Настоящее изобретение предназначено для определения местоположения источников ионизирующих излучений на электронной карте автоматизированного рабочего места оператора мобильного комплекса радиационного контроля (РК).
Изобретение относится к области РК и предназначено для поиска (обнаружения и определения местоположения) источников ионизирующих излучений (ИИИ) мобильными комплексами РК в случае радиационных аварий, утери или незаконного обращения с ИИИ и радиоактивными отходами, при проведении радиационного мониторинга территорий промышленных, гражданских и военных объектов.
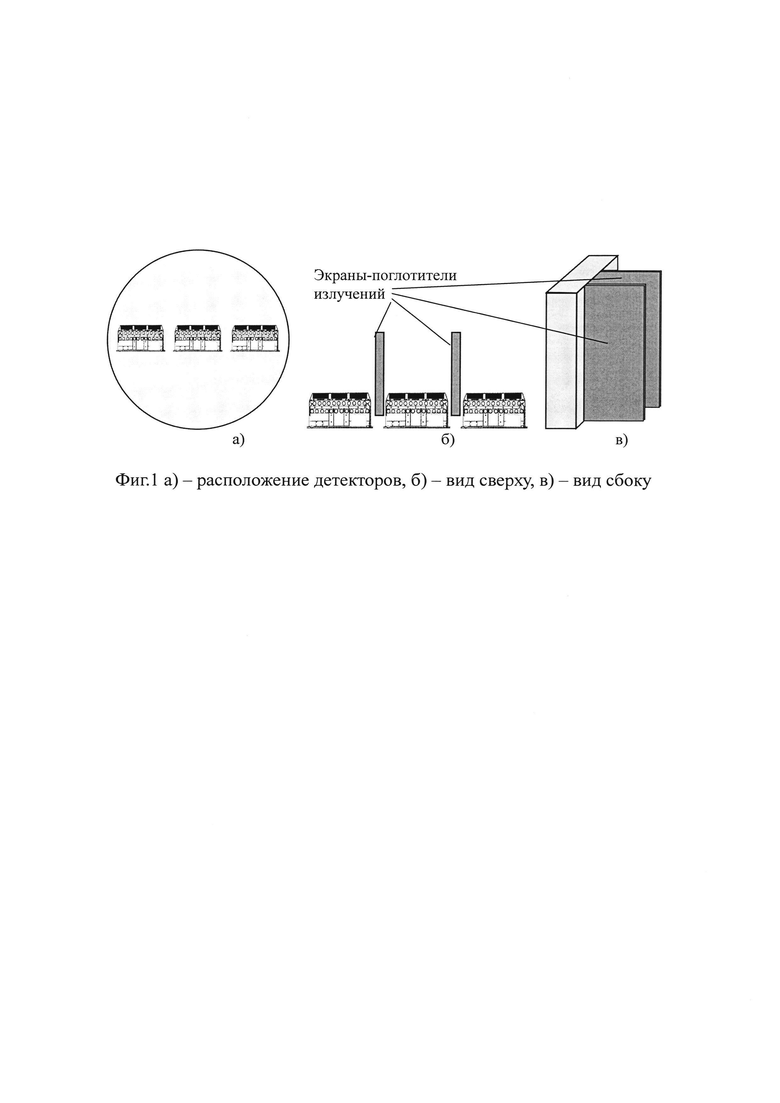
Сущность изобретения заключается в том, что предлагается способ локализации ИИИ с использованием штатной детектирующей аппаратуры комплекса РК, дополненной экранами-поглотителями для достижения анизотропии регистрации излучений. Три плоских широкоугольных детектора расположены на поворотной платформе (фиг. 1а), экраны-поглотители установлены между детекторами и имеют габариты, обеспечивающие анизотропию регистрации потока излучения (фиг. 1б - вид сверху, 1в - вид сбоку).
Такой подход позволяет вычислить пеленг на ИИИ по двум измерениям, выполненным с поворотом платформы на угол Δ. Локализация ИИИ обеспечивается определением точки пересечения обнаруженных линий-направлений на ИИИ из двух различных мест проведения измерений.
Технический результат: создание оперативного способа пеленгации и определения местоположения (локализации) ИИИ.
Известен способ поиска и обнаружения ИИИ (патент РФ №2242024, «Способ поиска и обнаружения источников ионизирующих излучений», Бюл. №34 от 10.12.2004 г.).
Способ основан на превышении порога, рассчитанного на основании критерия Неймана-Пирсона для установленной вероятности ложной тревоги.
При обнаружении ИИИ с помощью спутниковой навигационной системы (СНС) на электронной карте местности фиксируют координаты носителя комплекса. Определяют линию-направление на обнаруженный ИИИ как перпендикуляр к борту носителя (или к участку трассы). Эту линию наносят на электронную карту. Определение местоположения обнаруженного ИИИ осуществляют по пересечению не менее двух линий-направлений на ИИИ, определенных в разных точках трассы в пределах «видимости» ИИИ.
Точность этого способа невысока, т.к. устройства детектирования имеют широкоугольную диаграмму направленности (180° и более), и истинное направление на ИИИ может отличаться от перпендикуляра к борту носителя комплекса на десятки градусов.
Так как экспозиция измерений выбирается в зависимости от скорости ТС и предполагаемого расстояния до источника, это может привести к пропуску искомого ИИИ. Кроме того, для компенсации влияния флуктуаций радиационного фона во избежание ложных срабатываний чувствительность загрубляют, что также может привести к ошибкам обнаружения.
Еще одним недостатком является то, что радиационный контроль осуществляют с того борта по движению носителя, на котором установлена детектирующая аппаратура. Для контроля по обоим бортам требуется удвоение количества УД.
Известен патент РФ №98823 «Мобильный комплекс радиационного контроля», Бюл. №30 от 27.10.2010 г., состоящий из детектирующей системы, включающей пластиковый гамма-детектор с широкоугольной диаграммой направленности и сканирующий гамма-детектор с углом поля зрения 30°, установленный на вращающейся платформе. В комплексе применен способ поиска, обнаружения и локализации источников гамма-излучения в два этапа. На первом этапе осуществляют поиск, обнаружение и предварительная локализация обнаруженного гамма-источника пластиковым гамма-детектором с использованием способа, например, по патенту РФ №2242024. После объезда контролируемой зоны информацию гамма-детекторов, видеоканала и данные спутниковой навигационной системы и картографии обрабатывают. В результате анализа определяют координаты точек по маршруту движения комплекса с превышением установленного порога, ориентировочную дальность r0 до предполагаемого гамма-источника (с погрешностью ± 40%) и ориентировочное направление на предполагаемый гамма-источник (как перпендикуляр к борту носителя комплекса).
На втором этапе (этапе локализации) выполняют повторное обследование тех же точек на трассе с помощью сканирующего гамма-детектора с целью уточнения направления на обнаруженный ранее источник гамма-излучения. Для каждой точки сканирование проводят два раза: с позиций до нее на расстоянии не менее r0 и после нее - на такую же величину. По двум полученным линиям-направлениям расчетным путем получают на карте точку пересечения - положение источника гамма-излучения. Точность локализации источника при этом получается выше, чем на первом этапе.
Необходимо отметить, что для успешного решения задачи на втором этапе необходимо, чтобы чувствительность сканирующего детектора была не хуже не сканирующего. Тем более что сканирование производят, не доезжая до точки обнаружения на расстояние r0, а затем, еще раз, через такое же расстояние. Дистанция измерений вырастает в 1.4 раза 
Недостатком данного подхода является сложность в реализации процесса поиска, обнаружения и локализации гамма-источников и низкая оперативность получения информации.
Предложенный способ поиска, обнаружения и локализации ИИИ применительно к комплексу по патенту РФ №98823, определяет наличие источников гамма-излучения только по одну сторону трассы, что ограничивает его применение. Реализация способа требует высокой квалификации оператора, особенно при анализе результатов первого этапа и принятии решения.
Известен патент РФ №2456638 «Способ поиска и обнаружения источников ионизирующих излучений», Бюл. №20 от 20.07.2012 г., используемый в мобильном комплексе «Соратник-01».
В комплексе «Соратник-01» используются гамма-нейтронные устройства детектирования с широкоугольными диаграммами направленности (больше 180°) за счет установки на их тыльной стороне экранов - поглотителей излучений для гамма-счетных детекторов и замедлителей нейтронов из водородосодержащих материалов - для нейтронных детекторов. Устройства детектирования установлены на поворотной платформе, благодаря которой их входные окна могут быть направлены или на правый борт, или на левый борт, или на корму носителя комплекса.
В способе, изложенном в патенте РФ №2456638, исключена возможность пропуска сигнала, как в способе патента РФ №2242024. Это достигается последовательным перебором экспозиции измерений (в 1,3 раза от минимального значения до некоторого максимума), что равносильно пропорциональному увеличению расстояния до искомого ИИИ. Благодаря этому уменьшается вероятность пропуска сигнала и появляется возможность оценки дальности до обнаруженного ИИИ с погрешностью, не превышающей 40%. В остальном поиск и обнаружение ИИИ осуществляются аналогично алгоритму патента РФ №2242024.
Несмотря на наличие в РК «Соратник-01» поворотной платформы, направление на обнаруженный ИИИ определяется как перпендикуляр к трассе (или к борту носителя, по которому обнаружен источник), так как способ не дает алгоритма определения направления на обнаруженный ИИИ. Как было показано выше, при этом возникает погрешность локализации обнаруженного ИИИ из-за широкоугольной диаграммы направленности устройств детектирования, и истинное направление на ИИИ может отличаться от перпендикуляра к борту носителя комплекса на десятки градусов.
Известен патент РФ №2562142 «Способ поиска, обнаружения и локализации ИИИ», Бюл. №25 от 10.09.2015 г. Способ заключается в определении точки пересечения обнаруженных линий-направлений на искомый ИИИ из двух различных мест измерения. На поворотной платформе устанавливаются не менее двух одинаковых устройств детектирования (УД), снабженных экранами-поглотителями излучения, с направленными в противоположные стороны входными окнами, образующими острый двугранный угол.
Каждое УД измеряет среднюю скорость счета аддитивной суммы сигнала и фона за некоторое время экспозиции. После чего определяется разность полученных значений. Ненулевое значение разности означает факт обнаружения ИИИ. Поворотом платформы стараются достичь минимум этой величины, и по углу поворота платформы определяют направление на обнаруженный ИИИ.
На открытой местности такой подход мало зависит от временных и пространственных флуктуаций радиационного фона, поскольку сигнал получен дифференциальным методом.
Недостатком указанного подхода является то, что в представленной конфигурации детекторы эффективно контролируют пространство лишь на этапе поиска ИИИ (справа или слева борта комплекса). На втором этапе после поворота платформы в сторону источника эффективность детектирования заметно снижается, так как излучение приходит не перпендикулярно поверхности, а под острым углом к ней. Снижение эффективности регистрации излучения слабого или удаленного ИИИ может стать причиной неверного определения искомого направления.
Развитием этого подхода является наиболее близкий к предлагаемому изобретению патент РФ №2655044 «Способ поиска источников ионизирующих излучений», Бюл. №15 от 23.05.2018 г.
Решение задачи достигается тем, что поиск ИИИ осуществляют в два этапа: сначала решают задачу обнаружения ИИИ, а затем - задачу локализации обнаруженного ИИИ. Решение обеих задач осуществляют при помощи одной и той же детектирующей аппаратуры, при этом ее структура изменяется применительно для каждого этапа работы. Детектирующая аппаратура состоит из четного количества (двух или более) одинаковых широкоугольных детекторов, имеющих экраны-поглотители излучения. Входные окна детекторов направлены в противоположные стороны и образуют острый двугранный угол с биссекторной плоскостью, проходящей через нулевую риску поворотной платформы.
Недостатки указанного подхода аналогичны недостаткам способа, указанного в патенте РФ №2562142. В режиме локализации при повороте платформы на ИИИ эффективность плоских детекторов снижается, так как излучение падает на поверхность детектора под острым углом. Кроме этого, проводится контроль разностного сигнала детекторов. Поэтому надежное обнаружение источника возможно, только если экспозиция каждого измерения будет больше экспозиции на этапе поиска ИИИ. А так как при повороте платформы измерения проводятся много раз, процесс определения направления может занимать довольно длительное время.
Задачей предлагаемого изобретения является создание способа локализации ИИИ, позволяющего при сохранении точности определения направления сократить время локализации ИИИ.
Для пеленгации ИИИ на местности применяют специализированные многомодульные детектирующие системы, обладающие анизотропной чувствительностью (панорамные датчики), и детекторы телескопического типа [6]. Достоинствами систем детекторов с анизотропной чувствительностью является высокая эффективность регистрации излучений, возможность определения углового распределения потока излучения, сравнительно небольшие размеры и масса. Такой метод определения направления на источник излучения оказывается эффективным в тех случаях, когда скорость счета от источника сравнима со скоростью счета фона. Применительно к существующим комплексам радиационного контроля, это требует глубокой модернизации всего детекторного оснащения. Предлагаемый способ локализации ИИИ опирается на использование штатной детектирующей аппаратуры комплекса РК, дополненной экранами-поглотителями для достижения анизотропии регистрации излучений.
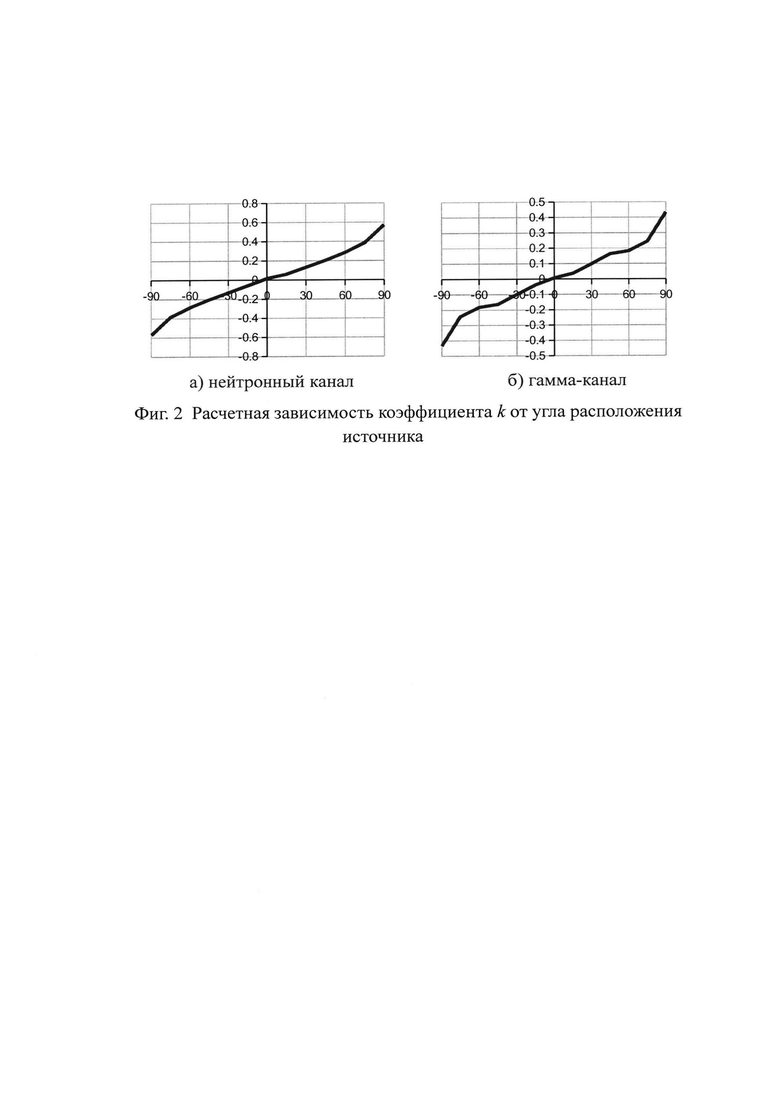
Решение поставленной задачи достигается тем, что определение направления на ИИИ осуществляется двумя измерениями, а угол пеленга определяется расчетным способом по предлагаемой формуле (2). Данная формула получена путем анализа результатов математического моделирования отклика системы гамма и нейтронных детекторов, установленных в ряд на поворотной платформе (фиг. 1) с использованием программного комплекса MCNP [7].
Зависимость k от угла расположения источника относительно центральной оси комплекса радиационного контроля (фиг. 2) близка к линейной как по нейтронному, так и по гамма-каналу.

где φ1, φ2, φ3 - плотность потока, измеренного первым, вторым и третьим детектором.
Это позволяет определить направление на источник по двум измерениям.
После первого измерения становится известным направление вращения платформы для проведения второго измерения. Поворот производят в сторону детектора с большим счетом на угол Δ (30°<Δ<120°).
После второго измерения возможно определить угол направления на источник α (относительно θ1):

где Δ - угол поворота платформы между двумя измерениями; k(θ1) - величина k для первого измерения; k(θ2) - величина k для второго измерения. Если первое измерение проводится из исходного положения (без поворота платформы), то угол α совпадает с углом пеленга ω. Иначе - угол пеленга вычисляется по формуле:

где θ1 - угол поворота платформы при первом измерении.
Таким образом, способ заключается в выполнении следующей последовательности операций.
1. В режиме поиска комплекс РК в начале производит определение скорости счета фона по нейтронному и гамма-каналу для каждого детектора.
2. При появлении ИИИ в зоне чувствительности детекторов комплекс РК останавливается и переходит к локализации обнаруженного источника в точке 1.
3. Производится первое измерение скорости счета детекторов N1, N2 и N3 за время экспозиции tэксn по гамма и/или нейтронному каналу. При этом угол поворота платформы фиксируется в программном обеспечении ПЭВМ как θ1. В режиме локализации ИИИ время экспозиции может превышать tэксn в режиме поиска.
Так как значения N1, N2 и N3 являются аддитивной смесью сигнала и фона, и каждый детектор имеет свою чувствительность ηi, значение плотности потока излучения обнаруженного ИИИ в каждом детекторе определяется по формуле:

Ni - скорость счета i-го детектора комплекса РК;
Nфi - скорость счета i-го детектора, зафиксированная i-м детектором при проведении фоновых измерений на этапе поиска;
ηi - чувствительность i-го детектора.
4. Вычисляется значение коэффициента k(θ1) по формуле (1).
5. Производится поворот платформы на угол Δ(30°<Δ<120°) в сторону детектора с большим счетом. На практике наиболее удобным является поворот платформы на угол Δ=90°.
6. Новое положение платформы фиксируется в программном обеспечении ПЭВМ как θ2=θ1+Δ.
7. Производится второе измерение скорости счета детекторов N1, N2 и N3 за время экспозиции tэксn по гамма и/или нейтронному каналу.
8. Вычисляется значение коэффициента k(θ2) по формулам (1,4).
9. Определяется угол направления на источник α (относительно θ1) по формуле (2).
10. На карте местности, заложенной в компьютер, средствами программного обеспечения наносится пеленг на обнаруженный ИИИ.
11. Платформа с детекторами возвращается в исходное положение, и комплекс РК перемещается для проведения измерений в точке 2, в которой ИИИ также обнаруживается.
12. Действия по пунктам 2-10 повторяются в новом местоположении комплекса РК.
13. Точка пересечения линий пеленгов определяет координаты обнаруженного ИИИ.
Координаты «точки обнаружения» на трассе определяются с помощью современной спутниковой навигационной системы (GPS или ГЛОНАСС), работа которой синхронизируется с работой детектирующей системы средствами прикладного программного обеспечения.
Предложенный способ обладает дополнительными преимуществами в сравнении с аналогами.
1. В описываемом способе поиска и локализации использовано предположение о том, что на длине отрезка контролируемой зоны поиска и локализации может находиться только один точечный источник ИИ. Такое предположение принято для упрощения описания способа. Однако реально в зоне контроля может находиться несколько точечных источников ИИ. Учитывая, что в большинстве практических случаев трасса контроля оказывается достаточно протяженной, и источники сильно разнесены, предлагаемый способ может быть применен и для упомянутого случая локализации нескольких источников ИИ без дополнительных усложнений.
2. Разработан дополнительный модуль ПО РК, реализующий алгоритм определения пеленга ИИИ. Оператор АРМ получает информацию счета детекторов в режиме реального времени, и по результатам двух измерений определяет на электронной карте координаты обнаруженного ИИИ. Это позволяет существенно снизить время локализации источника и, следовательно, повысить оперативность выполнения задач подразделениями специального контроля.
3. Применимость нового подхода подтверждена натурными измерениями. Апробация нового способа ускоренного обнаружения и пеленгации ИИИ
в полевых условиях показала точность до 20° по нейтронному каналу и до 10° по гамма-каналу.
Список источников
1. Способ поиска и обнаружения источников ионизирующих излучений. // Л.В. Викторов, К.В. Ивановских, Ю.Г. Лазарев, В.Л. Петров, А.С.Шеин, Б.В. Шульгин. Патент РФ №2242024, Бюл. №34 от 10.12.2004 г.
2. Мобильный комплекс радиационного контроля. // А.С.Шеин, Л.В. Викторов, В.Л. Петров, Б.В. Шульгин. Полезная модель к патенту РФ №98823 U1, Бюл. №30 от 27.10.2010 г.
3. Способ поиска и обнаружения источников ионизирующих излучений. // А.С.Шеин, Л.В. Викторов, Г.А. Кунцевич, В.Л. Петров, Б.В. Шульгин Патент РФ №2456638, Бюл. №20 от 20.07.2012 г.
4. Способ поиска, обнаружения и локализации ИИИ. // М.Н. Благовещенский, А.А. Кулизнев, И.Н. Разумова, О.Н. Шутов. Патент РФ №2562142, Бюл. №25 от 10.09.2015 г.
5. Способ поиска источников ионизирующих излучений. // М.Н. Благовещенский, А.А. Кулизнев, И.Н. Разумова, О.Н. Шутов. Патент РФ №2655044, Бюл. №15 от 23.05.2018 г.
6. Петров, В.Л., Методы и средства обнаружения делящихся материалов: лабораторный практикум / В.Л. Петров. - Екатеринбург: Изд-во Урал. ун-та, 2017. - 99 с.
7. MCNP - A general Monte Carlo N-particle transport code, version 5 / under the editorship of F.B. Brown. - Los Alamos: LANL, 2003. – 484 p.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ поиска источников ионизирующих излучений | 2017 |
|
RU2655044C1 |
| СПОСОБ ПОИСКА, ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2014 |
|
RU2562142C1 |
| Роботизированный поиск источников ионизирующего излучения на местности | 2023 |
|
RU2836638C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2022 |
|
RU2785525C1 |
| Способ обнаружения и локализации подвижных источников ионизирующих излучений | 2018 |
|
RU2680671C1 |
| Способ поиска и обнаружения источников ионизирующих излучений с анализом времени регистрации частиц | 2025 |
|
RU2840106C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2011 |
|
RU2456638C1 |
| Способ автоматического определения местоположения точечного источника гамма-излучения на местности | 2016 |
|
RU2620451C1 |
| Способ определения направления на источник ядерного излучения | 2015 |
|
RU2616088C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТОЧЕЧНОГО ИСТОЧНИКА ГАММА-ИЗЛУЧЕНИЯ | 2011 |
|
RU2481597C1 |
Использование: для локализации источников ионизирующих излучений. Сущность изобретения заключается в том, что путем определения точки пересечения обнаруженных линий-направлений на источник ионизирующего излучения (ИИИ) из двух различных мест проведения измерений с использованием штатной детектирующей аппаратуры мобильного комплекса радиационного контроля, при этом между гамма-нейтронными детекторами, установленными на поворотной платформе, устанавливают экраны-поглотители, обеспечивающие анизотропию регистрации излучений, а пеленг на ИИИ в каждом месте проведения измерений вычисляют по двум измерениям, выполненным с поворотом платформы на угол Δ в сторону детектора с большими показаниями по заданной формуле. Технический результат: обеспечение возможности создания оперативного способа пеленгации и определения местоположения (локализации) источника ионизирующего излучения (ИИИ). 2 ил.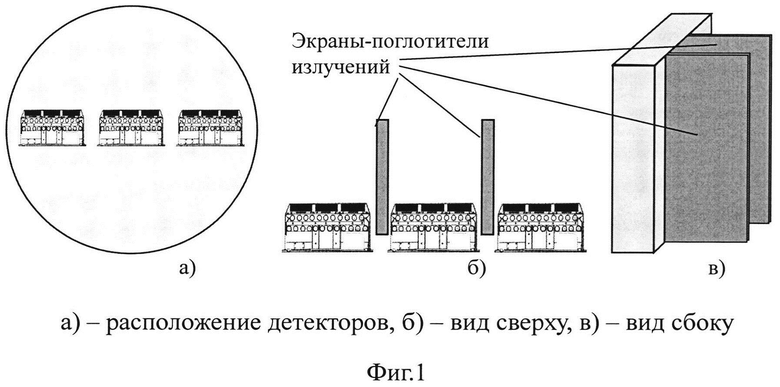
Способ локализации источников ионизирующих излучений путем определения точки пересечения обнаруженных линий-направлений на источник ионизирующего излучения (ИИИ) из двух различных мест проведения измерений с использованием штатной детектирующей аппаратуры мобильного комплекса радиационного контроля, отличающийся тем, что между гамма-нейтронными детекторами, установленными на поворотной платформе, устанавливают специальные экраны-поглотители, обеспечивающие анизотропию регистрации излучений, а пеленг на ИИИ в каждом месте проведения измерений вычисляют по двум измерениям, выполненным с поворотом платформы на угол Δ в сторону детектора с большими показаниями, по формуле
в которой зависимость k от угла расположения источника относительно исходного направления детектирования рассчитывают по формуле
k(θ)=(φ1-φ3)/(φ1+φ2+φ3),
где φ1, φ2, φ3 - плотность потока, измеренного первым, вторым и третьим детектором, k(θ1) - величина k для первого измерения с углом поворота платформы θ1, а k(θ2) - величина k для второго измерения с углом поворота платформы θ2.
| Способ поиска источников ионизирующих излучений | 2017 |
|
RU2655044C1 |
| СПОСОБ ПОИСКА, ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2014 |
|
RU2562142C1 |
| Способ автоматического определения местоположения точечного источника гамма-излучения на местности | 2016 |
|
RU2620451C1 |
| US 5286973 A1, 15.02.1994 | |||
| WO 2002016965 A2, 28.02.2002. | |||

