Изобретение относится к оптико-механическому приборостроению, в частности к устройствам для перемещения лазерного луча в пространстве, устройствам оптического сканирования и слежения.
В настоящее время для передачи цифровой информации со скоростью выше 40 Гбит/с широко используются пространственные оптические (FSO - Free Space Optical) линии связи. К недостаткам этих линий стоит отнести малое расстояние между объектами связи в атмосфере - до 10 км, и невозможность использования FSO линий связи на мобильных объектах связи.
Малое расстояние обусловлено передачей оптического сигнала в атмосфере Земли вдоль линии горизонта, где восходящие тепловые потоки разрушают структуру лазерного пучка. В космическом пространстве подобных проблем нет, поэтому в космосе расстояние связи между объектами может превышать 100000 км.
Для того чтобы использовать оптические линии связи на мобильных объектах, необходимо на каждом объекте перед оптическим приемопередатчиком установить оптический сканер, который просматривает окружающее пространство вокруг объекта. Устройства сканирования окружающего пространства должны сводить оптические оси диаграммы направленности приемопередатчиков двух мобильных объектов на одну общую линию, навстречу друг другу, и поддерживать эту линию связи на протяжении всего сеанса связи. Точность взаимного наведения осей диаграммы направленности зависит от расстояния между объектами связи и может изменяться от 10' до 10''.
Известно устройство отклонения луча [патент РФ № 2369887], состоящее из сканирующего зеркала, установленного в центр крестовины, и четырех направляющих стержней, закрепленных по одному на каждой из четырех оконечностей крестовины, при этом каждый направляющий стержень соединен с крестовиной при помощи шарнира, имеющего четыре степени свободы. Направляющие стержни имеют на своей внешней поверхности винтовую нарезку, с помощью которой закреплены в неподвижных резьбовых втулках с аналогичной внутренней нарезкой и имеют возможность перемещаться возвратно-поступательно при вращении в ту или иную сторону.
Недостатками известного устройства отклонения луча являются малые углы отклонения луча, недостаточные для кругового обзора или сканирования всего окружающего пространства.
Для увеличения углов сканирования лазерного луча можно использовать сканирующее зеркало, как это сделано на космическом аппарате «Метеор М» в «Многозональном сканирующем устройстве малого разрешения» (МСУ-МР), которое предназначено для широкозахватной трассовой съемки облачного покрова и подстилающей поверхности (в том числе ледового покрова) [А.В. Горбунов, А.Л. Чуркин, Д.А. Павлов «Космический комплекс гидрометеорологического и океанографического обеспечения «Метеор-3М» с космическим аппаратом «Метеор-М». // «Труды ВНИИЭМ. Вопросы электромеханики», том 105, И: ОАО «Корпорация «ВНИИЭМ», 2008, с. 17-28]. Сканирующие зеркала позволяют сканировать окружающее пространство в достаточно больших углах (±54°), при этом конструкция приемопередатчика неподвижная (жестко привязана к корпусу космического аппарата), что повышает надежность устройства, так как нет изгибающихся кабелей и проводов.
Недостаток всех сканирующих устройств, работающих за счет наклона зеркала, - виньетирование оптического потока корпусом летательного аппарата, когда угол наклона зеркала меньше 45° к оптической оси приемопередатчика. Для предотвращения виньетирования необходимо значительно выносить сканирующее зеркало за габариты объекта, что не всегда удобно. Кроме этого, при больших углах сканирования размеры зеркала должны превосходить апертуру приемопередатчика в 2-2,5 раза, что не всегда удобно, в противном случае произойдет виньетирование оптического потока на малом зеркале. Потери на виньетирование оптических потоков могут превысить 40%.
В изобретении [патент РФ № 2650629] используется двухкоординатное поворотное устройство, предназначенное для разворота радиолокационной антенны в направлении цели, имеющее независимые внешний и внутренний узлы поворота, таким образом, чтобы нормаль к ее апертуре совпала с осью вращения внешнего узла двухкоординатного поворотного устройства, обеспечивающего ее вращение на азимутальный угол β, изменяющийся от 0 до 360°, и угол сканирования по месту α до значений 0°÷90°. В данном устройстве радиолокационную антенну можно заменить на приемопередающий объектив оптической линии связи, обеспечивающий оптическую связь между мобильными объектами. Виньетирование световых потоков отсутствует.
Данное устройство хорошо работает в условиях Земли, но в космическом пространстве, где температура корпуса устройства может изменяться в диапазоне от +70 до -100°С, возможны проблемы, вызванные тем, что вращая и наклоняя приемопередатчик, изменяются углы изгиба подводящих электрический сигнал проводов и оптоволоконных кабелей, что, в свою очередь, может привести к их повреждению. Для устранения этого недостатка можно использовать контактные ламели, но для передачи сигнала со скоростью более 10 Гбит/с контактные ламели не годятся.
При круговом сканировании окружающего пространства, для предотвращения изгиба проводов и оптоволокна, а также уменьшения виньетирования световых потоков, можно использовать вращающееся зеркало, которое наклонено под углом 45° к оптической оси приемопередатчика и вращается вокруг оптической оси объектива, как это сделано в изобретении [патент РФ № 2428728], взятом в качестве прототипа. Это оптико-электронная станция кругового обзора, которая содержит узел сканирующего (поворотного) зеркала, компенсатор разворота изображения, привод, объектив, матричное фотоприемное устройство (ФПУ) и электронный блок обработки сигналов.
Для кругового обзора в плоскости горизонта одного вращающегося зеркала достаточно, но для полного (сферического) обзора окружающего пространства, когда кроме кругового обзора необходимо сканирование окружающего пространства по углу места от 0 до 360°, этого недостаточно. Попытка сканирования луча по углу места за счет изменения наклона вращающегося зеркала приведет к с виньетированию световых потоков на корпусе и вращающемся зеркале летательного аппарата.
Технический результат направлен на создание оптической сканирующей системы полного обзора для мобильных оптических линий связи, в которой углы сканирования по азимутальному углу и углу места изменяются от 0 до 360°, при этом отсутствует виньетирование оптических пучков, и изменение изгибов проводов и кабелей, подходящих к приемопередатчику, не происходит.
Технический результат достигается использованием двух поворотных зеркал последовательно расположенных после приемопередающего устройства, первое из которых расположено под углом 45° к оптической оси приемопередатчика и может поворачиваться вокруг оптической оси приемопередатчика, а второе зеркало расположено под углом 45° к оптической оси первого зеркала и может поворачиваться вокруг оптической оси первого зеркала. Чтобы обеспечить условие, когда второе зеркало всегда расположено под углом 45° к оптической оси первого зеркала, необходимо, чтобы второе зеркало поворачивалось одновременно с первым зеркалом вокруг оптической оси приемопередатчика.
Сущность способа сканирования окружающего пространства для мобильной оптической линии связи и устройство для его осуществления поясняется фигурами 1-4.
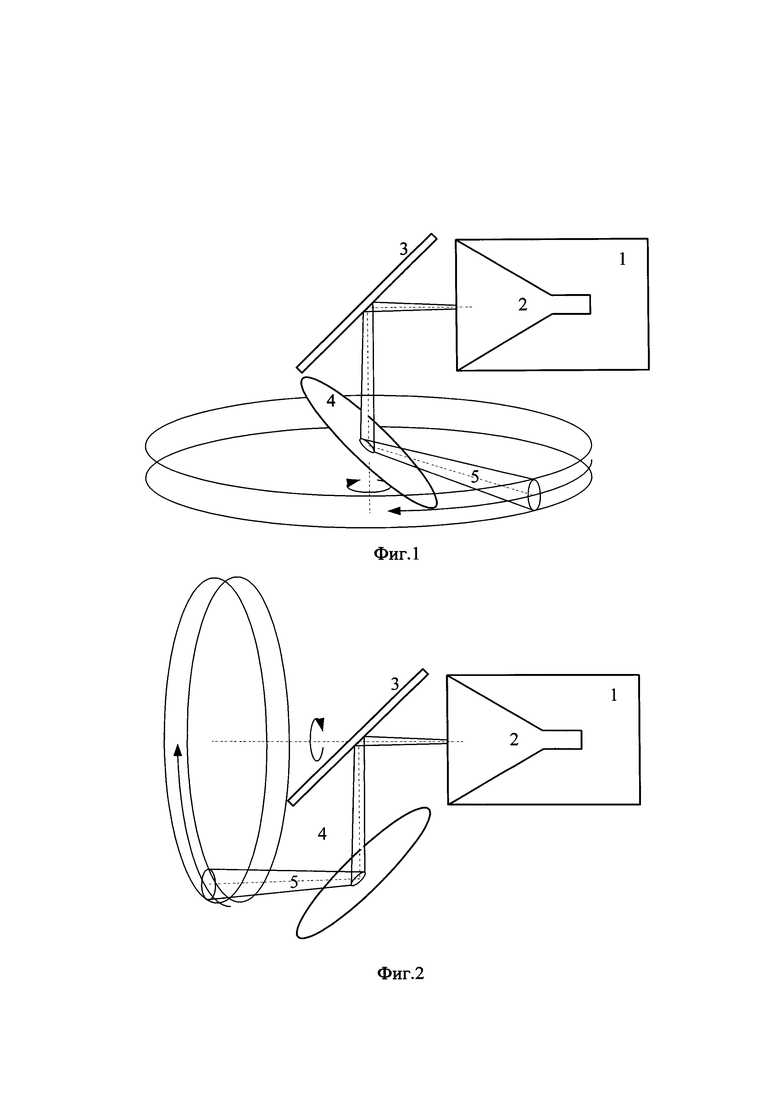
На фигуре 1 представлена работа способа сканирования окружающего пространства мобильным объектом с оптической линией связи при вращении второго зеркала.
На фигуре 2 представлена работа способа сканирования окружающего пространства мобильным объектом с оптической линией связи при вращении первого и второго зеркал вокруг оптической оси приемопередатчика.
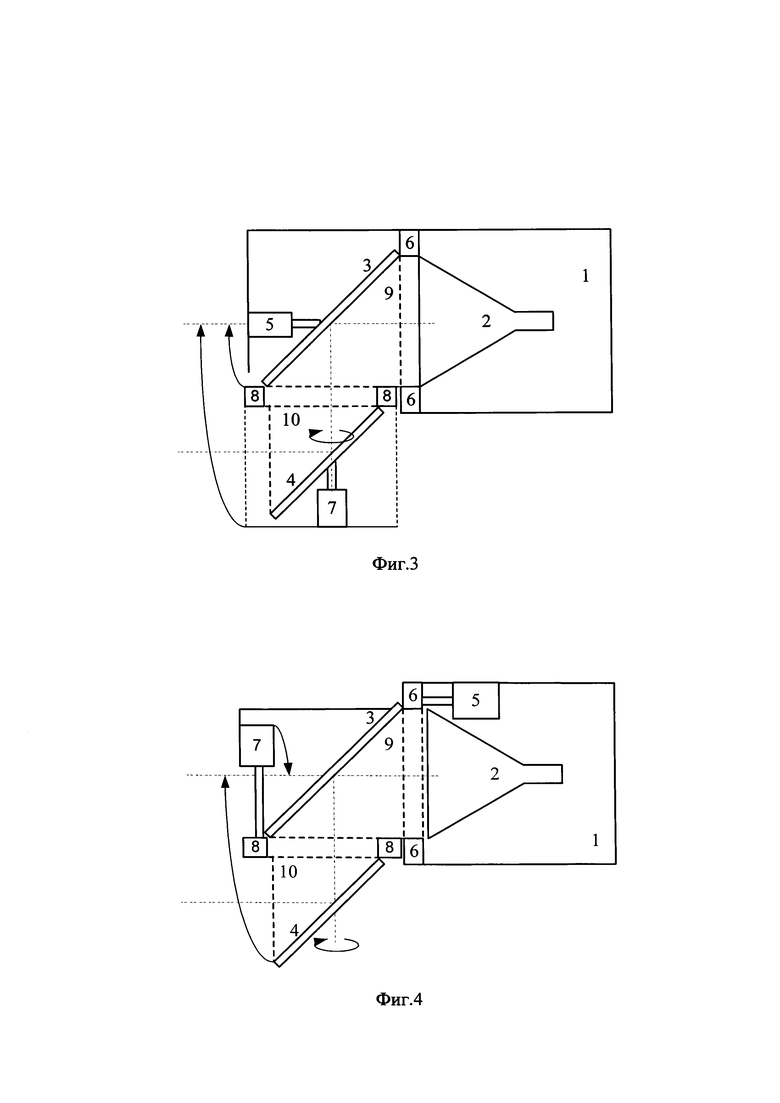
На фигуре 3 представлено расположение двигателей вращения зеркал сканирующей системы.
На фигуре 4 представлено устройство сканирования окружающего пространства для мобильной оптической линии связи.
В прототипе представлен способ кругового обзора, заключающийся в использовании оптического приемника, при этом круговое сканирование пространства осуществляется с помощью вращения плоского зеркала, установленного под углом 45° к оптической оси приемника, вокруг оси приемника. Такого построения недостаточно для полного обзора окружающего пространства, так как отсутствует управление по углу места.
Для сканирования пространства системой по углу места можно использовать следующие способы:
- осуществлять наклон всего устройства по углу места;
- осуществлять наклон вращающегося зеркала по углу места.
В первом случае возможно полное сканирование окружающего пространства, но при наклонах приемопередатчика относительно корпуса всего мобильного объекта происходит изменение радиусов изгиба подводящих проводов и оптоволоконных кабелей, что понижает надежность всей системы, особенно в жестких климатических условиях. Мобильным объектом с установленной на нем оптической линией связи может быть как высотный дрон, так и космический аппарат, поэтому температура корпуса летательного аппарата может изменяться от +70 до -100°С. Поэтому необходимо создавать конструкцию летательного аппарата таким образом, чтобы не происходило механического воздействия на провода и кабели, то есть приемопередающее устройство должно быть жестко связано с корпусом аппарата.
Во втором случае, если сканирующее зеркало расположено вплотную к приемопередающему устройству, возможно виньетирование световых пучков на корпусе аппарата.
Исходя из вышесказанного, авторами предлагается использовать первое плоское зеркало, установленное под углом 45° к оптической оси приемопередатчика, вокруг которой оно вращается, а для сканирования окружающего пространства в другой плоскости использовать второе плоское зеркало, которое всегда установлено под углом 45° к оптической оси, отраженной от первого плоского зеркала, и может вращаться вокруг этой оси. Чтобы обеспечить условие, когда второе зеркало всегда расположено под углом 45° к оптической оси первого зеркала, необходимо, чтобы второе зеркало поворачивалось одновременно с первым зеркалом вокруг оптической оси приемопередатчика. Представленная система сканирования окружающего пространства может производить сканирование лазерным пучком на азимутальный угол, изменяющийся от 0 до 360°, и угол сканирования по месту от 0 до 360°.
Исходя из вышесказанного, авторами предлагается способ сканирования окружающего пространства для мобильной оптической линии связи, заключающийся в использовании оптического приемопередатчика оптической связи, при этом круговое сканирование пространства осуществляется с помощью первого плоского зеркала, установленного под углом 45° к оптической оси приемопередатчика оптической связи, которое может вращаться вокруг оптической оси приемопередатчика оптической связи, а для сканирования пространства в другой плоскости используется второе плоское зеркало, установленное под углом 45° к оптической оси, отраженной от первого плоского зеркала, которое может вращаться вокруг оптической оси, отраженной от первого плоского зеркала, при этом, при этом, чтобы обеспечить условие, когда второе плоское зеркало всегда расположено под углом 45° к оптической оси, отраженной от первого плоского зеркала, необходимо, чтобы второе плоское зеркало поворачивалось одновременно с первым плоским зеркалом вокруг оптической оси приемопередатчика.
Представленная система сканирования окружающего пространства может производить сканирование оптическим пучком на азимутальный угол, изменяющийся от 0 до 360°, и угол сканирования по месту от 0 до 360°.
Способ сканирования окружающего пространства для мобильной FSO линии связи поясняется фигурами 1 и 2 и работает следующим образом, - если установить плоское зеркало 3 под углом 45° к оптической оси приемопередатчика 2, а плоское зеркало 4 установить под углом 45° к оптической оси, отраженной от плоского зеркала 3, то поворачивая плоское зеркало 4 вокруг оси, отраженной от плоского зеркала 3, происходит сканирование окружающего пространства оптическим пучком 5 по азимутальному углу от 0 до 360°, как это изображено на фигуре 1. Если одновременно развернуть плоское зеркало 3 и плоское зеркало 4 вокруг оптической оси приемопередатчика 2, как это изображено на фигуре 2, то условие установки зеркала 4 под углом 45° к оптической оси, отраженной от зеркала 3, не нарушается, при этом поворачивая второе зеркало 4 вокруг оптической оси, отраженной от зеркала 3, можно сканировать окружающее пространство оптическим пучком 5 по углу места от 0 до 360°. Разворачивая зеркала на различные углы можно осуществить сканирование всего окружающего пространства без «мертвых зон». При этом зеркала всегда расположены под углом 45° к оптическим осям, что говорит об отсутствии виньетирования оптических пучков и о 100% согласовании апертуры зеркал и входной апертуры приемопередатчика.
Для того, чтобы сканировать все окружающее пространство, достаточно осуществлять разворот плоского зеркала 3 вокруг оси приемопередатчика 2 на углы ±45° при вращении плоского зеркала 4 на углы ±180°.
Авторами предлагается устройство сканирования окружающего пространства для мобильной оптической линии связи, состоящее из корпуса, на котором закреплены приемопередатчик оптической связи, первый шаговый двигатель и первый подшипник, при этом первый шаговый двигатель может вращать полый вал первого подшипника, на котором под углом 45° к оси вала установлено первое плоское зеркало, второй шаговый двигатель и второй подшипник, установленный соосно оптической оси, отраженной от первого плоского зеркала, при этом второй шаговый двигатель может вращать полый вал второго подшипника, на котором под углом 45° к оси вала установлено второе плоское зеркало.
Устройство сканирования окружающего пространства для мобильной оптической линии связи работает следующим образом, - для вращения зеркал используются шаговые двигатели 5, 7 и подшипники 6, 8, как это изображено на фиг. 3. Первый шаговый двигатель 5 и первый подшипник 6 крепятся к корпусу 1 мобильного объекта, при этом к подшипнику 6 крепится полый вал 9. Плоское зеркало 3 устанавливается на полом валу 9 подшипника 6 под углом 45° к оси вала. Первый двигатель 5 вращает полый вал 9 на котором устанавливается подшипник 8 и шаговый двигатель 7, при этом подшипник 8 располагается соосно оптической оси, отраженной от плоского зеркала 3, а к подшипнику 8 крепится полый вал 10. На полом валу 10 подшипника 8 под углом 45° к оси вала 8 устанавливается плоское зеркало 4. Двигатель 6 вращает полый вал 10 подшипника 8.
Как видно из фиг. 3, такая компоновка работает не очень качественно, так как:
- при вращении плоского зеркала 4 вокруг оси сканирующий луч будет резаться на крепеже двигателя 7 к полому валу 9;
- при вращении плоского зеркала 3 вокруг оси сканирующий луч будет ограничиваться корпусом мобильного объекта;
- механический момент вращения плоского зеркала 4, двигателя 7, подшипника 8 и полого вала 10 очень велик, так как центр масс вращения смещен в их сторону.
Авторами, для устранения этих недостатков, предлагается другая компоновка устройства сканирования окружающего пространства для мобильной оптической линии связи, которая приведена на фигуре 4. В отличие от устройства, приведенного на фиг. 3, шаговый двигатель 5 при помощи зубчатой или червячной передачи осуществляет вращение полого вала 9, при этом он устанавливается так, чтобы выходная апертура приемопередатчика 2 была между зеркалом 3 и шаговым двигателем 5. Шаговый двигатель 7 при помощи зубчатой или червячной передачи осуществляет вращение полого вала 10, при этом он устанавливается так, чтобы ось вращения полого вала 9 была между шаговым двигателем 7 и подшипником 8. Установка шагового двигателя 7 за ось вращения полого вала 9 позволяет сместить центр масс плоского зеркала 4, двигателя 7, подшипника 8 и полого вала 10 к оси вращения полого вала 9 вплоть до полной центровки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПУТНИК-РЕТРАНСЛЯТОР ОПТИЧЕСКОЙ ЛИНИИ СВЯЗИ | 2020 |
|
RU2754642C1 |
| СПУТНИК МОНИТОРИНГА ЗЕМНОЙ ПОВЕРХНОСТИ С ОПТИЧЕСКОЙ СВЯЗЬЮ | 2020 |
|
RU2755031C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ОПТИЧЕСКОЙ СВЯЗЬЮ | 2020 |
|
RU2745036C1 |
| ШИРОКОУГОЛЬНЫЙ ВИРТУАЛЬНЫЙ ШЛЕМ С ВОЗМОЖНОСТЬЮ СОВМЕЩЕНИЯ РЕАЛЬНОГО И ВИРТУАЛЬНОГО ПРОСТРАНСТВА | 2005 |
|
RU2301436C2 |
| ПЛОСКАЯ АНТЕННА ПРИЕМА РАДИОСИГНАЛА L-ДИАПАЗОНА КРУГОВОЙ ПОЛЯРИЗАЦИИ | 2020 |
|
RU2757534C1 |
| УСТРОЙСТВО ДЛЯ НАВЕДЕНИЯ ЛАЗЕРНОГО ПУЧКА | 2022 |
|
RU2787968C1 |
| ВИРТУАЛЬНЫЙ ШЛЕМ | 2007 |
|
RU2359297C1 |
| СПОСОБ ЛАЗЕРНОГО СПЕКАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569279C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ С ВЫБОРОЧНЫМ СКАНИРОВАНИЕМ | 2020 |
|
RU2792951C2 |
| Лидарные системы и способы | 2020 |
|
RU2798363C2 |
Изобретение относится к оптико-механическому приборостроению, в частности к устройствам для перемещения лазерного луча в пространстве, устройствам оптического сканирования и слежения. Заявленное устройство сканирования окружающего пространства для мобильной оптической линии связи состоит из корпуса, на котором закреплены приемопередатчик оптической связи, первый шаговый двигатель и первый подшипник, при этом первый шаговый двигатель может вращать полый вал первого подшипника, на котором под углом 45° к оси вала расположено первое плоское зеркало. На полом валу первого подшипника дополнительно установлены второй шаговый двигатель и второй подшипник, расположенный соосно оптической оси, отраженной от первого плоского зеркала, при этом второй шаговый двигатель может вращать полый вал второго подшипника, на котором под углом 45° к оси вала установлено второе плоское зеркало. При этом первый шаговый двигатель устанавливается так, чтобы выходная апертура приемопередатчика оптической связи была между первым зеркалом и первым шаговым двигателем, а второй шаговый двигатель устанавливается так, чтобы ось вращения полого вала первого подшипника была между вторым шаговым двигателем и вторым подшипником. Технический результат - создание оптической сканирующей системы полного обзора для мобильных оптических линий связи, в которой углы сканирования по азимутальному углу и углу места изменяются от 0 до 360°, при этом отсутствует виньетирование оптических пучков и изменение изгибов проводов и кабелей, подходящих к приемопередатчику. 4 ил.
Устройство сканирования окружающего пространства для мобильной оптической линии связи, состоящее из корпуса, на котором закреплены приемопередатчик оптической связи, первый шаговый двигатель и первый подшипник, при этом первый шаговый двигатель может вращать полый вал первого подшипника, на котором под углом 45° к оси вала расположено первое плоское зеркало, при этом на полом валу первого подшипника дополнительно установлены второй шаговый двигатель и второй подшипник, расположенный соосно оптической оси, отраженной от первого плоского зеркала, при этом второй шаговый двигатель может вращать полый вал второго подшипника, на котором под углом 45° к оси вала установлено второе плоское зеркало, отличающееся тем, что первый шаговый двигатель устанавливается так, чтобы выходная апертура приемопередатчика оптической связи была между первым зеркалом и первым шаговым двигателем, а второй шаговый двигатель устанавливается так, чтобы ось вращения полого вала первого подшипника была между вторым шаговым двигателем и вторым подшипником.
| Система управления электроприводом транспортного средства | 2018 |
|
RU2690532C1 |
| US 2019064506 A1, 28.02.1019 | |||
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2541505C2 |
| WO 2019218046 A1, 21.11.2019. | |||

