Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству или способу согласно ограничительной части независимых пунктов формулы изобретения. Кроме того, настоящее изобретение может быть на машиночитаемом носителе, содержащем соответствующую компьютерную программу.
Уровень техники
Опрокидывание транспортного средства может быть обнаружено, после чего может быть автоматически выполнен вызов экстренных оперативных служб. Существует несколько различных видов такого опрокидывания.
Раскрытие изобретения
В соответствии с вышеизложенным, в настоящем изобретении поставлена задача разработки способа, управляющего устройства (блока управления), в котором применяется этот способ, и соответствующей компьютерной программы, представленных в независимых пунктах формулы изобретения. Варианты осуществления изобретения, приведенные в зависимых пунктах формулы изобретения, предоставляют возможность внесения изменений и усовершенствований в устройство, описанное в независимом пункте формулы изобретения.
Настоящее изобретение в различных вариантах его осуществления позволяет надежно и точно активировать функцию вызова экстренных оперативных служб при медленном опрокидывании транспортного средства несмотря на компенсацию смещения, или коррекцию нулевой точки, датчика ускорения. Основой для этого служит, например, установленный факт, что при малом - несмотря на достигнутый в статическом положении большой угол поперечного наклона, - полезном сигнале датчика ускорения может быть выполнена коррекция высокого значения, обусловливающего малую величину этого полезного сигнала несмотря на большой угол поперечного наклона, например относительно поперечной и вертикальной осей, или направлений a Y и aZ, транспортного средства. Если в статическом положении достигается меньший угол поперечного наклона, то величина коррекции смещения тоже может, например, принимать лишь малые значения, поскольку расстояние до нулевого положения, или нулевой точки, может быть соответственно малым. По достижении нулевого положения выполнение коррекции смещения прекращается.
Изобретение в различных вариантах его осуществления предоставляет, в частности, благоприятную возможность надежного и точного обнаружения, посредством датчиков ускорения, медленного опрокидывания, например в вертикальном направлении и, в альтернативном варианте, также в боковом направлении, или относительно вертикальной оси и, в альтернативном варианте, также относительно поперечной оси транспортного средства, в том числе при медленной коррекции нулевой точки датчиков. Благодаря этому обеспечивается возможность надежного различения ситуаций с большими и малыми углами поперечного наклона несмотря на выполнение коррекции смещения, или коррекции нулевой точки, датчиков ускорения. Это позволяет избежать ложноположительного срабатывания функциональных устройств помощи водителю.
Предлагается способ управления по меньшей мере одной функцией помощи водителю в случае опрокидывания транспортного средства, оснащенного по меньшей мере одним датчиком ускорения с коррекцией нулевой точки, включающий следующие шаги:
- считывание сигнала датчика и сигнала коррекции или считывание сигнала датчика и определение сигнала коррекции с использованием сигнала датчика, причем сигнал датчика представляет собой значения ускорения, зарегистрированные по меньшей мере одним датчиком ускорения, а сигнал коррекции представляет собой регулировочные значения для коррекции нулевой точки по меньшей мере одного датчика ускорения,
- выполнение первого сравнения сигнала датчика с первым пороговым значением и со вторым пороговым значением и второго сравнения сигнала коррекции с третьим пороговым значением, причем первое и второе пороговые значения представляют собой значения ускорения, причем первое пороговое значение поставлено в соответствие статическому углу опрокидывания транспортного средства и представляет собой более высокое значение ускорения, чем второе пороговое значение, а третье пороговое значение представляет собой регулировочное значение, поставленное в соответствие разности между первым и вторым пороговыми значениями,
- распознавание наличия опрокидывания в зависимости от результата первого сравнения и результата второго сравнения,
- генерирование сигнала опрокидывания для выдачи в по меньшей мере одну функцию помощи водителю, если на соответствующем шаге было распознано наличие опрокидывания.
Данный способ может быть, например, реализован программными или аппаратными средствами либо в смешанной программно-аппаратной форме, например в управляющем устройстве (блоке управления). Под опрокидыванием транспортного средства может пониматься вращательное движение этого транспортного средства вокруг его продольной или поперечной оси и, в качестве дополнения или альтернативы, обусловленное этим положение транспортного средства. Датчик ускорения может иметь по меньшей мере одну ось чувствительности. Если выполняется коррекция нулевой точки, то полезный сигнал по меньшей мере одного датчика ускорения может подвергаться коррекции относительно по меньшей мере одного регулировочного значения. Сигнал коррекции может представлять собой суммарное регулировочное значение. Шаги считывания, сравнения и, в дополнительном или альтернативном варианте, распознавания могут выполняться непрерывным образом. Регулировочное значение, поставленное в соответствие разности между первым и вторым пороговыми значениями, может представлять собой суммарные регулировочные значения. При этом регулировочное значение соответствует разности между первым и вторым пороговыми значениями. Сигнал опрокидывания может предпочтительно отображать выявленное опрокидывание транспортного средства. Сигнал коррекции может предпочтительно считываться, например, если он уже существует, либо определяться с использованием сигнала датчика.
В одном варианте осуществления изобретения наличие опрокидывания может быть распознано на соответствующем шаге, если в пределах заданного интервала времени сигнал датчика переходит вверх через пороговое значение. Переход вверх через пороговое значение может представлять собой достижение этого порогового значения и выход за это пороговое значение. Этот вариант осуществления изобретения обладает тем преимуществом, что при быстром перемещении транспортного средства за пределы статического угла опрокидывания и, следовательно, при быстром опрокидывании может быть быстро активирована по меньшей мере одна функция помощи водителю.
Наличие опрокидывания может быть также распознано на соответствующем шаге, если сигнал датчика переходит вниз через первое пороговое значение и переходит вверх через второе пороговое значение, а сигнал коррекции переходит вверх через третье пороговое значение. Этот вариант осуществления изобретения обладает тем преимуществом, что обеспечивает надежное различение ситуаций с наличием и отсутствием опрокидывания и, следовательно, позволяет избежать ложноположительного срабатывания функциональных устройств помощи водителю или по меньшей мере свести его к минимуму. Благодаря этому можно также надежно обнаружить медленное опрокидывание.
Кроме того, наличие опрокидывания может быть также распознано на соответствующем шаге, если переход сигнала датчика вверх через второе пороговое значение и сигнала коррекции вверх через третье пороговое значение происходит в пределах заданного интервала времени. Этот вариант осуществления изобретения обладает тем преимуществом, что обеспечивает временную связь между значениями ускорения и регулировочными значениями и, следовательно, позволяет надежно избежать ложноположительного срабатывания функционального устройства помощи водителю.
В частности, на шаге считывания может быть выполнено считывание сигнала датчика, представляющего собой зарегистрированные датчиком ускорения значения ускорения относительно вертикальной оси, поперечной оси и, в качестве дополнения или альтернативы, продольной оси транспортного средства. Этот вариант осуществления изобретения обладает тем преимуществом, что для получения надежной и корректной оценки ситуации с фактическим наличием опрокидывания может, например, оказаться достаточно значений ускорения относительно только одной оси.
Затем на соответствующем шаге может быть сгенерирован сигнал опрокидывания для выдачи в функцию вызова экстренных оперативных служб. При этом сигнал опрокидывания, используемый данной функцией, может инициировать передачу вызова экстренных оперативных служб. Этот вариант осуществления изобретения обладает тем преимуществом, что позволяет своевременно запросить помощь при опрокидывании даже в том возможном случае, когда водитель и пассажиры транспортного средства находятся без сознания.
В изобретении также предлагается управляющее устройство, выполненное с возможностью осуществления шагов предлагаемого способа в одном из вариантов его осуществления путем управления, выполняемого в соответствующих устройствах. Этот вариант осуществления изобретения, представленный в форме управляющего устройства, тоже позволяет быстро и эффективно решить задачу, положенную в основу изобретения.
Для этого управляющее устройство может содержать по меньшей мере один вычислительный блок для обработки сигналов или данных, по меньшей мере один запоминающий блок для сохранения в памяти сигналов или данных, по меньшей мере один интерфейс для датчика или исполнительного элемента, служащий для считывания с датчика его сигналов или для выдачи управляющих сигналов на исполнительный элемент, и/или по меньшей мере один коммуникационный интерфейс для ввода или вывода данных, внесенных в коммуникационный протокол. Вычислительный блок может представлять собой, например, процессор обработки сигналов, микроконтроллер и т.п., а запоминающий блок - флэш-накопитель, электрически перепрограммируемое постоянное запоминающее устройство (ЭППЗУ) или магнитный накопитель. Коммуникационный интерфейс может быть выполнен с возможностью ввода или вывода данных посредством беспроводной и/или проводной связи, причем коммуникационный интерфейс, выполненный с возможностью ввода или вывода данных посредством проводной связи, может осуществлять, например электрическим или оптическим способом, ввод этих данных из соответствующей линии передачи данных или их вывод в соответствующую линию передачи данных.
В контексте настоящего описания под управляющим устройством может пониматься электрическое устройство, выполняющее обработку сигналов датчика и выдающее в зависимости от этого сигналы управления и/или данных. Управляющее устройство может содержать интерфейс, который может быть реализован аппаратными и/или программными средствами. В случае реализации аппаратными средствами интерфейсы могут представлять собой, например, часть так называемой специализированной, или заказной, интегральной схемы -ASIC (от англ. "Application-Specific Integrated Circuit"), которая может охватывать самые разные функции управляющего устройства. Существует, однако, также возможность исполнения этих интерфейсов в виде собственных интегрированных коммутируемых схем или в виде компонентов, которые по меньшей мере частично состоят из дискретных конструктивных элементов. В случае реализации программными средствами интерфейсы могут представлять собой программные модули, имеющиеся в микроконтроллере наряду с другими программными модулями.
В предпочтительном варианте осуществления изобретения управляющее устройство выполняет управление по меньшей мере одной функцией помощи водителю, предусмотренным в транспортном средстве. Для этого управляющее устройство может использовать, например, сигналы датчиков, таких как датчики ускорения и угловой скорости рыскания, и сигналы коррекции датчиков. Управляющее устройство выполнено с возможностью генерирования сигнала опрокидывания с использованием сигнала датчика и сигнала коррекции, если установлено наличие опрокидывания. Управление по меньшей мере одной функцией может выражаться в активации вызова экстренных оперативных служб.
Преимущество изобретения заключается также в компьютерном программном продукте, представляющем собой компьютерную программу с программным кодом, выполненном с возможностью сохранения на машиночитаемом носителе информации, или в запоминающем устройстве, таком как полупроводниковое запоминающее устройство (ЗУ), ЗУ на жестком магнитном диске или оптическое ЗУ, и используемом для выполнения и применения шагов способа и/или управления этими шагами в соответствии с описанными выше вариантами осуществления изобретения, в частности в процессе работы этого программного продукта / этой программы на компьютере или каком-либо ином устройстве.
Кроме того, предлагается система помощи водителю транспортного средства, обладающая по меньшей мере следующими признаками:
- вышеупомянутое управляющее устройство (блок управления), соответствующее одному из вариантов осуществления изобретения, и
- по меньшей мере один датчик ускорения с коррекцией нулевой точки,
причем по меньшей мере один датчик ускорения и управляющее устройство являются соединяемыми или соединенными друг с другом с возможностью передачи сигналов.
Таким образом, в этой системе помощи водителю может быть благоприятным образом использовано вышеупомянутое управляющее устройство в одном из вариантов осуществления с целью управления по меньшей мере одной функцией помощи водителю, предусмотренной в транспортном средстве.
Краткое описание чертежей
Примеры осуществления изобретения, соответствующие поставленной задаче, показаны на чертежах и более подробно поясняются в приведенном ниже описании. На чертежах показано:
на фиг. 1 - схематическое изображение системы помощи водителю, соответствующей одному из примеров осуществления изобретения и предусмотренной в транспортном средстве,
на фиг. 2 - схема последовательности операций способа управления согласно одному из примеров осуществления изобретения,
на фиг. 3 - график зависимости значения ускорения от времени в одном из примеров осуществления изобретения,
на фиг. 4 - график зависимости регулировочного значения от времени в одном из примеров осуществления изобретения,
на фиг. 5 - график в одном из примеров осуществления изобретения,
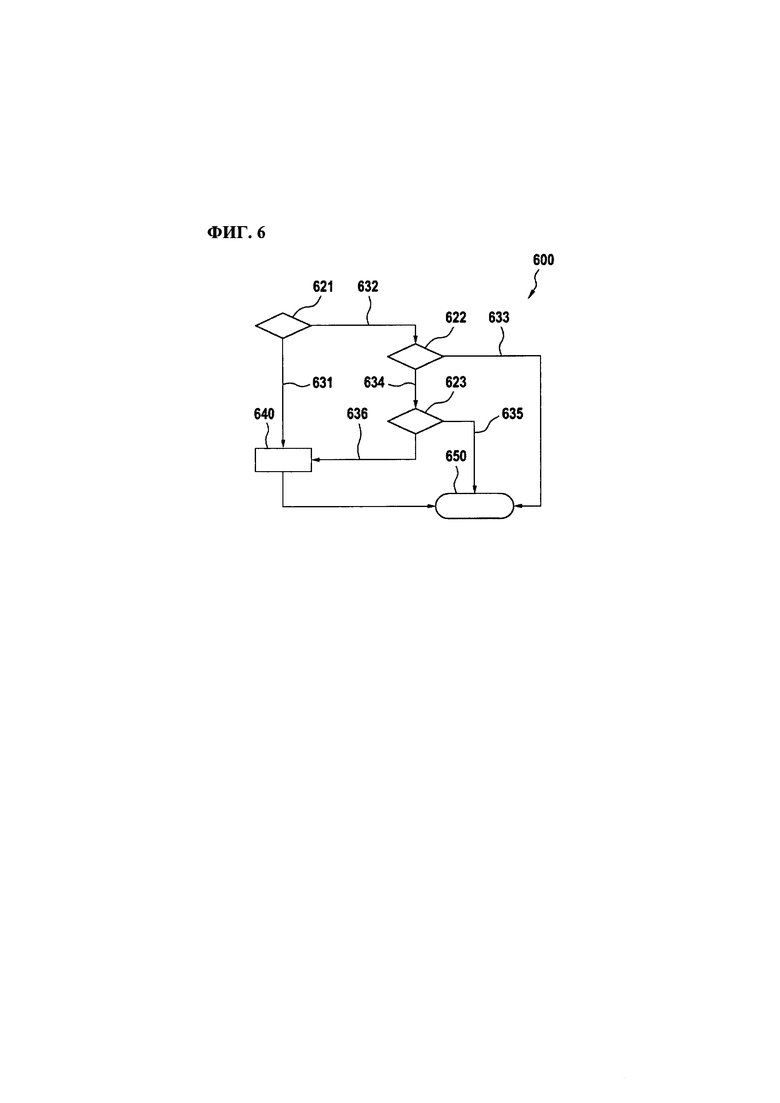
на фиг. 6 - схема последовательности операций процесса управления согласно одному из примеров осуществления изобретения.
Описание примеров осуществления изобретения
В приведенном ниже изложении предпочтительных вариантов осуществления изобретения используются одинаковые или схожие ссылочные обозначения элементов, изображенных на разных чертежах, при этом описание этих элементов не повторяется.
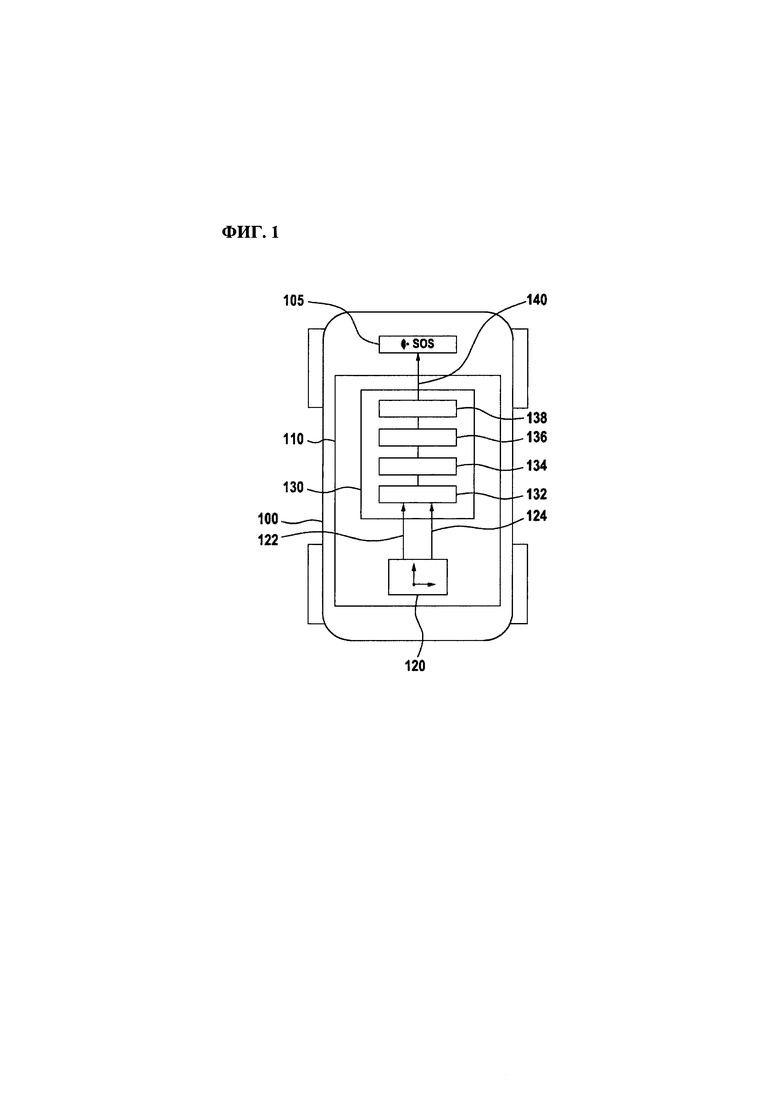
На фиг. 1 представлено схематическое изображение системы 110 помощи водителю, соответствующей одному из примеров осуществления изобретения и предусмотренной в транспортном средстве 100. Транспортное средство 100 представляет собой, например, автомобиль, в частности легковой автомобиль или грузовой автомобиль, либо другое транспортное средство, используемое для перевозки пассажиров и грузов или для выполнения работ. В примере осуществления изобретения, показанном на фиг. 1, транспортное средство 100 содержит функцию 105 помощи водителю и систему 110 помощи водителю. Функция 105 помощи водителю и система 110 помощи водителю соединены друг с другом с возможностью передачи сигналов. Функция 105 помощи водителю предназначена, например, для вызова экстренных оперативных служб.
Как следует из примера осуществления изобретения, показанного на фиг. 1, система 110 помощи водителю содержит датчик 120 ускорения с коррекцией нулевой точки и управляющее устройство 130. Управляющее устройство 130 и датчик 120 ускорения соединены друг с другом с возможностью передачи сигналов.
Датчик 120 ускорения расположен в транспортном средстве 100. Датчик 120 ускорения выполнен с возможностью регистрации ускорения транспортного средства 100 относительно по меньшей мере одной оси. Кроме этого, датчик 120 ускорения выполнен с возможностью генерирования или выдачи сигнала 122 датчика. Сигнал 122 датчика представляет собой значения ускорения, зарегистрированные датчиком 120 ускорения. Датчик 120 ускорения выполнен также, например, с возможностью генерирования сигнала 124 коррекции. Сигнал 124 коррекции представляет собой регулировочные значения для коррекции нулевой точки датчика 120 ускорения. В альтернативном варианте осуществления изобретения сигнал 124 коррекции может также генерироваться управляющим устройством для управления датчиком 120 ускорения.
Управляющее устройство 130 выполнено с возможностью управления функцией 105 помощи водителю в случае опрокидывания транспортного средства 100. Для этого в управляющем устройстве 130 предусмотрена возможность генерирования сигнала 140 опрокидывания с использованием сигнала 122 датчика и сигнала 124 коррекции. Управляющее устройство 130 содержит считывающий блок 132, исполнительный блок 134, блок 136 распознавания и блок 138 генерирования. Считывающий блок 132 выполнен с возможностью считывания сигнала 122 датчика и сигнала 124 коррекции с датчика 120 ускорения или считывания сигнала 122 датчика 120 ускорения и получения в управляющем устройстве сигнала 124 коррекции на основе сигнала 122 ускорения.
Исполнительный блок 134 выполнен с возможностью проведения первого и второго сравнений. В ходе первого сравнения сигнал 122 датчика сравнивается с первым и вторым пороговыми значениями. В ходе второго сравнения сигнал коррекции сравнивается с третьим пороговым значением. Первое и второе пороговые значения представляют собой значения ускорения. При этом первое пороговое значение представляет собой более высокое значение ускорения, чем второе пороговое значение. Кроме того, первое пороговое значение поставлено в соответствие статическому углу опрокидывания транспортного средства 100. Третье пороговое значение представляет собой регулировочное значение для коррекции нулевой точки, поставленное в соответствие или соответствующее разности между первым и вторым пороговыми значениями.
Блок 136 распознавания выполнен с возможностью распознавания наличия опрокидывания транспортного средства 100 в зависимости от результата первого сравнения и результата второго сравнения. Блок 138 генерирования выполнен с возможностью генерирования сигнала 140 опрокидывания для выдачи в функцию 105 помощи водителю. Сигнал 140 опрокидывания отображает установленное, или распознанное, опрокидывание транспортного средства 100. Другими словами, блок 138 генерирования выполнен с возможностью генерирования сигнала 140 опрокидывания, если посредством блока 136 распознавания было установлено наличие опрокидывания. В примере осуществления изобретения, показанном на фиг. 1, сигнал 140 опрокидывания, используемый функцией 105 помощи водителю, или функцией 105 экстренного вызова, может инициировать передачу сигнала вызова экстренных оперативных служб.
На фиг. 2 представлена схема последовательности операций способа 200 управления согласно одному из примеров осуществления изобретения. Способ 200 может быть реализован для управления по меньшей мере одной функцией помощи водителю в случае опрокидывания транспортного средства. При этом способ 200 может быть реализован для управления посредством или с использованием управляющего устройства, показанного на фиг. 1, либо аналогичного управляющего устройства. Кроме того, способ 200 управления может быть реализован в сочетании с системой помощи водителю, показанной на фиг. 1. Таким образом, способ 200 управления может быть реализован в транспортном средстве, оснащенном по меньшей мере одним датчиком ускорения аналогично транспортному средству, показанному на фиг. 1.
На шаге 210 считывания способа 200 управления выполняется считывание сигнала датчика и сигнала коррекции. В альтернативном варианте на шаге 210 выполняется считывание сигнала датчика и определение сигнала коррекции с использованием сигнала датчика. Сигнал датчика представляет собой значения ускорения, зарегистрированные по меньшей мере одним датчиком ускорения, а сигнал коррекции представляет собой регулировочные значения для коррекции нулевой точки по меньшей мере одного датчика ускорения. В одном примере осуществления изобретения на шаге 210 выполняется считывание сигнала датчика, представляющего собой зарегистрированные по меньшей мере одним датчиком ускорения значения ускорения относительно вертикальной оси, поперечной оси и/или продольной оси транспортного средства.
Затем на шаге 220 сравнения выполняется первое сравнение сигнала датчика с первым пороговым значением и со вторым пороговым значением и второе сравнение сигнала коррекции с третьим пороговым значением. При этом первое и второе пороговые значения представляют собой значения ускорения. Первое пороговое значение поставлено в соответствие статическому углу опрокидывания транспортного средства и представляет собой более высокое значение ускорения, чем второе пороговое значение. Третье пороговое значение представляет собой регулировочное значение, поставленное в соответствие разности между первым и вторым пороговыми значениями.
На следующем шаге 230 распознавания выполняется распознавание наличия опрокидывания в зависимости от результата первого сравнения и результата второго сравнения. В одном примере осуществления изобретения распознавание на шаге 230 выполняется, если сигнал датчика переходит вверх через первое пороговое значение, в частности в пределах заданного интервала времени. В качестве дополнения или альтернативы распознавание наличия опрокидывания на шаге 230 выполняется, если сигнал датчика переходит вниз через первое пороговое значение и переходит вверх через второе пороговое значение, а сигнал коррекции переходит вверх через третье пороговое значение. В другом примере осуществления изобретения распознавание наличия опрокидывания на шаге 230 выполняется, если переход сигнала датчика вверх через второе пороговое значение и сигнала коррекции вверх через третье пороговое значение происходит в пределах заданного интервала времени.
На следующем шаге 240 генерирования выполняется генерирование сигнала опрокидывания для выдачи в по меньшей мере одну функцию помощи водителю. При этом сигнал опрокидывания отображает распознанное опрокидывание транспортного средства.
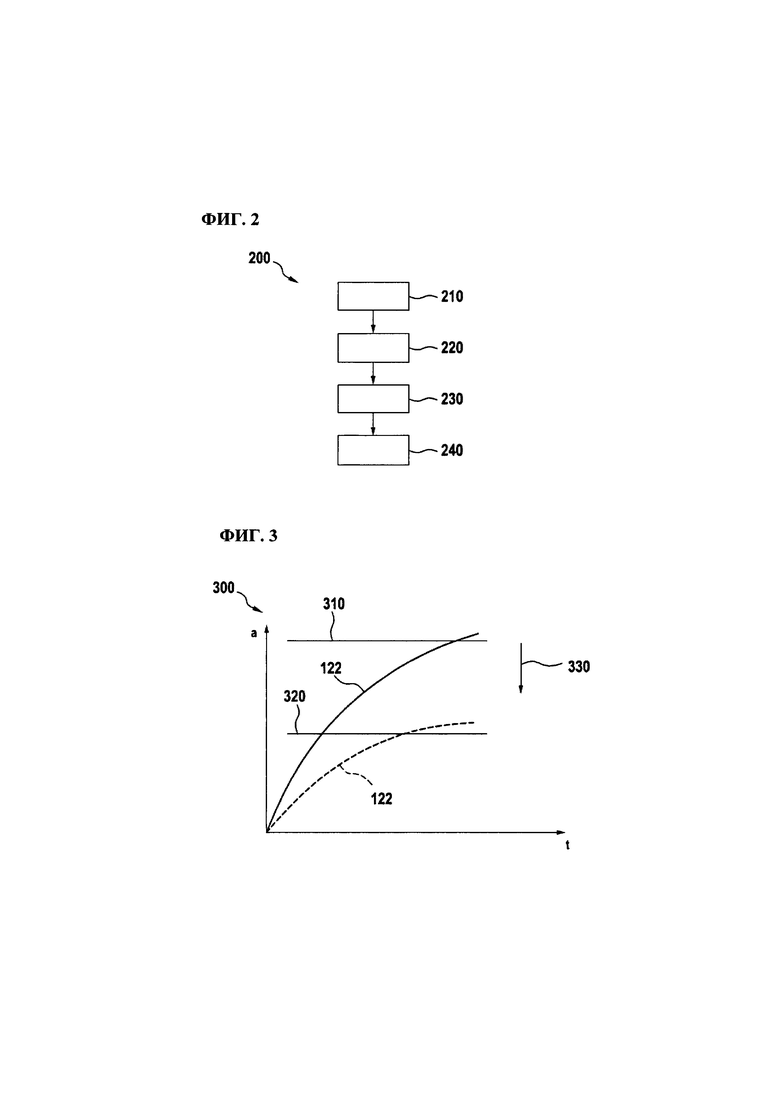
На фиг. 3 представлен график 300 зависимости значения ускорения от времени в одном из примеров осуществления изобретения. На графике 300 по оси абсцисс откладывается время t, а по оси ординат - ускорение а. График 300 следует рассматривать применительно к системе помощи водителю, показанной на фиг. 1, или к какой-либо аналогичной системе. Две линии 122, показанные на графике 300, отображают два возможных варианта сигнала датчика ускорения, представленного на фиг. 1, или какого-либо аналогичного датчика ускорения. Кроме того, на графике 300 показаны первое пороговое значение 310 и второе пороговое значение 320, а также символически отображена потеря 330 в результате коррекции нулевой точки. Второе пороговое значение 320 расположено здесь между первым пороговым значением 310 и осью абсцисс. Первая линия 122 сигнала датчика простирается вверх, переходя как через второе пороговое значение 320, так и через первое пороговое значение 310. Вторая линия 122 сигнала датчика простирается вверх, переходя только через второе пороговое значение 320. Стрелка 330 отображает потерю сигнала между обеими линиями 122 сигнала датчика.
Другими словами, на фиг. 3 представлена иллюстрация влияния, или эффекта, коррекции нулевой точки, или коррекции смещения. Как показано на фиг. 3, вследствие коррекции смещения сигнал 122 датчика со временем проходит через нуль. При этом обычно срабатывает счетчик, выполняющий отсчет продолжительности нахождения сигнала 122 датчика в состоянии положительной или отрицательной полярности. Значение счетчика увеличивается, если сигнал 122 датчика имеет положительную полярность, и уменьшается, если сигнал 122 датчика имеет отрицательную полярность. При переходе счетчика через некоторое пороговое значение происходит, в зависимости от знака сигнала 122 датчика, вычитание из этого сигнала или прибавление к нему некоторого заданного постоянного значения ускорения или регулировочного значения, так что результирующий сигнал стремится к нулю.
До использования сигнала 122 датчика в управляющем устройстве и/или алгоритме в самом датчике ускорения выполняется, например, следующее вычисление:
а_ОС>=0: а_ОС=a_Int - a_Offset;
а_ОС<0: а_ОС=a_Int+a_Offset;
a_Int: Внутренний сигнал датчика до выполнения коррекции смещения
a_Offset: Величина коррекции смещения, определенная в датчике
а_ОС: Сигнал на выходе датчика после выполнения коррекции смещения
Здесь a_Int - сигнал 122 датчика, a aOffset - сигнал 124 коррекции.
Сигнал, полученный после выполнения коррекции смещения (т.е. сигнал датчика, отображаемый второй линией 122 на фиг. 3), уже соответствует, однако, не высокому значению угла поперечного наклона, а физически меньшему углу, например равному 20 градусам вместо первоначальных 40 градусов.
Для определения регулировочных значений в случае сигнала 124 коррекции в управляющем устройстве, принимающем сигнал 122 датчика, приведенное выше вычисление выполняется в инвертированной форме:
а_ОС>=0: а_iOC=а_ОС+a_SGOffset;
а_ОС<0: а_iOC=а_ОС - a_SGOffset;
a_iOC: Сигнал датчика после инвертирования результата коррекции
смещения в управляющем устройстве
a_SGOffset: Величина коррекции смещения, определенная в управляющем устройстве
а_ОС: Сигнал на выходе датчика после выполнения коррекции смещения
Если транспортное средство, показанное на фиг. 1, совершает медленное вращение с достижением высокого значения угла поперечного наклона, например 40 градусов, то первая линия 122, отображающая сигнал датчика, простирается выше первого порогового значения 310, или первого классифицирующего порогового значения, что соответствует высокой устойчивости в критической ситуации. Сигнал, полученный после выполнения коррекции смещения, или сигнал датчика, отображаемый второй линией 122, лежит все же ниже первого порогового значения 310. Поэтому должно быть использовано второе пороговое значение 320, то есть пороговое значение, чувствительное к отклонениям. При быстром вращении транспортного средства это может соответствовать, например, углу поперечного наклона, равному 20 градусам. Использование управляющего устройства, показанного на фиг. 1, позволяет при этом предотвратить ложную активацию вызова экстренных оперативных служб, в данном случае при угле поперечного наклона, равного 20 градусам вместо 40.
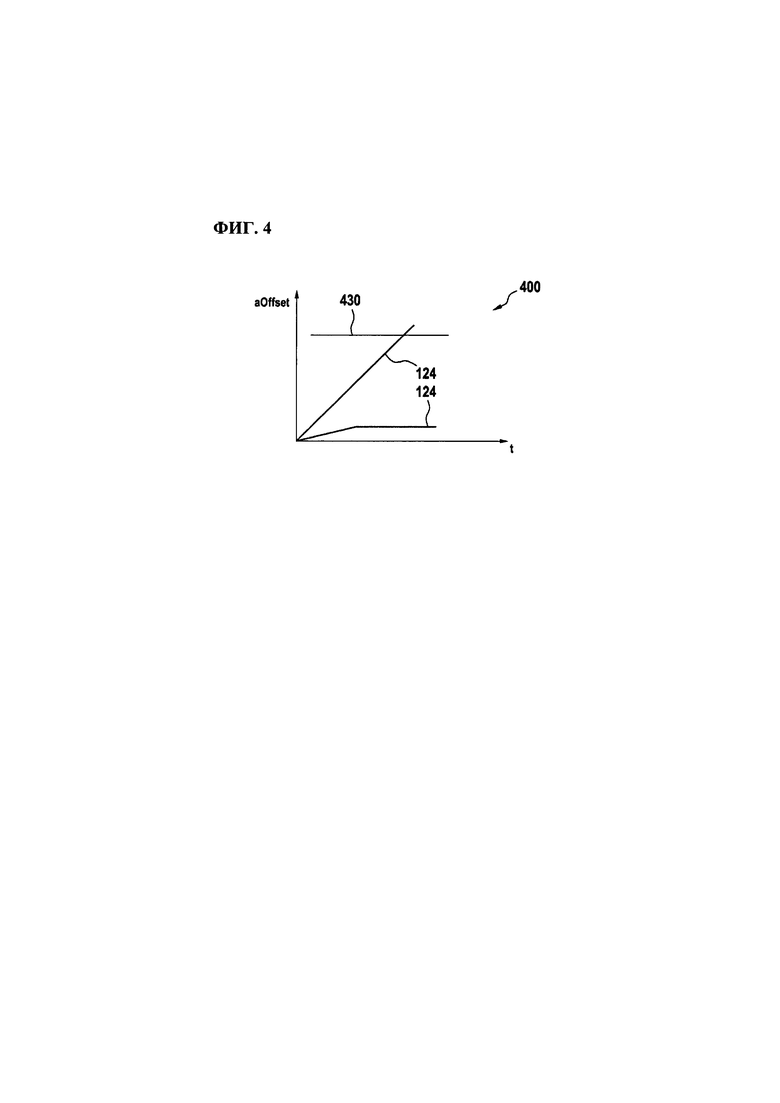
На фиг. 4 представлен график 400 зависимости регулировочного значения от времени в одном из примеров осуществления изобретения. На графике 400 по оси абсцисс откладывается время t, а по оси ординат - регулировочное значение aSGOffset. График 400 следует рассматривать применительно к системе помощи водителю, показанной на фиг. 1, или к какой-либо аналогичной системе. Две линии 124, показанные на графике 400, отображают два возможных варианта сигнала коррекции. Кроме того, на графике 400 показано третье пороговое значение 430. Первая линия 124 сигнала коррекции простирается вверх, переходя через третье пороговое значение 430, и отображает регулировочные значения в случае коррекции нулевой точки при медленном вращении транспортного средства и высоком значении угла поперечного наклона, например 40 градусов. Вторая линия 124 сигнала коррекции простирается ниже третьего порогового значения 430 и отображает регулировочные значения в случае коррекции нулевой точки при медленном вращении транспортного средства и низком значении угла поперечного наклона, например 20 градусов.
Другими словами, на фиг. 4 представлены регулировочные значения в случае коррекции нулевой точки, или значение коррекции смещения. Как показано на фиг. 4, в случае детерминированной коррекции нулевой точки при медленном вращении до 40 градусов обеспечивается достижение высокого значения, или высоких суммарных регулировочных значений, или высокого уровня сигнала 124 коррекции, отображаемого первой линией 124. Таким образом, первая линия сигнала датчика, показанная на фиг. 3, воспроизводится в виде второй линии сигнала датчика в результате выполнения коррекции смещения. Третье пороговое значение 430 обеспечивает возможность использования порогового значения, чувствительного к отклонениям (то есть второго порогового значения, показанного на фиг. 3), только в том случае, если суммарное значение коррекции смещения, или уровень сигнала 124 коррекции, соответствует переходу, или перекрытию, вверх через это третье пороговое значение 430 (то есть пороговое значение, показанное на фиг. 4 и устойчивое к отклонениям).
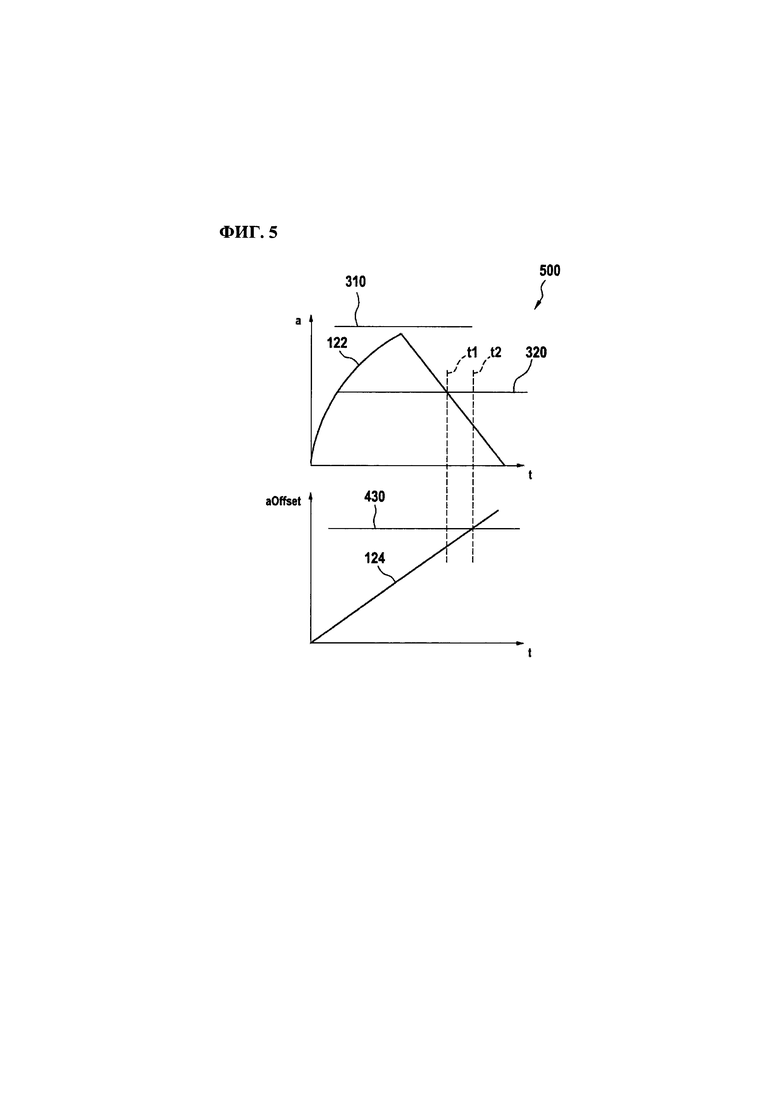
На фиг. 5 представлен график 500 в одном из примеров осуществления изобретения. График 500 следует рассматривать применительно к системе помощи водителю, показанной на фиг. 1, или к какой-либо аналогичной системе. Кроме того, график 500 следует рассматривать в связи с графиками на фиг. 3 и 4. График 500 состоит из двух частей.
В первой части графика по оси абсцисс откладывается время t, а по оси ординат - ускорение а. Первая часть схожа с графиком, показанным на фиг. 3. Здесь показаны первое пороговое значение 310 и второе пороговое значение 320, а также возможный сигнал 122 датчика. Линия сигнала 122 датчика на фиг. 5 поднимается сначала от оси абсцисс до уровня, лежащего выше второго порогового значения 320 и вблизи первого порогового значения 310, после чего опять опускается ниже второго порогового значения, доходя до оси абсцисс.
Во второй части графика по оси абсцисс откладывается время t, а по оси ординат - регулировочное значение aSGOffset. Вторая часть графика схожа с графиком, показанным на фиг. 4. Здесь показаны третье пороговое значение 430 и возможный сигнал 124 коррекции. Линия сигнала 124 коррекции на фиг. 5 поднимается от оси абсцисс, переходя вверх через уровень третьего порогового значения 430.
Кроме того, на графике показаны линии, проходящие через обе его части параллельно оси ординат и соответствующие первому моменту t1 времени и второму моменту t2 времени. В первый момент t1 времени линия сигнала 122 датчика переходит вниз через уровень второго порогового значения 320. К этому первому моменту t1 еще не достигается третье пороговое значение 430. Во второй момент t2 времени линия сигнала 124 коррекции переходит вверх через уровень третьего порогового значения 430. К этому второму моменту t2 времени уже имел место переход вниз через второе пороговое значение 320. Второй момент t2 времени хронологически следует после первого момента t1 времени.
Другими словами, при быстром вращении транспортного средства, например до уровня ниже первого порогового значения 310, например при 40 градусах, с заключительной остановкой при сигнале 122 датчика на уровне выше порогового значения, чувствительного к отклонениям (то есть второго порогового значения 320), имеет место ситуация, показанная на фиг. 5. Суммарное значение коррекции смещения aSGOffset, или уровень сигнала 124 коррекции, достигает третьего порогового значения 430. Поскольку, однако, вследствие коррекции нулевой точки сигнал 122 датчика стремится к нулю, ко второму моменту t2 времени при выполнении условия перехода вверх через третье пороговое значение 430 больше не выполняется условие перехода вверх через второе пороговое значение 320. Зазор между первым пороговым значением 310 и вторым пороговым значением 320 соответствует, например, третьему пороговому значению 430. Указанные выше условия выполняются одновременно или в пределах интервала времени, определенного как допустимый, лишь в том случае, если сигнал 122 датчика тоже переходит вверх через первое пороговое значение 310. Это позволяет, в частности, предотвратить ложную активацию вызова экстренных оперативных служб.
На фиг. 6 представлена схема последовательности операций процесса 600 управления согласно одному из примеров осуществления изобретения. Процесс 600 связан со способом управления, представленным на фиг. 2, или с аналогичным способом.
На шаге 621 проверяется, лежит ли уровень сигнала датчика, или значение ускорения, выше первого порогового значения. Если это так, то процесс 600 продолжается по пути 631 вплоть до активации вызова экстренных оперативных служб на шаге 640, после чего процесс 600 завершается на шаге 650. Если уровень сигнала датчика не лежит выше первого порогового значения, то процесс 600 продолжается по пути 632 до шага 622.
На шаге 622, проверяется, лежит ли уровень сигнала датчика выше второго порогового значения. Если это не так, то процесс 600 продолжается по пути 633 и завершается на шаге 650. Если уровень сигнала датчика лежит выше второго порогового значения, то процесс 600 продолжается по пути 634 до шага 623.
На шаге 623 определяется, лежит ли уровень сигнала коррекции выше третьего порогового значения. Если уровень сигнала коррекции не лежит выше третьего порогового значения, то процесс 600 продолжается по пути 635 и завершается на шаге 650. Если уровень сигнала коррекции лежит выше третьего порогового значения, то процесс 600 продолжается по пути 636 до шага 640 и затем до шага 650.
Другими словами, процесс 600 может быть разделен на два основных пути. Путь, характеризующийся устойчивостью к отклонениям, позволяет выполнить непосредственную активацию вызова экстренных оперативных служб после первого шага 621, в то время как на пути, характеризующемся чувствительностью к отклонениям, активация вызова экстренных оперативных служб выполняется только в том случае, если дополнительно имеет место переход вверх через третье пороговое значение сигнала коррекции, или суммарного значения коррекции смещения aSGOffset.
Примеры осуществления, а также основные принципы и возможности применения настоящего изобретения еще раз обобщенно представлены и/или кратко поясняются ниже со ссылкой на вышеупомянутые чертежи.
Возможности применения заключаются, например, в распознавании статической ситуации "rollover" / "pitchover" (англ., "Вращение в поперечной плоскости" / "Вращение в продольной плоскости"), или в распознавании опрокидывания транспортного средства 100. Изобретение в представленных примерах осуществления может найти применение для распознавания медленного вращения с использованием по меньшей мере одного датчика 120 ускорения с коррекцией смещения, или коррекцией нулевой точки. В частности, это может быть также реализовано в случае вращения транспортного средства 100 вокруг поперечной оси на соответствующем испытательном стенде вплоть до распознавания вышеупомянутой ситуации "pitchover". Возможные комбинации датчиков могут включать, например, только aZ для вращения вокруг продольной или поперечной оси транспортного средства 100, комбинацию aY/aZ для вращения вокруг продольной оси или комбинацию aX/aZ для вращения вокруг поперечной оси.
Изобретение в представленных примерах осуществления позволяет предотвратить ложную активацию вызова экстренных оперативных служб в случае быстрого вращения транспортного средства 100 без достижения статического угла опрокидывания. Изобретение в представленных примерах осуществления позволяет надежно распознать опрокидывание транспортного средства 100 в случае его медленного вращения с достижением статического угла опрокидывания.
В связи с законодательными положениями, касающимися автоматической активации вызова экстренных оперативных служб после опрокидывания транспортного средства, может быть выполнено сертификационное испытание, предусматривающее медленное вращение транспортного средства 100 вокруг своей продольной оси. Скорость вращения может быть малой в той мере, в какой может выполняться заметная коррекция нулевой точки обычных датчиков 120 ускорения, например в направлениях aY и aZ, что может приводить к потере полезного сигнала. Кроме того, скорость вращения при этом может быть настолько малой, что исключается возможность использования обычных датчиков угловой скорости рыскания для распознавания опрокидывания. Такое медленное вращение можно было бы зафиксировать путем распознавания вектора гравитации в направлениях aY и aZ. Для этого требуются так называемые датчики ускорения с устойчивостью к смещению, характеризующиеся весьма незначительным дрейфом, или смещением, на протяжении своего срока службы и под воздействием температуры. Однако общеупотребительными и экономически выгодными являются датчики 120 ускорения с медленной коррекцией нулевой точки, или коррекцией смещения. Изобретение в представленных примерах осуществления позволяет отличить и без оценки фактического полезного сигнала, или сигнала датчика, 122 медленное вращение с большим углом поперечного наклона от реального вращения, при котором может быть достигнут лишь малый подобный угол. Это позволяет предотвратить частое ложноположительное срабатывание функции 105 вызова экстренных оперативных служб. Благодаря этому медленное опрокидывание может быть зафиксировано, без каких-либо компромиссов в отношении надежности, обычными датчиками, предусмотренными для воздушных подушек безопасности, что является важным с учетом возможного принятия соответствующих законодательных положений. Изобретение в представленных примерах осуществления позволяет снизить вероятность ложноположительного срабатывания функции 105 вызова экстренных оперативных служб и тем самым повысить надежность распознавания опрокидывания.
Союз "и/или", используемый в каком-либо из примеров осуществления настоящего изобретения применительно к связи между каким-либо первым отличительным признаком и каким-либо вторым отличительным признаком, следует интерпретировать в том смысле, что изобретение в одном варианте осуществления содержит как первый, так и второй признак, а в другом варианте осуществления содержит либо только первый, либо только второй признак.
Изобретение относится к способу и устройству для управления по меньшей мере одной функцией помощи водителю в случае опрокидывания транспортного средства и системе помощи водителю. Способ управления по меньшей мере одной функцией помощи водителю в случае опрокидывания транспортного средства, оснащенного по меньшей мере одним датчиком ускорения с коррекцией нулевой точки включает следующие шаги считывание сигнала датчика и сигнала коррекции или считывание сигнала датчика и определение сигнала коррекции с использованием сигнала датчика, выполнение первого сравнения сигнала датчика с первым пороговым значением и со вторым пороговым значением и второго сравнения сигнала коррекции с третьим пороговым значением, распознавание наличия опрокидывания в зависимости от результата первого сравнения и результата второго сравнения и генерирование сигнала опрокидывания для выдачи в по меньшей мере одну функцию помощи водителю, если на шаге распознавания было установлено наличие опрокидывания. Сигнал датчика представляет собой значения ускорения, зарегистрированные по меньшей мере одним датчиком ускорения, а сигнал коррекции представляет собой регулировочные значения для коррекции нулевой точки по меньшей мере одного датчика ускорения. Первое пороговое значение и второе пороговое значение представляют собой значения ускорения, причем первое пороговое значение поставлено в соответствие статическому углу опрокидывания транспортного средства и представляет собой более высокое значение ускорения, чем второе пороговое значение, а третье пороговое значение представляет собой регулировочное значение, поставленное в соответствие разности между первым пороговым значением и вторым пороговым значением. Достигается повышение безопасности управления транспортным средством. 4 н. и 5 з.п. ф-лы, 6 ил.
1. Способ (200) управления по меньшей мере одной функцией (105) помощи водителю в случае опрокидывания транспортного средства (100), оснащенного по меньшей мере одним датчиком (120) ускорения с коррекцией нулевой точки, включающий следующие шаги:
- считывание (210) сигнала (122) датчика и сигнала (124) коррекции или считывание (210) сигнала (122) датчика и определение сигнала (124) коррекции с использованием сигнала (122) датчика, причем сигнал (122) датчика представляет собой значения ускорения, зарегистрированные по меньшей мере одним датчиком (120) ускорения, а сигнал (124) коррекции представляет собой регулировочные значения для коррекции нулевой точки по меньшей мере одного датчика (120) ускорения,
- выполнение (220) первого сравнения сигнала (122) датчика с первым пороговым значением (310) и со вторым пороговым значением (320) и второго сравнения сигнала (124) коррекции с третьим пороговым значением (430), причем первое пороговое значение (310) и второе пороговое значение (320) представляют собой значения ускорения, причем первое пороговое значение (310) поставлено в соответствие статическому углу опрокидывания транспортного средства (100) и представляет собой более высокое значение ускорения, чем второе пороговое значение (320), а третье пороговое значение (430) представляет собой регулировочное значение, поставленное в соответствие разности между первым пороговым значением (310) и вторым пороговым значением (320),
- распознавание (230) наличия опрокидывания в зависимости от результата первого сравнения и результата второго сравнения,
- генерирование (240) сигнала (140) опрокидывания для выдачи в по меньшей мере одну функцию (105) помощи водителю, если на шаге распознавания (230) было установлено наличие опрокидывания.
2. Способ (200) по п. 1, в котором наличие опрокидывания устанавливается на шаге (230) распознавания, если сигнал (122) датчика переходит вверх через первое пороговое значение (310).
3. Способ (200) по одному из предыдущих пунктов, в котором наличие опрокидывания устанавливается на шаге (230) распознавания, если сигнал (122) датчика переходит вниз через первое пороговое значение (310) и переходит вверх через второе пороговое значение (320), а сигнал (124) коррекции переходит вверх через третье пороговое значение (430).
4. Способ (200) по п. 3, в котором наличие опрокидывания устанавливается на шаге (230) распознавания, если переход сигнала (122) датчика вверх через второе пороговое значение (320) и переход сигнала коррекции (124) вверх через третье пороговое значение (430) происходит в пределах заданного интервала времени.
5. Способ (200) по одному из предыдущих пунктов, в котором на шаге (210) считывания выполняется считывание сигнала (122) датчика, представляющего собой ускорения относительно вертикальной оси, поперечной оси и/или продольной оси транспортного средства (100), зарегистрированные по меньшей мере одним датчиком (120) ускорения значения.
6. Способ (200) по одному из предыдущих пунктов, в котором на шаге (240) генерирования генерируется сигнал (140) опрокидывания для выдачи в функцию (105) вызова экстренных оперативных служб, причем сигнал (140) опрокидывания, используемый функцией (105), может инициировать передачу вызова экстренных оперативных служб.
7. Управляющее устройство (130), выполненное с возможностью осуществления шагов способа (200) по одному из предыдущих пунктов в соответствующих блоках (132, 134, 136, 138).
8. Система (110) помощи водителю транспортного средства (100), обладающая по меньшей мере следующими признаками:
- управляющее устройство (130) по п. 7 и
- по меньшей мере один датчик (120) ускорения с коррекцией нулевой точки,
причем по меньшей мере один датчик (120) ускорения и управляющее устройство (130) являются соединяемыми или соединенными друг с другом с возможностью передачи сигналов.
9. Машиночитаемый носитель данных, содержащий компьютерную программу, при выполнении которой осуществляется способ (200) по одному из пп. 1-6.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

