Предлагаемая группа изобретений относится к области высокоточного оружия для авиационной техники. Изобретения могут быть использованы в качестве:
- способа инициирования воздушно-динамических рулевых приводов (далее по тексту - ВДРП), преимущественно, управляемой авиабомбы (УАБ), а также управляемых снарядов и ракет авиационных комплексов высокоточного оружия;
- реализующего заявляемый способ устройства инициирования ВДРП перед сбросом УАБ с носителя (самолет, вертолет, БПЛА);
- способа проверки готовности электрических цепей ВДРП перед сбросом УАБ с носителя;
- ВДРП для УАБ, конструктивно объединяющего заявляемые устройства;
- аппаратуры управления, реализующей заявляемый способ проверки готовности электрических цепей ВДРП перед сбросом УАБ с носителя.
Известен способ раскрытия рулей блока рулевого привода управляемого снаряда (патент РФ №2237598, МПК В64С 13/48, F42B 10/20).
Известный способ основан на приведении в действие механизма раскрытия рулей блока рулевого привода под действием давления газа, образующегося в результате срабатывания электровоспламенителя при подаче электрического сигнала. При этом за счет отрыва герметизирующих элементов освобождаются пазы для выхода рулей на обтекателе блока рулевого привода, после чего рули раскрываются и фиксируются.
Данный способ реализован в блоке рулевого привода (патент РФ №2237598, МПК В64С 13/48, F42B 10/20), в котором подпружиненные рули складываются внутрь обтекателя через продольные пазы, закрытые герметизирующими элементами. Механизм раскрытия рулей выполнен в виде срабатывающего от электровоспламенителя газового двигателя, поршни которого открывают герметизирующие элементы обтекателя, после чего взаимодействуют с рулями, приводя их в рабочее положение.
Известен управляемый артиллерийский снаряд (патент РФ №2258897, МПК F42B 15/00), в котором подпружиненные аэродинамические рули и подпружиненные воздухозаборники ВДРП, сложенные через герметизированные щитками продольные пазы в корпусе снаряда, после выстрела приводятся в рабочее состояние поршневым газовым двигателем, срабатывающим от электровоспламенителя. В рабочем положении аэродинамические рули и подпружиненные воздухозаборники фиксируются после отрыва герметизирующих щитков поршнями газового двигателя.
Одна из важнейших задач, решаемых при разработке УАБ, - обеспечение безопасности носителя при сбросе УАБ с подкрыльевой (подфюзеляжной) подвески или из бомболюка. Обязательные условия ее выполнения включают:
- отсутствие отделяемых от УАБ конструктивных элементов при сбросе и в процессе приведения системы управления в рабочее состояние, что исключает возможность попадания инородных тел в двигатели носителя;
- проверку готовности электрических цепей системы управления УАБ, в том числе и рулевых приводов, к сбросу, что обуславливает движение УАБ с момента отделения от носителя в соответствии с командами системы управления;
- разгерметизацию пневмосистемы ВДРП и разарретирование аэродинамических рулей УАБ до сброса, что определяет возможность управления траекторией ее движения с момента отделения по командам системы управления для исключения возможного столкновения с носителем под действием обтекающего воздушного потока в условиях интенсивных интерференционных возмущений.
Очевидно, что использование в УАБ приведенных выше известных технических решений не представляется возможным из-за наличия отделяемых герметизирующих элементов.
Наиболее близким к заявляемому способу инициирования ВДРП по совокупности существенных признаков и достигаемому эффекту является способ инициирования системы управления артиллерийского снаряда (патент РФ №2192615, МПК F42B 15/01), основанный на включении функциональных устройств системы управления снаряда после задействования бортовой батареи от инерционного механизма, срабатывающего под действием ствольной перегрузки при выстреле снаряда. Этот способ, обеспечивая выполнение введенной перед выстрелом циклограммы включения функциональных устройств системы управления снаряда в процессе его движения по заданной траектории полета, не предусматривает проведение контроля готовности (исправности) функциональных устройств системы управления перед выстрелом.
Наиболее близким к заявляемому устройству инициирования ВДРП по совокупности существенных признаков и достигаемому эффекту является хвостовой отсек воздушно-динамических рулевых приводов для управляемых летательных аппаратов (преимущественно для УАБ) (патент РФ №2418261, МПК F42B 25/00, F15B 15/00), в котором каждый ВДРП размещен в крыле с поворотным закрылком, профильным уступом со стороны бортовой хорды и концевой шайбой, в которой каналами с переднего и донного торцев образованы, соответственно, воздухозаборник и устройство сброса воздуха. Пневмораспределительное устройство (далее по тексту - ПРУ) закреплено к крылу со стороны его концевой хорды, пневмодвигатель размещен в сквозном окне центральной части крыла, герметизированном крышками, а кинематическая связь оси закрылка с выходным валом пневмодвигателя выполнена в виде рычажной пары, расположенной со стороны профильного уступа крыла.
Недостатки данного устройства обусловлены не герметичностью пневмосистемы ВДРП:
- при размещении УАБ на подкрыльевой подвеске возможно попадание инородных тел в каналы пневмосистемы ВДРП (особенно при взлете и посадке носителя), что может привести к его нештатной работе вплоть до отказа;
- при отсутствии управляющего входного сигнала на ПРУ поршень пневмодвигателя ВДРП находится в произвольном (неопределенном) положении, а координата углового положения руля зависит от величины и направления действующего на руль при движении носителя шарнирного аэродинамического момента и является случайной величиной;
- невозможно обеспечить длительные сроки хранения и эксплуатации УАБ.
Известен способ проверки приведения в рабочее состояние герметичного автопилотного блока (патент РФ №2126949, МПК F42B 10/62), в процессе которого в ВДРП от внешних источников электропитания запитывают датчики обратной связи (далее по тексту - ДОС) ВДРП и подают сигнал на электровоспламенитель механизма разгерметизации, раскрытия рулей и воздухозаборников, а все сигналы, информирующие о функционировании механизма (напряжение поджига, сигналы с ДОС) регистрируются светолучевым осциллографом.
Данный способ предлагает проверку функционирования механизма в лабораторных или заводских условиях. Поэтому к причинам, исключающим использование данного способа для проверки ВДРП в составе АСП в процессе полета носителя, следует отнести:
- срабатывание механизма разгерметизации, раскрытия рулей и воздухозаборников в процессе контроля его характеристик, так как подобные устройства являются устройствами одноразового действия;
- использование лабораторного оборудования (источники питания, регистрирующая аппаратура), размещение которого практически невозможно как на носителе, так и в составе УАБ.
Наиболее близким к заявляемому способу проверки готовности ВДРП по совокупности существенных признаков и достигаемому эффекту является способ проверки качества функционирования рулевых приводов и автопилотов управляемых снарядов (патент РФ №2181681, МПК В64С 13/36, F42B 15/01), основанный на замере динамических характеристик ВДРП при подаче определенного давления питания, входного управляющего сигнала прямоугольной формы, регистрации угловой координаты поворота рулей и преобразовании регистрируемых сигналов в специальном устройстве.
Этот способ проверки ВДРП обеспечивает проведение лабораторных испытаний ВДРП в процессе разработки или при серийном производстве в заводских условиях и не может быть использовано для проверки ВДРП в составе УАБ в процессе полета носителя.
Наиболее близким к заявляемому ВДРП по совокупности существенных признаков и достигаемому эффекту является представленный выше хвостовой отсек воздушно-динамических рулевых приводов для управляемых летательных аппаратов (преимущественно для УАБ) (патент РФ №2418261, МПК F42B 25/00, F15 В 15/00).
К перечисленным выше недостаткам данного технического решения следует также отнести отсутствие обеспечения проверки готовности ВДРП перед сбросом УАБ.
Наиболее близким к заявляемой аппаратуре управления ВДРП авиабомбы по совокупности существенных признаков и достигаемому эффекту является аппаратура управления релейным пневмогидроприводом с вибрационной линеаризацией систем управления ракет и установок вооружения (патент РФ №2243491, МПК F42B 10/60, 15/01, В64С 13/40), который содержит генератор вынужденных колебаний, последовательно соединенные сумматор, первый вход которого является входом привода, релейный элемент, усилитель мощности, распределительное устройство с электромагнитом и исполнительный двигатель, выход которого через ДОС соединен со вторым входом сумматора, третий вход которого соединен с генератором. При отработке входного сигнала аппаратура управления обеспечивает работу привода в режиме широтно-импульсной модуляции.
К недостаткам данного технического решения с точки зрения его применения в качестве рулевого привода авиабомбы следует отнести отсутствие обеспечения проверки работоспособности привода перед сбросом авиабомбы.
Общая цель заявляемых способов и устройств - обеспечение безопасности сброса УАБ с воздушно-динамическими рулевыми приводами с подкрыльевой (подфюзеляжной) подвески или из бомболюка носителя.
Для решения данной задачи в заявляемом способе инициирования ВДРП УАБ, включающем инициирование функциональных устройств системы управления УАБ после задействования бортовой батареи, перед сбросом УАБ электрические цепи ВДРП задействуют от электрической сети носителя и осуществляют их проверку с формированием электрического сигнала готовности. При наличии сигнала готовности производят задействование бортовой батареи от электрической сети носителя, после чего разарретирование аэродинамического руля и разгерметизацию пневмосистемы ВДРП производят одновременно по сигналу бортовой системы управления с формированием сигнала, разрешающего сброс УАБ.
Для решения поставленной задачи в заявляемом устройстве инициирования ВДРП УАБ, размещенного в крыле с поворотным закрылком и концевой шайбой, в которой каналами с переднего и донного торца образованы соответственно воздухозаборник и устройство сброса воздуха, концевая шайба выполнена из трех соосных последовательно расположенных вдоль концевой хорды крыла и закрепленных к нему втулок. В передней и задней втулках выполнены соответственно воздухозаборный канал и канал сброса воздуха, в которых установлены носовой и донный клапаны, жестко связанные передним и задним штоками с поршнем газового двигателя. Рабочая камера газового двигателя образована во внутренней полости средней втулки и сообщена отверстием с камерой установленного на средней втулке электровоспламенителя. На заднем штоке донным клапаном закреплена жестко связанная срезным штифтом с задней втулкой крестовина, одна из образующих которой установлена в торцевом пазу оси закрылка. На жестко связанном со средней втулкой диэлектрическом основании установлены контакты, взаимодействующие с контактами, закрепленными на переднем штоке, который выполнен с уступом перед герметизирующей рабочую камеру газового двигателя и установленной в средней втулке заглушкой. Расстояние от торца заглушки до уступа переднего штока равно величине рабочего хода поршня газового двигателя.
Для решения поставленной задачи в заявляемом способе проверки готовности ВДРП перед сбросом УАБ, включающем подачу питания на аппаратуру привода от внешнего источника электропитания и формирование входного сигнала в контуре управления привода, подачу электропитания на систему управления УАБ и аппаратуру управления привода осуществляют от электрической сети носителя. В контур управления привода подают высокочастотный сигнал, поступающий на электромагнит пневмораспределительного устройства, и при срабатывании электромагнита аппаратура управления привода формирует электрический сигнал готовности в систему управления авиабомбы. В случае реализации в приводе контура управления с генератором линеаризующих колебаний подачу высокочастотного сигнала обеспечивают включением генератора контура управления привода.
Для решения поставленной задачи в заявляемый ВДРП, содержащий крыло с поворотным закрылком, выполненное с концевой шайбой и профильным уступом со стороны бортовой хорды, размещенный в сквозном окне крыла пневмодвигатель, закрепленный к крылу со стороны концевой хорды ПРУ и рычажную передачу от выходного вала пневмодвигателя к оси закрылка, расположенную со стороны профильного уступа, введены аппаратура управления, выходной разъем и ДОС. Аппаратура управления размещена в выполненной на поверхности крыла и расположенной перед пневмодвигателем полости, герметизированной крышкой, а выходной разъем и ДОС установлены профильном уступе крыла. На оси ДОС закреплен рычаг со сферическим пальцем, размещенным в пазу рычага пневмодвигателя и установленным в пазу вилки, закрепленной на рычаге пневмодвигателя. Все электрические соединения в ВДРП выполнены П-образным проводным жгутом, концы которого закреплены на концевой шайбе и профильном уступе крыла, а средняя часть размешена в сквозном отверстии, выполненном по размаху крыла от плоскости концевой хорды крыла до плоскости его профильного уступа и пересекающим полость под аппаратуру управления.
Для решения поставленной задачи в заявляемую аппаратуру управления ВДРП УАБ, содержащую последовательно соединенные сумматор, первый вход которого соединен с выходом генератора вынужденных колебаний, второй
- с выходом системы управления УАБ, третий - с выходом ДОС привода, релейный элемент и усилитель мощности, выходы которого соединены с обмотками электромагнита ПРУ привода, введены силовой электронный ключ, триггер и логический элемент «И». Усилитель мощности выполнен в виде двух электронных ключей, коммутационные входы которых соединены с первой шиной питания аппаратуры управления приводом, выходы - с обмотками электромагнита, соединенными вторыми выводами с общей для системы управления УАБ и аппаратуры управления второй шиной питания. Управляющий вход первого электронного ключа соединен с выходом релейного элемента, а управляющий вход второго электронного ключа соединен с выходом релейного элемента через инвертор. Управляющий вход силового электронного ключа соединен с выходом системы управления УАБ, коммутационный вход - с первой шиной электропитания системы управления УАБ, выход - с первой шиной питания аппаратуры управления, а первый вход логического элемента «И» соединен с выходом первого электронного ключа, второй вход через триггер - с выходом второго электронного ключа, выход - со входом системы управления УАБ.
Порядок проведения последовательных операций в заявляемых способах и конструкции заявляемых устройств пояснены схемами и чертежами, где:
на фиг. 1 представлена схема прохождения сигналов в системе «носитель - УАБ - ВДРП» при инициировании ВДРП перед сбросом УАБ;
на фиг. 2 - схема аппаратуры управления ВДРП, реализующей заявляемый способ проверки готовности привода перед сбросом УАБ (индексом «А» обозначена механическая часть привода);
на фиг. 3 - общий вид заявляемого ВДРП, конструктивно объединяющего заявляемые устройство инициирования ВДРП и аппаратуру управления привода, обеспечивающую проверку готовности ВДРП перед сбросом УАБ;
на фиг. 4 - местный вид В по месту расположения газового двигателя устройства инициирования ВДРП;
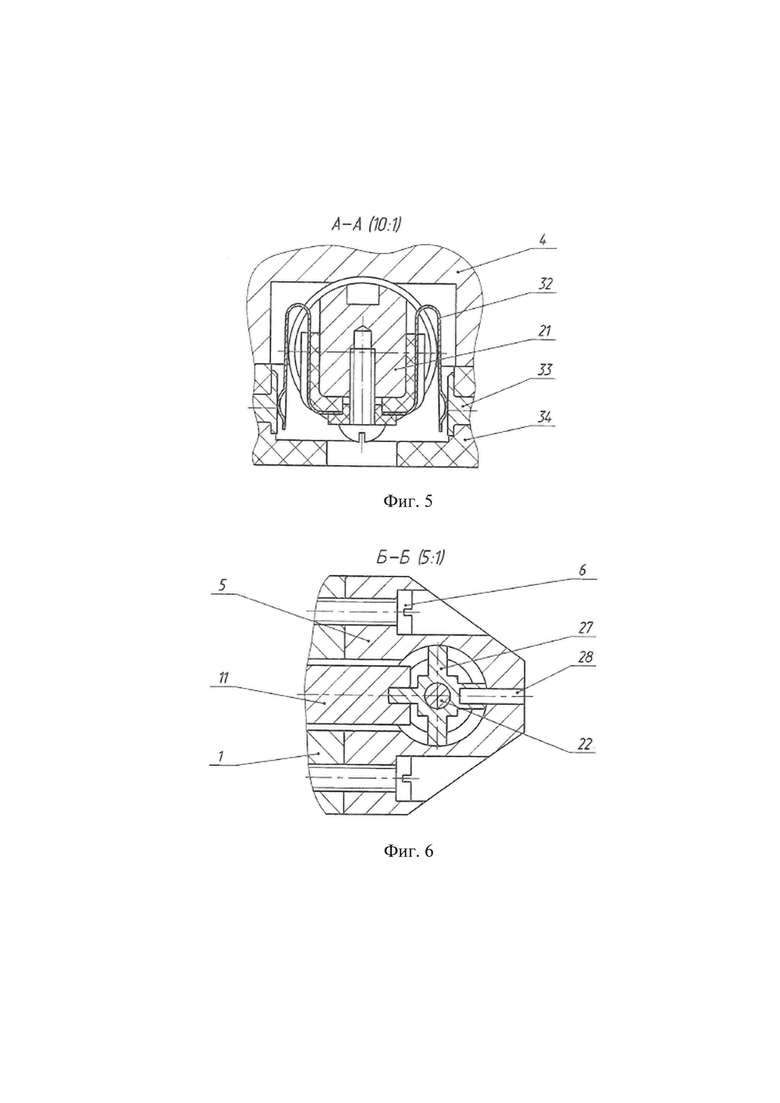
на фиг. 5 - местный разрез А-А по месту расположения контактов арретира руля устройства инициирования ВДРП;
на фиг. 6 - местный разрез Б-Б по оси руля по месту расположения арретира;
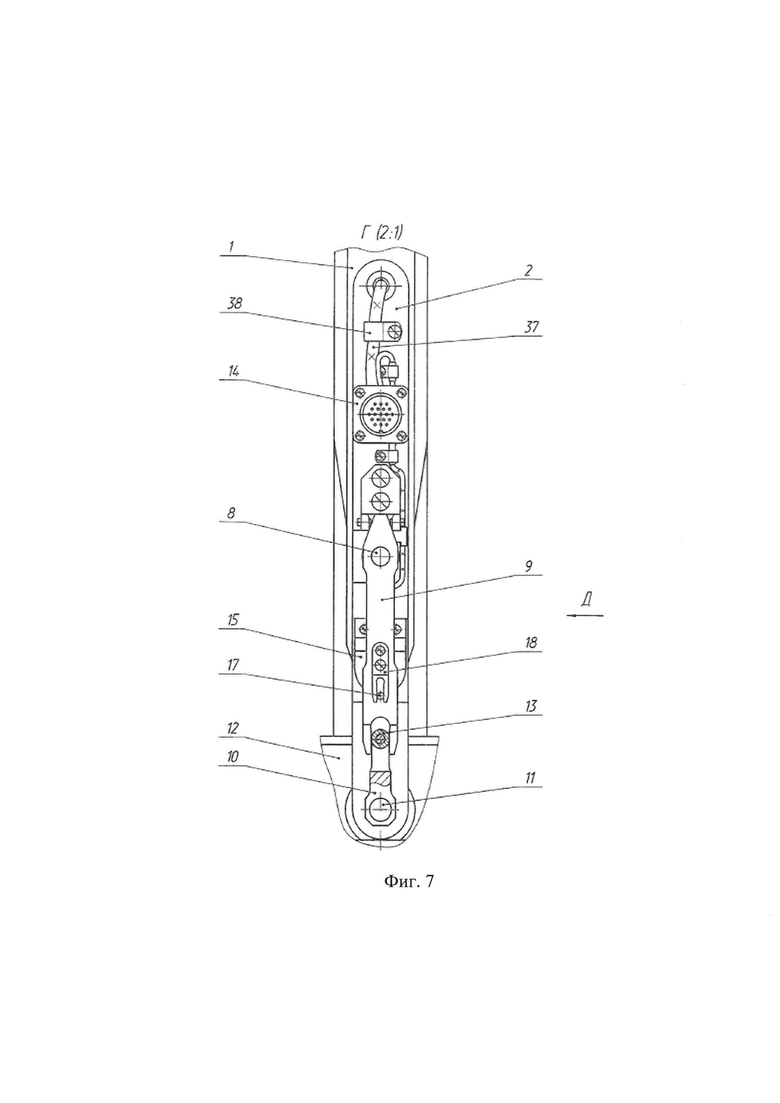
на фиг. 7 - местный вид Г на кинематические передачи «ось пневмодвигателя - ось руля» и ДОС со стороны бортовой хорды крыла;
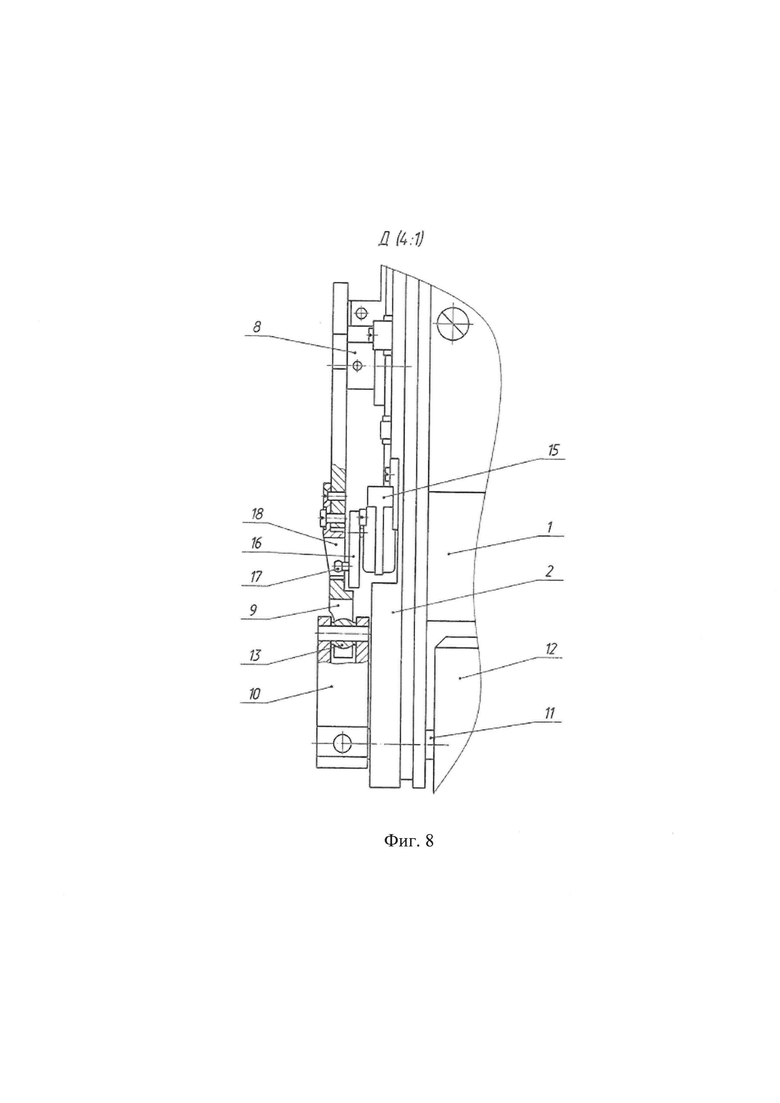
на фиг. 8 - местный вид Д на кинематические передачи «ось пневмодвигателя - ось руля» и ДОС в плане руля.
В схемах на фиг. 1 и фиг. 2 использованы обозначения в соответствии с ГОСТ 2.759-82 и ГОСТ 2.721-74 ЕСКД.
Конструктивно-базовым элементом ВДРП служит крыло 1, выполненное с профильным уступом 2 со стороны бортовой хорды и концевой шайбой, состоящей из передней 3, средней 4 и задней 5 соосных втулок, закрепленных к крылу 1 винтами 6 (см. фиг 6).
В сквозном пазу крыла 1 размещен герметизированный крышками 7 пневмодвигатель, выходная ось которого 8 кинематически связана посредством рычага 9 и рычага 10 с осью 11 руля (см. фиг. 7), выполненного в виде закрылка 12 «биплан». При этом концевая вилка рычага 9 охватывает шаровой ролик 13, установленный на оси в рычаге 10.
На уступе 2 крыла 1 установлены выходной разъем 14 и ДОС 15, на оси которого закреплен рычаг 16 со сферическим пальцем 17 (см. фиг. 8). На рычаге 9 закреплена вилка 18, концевая часть которой размещена в сквозном пазу рычага 9 и контактирует со сферой пальца 17.
Воздухозаборный канал выполнен в передней втулке 3 и герметизирован носовым клапаном 19, а канал сброса воздуха - в задней втулке 5 и герметизирован донным клапаном 20.
Носовой 19 и донный 20 клапаны жестко связаны соответственно передним 21 и задним 22 штоками с поршнем 23 газового двигателя, рабочая камера 24 которого образована в средней втулке 4 и сообщена с камерой электровоспламенителя 25, установленного на средней втулке 4 (см. фиг. 4). Со стороны переднего штока 21 рабочая камера 24 газового двигателя герметизирована заглушкой 26, перед которой передний шток 21 выполнен с уступом на расстоянии ХШТ от торца заглушки 26, равном рабочему ходу ХП поршня 23 газового двигателя. На заднем штоке 22 донным клапаном 20 закреплена крестовина 27, одна из образующих которой установлена в торцевом пазу оси 11 руля. Крестовина 27 жестко связана с задней втулкой 5 срезным штифтом 28 (см. фиг. 6).
Пневмораспределительное устройство 29 установлено в полости, выполненной со стороны концевой хорды крыла 1 и сообщенной каналом 30 с каналом задней втулки 5 устройства сброса воздуха. Вход ПРУ отверстием 31 сообщен с каналом воздухозаборника в передней втулке 3.
На переднем штоке 21 закреплены контакты 32 нормально замкнутые с контактами 33 установленными на диэлектрическом основании 34, закрепленном к средней втулке 4 (см. фиг. 5).
В расположенной перед пневмодвигателем полости, образованной на поверхности крыла и герметизированной крышкой 35, размещена аппаратура управления 36 ВДРП.
Электромонтаж ВДРП выполнен П-образным проводным жгутом 37, концы которого закреплены на профильном уступе крыла 1 и средней втулке 4 скобами 38. Средняя часть жгута 37 размещена в сквозном отверстии 39, выполненном по размаху крыла 1 от плоскости его концевой хорды до плоскости профильного уступа 2 и пересекающим полость под аппаратуру управления 36.
Аппаратура управления 36 содержит (см. фиг. 2) сумматор «Σ», вход «а» которого соединен с выходом генератора вынужденных колебаний «G», на вход «b» поступает управляющий сигнал «Uy» с выхода системы управления УАБ, вход «с» соединен с выходом ДОС пневматического рулевого привода «А». Выход сумматора «Σ» соединен с входом релейного элемента, выход которого соединен с управляющим входом «е» первого электронного ключа «D2» усилителя мощности и через инвертор - с управляющим входом «е» второго электронного ключа «D3» усилителя мощности. Коммутационные входы «с» электронных ключей «D2» и «D3» соединены с первой шиной питания «BUS+», а выходы «d» - соответственно с первой «YA1» и второй «YA2» обмотками электромагнита ПРУ, при этом вторые выводы обмоток соединены с общей для системы управления УАБ и аппаратуры управления привода второй шиной питания «BUS-». Для формирования команды КГРП в систему управления УАБ в аппаратуру управления 36 введены триггер (Т) и логический элемент «И», при этом входы логического элемента «И» соединены с выходом «d» электронного ключа «D2» и через триггер - с выходом «d» электронного ключа «D3».
Команда КГРП в систему управления УАБ в аппаратуре управления 36 формируется на выходе логического элемента «И».
Проверку готовности УАБ к сбросу осуществляют после обнаружения цели и прицеливания, при этом в систему управления УАБ с носителя подают электропитание и команду «СГ» проверки готовности ее функциональных (исполнительных) элементов и, в том числе, рулевого привода (см. фиг. 1 и 2).
Для проверки готовности рулевого привода система управления УАБ формирует сигнал «СГРП» который поступает в аппаратуру управления 36 на управляющий вход «е» первого электронного ключа «D1» устройства проверки готовности рулевого привода (см. фиг. 2).
Первый электронный ключ «D1» открывается и соединяет шину питания (BUS+) аппаратуры управления 36 с первым выходом (+U) источника питания носителя. Поскольку вторая шина питания (BUS-) соединена со вторым выходом (-U) источника питания носителя и служит общей для носителя, системы управления УАБ и аппаратуры управления 36, электропитание подается на устройство проверки готовности рулевого привода.
Высокочастотный сигнал генератора (G) устройства проверки готовности рулевого привода поступает на вход релейного элемента, на выходе которого формируется периодический сигнал в виде прямоугольных двуполярных импульсов, следующих с частотой сигнала генератора (G). Высокая частота сигнала генератора «G» обеспечивает высокое быстродействие устройства.
Прямоугольные импульсы поочередно поступают на управляющие входы «е» второго «D2», а через инвертор - третьего «D3» электронных ключей, которые поочередно открываясь, коммутируют соответственно обмотки YA1 и YA2 электромагнита ПРУ с шиной (BUS+). Так как вторые выводы обмоток электромагнита YA1 и YA2 соединены с шиной (BUS-), протекание в них тока определяет поступление сигналов на входы логического элемента «И», при этом на второй вход логического элемента «И» сигнал поступает через триггер «Т», сигнал на выходе которого присутствует постоянно после первого срабатывания третьего электронного ключа «D3». Таким образом, одновременное присутствие сигналов на входах логического элемента «И» определяет на его выходе сигнал «КГРП», поступающий на вход системы управления УАБ и свидетельствующий о целостности электрических цепей и готовности электромагнита рулевого привода к работе.
Одновременно с сигналом «СГрп» система управления УАБ формирует сигнал «САР» - сигнал проверки арретированного положения аэродинамических рулей 11 (см. фиг. 3 и 6). При арретированном положении рулей закрепленные на переднем штоке 21 контакты 32 и установленные на диэлектрическом основании 34 контакты 33 (см. фиг. 5) нормально замкнуты и сигнал «САР», проходя через них, возвращается в систему управления УАБ («КАР»), свидетельствуя об арретированном положении рулей 11.
После проверки готовности рулевого привода по команде «СГРП» и готовности других функциональных (исполнительных) элементов (в том числе и проверки арретированного положения рулей 11 по команде «САР») система управления УАБ формирует общий сигнал готовности «СГ» на носитель, с которого в ответ поступает сигнал на задействование бортовой батареи «СБ».
После выхода батареи на режим система управления УАБ формирует сигнал «СРАЗ» на разарретирование рулей 11 и разгерметизацию пневмосистемы ВДРП, который поступает на электровоспламенитель 25. Под действием давления образующегося при срабатывании электровоспламенителя 25 газа поршень 23 и жестко связанные с ним передний 21 и задний 22 штоки, носовой 19 и донный 20 клапаны и крестовина 27 перемещаются на величину хода поршня 23 (ХП), равную величине зазора (ХШТ) между уступом переднего штока 21 и заглушкой 26, герметизирующей рабочую камеру 24 газового двигателя. При этом носовой клапан 19 открывает воздухозаборный канал передней втулки 3, донный клапан 20 открывает канал сброса воздуха задней втулки 5, крестовина 27 срезает штифт 28 и освобождает ось руля 11. Через воздухозаборный канал передней втулки 3 и отверстие 31 обтекающий носитель воздушный поток поступает в ПРУ 25, а полость низкого давления отверстием 30 сообщена с каналом устройства сброса воздуха задней втулки 5. Таким образом срабатывание газового двигателя устройства инициирования ВДРП одновременно обеспечивает разгерметизацию его пневмосистемы и разарретирование руля 11.
Вместе с тем, перемещение контактов 32 вместе с передним штоком 21 обусловливает нарушение их электрической связи с контактами 33 и обнуление сигнала «Кар» на входе системы управления УАБ, что свидетельствует о готовности ВДРП к работе и разрешает прохождение команды на сброс УАБ.
После отделения УАБ от носителя первоначальные задачи, решаемые ВДРП, определяют необходимость точной отработки с высоким быстродействием команд системы управления УАБ, направленных на:
- выполнение маневра, обеспечивающего плавное отделение УАБ от носителя в условиях интенсивных интерференционных возмущений, для исключения удара УАБ по носителю;
- стабилизацию углового положения в положении «X» или «+» для стабилизированных по крену УАБ.
Для обеспечения стабильных требуемых динамических и эксплуатационных характеристик в конструкцию заявляемого ВДРП введены аппаратура управления 36, ДОС 15 (датчик угла поворота руля 11) и выходной разъем 13, что позволяет выполнить ВДРП в виде отдельной сборочной единицы и осуществить контроль ее основных характеристик в процессе производства.
В соответствии с требованием герметичности ВДРП в составе УАБ, что связано с необходимостью выполнения нескольких взлет-посадок носителем с УАБ на подкрыльевой или подфюзеляжной подвеске, аппаратура управления 36 размещена в выполненной на поверхности крыла 1 полости, герметизированной крышкой 35, а ДОС 15 и выходной разъем 13 установлены на профильном уступе 2 крыла 1, который располагается внутри герметичного корпуса УАБ. С этой же целью все электрические соединения в ВДРП выполнены П-образным проводным жгутом 37, средняя часть которого размещена в отверстии 39 и коммутирует контакты аппаратуры управления 36, один конец на профильном уступе 2 крыла 1 и коммутирует контакты выходного разъема 13 и ДОС 15 руля 1, а противоположный конец закреплен скобой 38 на средней втулке 4 и коммутирует контакты электровоспламенителя 25, обмоток электромагнита ПРУ 29 и контакты 32 и 33 арретира руля 11.
Датчик обратной связи 15 определяет истинный угол отклонения поршня пневмодвигателя (а, значит, и руля 11), что позволяет реализовать работу ВДРП в линеаризованном или автоколебательном режимах с высокими точностными и динамическими характеристиками. Для обеспечения герметичности ВДРП в составе УАБ и упрощения конструкции рычаг 16 ДОС 15 размещен в пазу рычага 9, а сферический палец 17 установлен в пазу закрепленной на рычаге 9 вилки 18, выполняющей необходимые регулировки относительного углового положения рычага 16 и руля 11.
Таким образом, заявляемые способы и устройства в своей совокупности обеспечивают достижение поставленной цели - обеспечение безопасности сброса УАБ с воздушно-динамическими рулевыми приводами с подкрыльевой (подфюзеляжной) подвески или из бомболюка носителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХВОСТОВОЙ ОТСЕК ВОЗДУШНО-ДИНАМИЧЕСКИХ РУЛЕВЫХ ПРИВОДОВ ДЛЯ УПРАВЛЯЕМЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ПРЕИМУЩЕСТВЕННО ДЛЯ УПРАВЛЯЕМЫХ АВИАЦИОННЫХ БОМБ) И ПНЕВМОДВИГАТЕЛЬ РУЛЕВОГО ПРИВОДА | 2009 |
|
RU2418261C2 |
| Управляемый снаряд, блок рулевого привода управляемого снаряда, пневмораспределительное устройство рулевого привода управляемого снаряда, механизм инициирования рулевого привода управляемого снаряда | 2017 |
|
RU2669979C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339905C2 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ | 2003 |
|
RU2232973C1 |
| КРУГЛОСУТОЧНАЯ ВСЕПОГОДНАЯ ВЫСОКОТОЧНАЯ КОРРЕКТИРУЕМАЯ АВИАБОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С АВТОМАТОМ ГЛОБАЛЬНОЙ СПУТНИКОВОЙ НАВИГАЦИИ | 2006 |
|
RU2317515C1 |
| САМОНАВОДЯЩАЯСЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ | 2003 |
|
RU2247314C1 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ ВОЗДУШНО-ДИНАМИЧЕСКОГО РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2255299C1 |
| АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ, С ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2006 |
|
RU2339904C2 |
| Воздушно-динамический рулевой привод | 2023 |
|
RU2822637C1 |
| САМОНАВОДЯЩАЯСЯ АВИАЦИОННАЯ БОМБА, СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ | 2002 |
|
RU2204796C1 |
Предлагаемая группа изобретений относится к области высокоточного оружия для авиационной техники. Изобретения могут быть использованы в качестве: способа инициирования воздушно-динамических рулевых приводов (далее по тексту - ВДРП) преимущественно управляемой авиабомбы (УАБ), а также управляемых снарядов и ракет авиационных комплексов высокоточного оружия; реализующего заявляемый способ устройства инициирования ВДРП перед сбросом УАБ с носителя (самолет, вертолет, БПЛА); способа проверки готовности электрических цепей ВДРП перед сбросом УАБ с носителя; ВДРП для УАБ, конструктивно объединяющего заявляемые устройства; аппаратуры управления, реализующей заявляемый способ проверки готовности электрических цепей ВДРП перед сбросом УАБ с носителя. Одна из важнейших задач, решаемых при разработке УАБ, - обеспечение безопасности носителя при сбросе УАБ с подкрыльевой (подфюзеляжной) подвески или из бомболюка. Обязательные условия ее выполнения включают: отсутствие отделяемых от УАБ конструктивных элементов при сбросе и в процессе приведения системы управления в рабочее состояние, что исключает возможность попадания инородных тел в двигатели носителя; проверку готовности электрических цепей системы управления УАБ, в том числе и рулевых приводов, к сбросу, что обуславливает движение УАБ с момента отделения от носителя в соответствии с командами системы управления; разгерметизацию пневмосистемы ВДРП и разарретирование аэродинамических рулей УАБ до сброса, что определяет возможность управления траекторией ее движения с момента отделения по командам системы управления для исключения возможного столкновения с носителем под действием обтекающего воздушного потока в условиях интенсивных интерференционных возмущений. 5 н.п. ф-лы, 8 ил.
1. Способ инициирования воздушно-динамического рулевого привода управляемой авиабомбы, включающий инициирование функциональных устройств системы управления авиабомбы после задействования бортовой батареи, отличающийся тем, что перед сбросом авиабомбы электрические цепи воздушно-динамических рулевых приводов задействуют от электрической сети носителя и осуществляют их проверку с формированием электрического сигнала готовности, при наличии которого производят задействование бортовой батареи от электрической сети носителя, после чего разарретирование аэродинамического руля и разгерметизацию пневмосистемы воздушно-динамического рулевого привода производят одновременно по сигналу бортовой системы управления с формированием сигнала, разрешающего сброс авиабомбы.
2. Устройство инициирования воздушно-динамического рулевого привода управляемой авиабомбы, размещенного в крыле с поворотным закрылком и концевой шайбой, в которой каналами с переднего и донного торца образованы соответственно воздухозаборник и устройство сброса воздуха, отличающееся тем, что концевая шайба выполнена из трех соосных последовательно расположенных вдоль концевой хорды крыла и закрепленных к нему втулок, в передней и задней втулках выполнены соответственно воздухозаборный канал и канал сброса воздуха, в которых установлены носовой и донный клапаны, жестко связанные передним и задним штоками с поршнем газового двигателя, рабочая камера которого образована во внутренней полости средней втулки и сообщена отверстием с камерой установленного на средней втулке электровоспламенителя, при этом на заднем штоке донным клапаном закреплена жестко связанная срезным штифтом с задней втулкой крестовина, одна из образующих которой установлена в торцевом пазу оси закрылка, а на жестко связанном со средней втулкой диэлектрическом основании установлены контакты, взаимодействующие с контактами, закрепленными на переднем штоке, выполненном с уступом перед герметизирующей рабочую камеру газового двигателя и установленной в средней втулке заглушкой, расстояние от торца которой до уступа переднего штока равно величине рабочего хода поршня газового двигателя.
3. Способ проверки готовности воздушно-динамического рулевого привода перед сбросом управляемой авиабомбы, включающий подачу питания на аппаратуру управления воздушно-динамического рулевого привода от внешнего источника электропитания и формирование аппаратурой управления сигнала на электромагниты пневмораспределительного устройства воздушно-динамического рулевого привода, отличающийся тем, что подачу электропитания на систему управления авиабомбы и аппаратуру управления воздушно-динамического рулевого привода осуществляют от электрической сети носителя, при этом в системе управления авиабомбы формируют сигнал проверки готовности воздушно-динамического рулевого привода, в соответствии с которым аппаратура управления воздушно-динамического рулевого привода вырабатывает высокочастотный сигнал, по реакции на который электрических цепей электромагнитов пневмораспределительного устройства воздушно-динамического рулевого привода аппаратура управления формирует электрический сигнал готовности в систему управления авиабомбы.
4. Воздушно-динамический рулевой привод, содержащий крыло с поворотным закрылком, выполненное с концевой шайбой и профильным уступом со стороны бортовой хорды, размещенный в сквозном окне крыла пневмодвигатель, закрепленный к крылу со стороны концевой хорды пневмораспределитель и рычажную передачу от выходного вала пневмодвигателя к оси закрылка, расположенную со стороны профильного уступа, отличающийся тем, что в него введены аппаратура управления, выходной разъем и датчик угла, при этом аппаратура управления размещена в выполненной на поверхности крыла и расположенной перед пневмодвигателем полости, герметизированной крышкой, а на профильном уступе крыла установлены выходной разъем и датчик угла, на оси которого закреплен рычаг со сферическим пальцем, размещенным в пазу рычага пневмодвигателя и установленным в пазу вилки, закрепленной на рычаге пневмодвигателя, причем электрические соединения выполнены П-образным проводным жгутом, концы которого закреплены на концевой шайбе и профильном уступе крыла, а средняя часть размещена в сквозном отверстии, выполненном по размаху крыла от плоскости концевой хорды крыла до плоскости его профильного уступа через полость под аппаратуру управления.
5. Аппаратура управления воздушно-динамическим рулевым приводом авиабомбы, содержащая последовательно соединенные сумматор, первый вход которого соединен с выходом генератора вынужденных колебаний, второй - с выходом системы управления авиабомбы, третий - с выходом датчика обратной связи привода, релейный элемент и усилитель мощности, выходы которого соединены с обмотками электромагнита пневмораспределительного устройства привода, отличающаяся тем, что в нее введены силовой электронный ключ, триггер и логический элемент «И», усилитель мощности выполнен в виде двух электронных ключей, коммутационные входы которых соединены с первой шиной питания аппаратуры управления, выходы - с обмотками электромагнита, соединенными вторыми выводами с общей для системы управления авиабомбы и аппаратуры управления второй шиной питания аппаратуры управления, причем управляющий вход первого электронного ключа соединен с выходом релейного элемента, а управляющий вход второго электронного ключа соединен с выходом релейного элемента через инвертор, при этом управляющий вход силового электронного ключа соединен с выходом системы управления авиабомбы, коммутационный вход - с первой шиной электропитания системы управления авиабомбы, выход - с первой шиной питания аппаратуры управления, а первый вход логического элемента «И» соединен с выходом первого электронного ключа, второй вход через триггер - с выходом второго электронного ключа, выход - с входом системы управления авиабомбы.
| СПОСОБ ИНИЦИИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ АРТИЛЛЕРИЙСКОГО СНАРЯДА, БАЛЛИСТИЧЕСКИЙ КОЛПАК И ДИСТАНЦИОННАЯ ТРУБКА УПРАВЛЯЕМОГО АРТИЛЛЕРИЙСКОГО СНАРЯДА | 2000 |
|
RU2192615C2 |
| ХВОСТОВОЙ ОТСЕК ВОЗДУШНО-ДИНАМИЧЕСКИХ РУЛЕВЫХ ПРИВОДОВ ДЛЯ УПРАВЛЯЕМЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ПРЕИМУЩЕСТВЕННО ДЛЯ УПРАВЛЯЕМЫХ АВИАЦИОННЫХ БОМБ) И ПНЕВМОДВИГАТЕЛЬ РУЛЕВОГО ПРИВОДА | 2009 |
|
RU2418261C2 |
| СПОСОБ ПРОВЕРКИ КАЧЕСТВА ФУНКЦИОНИРОВАНИЯ РУЛЕВЫХ ПРИВОДОВ И АВТОПИЛОТОВ УПРАВЛЯЕМЫХ СНАРЯДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2181681C2 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| УПРАВЛЯЕМЫЙ АРТИЛЛЕРИЙСКИЙ СНАРЯД | 2004 |
|
RU2258897C1 |
| Управляемый снаряд, блок рулевого привода управляемого снаряда, пневмораспределительное устройство рулевого привода управляемого снаряда, механизм инициирования рулевого привода управляемого снаряда | 2017 |
|
RU2669979C1 |
| Способ пропорционального управления воздушно-динамическим рулевым приводом ракеты и устройство для его реализации | 2016 |
|
RU2630462C1 |
| СПОСОБ ПРОВЕРКИ ПРИВЕДЕНИЯ В РАБОЧЕЕ СОСТОЯНИЕ ГЕРМЕТИЧНОГО АВТОПИЛОТНОГО БЛОКА | 1997 |
|
RU2126949C1 |
| Способ управления беспилотным летательным аппаратом и блок рулевых приводов для его осуществления | 2016 |
|
RU2634609C1 |
| СПОСОБ РАСКРЫТИЯ РУЛЕЙ БЛОКА РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА И БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2237598C2 |
| КОМБИНИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ КОРРЕКТИРУЕМОЙ АВИАЦИОННОЙ БОМБОЙ | 2011 |
|
RU2489675C2 |
| DE 60316848 D1, 22.11.2007. | |||

