующее установленной минимальной высоте опускания мобильной платформы 2. Затем размещают мобильный робот 1 в проезде 27, предназначенном для перемещений этого мобильного робота 1. При этом информацию, представляющую параметры начального расположения мобильного робота 1, размещают в компьютере 23 пункта управления 22 на устройстве хранения информации 24, посредством использования устройства ввода 26. Затем осуществляют функционирование беспроводной локальной компьютерной сети на основе технологии Wi-Fi, к которой подключают, в качестве узлов компьютерной сети, компьютер 23 пункта управления 22 и бортовой компьютер 6 мобильного робота 1. При этом, с помощью специальных программ, устанавливают и непрерывно поддерживают системное время с осуществлением синхронизации с сервером точного времени на компьютере 23 пункта управления 22 и бортовом компьютере 6 мобильного робота 1, в режиме автоматического функционирования этого робота, с использованием специальных программ, посредством которых реализуют алгоритмы параллельных вычислений. При этом в качестве сервера точного времени устанавливают компьютер 23 пункта управления 22. Затем всю информацию, относящуюся к этому складу, размещенную в компьютере 23 пункта управления 22 на устройстве хранения информации 24, передают через беспроводную локальную компьютерную сеть на основе технологии Wi-Fi от компьютера 23 пункта управления 22 на бортовой компьютер 6 мобильного робота 1.
Перемещение мобильного робота 1 на складе, а именно, перемещение мобильного робота 1 на полку 17 верхнего яруса стеллажа 15 осуществляют следующим образом. На компьютере 23 пункта управления 22, с применением программирования ручного ввода данных, с использованием устройства ввода 26, вводят адрес стеллажа 15, на полку 17 верхнего яруса которого будут перемещать мобильный робот 1. Затем на компьютере 23 пункта управления 22, с помощью специальных программ, в режиме автоматического функционирования этого пункта управления 22, передают этот адрес на бортовой компьютер 6 мобильного робота 1 через беспроводную локальную компьютерную сеть на основе технологии Wi-Fi.
Затем на бортовом компьютере 6 мобильного робота 1, посредством его автоматического функционирования, через беспроводную локальную компьютерную сеть на основе технологии Wi-Fi, получают адрес стеллажа 15, на полку 17 верхнего яруса которого будут перемещать мобильный робот 1.
Затем на бортовом компьютере 6 мобильного робота 1, посредством его автоматического функционирования, определяют параметры, соответствующие этому стеллажу 15, в том числе, параметры начального расположения мобильной платформы 2 мобильного робота 1 при осуществлении прыжка этого мобильного робота 1 на верхний ярус этого стеллажа 15.
Затем на бортовом компьютере 6 мобильного робота 1, посредством его автоматического функционирования, определяют параметры линий, вдоль которых будут перемещать мобильную платформу 2 мобильного робота 1 по соответствующему проезду 27 для перемещения из текущего расположения мобильного робота 1 в начальное расположение при осуществлении прыжка мобильного робота 1 на верхний ярус этого стеллажа 15. Затем мобильный робот 1, посредством его автоматического функционирования, перемещают (по проезду 27, вдоль соответствующей линии) в начальное расположение при осуществлении прыжка мобильного робота 1 на верхний ярус этого стеллажа 15.
Перемещение мобильного робота 1 на полку 17 верхнего яруса стеллажа 15 посредством осуществления прыжка этого мобильного робота 1 осуществляют следующим образом.
Перед осуществлением прыжка сначала открывают захватное устройство 3 мобильного робота 1, посредством автоматического функционирования мобильного робота 1. Затем осуществляют расположение захватного устройства 3 в открытом положении, запястья 4 робота и руки 5 робота, которые соответствуют началу фазы разгона мобильного робота 1 при осуществлении прыжка этого мобильного робота 1.
Затем, посредством автоматического функционирования мобильного робота 1, осуществляют расположение двух видеокамер 10, посредством перемещения двух рук 11 робота и двух запястий робота, на которых размещены видеокамеры 10, так, чтобы изображения, получаемые через эти видеокамеры 10, содержали изображения захватного устройства 3 и держателя 20, который установлен на верхнем ярусе этого стеллажа 15. При этом бортовой компьютер 6 мобильного робота 1, с помощью специальных программ, настраивают, посредством автоматического функционирования мобильного робота 1, на получение изображений от двух видеокамер 10, и на обработку полученных изображений для распознавания держателя 20, захватного устройства 3 и для определения реального пространственного расположения захватного устройства 3, с помощью специальных программ, посредством которых реализуют алгоритмы компьютерного зрения. При этом все элементы мобильного робота 1 перед началом фазы разгона мобильного робота 1 (с учетом описанных выше условий расположений всех элементов мобильного робота 1, которые соответствуют началу фазы разгона мобильного робота 1, и условий осуществления подъема мобильной платформы 2 в фазе разгона), посредством автоматического функционирования мобильного робота 1, располагают так, что центр масс мобильного робота 1 находится на оси симметрии корпуса мобильной платформы 2.
Сначала на бортовом компьютере 6 мобильного робота 1, с помощью специальных программ, определяют расчетный момент начала фазы разгона мобильного робота 1 (для обеспечения прыжка этого мобильного робота 1 по расчетной траектории), и расчетный момент отрыва мобильного робота 1 от пола 21 помещения склада. Затем, в режиме автоматического функционирования мобильного робота 1, с помощью специальных программ, определяют параметры режимов работы приводов транспортной подвески мобильного робота 1, при которых обеспечивают расчетную скорость перемещения центров всех колес 12 мобильной платформы 2 перпендикулярно нижней плоскости днища мобильной платформы 2, в сторону от нижней поверхности днища этой мобильной платформы 2 в заданный расчетный момент отрыва мобильного робота 1 от пола помещения склада, для заданного расчетного момента начала фазы разгона этого мобильного робота 1, и для заданной расчетной длительности фазы разгона этого мобильного робота 1. При этом учитывают погрешность отработки траектории движения всенаправленного мобильного механизма этого мобильного робота 1. Затем осуществляют разгон этого мобильного робота 1 посредством работы транспортной подвески мобильного робота 1 в соответствии с этими определенными параметрами режимов работы приводов транспортной подвески мобильного робота 1, для заданного расчетного момента начала фазы разгона этого мобильного робота 1, и для заданной расчетной длительности фазы разгона этого мобильного робота 1, для осуществления перемещения центра масс мобильного робота 1 в фазе разгона по расчетной линии так, чтобы в заданный расчетный момент отрыва мобильного робота 1 от пола 21 помещения склада центр масс мобильного робота 1 был расположен в заданной расчетной точке отрыва мобильного робота 1 от пола 21 помещения склада, и при этом чтобы расчетная скорость центра масс мобильного робота 1 была равна заданной расчетной начальной скорости отрыва этого мобильного робота 1 от пола 21 помещения склада. В результате этих действий осуществляют прыжок мобильного робота 1.
При этом на бортовом компьютере 6 мобильного робота 1 получают изображения через две видеокамеры 10, и производят обработку полученных изображений в режиме реального времени, и распознают захватное устройство 3 и держатель 20, и определяют реальное пространственное расположение захватного устройства 3 по отношению к глобальной системе координат, с учетом времени, необходимого для получения и обработки изображений этого держателя 20 и захватного устройства 3, в частности, получают, в режиме реального времени, информацию о расположении и скорости перемещения начала системы координат захватного устройства 3 мобильного робота 1, посредством автоматического функционирования мобильного робота 1. При этом применяют специальные программы, посредством которых реализуют алгоритмы параллельных вычислений, посредством которых производят в режиме реального времени обработку одновременно нескольких изображений, получаемых через две видеокамеры 10, и при этом управляют работой мобильного робота 1, в частности, управляют перемещениями руки 5 робота, запястья 4 робота и захватного устройства 3.
При этом учитывают то, что при осуществлении прыжка мобильного робота 1 этот мобильный робот 1 может отклониться от расчетной траектории перемещения. Для того, чтобы осуществить захват на лету за держатель 20 при возможном отклонении мобильного робота 1 от расчетной траектории перемещения, выполняют следующую совокупность действий В1, предназначенную для осуществления захвата на лету за этот держатель 20, посредством реализации параллельных вычислений, и посредством автоматического функционирования мобильного робота 1, в режиме реального времени. При этом начало выполнения совокупности действий В1 совпадает с расчетным моментом отрыва мобильного робота 1 от пола 21 помещения склада. При этом учитывают то, что в случае, если захват на лету за держатель 20 не осуществлен посредством мобильного робота 1 в течение, например, 10 с после отрыва мобильного робота 1 от пола 21 помещения склада, то осуществить захват на лету за этот держатель 20, посредством автоматического функционирования мобильного робота 1 при этих обстоятельствах невозможно.
Совокупность действий В1 (ее описание состоит из описаний шагов 1-2) следующая:
Шаг 1. На бортовом компьютере 6 мобильного робота 1, посредством реализации параллельных вычислений, осуществляют локализацию мобильного робота 1 и определяют параметры расположения захватного устройства 3 мобильного робота 1 относительно глобальной системы координат. На этом завершают шаг 1 и приступают к выполнению шага 2.
Шаг 2. С помощью специальных программ, определяют, принадлежит ли расположение захватного устройства 3 мобильного робота 1 (определенное на шаге 1) множеству расчетных расположений захватного устройства 3 мобильного робота 1 в момент перед закрытием этого захватного устройства 3, таких, что при закрытии этого захватного устройства 3 при этих расположениях захватного устройства 3 возможно осуществление надежного захвата без проскальзывания за этот держатель 20, и если принадлежит, то осуществляют захват без проскальзывания за держатель 20 посредством мгновенного закрытия захватного устройства 3 мобильного робота 1 и осуществляют выход из этого цикла из двух шагов 1-2, прекращая все действия, описанные в шагах 1-2, и прекращая все действия, описанные в совокупности действий В1. В случае, если расположение захватного устройства 3 мобильного робота 1 (определенное на шаге 1) не принадлежит множеству расчетных расположений захватного устройства 3 мобильного робота 1 в момент перед закрытием этого захватного устройства 3, таких, что при закрытии этого захватного устройства 3 при этих расположениях захватного устройства 3 возможно осуществление надежного захвата без проскальзывания за этот держатель 20, то далее выполняют следующие действия. Определяют текущий момент времени Н. Выполняют сравнение расчетного момента отрыва мобильного робота 1 от пола 21 помещения склада с моментом времени Н, и если расчетный момент отрыва мобильного робота 1 от пола 21 помещения склада отличается от момента времени Н на величину, не меньшую 10 с, то передают на компьютер 23 пункта управления 22 от бортового компьютера 6 мобильного робота 1 (через беспроводную локальную компьютерную сеть на основе технологии Wi-Fi) сообщение о неудачной попытке захвата на лету за держатель 20, и осуществляют выход из этого цикла из двух шагов 1-2, прекращая все действия, описанные в шагах 1-2, и прекращая все действия, описанные в совокупности действий В1. Если расчетный момент отрыва мобильного робота 1 от пола 21 помещения склада отличается от момента времени Н на величину, меньшую 10 с, то завершают выполнение шага 2 и переходят на шаг 1. На этом описание совокупности действий В1 завершено.
Таким образом, осуществляют прыжок мобильного робота 1 и захват на лету за держатель 20 посредством автоматического функционирования этого мобильного робота 1. После осуществления захвата на лету без проскальзывания за держатель 20 посредством захватного устройства 3 мобильного робота 1, приводят в действие все запирающие устройства, расположенные в этом захватном устройстве 3. Затем осуществляют одновременное перемещение (за счет осуществления работы транспортной подвески), относительно этой мобильной платформы 2, всех колес 12 этой мобильной платформы 2 с одинаковой скоростью, с одинаковым ускорением и на минимально возможное расстояние до днища этой мобильной платформы 2, перпендикулярно нижней плоскости днища этой мобильной платформы 2, в сторону к этой мобильной платформе 2. После этого осуществляют расположение руки 5 мобильного робота 1 (с сохранением расположения захватного устройства 3), посредством приведения в действие приводов вращательных шарниров, установленных в этой руке 5 мобильного робота 1, при котором не менее, чем в три раза сокращают расстояние от центральной точки запястья 4 робота, на котором установлено захватное устройство 3, до мобильной платформы 2. Затем дополнительно приводят в действие запирающие устройства, расположенные в руке 5 робота, которые на этот момент еще не приведены в действие. Затем выключают только такие запирающие устройства, которые используют для блокирования вращательного шарнира 14, посредством которого рука 5 робота соединена с запястьем 4 робота. После этого осуществляют поворот вращательного шарнира 14 (посредством приведения в действие привода этого вращательного шарнира 14), посредством которого рука 5 робота соединена с запястьем 4 робота, на угол не менее 30 градусов и не более 60 градусов, при этом поворот вращательного шарнира 14 осуществляют так, чтобы мобильная платформа 2 перемещалась в сторону к стеллажу 15. Предварительно угол поворота этого вращательного шарнира 14 определяют экспериментально так, чтобы после осуществления этого поворота элементы мобильного робота 1 не задевали за ограничитель хода 19 при осуществлении расположения руки 5 мобильного робота 1, при котором не менее, чем в три раза увеличивают расстояние от центральной точки запястья 4 робота, на котором установлено захватное устройство 3, до мобильной платформы 2. Затем приводят в действие запирающие устройства, используемые для блокирования вращательного шарнира 14, посредством которого рука 5 робота соединена с запястьем 4 робота, и при этом выключают все остальные запирающие устройства, расположенные в руке 5 робота, и осуществляют расположение руки 5 мобильного робота 1 (с сохранением расположения захватного устройства 3), посредством приведения в действие приводов вращательных шарниров, установленных в этой руке 5 мобильного робота 1, при котором не менее, чем в три раза увеличивают расстояние от центральной точки запястья 4 робота, на котором установлено захватное устройство 3, до мобильной платформы 2. В результате этих действий мобильная платформа 2 располагается над полкой 17 верхнего яруса стеллажа 15. Затем снова приводят в действие запирающие устройства, расположенные в руке 5 робота, которые на этот момент не приведены в действие. Затем открывают захватное устройство 3 мобильного робота 1. В результате этих действий мобильная платформа 2 под действием силы тяжести опускается на полку 17 верхнего яруса стеллажа 15. При этом ограничитель хода 19, установленный на верхнем ярусе этого стеллажа 15, препятствует опрокидыванию и падению этого мобильного робота 1 на пол 21 помещения слада. На этом перемещение мобильного робота 1 на полку 17 верхнего яруса стеллажа 15, установленного в зоне хранения 30 склада, завершают.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕМЕЩЕНИЯ ГРУЗОВ НА СКЛАДЕ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2017 |
|
RU2688914C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ ТАРНО-ШТУЧНЫХ ГРУЗОВ НА СКЛАДЕ | 2018 |
|
RU2681471C1 |
| СПОСОБ ОРГАНИЗАЦИИ БЕСПРОВОДНОЙ КОМПЬЮТЕРНОЙ СЕТИ | 2016 |
|
RU2648568C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО СБОРА ТОМАТОВ | 2022 |
|
RU2796270C1 |
| СПОСОБ ОРГАНИЗАЦИИ БЕСПРОВОДНОЙ КОМПЬЮТЕРНОЙ СЕТИ В ХИМИЧЕСКОЙ СИСТЕМЕ | 2015 |
|
RU2652506C2 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ, ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО И НОСИТЕЛЬ ДАННЫХ | 2019 |
|
RU2757646C1 |
| СПОСОБ НАВЕДЕНИЯ МАШИНЫ НА ОБЪЕКТ | 2012 |
|
RU2522525C2 |
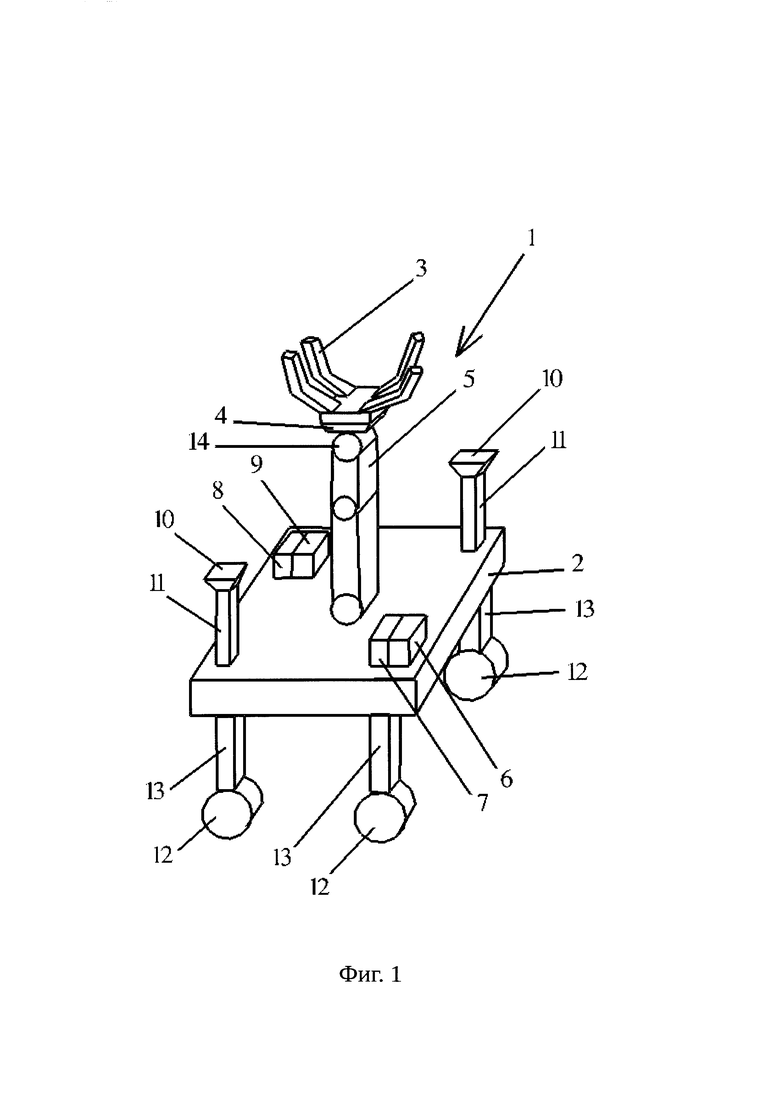
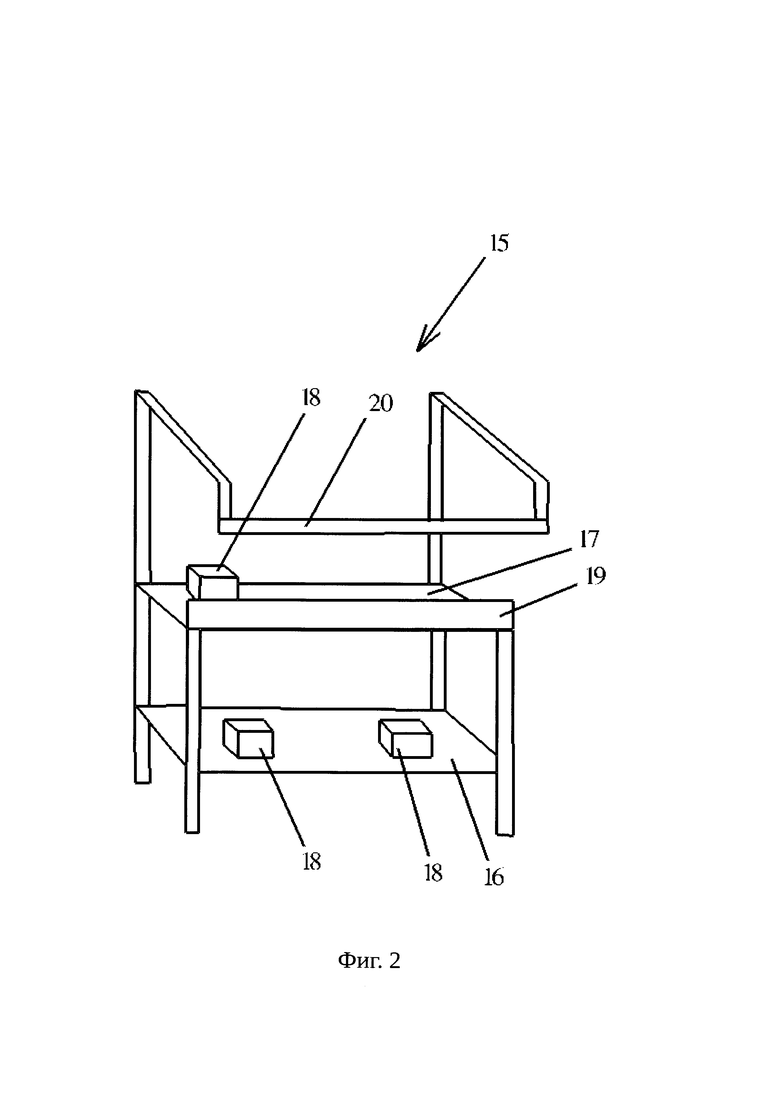
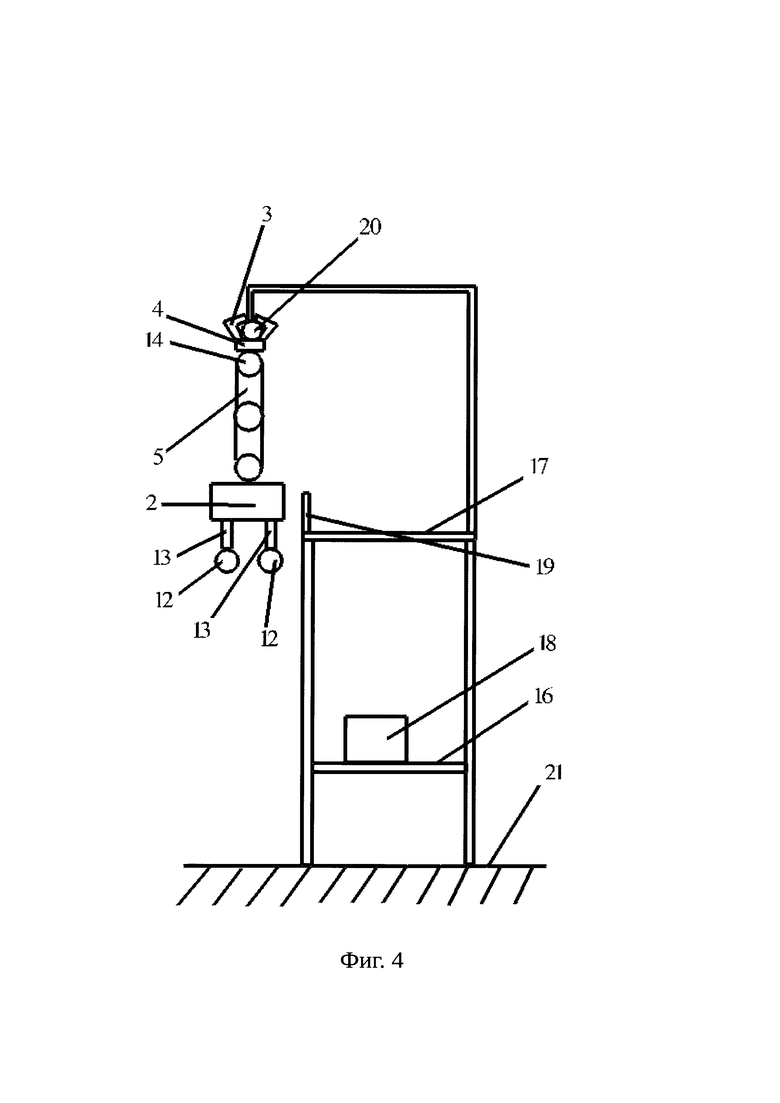
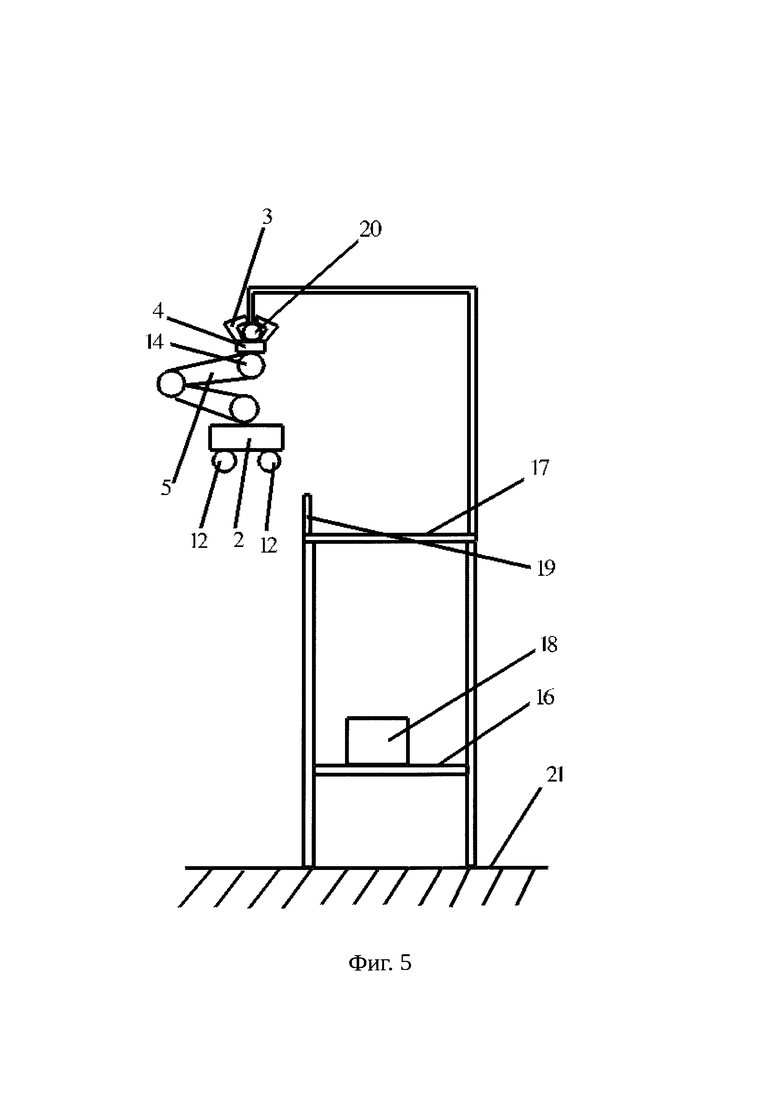
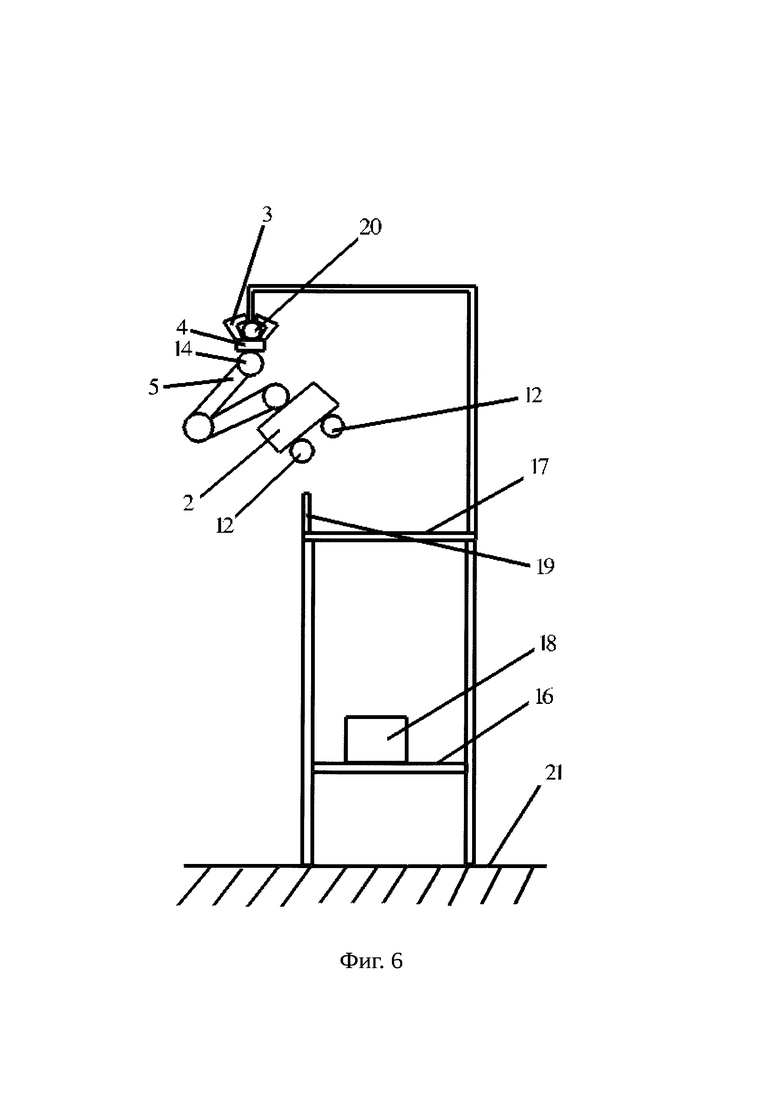
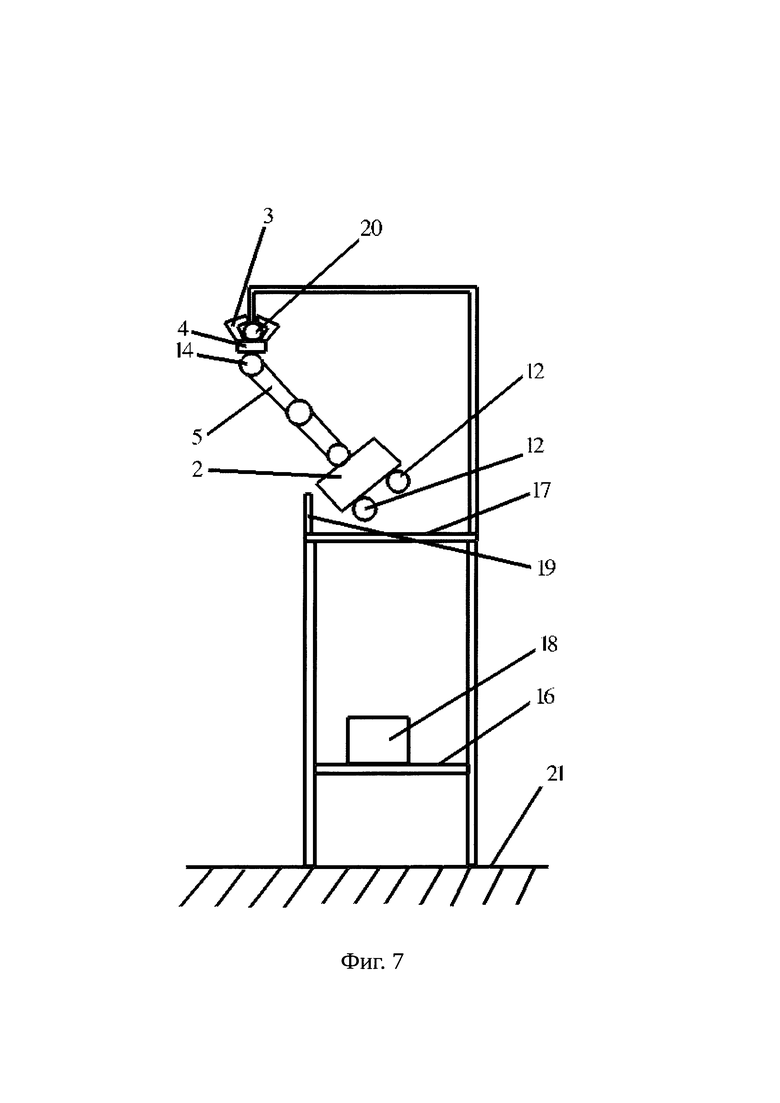
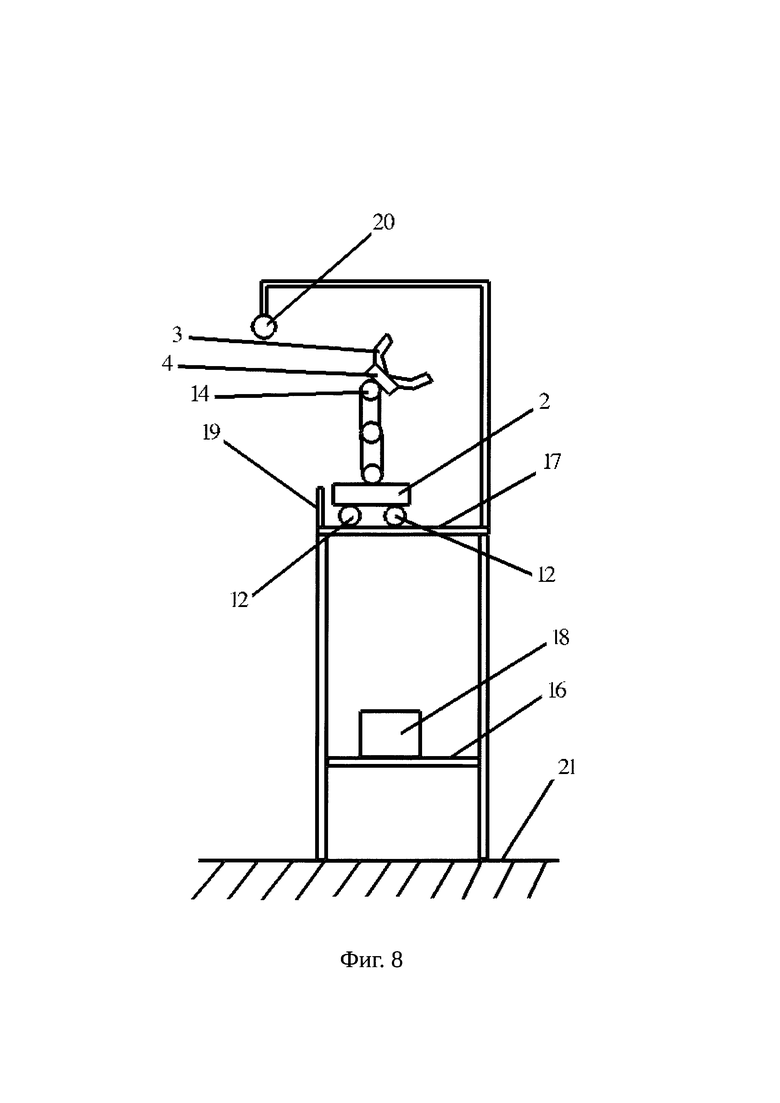
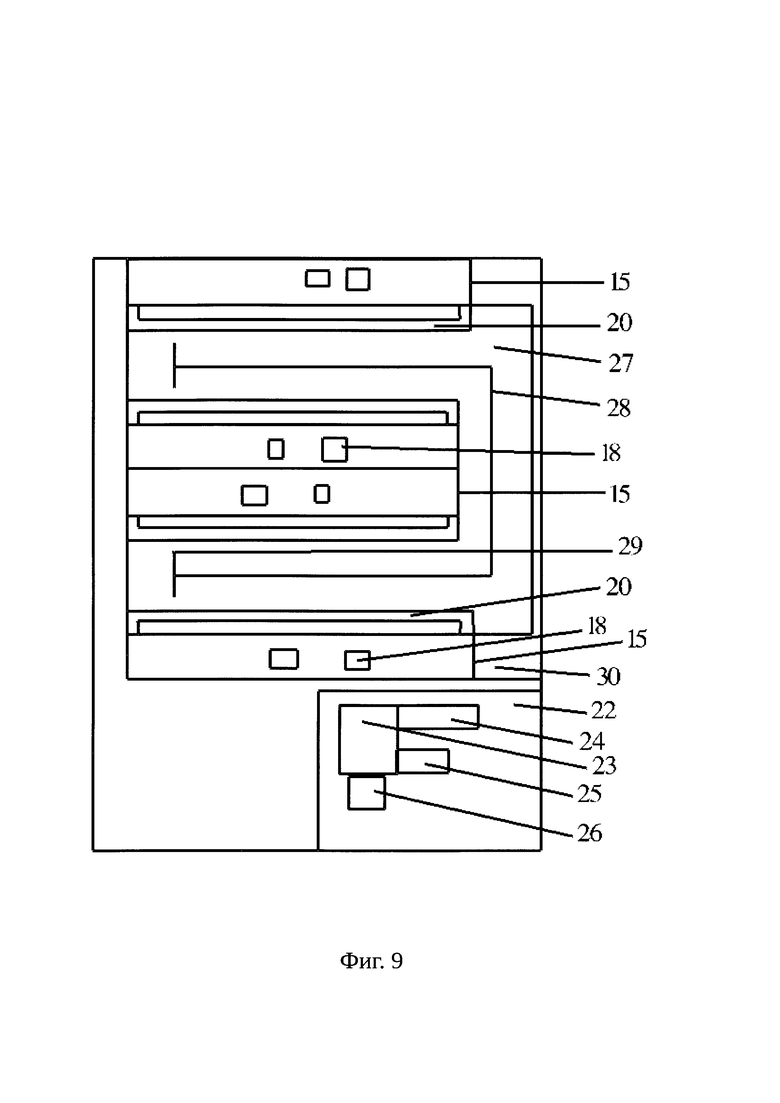
Изобретение относится к области робототехники и может быть использовано для механизации и автоматизации перемещений мобильного робота, содержащего мобильную платформу с корпусом, на которой установлены рука с захватным устройством, всенаправленный мобильный механизм колесного типа и электронно-управляемая регулируемая по высоте транспортная подвеска, в режиме его автоматического функционирования на складе, на котором установлен стеллаж с полками. Способ включает перемещение мобильного робота на полку верхнего яруса стеллажа посредством осуществления прыжка мобильного робота с последующим захватом на лету захватным устройством руки за держатель, установленный на верхнем ярусе стеллажа, и посредством последующего осуществления расположения мобильного робота на полке верхнего яруса стеллажа за счет приведения в действие приводов вращательных шарниров, установленных в руке мобильного робота. При этом прыжок мобильного робота осуществляют посредством подъема мобильной платформы мобильного робота с помощью упомянутой транспортной подвески на высоту расположения полки верхнего яруса стеллажа, превышающую сумму трех величин, включающих высоту корпуса мобильной платформы, длину руки мобильного робота с захватным устройством и максимальное расстояние, на котором возможно одновременно расположить центры всех колес мобильной платформы от нижней поверхности днища мобильной платформы. 9 ил.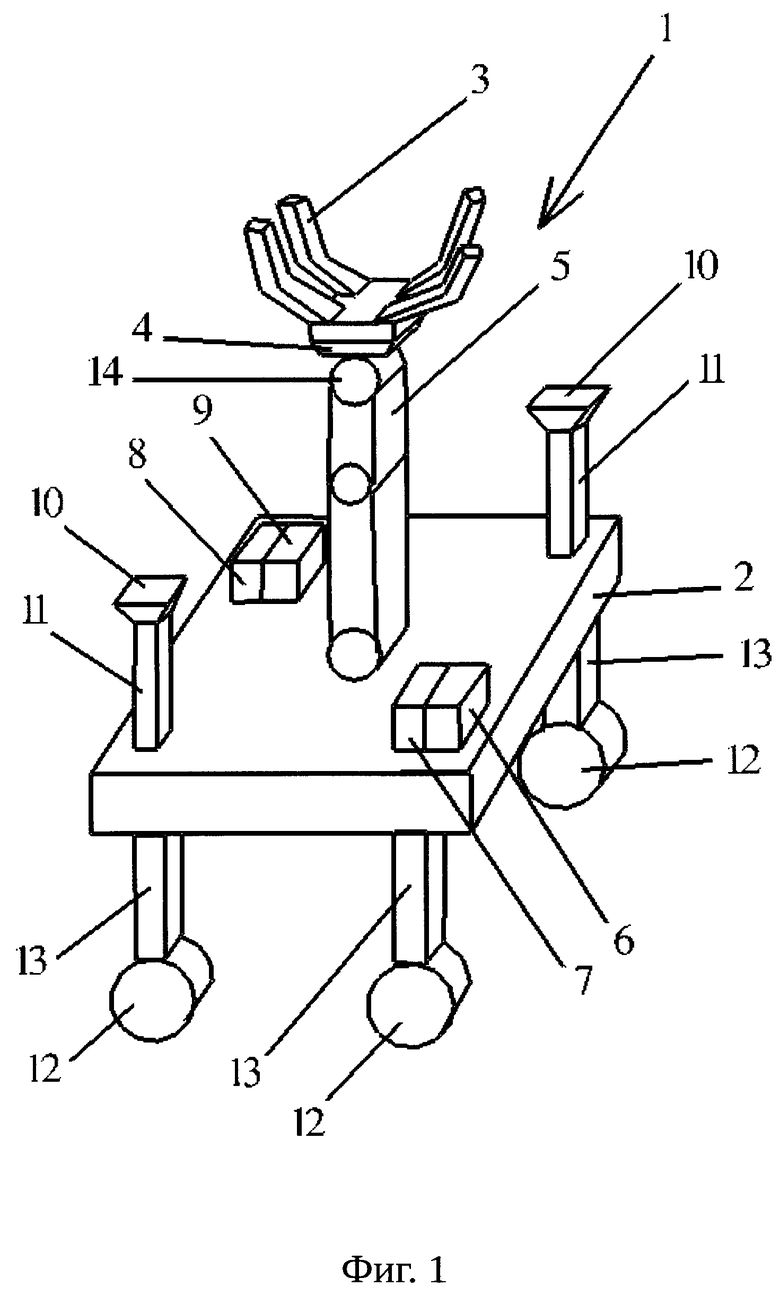
Способ перемещения мобильного робота на складе, для осуществления которого используют мобильный робот, содержащий мобильную платформу, корпус мобильной платформы, всенаправленный мобильный механизм колесного типа, электронно-управляемую регулируемую по высоте транспортную подвеску, в режиме автоматического функционирования мобильного робота, отличающийся тем, что мобильный робот перемещают на полку верхнего яруса стеллажа, установленного на складе, посредством осуществления прыжка мобильного робота с последующим захватом на лету захватным устройством, установленным на руке мобильного робота, за держатель, установленный на верхнем ярусе этого стеллажа, и посредством последующего осуществления расположения мобильного робота на полке верхнего яруса стеллажа за счет приведения в действие приводов вращательных шарниров, установленных в руке мобильного робота, при этом прыжок мобильного робота осуществляют посредством подъема мобильной платформы мобильного робота за счет работы электронно-управляемой регулируемой по высоте транспортной подвески мобильной платформы мобильного робота, и при этом полка верхнего яруса стеллажа расположена на высоте, превышающей сумму трех величин: высоты корпуса мобильной платформы, длины руки мобильного робота, на которой установлено захватное устройство, и максимального расстояния, на котором возможно одновременно расположить центры всех колес мобильной платформы от нижней поверхности днища мобильной платформы, за счет осуществления работы электронно-управляемой регулируемой по высоте транспортной подвески.
| US 20150032252 A1, 29.01.2015 | |||
| СПОСОБ ПЕРЕМЕЩЕНИЯ ГРУЗОВ НА СКЛАДЕ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2017 |
|
RU2688914C2 |
| US 20180305122 A1, 25.10.2018 | |||
| WO 2011017668 A2, 10.02.2011 | |||
| Агрегат для эмалирования труб | 1959 |
|
SU129448A1 |

