Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству или способу согласно ограничительной части независимых пунктов формулы изобретения. Кроме того, настоящее изобретение может быть на машиночитаемом носителе, содержащем соответствующую компьютерную программу.
Уровень техники
Опрокидывание транспортного средства может быть обнаружено, после чего может быть, например, автоматически выполнен вызов экстренных оперативных служб. Существует несколько различных видов такого опрокидывания.
Раскрытие изобретения
В соответствии с вышеизложенным, в настоящем изобретении поставлена задача разработки способа, управляющего устройства (блока управления), в котором применяется этот способ, и соответствующей компьютерной программы, представленных в независимых пунктах формулы изобретения. Варианты осуществления изобретения, приведенные в зависимых пунктах формулы изобретения, предоставляют возможность внесения изменений и усовершенствований в устройство, описанное в независимом пункте формулы изобретения.
Изобретение в представленных примерах осуществления позволяет распознавать опрокидывание транспортного средства, используя сравнение сигнала ускорения, получаемого от датчика ускорения с устойчивостью к смещению, с сигналом ускорения, получаемого от датчика ускорения с коррекцией нулевой точки. Например, первый сигнал ускорения, поступающий из управляющего устройства электронной системы динамической стабилизации транспортного средства - ESP (от англ. Electronic Stability Program), можно сравнить со вторым сигналом ускорения, поступающего из управляющего устройства воздушной подушки безопасности, чтобы в зависимости от этого установить по меньшей мере одно пороговое значение для датчика ускорения управляющего устройства воздушной подушки безопасности с целью распознания опрокидывания транспортного средства, в частности при медленном вращении.
Настоящее изобретение в различных вариантах его осуществления позволяет реализовать устойчивое (робастное) и надежное распознавание опрокидывания, в частности медленного опрокидывания, транспортного средства. С его помощью можно уверенно распознать - например с использованием существующих систем, или архитектур, например содержащих датчики с устойчивостью к смещению и датчики с коррекцией смещения, - опрокидывание, в частности медленное вращение, которое может длиться несколько минут. Это дает, например, возможность исключить использование датчиков с устойчивостью к смещению и в системах, обеспечивающих работу воздушных подушек безопасности, с целью распознавания расчетных случаев нагрузки, относящихся к категории редких. Тем самым можно, например, также снизить, применительно к управляемым системам помощи водителю, вероятность ложноположительного срабатывания устройства вызова экстренных оперативных служб и, следовательно, повысить робастность распознавания.
Предлагается способ распознавания опрокидывания транспортного средства, оснащенного первым датчиком ускорения, обладающим устойчивостью к смещению, и вторым датчиком ускорения, с коррекцией нулевой точки, включающий следующие шаги:
- считывание первого сигнала датчика, второго сигнала датчика и третьего сигнала датчика, причем первый сигнал датчика представляет собой зарегистрированные первым датчиком ускорения значения ускорения относительно первой оси координат транспортного средства, второй сигнал датчика представляет собой зарегистрированные вторым датчиком ускорения значения ускорения относительно первой оси координат транспортного средства, а третий сигнал датчика представляет собой зарегистрированные вторым датчиком ускорения значения ускорения относительно второй оси координат транспортного средства, перпендикулярной первой оси координат,
- установку порогового значения сигнала в зависимости от величины разности между первым сигналом датчика и вторым сигналом датчика,
- выполнение сравнения третьего сигнала датчика с установленным пороговым значением сигнала,
- генерирование, в зависимости от результата сравнения, сигнала опрокидывания, отображающего наличие опрокидывания.
Данный способ может быть, например, реализован программными или аппаратными средствами либо в смешанной программно-аппаратной форме, например в управляющем устройстве (блоке управления). После опрокидывания транспортное средство может находиться в стабильном положении, лежа, например, на боку или на крыше. Первая ось координат может представлять собой поперечную или продольную ось транспортного средства. Вторая ось координат может представлять собой вертикальную ось транспортного средства. Датчик ускорения может иметь по меньшей мере одну ось чувствительности. Если выполняется коррекция нулевой точки, то полезный сигнал второго датчика ускорения может подвергаться коррекции относительно по меньшей мере одного регулировочного значения. Исполнение первого датчика ускорения может не предусматривать коррекцию нулевой точки. Другими словами, первый датчик ускорения может оставаться с течением времени стабильным или устойчивым к смещению. Шаги считывания, установки и, в дополнительном или альтернативном варианте, выполнения могут выполняться непрерывным образом. Способ может также включать шаг определения величины разности между первым сигналом датчика и вторым сигналом датчика.
В одном варианте осуществления изобретения на шаге установки пороговое значение сигнала может быть установлено в зависимости от результата сравнения величины разности с пороговым значением. Этот вариант осуществления изобретения обладает тем преимуществом, что позволяет нетрудоемким и быстрым образом установить пороговое значение сигнала, соответствующее текущей ситуации.
На шаге установки порогового значения сигнала это значение может быть также повышено или установлено на более высокий уровень, если разность переходит вниз через пороговое значение. При этом пороговое значение сигнала может быть понижено или установлено на более низкий уровень, если разность переходит вверх через пороговое значение. Этот вариант осуществления изобретения обладает тем преимуществом, что позволяет надежно установить, в зависимости от фактической коррекции нулевой точки второго датчика ускорения, пороговое значение сигнала, пригодное для достоверного распознания опрокидывания.
Кроме того, на шаге установки порогового значения сигнала это значение может устанавливаться ступенчатым или плавным образом. Точнее говоря, пороговое значение сигнала может при этом регулироваться со временем ступенчатым или плавным образом. Этот вариант осуществления изобретения обладает тем преимуществом, что позволяет правильно распознать также и медленное опрокидывание и избежать ложного распознания в случае быстрого процесса или отсутствия события опрокидывания, как например при криволинейном движении на повороте.
Кроме того, на шаге генерирования сигнала опрокидывания последний может быть сгенерирован в зависимости от результата другого сравнения первого сигнала датчика с другим пороговым значением сигнала. Этот вариант осуществления изобретения обладает тем преимуществом, что позволяет распознавать опрокидывание транспортного средства еще более надежно и точно.
В другом варианте осуществления изобретения на шаге выполнения сравнения может быть проверено, переходит ли третий сигнал датчика вверх через пороговое значение в пределах заданного интервала времени, либо переходит ли первый сигнал датчика вверх через другое пороговое значение в пределах заданного интервала времени и переходит ли третий сигнал датчика вверх через пороговое значение в пределах заданного интервала времени. Этот вариант осуществления изобретения обладает тем преимуществом, что позволяет еще более снизить вероятность ложного распознания опрокидывания.
В изобретении также предлагается управляющее устройство, выполненное с возможностью осуществления шагов предлагаемого способа в одном из вариантов его осуществления путем управления, выполняемого в соответствующих устройствах. Этот вариант осуществления изобретения, представленный в форме управляющего устройства, тоже позволяет быстро и эффективно решить задачу, положенную в основу изобретения.
Для этого управляющее устройство может содержать по меньшей мере один вычислительный блок для обработки сигналов или данных, по меньшей мере один запоминающий блок для сохранения в памяти сигналов или данных, по меньшей мере один интерфейс для датчика или исполнительного элемента, служащий для считывания с датчика его сигналов или для выдачи управляющих сигналов на исполнительный элемент, и/или по меньшей мере один коммуникационный интерфейс для ввода или вывода данных, внесенных в коммуникационный протокол. Вычислительный блок может представлять собой, например, процессор обработки сигналов, микроконтроллер и т.п., а запоминающий блок - флэш-накопитель, электрически перепрограммируемое постоянное запоминающее устройство (ЭППЗУ) или магнитный накопитель. Коммуникационный интерфейс может быть выполнен с возможностью ввода или вывода данных посредством беспроводной и/или проводной связи, причем коммуникационный интерфейс, выполненный с возможностью ввода или вывода данных посредством проводной связи, может осуществлять, например электрическим или оптическим способом, ввод этих данных из соответствующей линии передачи данных или их вывод в соответствующую линию передачи данных.
В контексте настоящего описания под управляющим устройством может пониматься электрическое устройство, выполняющее обработку сигналов датчика и выдающее в зависимости от этого сигналы управления и/или данных. Управляющее устройство может содержать интерфейс, который может быть реализован аппаратными и/или программными средствами. В случае реализации аппаратными средствами интерфейсы могут представлять собой, например, часть так называемой специализированной, или заказной, интегральной схемы -ASIC (от англ. "Application-Specific Integrated Circuit"), которая может охватывать самые разные функции управляющего устройства. Существует, однако, также возможность исполнения этих интерфейсов в виде собственных интегрированных коммутируемых схем или в виде компонентов, которые по меньшей мере частично состоят из дискретных конструктивных элементов. В случае реализации программными средствами интерфейсы могут представлять собой программные модули, имеющиеся, например, в микроконтроллере наряду с другими программными модулями.
В предпочтительном варианте осуществления изобретения посредством управляющего устройства выполняется распознавание опрокидывания транспортного средства или управление процессом распознавания опрокидывания транспортного средства. Для этого управляющее устройство может использовать, например, сигналы датчиков, таких как датчики ускорения и угловой скорости рыскания. Управляющее устройство выполнено с возможностью генерирования сигнала опрокидывания с использованием сигналов датчика, если установлено наличие опрокидывания. Могут быть также реализованы инициирование, активация или управление применительно к по меньшей мере одной функции помощи водителю, например функции вызова экстренных оперативных служб.
Преимущество изобретения заключается также в компьютерном программном продукте, представляющем собой компьютерную программу с программным кодом, выполненном с возможностью сохранения на машиночитаемом носителе информации, или в запоминающем устройстве, таком как полупроводниковое запоминающее устройство (ЗУ), ЗУ на жестком магнитном диске или оптическое ЗУ, и используемом для выполнения и применения шагов способа и/или управления этими шагами в соответствии с описанными выше вариантами осуществления изобретения, в частности в процессе работы этого программного продукта / этой программы на компьютере или каком-либо ином устройстве.
Кроме того, предлагается система помощи водителю транспортного средства, обладающая по меньшей мере следующими признаками:
- вышеупомянутое управляющее устройство (блок управления), соответствующее одному из вариантов осуществления изобретения,
- первый датчик ускорения, обладающий устойчивостью к смещению,
- второй датчик ускорения, с коррекцией нулевой точки,
причем первый датчик ускорения, второй датчик ускорения и управляющее устройство являются соединяемыми или соединенными друг с другом с возможностью передачи сигналов.
Таким образом, в этой системе помощи водителю может быть благоприятным образом использовано вышеупомянутое управляющее устройство в одном из вариантов осуществления с целью распознавания опрокидывания транспортного средства.
Краткое описание чертежей
Примеры осуществления изобретения, соответствующие поставленной задаче, показаны на чертежах и более подробно поясняются в приведенном ниже описании. На чертежах показано:
на фиг. 1 - схематическое изображение системы помощи водителю, соответствующей одному из примеров осуществления изобретения и предусмотренной в транспортном средстве,
на фиг. 2 - схема последовательности операций способа распознавания согласно одному из примеров осуществления изобретения,
на фиг. 3 - график зависимости ускорения от времени в одном из примеров осуществления изобретения,
на фиг. 4 - график зависимости порогового значения сигнала от величины разности в одном из примеров осуществления изобретения,
на фиг. 5 - график зависимости ускорения от времени в одном из примеров осуществления изобретения,
на фиг. 6 - график зависимости ускорения от времени в одном из примеров осуществления изобретения,
на фиг. 7 - график зависимости ускорения от времени в одном из примеров осуществления изобретения,
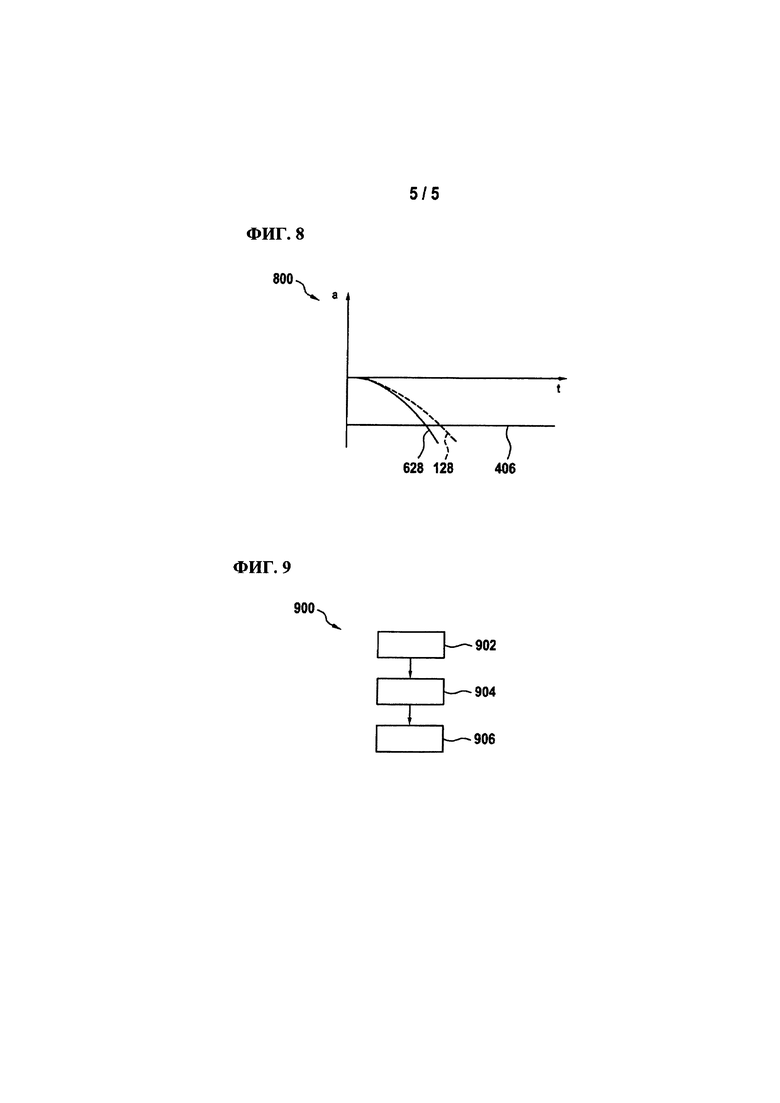
на фиг. 8 - график зависимости ускорения от времени в одном из примеров осуществления изобретения,
на фиг. 9 - схема последовательности операций процесса распознавания согласно одному из примеров осуществления изобретения.
Описание примеров осуществления изобретения
В приведенном ниже изложении предпочтительных вариантов осуществления изобретения используются одинаковые или схожие ссылочные обозначения элементов, изображенных на разных чертежах и имеющих схожие функции, при этом описание этих элементов не повторяется.
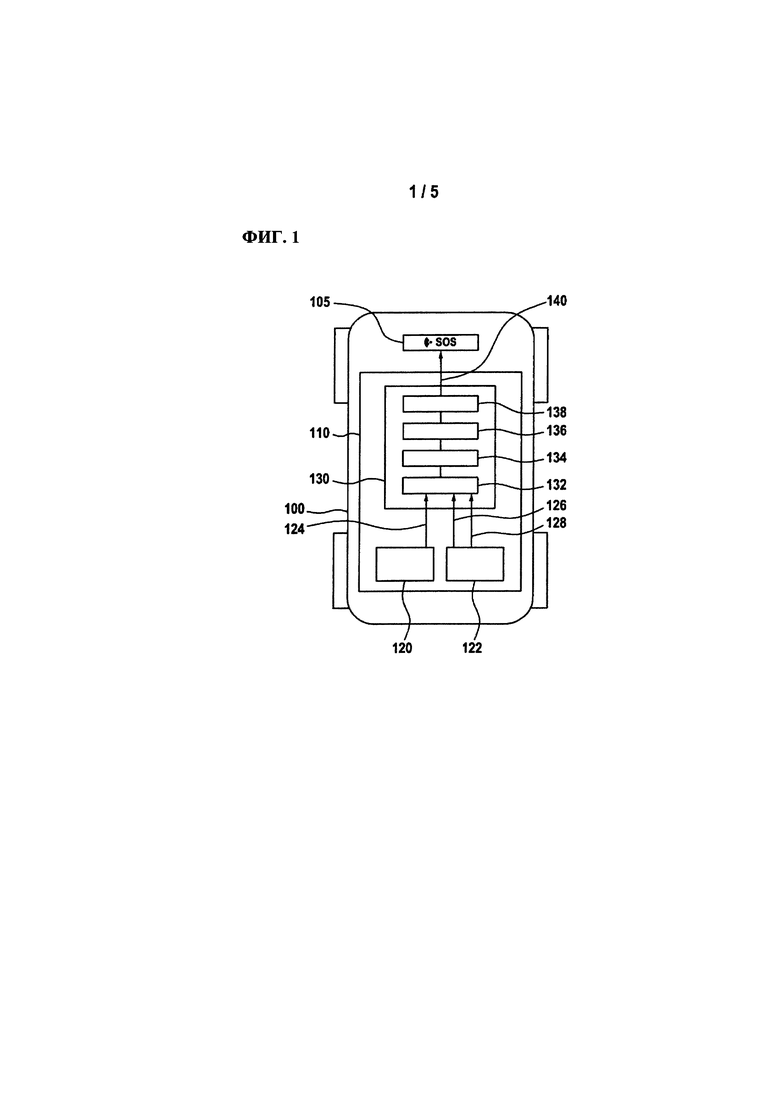
На фиг. 1 представлено схематическое изображение системы 110 помощи водителю, соответствующей одному из примеров осуществления изобретения и предусмотренной в транспортном средстве 100. Транспортное средство 100 представляет собой, например, автомобиль, в частности легковой автомобиль, грузовой автомобиль, либо другое транспортное средство, используемое для перевозки пассажиров и грузов или для выполнения работ. В примере осуществления изобретения, показанном на фиг. 1, транспортное средство 100 содержит функцию 105 помощи водителю и систему 110 помощи водителю. Функция 105 помощи водителю и система 110 помощи водителю соединены друг с другом с возможностью передачи сигналов. Функция 105 помощи водителю предназначен, например, для вызова экстренных оперативных служб.
Система 110 помощи водителю, представленная в примере осуществления изобретения, показанном на фиг. 1, содержит первый датчик 120 ускорения, выполненный с устойчивостью к смещению, второй датчик 122 ускорения с коррекцией нулевой точки и управляющее устройство 130. Первый датчик 120 ускорения, второй датчик 122 ускорения и управляющее устройство 130 соединены друг с другом с возможностью передачи сигналов. Управляющее устройство 130 выполнено с возможностью распознавания, или управления процессом распознавания, опрокидывания транспортного средства 100.
Первый датчик 120 ускорения и второй датчик 122 ускорения выполнены с возможностью регистрации значений ускорения относительно по меньшей мере одной оси чувствительности. При этом одна ось чувствительности простирается вдоль продольной, поперечной или вертикальной оси транспортного средства 100. Например, первый датчик 120 ускорения может представлять собой часть другого функционального устройства транспортного средства, в частности электронной системы динамической стабилизации ESP, а второй датчик 122 ускорения может представлять собой часть еще одного функционального устройства, например управляющего устройства воздушной подушки безопасности.
Первый датчик 120 ускорения выполнен с возможностью генерирования первого сигнала 124 датчика. Первый сигнал 124 датчика представляет собой значения ускорения относительно первой оси координат транспортного средства 100. Второй датчик 122 ускорения выполнен с возможностью генерирования второго сигнала 126 датчика и третьего сигнала 128 датчика. Второй сигнал 126 датчика представляет собой значения ускорения относительно первой оси координат транспортного средства 100. Третий сигнал 128 датчика представляет собой значения ускорения относительно второй оси координат транспортного средства 100, которая перпендикулярна первой оси координат. Первая ось координат транспортного средства 100 может представлять собой, например, поперечную ось этого транспортного средства. Вторая ось координат транспортного средства 100 может представлять собой, например, вертикальную ось этого транспортного средства.
Управляющее устройство 130 выполнено с возможностью генерирования -с использованием первого сигнала 124 датчика, второго сигнала 126 датчика и третьего сигнала 128 датчика, - сигнала 140 опрокидывания, отображающего наличествующее, то есть состоявшееся или происходящее, опрокидывание транспортного средства 100. Для этого в управляющем устройстве 130 предусмотрены считывающий блок 132, задающий блок 134, исполнительный блок 136 и блок 138 генерирования.
Считывающий блок 132 выполнен с возможностью считывания первого сигнала 124 датчика, второго сигнала 126 датчика и третьего сигнала 128 датчика с по меньшей мере одного интерфейса, предусмотренного для первого датчика 120 ускорения и второго датчика 122 ускорения. Кроме того, считывающий блок 132 выполнен с возможностью передачи первого сигнала 124 датчика и второго сигнала 126 датчика в задающий блок 134, а третьего сигнала 128 датчика - в исполнительный блок 136.
Задающий блок 134 выполнен с возможностью установки порогового значения сигнала в зависимости от величины разности между первым сигналом 124 датчика и вторым сигналом 126 датчика. Кроме того, задающий блок 134 выполнен с возможностью передачи установленного порогового значения сигнала в исполнительный блок 136. Исполнительный блок 136 выполнен с возможностью выполнения сравнения третьего сигнала 128 датчика с установленным пороговым значением сигнала. Кроме того, исполнительный блок 136 выполнен с возможностью передачи результата выполненного сравнения в форме сигнала в блок 138 генерирования. Блок 138 генерирования выполнен с возможностью генерирования сигнала 140 опрокидывания в зависимости от результата сравнения.
В частности, блок 138 генерирования, представленный в примере осуществления изобретения, показанном на фиг. 1, выполнен с возможностью генерирования сигнала 140 опрокидывания для выдачи в функцию 105 помощи водителю. Сигнал 140 опрокидывания, используемый функцией 105 помощи водителю, инициирует передачу сигнала вызова экстренных оперативных служб в связи с опрокидыванием транспортного средства 100.
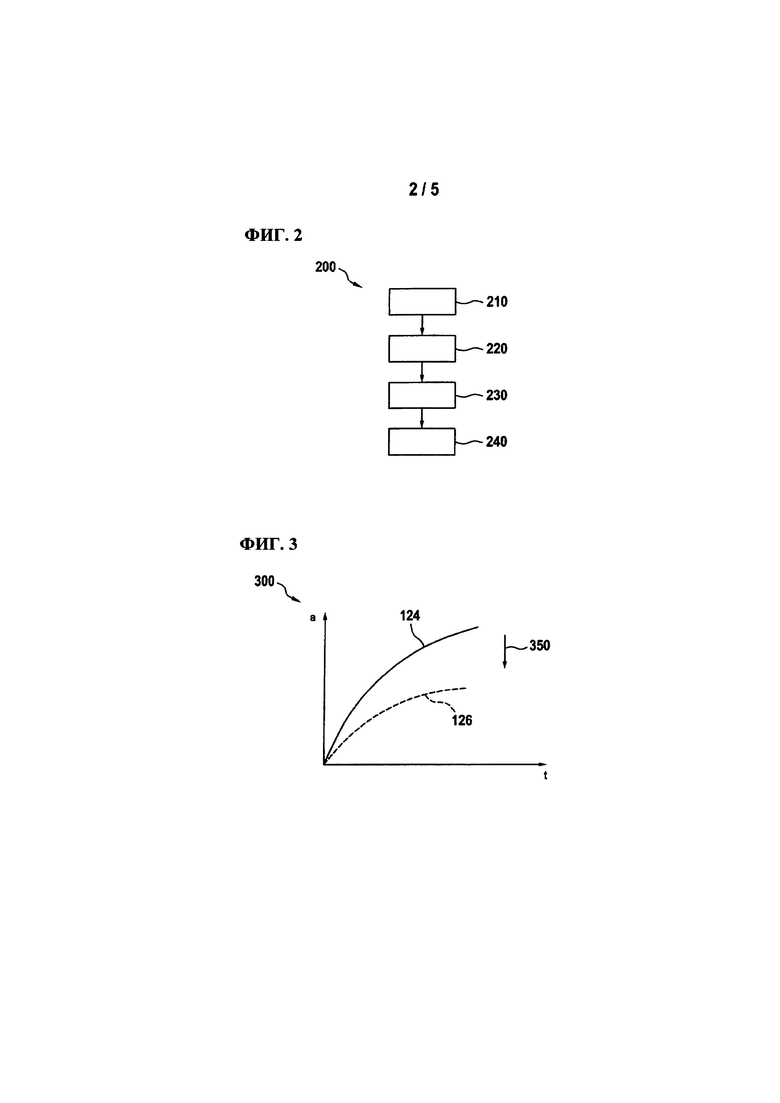
На фиг. 2 показана схема последовательности операций способа 200 распознавания согласно одному из примеров осуществления изобретения. Способ 200 может быть реализован для распознавания опрокидывания транспортного средства. При этом способ 200 может быть реализован для распознавания посредством или с использованием управляющего устройства, показанного на фиг. 1, или аналогичного управляющего устройства. Кроме того, способ 200 может быть реализован для распознавания в сочетании с системой помощи водителю, такой как показана на фиг. 1. Таким образом, способ 200 может быть реализован применительно к транспортному средству, оснащенному первым датчиком 120 ускорения, выполненным с устойчивостью к смещению, и вторым датчиком 122 ускорения с коррекцией нулевой точки аналогично транспортному средству, показанному на фиг. 1.
На шаге 210 считывания способа 200 распознавания выполняется считывание первого сигнала датчика, второго сигнала датчика и третьего сигнала датчика. Первый сигнал датчика представляет собой зарегистрированные первым датчиком ускорения значения ускорения относительно первой оси координат транспортного средства. Второй сигнал датчика представляет собой зарегистрированные вторым датчиком ускорения значения ускорения относительно первой оси координат транспортного средства. Третий сигнал датчика представляет собой зарегистрированные вторым датчиком ускорения значения ускорения относительно второй оси координат транспортного средства, перпендикулярной первой оси координат.
Затем на шаге 220 установки выполняется задание порогового значения сигнала в зависимости от величины разности между первым сигналом датчика и вторым сигналом датчика. После этого на шаге 230 выполнения сравнения проводится сравнение третьего сигнала датчика с пороговым значением сигнала, заданного на шаге 220. Далее на шаге 240 генерирования выполняется генерирование сигнала опрокидывания в зависимости от результата сравнения, выполненного на шаге 230. Сигнал опрокидывания отображает наличие последнего.
В одном варианте осуществления изобретения установка порогового значения сигнала на шаге 220 выполняется в зависимости от результата сравнения величины разности с пороговым значением. В качестве дополнения или альтернативы на шаге 220 установки пороговое значение сигнала повышается или устанавливается на более высокий уровень, если разность переходит вниз через пороговое значение, и понижается или устанавливается на более низкий уровень, если разность переходит вверх через пороговое значение. В частности, на шаге 220 установки пороговое значение сигнала устанавливается ступенчатым или плавным образом.
В другом варианте осуществления изобретения на шаге 240 генерирования сигнала опрокидывания последний генерируется в зависимости от результата другого сравнения первого сигнала датчика с другим пороговым значением сигнала. Например, на шаге 230 выполнения сравнения проверяется, переходит ли третий сигнал датчика вверх через пороговое значение в пределах заданного интервала времени. В альтернативном варианте на шаге 230 выполнения сравнения проверяется, переходит ли первый сигнал датчика вверх через другое пороговое значение в пределах заданного интервала времени и переходит ли третий сигнал датчика вверх через пороговое значение в пределах заданного интервала времени.
На фиг. 3 показан график 300 зависимости ускорения от времени в одном из примеров осуществления изобретения. На графике 300 по оси абсцисс откладывается время t, а по оси ординат - ускорение, регистрируемое датчиками ускорения. График 300 следует рассматривать применительно к системе помощи водителю, показанной на фиг. 1, или к какой-либо аналогичной системе, либо в связи со способом, представленным на фиг. 2, или каким-либо аналогичным способом. Две кривые, показанные на графике 300, отображают первый сигнал 124 датчика ускорения и второй сигнал 126 датчика ускорения. Первый сигнал 124 ускорения представляет собой здесь реальный сигнал и соответствует, например, углу опрокидывания транспортного средства, равному 40 градусам. Второй сигнал 126 ускорения представляет собой сигнал датчика с учетом коррекции нулевой точки и соответствует, например, углу опрокидывания транспортного средства, равному 20 градусам. Кроме того, на графике 300 показана стрелка 350, символизирующая потерю в результате коррекции нулевой точки.
Распознавание опрокидывания транспортного средства основано, например, на измерении вектора гравитации, когда транспортное средство достигает стабильного положения на боку или на крыше. Для этого можно измерить проекции вектора гравитации на оси aY и aZ транспортного средства. Влияние коррекции нулевой точки показано в этом контексте на фиг. 3, в частности для второго сигнала 126 датчика, сравниваемого с первым сигналом 124 датчика с устойчивостью к смещению при медленном вращении вокруг оси X, или продольной оси, транспортного средства. Разность, или величина разности, между первым сигналом 124 датчика и вторым сигналом 126 датчика используется для адаптации порога распознавания к третьему сигналу 128 датчика. При этом второй сигнал 126 датчика и третий сигнал 128 датчика поступают из по меньшей мере одного датчика ускорения с коррекцией смещения, или с коррекцией нулевой точки. Коррекция нулевой точки, или коррекция смещения, может выполняться в самом датчике ускорения или в управляющем устройстве. Скорость коррекции смещения датчиков ускорения не обязательно должна быть одной и той же.
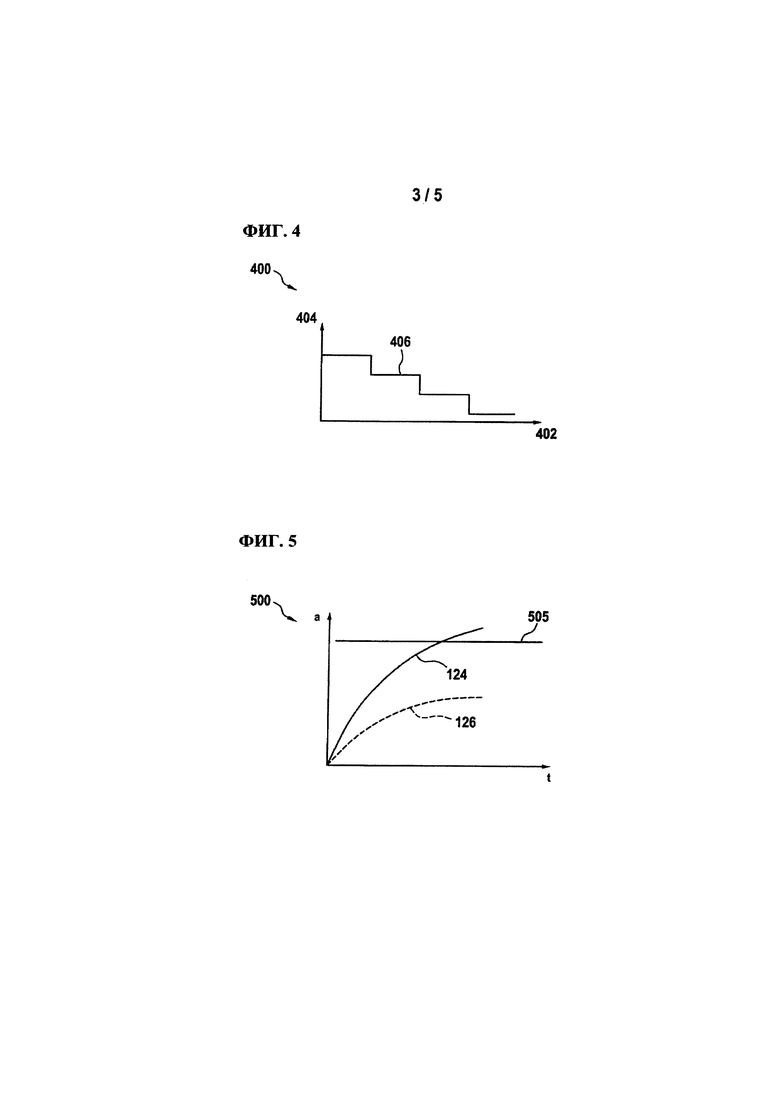
На фиг. 4 показан график 400 зависимости порогового значения сигнала от величины разности в одном из примеров осуществления изобретения. На графике 400 по оси абсцисс откладывается разность 402 между первым и вторым сигналами датчика, показанными на фиг. 3, а по оси ординат - пороговое значение 406 сигнала. График 400 следует рассматривать применительно к системе помощи водителю, показанной на фиг. 1, или к какой-либо аналогичной системе, либо в связи со способом, представленным на фиг. 2, или каким-либо аналогичным способом, а также в связи с графиком, показанным на фиг. 3. Линия графика, показанного на фиг. 4, отображает установленное пороговое значение 406 сигнала. В примере осуществления изобретения, показанном на фиг. 4, линия 406 имеет ступенчатую форму, а отображаемое ею пороговое значение 406 сигнала уменьшается с увеличением разности 402.
Если отклонение первого и второго сигналов датчика друг от друга незначительно, то установленное пороговое значение 406 сигнала не изменяется в сторону уменьшения. Если, однако, разность между первым и вторым сигналами датчика увеличивается, то установленное пороговое значение 406 сигнала уменьшается. Благодаря этому быстрые процессы, например при криволинейном движении на повороте, не приводят к ложному распознанию опрокидывания или к активации функций помощи водителю, потому что установленное пороговое значение 406 сигнала велико, и прохождение поворота обычно длится лишь несколько секунд, а не минут как при медленном вращении. Вследствие этого величина разности 402 мала, а пороговое значение 406 сигнала - велико. Это пороговое значение действительно и для третьего сигнала датчика, который при криволинейном движении на повороте переходит через это пороговое значение вниз. Это делает ложное распознание маловероятным.
На фиг. 5 показан график 500 зависимости ускорения от времени в одном из примеров осуществления изобретения. График 500 на фиг. 5 соответствует графику на фиг. 3, за тем исключением, что на нем показано другое пороговое значение 505 для первого сигнала 124 датчика и/или второго сигнала 126 датчика. В примере осуществления изобретения, показанном на фиг. 5, через это другое пороговое значение 505 сигнала переходит вверх лишь первый сигнал 124 датчика.
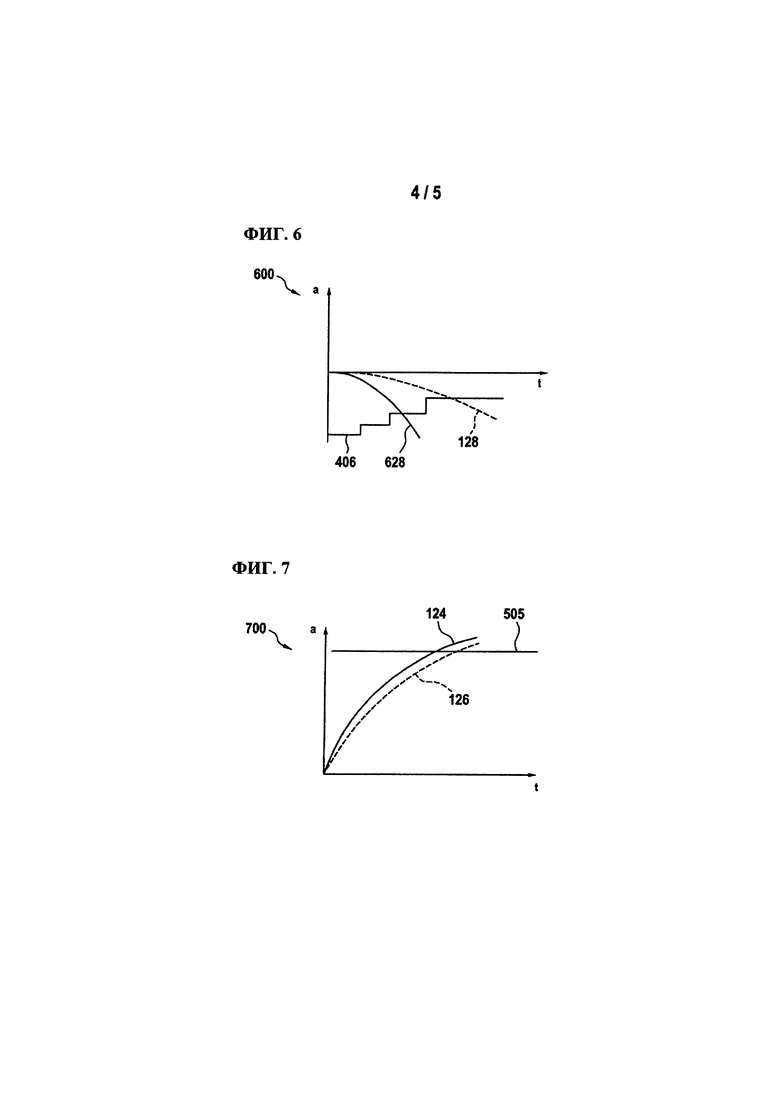
На фиг. 6 показан график 600 зависимости ускорения от времени в одном из примеров осуществления изобретения. На графике 600 по оси абсцисс откладывается время t, а по оси ординат - ускорение, регистрируемое датчиками ускорения. График 600 следует рассматривать применительно к системе помощи водителю, показанной на фиг. 1, или к какой-либо аналогичной системе, либо в связи со способом, представленным на фиг. 2, или каким-либо аналогичным способом, а также в связи с графиком на фиг. 5. Две кривые, показанные на графике 600, отображают третий сигнал 128 ускорения и реальный третий сигнал 628 ускорения. Кроме того, на графике 600 показана линия 406, отображающая установленное пороговое значение аналогично линии, показанной на фиг. 4. Установленное пороговое значение 406 сигнала представляет собой, например, адаптивный порог по оси aZ. Третий сигнал 128 ускорения и реальный третий сигнал 628 ускорения переходят здесь через установленное пороговое значение 406 в разных точках, или на разных заданных уровнях.
Сценарий, представленный исключительно в качестве примера со ссылками на фиг. 5 и 6, описывает ситуацию, когда транспортное средство медленно едет вдоль склона. Заметная коррекция нулевой точки в случае второго сигнала 126 датчика и третьего сигнала 128 датчика приводит к медленному приведению этих сигналов к нулю. Расхождение между первым сигналом 124 датчика и вторым сигналом 126 датчика увеличивается с течением времени. Это приводит к уменьшению установленного порогового значения 406 для третьего сигнала 128 датчика, так что в случае опрокидывания на бок и остановки транспортного средства нахождение последнего в положении "лежа на боку" при чувствительном к отклонению установленном пороговом значении 406 сигнала и устойчивом к отклонению другом пороговом значении 505 для сигнала 124 датчика может быть достоверно распознано несмотря на выполнение коррекции нулевой точки, или коррекции смещения. Без такого согласования, или регулирования, порогового значения 406 сигнала медленное опрокидывание на бок не было бы распознано, поскольку не выполнялся бы критерий для оси aZ или, иначе, пришлось бы выбрать такое низкое пороговое значение для aZ-критерия, что это делало бы возможной ложную активацию вызова экстренных оперативных служб и при значениях ниже предела опрокидывания транспортного средства, а именно, в частности, при динамических событиях, которые сопряжены с высоким поперечным ускорением, перекрытием порога 505 и низким ускорением по оси aZ, которое могло бы быть выше этого низкого порогового значения.
На фиг. 7 показан график 700 зависимости ускорения от времени в одном из примеров осуществления изобретения. График 700 на фиг. 7 соответствует графику на фиг. 5, за тем исключением, что имеет место меньшее расхождение между первым сигналом 124 датчика и вторым сигналом 126 датчика, так что кривая второго сигнала 126 датчика расположена ближе к кривой первого сигнала 124 датчика и тоже переходит вверх через другое пороговое значение 505 сигнала.
На фиг. 8 показан график 800 зависимости ускорения от времени в одном из примеров осуществления изобретения. График 800 на фиг. 8 соответствует графику на фиг. 6, за тем исключением, что установленное пороговое значение 406 сигнала остается постоянным с течением времени.
Сценарий, представленный исключительно в качестве примера со ссылками на фиг. 7 и 8, описывает ситуацию, когда происходит опрокидывание транспортного средства вокруг его продольной оси, или оси X, до положения "лежа на боку". Как правило, опрокидывание длится всего несколько секунд, так что коррекция нулевой точки, или коррекция смещения, обычно составляет лишь незначительное число мг/с и, в зависимости от обстоятельств, не дает существенного эффекта. Вследствие этого расхождение между первым сигналом 124 датчика и вторым сигналом 126 датчика невелико. Пороговое значение 406 сигнала не изменяется либо не изменяется многоступенчатым образом, но поскольку транспортное средство лежит на боку, это положение "лежа на боку" достоверно распознается с помощью первого сигнала 124 датчика и третьего сигнала 128 датчика.
На фиг. 9 показана схема последовательности операций процесса 900 распознавания согласно одному из примеров осуществления изобретения. Процесс 900 представляет собой парциальный процесс способа, показанного на фиг. 2, или аналогичного способа. Выполнение процесса 900 обеспечивает возможность распознания опрокидывания транспортного средства.
На первом шаге 902 осуществляется вычисление или определение величины разности. После этого процесс 900 переходит ко второму шагу 904, на котором осуществляется вычисление или определение порогового значения сигнала. Затем процесс 900 переходит к третьему шагу 906, на котором выполняется сравнение третьего сигнала датчика с этим пороговым значением сигнала.
Другими словами, схема последовательности операций, или блок-схема, представленная на фиг. 9, показывает шаги, относящиеся к установке порогового значения сигнала, или aZ-порога. В зависимости от структуры алгоритма, или процесса, 900 в одном из примеров осуществления изобретения может быть предусмотрено, что для распознавания стационарного конечного положения транспортного средства при подозрении на опрокидывание необходимо, чтобы третий сигнал датчика в течение определенного времени превышал пороговое значение, или, в альтернативном варианте, первый и третий сигналы датчика в течение определенного времени превышали свои соответствующие пороговые значения.
Примеры осуществления, а также основные принципы и возможности применения настоящего изобретения еще раз обобщенно представлены и/или кратко поясняются ниже со ссылкой на вышеупомянутые чертежи.
Распознавание опрокидывания транспортного средства 100 согласно примерам осуществления настоящего изобретения можно отнести к двум типам. Подходы, основанные на угловой скорости рыскания, отражают, например, уровень техники в области управления системами защиты водителя и пассажиров, такими как, например, воздушные подушки безопасности. Подходы, основанные на ускорении, используются для экономичного отображения вторичных функций, некритичных ко времени, таких как вызов экстренных оперативных служб или разблокирование дверей транспортного средства 100.
Подходы, основанные на ускорении, могут быть ориентированы в первую очередь на распознавание стабильного положения транспортного средства 100, лежащего после опрокидывания на боку или на крыше. С целью получения экономичных решений для отображения таких функций обычно используют датчики с коррекцией смещения в направлениях aY и aZ, которые в представленных примерах осуществления настоящего изобретения могут быть скомбинированы во втором датчике 122 ускорения. Коррекция смещения служит для приведения с малой скоростью к нулю сигнала, в данном случае второго сигнала 126 датчика и третьего сигнала 128 датчика. Эта концепция особенно хорошо применима к событию, протяженность которого во времени значительно меньше, чем длительность выполнения коррекции смещения, или коррекции нулевой точки.
Если, однако, вращение транспортного средства 100 до перехода в стабильное положение на боку или на крыше продолжается очень долго, то коррекция смещения становится заметной. Здесь имеет место перекрытие интервалов времени протекания события и выполнения коррекции смещения. Это может привести к потере реального полезного сигнала, однако при этом, согласно изобретению, сохраняется возможность распознания опрокидывания без установки таких низких пороговых значений, что при нормальной езде транспортного средства 100 или в аналогичной ситуации сохранялась бы повышенная вероятность ложного распознания. Тем самым можно, например, избежать повторяющегося ложноположительного срабатывания устройства вызова экстренных оперативных служб.
Например, в транспортных устройствах 100 используются датчики системы динамической стабилизации ESP, обладающие, в частности, устойчивостью к смещению в направлении aY. Это означает, что смещение датчика, в данном случае первого датчика 120 ускорения, не должно выходить за пределы определенного диапазона в течение его срока службы и под воздействием температуры. Такие датчики ускорения с устойчивостью к смещению применимы для распознавания медленного движения, или опрокидывания, поскольку в них не предусмотрена коррекция смещения. Однако система ESP обычно требует использования датчиков с устойчивостью к смещению в направлениях аХ и aY, но не в направлении aZ, то есть вдоль вертикальной оси транспортного средства 100. Направление же aZ является важным для распознавания медленного вращения. В качестве альтернативы системе ESP можно также использовать другое управляющее устройство или другую функцию помощи водителю, содержащий датчик ускорения с устойчивостью к смещению, в частности датчик aY.
В связи с законодательными положениями, касающимися автоматической активации вызова экстренных оперативных служб после опрокидывания транспортного средства, может быть выполнено сертификационное испытание, предусматривающее медленное вращение транспортного средства 100 вокруг своей продольной оси. Таким образом, с учетом возможного принятия соответствующих законодательных положений можно, в частности, реализовать (без каких-либо компромиссов в отношении надежности) предусмотренное при определенных обстоятельствах сертификационное испытание посредством обычных датчиков, используемых в воздушных подушках безопасности. Изобретение в представленных примерах осуществления позволяет снизить вероятность ложноположительного срабатывания функции 105 вызова экстренных оперативных служб и тем самым повысить надежность распознавания опрокидывания.
Союз "и/или", используемый в каком-либо из примеров осуществления настоящего изобретения применительно к связи между каким-либо первым отличительным признаком и каким-либо вторым отличительным признаком, следует интерпретировать в том смысле, что изобретение в одном варианте осуществления содержит как первый, так и второй признак, а в другом варианте осуществления содержит либо только первый, либо только второй признак.
Изобретение относится к способу и управляющему устройству для распознавания опрокидывания транспортного средства и системе помощи водителю. Способ распознавания опрокидывания транспортного средства, оснащенного первым датчиком ускорения, обладающим устойчивостью к смещению, и вторым датчиком ускорения, с коррекцией нулевой точки, включает считывание первого сигнала датчика, второго сигнала датчика и третьего сигнала датчика, установку порогового значения сигнала в зависимости от величины разности между первым сигналом датчика и вторым сигналом датчика, выполнение сравнения третьего сигнала датчика с установленным пороговым значением сигнала, генерирование, в зависимости от результата сравнения, сигнала опрокидывания, отображающего наличие опрокидывания. Первый сигнал датчика представляет собой зарегистрированные первым датчиком ускорения значения ускорения относительно первой оси координат транспортного средства, второй сигнал датчика представляет собой зарегистрированные вторым датчиком ускорения значения ускорения относительно первой оси координат транспортного средства, а третий сигнал датчика представляет собой зарегистрированные вторым датчиком ускорения значения ускорения относительно второй оси координат транспортного средства, перпендикулярной первой оси координат. Достигается повышение безопасности управления транспортным средством. 4 н. и 5 з.п. ф-лы, 9 ил.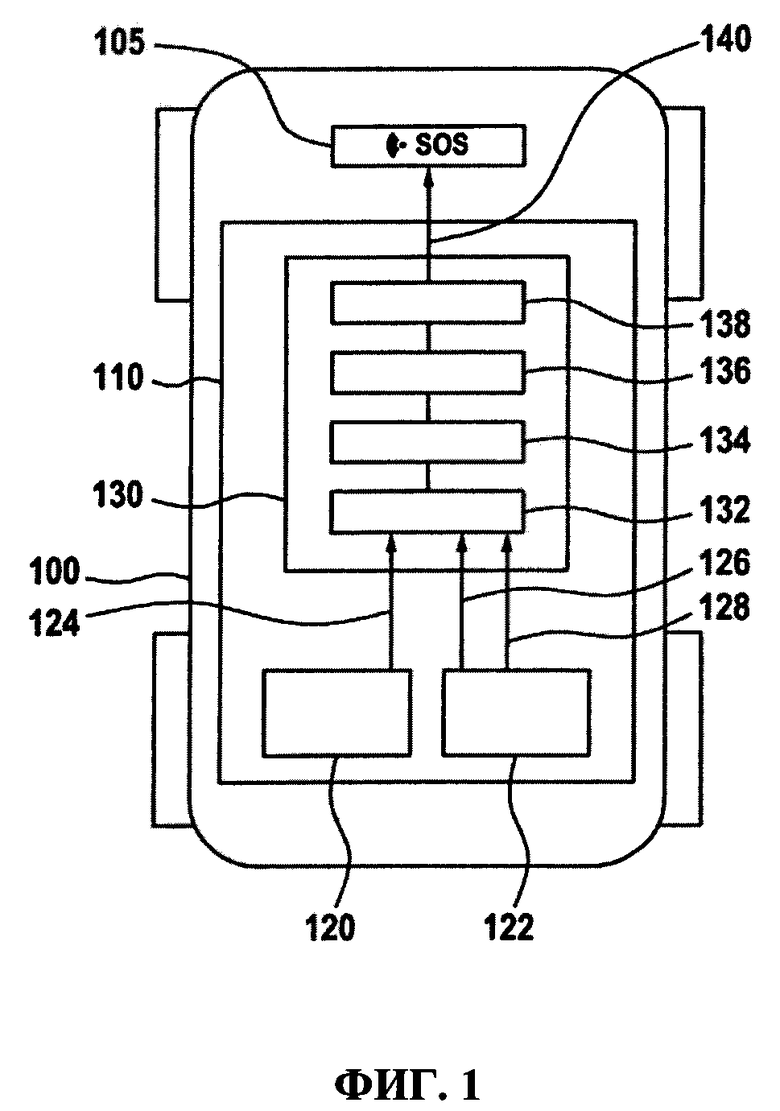
1. Способ (200) распознавания опрокидывания транспортного средства, оснащенного первым датчиком (120) ускорения, обладающим устойчивостью к смещению, и вторым датчиком (122) ускорения, с коррекцией нулевой точки, включающий следующие шаги:
- считывание (210) первого сигнала (124) датчика, второго сигнала (126) датчика и третьего сигнала (128) датчика, причем первый сигнал (124) датчика представляет собой зарегистрированные первым датчиком (120) ускорения значения ускорения относительно первой оси координат транспортного средства (100), второй сигнал (126) датчика представляет собой зарегистрированные вторым датчиком (122) ускорения значения ускорения относительно первой оси координат транспортного средства (100), а третий сигнал (128) датчика представляет собой зарегистрированные вторым датчиком (122) ускорения значения ускорения относительно второй оси координат транспортного средства (100), перпендикулярной первой оси координат,
- установка (220) порогового значения (406) сигнала в зависимости от величины разности (402) между первым сигналом (124) датчика и вторым сигналом (126) датчика,
- выполнение (230) сравнения третьего сигнала (128) датчика с установленным пороговым значением (406) сигнала,
- генерирование (240), в зависимости от результата сравнения, сигнала (140) опрокидывания, отображающего наличие опрокидывания.
2. Способ (200) по п. 1, в котором на шаге (220) установки пороговое значение (406) сигнала устанавливается в зависимости от результата сравнения величины разности (402) с пороговым значением.
3. Способ (200) по одному из предыдущих пунктов, в котором на шаге (220) установки пороговое значение (406) сигнала повышается или устанавливается на более высокий уровень, если разность (402) переходит вниз через пороговое значение, и пороговое значение (406) сигнала понижается или устанавливается на более низкий уровень, если разность (402) переходит вверх через пороговое значение.
4. Способ (200) по одному из предыдущих пунктов, в котором на шаге (220) установки пороговое значение (406) сигнала устанавливается ступенчатым или плавным образом.
5. Способ (200) по одному из предыдущих пунктов, в котором на шаге (240) генерирования сигнал (140) опрокидывания генерируется в зависимости от результата другого сравнения первого сигнала (124) датчика с другим пороговым значением (505) сигнала.
6. Способ (200) по одному из предыдущих пунктов, в котором на шаге (230) выполнения сравнения проверяется, переходит ли третий сигнал (128) датчика вверх через пороговое значение (406) в пределах заданного интервала времени, либо переходит ли первый сигнал (124) датчика вверх через другое пороговое значение (505) в пределах заданного интервала времени и переходит ли третий сигнал (128) датчика вверх через пороговое значение (406) в пределах заданного интервала времени.
7. Управляющее устройство (130), выполненное с возможностью осуществления шагов способа (200) по одному из предыдущих пунктов в соответствующих блоках (132, 134, 136, 138).
8. Система (110) помощи водителю транспортного средства (100), обладающая по меньшей мере следующими признаками:
- управляющее устройство (130) по п. 7,
- первый датчик (120) ускорения, обладающий устойчивостью к смещению,
- второй датчик (122) ускорения, с коррекцией нулевой точки,
причем первый датчик (120) ускорения, второй датчик (122) ускорения и управляющее устройство (130) являются соединяемыми или соединенными друг с другом с возможностью передачи сигналов.
9. Машиночитаемый носитель данных, содержащий компьютерную программу, при выполнении которой осуществляется способ (200) по одному из предыдущих пунктов.
| US 9266488 B2, 23.02.2016 | |||
| US 9200898 B2, 01.12.2015 | |||
| ДАТЧИК АВАРИИ И СПОСОБ ОБРАБОТКИ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ИЗМЕРИТЕЛЬНОГО СИГНАЛА | 2007 |
|
RU2441779C2 |

