Изобретение относится к робототехнике, а именно к робототехническим комплексам, предназначенным для дистанционного управления малогабаритными судами катамаранного исполнения при решении различных задач инженерного обеспечения боевых действий войск на водной преграде с возможностью ведения инженерной разведки на прилегающей к ней местности и в береговой зоне за счет амфибийных свойств.
Известно устройство «Мобильный робототехнический комплекс» - аналог (Патент RU №2364500, МПК B25J 5/00, заявка №2007140387/02 от 31.10.2007 г., Бюл. №23 от 20.08.2009 г.), включающий мобильный робот, пост дистанционного управления, комплект дополнительного оборудования, причем мобильный робот представляет собой самоходное транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной связи с постом дистанционного управления, бортовая телевизионная система, которая включает отдельные видеоблоки, расположенные на корпусе транспортного средства и на звеньях многостепенного манипулятора, причем каждый видеоблок содержит видеокамеру, заключенную в защитный кожух с источниками подсветки, и по меньшей мере один из видеоблоков, выполняющий обзорные функции, расположен на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях, при этом на транспортном средстве укреплены манипулятор с захватным устройством и его приводы, система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления и устройствами индикации, мобильный робот дополнительно снабжен выносной системой видеонаблюдения, устройством доставки выносной системы видеонаблюдения в заданную точку местности и ее оперативного развертывания, а комплект дополнительного оборудования - раздвижную телескопическую штангу-удлинитель, с узлом вертикального крепления ее в кормовой части транспортного средства мобильного робота на одном конце и узлом крепления привода наведения видеоблока, выполняющего обзорные функции, на другом конце.
Недостатком технического устройства является сложность его применения при решении задач инженерного обеспечения боевых действий войск при подготовке и форсировании водной преграды.
Известно также техническое устройство «Роботизированная транспортная платформа», - аналог (Патент RU №2506157, МПК B25J 5/00, F41H 13/00, заявка №2012147174/02 от 06.08.2012 г., Бюл. №4 от 10.02.2014 г.), содержащая самоходное управляемое транспортное средство с приводом и бортовыми источниками электропитания, пульт дистанционного управления, систему управления движением, систему связи и передачи данных, комплект функционального оборудования, систему технического зрения, приводы исполнительных механизмов, при этом в качестве самоходного управляемого транспортного средства выбран колесный движитель повышенной проходимости с приводом от двигателя внутреннего сгорания, комплект функционального оборудования выполнен в виде боевого модуля для ведения стрельбы по различным видам целей в дневных и ночных условиях, содержащего поворотную платформу с системой наведения, блок управления и средство огневого поражения, линейные электродвигатели системы управления движением электрически связаны с сервоусилителями и механически с правым и левым рулевыми механизмами, коробкой переключения передач, рычаг газа механически связан с сервомашинкой, система управления движением дополнительно оснащена ультразвуковыми датчиками обнаружения объектов, системой топопривязки и навигации, включающей инерциальную систему ориентации в пространстве, спутниковую навигационную систему и два одометра, информационно-вычислительной системой, состоящей из двух бортовых компьютеров и магистрально-модульной платформы, для выполнения вспомогательных операций дополнительно оснащен аппаратурой для обеспечения резервной связи по каналам системы связи и передачи данных, система связи и передачи данных оснащена коммутатором и двумя маршрутизаторами для работы по основному и резервному каналам радиосвязи, сервоусилители, сервомашинка, ультразвуковые датчики обнаружения объектов системы управления движением, инерциальная система ориентации в пространстве, спутниковая навигационная система и одометры системы топопривязки и навигации, бортовая аппаратура транспортного средства - тахометр и спидометр, видеокамеры системы технического зрения по каналам информационного обмена связаны с информационно-вычислительной системой, электропитание систем осуществляется от автономного источника, установленного на транспортном средстве.
Недостатком такого технического устройства является сложность его применения для ведения инженерной разведки водной преграды при решении комплекса задач инженерного обеспечения боевых действий войск.
Известно техническое устройство «Катамаран» - прототип (Патент RU №2443592, МПК В63В 1/04, 1/12, 7/08, заявка №2008141003/11 от 15.10.2008 г., Бюл., №11 от 20.04.2010 г.), содержащий два корпуса и кормовой поплавок, связанные между собой соединительным мостом, на котором с левой и правой из сторон от кормового поплавка установлены по одному или два гребных колеса с их индивидуальными механическими приводами, при этом каждый из корпусов имеет форму обводов в плане плоско-выпуклого округлого профиля, причем корпуса расположены зеркально симметрично относительно продольной оси катамарана и навстречу друг другу плоскими сторонами, которые параллельны между собой и продольной оси, а в вертикальном сечении каждый обод имеет форму прямой линии.
Недостатками такого устройства являются низкая эффективность боевого применения при ведении инженерной разведки водной преграды из-за недостаточной маневренности, скорости, плавучести и остойчивости, отсутствия дистанционно управляемого автоматизированного оборудования, невозможности движения по суше для ведения разведки в прилегающих береговых зонах, а также обеспечения самостоятельного входа в воду и выхода из нее, погрузки (выгрузки) на грузовое транспортное средство при передислокации в новый район или на склад для хранения, технического обслуживания и ремонта.
Задачами предлагаемого технического решения являются: повышение эффективности боевого применения при ведении инженерной разведки водной преграды за счет роботизации систем управления разведывательным судном катамаранного типа; улучшения его эксплуатационных характеристик, достижения высокой плавучести и скорости движения, маневренности и остойчивости, возможности движения по суше на прилегающих береговых зонах, обеспечения самостоятельного входа в воду и выхода из нее, погрузки (выгрузки) на грузовое транспортное средство, а также использования манипулятора с захватными устройствами и отдельного подводного модуля со вспомогательным оборудованием - магнитометрическим датчиком, гидролокаторами и видеокамерами с подсветкой для увеличение количества базовых технологий работы, как в надводном, так и в подводном положениях.
Решение поставленных задач достигается тем, что в предложенной конструкции катамарана кормовой поплавок выполнен из непотопляемых герметических отсеков для силовой установки с трансмиссией и генератором, соединенных с боковыми элементами корпуса раздвижными телескопическими штангами с фиксирующими штоками, с закрепленной сверху платформой для монтажа вспомогательного оборудования, выдвижной штанги с видеокамерами кругового обзора и колпака для средств самообороны, с левой и правой стороны предусмотрены по три ведущих гребных колеса с опорными шипованными полками для движения по суше, в торцевой части установлены снизу по два реверсных гребных винта, сверху - манипулятор с видеокамерой для выполнения надводных работ, а в носовой части устроена сферообразная полость для размещения подвижного подводного разведывательного модуля с магнитометрическим датчиком, гидролокаторами переднего и боковых обзоров, видеокамерой с подсветкой и двух пар клещевых захватов, при этом техническое средство управляется оператором дистанционно со стационарного или выносного пульта управления по радиоканалам с использованием типового унифицированного комплекса электронного бортового оборудования, разработанного для беспилотных летательных аппаратов или наземных безэкипажных модулей, закрепленного как в герметических отсеках, так и непосредственно на платформе.
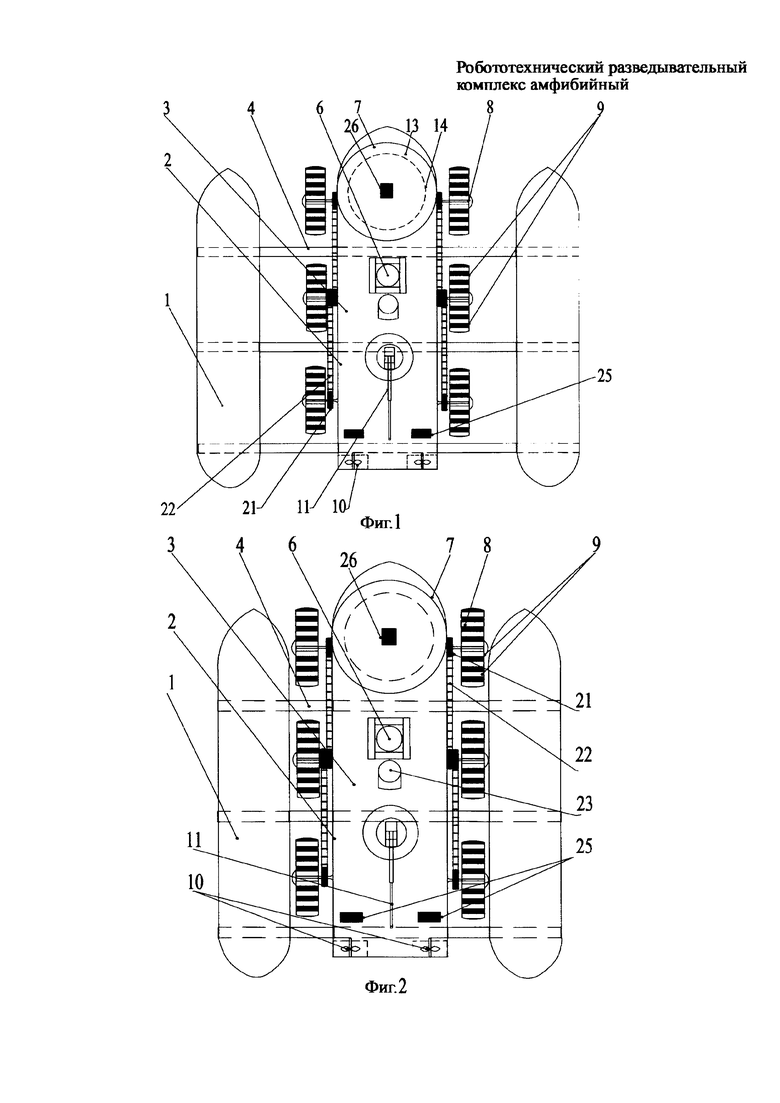
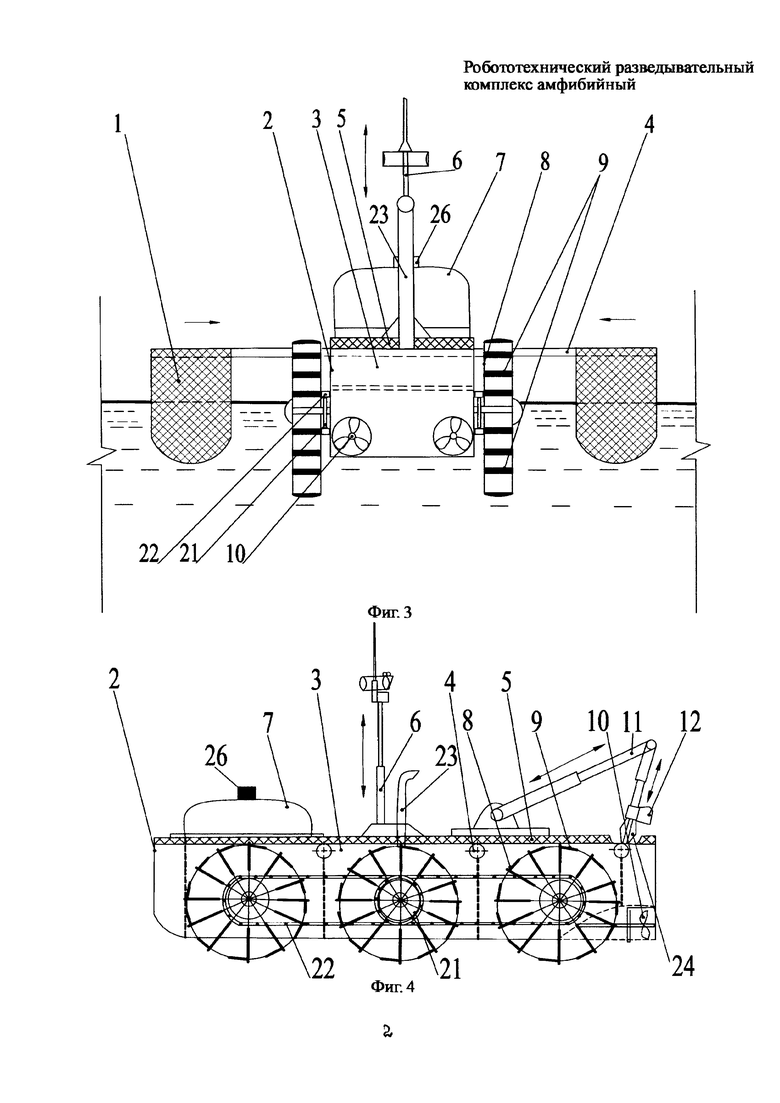
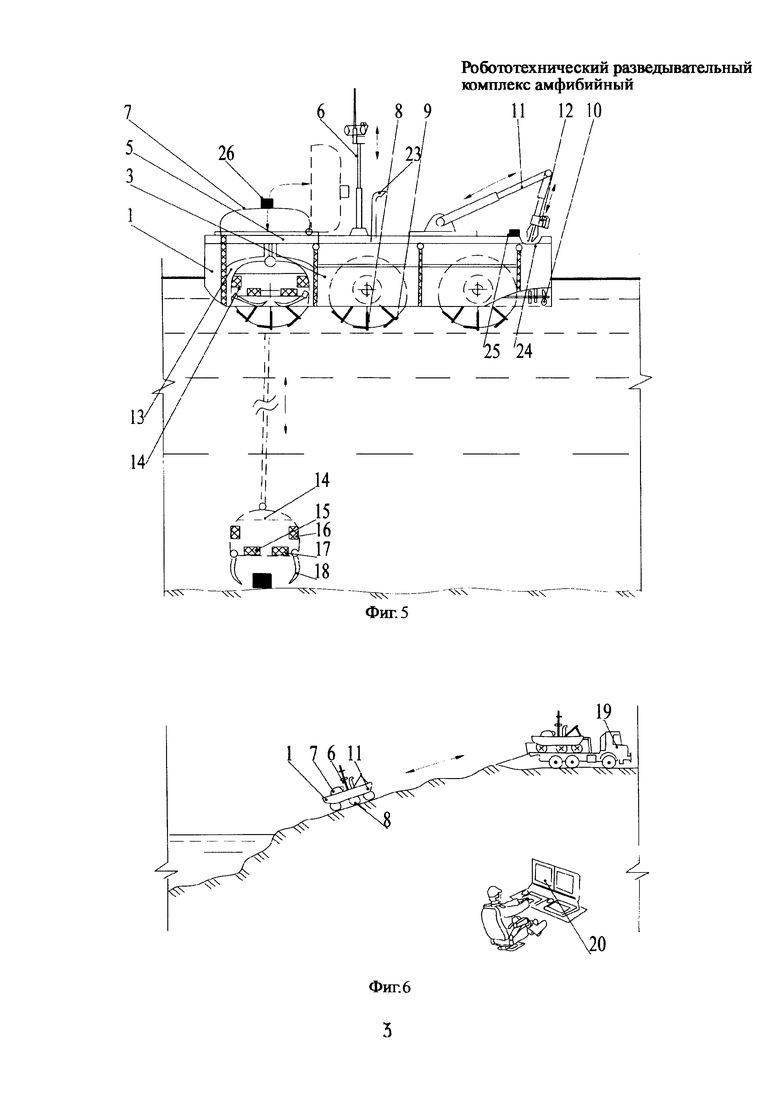
Сущность технического решения предложенного изобретения поясняется чертежами, на которых изображены: на фиг. 1 и 2 - общий вид сверху робототехнического разведывательного комплекса амфибийного в развернутом положении соответственно на воде и свернутого для движения по суше, транспортирования и хранения; на фиг. 3 и 4 показаны соответственно поперечный и продольный разрезы изделия в рабочем положении; на фиг. 5 - рабочий момент ведения разведки неизвестного объекта на участке переправы с использованием подвижного подводного разведывательного модуля и технического средства как ретранслятора; на фиг. 6 - рабочий момент доставки технического устройства к водной акватории с помощью грузового автомобиля, самостоятельной его разгрузки и входа в воду или выхода из воды для разведки береговой зоны, самостоятельной его погрузки в автомобиль при необходимости передислокации в новый район боевых действий.
Робототехнический разведывательный комплекс амфибийный (фиг. 1-6), содержащий два корпуса 1 и кормовой поплавок 2, связанные между собой, отличающийся тем, что в нем кормовой поплавок 2 выполнен из непотопляемых герметических отсеков 3 для силовой установки с трансмиссией, генератором, аккумулятором и зарядным устройством, соединенных с боковыми элементами корпуса 1, изготовленными из стеклопластика и пенопласта, раздвижными телескопическими штангами 4 с фиксирующими штоками, с закрепленной сверху платформой 5 для монтажа вспомогательного оборудования - выдвижной штанги с видеокамерами 6 кругового обзора и колпака 7 со средствами самообороны, с левой и правой стороны предусмотрены по три ведущих гребных колеса 8 с опорными шипованными полками 9 для движения по суше, в торцевой части установлены снизу по два реверсных гребных винта 10, сверху - манипулятор 11 с видеокамерой 12 для выполнения надводных работ, а в носовой части устроена сферообразная полость 13 для размещения подвижного подводного разведывательного модуля 14 с магнитометрическим датчиком 15, гидролокаторами 16 переднего и боковых обзоров, видеокамерой 17 с подсветкой и двух пар клещевых захватов 18, при этом техническое средство управляется с применением типового унифицированного комплекса электронного бортового оборудования, разработанного для беспилотных или безэкипажных модулей, закрепленного как в герметических отсека 3, так и непосредственно на платформе 5, включающего: систему дистанционного управления движением, систему связи и передачи данных, комплект управления функциональным оборудованием манипулятора и подвижного подводного модуля, систему технического зрения, приводы исполнительных механизмов, линейные электродвигатели системы управления движением, связанные электрически с рулевыми механизмами, коробкой переключения передач, с рычагом газа, система управления движением дополнительно оснащена системой топопривязки и навигации, включающей инерциальную систему ориентации в пространстве, спутниковую навигационную систему и два одометра, а также информационно-вычислительную систему, состоящую из двух бортовых компьютеров и магистрально-модульной платформы.
Робототехнический разведывательный комплекс амфибийный (фиг. 1-6) функционирует следующим образом. Для выполнения задач инженерной разведки при подготовке и форсировании водной преграды техническое средство, заранее подготовленное и проверенное на работоспособность всех его систем, доставляется при помощи грузового автомобиля 19 в район водной преграды (акватории), после чего самостоятельно разгружается (фиг. 6) по двум аппарелям или с использованием грунтовой возвышенности, при этом управление комплексом производится оператором с использованием стационарного или выносного (мобильного) дистанционного пульта управления 20. Перед заходом в воду, как правило под прямым углом к урезу воды, для обеспечения повышенной остойчивости, особенно в штормовую погоду, боковые корпуса 1 раздвигаются на максимальную ширину (фиг. 1, 3) посредством телескопических штанг 4, выполненных из пултрузионного композитного материала с фиксирующими штоками. Кроме того, для обеспечения лучшего кругового обзора и условий работы радиосвязи штанга с закрепленными видеокамерами 6 и антенным устройством выдвигается на полную высоту. Движение катамарана по воде осуществляется за счет трех пар ведущих гребных колес 8 со звездочками 21, соединенных между собой цепной передачей 22 (фиг. 1, 2) с приводом от двух бензиновых двигателей, размещенных в герметических отсеках 3 поплавка 2, с забором воздуха по специальному воздухозаборному патрубку 23. При необходимости увеличения скорости или наличии встречного высокого течения включаются в работу трехлопастные гребные винты 10. Поворот катамарана может осуществляться практически на месте за счет реверсного включения привода одной из сторон на обратное вращение, а также при выключении привода левой или правой стороны. Движение катамарана по суше или по воде задним ходом осуществляется на пониженной передаче. Для обеспечения возможности движения по суше в летний и зимний периоды года без скольжения по грунту, особенно в плохую погоду, на ободах гребных колес 8 выполнены опорные полки 9 с грунтозацепами в виде шипов. Техническое средство может применяться при ведении разведки водной преграды (акватории) как в военное, так и в мирное время, при обеспечении мониторинга государственной границы и ее прибрежных зон, осуществлении контроля за речными судами, занимающимися ловлей рыбы и т.д., а также при необходимости отслеживать различные цели, передавая всю информацию оператору. Данное устройство может привлекаться для ведения поисково-спасательных работ, осмотра и ликвидации потенциально опасных объектов без риска для жизни человека. Для этой цели на платформе 5 поплавка 2 предусмотрен манипулятор 11 с видеокамерой 12 (фиг. 4, 5), клещевыми захватами 24 с небольшими крюками по бокам для подъема или отбуксировки на безопасное расстояние небольших, в первую очередь взрывоопасных, предметов, при этом для их уничтожения на стреле манипулятора могут закрепляться до трех одноразовых гранатометов, наводка на цель которых осуществляется с использованием видеокамеры 12. Кроме того, по бокам манипулятора 11 к платформе 5 при помощи электромагнитных замыкателей могут закрепляться от двух до четырех зарядов взрывчатого вещества (фугасов) 25 или мин для их использования (сбрасывания) при необходимости проделывании проходов в минно-взрывных и невзрывных заграждениях, в створе запланированной переправы, а также противодесантных мин - для минирования отдельных гидротехнических сооружений и других объектов противника. Для расширения возможностей по разведке водной акватории непосредственно в зоне переправы, в носовой части кормового поплавка, предусмотрена сферообразная полость 13 для размещения в ней подвижного подводного разведывательного модуля 14 (фиг. 5), оснащенного магнитометрическим датчиком 15, гидролокаторами 16 переднего и боковых обзоров, подводной видеокамерой 17 с подсветкой, а также двух пар клещевых захватов 18 для подъема объектов, имеющих небольшую массу и перемещения их на безопасное расстояние. При этом на пульт оператора выводятся и сохраняются в памяти данные об обликах обнаруженных надводных и подводных объектов. Одновременно производится автоматическая обработка изображений с использованием теории распознавания объектов для их идентификации. Данный модуль работает как в транспортном положении, находясь в носовой части поплавка (фиг. 5), так и в подвижном положении при опускании в толщу воды на глубину до 20 м для доразведки и подъема неизвестных малоразмерных предметов или их уничтожения на месте накладными зарядами взрывчатого вещества со взрывателями замедленного действия или управляемых по радиосигналам. Данное техническое устройство, несмотря на оснащение камерами ночного видения, магнитометрическим датчиком и гидролокаторами, которые постоянно сканируют пространство в секторе до 360°, должно обеспечивать свою безопасность от несанкционированных действий по его захвату или попытке уничтожения. Для этого комплекс оснащается в мирное время нелетальными средствами поражения, а в военное время может применять автоматическое стрелковое оружие для адекватного ответного воздействия, при этом такое оружие находится под защитным колпаком 7, закрепленным на платформе 5, в носовой части поплавка 2. Оружие наводится на цель оператором при помощи курсовой видеокамеры 26. Для обезвреживания роботов-разведчиков и противодесантных мин противника с неконтактными взрывателями может также использоваться одновременное ударное воздействие на их чувствительные сейсмоакустические и магнитные датчики электрогидравлическим ударом и импульсным магнитным полем, обеспечивая нарушение функционирования электронных схем обработки поступающих к ним сигналов. В особых случаях техническое средство должно иметь заряд взрывчатого вещества, используемый для самоликвидации при попытке его захвата, а также радиомаяк для аварийных ситуаций с целью его обнаружения и экстренной эвакуации. Для буксировки комплекс имеет в носовой и кормовой части специальные буксирные кольца.
Управление боевой работой робототехнического разведывательного комплекса амфибийного, включая управление его различными системами и механизмами, может осуществляться как с единого интегрированного стационарного поста управления, так и с отдельных выносных (мобильных) постов 20 (фиг. 6), находящихся в вербальном контакте, при этом техническое средство управляется с применением типового унифицированного комплекса электронного бортового оборудования, разработанного для беспилотных или безэкипажных модулей, закрепленного как в герметических отсеках 3 поплавка 2, так и непосредственно на платформе 5, включающего: систему дистанционного управления движением, систему связи и передачи данных, комплект управления функциональным оборудованием манипулятора 11 и подвижным подводным модулем 14, систему технического зрения, приводы исполнительных механизмов, линейные электродвигатели системы управления движением, связанные электрически с рулевыми механизмами, коробкой переключения передач, с рычагом газа, система управления движением дополнительно оснащена системой топопривязки и навигации, включающей инерциальную систему ориентации в пространстве, спутниковую навигационную систему и два одометра, а также информационно-вычислительную систему, состоящую из двух бортовых компьютеров и магистрально-модульной платформы.
Техническое средство может доставляться в любой район боевых действий автомобильным, железнодорожным, воздушным и морским транспортом без ограничений по расстоянию и скорости.
Робототехнический разведывательный комплекс амфибийным является высокотехнологичным и относительно дорогим средством, эффективность использования которого в зонах высокого риска разрушения и срок службы во многом зависят от квалификации и тренированности оператора при ведении инженерной разведки водной акватории. Указанные профессиональные качества достигаются интенсивным учебно-тренировочным процессом, доведением четкости действий «до автоматизма» при отработке различных базовых технологий работы. Успех такой работы, со снижением уровня психоэмоционального напряжения оператора, во многом зависит также от полноты получения визуальной информации от технического устройства и удобства компоновки клавиатуры блоков управления.
Готовность предложенного технического устройства к опытной проверке рабочего макета подтверждается наличием: чертежей технических решений, необходимых отечественных материалов, оптико-электронной аппаратуры для управления в дневное и в ночное время, цифровой вычислительной техники, разработанных образцов типовых унифицированных робототехнических комплексов для дистанционного управления как беспилотными летательными аппаратами, так и неземными безэкипажными транспортными средствами, включающих инерциальную систему ориентации в пространстве, спутниковую навигационную систему, а также малогабаритные бензиновые двигатели с трансмиссией, генераторами и аккумуляторными батареями, а также с зарядными устройствами и др. Данный комплекс может быть изготовлен на базе ОАО «Ковровский электромеханический завод» (Владимировская обл.) или АО «Выксунский металлургический завод» (Нижегородская обл.), имеющих опыт такой работы.
Преимущество предложенного технического решения по сравнению с известными аналогами достигается:
- улучшением эксплуатационных характеристик нового технического решения за счет повышения его плавучести, скорости, маневренности и остойчивости, а также возможности дистанционного управления;
- расширением комплекса выполняемых задач по ведению инженерной разведки водной преграды и ее береговой зоны;
- обеспечением самостоятельного входа с суши в водную преграду и выхода из нее для разведки береговой зоны, погрузки в грузовое транспортное средство при необходимости передислокации в новый район;
- применением для оценки состояния гидротехнических сооружений, наличия минно-взрывных и противодесантных заграждений при подходе и на водной преграде;
- возможностью ведения разведки и мониторинга акваторий вблизи особо важных объектов;
- обеспечением разведывательно-диверсионной деятельности, проведения минировании или разрушения отдельных объектов, фарватеров и бродов;
- обеспечением самообороны, в том числе и с использованием нелетальных средств в мирное время;
- возможностью буксировки, с помощью захватов в виде крючков на манипуляторе, плавающих взрывоопасных предметов и противодесантных мин для их перемещения в безопасное место и уничтожения;
- обеспечением возможности проведения дистанционной разведки характера профиля дна, несущей способности грунтов, наличия мин и других взрывоопасных предметов в створе переправ и др.;
- обеспечением безопасности личного состава или персонала, управляющего комплексом с безопасного расстояния (из укрытия), при работе со взрывоопасными предметами или в условиях огневого воздействия противника.
Теоретические исследования и проведенные расчеты показывают, что предложенное техническое устройство робототехнического разведывательного комплекса амфибийного по основному критерию оценки эффективности «боевая эффективность применения - стоимость и реализуемость» имеет показатели, примерно в три раза выше по сравнению с существующими аналогами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| СПОСОБ ВОДНОГО ДЕСАНТИРОВАНИЯ БРОНЕТЕХНИКИ В ЗОНУ ВЕДЕНИЯ БОЕВЫХ ДЕЙСТВИЙ С ОБЕСПЕЧЕНИЕМ САМОСОХРАНЕНИЯ И БЕЗОПАСНОСТИ НАПЛАВУ | 2012 |
|
RU2491495C1 |
| Система управления многофункционального робототехнического комплекса обеспечения боевых действий | 2016 |
|
RU2652329C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОЙ ПОДДЕРЖКИ | 2013 |
|
RU2548207C1 |
| Способ проведения технической разведки повреждённых образцов вооружения и военной техники в ходе ведения боевых действий | 2020 |
|
RU2749540C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2023 |
|
RU2813930C2 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
Изобретение относится к робототехнике. Робототехнический разведывательный комплекс амфибийный дополнительно содержит кормовой поплавок, выполненный из отдельных непотопляемых герметичных отсеков, соединенных с боковыми элементами корпуса, изготовленными из стеклопластика и пенопласта, раздвижными телескопическими штангами с фиксирующими штоками, с закрепленной сверху платформой. С левой и правой стороны предусмотрены по три ведущих гребных колеса с опорными шипованными полками. В торцевой части установлены снизу по два реверсных гребных винта, сверху - манипулятор с видеокамерой, а в носовой части устроена сферообразная полость для размещения подвижного подводного разведывательного модуля с магнитометрическим датчиком, гидролокаторами переднего и боковых обзоров, видеокамерой с подсветкой и двух пар клещевых захватов. Техническое средство управляется с применением типового унифицированного комплекса электронного бортового оборудования. Достигается повышение эффективности разведки. 6 ил.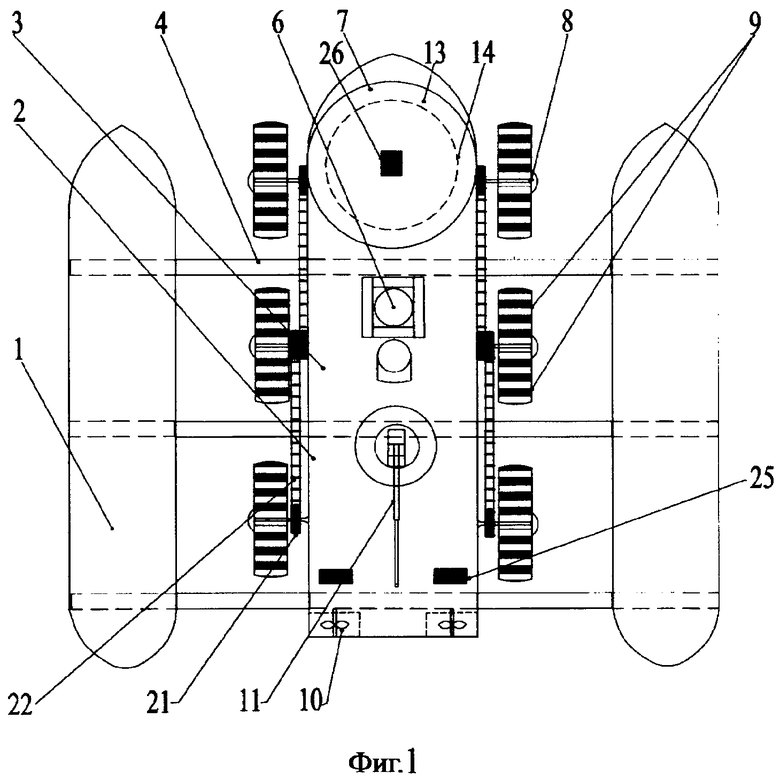
Робототехнический разведывательный комплекс амфибийный, содержащий два корпуса и кормовой поплавок, связанные между собой, отличающийся тем, что в нем кормовой поплавок выполнен из отдельных непотопляемых герметичных отсеков для силовой установки с трансмиссией, генератором, аккумулятором и зарядным устройством, соединенных с боковыми элементами корпуса, изготовленными из стеклопластика и пенопласта, раздвижными телескопическими штангами с фиксирующими штоками, с закрепленной сверху платформой для монтажа вспомогательного оборудования - выдвижной штанги с видеокамерами кругового обзора и колпака со средствами самообороны, с левой и правой сторон предусмотрены по три ведущих гребных колеса с опорными шипованными полками для движения по суше, в торцевой части установлены снизу по два реверсных гребных винта, сверху - манипулятор с видеокамерой для выполнения надводных работ, а в носовой части устроена сферообразная полость для размещения подвижного подводного разведывательного модуля с магнитометрическим датчиком, гидролокаторами переднего и боковых обзоров, видеокамерой с подсветкой и двух пар клещевых захватов, при этом робототехнический разведывательный комплекс амфибийный управляется с применением типового унифицированного комплекса электронного бортового оборудования, разработанного для беспилотных или безэкипажных модулей, закрепленного как в герметических отсеках, так и непосредственно на платформе, включающего: систему дистанционного управления движением, систему связи и передачи данных, комплект управления функциональным оборудованием манипулятора и подвижного подводного модуля, систему технического зрения, приводы исполнительных механизмов, линейные электродвигатели системы управления движением, связанные электрически с рулевыми механизмами, коробкой переключения передач, с рычагом газа, система управления движением дополнительно оснащена системой топопривязки и навигации, включающей инерциальную систему ориентации в пространстве, спутниковую навигационную систему и два одометра, а также информационно-вычислительную систему, состоящую из двух бортовых компьютеров и магистрально-модульной платформы.
| US 4932831 A1, 12.06.1990 | |||
| КАТАМАРАН | 2008 |
|
RU2443592C2 |
| МАШИНА ДЛЯ ПРОПУДРИВАНИЯ ЛИСТОВ РЕЗИНЫ | 1933 |
|
SU34140A1 |
| CN 202414147 U, 05.09.2012 | |||
| Аппарат для электрической сварки в притык | 1926 |
|
SU4770A1 |

