Предложенное изобретение относится к области радиационного контроля (РК) и предназначено для поиска (обнаружения и определения местоположения) источников ионизирующих излучений (ИИИ) наземными мобильными комплексами РК в случае радиационных аварий, утери или незаконного обращения с ИИИ и радиоактивными отходами, при проведении радиационного мониторинга территорий.
Известны способы поиска ИИИ, используемые в портативных приборах оперативного РК - ручных радиометрах-дозиметрах типа МКС-А02 (руководство по эксплуатации ДЦКИ.411168.002 РЭ, г. Дубна Московской обл., НПЦ «Аспект», 2000 г.), ДРБП-03 (паспорт ГКПС.14.00.00.000 ПС, г. Москва, ВНИИФТРИ, 1996 г.), МКС-06 INSPECTOR (паспорт, г. Москва, ТОО «Грин Стар», 1996 г.) и др., в которых для обнаружения ИИИ используется способ обнаружения, основанный на сравнении измеренного аппаратурой количества импульсов N0 за жестко назначенное время tn контроля с заранее вычисленным порогом обнаружения q0. Порог q0 вычисляют, опираясь на фоновую обстановку до прибытия в зону контроля, по формуле
q0=b⋅tn+m⋅σ,
где b=B/tb - средняя скорость счета фона;
σ=(В)1/2 - среднеквадратическое отклонение величины В, равной измеренному количеству фоновых импульсов за так же жестко заданное время tb;
m - коэффициент (m≥4).
Если N0 больше q0, то принимают решение об обнаружении искомого ИИИ, в противном случае принимают решение о необнаружении.
Недостатком данного способа поиска ИИИ является необходимость предварительного замера фоновых импульсов, а также отсутствие возможности изменения порога q0 в зависимости от реальной фоновой обстановки. Во избежание ложных срабатываний из-за временных и пространственных флуктуаций радиационного фона заранее увеличивают коэффициент m, что приводит к неоправданному завышению порога обнаружения и, соответственно, к пропуску сигнала.
Известны комплексы, содержащие устройства детектирования (УД) гамма-излучения и (или) нейтронного излучения, в которых реализуется патент РФ №2242024, «Способ поиска и обнаружения источников ионизирующих излучений», Бюл. №34 от 10.12.2004 г. Способ основан на критерии Неймана-Пирсона. На основании задаваемой оператором вероятности ложной тревоги α определяют из таблиц для нормального закона распределения порог q0, равный qα. Способ обеспечивает поиск и обнаружение ИИИ при движении носителя комплекса, он принципиально не требует предварительного измерения радиационного фона. Это обеспечивают за счет того, что в процессе движения от начала до конца инспектируемой зоны (трассы) измеряют среднюю скорость счета аддитивной суммы сигнала и фона n(t) на равных интервалах времени экспозиции te. Из значений вектора ni(t), измеренных на каждом i-том интервале, определяют амплитуду сигнала am, среднюю скорость счета фона b и положение сигнала am на шкале времени. По этим данным вычисляют параметры ηi, значение которых сравнивают с порогом q0. Если какой-то параметр ηi больше порога q0, то принимают решение об обнаружении ИИИ на этом i-том интервале, в противном случае - о необнаружении. При обнаружении ИИИ фиксируют с помощью спутниковой навигационной системы (СНС) на электронной карте местности координаты носителя комплекса. Определяют линию - направление на обнаруженный ИИИ как перпендикуляр к борту носителя (или к участку трассы). Эту линию наносят на электронную карту. Определение местоположения обнаруженного ИИИ осуществляют по пересечению не менее двух линий - направлений на ИИИ, определенных аналогичным способом в разных точках трассы в пределах «видимости» ИИИ.
Точность этого способа невысока, т.к. устройства детектирования имеют широкоугольную диаграмму направленности (180° и более), и истинное направление на ИИИ может отличаться от перпендикуляра к борту носителя комплекса на десятки градусов.
Способ имеет существенный недостаток, заключающийся в том, что расстоянию r0, которое определяет эффективную длительность сигнала te, заранее задается некоторое конкретное значение, которое будет отличаться от реальной дальности до обнаруживаемого ИИИ. Чем больше отличие реальной дальности от прогнозируемой величины r0, тем больше будет вероятность пропуска сигнала (необнаружения ИИИ).
Для компенсации влияния флуктуаций радиационного фона загрубляют чувствительность (увеличивают q0) во избежание ложных срабатываний. В статье «Алгоритмы поиска и обнаружения источников» Л.В. Викторова, А.С. Шеина (М74 Мобильные комплексы радиационного контроля. Сборник научных разработок. / Под редакцией профессоров Б.В. Шульгина и А.В. Кружалова. Екатеринбург, УрФУ, 2011 г., 137 с.) на с. 56 показано, что для практического использования критерия Неймана-Пирсона в данном случае необходимо вместо порога q0=qα использовать значение порога обнаружения qp, рассчитанное по формуле:
qp=qα⋅Kƒ+qβ,
где qα и qβ - квантили нормального распределения, соответствующие вероятности ложной тревоги α и вероятности пропуска сигнала β;
Kƒ - коэффициент коррекции порога для учета флуктуации фона,
значения которого приведены в той же статье на стр. 65 для нейтронного фона от 1,0 до 1,3, для гамма-фона - от 1,5 до 2,0.
Из выражения для расчетного порога qp следует, что его величина больше оптимального порога по Нейману-Пирсону в полтора-два раза, что также увеличивает вероятность пропуска искомого ИИИ. Отсюда видно, что задача компенсации фона или адаптация к его изменениям для мобильных комплексов РК является приоритетной.
РК по данному способу осуществляют с того борта по движению носителя, на котором установлена детектирующая аппаратура. Способ обеспечивает повышение производительности инспекции одновременным контролем радиационной обстановки по обоим бортам только за счет удвоения количества УД.
Известен патент РФ №2456638 «Способ поиска и обнаружения источников ионизирующего излучения», Бюл. №20 от 20.07.2012 г., в котором также не требуется предварительное определение скорости счета фона, но в котором, по утверждению авторов, исключена возможность пропуска сигнала из-за жесткого задания интервалов времени экспозиции te, как в способе патент РФ №2242024. Это достигается тем, что обработка вектора n(t) производится последовательным перебором te (последовательно увеличивают te в 1,3 раза от минимального значения до некоторого максимума), что равносильно пошаговому увеличению расстояния до искомого ИИИ, закладываемому в алгоритм. Благодаря этому усовершенствованию способа уменьшается вероятность пропуска сигнала.
А в остальном поиск и обнаружение ИИИ осуществляются аналогично алгоритму патента РФ №2242024. Направление на обнаруженный ИИИ определяют по-прежнему как перпендикуляр к трассе, т.к. способ не дает регулярного алгоритма определения направления на обнаруженный ИИИ. Как было показано выше, при этом возникает погрешность локализации обнаруженного ИИИ из-за широкоугольной диаграммы направленности устройств детектирования, и истинное направление на ИИИ может отличаться от перпендикуляра к борту носителя комплекса на десятки градусов. Здесь, как и в предыдущем способе, из-за загрубления порога обнаружения по Нейману-Пирсону в полтора-два раза также велика вероятность пропуска обнаруживаемого ИИИ и также возможно повышение производительности инспекции только за счет удвоения количества УД.
Известен мобильный комплекс РК (патент РФ №98823, Бюл. №30 от 27.10.2010 г.), состоящий из детектирующей системы, включающей пластиковый гамма-детектор с широкоугольной диаграммой направленности и сканирующий гамма-детектор, построенный на кристалле NaI(Tl). Он помещен в горизонтально расположенный цилиндрический свинцовый экран-поглотитель гамма-квантов (коллиматор) с углом поля зрения 30°, установленный на платформе, которая может совершать периодические колебательные движения с постоянной угловой скоростью относительно вертикальной оси в диапазоне углов не более 180°. В комплексе применен способ поиска, обнаружения и локализации источников гамма-излучения в два этапа. После объезда контролируемой зоны обрабатывают полученную информацию от пластикового гамма-детектора по способу, например, изложенному в патенте РФ №2242024. В связи с сильным влиянием на уровень гамма-фона дорожного покрытия и придорожных сооружений на этом этапе (этапе обнаружения) для «отфильтровывания» ложных сигналов используют данные от дополнительных информационных каналов, в том числе и от видеоканала, и данные СНС в сочетании с картографической информацией. В результате анализа определяют координаты «подозрительных» точек по маршруту движения комплекса и ориентировочную дальность r0 до предполагаемого гамма-источника (с погрешностью ±50%). На втором этапе (этапе локализации) выполняют повторное обследование «подозрительных» точек на трассе с помощью сканирующего гамма-детектора уже для определения направления на обнаруженный ранее источник гамма-излучения. Для каждой точки сканирование проводят два раза: с позиций до «подозрительной» точки на расстоянии не менее r0 и после «подозрительной» точки - на такую же величину. По двум полученным линиям-направлениям получают на электронной карте точку пересечения - положение источника гамма-излучения.
К недостаткам этого способа следует отнести все сказанное выше о способе, изложенном в патенте РФ №2242024, сложность в практической реализации, длительный процесс получения информации о радиационной обстановке, малая производительность РК (локализация только по одному борту носителя комплекса), отсутствие контроля по нейтронному излучению и высокие требования к квалификации оператора комплекса.
Наиболее близким к предлагаемому изобретению является «Способ поиска, обнаружения и локализации ИИИ» (патент РФ №2562142 С1, Бюл. №25 от 10.09.2015 г.), который заключается в определении точки пересечения обнаруженных линий-направлений на искомый ИИИ из двух различных мест с использованием не менее двух установленных на поворотной платформе, кинематически связанной с двигателем, одинаковых устройств детектирования (УД), снабженных экранами-поглотителями излучения с направленными в противоположные стороны входными окнами, образующими острый двугранный угол. При этом измеряют каждым из УД (правым УДR и левым УДL) средние скорости счета аддитивной суммы сигнала и фона - соответственно nR(t) и nL(t) - за некоторое время te. Затем вычисляют разность полученных значений скоростей счета Δn(t)=nR(t)-nL(t), ненулевое значение которой означает факт обнаружения ИИИ, и достигают поворотом платформы с помощью двигателя минимума этой разности, а по углу поворота платформы после окончания переходного процесса определяют направление на обнаруженный ИИИ.
Главным отличием этого способа от указанных выше способов-аналогов является независимость информативного сигнала Δn(t) от радиационного фона и его флуктуаций, как временных, так и пространственных, поскольку он (сигнал) получен дифференциальным методом.
Работа мобильного комплекса по способу-прототипу происходит следующим образом. После прибытия в зону контроля включают по команде «ПОИСК» двигатель поворотной платформы с УД, в результате чего детектирующая система начинает реагировать на изменение радиационной обстановки. Момент захвата цели (появление искомого ИИИ в зоне чувствительности УД) определяют по началу вращения платформы с УД, визуально - по изменению курсового угла цели. При его изменении дают команду на остановку носителя и, после окончания переходного процесса, определяют курсовой угол цели КУ1 - платформа с УД развернется с помощью двигателя в направление источника гамма-излучения. По данным СНС фиксируют курс носителя К1 и его географические координаты в момент остановки и вычисляют пеленг П1 на обнаруженный ИИИ в точке 1 по формуле П1=К1+КУ1, который наносят на карту. Далее по команде оператора комплекс перемещают в направлении, примерно перпендикулярно полученному в первом замере направлению, насколько это позволяют условия местности, и останавливают носитель для проведения измерений в точке 2. Далее по алгоритму, рассмотренному выше, определяют и наносят на карту пеленг П2. Точка пересечения линий пеленгов П1 и П2 определяет координаты цели - местоположения обнаруженного ИИИ.
В реальных условиях эксплуатации при движении носителя с некоторой скоростью v момент захвата цели будет осуществляться с некоторым запаздыванием. Это объясняется следующим. При отсутствии ИИИ в зоне чувствительности УД математическое ожидание (МО) сигнала рассогласования Δn(t)=nR(t)-nL(t) практически равно нулю. При этом отдельные измеренные значения скорости счета в силу вероятностного характера радиоактивного распада будут иметь флуктуации, но они (значения) будут находиться внутри некоторой зоны - зоны нечувствительности, и при этом сигнал на двигатель подаваться не будет, платформа с детектирующей аппаратурой будет неподвижна.
При появлении источника в зоне чувствительности УД МО сигнала Δn(t) в начальный момент будет мало отличаться от нуля, и значительная часть измеренных значений импульсов будет оставаться внутри зоны нечувствительности. Однако появление импульсов, превышающих зону нечувствительности, при этом возможно, и двигатель может начать вращение платформы, но момент наступления такого события случаен, и для повышения вероятности его наступления необходимо некоторое время измерения. Двигатель начнет разворачивать платформу с УД в сторону обнаруженного ИИИ, при этом и без того малый разностный сигнал Δn(t) будет уменьшаться. А это может привести при движении носителя не только к запаздыванию в слежении, приводящему вкупе с инерционностью механической части к отставанию от ИИИ, но и к его потере. Отставание в слежении за обнаруженным ИИИ, а также потеря источника наблюдаются уже при скоростях (4-5) км/ч. Отставание будет тем большим, чем больше будет скорость v носителя и чем меньше расстояние r0 от УД до ИИИ, т.е., чем больше будет относительная угловая скорость ω, равная ν/r0, источника относительно оси вращения платформы с УД. Этого можно избежать, увеличив скорость вращения платформы, что возможно только до определенного предела. Выполнение радиационных измерений - в данном случае формирование сигнала Δn(t) - требует для набора достаточной статистики времени тем большего, чем большая чувствительность требуется от детектирующей системы. Выдавать же управляющее воздействие чаще, чем поступают значения измеряемого параметра, невозможно.
В отличие от аналогов, изменение пространственного радиационного фона от дорожных покрытий не влияет на обнаружительные свойства детектирующей системы комплекса РК при работе по способу-прототипу. Но на отдельные дорожные сооружения (мосты, эстакады), столбы электропередач, искажающие радиационный фон, или на ограниченные зоны флуктуации пространственного радиационного фона, находящиеся вблизи трассы движения носителя, и, естественно, на искомый ИИИ детектирующая система будет реагировать. Платформа с УД начнет вращение, но раньше, чем она успеет развернуться на обнаруживаемый ИИИ, носитель может проехать зону чувствительности детектирующей аппаратуры, и УД перестанут «видеть» источник. А если при этом в зоне «видимости» УД появится посторонний источник достаточной активности в виде, например, опоры моста, то платформа начнет разворот на нее. Внешне реакция комплекса в этом случае будет выглядеть как хаотичные повороты платформы.
На фоне ложных сигналов оператору трудно распознать полезный, на основании которого необходимо остановить носитель и перейти к определению направления на искомый ИИИ. В результате возникают ложные остановки комплекса, существенно снижающие эффективность инспекции.
Отсутствие критерия для надежной фильтрации помех от полезного сигнала, особенно при относительно больших скоростях движения носителя, и отсутствие надежного критерия обнаружения - определения момента остановки носителя для локализации ИИИ, обеспечивающего высокую помехоустойчивость, являются основными недостатками способа-прототипа.
Кроме того, для локализации обнаруженного ИИИ необходимо определение второй линии - направления на обнаруженный ИИИ и понятный алгоритм нахождения координат второй остановки носителя. В способе-прототипе такой алгоритм отсутствует. Время и направление движения носителя от первой до второй остановки оператор должен выбирать сам в зависимости от обстановки. Возможен случай, когда при второй остановке носителя ИИИ выйдет из зоны чувствительности УД, и локализация станет невозможной.
Предлагаемое изобретение устраняет недостатки аналогов и прототипа, его задачей является создание оперативного способа поиска ИИИ одновременно по двум бортам носителя комплекса в условиях нестационарного как временного, так и пространственного радиационного фона; способа, имеющего надежный критерий обнаружения, обеспечивающий высокую чувствительность и помехоустойчивость обнаружения ИИИ при повышенных скоростях движения носителя комплекса, а также определяющего оптимальные моменты времени остановки носителя для локализации обнаруженного ИИИ.
Решение поставленной задачи достигается тем, что поиск ИИИ осуществляют в два этапа: сначала решают задачу обнаружения ИИИ, а затем - задачу локализации обнаруженного ИИИ. При этом решение обеих задач осуществляют при помощи одной и той же детектирующей аппаратуры изменением ее структуры применительно для каждого этапа работы, чем достигается минимизация номенклатуры детектирующей аппаратуры, необходимой для реализации предлагаемого способа.
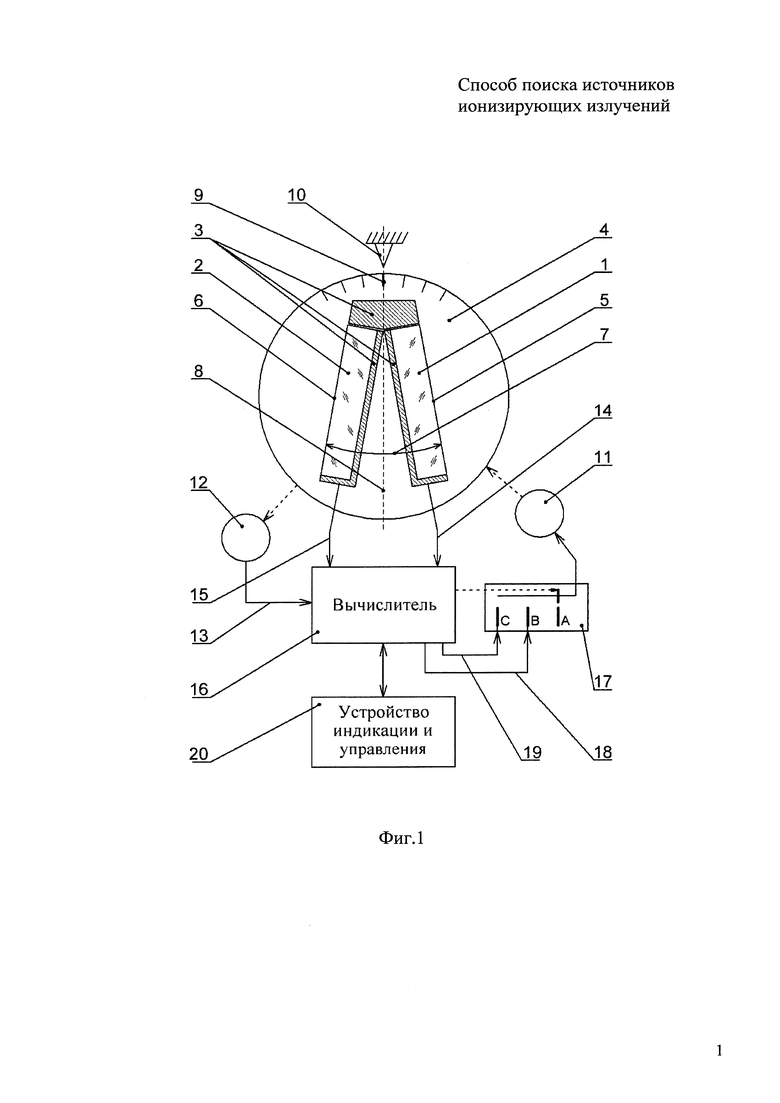
Детектирующая аппаратура состоит (фиг. 1, вид сверху) из четного количества (двух или более) одинаковых широкоугольных УД - правого УДR 1 и левого УДL 2, имеющих экраны-поглотители 3 излучения. Оба УД установлены на поворотной платформе 4 таким образом, что входные окна 5 и 6 направлены в противоположные стороны и образуют острый двугранный угол 2ψ 7 с биссекторной плоскостью 8, проходящей через нулевую риску 9, и ось вращения платформы 4, перпендикулярную плоскости чертежа (на фиг. 1 не показана). Платформа 4 находится в исходном зафиксированном положении, при котором риска 9 совпадает с индексом 10, обозначающим осевую линию носителя комплекса. Платформа 4 может вращаться относительно оси посредством двигателя 11, при этом угол поворота платформы контролируется датчиком угла 12. Сигнал 13 об угле поворота платформы КУ (курсовой угол цели) от датчика 12, а также выходные сигналы средних скоростей счета импульсов (аддитивная сумма сигнала ИИИ и радиационного фона) от УДR 1 nR(t) 14 и от УДL 2 nL(t) 15 поступают на вычислитель 16. Вычислитель, используя и преобразуя эту информацию, управляет через переключатель 17 двигателем 11, подавая на него сигналы 18 и 19, и положением платформы 4 в соответствии с заданным алгоритмом. На устройстве индикации и управления 20 располагаются органы управления и высвечивается информация о состоянии детектирующей системы.
Предлагаемый способ заключается в выполнении следующей последовательности операций.
1. Пусть исходно поворотная платформа 4 с УДR 1 и УДL 2 находится в произвольном положении. Вычислитель 16 определяет курсовой угол КУ положения платформы и в случае, если КУ равен 0, переводит переключатель 17 в положение А, в противном случае - переводит переключатель в положение В, на двигатель 11 подается сигнал 18, при этом поворотная платформа будет вращаться до тех пор, пока курсовой угол КУ не станет равным нулю. При выполнении условия КУ равно 0 вычислитель 16 переводит переключатель 17 в положение А, при котором двигатель обесточен. Детектирующая аппаратура готова к работе в режиме обнаружения. В этом положении биссекторная плоскость между входными окнами УДR и УДL совпадает с продольной осью носителя. Вычислитель вырабатывает сигнал Δn(t) разности средних скоростей счета импульсов (аддитивной суммы сигнала ИИИ и фона) от УДR 1 и от УДL 2, вычисляемых за время te, равное (1-2) с, например, методом скользящего интеграла. Этот сигнал Δn(t)=nR(t)-nL(t) является основным информативным сигналом при работе детекторной аппаратуры на обоих этапах поиска. В нем автоматически компенсируется составляющая, соответствующая средней скорости счета b(t) радиационного фона (подробнее см. патент РФ №2562142 - прототип). Величина сигнала Δn(t) может принимать как положительные, так и отрицательные значения в зависимости от соотношения величин сигналов nR(t) и nL(t), т.е. от того, с какого борта (правого или левого) будет находиться обнаруживаемый ИИИ.
2. В процессе движения носителя параллельно со средним значением сигнала Δn(t) за время te вычисляют среднее значение того же разностного сигнала за фиксированный скользящий интервал времени tb, выбираемый из диапазона (200-300) с для получения статистики требуемого качества, - сигнал Δn(tb), используемый для вычисления порога обнаружения q0.
Учитывая, что в сигналах Δn(t) и Δn(tb) среднее значение скорости счета фона b(t) скомпенсировано, приближенное выражение для среднеквадратического отклонения (СКО) σ(tb) разностного сигнала Δn(tb) примет вид:
При отсутствии ИИИ в зоне чувствительности УД МО сигналов nR(tb) и nL(tb) приближенно принимают равными, что можно записать в следующем виде:

где M(nR(tb)) и M(nL(tb)) - соответственно МО сигналов nR(tb) и nL(tb), осредненных за время tb;
ε - коэффициент, зависящий от идентичности параметров УДR и УДL, выбирается из диапазона от 0,01 до 0,05.
Таким образом, когда M(nR(tb)) и M(nL(tb)) равны, вычислитель 16 будет вырабатывать разностный сигнал Δn(tb), лежащий в диапазоне ±3⋅σ(tb), и тогда в качестве порога обнаружения q0 можно принять:

где m - коэффициент, по умолчанию равный 3.
Тогда условием обнаружения ИИИ является выполнение неравенства

при этом знаку «минус» соответствует обнаружение по левому борту носителя, знаку «плюс» - по правому.
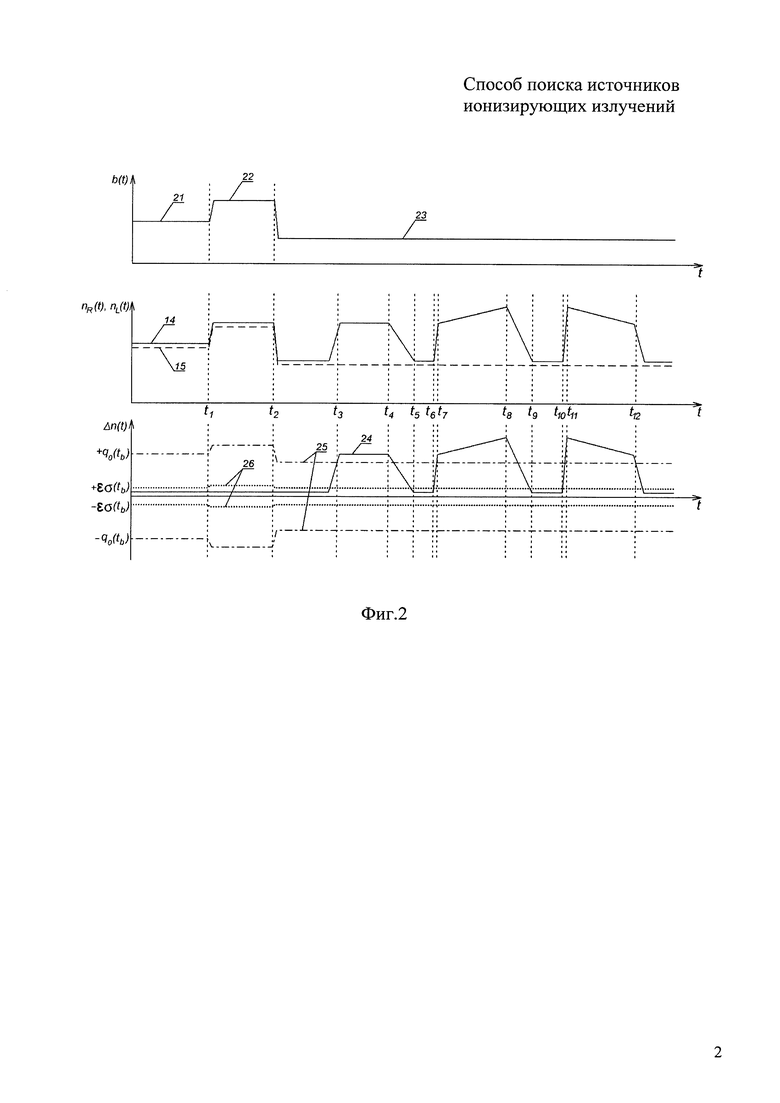
На фиг. 2 показаны графики, схематично иллюстрирующие работу алгоритма поиска ИИИ. На верхнем графике показано изменение скорости счета b(t) в процессе движения комплекса: прямая 21 - стабильный радиационный фон, прямая 22 - носитель въехал в зону повышенной радиации, вызванной нестабильным пространственным радиационным фоном, прямая 23 - отрезок трассы со стабильным радиационным фоном. На среднем графике приведены кривые изменения выходных сигналов скорости счета импульсов от УДR nR(t) 14 и от УДL nL(t) 15. На нижнем графике приведены: сигнал Δn(t) 24, пороги обнаружения ±q0(tb) 25, равные соответственно ±3⋅σ(tb) на основании (**), и зона ±ε⋅σ(tb) 26, характеризующая инструментальную погрешность детектирующей аппаратуры. При этом превышение сигналом Δn(t) величины зоны ±ε⋅σ(tb) означает запрет вычисления нового значения σ(tb), т.к. в этом случае нарушается условие (*), а превышение порогов ±3⋅σ(tb) означает обнаружение ИИИ - выполнение условия (***).
Если величина радиационного фона (в отсутствии ИИИ) увеличится вследствие временной или пространственной флуктуации (на фиг. 2 - момент времени t1), то увеличатся математические ожидания M(nR(tb)) и M(nL(tb)) соответствующих скоростей счета nR(tb) и nL(tb). Среднее значение разностного сигнала Δn(tb) при этом не изменится, и его МО останется близким к нулю, но его СКО - σ(tb) увеличится, что при зафиксированном значении порога q0(tb) может привести к ложным срабатываниям. Для исключения этого порог обнаружения q0 вычисляют постоянно при выполнении условия (*), тем самым достигается адаптация порога обнаружения к флуктуациям радиационного фона за счет изменения σ(tb) и соответствующего изменения величины порогов обнаружения ±q0(tb) 25. На фиг. 2 в момент времени t1 фоновая скорость счета 21 увеличилась до уровня 22, порог 25 увеличился. В момент времени t2 скорость счета фоновых импульсов 22 уменьшилась до уровня 23, порог 25 тоже уменьшился.
При появлении ИИИ в зоне чувствительности УД (момент времени t3), вычисление порога q0 прекращают, используя в качестве порога последнее значение q0, вычисленное при выполнения условия (*), т.е. в момент времени t2.
3. В случае появления ИИИ в зоне чувствительности УД (момент времени t3, источник по правому борту) вычислитель 16 при выполнении условия (***) выработает сигнал «ОБНАРУЖЕНИЕ». По этому сигналу останавливают носитель (отрезок времени t3-t4), считая это первым местом остановки носителя для выполнения следующего этапа поиска - локализации, фиксируют координаты и курс носителя в момент остановки.
4. Переходят в режим локализации, при котором вычислитель 16 переводит переключатель 17 в положение С, подавая на двигатель сигнал 19, разрешающий работу двигателя на выполнение условия Δn(t)=0, т.е. на локализацию обнаруженного ИИИ по способу-прототипу (отрезок времени t4-t5). После выполнении этого условия производят запоминание первого курсового угла КУ1 на обнаруженный ИИИ (отрезок времени t5-t6). На этом отрезке времени МО сигнала Δn(t) находится в зоне ±ε⋅σ(tb).
5. После фиксации КУ1 вычислитель 16 переводит переключатель 17 в положение В, подавая на двигатель сигнал 18, разрешающий работу двигателя до выполнения условия КУ=0, при достижении которого вычислитель 16 переводит переключатель 17 в положение А (отрезок времени t6-t7). Детекторная аппаратура снова готова к работе в режиме обнаружения, биссекторная плоскость входных окон УДR и УДL параллельна продольной оси носителя.
6. Продолжают движение носителя (отрезок времени t7-t8), контролируя выполнение условия (***), при этом постоянно вычисляют текущее значение сигнала Δn(t), сравнивая с его значением от предыдущего измерения до достижения экстремального (максимального при обнаружении ИИИ справа и минимального - слева) значения сигнала Δn(t).
7. После достижения сигналом Δn(t) максимального значения (момент времени t8) останавливают носитель, фиксируют координаты второго места остановки и курс носителя и повторяют действия п. 4, определяя курсовой угол КУ2 на обнаруженный ИИИ из второго места остановки (момент времени t8-t9). После выполнении этого условия производят запоминание второго курсового угла КУ2 на обнаруженный ИИИ (отрезок времени t9-t10).
8. После фиксации КУ2 вычислитель 16 переводит переключатель 17 в положение В, подавая на двигатель сигнал 18, разрешающий работу двигателя до выполнения условия КУ=0, при достижении которого вычислитель 16 переводит переключатель 17 в положение А (отрезок времени t10-t11). Детекторная аппаратура снова готова к работе в режиме обнаружения, биссекторная плоскость входных окон УДR и УДL параллельна продольной оси носителя.
В промежутке между моментами времени t11 и t12 носитель комплекса удаляется от обнаруженного и локализованного ИИИ, при этом скорость счета nR(t) уменьшается, соответственно уменьшается и сигнал Δn(t). В момент времени t12 носитель комплекса отъехал от ИИИ настолько, что детектирующая система перестает его чувствовать.
9. Используя карту местности, на основании данных о координатах мест остановок, курсах носителя К1 и К2, курсовых углах КУ1 и КУ2 наносят из двух известных точек на карте пеленги П1=К1+КУ1 и П2=К2+КУ2 на обнаруженный ИИИ, после чего по точке пересечения пеленгов определяют координаты местонахождения обнаруженного ИИИ.
Таким образом, предлагаемый способ поиска источников ионизирующих излучений обеспечивает работу комплекса в условиях нестационарного как временного, так и пространственного радиационного фона с надежным критерием обнаружения, высокой чувствительностью и помехоустойчивостью обнаружения ИИИ при повышенных скоростях движения носителя комплекса с определением конкретных моментов времени остановки носителя для локализации обнаруженного ИИИ. При этом обеспечивается минимизация номенклатуры детектирующей аппаратуры, необходимой для реализации способа, и повышение производительности инспекции за счет контроля радиационной обстановки одновременно по двум бортам носителя комплекса.
Примеры использования предлагаемого способа.
Пример 1. Малогабаритный мобильный комплекс РК
Устанавливается на автомобили малой грузоподъемности. Предназначен для радиационного мониторинга и картографирования территорий, а также для поиска (обнаружения и локализации) источников гамма-излучения при работе по предлагаемому способу.
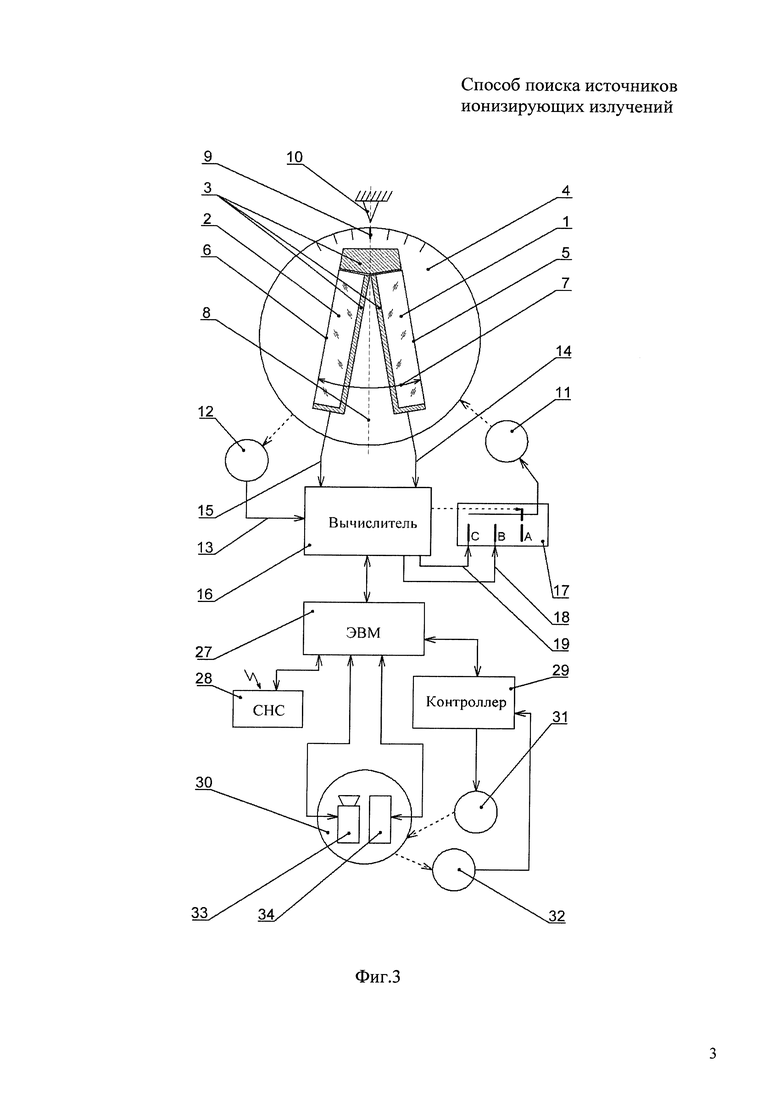
Основная детектирующая аппаратура комплекса состоит (фиг. 3, вид сверху) из четного количества (на фиг. 3 - двух) одинаковых пластиковых сцинтилляционных УД гамма-излучения - правого УДR 1 и левого УДL 2, имеющих свинцовые экраны 3. Оба УД установлены на поворотной платформе 4 таким образом, что входные окна 5 и 6 направлены в противоположные стороны и образуют острый двугранный угол 7 с биссекторной плоскостью 8, проходящей через нулевую риску 9 и ось вращения платформы 4, перпендикулярную плоскости чертежа (на фиг. 3 не показана). Платформа 4 находится в исходном зафиксированном положении, при котором риска 9 совпадает с индексом 10, обозначающим осевую линию носителя комплекса. Платформа 4 может вращаться относительно оси посредством двигателя 11, при этом угол поворота платформы контролируется датчиком угла 12. Сигнал 13 об угле поворота платформы КУ (курсовой угол цели) от датчика 12, а также выходные сигналы средних скоростей счета импульсов от УДR 1 nR(t) 14 и от УДL 2 nL(t) 15 поступают на вычислитель 16. Вычислитель, используя и преобразуя эту информацию, вычисляет среднее значение разностного сигнала Δn(t)=nR(t)-nL(t), а также управляет через переключатель 17 двигателем 11 и положением платформы 4 в соответствии с заданным алгоритмом:
- в положении А переключателя 17 двигатель 11 обесточен, положение платформы 4 зафиксировано;
- в положении В на двигатель поступает сигнал 18, разрешающий работу двигателя на выполнение условия КУ=0 (установку платформы 4 в исходное положение в режиме обнаружения);
- в положении С на двигатель поступает сигнал 19, обеспечивающий работу двигателя на выполнение условия Δn(t)=0, т.е. на локализацию обнаруженного ИИИ.
Для обработки полученной информации, ее визуализации, видеоконтроля, картографии, а также для управления процессом поиска в состав комплекса введена бортовая ЭВМ 27, соединенная каналами связи с вычислителем 16, спутниковой навигационной системой (СНС) 28, контроллером 29, управляющим положением дополнительной платформы 30 через кинематически связанный с ней двигатель 31. Ось вращения платформы 30 (на фиг. 3 не показана) параллельна оси вращения платформы 4, а угловое положение платформы контролируется датчиком угла 32, сигнал с которого поступает на контроллер 29.
Основная детектирующая аппаратура (УДR 1 и УДL 2), установленная на платформе 4, располагается внутри носителя (на фиг. 3 не показан), а платформа 30 с видеокамерой 33 и спектрометрическим УД 34 со встроенным спектрометрическим усилителем - на крыше носителя для обеспечения кругового обзора.
Требуемое угловое положение дополнительной платформы может устанавливаться оператором вручную с ЭВМ через контроллер 29, кроме случаев, указанных ниже (при локализации ИИИ и наборе спектра).
Работа комплекса предусмотрена по обоим бортам носителя. Диапазон курсовых углов цели ±180°, от носа на правый борт (по часовой стрелке) - положительное значение курсового угла цели, на левый борт (против часовой стрелки) - отрицательное значение курсового угла цели. Направление на цель (обнаруженный источник гамма-излучения) определяется устройством автоматически при неподвижном комплексе.
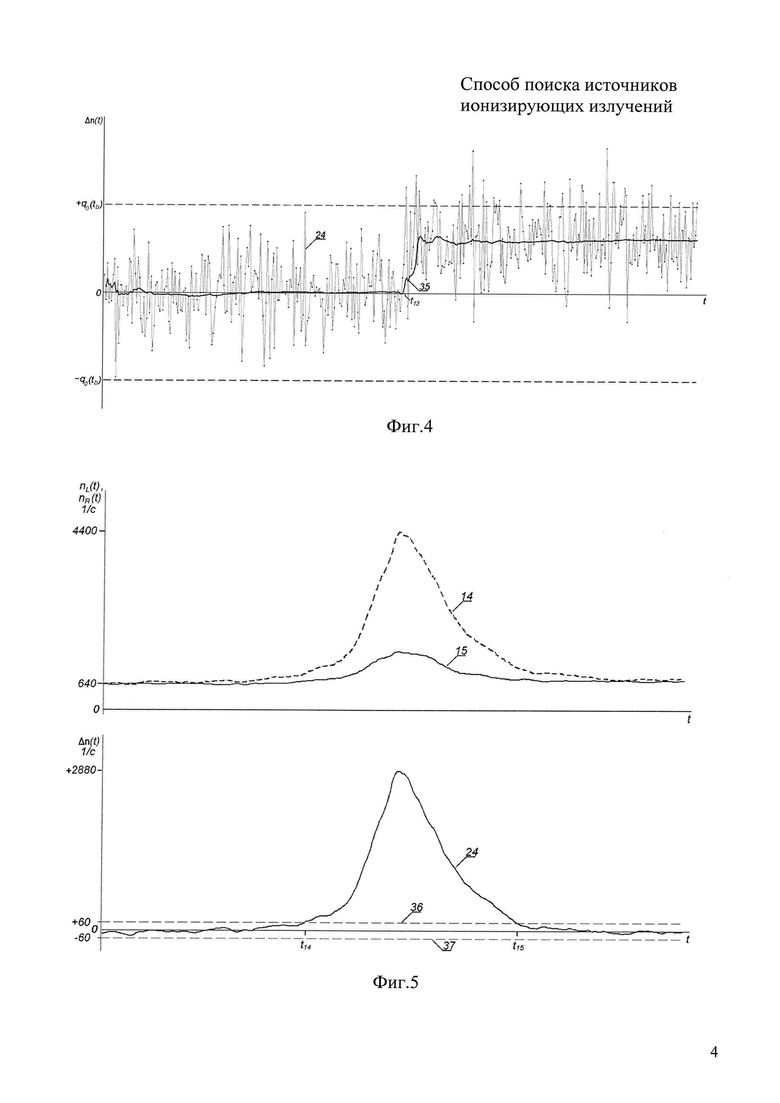
Работа комплекса происходит следующим образом. По прибытии в зону контроля оператор дает команду «ПОИСК». На фиг. 4 показан график изменения разностного сигнала Δn(t) 24 и его МО 35. При отсутствии в зоне чувствительности УД разыскиваемого гамма-источника (отрезок времени 0-t13) МО 35 сигнала Δn(t) 24 приблизительно равно 0, а сам сигнал 24 находится внутри зоны ±q0(tb). В момент t0 захвата цели, например неподвижного источника гамма-излучения по правому борту, МО 35 сигнала Δn(t) 24 будет отлично от нуля, а среднее значение сигнала Δn(t) 24 превысит порог обнаружения, т.е. будет выполняться условие (***). При появлении сигнала «ОБНАРУЖЕНИЕ» оператор дает команду на остановку носителя комплекса. В ЭВМ 27 фиксируется курс носителя К1 до остановки и координаты носителя в момент остановки. Вычислитель 16 переводит переключатель 17 в положение С, подавая на двигатель сигнал 19, разрешающий работу двигателя на выполнение условия Δn(t)=0, т.е. на локализацию обнаруженного ИИИ (отрезок времени t4-t5 на фиг. 2). При этом вспомогательная платформа 30 с видеокамерой 33 и спектрометром 34 разворачивается синхронно с платформой 4 под управлением контроллера 29. После окончания переходного процесса производят запоминание первого курсового угла КУ1 на обнаруженный ИИИ (отрезок времени t5-t6 на фиг. 2), а в спектрометре 34 производится набор спектра для идентификации обнаруженного ИИИ. После определения в первом замере курсового угла КУ1 обнаруженного ИИИ эта информация с датчика угла 12 через 16 передается в компьютер 27, где суммируется с учетом знака с углом курса К1 носителя, полученным по данным СНС. В результате определяется пеленг П1=К1+КУ1 на ИИИ в точке 1.
На карте местности, заложенной в компьютер, средствами программного обеспечения наносится пеленг П1 на обнаруженный ИИИ. После этого вычислитель 16 переводит переключатель 17 в положение В, а затем в положение А (отрезок времени t6-t7 на фиг. 2), при этом набор спектра прекращают и полученную спектрометром 34 информацию передают в ЗВМ 27 для визуализации. Детекторная аппаратура снова готова к работе в режиме обнаружения. Оператор дает команду на продолжение движения носителя (отрезок времени t7-t8 на фиг. 2), контролируя выполнение условия (***), при этом аппаратура постоянно вычисляет текущее значение сигнала Δn(t), сравнивая с его значением от предыдущего измерения до достижения экстремального значения.
После достижения сигналом Δn(t) экстремального значения (момент времени t8 на фиг. 2) по сигналу ЭВМ «ЛОКАЛИЗАЦИЯ» оператор дает команду на вторую остановку носителя, при этом фиксируют координаты второго места остановки и курс носителя и повторяют действия по определению курсового угла КУ2. После чего производят запоминание второго курсового угла КУ2 на обнаруженный ИИИ и повторно (для контроля) определяют спектр обнаруженного ИИИ (отрезок времени t9-t10 на фиг. 2). По алгоритму, рассмотренному выше, определяют и наносят на карту пеленг П2. Точка пересечения пеленгов П1 и П2 определяет координаты цели - местоположения обнаруженного ИИИ.
Образец детектирующей аппаратуры по схеме фиг. 3 на базе двух пластмассовых сцинтилляционных детекторов плотности потока гамма-излучения объемом 2,26 л каждый показал при испытаниях следующие результаты:
1. Обнаружение радионуклида 60Со активностью 1,28⋅105 кБк, расположенного на расстоянии 17 м от трассы движения носителя комплекса по правому борту при скорости движения носителя 12 км/ч на расстоянии 47,5 м. На фиг. 5 показано формирование сигнала Δn(t) 24 из полученных при непосредственном измерении сигналов nR(t) 14 и nL(t) 15 при обнаружении указанного выше радионуклида 60Со. Видно, что до момента обнаружения t14 сигнал Δn(t) 24 не превышает порог +q0(tb) 36, равный 60 с-1, и порог -q0(tb) 37, равный минус 60 с-1. В момент времени t14 выполняется условие (***). Система формирует сигнал «ОБНАРУЖЕНИЕ».
Сравнительный анализ результатов показывает, что отношение «сигнал-фон» для сигнала nR(t) 14 (эквивалентен сигналу способа-аналога) составляет (4400-640)/640=5,875, а для выходного сигнала по предлагаемому способу Δn(t) 24 составляет (2880-60)/60=47, т.е. отношение «сигнал-фон» у предлагаемого способа в 8 раз больше, чем у известных. Это говорит о больших потенциальных возможностях предлагаемого способа поиска ИИИ. В частности, для указанных выше условий обнаружения имеется запас по скорости движения носителя до 30 км/ч, а по дальности обнаружения - на (30-40)%. Погрешность определения углового положения источника 60Со активностью 1,28⋅105 кБк на расстояниях от 20 м до 40,7 м находилась в пределах ±1,5°.
Пример 2. Малогабаритный мобильный комплекс РК
Устанавливается на автомобили малой грузоподъемности. Обеспечивает при работе по предлагаемому способу радиоэкологический мониторинг и радиационное картографирование территорий, поиск (обнаружение и локализацию) утерянных радиоактивных и ядерных материалов по гамма-каналу и нейтронному каналу.
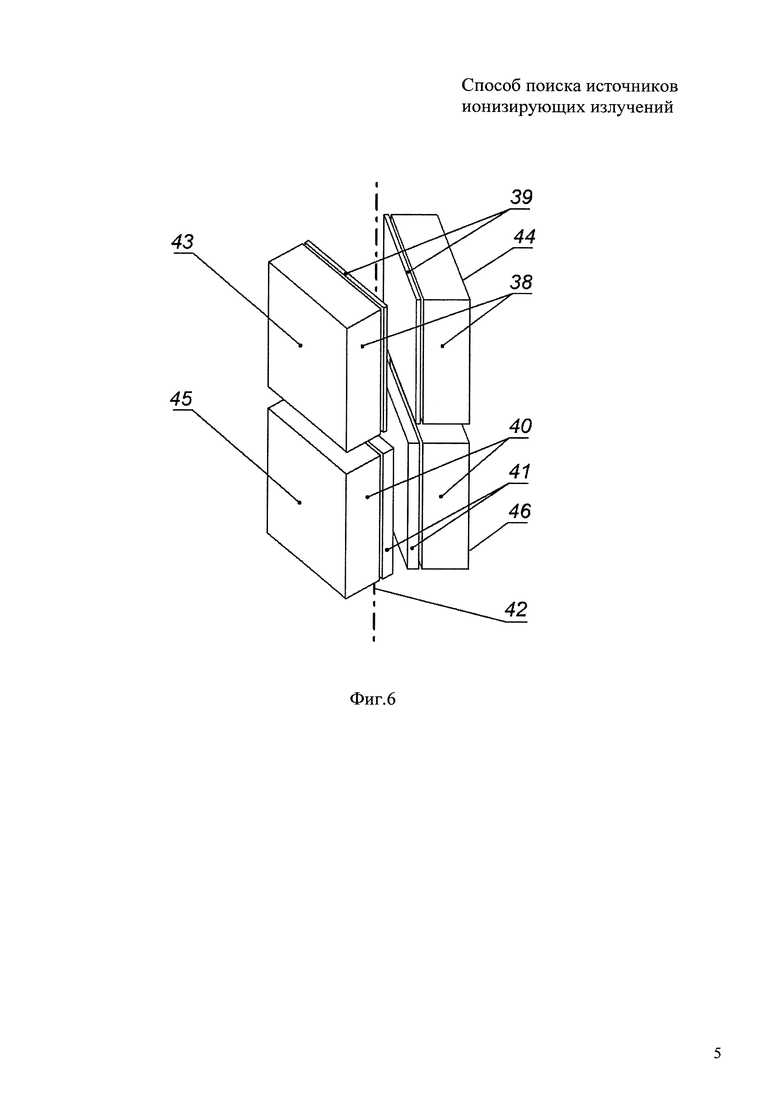
На фиг. 6 схематично показана гамма-нейтронная детектирующая система малогабаритного мобильного комплекса РК, состоящая из двух одинаковых пластиковых сцинтилляционных устройств детектирования гамма-излучения (УДγ) 38, имеющих свинцовые экраны 39 (торцовые экраны не показаны), и двух одинаковых пластиковых сцинтилляционных устройств детектирования нейтронного излучения (УДn) 40, имеющих экраны-поглотители нейтронов 41 (торцовые экраны не показаны). УДγ и УДn установлены на поворотной относительно вертикальной оси 42 платформе (на фиг. 6 не показана) таким образом, что входные окна 43 и 44 УДγ и, соответственно, - 45 и 46 УДn направлены в противоположные стороны и образуют острый двугранный угол.
Работа указанной детектирующей системы в составе комплекса РК аналогична работе комплекса РК по предыдущему примеру с одним существенным отличием: обнаружение и локализацию ИИИ осуществляют как по гамма-излучению, так и по нейтронному излучению.
Сигналы с правого и левого детекторов УДγ - соответственно nRγ и nLγ и сигналы с правого и левого детекторов УДn - соответственно nRn и nLn подают на вычислитель (на фиг. 6 не показан), где формируются разностные сигналы Δnγ и Δnn, вычисляемые как средние значения за фиксированные (свои для каждого канала) скользящие интервалы времени соответственно tbγ и tbn. Тогда порог обнаружения q0γ по гамма-каналу будет иметь по аналогии с (**) вид:

а порог q0n по нейтронному каналу:
Вычислитель комплекса (на фиг. 6 не показан) в каждый момент времени проверяет условие (***) обнаружения ИИИ по каждому каналу раздельно, и, в случае появления ИИИ, формирует один из сигналов: сигнал «ОБНАРУЖЕНИЕ γ» или «ОБНАРУЖЕНИЕ n» в зависимости от вида излучения. Локализация источника также будет осуществляться по этому же каналу. Если присутствуют оба вида излучения, то комплекс будет работать по зафиксированному наибольшему.
В остальном работа комплекса происходит аналогично работе комплекса по примеру 1.
Пример 3. Малогабаритный мобильный комплекс РК
Устанавливается на автомобили малой грузоподъемности.
Предназначен для радиационного мониторинга и картографирования территорий, а также для поиска (обнаружения, локализации и идентификации) источников гамма-излучения при работе по предлагаемому способу.
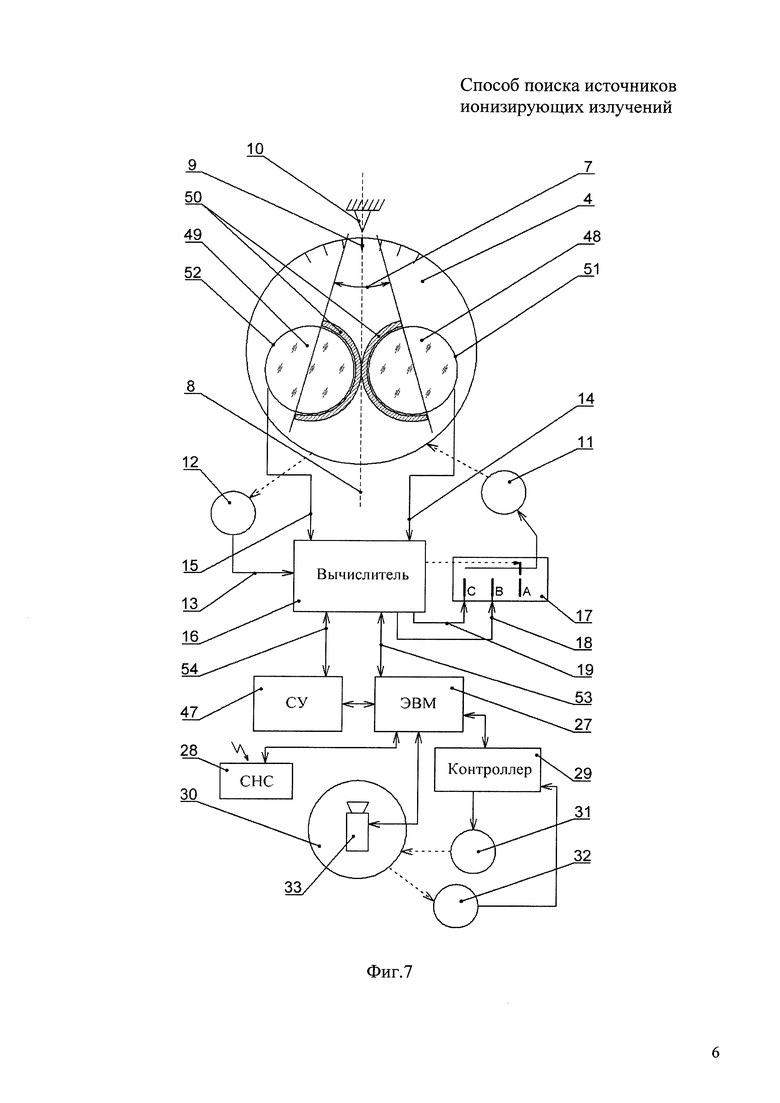
Структура комплекса приведена на фиг. 7. Она отличается от приведенной на фиг. 3 (пример 1) наличием спектрометрического усилителя (СУ) 47 и отсутствием на дополнительной платформе 30 спектрометрического УД 34 с усилителем. Детектирующая аппаратура комплекса состоит (фиг. 7, вид сверху) из двух одинаковых сцинтилляционных спектрометрических устройств детектирования (УДС) гамма-излучения - правого УДСR 48 и левого УДСL 49. Каждое из УДС представляет собой упакованный кристалл, например NaI(Tl), цилиндрической формы, оптически связанный с входным окном фотоэлектрического умножителя (ФЭУ) и имеющий свинцовый экран-коллиматор 50, выполненный в виде подковы с центральным углом 180°, источник высокого напряжения (ИВН) для питания ФЭУ и усилитель-формирователь (УФ), подключенный к выходу ФЭУ. УФ формирует сигналы средних скоростей счета импульсов от УДСR 48 nR(t) 14 и от УДСL 49 nL(t) 15. На фиг. 7 ФЭУ, ИВН и УФ не показаны.
Оба УД установлены на поворотной платформе 4 таким образом, что цилиндрические входные окна 51 и 52 направлены в противоположные стороны, и диаметры, проведенные через оси кристаллов и края коллиматоров, образуют острый двугранный угол 7 с биссекторной плоскостью 8, проходящей через нулевую риску 9 и ось вращения платформы 4, перпендикулярную плоскости чертежа. Платформа 4 может вращаться относительно оси посредством двигателя 11, при этом угол поворота платформы контролируется датчиком угла 12. Сигнал 13 об угле поворота платформы КУ от датчика 12, а также выходные сигналы nR(t) 14 и nL(t) 15 поступают на вычислитель 16. Вычислитель, используя и преобразуя эту информацию, управляет через переключатель 17 двигателем 11 и положением платформы 4 аналогично описанному выше в примере 1. Но отличие в том, что вычислитель 16 кроме основного канала связи 53 с ЭВМ 27 имеет второй (спектрометрический) канал связи 54, по которому транслируются сигналы nR(t) 14 и nL(t) 15 от вычислителя 16 в СУ 47 и далее, после обработки, - в ЭВМ 27.
Работа комплекса осуществляется аналогично работе комплекса по примеру 1. Отличия заключаются в том, что для идентификации в данном варианте не требуется дополнительного спектрометрического устройства детектирования, как в примере 1, а также в том, что появляется возможность идентификации гамма-источника при движении носителя от первой до второй точки остановки (отрезок времени t7…t8 на фиг. 2) одним из штатных УДС (УДСR или УДСL, в зависимости от того, по какому борту обнаружен источник).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА, ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2014 |
|
RU2562142C1 |
| Способ обнаружения и локализации подвижных источников ионизирующих излучений | 2018 |
|
RU2680671C1 |
| Способ локализации источников ионизирующих излучений мобильными комплексами радиационного контроля | 2020 |
|
RU2748937C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2003 |
|
RU2242024C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2022 |
|
RU2785525C1 |
| СПОСОБ ПОИСКА И ОБНАРУЖЕНИЯ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2011 |
|
RU2456638C1 |
| Способ поиска и обнаружения источников ионизирующих излучений с анализом времени регистрации частиц | 2025 |
|
RU2840106C1 |
| Роботизированный поиск источников ионизирующего излучения на местности | 2023 |
|
RU2836638C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИЗМЕРЕНИЯ СЛАБЫХ ПОТОКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2006 |
|
RU2293999C1 |
| УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ НАВИГАЦИИ РОБОТА В ПОЛЯХ ГАММА-ИЗЛУЧЕНИЯ | 2009 |
|
RU2390799C1 |
Изобретение относится к области радиационного контроля (РК) и предназначено для поиска (обнаружения и определения местоположения) источников ионизирующих излучений (ИИИ) наземными малогабаритными мобильными комплексами РК в случае радиационных аварий, утери или незаконного обращения с ИИИ и радиоактивными отходами, при проведении радиационного мониторинга территорий. Сущность изобретения заключается в том, что способ поиска источников ионизирующих излучений (ИИИ) содержит этапы, на которых поиск ИИИ осуществляют в два этапа: сначала решают задачу обнаружения ИИИ, а затем - задачу локализации обнаруженного ИИИ. При этом решение обеих задач осуществляют при помощи одной и той же детектирующей аппаратуры изменением ее структуры применительно для каждого этапа работы. Технический результат – повышение чувствительности и помехоустойчивости обнаружения и локализации ИИИ. 7 ил.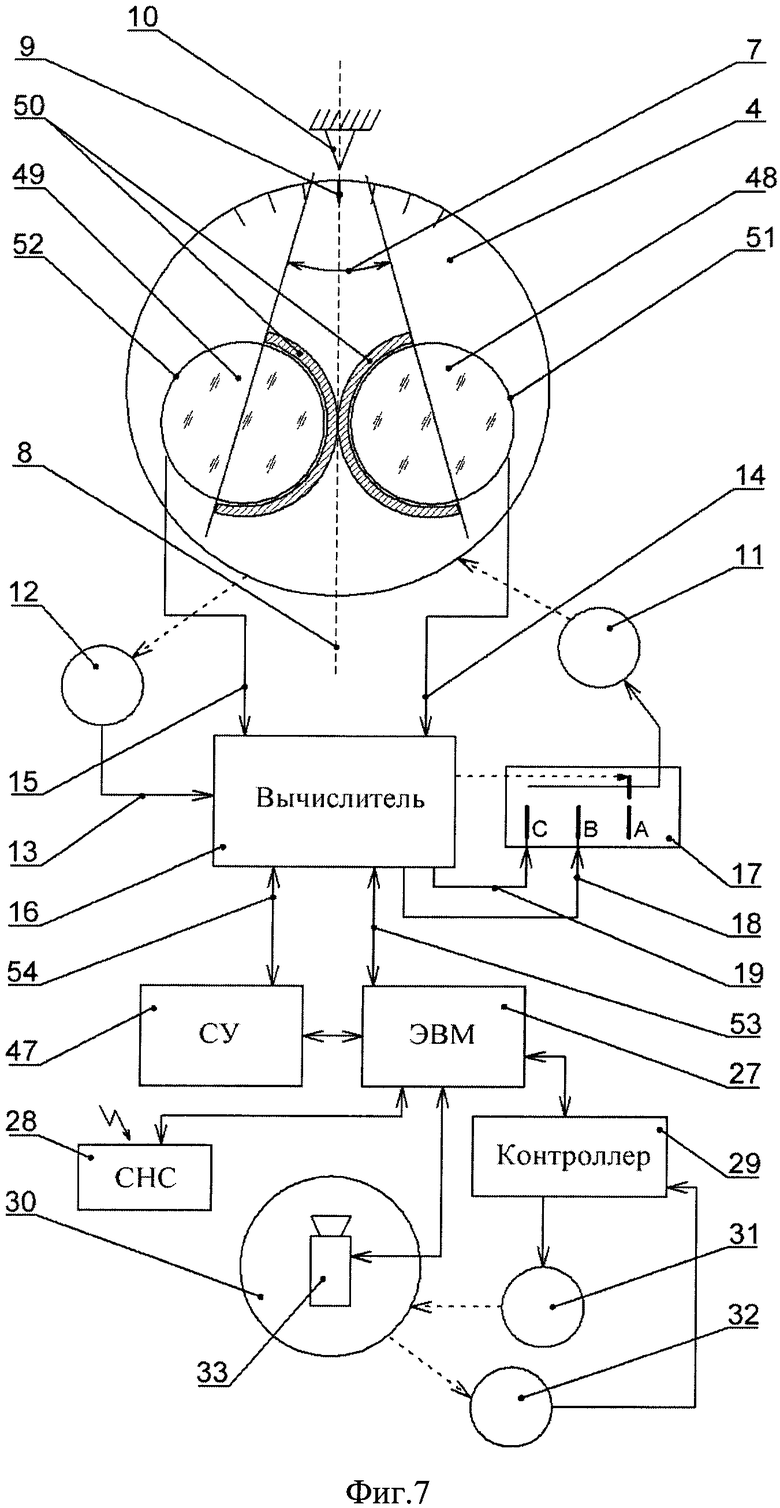
Способ поиска источников ионизирующих излучений (ИИИ), заключающийся в определении точки пересечения обнаруженных линий-направлений на искомый ИИИ из минимум двух различных мест остановки носителя комплекса радиационного контроля с использованием четного количества установленных на поворотной платформе, кинематически связанной с двигателем, одинаковых широкоугольных устройств детектирования (УД), разделенных экраном-поглотителем излучения, с направленными в противоположные стороны входными окнами, образующими острый двугранный угол, предназначенных для измерения каждым из них (правым УДR и левым УДL) средних скоростей счета соответственно nR(t) и nL(t) аддитивной суммы сигнала и радиационного фона, в вычислении разностного сигнала Δn(t)=nR(t)-nL(t), в достижении его минимума разворотом платформы и в определении по углу поворота платформы направления на обнаруженный ИИИ, отличающийся тем, что предварительно фиксируют платформу биссекторной плоскостью упомянутого двугранного угла параллельно продольной оси носителя, затем вычисляют в процессе движения сигнал Δn(t) и при выполнении условия |Δn(t)|>|q0|, где q0 - порог обнаружения ИИИ, принимают решение об обнаружении ИИИ, останавливают носитель, включают двигатель и после определения первой линии-направления на обнаруженный ИИИ вновь фиксируют платформу биссекторной плоскостью параллельно продольной оси носителя, продолжают движение и вычисление сигнала Δn(t), контролируя выполнение условия обнаружения |Δn(t)|>|q0| до второй остановки, выполняемой в момент достижения экстремума значения сигнала Δn(t), останавливают носитель и определяют вторую линию - направление на ИИИ по приведенной выше методике, а порог q0 обнаружения ИИИ вычисляют по формуле |q0|=|±m⋅σ(tb)|, где коэффициент m по умолчанию принимают равным 3, σ(tb) - среднеквадратическое отклонение сигнала Δn(tb) вычисляют при выполнении условия M(nR(tb))-M(nL(tb))≤ε⋅σ(tb), где tb - фиксированный скользящий интервал времени, достаточный для получения статистики требуемого качества, a ε - коэффициент, зависящий от идентичности параметров УДR и УДL, выбирают из диапазона от 0,01 до 0,05.
| СПОСОБ ПОИСКА, ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ ИСТОЧНИКОВ ИОНИЗИРУЮЩИХ ИЗЛУЧЕНИЙ | 2014 |
|
RU2562142C1 |
| Способ автоматического определения местоположения точечного источника гамма-излучения на местности | 2016 |
|
RU2620451C1 |
| US 5286973 A1, 15.02.1994 | |||
| WO 2002016965 A2, 28.02.2002. | |||

