Группа изобретений относится к области лазерной локации, лазерной связи, а также к системам доставки лазерного излучения на движущиеся воздушные объекты. Изобретение может быть использовано для очистки воздушного пространства от несанкционированных летающих объектов (крупные птицы, малоразмерные летательные беспилотные аппараты и др.), представляющих опасность для воздушных судов.
Защита от воздействия указанных объектов заключается в обнаружении и определении пространственных координат объектов и наведении на них силового излучения от источника излучения, находящегося на поверхности земли. При воздействии мощного лазерного излучения на объект происходит нагрев его поверхности и последующее разрушение. В достижении необходимого результата важную роль играет обеспечение доставки на объект лазерного излучения с высокой точностью и плотностью мощности.
Известен способ наведения и доставки лазерного излучения на движущийся объект, реализуемый при работе устройства по [Патент РФ №2120106, приоритет 17.08.1988 г., опубл. 10.10.1998], заключающийся в приеме излучения от объекта, подсвеченного солнечным излучением, формировании изображения объекта, определении координат энергетического центра изображения объекта и формировании рабочего лазерного излучения в направлении наиболее яркой точки объекта.
Способ реализует принцип использования реального излучения от объекта в качестве контрольного сигнала. Однако изображение объекта формируется по слабому сигналу отражения излучения от объекта, подсвеченного солнечным излучением, что приводит к низкой чувствительности способа. Сигналы от объекта принимаются в видимом диапазоне длин волн, спектрально отличном от длины волны лазерного излучения, направляемого на объект. Вследствие этого влияние рефракции, дисперсионных свойств и неоднородностей атмосферы на распространение излучения от объекта и лазерного излучения на объект различны, что приводит к неточности наведения и доставки лазерного излучения на объект.
Известно устройство наведения и доставки лазерного излучения на движущийся объект, описанное в [Патент РФ 2120106, приоритет 17.08.1988 г., опубл. 10.10.1998], включающее оптически сопряженные оптический квантовый усилитель с блоком запуска, светоделитель, формирующий объектив, фотоприемное устройство, блок управления фотоприемным устройством, блок управления и вычисления угловых координат энергетического центра изображения объекта, блок формирования управляющих сигналов, коммутатор, блок управления и вычисления. В процессе работы устройства излучение объекта, подсвеченного солнечным излучением, проходя через оптический тракт, содержащий оптический квантовый усилитель, активную среду задающего лазера, фокусируется формирующим объективом в его задней фокальной плоскости, изображение объекта формируется в плоскости фотоприемного устройства. Фотоприемное устройство реализовано на основе телевизионной передающей трубки. Выход фотоприемного устройства через блок управления фотоприемным устройством подключен к блоку вычисления и управления, который вычисляет координаты объекта по известным алгоритмам. После получения изображения объекта определяются координаты энергетического центра изображения объекта. Проведенное определение координат объекта в блоке вычисления и управления позволяет точнее привязаться к наиболее яркой точке объекта. Далее формируется импульс запуска лазерного излучения так, что оптическая ось пучка лазерного излучения направляется на наиболее яркую точку объекта. После усиления пучок лазерного излучения распространяется в заданном направлении.
К причинам, препятствующим достижению указанного ниже технического результата относятся следующие. Фотоприемное устройство формирует изображение объекта в видимом диапазоне по слабому сигналу отражения излучения от объекта, подсвеченного солнечным излучением, что приводит к низкой точности работы системы наведения. Также фотоприемное устройство и источник лазерного излучения работают на разных длинах волн. Влияние же рефракции, дисперсионных свойств, турбулентности атмосферы на распространение излучения от объекта и лазерного излучения на объект различно вследствие разности их длин волн. В результате возникают ошибки наведения, и устройство не обеспечивает высокой точности наведения и доставки лазерного излучения.
Наиболее близким способом того же назначения к заявленному изобретению-способу по совокупности признаков является способ доставки излучения на движущийся объект, изложенный в [Патент РФ 2270523, дата приоритета 14.07.2004., опубл. В бюл. «Изобретения. Полезные модели», №5, 2006], принятый за прототип. Способ включает формирование серии импульсов лазерного излучения с длиной волны λ на объект с образованием на нем теплового пятна с последующим приемом отраженного лазерного излучения на длине волны λ и излучения теплового пятна на длине волны теплового излучения λт, определение координат направления лазерного излучения по А, и координат центра теплового пятна на объекте по λт, при этом каждый последующий импульс лазерного излучения формируют, осуществляя корректировку его доставки по предыдущему импульсу по полученному рассогласованию координат по λ и λт.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известного способа, принятого за прототип, относятся следующие.
1. Влияние рефракции и дисперсионных свойств атмосферы на распространение лазерного излучения с длиной волны λ, отраженного от объекта, и излучения теплового пятна с длиной волны λт, различно, вследствие разности этих длин волн. В результате возникает неточность определения рассогласования координат направления лазерного излучения по λ и координат центра теплового пятна на объекте по λт и, соответственно, неточность доставки импульса лазерного излучения. Следствием этого будет то, что после каждого последующего воздействия лазерного импульса тепловое пятно будет возникать в другом месте, т.е. будет происходить дрейф по поверхности объекта теплового пятна.
2. В процессе распространения лазерного излучения, отраженного от объекта, в турбулентной атмосфере происходит расфокусировка пучка лазерного излучения, дрейф и кратковременные флуктуации угла прихода лазерного излучения на приемное устройство, что искажает определение координат направления лазерного излучения. Возникающие при этом ошибки отличаются от подобных ошибок, возникающих при распространении излучения теплового пятна, вследствие разности длин волн.
3. На определение координат направления лазерного излучения оказывают влияние ошибки, возникающие при приеме отраженного от объекта лазерного излучения, обусловленные спекл-структурой диффузно-отраженного лазерного излучения, к примеру, размытость изображения за счет спеклованности отраженного излучения. Вклад таких ошибок тем больше, чем меньше угловые размеры лазерного пятна.
4. Отраженное от объекта лазерное излучение принимается фотоприемной системой устройства, осуществляющего доставку лазерного излучения, с искажениями волнового фронта, обусловленными дефектами оптической системы устройства и оптическими неоднородностями атмосферы. Однако посылка лазерного излучения на объект при выполнении способа-прототипа осуществляется без коррекции волнового фронта исходящего лазерного излучения.
Изложенные недостатки способа-прототипа существенно снижают точность наведения излучения на движущийся объект и, соответственно, эффективность воздействия лазерного излучения на объект.
Наиболее близким устройством того же назначения к заявленному изобретению-устройству по совокупности признаков является устройство, реализующее способ доставки излучения на движущийся объект, изложенный в [Патент РФ №2110079, приоритет 25.09.1991 г., опубл. 27.04.1998]. Устройство принято за прототип.
Устройство содержит установленные на оптической оси устройства оптически сопряженные двухкоординатную оптическую систему наведения, снабженную датчиками положения и приводами вращения, светоделитель, реотражатель, объектив, фотоприемное устройство, связанное с блоком обработки изображения, источник импульсного лазерного излучения, связанный с блоком управления направлением пучка лазерного излучения. При этом объектив расположен по ходу отраженного от светоделителя приемного излучения, а реотражатель расположен по ходу отраженного от светоделителя лазерного излучения, исходящего от источника импульсного лазерного излучения. Здесь указаны признаки устройства-прототипа, совпадающие с признаками заявляемого устройства-изобретения. Помимо этих узлов устройство-прототип включает в себя источники зондирующего и вспомогательного лазерного излучений с блоками накачки, селектор угловых мод, состоящий из модулятора, светоделителя и второго объектива, третий объектив, квантовый усилитель с блоком управления, формирователь временных интервалов, затвор, блок обработки данных, коммутатор, вычитающее устройство. Источники зондирующего, вспомогательного и рабочего излучений связаны с селектором угловых мод. Сигналы, поступающие от блока обработки данных через коммутатор и вычитающее устройство, управляют модулятором, который формирует сигналы, необходимые для коррекции направления оси рабочего лазерного излучения.
В процессе работы устройства при поступлении данных внешнего целеуказания поворотное зеркало двухкоординатной оптической системы наведения ориентируется так, что линия визирования выставляется в точку ожидаемых координат объекта. Формируется импульс запуска источника зондирующего лазерного излучения, который, пройдя первый и второй светоделители, далее поворотное зеркало, достигает объекта и подсвечивает объект. Отраженное от объекта лазерное излучение через поворотное зеркало, второй светоделитель, открытый затвор, приемный объектив, квантовый усилитель поступает на фотоприемное устройство. Далее формируется второй импульс зондирующего лазерного излучения в момент времени с задержкой, определяемой временем замороженности атмосферы. Между отправками первого и второго импульсов зондирующего лазерного излучения формируется импульс вспомогательного лазерного излучения, который поступает на реотражатель и далее в приемный канал. В блоке обработки определяют координаты энергетического центра пучка вспомогательного лазерного излучения, характеризующие величину рассогласования визирных осей приемного и передающего каналов. В приемный канал поступает отраженный от объекта второй импульс зондирующего лазерного излучения, по формируемому изображению объекта определяют его угловые координаты в блоке обработки. С учетом координат энергетического центра пучка вспомогательного лазерного излучения корректируют направление оси рабочего лазерного излучения. После отработки управляющего воздействия рабочее лазерное излучение через второй светоделитель и поворотное зеркало направляется на объект.
К причинам, препятствующим достижению указанного ниже технического результата, относятся следующие. В процессе работы устройства осуществляется прием только отраженных от объекта лазерных импульсов. Реальное излучение объекта и отраженное зондирующее излучение лежат в разных спектральных диапазонах. Узлы устройства не обеспечивают прием реального излучения от объекта, не осуществляют контроля теплового воздействия лазерного излучения на облучаемый участок объекта, в результате снижается точность наведения лазерного излучения на объект.
Устройство громоздко и сложно, содержит три источника лазерного излучения с блоками накачки, селектор угловых мод, модулятор, объективы, светоделители, квантовый усилитель с блоком управления, формирователь временных интервалов (ФВИ), коммутатор, вычитающее устройство и т.д.
Сущность группы изобретений заключается в следующем.
Единой задачей, на решение которой направлена заявляемая группа изобретений, является повышение точности наведения и доставки лазерного излучения на движущийся объект, повышение эффективности воздействия излучения.
Технический результат, который может быть достигнут при осуществлении заявленного изобретения-способа, заключается в повышении точности наведения и доставки лазерного излучения на движущийся объект, повышении эффективности воздействия лазерного излучения.
Техническим результатом, который может быть достигнут при осуществлении заявленного изобретения-устройства, заключается в обеспечении повышения точности наведения и доставки лазерного излучения на движущийся объект и повышении эффективности воздействия лазерного излучения при упрощении и уменьшении весогабаритных характеристик устройства.
Указанный технический результат при осуществлении группы изобретений по объекту-способу достигается тем, что в известном способе доставки лазерного излучения на движущийся объект, включающем посылку импульсов лазерного излучения с длиной волны λ, на объект с формированием на нем теплового пятна, прием излучения теплового пятна, корректировку посылки импульсов лазерного излучения в направлении наиболее яркой точки теплового пятна, в соответствии с заявляемым техническим решением прием излучения теплового пятна осуществляют в спектральных интервалах ИК-диапазона, содержащих длину волны λ, ширину спектральных интервалов суживают в процессе приема излучения теплового пятна так, что спектральные границы интервалов сближаются с λ, а усредненное значение яркости изображения теплового пятна сохраняется примерно неизменным в процессе приема излучения, при этом лазерное излучение, отраженное от объекта, в процессе приема излучения теплового пятна селективно ослабляют, направление в наиболее яркую точку теплового пятна определяют по координатам точки максимальной яркости в изображении теплового пятна, которое получают после доставки на объект каждого импульса лазерного излучения.
Если перед посылкой импульса лазерного излучения в направлении наиболее яркой точки теплового пятна осуществляют адаптивную коррекцию волнового фронта импульса по распределению яркости в изображении теплового пятна, формируемого при доставке на объект предыдущего импульса лазерного излучения, то возникает усиление технического результата, заключающееся в повышении точности наведения и доставки излучения на движущийся объект.
Указанный технический результат при осуществлении группы изобретений по объекту-устройству достигается тем, что в устройстве, содержащем установленные на оптической оси устройства оптически сопряженные двухкоординатную оптическую систему наведения, снабженную датчиками положения и приводами вращения, светоделитель, реотражатель, объектив, фотоприемное устройство, связанное с блоком обработки изображения, источник импульсного лазерного излучения, связанный с блоком управления направлением пучка лазерного излучения, при этом объектив расположен по ходу отраженного от светоделителя приемного излучения, а реотражатель расположен по ходу отраженного от светоделителя лазерного излучения, исходящего от источника импульсного лазерного излучения, в соответствии с заявляемым техническим решением устройство дополнительно содержит телескоп, расположенный на оптической оси между двухкоординатной оптической системой наведения и светоделителем, оптически сопряженный с ними, последовательно расположенные на оптической оси между светоделителем и объективом оптически сопряженные селективный ослабитель интенсивности лазерного излучения и сменный светофильтр, также измеритель амплитуды сигнала, связанный с первым выходом блока обработки изображения, блок светофильтров, содержащий набор пропускающих светофильтров, и центральный блок управления, при этом источник лазерного излучения выполнен излучающим в ИК-диапазоне спектра, фотоприемное устройство выполнено в виде матричного фотоприемника, чувствительного в ИК-диапазоне спектра, включающем длину волны лазерного излучения, сменный светофильтр входит в набор пропускающих светофильтров, спектральная ширина полосы пропускания которых входит в диапазон спектральной чувствительности фотоприемного устройства, включает длину волны лазерного излучения и суживается от светофильтра к светофильтру, блок светофильтров связан с измерителем амплитуды сигнала и выполнен с возможностью замены сменного светофильтра из набора пропускающих светофильтров по командам от измерителя амплитуды сигнала, реотражатель выполнен в виде светоделительного куба, на разделительной грани которого нанесено светоделительное покрытие, на задней выходной и перпендикулярной ей боковой гранях светоделительного куба по ходу пропущенного и отраженного от светоделительного покрытия пучков лазерного излучения установлены призмы БР-180°, ребра которых, образованные катетными гранями, наклонены относительно оснований этих призм и взаимно перпендикулярны, реотражатель расположен так, что передняя входная грань светоделительного куба перпендикулярна оптической оси, блок обработки изображения выполнен с возможностью формирования кадра изображения с определением координат и яркостей точек изображения, телескоп снабжен приводом и выполнен с возможностью изменять фокусное расстояние по командам от центрального блока управления, второй и третий выходы блока обработки изображения связаны, соответственно, со входом блока управления направлением пучка лазерного излучения и входом центрального блока управления, центральный блок управления связан с приводами и датчиками двухкоординатной оптической системы наведения, приводом телескопа, также с источником лазерного излучения, выполнен с возможностью заданий режимов их работы и имеет входы и выходы для связи с внешними устройствами.
Если заявляемое устройство дополнительно содержит адаптивное зеркало и блок управления адаптивным зеркалом, при этом адаптивное зеркало расположено на оптической оси устройства между источником импульсного лазерного излучения и светоделителем и оптически сопряжено с ними, связано с блоком управления адаптивным зеркалом, вход которого связан с четвертым выходом блока обработки изображения, а блок управления адаптивным зеркалом выполнен с возможностью формирования команд управления адаптивным зеркалом по данным распределения яркости в изображении, поступающим от блока обработки изображения, то возникает дополнительный технический результат, заключающийся в том, что повышается точность наведения и доставки лазерного излучения на объект.
Если в заявляемом устройстве двухкоординатная оптическая система наведения включает в себя плоские зеркала азимутального и угломестного наведения, размещенные на горизонтальной платформе, при этом зеркало азимутального наведения неподвижно относительно горизонтальной платформы, плоскости зеркал азимутального и угломестного наведения параллельны друг другу и расположены под углом 45° к горизонтальной оси, горизонтальная платформа и зеркало угломестного наведения снабжены датчиками положения и приводами вращения и выполнены с возможностью вращения вокруг вертикальной и горизонтальной оси, соответственно, то это характеризует одну из частных форм реализации устройства с большим диаметром входного зрачка.
Совокупность вышеизложенных признаков изобретений связана причинно-следственной связью с техническими результатами изобретений.
По мере повышения температуры теплового пятна на объекте и суживания ширин спектральных интервалов в процессе приема излучения теплового пятна так, что спектральные границы интервалов сближаются с λ, происходит совмещение атмосферных трасс распространения лазерного излучения к объекту и излучения теплового пятна, вследствие чего происходит минимизация ошибок наведения лазерного излучения, обусловленных рефракцией, дисперсионными свойствами и турбулентностью атмосферы, в выбранную точку прицеливания. Это повышает точность наведения и доставки лазерного луча на объект.
Отсутствуют искажения, возникающие вследствие влияния рефракции на направление распространения излучения, турбулентности атмосферы на расплывание лазерного пучка, спекл-структуры диффузно-отраженного лазерного излучения и дефектов входной оптики на формируемое по отраженному лазерному излучению изображение объекта и определение его координат. Это также увеличивает точность наведения и доставки лазерного излучения на объект.
Осуществление адаптивной коррекции волнового фронта импульса лазерного излучения с учетом распределения яркости в текущем изображении теплового пятна, полученном в результате приема излучения теплового пятна, сформированного на объекте в результате доставки на объект предыдущего импульса лазерного излучения, позволяет компенсировать искажения лазерного пучка, обусловленные дефектами выходной оптики, формирующей лазерный пучок, а также оптическими неоднородностями в атмосферной трассе прохождения лазерного излучения, в результате повышается точность наведения и доставки лазерного излучения на объект.
В совокупности все узлы устройства при функционировании обеспечивают выполнение совокупности действий изобретения-способа. Работа устройства и реализация операций способа обеспечивают повышение точности наведения и доставки лазерного излучения в выбранную точку объекта и повышение эффективности воздействия лазерного излучения. Малые весогабаритные характеристики устройства достигаются за счет исключения ряда имевшихся узлов устройства и компактного совмещения оставшихся узлов с дополнительно вводимыми.
На Фиг.1 приведена структурная схема заявляемого устройства для доставки лазерного излучения на движущийся объект, в варианте его реализации, когда устройство содержит адаптивное зеркало и блок управления адаптивным зеркалом, а двухкоординатная оптическая система наведения включает в себя плоские зеркала азимутального и угломестного наведения, размещенные на горизонтальной платформе.
На Фиг.1 представлены: 1 - зеркало азимутального наведения, неподвижно размещенное на горизонтальной платформе, центр которого лежит на оси вращения платформы, 2 - горизонтальная платформа, 3 - привод вращения горизонтальной платформы 2 вокруг вертикальной оси, 4 - датчик углового положения горизонтальной платформы, 5 - подвижное зеркало угломестного наведения, размещенное на горизонтальной платформе, 6 - привод вращения зеркала угломестного наведения вокруг горизонтальной оси, 7 - датчик углового положения зеркала угломестного наведения, 8 - телескоп, 9 - привод фокусировки телескопа, 10 - светоделитель, 11 - реотражатель, 12 - селективный ослабитель интенсивности лазерного излучения, 13 - сменный светофильтр, 14 - набор пропускающих светофильтров, 15 - блок светофильтров, 16 - объектив, 17 - матричный фотоприемник, 18 - блок обработки изображения, 19 - измеритель амплитуды сигнала, 20 - адаптивное зеркало, 21 - блок управления адаптивным зеркалом, 22 - источник импульсного лазерного излучения, связанный с блоком управления направлением пучка лазерного излучения, 23 - блок управления направлением пучка лазерного излучения, 24 - центральный блок управления (ЦБУ), φ и θ - азимутальная и угломестная координаты, соответственно.
Спектральные чувствительности оптических компонентов устройства и матричного фотоприемника согласованы и лежат в одном спектральном диапазоне.
Приемный канал устройства включает в себя оптически сопряженные двухкоординатную оптическую систему наведения (1-7), телескоп 8, светоделитель 10, селективный ослабитель интенсивности лазерного излучения 12, сменный светофильтр 13, объектив 16 и матричный фотоприемник 17. Передающий канал устройства включает источник импульсного лазерного излучения 22, связанный с блоком управления направлением пучка лазерного излучения 23, адаптивное зеркало 20, светоделитель 10, телескоп 8 и двухкоординатную систему наведения 1-7. Канал, формирующий контрольные лазерные пучки, включает в себя помимо источника импульсного лазерного излучения 22, связанного с блоком управления направлением пучка лазерного излучения 23, также светоделитель 10, реотражатель 11, селективный ослабитель интенсивности лазерного излучения 12, сменный светофильтр 13, объектив 16 и матричный фотоприемник 17.
Заявляемое устройство, реализующее последовательность операций заявляемого способа доставки лазерного излучения, работает следующим образом.
Из системы внешнего целеуказания ВЦУ данные об азимутальной и угломестной координатах объекта и дальности до него поступают в ЦБУ 24. В результате управляющих воздействий на приводы двухкоординатной оптической системы наведения (1-7) зеркала азимутального и угломестного наведения ориентируются так, что оптическая ось устройства выставляется в точку нахождения объекта. Вращение зеркала азимутального наведения 1, осуществляемое благодаря вращению горизонтальной платформы 2 вокруг вертикальной оси, формируемое приводом 3 по командам от ЦБУ 24, обеспечивает сканирование устройством пространства по азимутальной координате ф. Вращение зеркала угломестного наведения 5 вокруг горизонтальной оси, формируемое приводом вращения зеркала угломестного наведения 6 по командам от ЦБУ 24, обеспечивает сканирование устройством пространства по угломестной координате 9. Также по командам от ЦБУ 24 осуществляется формируемая приводом 9 фокусировка телескопа 8 на дальность до объекта.
При обнаружении объекта тепловое излучение от него, отразившись от зеркал угломестного и азимутального наведения, поступает на оптический вход телескопа 8 через отверстие, выполненное в центре горизонтальной платформы 2. Далее тепловое излучение отражается от светоделителя 10, проходит селективный ослабитель 12, сменный светофильтр 13, объектив 16 и поступает на матричный фотоприемник 17, формирующий тепловое изображение объекта. Начальная спектральная ширина полосы пропускания сменного светофильтра совпадает с диапазоном спектральной чувствительности матричного фотоприемника 17. Светоделитель 10 может быть выполнен в виде плоскопараллельной пластинки из оптического материала, прозрачного на длине волны лазерного излучения, на поверхности пластинки по ходу исходящего от источника импульсного лазерного излучения нанесено покрытие, отражающее небольшую часть лазерного излучения к реотражателю, а на обратной поверхности пластинки по ходу приемного излучения от объекта нанесено покрытие, отражающее излучение в диапазоне чувствительности матричного фотоприемника 17.
На тепловом изображении объекта выбирается (назначается) точка прицеливания, находящаяся в окрестности центра матричного фотоприемника. После этого блок обработки изображений 18 формирует сигналы рассогласования назначенной точки прицеливания с оптической осью устройства, передаваемые в ЦБУ 24. Далее по командам от ЦБУ 24 на этом этапе рабочего алгоритма рассогласование отрабатывается двухкоординатной оптической системой наведения (1-7). Здесь и далее под отработкой рассогласований подразумевается осуществление действий, направленных на минимизацию рассогласований. При совмещении выбранной точки с направлением оптической оси устройства по командам от ЦБУ 24 включается источник лазерного излучения 22. Импульс лазерного излучения попадает на объект и формирует тепловое пятно на его поверхности. Излучение теплового пятна далее регистрируется матричным фотоприемником 17.
На пути лазерного излучения от источника к объекту при прохождении пучка лазерного излучения через светоделитель 10 небольшая часть лазерного пучка ответвляется в ретроотражатель 11, оптически сопряженный со светоделителем 10. Реотражатель 11 выполнен в виде светоделительного куба, на разделительной грани которого нанесено светоделительное покрытие. Входящий пучок лазерного излучения падает на переднюю входную грань светоделительного куба, проходит светоделительное покрытие и разделяется на два пучка, пропущенный и отраженный. На задней выходной и перпендикулярной ей боковой гранях светоделительного куба по ходу пропущенного и отраженного от светоделительного покрытия пучков излучения установлены призмы БР-180°, выполненные так, что ребра призм, образованные катетными гранями, наклонены относительно оснований этих призм и взаимно перпендикулярны. Призмы соединены с соответствующими гранями светоделительного куба с помощью оптического клея. Пропущенный пучок проходит далее через заднюю выходную грань светоделительного куба, а отраженный пучок проходит в боковую грань, перпендикулярную задней грани. Далее оба пучка входят в призмы БР-180° через их основания и, отразившись от катетных граней, возвращаются в обратном направлении. Пройдя через светоделитель 10, селективный ослабитель интенсивности лазерного излучения 12, сменный светофильтр 13, объектив 16, они попадают на матричный фотоприемник 17. Так как ребрам призм придан некоторый наклон относительно их оснований, то два отраженных от реотражателя пучка лазерного излучения (контрольные лазерные пучки) возвращаются в обратном направлении с угловым смещением от первоначального направления. В результате, при регистрации теплового пятна на матричном фотоприемнике 17 помимо изображения теплового пятна экспонируются две отметки, раздельно показывающие координаты положения оси лазерного пучка в системе α-, β-координат матричного фотоприемника, положение одной из отметок соответствует положению оси лазерного пучка по α-координате, положение другой отметки - по β-координате.
Углы наклона ребер, образованных катетными гранями призм БР-180° относительно оснований этих призм, выбираются так, чтобы угловое смещение пучков находилось в пределах небольшой части угла поля зрения матричного фотоприемника 17, к примеру в пределах 1/4 угла поля зрения.
В изображении теплового пятна выбирается точка максимальной яркости и определяются ее координаты в системе α-, β-координат матричного фотоприемника. По координатам точки максимальной яркости в блоке обработки изображений 18 формируются сигналы рассогласования «О» положения точки максимальной яркости относительно оптической оси устройства и передаются в ЦБУ 24. С учетом координат экспонированных отметок контрольных лазерных пучков, полученных от ретроотражателя, формируются сигналы рассогласования «Л» положения точки максимальной яркости относительно положения оси лазерного пучка, которые также передаются в ЦБУ 24.
Для отработки рассогласований «О» в ЦБУ 24 формируются команды управления приводами 3 и 6 двухкоординатной оптической системы наведения (1-7) и направляются к этим приводам. Также в ЦБУ 24 формируются и направляются команды по рассогласованиям «Л» к блоку управления направлением пучка лазерного излучения 23, связанному с источником лазерного излучения 22. После отработки рассогласований в наиболее яркую точку теплового пятна направляется следующий импульс лазерного излучения.
В конкретном варианте исполнения устройства доставки лазерного излучения изменение направления пучка лазерного излучения осуществлялось с помощью двухкоординатного электроуправляемого пространственно-временного модулятора света (ПВМС), установленного внутри лазерного резонатора.
При начальной регистрации теплового пятна измеритель амплитуды сигнала 19 устанавливает уровень сигнала, соответствующий усредненному по площади пятна значению яркости теплового пятна. По мере воздействия посылаемых импульсов лазерного излучения на объект происходит нагрев его поверхности и увеличение яркости теплового пятна. Посылку импульсов лазерного излучения осуществляют с корректировкой направления в наиболее яркую точку теплового пятна. Направление в наиболее яркую точку теплового пятна определяют по координатам точки максимальной яркости в текущем изображении теплового пятна, которое получают после доставки на объект каждого импульса лазерного излучения.
Увеличение яркости теплового пятна отслеживается измерителем амплитуды сигнала 19 по изменению величины установленного уровня сигнала. В случае превышения этой величины по командам измерителя амплитуды сигнала 19 осуществляется смена светофильтра в блоке светофильтров 15, суживающего спектральный интервал приема излучения теплового пятна так, что усредненное значение яркости излучения теплового пятна сохраняется примерно неизменным в процессе приема излучения. Набор сменных пропускающих светофильтров 14 входит в состав блока светофильтров 15. Отраженное от объекта лазерное излучение при попадании в матричный фотоприемник не оказывает ощутимого воздействия, так как ослабляется селективным ослабителем интенсивности лазерного излучения 12. При выборе коэффициента ослабления интенсивности лазерного излучения ослабителя 12 учитывается мощность источника лазерного излучения, а также коэффициенты деления световых потоков светоделителем. Коэффициент ослабления селективного ослабителя подбирается так, чтобы контрольные лазерные пучки, исходящие от реотражателя, могли быть зарегистрированы матричным фотоприемником 17, и в то же время лазерное излучение, отраженное от диффузного объекта, было ослаблено.
Таким образом, прием излучения теплового пятна по мере повышения его температуры на объекте осуществляется с коррекцией полосы пропускания излучения теплового пятна сменным светофильтром. В результате спектральный интервал приема излучения теплового пятна сближается с лазерной длиной волны, излучение теплового пятна и лазерное излучение при их распространении претерпевают одно и то же влияние рефракции, дисперсионных и турбулентных свойств атмосферы, более точно совмещаются оптические трассы распространения этих излучений. Повышается точность доставки импульса лазерного излучения в точку максимальной яркости теплового пятна. Вследствие отсутствия операции приема отраженного от объекта лазерного излучения исключены ошибки, возникающие при определении координат объекта, обусловленные спекл-структурой диффузно-отраженного лазерного излучения и искажениями лазерного пучка на трассе объект - приемник излучения.
Блок управления адаптивным зеркалом 21 анализирует данные, полученные от блока обработки изображений 18 по распределению энергии в тепловом пятне, и по искривлению равнояркостных линий изображения теплового пятна формирует команды управления адаптивным зеркалом 20 с целью компенсации искажений, вносимых в тракт распространения лазерного излучения элементами выходной оптики и оптическими неоднородностями атмосферы. Подходы к реализации подобных задач известны [Д.П. Лукьянов, А.А. Корниенко, Б.Е. Рудницкий, «Оптические адаптивные системы», М., Радио и связь, 1989, 239 с.]. Посылка лазерного излучения на объект по сравнению со способом-прототипом осуществляется с коррекцией волнового фронта исходящего лазерного излучения. В результате учитываются искажения волнового фронта, обусловленные дефектами оптической системы устройства и оптическими неоднородностями атмосферы, и точность доставки повышается.
Устройство, реализующее способ, вследствие отсутствия ряда оптико-электронных и механических узлов, имеющихся в устройстве-прототипе, упрощено и характеризуется меньшими весогабаритными характеристиками.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270523C1 |
| Адаптивная система апертурного зондирования компенсации искажений волнового фронта в лазерных системах | 2022 |
|
RU2791833C1 |
| Адаптивная система апертурного зондирования компенсации искажений волнового фронта в лазерных системах | 2024 |
|
RU2823912C1 |
| УСТРОЙСТВО ДЛЯ ФОКУСИРОВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 2005 |
|
RU2301496C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО КОНТРОЛЯ ОКОЛОЗЕМНОГО КОСМИЧЕСКОГО ПРОСТРАНСТВА | 2012 |
|
RU2502647C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР (ВАРИАНТЫ) | 2002 |
|
RU2273824C2 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191406C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ ПРИЦЕЛОВ НА СТРЕЛКОВОМ ОРУЖИИ | 2013 |
|
RU2536570C1 |
Группа изобретений относится к области лазерной локации, лазерной связи, а также к системам доставки лазерного излучения на движущийся объект. Технический результат состоит в повышении точности наведения и доставки лазерного излучения на движущийся объект. Для этого на движущийся объект посылают импульсы лазерного излучения с длиной волны λ на объект с формированием на нем теплового пятна, принимают излучение теплового пятна в спектральных интервалах ИК-диапазона, содержащих длину волны λ, ширину спектральных интервалов суживают в процессе приема излучения теплового пятна так, что спектральные границы интервалов сближаются с λ, а усредненное значение яркости изображения теплового пятна сохраняется примерно неизменным в процессе приема излучения, при этом лазерное излучение, отраженное от объекта, в процессе приема излучения теплового пятна селективно ослабляют, корректируют посылку импульсов лазерного излучения в направлении наиболее яркой точки теплового пятна, направление определяют по координатам точки максимальной яркости в изображении теплового пятна, которое получают после доставки на объект каждого импульса лазерного излучения. Устройство, реализующее способ, включает в себя источник лазерного излучения, связанный с блоком управления направлением пучка лазерного излучения, оптически сопряженные двухкоординатную оптическую систему наведения, телескоп, светоделитель, реотражатель, селективный ослабитель интенсивности лазерного излучения, сменный светофильтр из набора пропускающих светофильтров, входящего в блок светофильтров, объектив, матричный фотоприемник, чувствительный в ИК-диапазоне спектра, включающем длину волны лазерного излучения, связанный с блоком обработки изображения, связанным, в свою очередь, с измерителем амплитуды сигнала и центральным блоком управления, при этом блок светофильтров связан с измерителем амплитуды сигнала и выполнен с возможностью замены сменного светофильтра из набора светофильтров по командам от измерителя амплитуды сигнала, центральный блок управления связан с приводами и датчиками двухкоординатной оптической системы наведения, приводом телескопа, также с источником лазерного излучения, выполнен с возможностью заданий режимов их работы и имеет входы и выходы для связи с внешними устройствами. 2 н. и 3 з.п. ф-лы, 1 ил.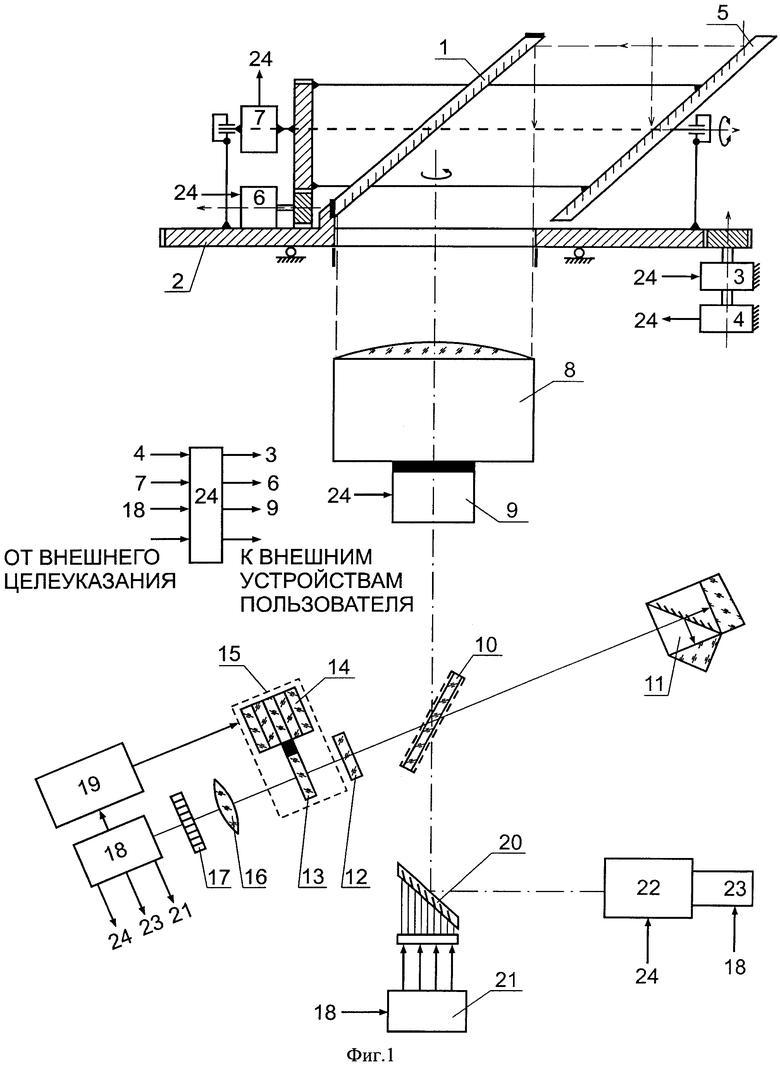
1. Способ доставки лазерного излучения на движущийся объект, включающий посылку импульсов лазерного излучения с длиной волны λ на объект с формированием на нем теплового пятна, прием излучения теплового пятна, корректировку посылки импульсов лазерного излучения в направлении наиболее яркой точки теплового пятна, отличающийся тем, что прием излучения теплового пятна осуществляют в спектральных интервалах ИК-диапазона, содержащих длину волны λ, ширину спектральных интервалов суживают в процессе приема излучения теплового пятна так, что спектральные границы интервалов сближаются с λ, а усредненное значение яркости изображения теплового пятна сохраняется примерно неизменным в процессе приема излучения, при этом лазерное излучение, отраженное от объекта, в процессе приема излучения теплового пятна селективно ослабляют, направление в наиболее яркую точку теплового пятна определяют по координатам точки максимальной яркости в изображении теплового пятна, которое получают после доставки на объект каждого импульса лазерного излучения.
2. Способ по п. 1, отличающийся тем, что перед посылкой импульса лазерного излучения в направлении наиболее яркой точки теплового пятна осуществляют адаптивную коррекцию волнового фронта импульса по распределению яркости в изображении теплового пятна, формируемого при доставке на объект предыдущего импульса лазерного излучения.
3. Устройство для доставки лазерного излучения на движущийся объект, содержащее установленные на оптической оси устройства оптически сопряженные двухкоординатную оптическую систему наведения, снабженную датчиками положения и приводами вращения, светоделитель, реотражатель, объектив, фотоприемное устройство, связанное с блоком обработки изображения, источник импульсного лазерного излучения, связанный с блоком управления направлением пучка лазерного излучения, при этом объектив расположен по ходу отраженного от светоделителя приемного излучения, а реотражатель расположен по ходу отраженного от светоделителя лазерного излучения, исходящего от источника импульсного лазерного излучения, отличающееся тем, что устройство дополнительно содержит телескоп, расположенный на оптической оси между двухкоординатной оптической системой наведения и светоделителем, оптически сопряженный с ними, последовательно расположенные на оптической оси между светоделителем и объективом оптически сопряженные селективный ослабитель интенсивности лазерного излучения и сменный светофильтр, также измеритель амплитуды сигнала, связанный с первым выходом блока обработки изображения, блок светофильтров, содержащий набор пропускающих светофильтров, и центральный блок управления, при этом источник лазерного излучения выполнен излучающим в ИК-диапазоне спектра, фотоприемное устройство выполнено в виде матричного фотоприемника, чувствительного в ИК-диапазоне спектра, включающем длину волны лазерного излучения, сменный светофильтр входит в набор пропускающих светофильтров, спектральная ширина полосы пропускания которых входит в диапазон спектральной чувствительности фотоприемного устройства, включает длину волны лазерного излучения и суживается от светофильтра к светофильтру, блок светофильтров связан с измерителем амплитуды сигнала и выполнен с возможностью замены сменного светофильтра из набора пропускающих светофильтров по командам от измерителя амплитуды сигнала, реотражатель выполнен в виде светоделительного куба, на разделительной грани которого нанесено светоделительное покрытие, на задней выходной и перпендикулярной ей боковой гранях светоделительного куба по ходу пропущенного и отраженного от светоделительного покрытия пучков лазерного излучения установлены призмы БР-180°, ребра которых, образованные катетными гранями, наклонены относительно оснований этих призм и взаимно перпендикулярны, реотражатель расположен так, что передняя входная грань светоделительного куба перпендикулярна оптической оси, блок обработки изображения выполнен с возможностью формирования кадра изображения с определением координат и яркостей точек изображения, телескоп снабжен приводом и выполнен с возможностью изменять фокусное расстояние по командам от центрального блока управления, второй и третий выходы блока обработки изображения связаны, соответственно, со входом блока управления направлением пучка лазерного излучения и входом центрального блока управления, центральный блок управления связан с приводами и датчиками двухкоординатной оптической системы наведения, приводом телескопа, также с источником лазерного излучения, выполнен с возможностью заданий режимов их работы и имеет входы и выходы для связи с внешними устройствами.
4. Устройство по п. 3, отличающееся тем, что дополнительно содержит адаптивное зеркало и блок управления адаптивным зеркалом, при этом адаптивное зеркало расположено на оптической оси устройства между источником импульсного лазерного излучения и светоделителем и оптически сопряжено с ними, связано с блоком управления адаптивным зеркалом, вход которого связан с четвертым выходом блока обработки изображения, а блок управления адаптивным зеркалом выполнен с возможностью формирования команд управления адаптивным зеркалом по данным распределения яркости в изображении, поступающим от блока обработки изображения.
5. Устройство по любому из пп. 3, 4, отличающееся тем, что двухкоординатная оптическая система наведения включает в себя плоские зеркала азимутального и угломестного наведения, размещенные на горизонтальной платформе, при этом зеркало азимутального наведения неподвижно относительно горизонтальной платформы, плоскости зеркал азимутального и угломестного наведения параллельны друг другу и расположены под углом 45° к горизонтальной оси, горизонтальная платформа и зеркало угломестного наведения снабжены датчиками положения и приводами вращения и выполнены с возможностью вращения вокруг вертикальной и горизонтальной оси, соответственно.
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1991 |
|
RU2110079C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА И ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2251712C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2224267C2 |

