ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящее раскрытие испрашивает приоритет
предварительной заявки США №63/012,440, поданной 20 апреля 2020 г. и озаглавленной «Усовершенствованная система рулевого управления для снегоходов», которая полностью включена в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] Аспекты этого раскрытия, в целом, относятся к управлению рулевым управлением снегоходов.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0003] Система рулевого управления типичного снегохода обеспечивает небольшую обратную связь с пользователем/оператором при выполнении поворота.
Это отсутствие обратной связи может быть истолковано пользователем/оператором как отсутствие управления, что может привести к опасным условиям, таким как непреднамеренный резкий поворот, отклонение и столкновения.
[0004] Системы рулевого управления с усилителем известны из предшествующего уровня техники и часто используются на снегоходах, и часто используют определенную скорость снегохода для определения уровня демпфирования и применения демпфирования к узлу рулевого управления снегохода для обеспечения устойчивости узла рулевого управления.
Обычно, механический демпфер устанавливается на узле рулевого управления для обеспечения большей устойчивости узла рулевого управления независимо от скорости транспортного средства.
[0005] Другие системы рулевого управления с усилителем, используемые на снегоходах, могут вычислять и применять к узлу рулевого управления уровень демпфирования, использующий ускорения транспортного средства, такие как ускорения в любом направлении, включая направление х, направление у и направление z.
Опять же, механический демпфер, установленный на узле рулевого управления, имеет постоянный эффект демпфирования независимо от ускорения снегохода.
[0006] Однако, современные системы рулевого управления с усилителем могут по-прежнему испытывать нестабильность при использовании в снегоходах.
В частности, когда пользователь/оператор управляет снегоходом по пересеченной местности, пользователь/оператор может повернуть руль или неожиданно выпустить из рук дроссель на руле.
Точно так же пользователь/оператор может принудительно задействовать тормоз во время работы на неожиданно пересеченной местности.
Во время этих событий, может возникнуть нестабильность руля или других элементов рулевого управления, которая ощущается пользователем/оператором.
По существу, остается потребность в способе управления, который обеспечивает устойчивость руля или других элементов рулевого управления снегохода во время резкого или неожиданного изменения ускорения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Настоящее раскрытие раскрывает систему управления движением для снегохода.
Снегоход включает в себя кузов транспортного средства, двигатель, расположенный в кузове транспортного средства, гусеничное приводное устройство, соединенное с двигателем, при этом гусеничное приводное устройство включает гусеничную ленту, адаптированную для размещения на местности, по меньшей мере, один элемент зацепления с землей, расположенный на нижней стороне кузова транспортного средства, и адаптированный для размещения на местности.
[0008] Система управления движением включает в себя систему рулевого управления, имеющую управляемый пользователем элемент рулевого управления, такой как ручка, для регулировки угла, по меньшей мере, одного элемента, зацепления с землей, относительно продольной оси снегохода.
Система управления движением также включает в себя дроссель, установленный на управляемом пользователем элементе рулевого управления и соединенный с двигателем, для регулировки работы двигателя, для приведения в действие гусеничного приводного устройства для вращения гусеничной ленты для движения снегохода по местности.
Система управления движением также включает в себя множество датчиков для генерирования данных о состоянии местности на местности и для генерирования рабочих данных снегохода, при этом указанное множество датчиков содержит датчик крутящего момента для генерирования части рабочих данных снегохода и, по меньшей мере, один дополнительный датчик.
Система управления движением включает в себя электроприводное устройство, соединенное с системой рулевого управления, для приложения крутящего момента к системе рулевого управления.
[0009] Система управления движением также включает в себя, по меньшей мере, один контроллер, связанный с электроприводным устройством и датчиками.
По меньшей мере, один контроллер выбирает характер состояния местности, используя генерированные данные состояния местности и генерированные рабочие данные, при этом характер состояния местности выбирается из характера обледенелой лыжной трассы, характера заснеженной лыжной трассы и характера запорошенной отсутствующей лыжной трассы.
По меньшей мере, один контроллер также определяет крутящий момент для приложения к системе рулевого управления в зависимости от угла и скорости поворота управляемого пользователем элемента рулевого управления, посредством использования выбранного характера состояния местности и генерированных рабочих данных.
По меньшей мере, один контроллер также управляет электроприводным устройством для приложения крутящего момента к системе рулевого управления для обеспечения улучшенного управления рулевым управлением снегохода в зависимости от угла и скорости поворота управляемого пользователем элемента рулевого управления, при этом крутящий момент прилагается только электропроводным устройством.
[0010] В некоторых вариантах осуществления, по меньшей мере, один контроллер также выполнен с возможностью изменения относительной степени приложенного первого крутящего момента на основе определенного состояния снегохода на подъеме или спуске на местности во время работы.
[0011] В некоторых вариантах осуществления, по меньшей мере, один контроллер также выполнен с возможностью обеспечения функции самоцентрирования управляемого пользователем элемента управления во время определенных рабочих условий, таких как шаг, ускорение, запрос крутящего момента двигателя, переключение тормоза, неожиданное отпускание дроссельной заслонки и т.п.для обеспечения демпфирования или повышенного сопротивления рулевому управлению в таких случаях, что может снизить утомляемость водителя, улучшить прохождение поворотов и/или обеспечить улучшенный контроль за переносом веса для пользователей, особенно начинающих.
[0012] Настоящее раскрытие также раскрывает снегоход, имеющий усовершенствованную систему управления водителем, как описано выше.
Еще дополнительно, настоящее раскрытие также раскрывает связанный способ улучшения управления рулевым управлением снегохода, который включает в себя систему управления движением, как описано выше.
[0013] Настоящее раскрытие обеспечивает улучшенное рулевое управление снегоходов, которое функционирует для ускорения кривой обучения навыкам для начинающих, управляющих снегоходом, особенно в суровых условиях местности, таких как условия на обледенелой местности или в условиях местности с рыхлым снегом.
Настоящее раскрытие также снижает физические усилия, необходимые для выполнения различных маневров на снегоходе, в зависимости от условий местности и условий эксплуатации, поскольку предусмотренный здесь усилитель рулевого управления будет стимулировать рулевое управление в правильном направлении для достижения и поддержания цели баланса.
Еще дополнительно, настоящее раскрытие помогает пользователю устранить дисбаланс во время маневра поворота, позволяя пользователю инициировать перемещение тела для инициирования кренения салазок, в то же время, позволяя лучше держаться за руль по сравнению с обычно более легким рулевым управлением.
Настоящее раскрытие также обеспечивает демпфирование или увеличивает сопротивление рулевому управлению, когда вес водителя переносится на заднюю часть при движении по крутым склонам или при резком ускорении, что разгружает элементы зацепления с землей и делает усилие рулевого управления более легким для пользователя, и минимальное влияние рулевого управления на элементы зацепления с землей.
Настоящее раскрытие также обеспечивает поддержку рулевого управления или снижает сопротивление рулевому управлению, когда вес водителя переносится на переднюю часть при движении на крутых спусках или при резком торможении, что нагружает элементы зацепления с землей и делает усилие рулевого управления более тяжелым для пользователя и влияние рулевого управления на устранение эффекта вспашки элементов зацепления с землей или носовой части снегохода в условиях глубокого снега, что затрудняет управление снегоходом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0014] Фиг. 1 представляет собой вид в перспективе снегохода, который может включать систему управления движением по настоящему изобретению.
[0015] Фиг. 2 представляет собой вид в перспективе узла рулевого управления снегохода, который может включать систему управления движением по настоящему изобретению.
[0016] Фиг. 3 представляет собой принципиальную схему, иллюстрирующую компоненты снегохода, имеющего улучшенное рулевое управление посредством системы управления движением, соединенной с системой рулевого управления.
[0017] Фиг. 4 представляет собой принципиальную схему, иллюстрирующую контроллер, который может быть включен в снегоход по фигурам 1-3.
[0018] Фиг. 5 представляет собой вид в перспективе примера осуществления системы управления движением, которая может быть связана с системой рулевого управления снегохода для обеспечения улучшенного рулевого управления для снегохода.
[0019] Фиг. 6 представляет собой блок-схему способа реализации активного демпфера в снегоходе по фигурам 1-3.
[0020] Фиг. 7 представляет собой схему архитектуры обработки для реализации активного демпфера в снегоходе по фигурам 1-3.
[0021] Фиг. 8 представляет собой блок-схему алгоритма выбора режима для определения предварительного характера состояния местности для множества критериев для использования при определении характера состояния местности на этапе 254 по фиг. 6.
ПОДРОБНОЕ ОПИСАНИЕ
[0022] Ссылаясь теперь к фигурам 1-3, снегоход 10 в соответствии с примером осуществления, в целом, включает в себя кузов 12 транспортного средства, по меньшей мере, один элемент 14 зацепления с землей, расположенный на нижней стороне кузова 12 транспортного средства (т.е., по меньшей мере, одни салазки, показанные как левая и правая передние салазки 14, расположенные на нижней передней стороне кузова 12 транспортного средства на Фиг. 1), адаптированные для размещения на местности, двигатель 16, расположенный в моторном отсеке 18 кузова 12 транспортного средства, и гусеничное приводное устройство 20, приводимое в движение двигателем 16 (см. фиг. 2).
Гусеничное приводное устройство 20 имеет гусеничную ленту 22, также адаптированную для размещения на местности.
В некоторых вариантах осуществления, включая проиллюстрированные варианты осуществления, гусеничная лента 22 намотана вокруг множества колес/звездочек 24.
[0023] Снегоход 10 также включает в себя систему 30 рулевого управления.
Как лучше всего показано на фиг.2, система 30 рулевого управления включает в себя рулевую колонку 32, соединенную с рулевой рейкой 34 через вал 35 рулевого управления, который соединен с одним или несколькими элементами 14 зацепления с землей.
Также предполагается, что система 30 рулевого управления может содержать любую механическую связь между рулевой колонкой 32 и элементами 14 зацепления с землей, как известно обычному специалисту в данной области техники, включая, но не ограничиваясь связями.
Обычно элементы 14 зацепления с землей соединены с рулевыми тягами 36.
Система 30 рулевого управления также имеет управляемый пользователем элемент 38 рулевого управления, показанный как ручка 38 (т.е. руль), как иллюстрировано на фиг. 2, или рулевое колесо, или устройство типа джойстика, или другое управляемое пользователем устройство рулевого управления (не показано).
Перемещение управляемого пользователем элемента 38 рулевого управления, такого как руль 38, как показано на фиг. 2, или рулевого колеса, или устройства типа джойстика, или другого управляемого пользователем рулевого устройства (не показано), вызывает перемещение рулевого вала 35 и рулевых тяг 36, которые поворачивают элементы 14 зацепления с землей, для поворота снегохода 10 в желаемом направлении.
Дополнительно предполагается, что система 30 рулевого управления может быть другим управляемым пользователем элементом рулевого управления, который работает, как известно специалисту в данной области техники.
[0024] Снегоход 10 также включает сиденье 40, соединенное с кузовом транспортного средства, которое обычно расположено позади системы 30 рулевого управления и, как правило, над гусеничным приводным устройством 20 относительно местности.
Кроме того, снегоход может иметь один или несколько амортизаторов 42, соединенных с элементами 14 зацепления с землей.
[0025] Система 30 рулевого управления также имеет дроссель 114, установленный на ручке 38 и соединенный с двигателем 16.
Водитель/пользователь может взаимодействовать с дросселем 114 для регулировки работы двигателя 16 для приведения в действие гусеничного приводного устройства 20 для вращения гусеничных лент 22 для движения снегохода 10 по местности.
Скорость снегохода 10 может соответствовать скорости вращения гусеничной ленты 22 для движения снегохода 10 по местности.
Чем больше поворот дросселя 114, тем быстрее вращаются гусеничные ленты 22 и, следовательно, тем быстрее снегоход 10 движется по местности.
Система 30 рулевого управления также имеет тормоз 44, установленный на ручке 38 для замедления снегохода во время работы.
[0026] В некоторых обычных снегоходах, система 30 рулевого управления дополнительно включает в себя систему рулевого управления с усилителем и, в частности, систему рулевого управления с электронным усилителем («EPS»), которая предназначена для помощи пользователю/оператору снегохода в управлении или повороте элементов зацепления с землей снегохода во время использования.
Однако эта система рулевого управления с усилителем обеспечивает небольшую обратную связь рулевого управления или ее отсутствие для пользователя/оператора о силах обмена между типичным снегоходом и его окружением, например, во время поворота.
В частности, пользователь/оператор снегохода обычно мало или совсем не получает резистивную обратную связь рулевого управления от нагрузки, приложенной к типичному снегоходу условиями окружающей среды (например, снег, лед, склоны, уклоны, пересеченная местность и т.п.) и незначительно или совсем не получает обратную связь рулевого управления от нагрузки, которую типичный снегоход прикладывает к окружающей его среде.
Обратная связь рулевого управления, обеспечиваемая пользователю/оператору типичного снегохода, не увеличивается значительно с увеличением скорости.
[0027] Неопытный пользователь/оператор, который может быть привыкшим к ощущениям от вождения и динамике рулевого управления автомобиля, может связать отсутствие обратной связи и легкость рулевого управления с отсутствием контроля.
Ощущение отсутствия контроля может привести к тому, что пользователь/оператор будет выполнять опасные маневры, такие как чрезмерные действия рулевого управления на высоких скоростях, которые потенциально могут выбросить ничего не подозревающего пользователя/оператора или пассажира из снегохода.
Кроме того, легкость, с которой типичный снегоход поворачивается, может позволить элементам окружающей среды, таким как снег или неровная местность, заставить снегоход постоянно отклоняться от курса.
В отличие от автомобиля, нагрузки между типичным снегоходом и окружающей средой часто являются недостаточными для обеспечения самоцентрирования снегохода.
Таким образом, пользователю/оператору типичного снегохода может потребоваться выполнить несколько корректировок рулевого управления, пока снегоход не придет к поддержанию определенного курса.
[0028] Для преодоления этих и других проблем, в одном примере осуществления, схематично показанном на фиг. 3, снегоход 10 может включать в себя систему 102 управления движением, соединенную с системой 30 рулевого управления снегохода 10 для обеспечения улучшенного рулевого управления.
Система 102 управления движением может включать в себя электроприводное устройство (EAD) 124 и электронный блок 126 управления (ECU), связанный с ним.
EAD 12 4 может быть выполнено с возможностью приложения крутящего момента к системе 30 рулевого управления снегохода 10 на основе электрических сигналов, полученных от ECU 126.
[0029] Во время работы снегохода 10, система 102 управления движением может быть выполнена с возможностью реализации активного демпфера, регулируемого на основе различных рабочих параметров, контролируемых ECU 12 6.
В частности, ECU 126 может быть выполнен с возможностью управления EAD 124 для приложения дополнительного или уменьшенного сопротивления к системе 30 рулевого управления снегохода 10 на основе контролируемых параметров.
Таким образом, пользователю/оператору может потребоваться увеличить или уменьшить усилие рулевого управления для поворота элементов 14 зацепления с землей снегохода 10, что может лучше информировать пользователя/оператора о потенциальных усилиях, которые могут создаваться снегоходом 10 в ответ на действие рулевого управления.
Таким образом, ощущения от вождения снегохода 10 будут ближе к ощущениям от вождения автомобиля, что может быть более интуитивным и удобным для пользователя/оператора и, соответственно, может привести к большей уверенности, лучшему управлению рулевым управлением и предотвращению потенциально опасных маневров.
Еще дополнительно, это также может снизить утомляемость пользователя/оператора, связанную с управлением транспортным средством при этих рабочих параметрах снегохода 10.
[0030] Как описано выше, система 102 управления движением может быть связана с системой 30 рулевого управления и, в частности, с системой 30 рулевого управления снегохода 10, и может быть выполнена с возможностью обеспечения улучшенного рулевого управления снегоходом 10.
Система 102 управления движением, как схематично показано на фиг.З, может включать в себя EAD 124, ECU 126, навигационную систему 128, множество датчиков 130 и человеко-машинный интерфейс (HMI) 132.
[0031] EAD 124 может быть соединен с рулевой колонкой 32 и может функционировать как система рулевого управления с электроусилителем (EPS) для снегохода 10 (и показана как система EPS на фиг.3).
С этой целью, EAD 124 может включать в себя двигатель 125, такой как электродвигатель, выполненный с возможностью приложения крутящего момента к рулевой колонке 32 по часовой стрелке и против часовой стрелки, например, на основе управляющих сигналов, полученных от ECU 12 6.
Например, EAD 124 может включать в себя один или несколько рычагов, соединенных с рулевой колонкой 32 и вращаемых двигателем 125, или может включать в себя втулку, вращаемую двигателем 125, через которую продолжается рулевая колонка 32, и с которой она соединена.
[0032] ECU 126 (также называемый в данном документе «контроллер») может быть выполнен с возможностью связи с другими компонентами снегохода 10 или, более конкретно, с системой 102 управления движением, напрямую и/или через один или несколько проводных или беспроводные сетей, таких как вычислительная сеть управления (CAN).
Во время работы снегохода 10, ECU 126 может быть выполнен с возможностью управления EAD 124 на основе данных состояния местности и рабочих данных, получаемых от навигационной системы 128, множества датчиков 130 и/или HMI 132.
[0033] Навигационная система 128 может включать в себя модуль 134 глобальной системы позиционирования (GPS) и/или модуль 136 инерциальной навигационной системы (INS).
Каждый модуль 134 GPS и модуль 136 INS могут быть выполнены с возможностью определения и передачи в ECU 126 данных, указывающих текущее положение, направление и скорость снегохода 10.
[0034] Модуль 134 GPS может быть выполнен с возможностью генерирования рабочих данных в форме географических данных, указывающих текущее положение снегохода 10, посредством связи с одним или несколькими спутниками 138 на орбите через антенну 137 GPS модуля 134 GPS.
Каждое положение, генерируемое модулем 134 GPS, может включать в себя координаты долготы и широты снегохода 10 в данный момент времени.
Модуль 134 GPS или ECU 126 может быть дополнительно выполнен с возможностью генерирования рабочих данных в форме географических данных, указывающих текущий курс снегохода 10, путем сравнения двух или более положений, определенных модулем 134 GPS в течение установленного периода времени относительно направления движения.
Модуль 134 GPS или ECU 126 также может быть выполнен с возможностью генерирования рабочих данных, указывающих скорость (или текущую скорость) снегохода 10, путем сравнения двух или более положений, определенных модулем 134 GPS за установленный период времени относительно времени.
Более того, модуль 134 GPS может быть предварительно загружен данными, предоставляющими информацию об известных трассах снегохода, так что ECU 126 может использовать географические данные, полученные от модуля 134 GPS, и определять, движется ли снегоход 10 по одной из множества известных трасс, и использовать полученную информацию как один из множества взвешенных факторов для выбора характера состояния местности, как будет более подробно описано ниже.
[0035] Модуль 136 INS может включать в себя акселерометр, гироскоп и/или магнитометр, выполненный с возможностью вычисления и генерирования рабочих данных, указывающих текущее положение, ориентацию (например, курс) и скорость снегохода 10.
В частности, на основе известного географического положения снегохода 10 в данный момент времени, которое может быть определено с использованием модуля 134 GPS, как описано выше, и на основе известной ориентации и скорости снегохода 10, которые могут быть определены с использованием генерированных данных посредством модуля 134 GPS, как описано выше, и/или данных, генерированных модулем 136 INS, модуль 136 INS или ECU 126 может быть выполнен с возможностью определения обновленного географического положения, курса и темпа (скорости) снегохода 10 на основе данных, генерируемых только модулем 136 INS.
Другими словами, модуль 136 INS или ECU 126 может быть выполнен с возможностью определения того, как снегоход 10 перемещается относительно ранее известного географического положения, курса и/или темпа (скорости) на основе данных, генерированных модулем 136 INS для определения обновленного положения, курса и темпа (скорости) снегохода 10 в данный момент времени.
[0036] Модуль 136 INS может позволить ECU 126 определять текущее географическое положение, направление и темп (скорость) снегохода 10, когда модуль 134 GPS не может связываться со спутником 138 GPS и принимать данные от него.
Кроме того, ECU 126 может быть выполнен с возможностью экономии энергии за счет использования в основном модуля 136 INS в качестве основного источника географических данных и использования данных из модуля 134 GPS для периодической калибровки модуля 136 INS с учетом текущего географического положения, курса и/или темпа (скорости) снегохода 10, как определено посредством данных, полученных со спутника 138 GPS.
Другими словами, ECU 126 может быть выполнен с возможностью генерирования рабочих данных, указывающих текущее положение, курс и/или темп (скорость) снегохода 10, будучи выполненным с возможностью калибровки модуля 136 INS с использованием модуля 134 GPS, управления INS модулем 136 для генерирования этих данных в течение заданного периода времени, повторной калибровки модуля 136 INS с использованием модуля 134 GPS в ответ на истечение периода времени и так далее.
[0037] Множество датчиков 130 могут быть выполнены с возможностью вычисления и генерирования данных о состоянии местности и рабочих данных, указывающих текущее рабочее состояние снегохода 10.
ECU 126 может быть выполнен с возможностью использования данных о состоянии местности и рабочих данных, генерированных датчиками 130, для управления EAD 124, как будет дополнительно описано ниже.
[0038] Например, множество датчиков 130 могут включать в себя тахометр 130А, выполненный с возможностью вычисления и генерирования данных, указывающих скорость вращения двигателя 16, датчик 130 В запроса крутящего момента, выполненный с возможностью вычисления и генерирования данных, указывающих величину крутящего момента (т.е. уровень дросселирования), запрашиваемого пользователем/оператором от двигателя 16 через дроссель 114 (например, степень, с которой пользователь/оператор активирует дроссельную заслонку 114), и спидометр (т.е. датчик скорости) 130С, выполненный с возможностью расчета и формирования данных, указывающих текущую скорость (темп) снегохода 10.
Кроме того, множество датчиков 130 могут включать в себя датчик 130D гусеничной ленты или датчик 130K эффекта Холла, выполненный с возможностью вычисления и генерирования данных, указывающих скорость вращения гусеничной ленты 22 вокруг множества колес 24 во время работы снегохода 10.
Еще дополнительно, множество датчиков 130 могут включать в себя датчик 130Е силы, выполненный с возможностью расчета и генерирования данных в отношении относительной величины силы, прикладываемой к сиденью 40 (например, когда пользователь снегохода 10 сидит на сиденье 40 или стоит во время работы).
Еще дополнительно, множество датчиков 130 могут включать в себя датчик 130F крутящего момента боковой нагрузки, выполненный с возможностью вычисления и генерирования данных в отношении относительной величины боковой нагрузки рулевого управления, соответствующей переносу веса пользователя/оператора.
Еще дополнительно, множество датчиков 130 могут включать в себя датчик 130J тормоза, генерирующий данные 324 тормозного рычага, указывающие на применение тормоза 44 пользователем.
[0039] По меньшей мере, один из множества датчиков 130 может быть расположен рядом с системой 30 рулевого управления для генерирования рабочих данных, указывающих состояние системы 30 рулевого управления.
Например, множество датчиков 130 могут включать в себя датчик 130G угла рулевого управления, выполненный с возможностью вычисления и генерирования данных, указывающих текущий угол ручки 38, например, относительно центрального положения ручки 38, и датчик 130Н крутящего момента (см. Фигуры 3 и 5), выполненный с возможностью вычисления и генерирования данных, указывающих величину и направление крутящего момента на рулевой колонке 32.
Еще дополнительно, множество датчиков 130 могут включать в себя датчик 1301 положения, выполненный с возможностью вычисления и генерирования данных, указывающих ударную нагрузку на амортизаторы 42, и который предназначен для вычисления и генерирование данных, указывающих на относительные возмущения на местности, которые испытывает пользователь через систему 30 рулевого управления, которые могут влиять на состояние системы 30 рулевого управления.
[0040] Предпочтительно, множество датчиков 130 включают в себя датчик 130Н крутящего момента, расположенный рядом с системой 30 рулевого управления и, предпочтительно, рядом с валом 35 рулевого управления (см. Фиг. 3).
В дополнительных вариантах осуществления, множество датчиков 130 включают в себя датчик 130G угла поворота рулевого колеса и датчик 130Н крутящего момента, как описано выше.
[0041] Кроме того, модуль 134 GPS и модуль 136 INS могут также рассматриваться, как датчики 130 снегохода 10 и также могут быть выполнены с возможностью использования акселерометра, гироскопа и/или магнитометра для расчета и генерирования других рабочих данных, касающихся дополнительных характеристики снегохода 10.
Например, модуль INS может быть выполнен с возможностью использования гироскопа для расчета и генерирования дополнительных рабочих данных снегохода 10 об относительной величине крена снегохода 10 во время поворота (иногда также называемого креном транспортного средства) и/или для расчета и генерирования данных, относящихся к среднему небольшому положительному угловому положению по оси X элементов 14 зацепления с землей во время работы снегохода (например, когда передние лыжи 14 находятся выше, чем гусеничная лента 22).
[0042] HMI 132 может быть расположен рядом с ручкой 38 и может способствовать взаимодействию пользователя с другими компонентами снегохода 10, такими как компоненты системы 102 управления движением.
Например, HMI 132 может обеспечивать взаимодействие пользователя с ECU 126 и навигационной системой 128, описанной выше.
HMI 132 может включать в себя один или несколько видео и буквенно-цифровых дисплеев, акустическую систему и любые другие подходящие аудио и визуальные индикаторы, способные предоставлять данные от компонентов снегохода 10 пользователю.
HMI 132 может также включать в себя микрофон, физические элементы управления и любые другие подходящие устройства, способные принимать ввод от пользователя для вызова функций компонентов снегохода 10.
Физические элементы управления могут включать в себя буквенно-цифровую клавиатуру, координатно-указательное
устройство (например, мышь), клавиатуры, кнопки и ручки управления.
Дисплей HMI 132 может быть встроенным дисплеем с сенсорным экраном, который включает в себя механизм сенсорного экрана для приема пользовательского ввода.
[0043] Ссылаясь на фиг.4, ECU 126 может включать в себя процессор 202, память 204, энергонезависимую память 206 и интерфейс 207 ввода/вывода (I/O).
Процессор 202 может включать в себя одно или несколько устройств, выбранных из микропроцессоров, микроконтроллеров, процессоров цифровых сигналов, микрокомпьютеров, центральных процессоров, программируемых вентильных матриц, программируемых логических устройств, конечных автоматов, логических схем, аналоговых схем, цифровых схем или любых других устройств, которые управляют сигналами (аналоговыми или цифровыми) на основе рабочих инструкций, считанных из энергонезависимого запоминающего устройства 206 и сохраненных в памяти 204.
Память 204 может включать в себя одно устройство памяти или множество устройств памяти, включая, но не ограничиваясь, постоянную память (ROM), оперативную память (RAM), энергозависимую память, энергонезависимую память, статическую память с произвольной выборкой (SRAM), динамическая память с произвольной выборкой (DRAM), флэш-память, кэш-память или любое другое устройство, способное хранить информацию.
Энергонезависимое запоминающее устройство 206 может включать в себя одно или несколько устройств постоянного хранения данных, таких как жесткий диск, накопитель на оптических дисках, накопитель на магнитной ленте, энергонезависимое твердотельное устройство или любое другое устройство, способное постоянно хранить информацию.
[0044] Процессор 202 может быть выполнен с возможностью считывания в память 2 04 и выполнения машиноисполняемых инструкций, находящихся в энергонезависимом запоминающем устройстве 206.
Машиноисполняемые инструкции могут воплощать программное обеспечение, такое как приложение 208 активного рулевого управления, и могут быть скомпилированы или интерпретированы из множества языков программирования и/или технологий, включая, без ограничения, и либо по отдельности, либо в комбинации, Java, С, С++, С#, Objective С, Fortran, Pascal, Java Script, Python, Perl и PL/SQL.
[0045] Приложение 208 активного рулевого управления может быть выполнено с возможностью реализации функций, характеристик, модулей, процессов и способов ECU 126, описанных в данном документе.
В частности, выполняемые компьютером инструкции,
воплощающие приложение 208 активного рулевого управления, могут быть сконфигурированы, после выполнения процессором 202, чтобы заставить процессор 202 реализовывать функции, особенности, модули, процессы и способы ECU 12 6, описанные в данном документе.
Например, приложение 208 активного рулевого управления в ECU 126 может быть выполнено с возможностью отслеживания рабочего состояния снегохода 10, например, на основе данных о состоянии местности и рабочих данных, полученных от навигационной системы 128 и/или множества датчиков 130.
В ответ на данные о состоянии местности и рабочие данные, указывающие на крутящий момент, прикладываемый пользователем к системе 30 рулевого управления, например, через ручку 38, приложение 208 активного рулевого управления может быть выполнено с возможностью определения дополнительного крутящего момента для приложения к системе 30 рулевого управления на основе эксплуатационных данных и на основе выбранного характера состояния местности, определенного из данных состояния местности (как будет описано ниже), и для работы EAD 124 для приложения крутящего момента к системе 30 рулевого управления.
Как более подробно описано ниже, приложение дополнительного крутящего момента к системе 30 рулевого управления может функционировать для обеспечения активного демпфера, функции самоцентрирования и других улучшенных функций рулевого управления для пользователя/оператора.
[0046] Энергонезависимое запоминающее устройство 206 может также включать данные, поддерживающие функции, характеристики, модули, процессы и способы ECU 12 6, описанные в данном документе.
Программное обеспечение ECU 126, такое как приложение 208 активного рулевого управления, может быть выполнено с возможностью доступа к этим данным во время выполнения для определения, как обеспечить различные формы улучшенного рулевого управления.
Например, энергонезависимое запоминающее устройство 206 ECU 126 может включать в себя данные 212 рулевого управления.
Как более подробно описано ниже, данные 212 рулевого управления могут образовывать одну или несколько справочных таблиц, которые связывают рабочие условия снегохода 10 и связывают состояния местности для снегохода, например, указанные данными, генерируемыми навигационной системой 128 и/или множеством датчиков 130, с крутящим моментом, применяемым к системе 30 рулевого управления.
Один пример справочной таблицы может включать в себя множество предварительно загруженных характеров 302 состояний местности и включать в себя алгоритм, предназначенный для выбора одного из множества характеров состояния местности на основе данных состояния местности, генерированных множеством датчиков 130, как дополнительно описано ниже.
[0047] ECU 126 может быть функционально связан с одним или несколькими внешними ресурсами 214 через интерфейс 207 I/O ввода-вывода.
Интерфейс 207 I/O ввода-вывода может включать в себя один или несколько беспроводных интерфейсов, таких как Wi-Fi и Bluetooth, и может включать в себя один или несколько проводных интерфейсов, таких как Ethernet и CAN.
Внешние ресурсы 214 могут включать в себя один или несколько других компонентов снегохода 10.
Например, внешние ресурсы 214 могут включать в себя EAD 124, модуль 134 GPS, модуль 136 INS, датчики 130 и HMI 132.
[0048] Хотя пример осуществления снегохода 10 проиллюстрирован на фигурах 1-3, пример не предназначен для ограничения.
Действительно, снегоход 10 может иметь больше или меньше компонентов, и могут использоваться альтернативные компоненты и/или реализации.
Например, два или более из вышеописанных компонентов системы 102 управления движением, такие как два или более из EAD 124, ECU 126, множество датчиков 130 или навигационная система 128, могут быть объединены в сигнальный блок или устройство, адаптированное для крепления к рулевой колонке 118 системы 30 рулевого управления.
В качестве примера, фигуры 2 и 5 иллюстрируют устройство 220 управления движением, адаптированное для крепления к рулевой колонке 32 системы 30 рулевого управления.
Устройство 220 управления движением может включать в себя компоненты системы 102 управления движением, такие как EAD 124, ECU 126 и еще один из датчиков 130 (включая, например, датчик крутящего момента и датчик угла рулевого управления, показанные как 130а на фиг.5).
Кроме того, устройство 220 управления движением также включает в себя двигатель 221 и коробку 223 передач.
Коробка 223 передач соединена с двигателем 221 и рулевым валом 35.
Датчик крутящего момента и датчик 130а угла рулевого управления могут быть подсоединены к рулевому валу 35, могут быть связаны с ECU 126 и могут быть выполнены с возможностью определения деформации рулевого вала 35.
[0049] Фиг. 6 иллюстрирует способ 250 в форме логической блок-схемы для обеспечения улучшенного рулевого управления для снегохода 10 в форме активного демпфера, а фиг. 7 иллюстрирует архитектуру 300 обработки для реализации активного демпфера.
Фиг. 8 также предусматривает логическую блок-схему алгоритма выбора режима для выбора предварительного характера состояния местности на основе генерированных данных рельефа и рабочих условий для помощи архитектуре 300 обработки для выбора характера состояния местности в блоке 254 на фиг. 6, как будет описано дополнительно ниже.
Активный демпфер может функционировать для усиления обратной связи, которую ощущает пользователь/оператор при повороте снегохода 10 посредством ручки 38. Такая обратная связь может внушить пользователю/оператору снегохода 10 большую уверенность и управление рулевым управлением, что приведет к предотвращению потенциально опасных маневров, таких как резкие и чрезмерные операции рулевого управления, как описано выше.
ECU 126 может быть выполнен с возможностью реализации способа 250 и архитектуры 300 обработки, например, после выполнения приложения 208 активного рулевого управления.
Например, архитектура 300 обработки может включать в себя модуль 334 управления активным демпфером, который может быть реализован ECU 126 после выполнения исполняемых компьютером инструкций, воплощающих приложение 208 активного рулевого управления. Затем модуль 334 управления активным демпфером может быть выполнен с возможностью выполнения способа 250.
Таким образом, нижеследующее описание реализации активного демпфера включает ссылки на фигуры 6-8.
[0050] В блоке 252 может быть выполнено определение того, прикладывается ли крутящий момент 312 пользователя (то есть входные данные 312 водителя) к системе 30 рулевого управления, например, посредством вращения ручки 38.
Как описано выше, множество датчиков 130 могут включать в себя датчик 130G угла рулевого управления и датчик 130Н крутящего момента рулевого управления (см. Фиг. 5), который измеряет эти входные данные 312 водителя.
Эти датчики 130, 130Н, 130G могут быть интегрированы с EAD 124 или могут быть внешними по отношению к EAD 124 и иным образом прикреплены к системе 30 рулевого управления снегохода 10 (например, прикреплены к ручке 38 или рулевой колонке 32).
В ответ на ввод крутящего момента 312 пользователя на ручку 38 для выполнения поворота, датчик 130G угла рулевого управления может генерировать рабочие данные, указывающие изменение угла системы 30 рулевого управления или, более конкретно, ручки 38, а датчик 130Н крутящего момента рулевого управления может генерировать рабочие данные, указывающие крутящий момент в системе 30 рулевого управления.
С учетом того что датчик 130G угла рулевого управления, генерирующий рабочие данные, указывающие, что ручка 38 повернута, например, на градус, превышающий заданный порог, и/или что скорость превышает заданный порог, и/или что датчик 130Н крутящего момента рулевого управления, генерирующий рабочие данные, указывающие, что система 30 рулевого управления имеет крутящий момент, превышающий заданный порог, ECU 12 6 может быть выполнен с возможностью определения того, что крутящий момент 312 пользователя применяется к системе 30 рулевого управления.
[0051] В блоке 254 на фиг. 6, и как также показано на фиг. 7, в ответ на приложение крутящего момента 312 пользователя, характер 306, 308 или 310 состояния местности может быть определен и выбран ECU 126 для снегохода 10 из множества предварительно заданных характеров 302 состояний местности, хранящихся в ECU 126, на основании текущих состояний 304 местности (то есть данных 304 состояния местности), в которых работает снегоход 10.
[0052] Поскольку снегоходы 10 обычно работают в условиях заснеженной или покрытой льдом местности, некоторые из множества предварительно заданных характеров 302 состояния местности спроектированы так, чтобы точно соответствовать условиям, наиболее типичным для снегоходных трасс, включая ледяные условия (т.е. характер 306 обледенения на лыжной трассе) и условия уплотненного снега (то есть характер 308 заснеженной лыжной трассы), которые обычно встречаются на известных лыжных трассах, таких как парковые маршруты или государственные трассы.
Дополнительно, по меньшей мере, один предварительно заданный характер состояния местности разработан для соответствия условиям рыхлого снега, которые обычно встречаются вне известных маршрутов снегохода (то есть характер 310 с запорошенной отсутствующей лыжной трассой).
[0053] В частности, ECU 126 определяет, какой из множества предварительно заданных характеров 302 состояния местности должен быть выбран (выбранный характер состояния местности показан как 700 на фиг. 8) на основе данных 304 состояния местности и данных 305 состояния транспортного средства, генерированных множеством датчиков 130.
[0054] Еще более конкретно, в определенных вариантах осуществления (называемых здесь первым примером осуществления), ECU 126 выполнен с возможностью выбора характера 306, 308 или 310 состояния местности, будучи выполненным с возможностью:
(a) определения относительной скорости дросселирования дроссельной заслонки 114;
(b) определения относительной степени крена снегохода 10;
(c) определения относительной степени увеличения демпфирования рулевого управления для снегохода 10;
(d) выбора предварительного характера состояния местности для каждого из этапов (а)-(с);
(е) выбора характера состояния местности на основе сравнения выбранных предварительных характеров состояния местности на этапе (d).
[0055] В качестве альтернативы, в определенных других вариантах осуществления (называемых здесь вторым примером осуществления), ECU 126 выполнен с возможностью выбора характера 306, 308 или 310 состояния местности, будучи дополнительно выполненным с возможностью:
(a) определения относительной скорости дросселирования дроссельной заслонки 114;
(b) определения относительной степени крена снегохода 10;
(c) определения относительной степени увеличения демпфирования рулевого управления для снегохода;
(d) определения относительной степени проскальзывания гусеницы между гусеничной лентой 22 и местностью;
(e) определения относительной степени нагрузки, приложенной к амортизатору 42, связанному, по меньшей мере, с одним элементом 14 зацепления с землей;
(f) определения силы, приложенной к сиденью 40, соединенному с кузовом 12 транспортного средства, от пользователя;
(g) определения относительного расположения снегохода 10 на местности;
(h) определения относительной степени боковой нагрузки рулевого управления;
(i) выбора предварительного характера состояния местности для каждого из этапов (a)-(h); а также
(j) выбора характера состояния местности на основе сравнения выбранных предварительных характеров состояния местности на этапе (i).
[0056] Методология определения критериев этапов (а)-(с) (то есть конкретных текущих эксплуатационных данных или данных 304, 305 о состоянии местности каждого отдельного этапа (а)-(с)) в первом примере осуществления, или для определения критериев этапов (a)-(h) во втором примере осуществления, использует данные 304 состояния местности и/или данные 305 состояния транспортного средства (см. фиг. 7), которые принимаются от INS 136, множества датчиков 130 и/или навигационной системы 128.
[0057] Такие данные 304 состояния местности и/или данные 305 состояния транспортного средства, которые могут использоваться для выбора предварительного характера 406, 408, 410 состояния местности (см. фиг. 8) в любом одном из критериев этапов (а)-(с) в первом примере осуществления, или этапов (а)-(h) во втором примере осуществления, включают: данные 314 инерциального измерительного блока (IMU), генерированные от гироскопов или акселерометров, данные 316 запроса крутящего момента двигателя, указывающие значение запроса крутящего момента двигателя, соответствующее степени активации дросселя 114 пользователем, измеренной датчиком 130В запроса крутящего момента, данные 318 оборотов двигателя, указывающие значение оборотов двигателя 16, измеренные тахометром 130А, данные 320 боковой нагрузки на руль, указывающие относительную степень боковой нагрузки на руль 38 во время работы снегохода, генерируемые датчиком 130F крутящего момента боковой нагрузки и/или датчиком 130Н крутящего момента, данные 322 нагрузки подвески, такие как относительная степень нагрузки, приложенной к амортизатору 42, генерируемые датчиком положения 130I, и/или относительной степени нагрузки, прикладываемой к сиденью 40 пользователем, генерированные датчиком 130Е усилия сиденья водителя, данные 324 рычага тормоза, указывающие на применение тормоза 44 пользователем, генерированные от датчика 130J тормоза, данные 326 скорости транспортного средства, указывающие скорость снегохода 10, полученные от спидометра 130С и/или от модуля 134 GPS или другого датчика 130 скорости, данные 328 угла рулевого управления, указывающие относительную степень угла поворота руля 38 в первом или втором направлении относительно нейтрального положения, генерируемые датчиком 130G угла рулевого управления и/или датчиком 130Н крутящего момента рулевого управления, данные 330 путевой скорости, указывающие скорость, с которой снегоход движется по местности, генерируемые модулем 134 GPS или спидометром 130С, и данные 332 скорости гусеничной ленты, указывающие относительную скорость вращения гусеничной ленты 22 вокруг множества колес 24, генерируемые датчиком 130К эффекта Холла и/или спидометром 130С и/или датчиком 130D гусеничной ленты.
Данные 305 состояния транспортного средства принимаются в мультиплексор (MUX) 338 модуля 334 управления активным демпфером.
Данные 330 путевой скорости и данные 332 скорости гусеницы, генерированные модулем 134 GPS или датчиком 130С скорости, также могут быть получены модулем управления активным демпфером и сравниваться друг с другом посредством ECU 126 для определения измеренной величины 336 скольжения гусеницы, которая также вводится в мультиплексор 338.
[0058] Как отмечалось выше, как часть методологии первого или второго примера осуществления, в блоке 254 для определения выбора характера 302 состояния местности, предварительные характеры 406, 408, 410 состояния местности выбираются индивидуально для каждого из критериев для этапов (а)-(с) в первом примере осуществления, или каждого из критериев для этапов (a)-(h) во втором примере осуществления.
Вес каждого предварительного характера состояния местности для каждого отдельного этапа (а)-(с) в первом примере осуществления, или для каждого отдельного этапа (a)-(h) второго примера осуществления, для определения выбора характера состояния местности для последующего определения величины первого крутящего момента, применяемого к системе рулевого управления для обеспечения улучшенного рулевого управления, может изменяться в относительной пропорции от очень большой величины до очень небольшой величины в зависимости от определенного уникального набора данных и обеспечивается алгоритмом, включенным в предварительно загруженное программное обеспечение или справочные таблицы, содержащиеся в памяти 204 ECU 126.
[0059] Для определения предварительного характера 406 408, 410 состояния местности, для выбора для каждого из отдельных этапов (а)-(с) или (a)-(h) и для последующего определения методологии выбора характера 700 состояния местности (соответствующего выбранному одному из характеров 302 состояния местности, выбранному из 306, 308, 310), логическая блок-схема алгоритма 400 выбора характера, такого как проиллюстрирован на фиг. 8, может использоваться для определения того, какой предварительный характер 406, 408, 410 состояния местности выбрать на основе определенных данных о местности или операции на отдельных этапах (а)-(с) или (a)-(h).
[0060] Обращаясь теперь к фиг. 8, алгоритм 400 выбора характера включает в себя блок-схему для определения того, какой из трех отдельных характеров выбора предварительно выбрать, по меньшей мере, для некоторых критериев этапов (a)-(h), предусмотренных во втором примере осуществления.
В частности, алгоритм 400 выбора характера включает в себя предварительный характер 406 состояния местности с обледенелой лыжней, предварительный характер 408 состояния местности с заснеженной лыжней и предварительный характер 410 состояния местности с запорошенной отсутствующей лыжней.
Предварительные характеры 406, 408, 410 состояния местности тесно связаны с соответствующим характером 306 ледового покрова на лыжне, характером 308 снега на лыжне и характером 310 запорошенной отсутствующей лыжней и используются ECU 126 при определении какой выбрать характер 306, 308, 310 состояния местности из множества характеров 302 состояния местности (то есть выбранный характер 700 состояния местности, как показано на фиг. 8) на основе комбинации выбранных предварительных характеров 406, 408, 410 состояния местности.
[0061] Что касается этапа (а), алгоритм 400 выбора характера начинается в блоке 412, в котором данные 316 запроса крутящего момента двигателя обеспечивают текущую определенную относительную скорость дросселирования и сравнивает определенную относительную скорость дросселирования с заранее определенными соответствующими низкими и высокими пороговыми значениями скорости дросселирования (блоки 414 и 416), которые хранятся в справочной таблице в ECU 126.
Если ECU 126 определяет, что определенная относительная скорость дросселирования превышает заранее определенное высокое пороговое значение скорости дросселирования, определяется состояние высокой пороговой скорости дросселирования (блок 418) и выбирается предварительный характер 408 состояния местности с заснеженной лыжней.
Если ECU 126 определяет, что определенная относительная скорость дросселирования ниже заранее определенного низкого порогового значения скорости дросселирования, определяется состояние низкой пороговой скорости дросселирования (блок 420) и выбирается предварительный характер 410 состояния местности с запорошенной отсутствующей лыжней.
Если ECU 126 определяет, что определенная относительная скорость дросселирования равна или ниже заранее определенного высокого порогового значения скорости дросселирования и равна или выше заранее определенного низкого порогового значения скорости дросселирования, определяется среднее состояние порогового значения скорости (блок 422) и выбирается предварительный характер 406 состояния местности с обледенелой лыжней.
[0062] Что касается этапа (b), алгоритм 400 выбора характера начинается в блоке 430, в котором определяется угловое положение Y снегохода 10, иногда называемое угловым градусом крена транспортного средства, снегохода относительно оси Y, которая соответствует данным 314 инерциальных измерений, генерируемых гироскопами или акселерометрами.
Если ECU 126 определяет, что определенная степень крена транспортного средства превышает заданное угловое положении у величины крена транспортного средства (блок 432), выбирается предварительный характер 410 состояния местности с запорошенной отсутствующей лыжней.
Если ECU 126 определяет, что определенная степень крена транспортного средства равна или ниже заданного углового положения у величины крена транспортного средства (блок 432), выбирается предварительный характер 4 08 состояния местности со снегом на маршруте.
[0063] Что касается этапа (с), алгоритм 400 выбора характера начинается в блоке 440, в котором увеличение демпфирования рулевого управления для снегохода определяется с использованием, по меньшей мере, датчика 130 крутящего момента, и сравнивается определенное увеличение демпфирования рулевого управления с заранее заданным низким и высоким пороговым значением увеличения демпфирования рулевого управления (блоки 452 и 454), которые сохраняются в справочной таблице в ECU 126.
Увеличение демпфирования рулевого управления может быть определено из расчета логики демпфирования (блок 442), которая учитывает определенную скорость 442 транспортного средства (вычисленную ECU 126 из данных 326 скорости транспортного средства), скорость 444 рулевого управления (вычисленную ECU 126 из данные 328 угла рулевого управления и пользовательского крутящего момента 312), пользовательский крутящий момент 448 (то есть пользовательский крутящий момент 312) и кажущееся ускорение 444 транспортного средства (вычисленное ECU на основе данных 316 дроссельной заслонки двигателя, данных 336 путевой скорости и данных 332 скорости гусеницы).
[0064] Если ECU 126 определяет, что определенное увеличение демпфирования рулевого управления превышает заранее определенное высокое увеличение демпфирования рулевого управления, определяется состояние входных сигналов прямого пути (блок 456) и выбирается предварительный характер 406 состояния местности с обледенелой лыжней.
Если ECU 126 определяет, что определенное увеличение демпфирования рулевого управления ниже заранее определенного низкого увеличения демпфирования рулевого управления, определяется состояние входных сигналов легкого пути (блок 458) и выбирается предварительный характер 410 состояния местности с запорошенной отсутствующей лыжней.
Если ECU 126 определяет, что определенное увеличение демпфирования рулевого управления равно или ниже заранее определенного высокого увеличения демпфирования рулевого управления и равно или выше заранее определенного увеличения демпфирования рулевого управления, определяется состояние входных сигналов среднего пути (блок 460) и выбирается предварительный характер 408 состояния местности с заснеженной лыжней.
[0065] Что касается этапа (d), алгоритм 400 выбора режима начинается в блоке 474, в котором измеренная скорость скольжения гусеницы определяется путем сравнения текущей скорости гусеничной ленты (блок 470) (вычисленной ECU 126 из данных 332 скорости гусеничной ленты), с текущей путевой скоростью снегохода (блок 472) (вычисленной ECU 126 из данных 330 путевой скорости).
[0066] Если ECU 126 определяет, что определенная измеренная скорость проскальзывания гусеницы превышает заранее определенную высокую пороговую скорость проскальзывания гусеницы, определяется состояние высокого проскальзывания гусеницы (блок 480) и выбирается предварительный характер 406 состояния местности с обледенелой лыжней.
Если ECU 126 определяет, что определенная измеренная скорость проскальзывания гусеницы ниже заданного низкого порогового значения скорости проскальзывания гусеницы, определяется состояние малого проскальзывания гусеницы (блок 482) и выбирается предварительный характер 408 состояния местности с заснеженной лыжней или предварительный характер 410 состояния местности с обледенелой лыжней.
Если ECU 126 определяет, что определенная измеренная скорость проскальзывания гусеницы равна или ниже предварительно определенной высокой пороговой скорости проскальзывания гусеницы и равна или превышает заранее определенную низкую скорость проскальзывания гусеницы, определяется состояние среднего проскальзывания гусеницы (блок 484) и выбирается предварительный характер 410 состояния местности с запорошенной отсутствующей лыжней.
[0067] Что касается этапа (е), алгоритм 400 выбора режима начинается в блоке 486, в котором измеряется передняя ударная нагрузка амортизатора 42 снегохода 10, которая соответствует данным 322 нагрузки подвески, таким как относительная степень нагрузки, приложенная к амортизатору 42, генерируемая датчиком 130 положения, как указано выше.
Если ECU 126 определяет, что измеренная нагрузка переднего амортизатора превышает заданное пороговое значение для переднего амортизатора в рыхлом снегу (блок 488), в равной степени выбираются предварительный характер 406 состояния местности с обледенелой лыжней и состояние местности с заснеженной лыжней.
Если ECU 126 определяет, что измеренная нагрузка переднего амортизатора равна или ниже заданного порогового значения для переднего амортизатора в рыхлом снегу, выбирается предварительный характер 410 состояния местности с запорошенной отсутствующей лыжней.
[0068] Что касается этапа (f), алгоритм 400 выбора режима начинается в блоке 490, в котором усилие нагрузки, приложенное к сиденью водителя снегохода 10, измеряется датчиком давления сиденья водителя, которое соответствует данным 322 нагрузки на подвеску, таким как относительная степень нагрузки, приложенная к сиденью 40, генерируемым от датчика 130 давления сиденья водителя, как отмечено выше.
Если ECU 126 определяет, что нагрузка от давления на сиденье водителя превышает заданное пороговое значение давления (блок 492), в равной степени выбираются предварительный характер 406 состояния местности с обледенелой лыжней и предварительный характер 408 состояния местности с заснеженной лыжней.
Если ECU 126 определяет, что нагрузка от давления на сиденье водителя равна или ниже заданного порогового значения давления, выбирается предварительный характер 410 состояния местности с запорошенной отсутствующей лыжней.
[0069] Что касается этапа (g), алгоритм 400 выбора режима начинается в блоке 498, в котором ECU 126 определяет, находится ли снегоход 10 на зарегистрированной или иным образом известной трассе, определяя относительное положение снегохода на местности с использованием модуля 134 GPS (блок 494) и путем доступа к множеству известных или иным образом зарегистрированных трасс, сохраненных в памяти 204 ECU 126 или иным образом сохраненных в модуле 134 GPS (блок 496).
Если ECU 126 определяет, что относительное положение снегохода 10 находится на известной или зарегистрированной трассе, равным образом выбираются предварительный характер 406 состояния местности с обледенелой лыжней и предварительный характер 408 состояния местности с заснеженной лыжней.
Если ECU 126 определяет, что относительное положение снегохода 10 не находится на известной или зарегистрированной трассе, выбирается предварительный характер 410 состояния местности с запорошенной отсутствующей лыжней.
[0070] Что касается этапа (h), алгоритм 400 выбора режима начинается в блоке 504, в котором определяется боковая нагрузка на рулевое управление, которая соответствует данным 320 боковой нагрузки на руль, указывающим относительную степень боковой нагрузки на руль 38 во время работы снегохода 10, генерируемым датчиком крутящего момента, как указано выше.
Если ECU 126 определяет, что измеренная боковая нагрузка на рулевое управление превышает заданное пороговое значение боковой нагрузки (блок 506), то в равной степени выбираются предварительный характер 406 состояния местности с обледенелой лыжней и предварительный характер 408 состояния местности с заснеженной лыжней.
Если ECU 126 определяет, что измеренная боковая нагрузка на рулевое управление равна или ниже заданного порогового значения боковой нагрузки, выбирается предварительный характер 410 состояния местности с запорошенной отсутствующей лыжней.
[0071] В некоторых примерах осуществления, в дополнение к выбору предварительных характеров 406, 408, 410 состояния местности, как на этапах (а)-(с) первого примера осуществления, или этапах (a)-(h) во втором примере осуществления, один или несколько дополнительных рабочих параметров снегохода 10 также могут быть включены с выбранным соответствующим индивидуальным или общим предварительным характером 406, 408 или 410 состояния местности.
В частности, в одном примере осуществления, данные 304 состояния местности также могут использоваться для определения бокового смещения снегохода 10 в направлении Z относительно местности (этап (k)) и/или для определения положительного значения углового смещения X, по меньшей мере, одного элемента 14, зацепления с землей (этап (1)).
Дополнительный предварительный характер 406, 408 или 410 состояния местности, основанный на определенном поперечном смещении снегохода в направлении Z относительно местности, определенном положительном угловом смещении X, по меньшей мере, одного элемента зацепления с землей или их комбинации, затем могут быть определены на этапе (j).
[0072] Наконец, выбор характера 700 состояния местности из множества характеров 302 (или 306, 308, 310) состояния местности выполняется ECU 126 на основе сравнения выбранных предварительных характеров 406, 408, 410 состояния местности от этапа (d) из определенных критериев этапов (а)-(с) первого примера осуществления, или на основе сравнения выбранных предварительных характеров 406, 408, 410 состояния местности от этапа (i) во втором примере осуществления, который соответствует генерированным данным 304 состояния местности, и/или генерированным данным 305 состояния местности, генерированным датчиками 130 и, возможно, также на основе сравнения дополнительного выбранного характера состояния местности из вышеприведенного шага (j).
В частности, конкретная комбинация выбора предварительных характеров местности (например, суммы соответствующих выбранных предварительных характеров 406, 408, 410 состояния местности согласно блок-схеме на фиг. 8) сравнивается алгоритмом с предварительно загруженным программным обеспечением или справочными таблицами, содержащимися в памяти 204 ECU 126, для определения, какой характер состояния местности (то есть, какой характер 302 из характера 306 с обледеневшей лыжней, характера 308 с заснеженной лыжней, или характера 310 с запорошенной отсутствующей лыжней должен быть выбранным характером 700), наиболее точно соответствующим состоянию местности, в которой работает снегоход.
На основе этого определения, ECU 126 выбирает наиболее подходящий один из характеров 306, 308, 310 состояния местности в качестве выбранного характера 700, который используется на дополнительных этапах способа ниже.
[0073] В блоке 256, в ответ на приложение крутящего момента 312 пользователя к системе 30 рулевого управления, могут определяться угол и скорость системы 30 рулевого управления, такие как угол и скорость поворота ручки 38.
В частности, ECU 126 может быть сконфигурирован, например, посредством реализации модуля 334 управления активным демпфером, для определения данных 328 угла/скорости рулевого управления, указывающих угол и скорость системы 30 рулевого управления на основе рабочих данных, генерированных датчиком угла рулевого управления.
Рабочие данные, генерируемые датчиком 130 угла рулевого управления, могут указывать угол системы 30 рулевого управления или, в частности, ручки 38.
Рабочие данные, генерируемые датчиком угла рулевого управления, также могут указывать скорость поворота ручки 38, посредством указания изменения угла ручки 38 с течением времени.
[0074] В блоке 258, целевой крутящий момент для системы 30 рулевого управления может быть определен, например, на основе рабочих данных, генерированных множеством датчиков 130 и/или навигационной системой 128 снегохода 10, и на основе выбранного характера 700 состояния местности из множества характеров 302 (306, 308, 310) состояния местности, как определено в блоке 254.
В некоторых вариантах осуществления, целевой крутящий момент представляет собой центрирующий крутящий момент, который при последующем приложении к системе 30 рулевого управления возвращает систему 30 рулевого управления в центральное положение (то есть положение, в котором управляемый пользователем элемент 38 рулевого управления, такой как ручка 38, центрируется таким образом, что снегоход 10 движется по прямой, соответствующей оси, определенной вдоль длины снегохода 10).
[0075] В частности, модуль 334 управления активным демпфером может принимать данные 328 угла/скорости рулевого управления, определенные на основе рабочих данных, генерированных датчиком угла рулевого управления.
Модуль 334 управления активным демпфером также может получать дополнительные рабочие данные, а именно некоторые данные 305 о состоянии транспортного средства, от множества датчиков 130 и/или навигационной системы 128, как описано выше.
Кроме того, модуль 334 управления активным демпфером может принимать выбранный характер 700 состояния местности от ECU 126, определенный на этапе 254.
[0076] Модуль 334 управления активным демпфером может быть выполнен с возможностью определения данных 340 целевого крутящего момента (т.е. запрошенного EPS крутящего момента 340 на фиг. 7) на основе угла и скорости системы 30 рулевого управления, указанных в данных 328 угла/скорости и/или на основе одного или нескольких значений, определенных из дополнительных данных, в сочетании с выбранным характером 700 состояния местности, как описано выше.
Данные 340 целевого крутящего момента могут указывать величину крутящего момента, которая должна присутствовать в системе 30 рулевого управления во время поворота, чтобы имитировать для пользователя ощущение вождения на основе обратной связи рулевого управления, которое также основано на текущих условиях местности.
Другими словами, данные 340 целевого крутящего момента могут указывать величину крутящего момента, который должен существовать в системе 30 рулевого управления, чтобы пользователь/оператор чувствовал силу сопротивления при выполнении поворота, подходящего для текущих состояний местности.
[0077] Модуль 334 управления активным демпфером может быть выполнен с возможностью определения данных 340 целевого крутящего момента на основе данных рулевого управления.
Данные рулевого управления ECU 126 могут включать в себя справочную таблицу, которая связывает один или несколько рабочих параметров (например, значение оборотов двигателя, значение запроса крутящего момента двигателя, значение скорости транспортного средства, угол рулевого управления и/или скорость рулевого управления) из данных состояния транспортного средства и выбранного характера 700 состояния местности с целевым крутящим моментом для системы 30 рулевого управления, которые затем могут указываться данными 340 целевого крутящего момента.
В качестве альтернативы, модуль 334 управления активным демпфером может быть выполнен с возможностью определения данных 340 целевого крутящего момента путем применения одного или нескольких из этих элементов данных в формуле, которая также может быть сохранена в ECU 126.
[0078] В блоке 260 может быть определен текущий крутящий момент (иногда альтернативно называемый вторым крутящим моментом с тем, чтобы отличать от первого крутящего момента или крутящего момента 344 EPS, приложенного к системе 30 рулевого управления, как описано ниже) в системе 30 рулевого управления.
В частности, ECU 126 может быть выполнен с возможностью определения данных 352 крутящего момента рулевого управления (обозначенных как входной крутящий момент 352 на фиг. 7), указывающих текущий крутящий момент в системе 30 рулевого управления на основе рабочих данных, генерируемых датчиками 130, такими как датчик крутящего момента.
[0079] В блоке 262, целевой крутящий момент и текущий крутящий момент в системе 30 рулевого управления могут сравниваться для определения ошибки между ними.
В частности, модуль 334 управления активным демпфером может быть выполнен с возможностью сложения 341 данных 340 целевого крутящего момента и данных 352 крутящего момента рулевого управления для вычисления ошибки между текущим крутящим моментом в системе 30 рулевого управления и целевым крутящим моментом для системы 30 рулевого управления.
Модуль 334 управления активным демпфером может быть выполнен с возможностью применения результирующей ошибки к алгоритму 342 управления.
[0080] В блоке 264, крутящий момент 344 EPS (см. Фиг. 7, иногда альтернативно упоминаемый как первый крутящий момент), применяемый к системе 30 рулевого управления, может быть определен на основе сравнения.
В частности, алгоритм 342 управления, который может включать в себя пропорционально-интегрально-производный (PID) алгоритм, может быть выполнен с возможностью определения крутящего момента 344 EPS, который уменьшает или устраняет ошибку.
Например, алгоритм 342 управления может определять, в качестве крутящего момента 344 EPS, резистивный крутящий момент, который имеет величину, равную ошибке, и находится в направлении, противоположном повороту ручки 38.
[0081] В блоке 266, EAD 124 может действовать для приложения крутящего момента 344 EPS к системе 30 рулевого управления.
Например, ECU 126 может быть выполнен с возможностью генерирования командного сигнала для EAD 124, который после приема EAD 124 заставляет EAD 124 прикладывать крутящий момент 344 EPS к системе 30 рулевого управления, например, через рулевую колонку 32.
Более конкретно, данные управления рулевым управлением могут определять справочную таблицу, связывающую каждый из различных уровней электрического тока с уровнем крутящего момента, прикладываемого к системе 30 рулевого управления или, в частности, к рулевой колонке 32, посредством EAD 124 в ответ на приложение уровня электрического тока к двигателю 125.
Таким образом, ECU 126 может быть выполнен с возможность подачи на двигатель 125 уровня электрического тока, связанного с крутящим моментом 344 EPS в данных 212 управления рулевым управлением.
[0082] Как описано ранее, крутящий момент 344 EPS может быть резистивным крутящим моментом, который прикладывается в направлении, противоположном повороту ручки 38.
Таким образом, приложенный крутящий момент может затруднить поворот ручки 38 и, тем самым, обеспечить обратную связь с пользователем/оператором.
Величина обратной связи может соответствовать текущим рабочим параметрам снегохода 10, таким как один или несколько из углов поворота системы 30 рулевого управления, которые могут быть представлены углом поворота ручки 38, скорости системы 30 рулевого управления, которая может быть представлена скоростью поворота ручки 38, значением об/мин двигателя 16, значением запроса крутящего момента двигателя и скоростью снегохода 10.
[0083] В альтернативных вариантах осуществления и, как отмечалось выше, крутящий момент 344 EPS может быть центрирующим крутящим моментом, который прикладывается в направлении, противоположном повороту ручки 38, для возврата системы 30 рулевого управления в центральное положение (то есть в положение, в котором управляемый пользователем элемент 38 рулевого управления, такой как ручка 38, центрирован так, что снегоход 10 движется прямо в соответствии с осью, определенной вдоль длины снегохода 10).
[0084] В некоторых примерах, вместо определения и сравнения данных 340 целевого крутящего момента с данными 352 крутящего момента рулевого управления, модуль 334 управления активным демпфером может быть выполнен с возможностью определения крутящего момента 344 EPS на основе рабочих данных, состоящих только из угла поворота и скорости поворота системы 30 рулевого управления (например, данных 328 угла поворота/скорости).
Другими словами, определение данных 340 целевого крутящего момента рулевого управления и сравнение 341 могут быть опущены.
В этом случае, данные управления рулевым управлением могут включать в себя справочную таблицу, которая связывает каждую из различных комбинаций угла и скорости со значением крутящего момента 344 EPS, или, более конкретно, с уровнем электрического тока, подаваемого на двигатель 125 EAD 124, чтобы заставить EAD 124 применить это значение для крутящего момента 344 EPS.
Соответственно, модуль 334 управления активным демпфером может быть выполнен с возможностью определения крутящего момента 344 EPS, или, более конкретно, уровня электрического тока, чтобы заставить EAD 126 обеспечивать крутящий момент 344 EPS, путем запроса данных управления рулевым управлением на основе только угла и скорости поворота системы 30 рулевого управления, тем самым сокращая время обработки для установки активного демпфера.
[0085] Как иллюстрировано на обеих фигурах 6 и 7, ECU 126 может быть выполнен с возможностью реализации контура обратной связи, который регулирует крутящий момент 344 EPS, прикладываемый к системе 30 рулевого управления посредством EAD 124 для обеспечения пользователю/оператору соответствующую обратную связь рулевого управления во время различных частей поворота.
В частности, ECU 126 может быть выполнен с возможностью регулировки приложенного крутящего момента 344 EPS на основании, по меньшей мере, обновлений данных 328 угла/скорости поворота рулевого управления с течением времени.
Например, как показано на фиг. 6, способ 250 может возвращаться к началу отслеживания крутящего момента пользователя в системе 30 рулевого управления, определению и выбору характера состояния местности, определению угла и скорости системы 30 рулевого управления, вызванных крутящим моментом пользователя, и т.д.
Ссылаясь на фиг. 7, архитектура 300 обработки может включать в себя цикл, который на каждой итерации определяет обновленные данные 328 угла поворота/скорости и/или обновленные данные 34 0 целевого крутящего момента и данные 352 крутящего момента рулевого управления, и определяет обновленный крутящий момент 344 EPS. на основании этого.
[0086] Снегоходы 10, включающие улучшенное рулевое управление, и связанный с ним способ использования описаны здесь.
В одном примере, снегоход 10 может включать в себя систему 102 управления движением, соединенную с системой 30 рулевого управления снегохода 10, и выполненную с возможностью приложения крутящего момента к системе 30 рулевого управления на основе электрических сигналов, полученных от ECU 126 через состояние местности и рабочие данные, генерируемые множеством датчиков 130.
Во время работы снегохода 10, система 102 управления движением может быть выполнена с возможностью реализации расширенных функций рулевого управления, таких как активный демпфер, регулируемый на основе различных рабочих параметров, контролируемых ECU 126, и на основе выбранного характера 700 состояния местности, как определено ECU 126.
[0087] Усовершенствованные функции рулевого управления могут повысить доверие пользователю/оператору, обеспечить лучшее управление рулевым управлением и избежать потенциально опасных маневров.
В частности, настоящее раскрытие обеспечивает улучшенное управление рулевым управлением снегоходов, которое функционирует для ускорения кривой обучения навыкам для начинающих, управляющих снегоходом, особенно в суровых условиях местности, таких как условия на обледенелой местности или в условиях местности с рыхлым снегом.
Настоящее раскрытие также снижает физические усилия, необходимые для выполнения различных маневров на снегоходе, в зависимости от состояния местности и условий эксплуатации, поскольку предусмотренный здесь усилитель рулевого управления будет стимулировать рулевое управление в правильном направлении для достижения и поддержания цели баланса.
Еще дополнительно, настоящее раскрытие помогает пользователю устранить дисбаланс во время маневра поворота, позволяя пользователю инициировать перемещение тела для инициирования кренения салазок, в то же время, позволяя лучше держаться за руль по сравнению с обычно более легким рулевым управлением.
[0088] Настоящее раскрытие также обеспечивает демпфирование или увеличивает сопротивление рулевому управлению, когда вес водителя передается на заднюю часть при движении по крутым склонам (т.е. в состоянии подъема в гору) или при резком ускорении, что разгружает элементы 14 зацепления с землей и делает усилие рулевого управления более легким для пользователя, и минимальное влияние рулевого управления на элементы 14 зацепления с землей.
Настоящее раскрытие также обеспечивает поддержку рулевого управления или снижает сопротивление рулевому управлению, когда вес водителя передается на переднюю часть при движении на крутых спусках (т.е. состоянии спуска с горы) или при резком торможении, что нагружает элементы 14 зацепления с землей и делает усилие рулевого управления более тяжелым для пользователя и влияние рулевого управления для устранения эффекта вспашки элементов зацепления с землей или носовой части снегохода 10 в условиях глубокого снега, которые затрудняют управление снегоходом 10.
Настоящее изобретение также обеспечивает помощь в рулевом управлении, когда вес водителя сосредоточен на сиденье 40 при движении в ровных условиях (то есть в нейтральных условиях, которые не являются ни состоянием спуска, ни состоянием подъема).
В каждом варианте осуществления, контроллер 126 выполнен с возможностью определения того, находится ли снегоход 10 в условиях спуска, нейтрали или подъема, а система 102 управления движением сконфигурирована для изменения относительной степени приложенного крутящего момента к системе 30 рулевого управления на основе определенного состояния подъема или на основе определенного состояния спуска или на основе определенного нейтрального состояния.
[0089] В общем, программы, выполняемые для реализации вариантов осуществления изобретения, независимо от того, реализованы ли они как часть операционной системы или конкретного приложения, компонента, программы, объекта, модуля или последовательности инструкций, или даже их подмножества, могут быть названы здесь как «компьютерный программный код» или просто «программный код».
Программный код обычно содержит машиночитаемые инструкции, которые постоянно находятся в различных запоминающих устройствах и запоминающих устройствах компьютера, и которые при чтении и выполнении одним или несколькими процессорами компьютера заставляют этот компьютер выполнять операции, необходимые для выполнения операций и/или элементов, воплощающих различные аспекты вариантов осуществления изобретения.
Машиночитаемые программные инструкции для выполнения операций вариантов осуществления изобретения могут быть, например, языком ассемблера или либо исходным кодом, либо объектным кодом, написанным в любой комбинации одного или нескольких языков программирования.
[00 90] Различный программный код, описанный в данном документе, может быть идентифицирован на основе приложения, в котором он реализован в конкретных вариантах осуществления изобретения.
Однако следует понимать, что любая конкретная номенклатура программ, которая следует ниже, используется просто для удобства, и, таким образом, изобретение не должно ограничиваться использованием только в каком-либо конкретном приложении, идентифицированном и/или подразумеваемом такой номенклатурой.
Кроме того, учитывая, как правило, бесконечное количество способов, которыми компьютерные программы могут быть организованы в подпрограммы, процедуры, способы, модули, объекты и т.п., а также различные способы, которыми функциональные возможности программы могут быть распределены между различными уровнями программного обеспечения, которые находясь внутри типичного компьютера (например, операционных систем, библиотек, API, приложений, апплет и т.д.), следует понимать, что варианты осуществления изобретения не ограничиваются конкретной организацией и распределением программных функций, описанных в данном документе.
[0091] Программный код, воплощенный в любом из описанных здесь приложений/модулей, может быть индивидуально или коллективно распространен как программный продукт во множестве различных форм.
В частности, программный код может распространяться с использованием машиночитаемого носителя данных, содержащего машиночитаемые программные инструкции на нем, чтобы заставить процессор выполнять аспекты вариантов осуществления изобретения.
[0092] Машиночитаемый носитель данных, который по своей природе является энергонезависимым, может включать в себя энергозависимые и энергонезависимые, а также съемные и несъемные материальные носители, реализованные любым способом или технологией для хранения информации, например машиночитаемые инструкции, структуры данных, программы. модули или другие данные.
Машиночитаемый носитель данных может дополнительно включать в себя RAM (оперативную память), ROM (постоянную память), стираемое программируемое постоянное запоминающее устройство (EPROM), электрически стираемое программируемое постоянное запоминающее устройство (ЕЕPROM), флэш-память или другую технологию твердотельной памяти, портативное постоянное запоминающее устройство для компакт-дисков (CD-ROM) или другой оптический накопитель, магнитные кассеты, магнитная лента, запоминающее устройство на магнитном диске или другие магнитные запоминающие устройства, или любой другой носитель, который может быть использован для хранения желаемой информации и который может быть прочитан компьютером.
Машиночитаемый носитель данных не следует рассматривать как преходящие сигналы как таковые (например, радиоволны или другие распространяющиеся электромагнитные волны, электромагнитные волны, распространяющиеся через среду передачи, такую как волновод, или электрические сигналы, передаваемые через провод).
Машиночитаемые программные инструкции могут быть загружены в компьютер, другой тип программируемого устройства обработки данных или другое устройство с машиночитаемого носителя данных или на внешний компьютер или внешнее запоминающее устройство через сеть.
[0092] Машиночитаемые программные инструкции, хранящиеся на машиночитаемом носителе, могут использоваться для управления компьютером, другими типами программируемых устройств обработки данных или другими устройствами для работы определенным образом, так что инструкции, хранящиеся на машиночитаемом носителе, производят изделие производства, включая инструкции, которые реализуют функции, действия и/или операции, указанные в блок-схемах, схемах последовательностей и/или функциональных схемах.
Инструкции компьютерной программы могут быть предоставлены одному или нескольким процессорам компьютера общего назначения, компьютеру специального назначения или другому программируемому устройству обработки данных для создания машины, так что инструкции, которые выполняются через один или несколько процессоров, вызывают серии вычислений, которые должны быть выполнены для реализации функций, действий и/или операций, указанных в блок-схемах, схемах последовательностей и/или функциональных схемах.
[0093] В некоторых альтернативных вариантах осуществления функции, действия и/или операции, указанные в блок-схемах, схемах последовательностей и/или функциональных схемах, могут быть переупорядочены, обработаны последовательно и/или обработаны одновременно в соответствии с вариантами осуществления изобретения.
Более того, любая из блок-схем, диаграмм последовательности и/или функциональных схем может включать в себя больше или меньше блоков, чем те, которые проиллюстрированы в соответствии с вариантами осуществления изобретения.
[0095] Терминология используется здесь только для цели описания конкретных вариантов осуществления, а не направлена на то, чтобы ограничивать варианты осуществления изобретения.
Как использовано здесь, формы "a", "an" and "the" единственного числа предполагают также включение форм множественного числа, если в контексте не будет явно указано иное.
Должно быть дополнительно понятно, что термин "содержит" и/или "содержащий", когда используется в этом описании, указывает на наличие изложенных признаков, целых частей, этапов, действий, элементов и/или компонентов, но не исключает наличия или добавления одного или более других признаков, целых частей, этапов, действий, элементов, компонентов и/или их групп.
Более того, в пределах, в которых термины «включает в себя», «имеющий», «имеет», «с», «выполненный из» и их варианты используются либо в подробном описании, либо в формуле изобретения, такие термины подразумеваются включающими в себя, в некотором смысле, подобными термину «содержащий».
[0096] Хотя настоящее изобретение было проиллюстрировано описанием различных вариантов осуществления, и хотя эти варианты осуществления были описаны с некоторыми подробностями, заявители не намерены сужать или каким-либо образом ограничивать объем прилагаемой формулы изобретения для таких деталей.
Дополнительные преимущества и модификации будут без труда ясны для понимания специалистами в данной области техники.
Таким образом, изобретение, в его более широких аспектах, не ограничивается конкретными деталями, типичным устройством и способом, а также показанными и описанными иллюстративными примерами.
Соответственно, отклонения могут быть сделаны из таких детализаций без отклонения от сущности или объема общей концепции Заявителя изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНЫЙ СНЕГОХОДНЫЙ КОМПЛЕКС ЛЕГКОГО КЛАССА "МЕТЕЛИЦА" | 2010 |
|
RU2440269C2 |
| СИСТЕМА УПРАВЛЕНИЯ АВТОМОБИЛЕМ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2012 |
|
RU2575331C2 |
| ПРИЦЕПНОЕ УСТРОЙСТВО ДЛЯ ПОДГОТОВКИ ЛЫЖНЫХ ТРАСС | 2013 |
|
RU2549718C1 |
| Снегоход | 2018 |
|
RU2765071C2 |
| СНЕГОХОД | 2013 |
|
RU2719265C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2636249C2 |
| АВТОМОБИЛЬНАЯ СИСТЕМА РЕКОМЕНДАЦИЙ ДЛЯ ВОДИТЕЛЯ | 2012 |
|
RU2599593C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ | 2020 |
|
RU2744524C1 |
| МЕХАНИЗМ РЕГУЛИРОВКИ НАГРУЗКИ ПОДВЕСКИ СНЕГОХОДА | 2010 |
|
RU2547500C2 |
| СПОСОБ (ВАРИАНТЫ ) ЭКСПЛУАТАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2660235C2 |
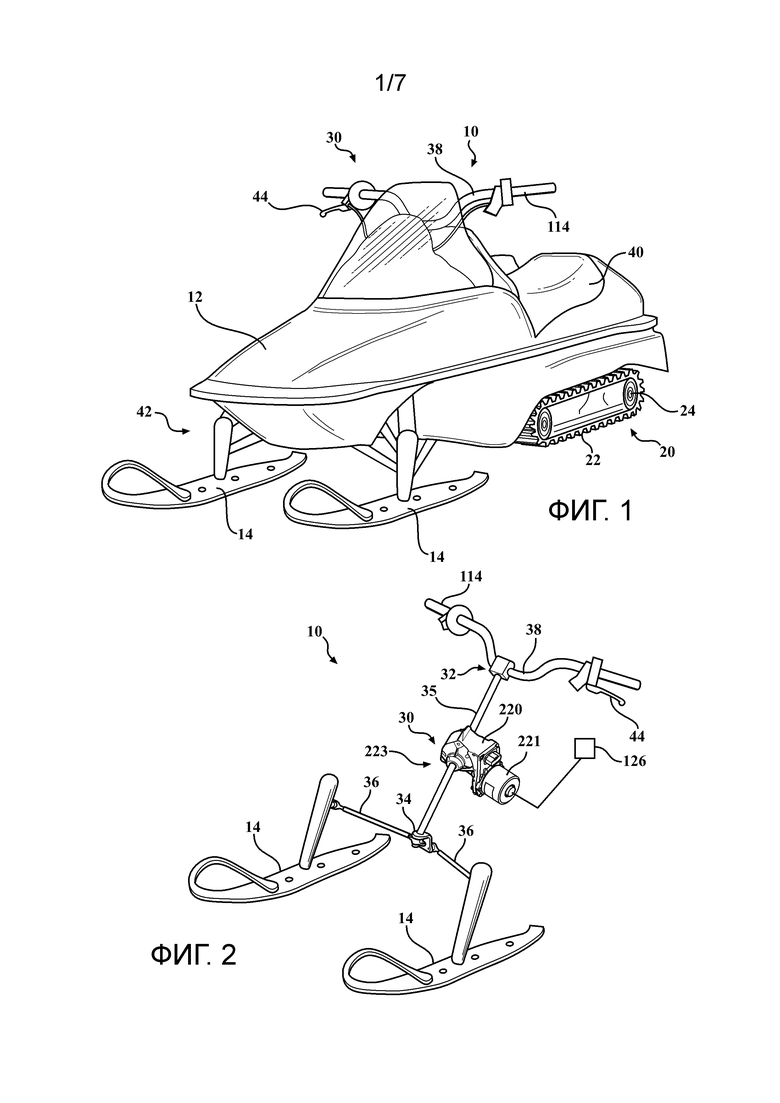
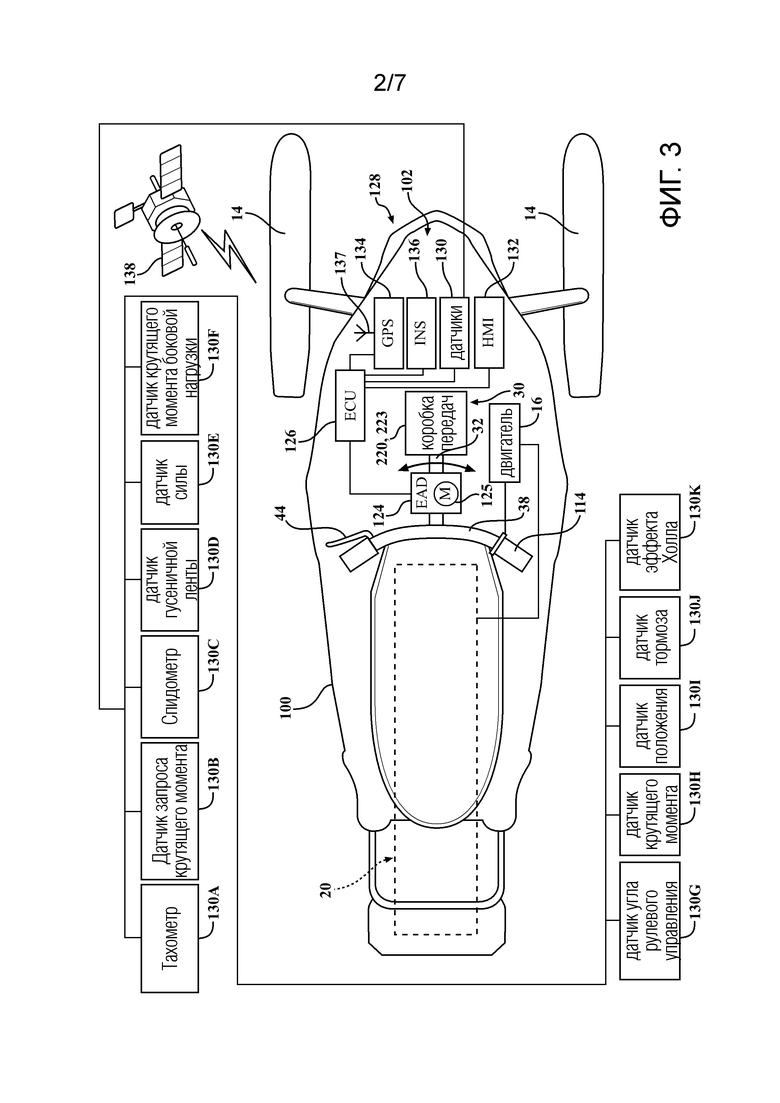
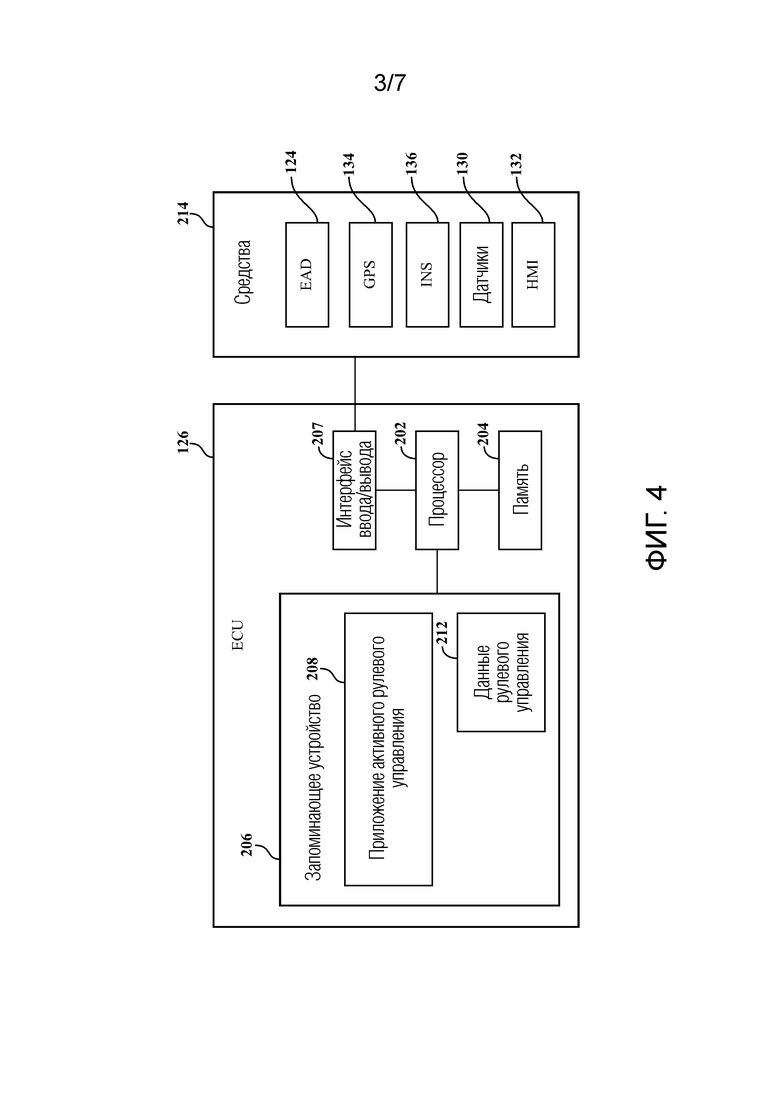
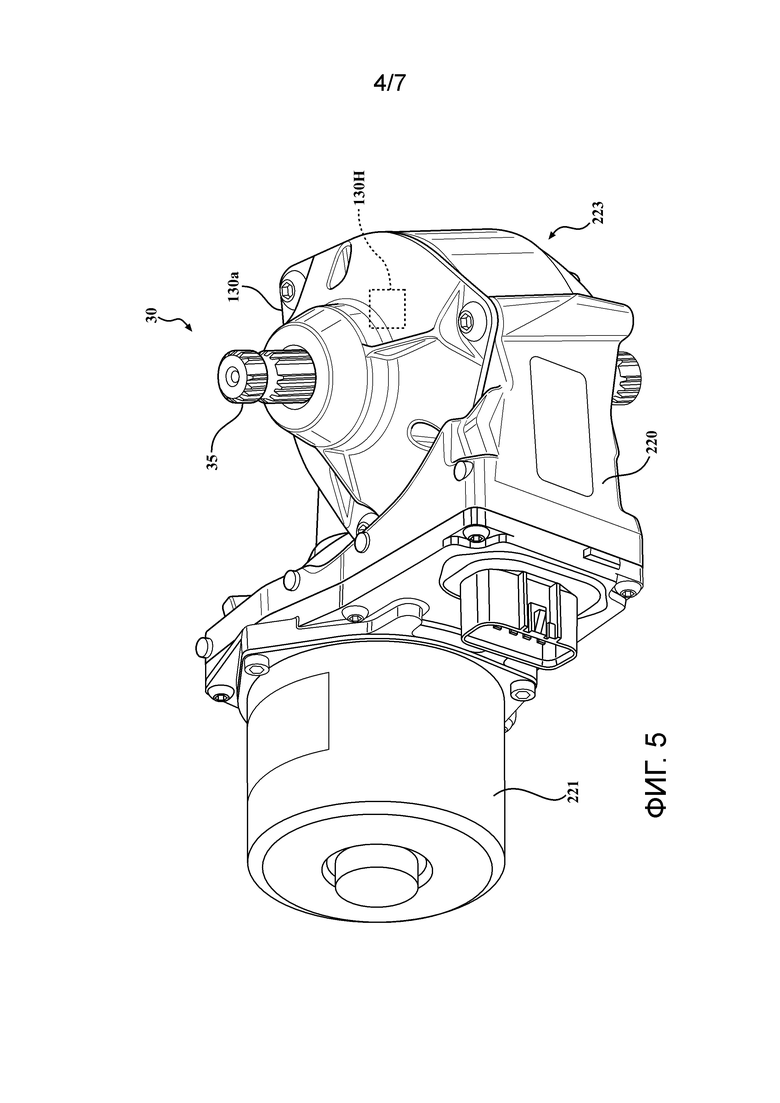
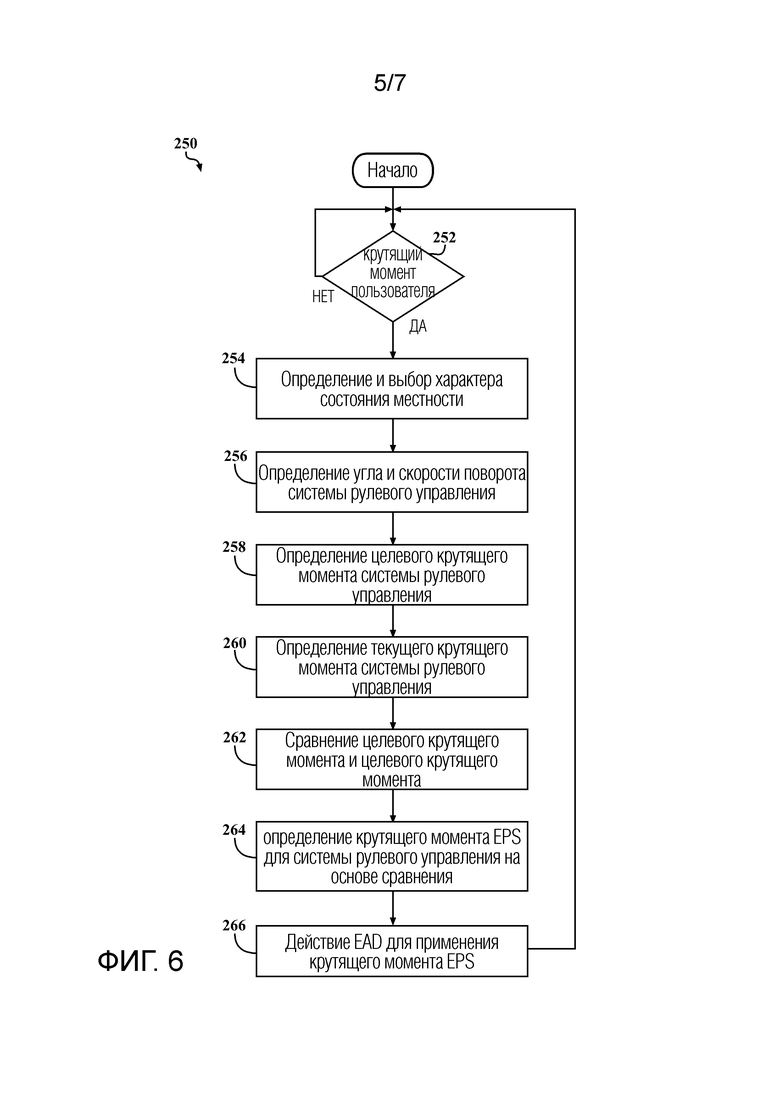
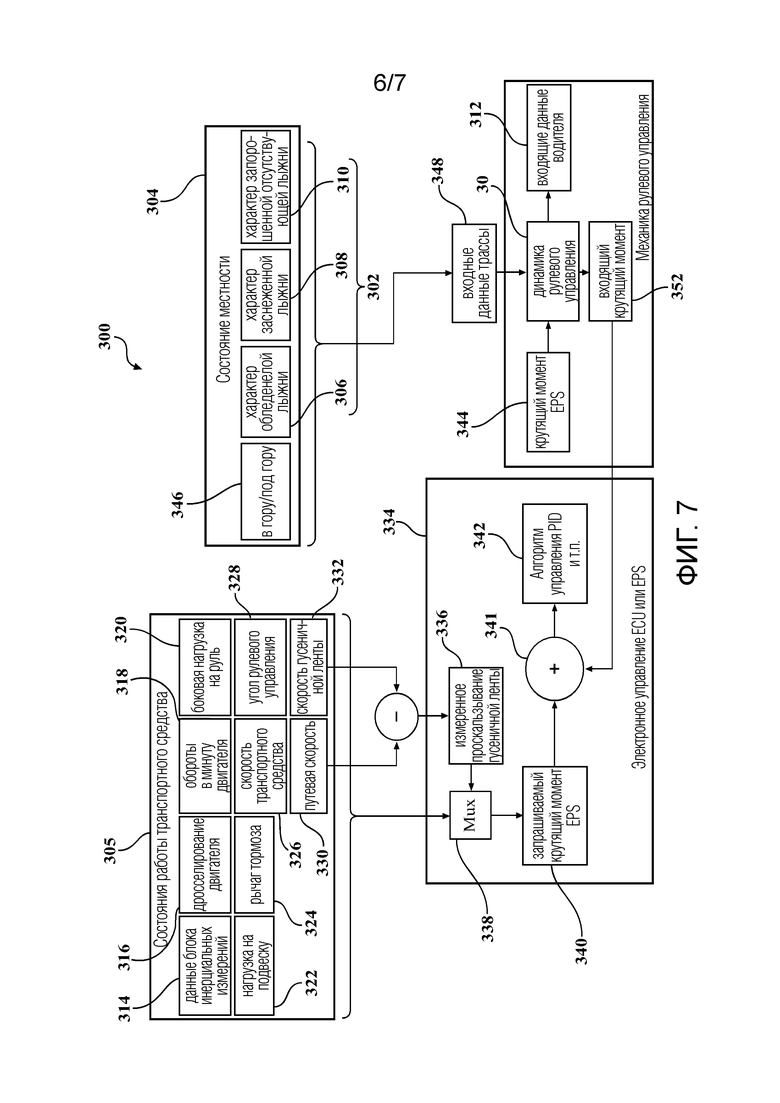
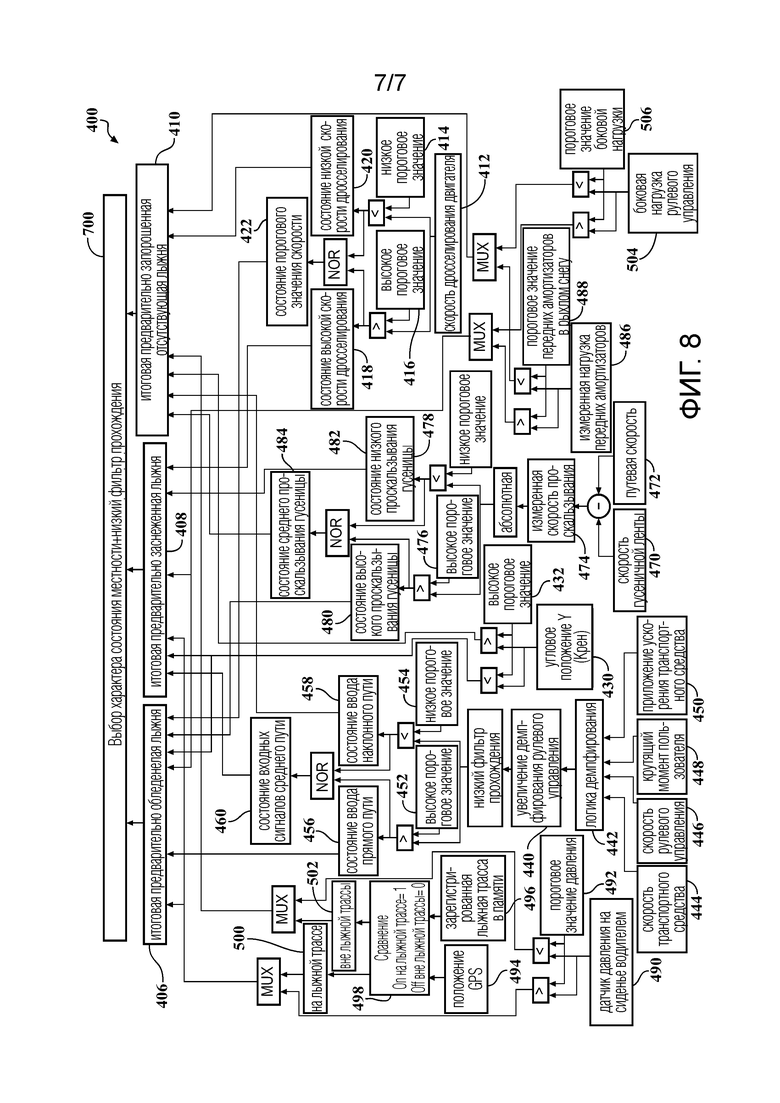
Группа изобретений относится к системам управления движением для улучшения управления рулевого управления снегоходов. Система имеет элемент рулевого управления для регулировки угла, дроссель, электроприводное устройство для приложения крутящего момента к системе рулевого управления, множество датчиков для генерирования данных о состоянии местности, контроллер. Контроллер выполнен с возможностью выбора характера состояния местности, определения крутящего момента в зависимости от угла и скорости поворота руля и управления электроприводным устройством руля. Снегоход содержит кузов, двигатель, гусеничное приводное устройство, элемент зацепления с землей, систему рулевого управления, дроссельную заслонку, систему управления движением. Предложен также способ улучшения рулевого управления снегохода. Достигается повышение устойчивости руля. 3 н. и 21 з.п. ф-лы, 8 ил.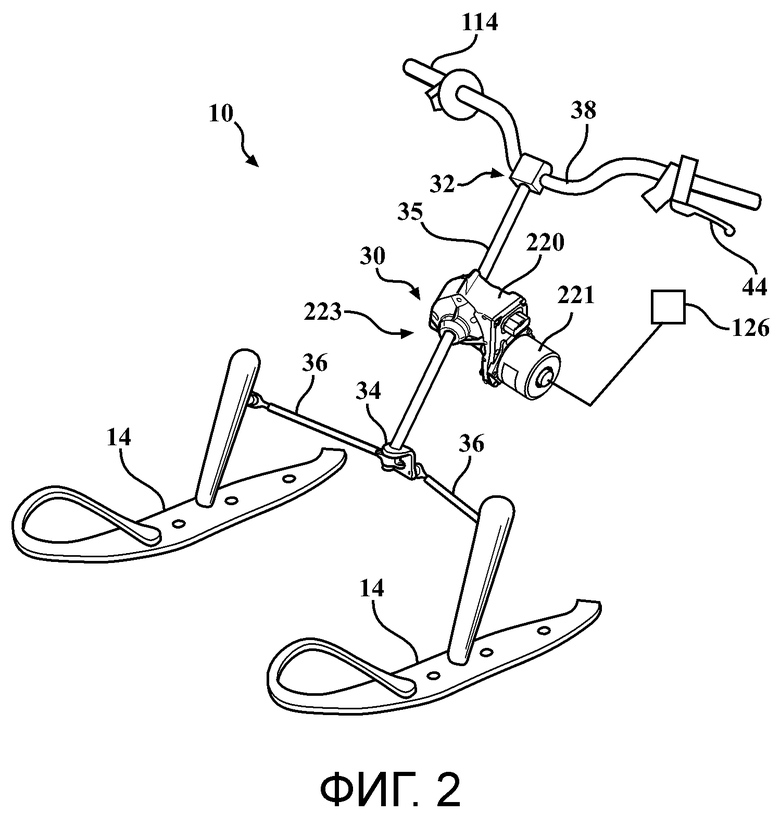
1. Система управления движением для улучшения рулевого управления снегохода, при этом снегоход имеет кузов транспортного средства, включающий двигатель, расположенный в кузове транспортного средства, гусеничное приводное устройство, соединенное с двигателем, причем гусеничное приводное устройство включает гусеничную ленту для расположения на местности, и по меньшей мере один элемент зацепления с землей, расположенный на нижней стороне кузова транспортного средства и предназначенный для расположения на местности, при этом система управления движением содержит:
систему рулевого управления, имеющую управляемый пользователем элемент рулевого управления для регулировки угла по меньшей мере одного элемента зацепления с землей относительно продольной оси снегохода;
дроссель, установленный на управляемом пользователем элементе рулевого управления и приспособленный для соединения с двигателем для регулировки работы двигателя для приведения в действие гусеничного приводного устройства для вращения гусеничной ленты для движения снегохода по местности;
электроприводное устройство, соединенное с системой рулевого управления для приложения крутящего момента к системе рулевого управления;
множество датчиков для генерирования данных о состоянии местности на местности и для генерирования рабочих данных снегохода, при этом указанное множество датчиков содержит датчик крутящего момента для генерирования части рабочих данных снегохода и по меньшей мере один дополнительный датчик, и
по меньшей мере один контроллер, связанный с электроприводным устройством и датчиками, при этом по меньшей мере один контроллер выполнен с возможностью:
выбора характера состояния местности, используя генерированные данные состояния местности и генерированные рабочие данные, причем характер состояния местности выбирается из характера обледенелой лыжни, характера заснеженной лыжни и характера запорошенной отсутствующей лыжни;
определения крутящего момента для приложения к системе рулевого управления в зависимости от угла и скорости поворота управляемого пользователем элемента рулевого управления, посредством использования выбранного характера состояния местности и генерированных рабочих данных; и
управления электроприводным устройством для приложения крутящего момента к системе рулевого управления для обеспечения улучшенного рулевого управления снегохода в зависимости от угла и скорости поворота управляемого пользователем элемента рулевого управления, при этом крутящий момент прилагается только электроприводным устройством.
2. Система управления движением по п. 1, в которой по меньшей мере один контроллер выполнен с возможностью управления электроприводным устройством для приложения крутящего момента к системе рулевого управления во время поворота управляемого пользователем элемента рулевого управления в направлении, противоположном повороту управляемого пользователем элемента рулевого управления.
3. Система управления движением по п. 1, в которой по меньшей мере один дополнительный датчик выбран из группы, состоящей из тахометра, датчика запроса крутящего момента, спидометра, датчика гусеничной ленты, датчика силы, датчика крутящего момента боковой нагрузки, датчика угла рулевого управления, датчика положения, датчика тормоза, датчика эффекта Холла, модуля глобальной навигационной спутниковой системы и модуля инерциальной навигационной системы.
4. Система управления движением по п. 1, в которой по меньшей мере один контроллер выполнен с возможностью определения крутящего момента для приложения к системе рулевого управления в зависимости от угла и скорости поворота элемента рулевого управления, управляемого пользователем, посредством:
использования выбранного характера состояния местности и генерированных рабочих данных для определения текущего крутящего момента системы рулевого управления в зависимости от угла и скорости поворота элемента рулевого управления, управляемого пользователем;
использования выбранного характера состояния местности и генерированных рабочих данных для вычисления целевого крутящего момента для системы рулевого управления в зависимости от угла и скорости поворота элемента рулевого управления, управляемого пользователем; а также
приведения в действие электроприводного устройства для регулирования крутящего момента, прикладываемого к системе рулевого управления, в зависимости от угла и скорости поворота управляемого пользователем элемента рулевого управления от определенного текущего крутящего момента до расчетного целевого крутящего момента.
5. Система управления движением по п. 4, в которой по меньшей мере один контроллер выполнен с возможностью вычисления целевого крутящего момента из значения оборотов двигателя, значения запроса крутящего момента двигателя и определенной текущей скорости снегохода на местности.
6. Система управления движением по п. 4, в которой целевой крутящий момент является центрирующим крутящим моментом.
7. Система управления движением по п. 1, в которой по меньшей мере один контроллер реализует контур обратной связи, который регулирует крутящий момент, прикладываемый к системе рулевого управления, на основе обновлений выбранного характера состояния местности, а также угла и скорости поворота управляемого пользователем элемента рулевого управления во времени.
8. Система управления движением по п. 1, в которой управляемый пользователем элемент рулевого управления содержит ручку.
9. Система управления движением по п. 1, в которой по меньшей мере один контроллер выполнен с возможностью определения состояния подъема, нейтрального состояния или состояния спуска снегохода на местности и изменения относительной степени крутящего момента, прикладываемого к системе рулевого управления, на основе определенного состояния подъема или на основе определенного состояния спуска.
10. Система управления движением по п. 3, в которой по меньшей мере один дополнительный датчик содержит датчик запроса крутящего момента и модуль инерциальной навигационной системы и в которой контроллер выполнен с возможностью выбора характера состояния местности посредством:
(a) использования датчика запроса крутящего момента для определения относительной скорости дросселирования дроссельной заслонки;
(b) использования модуля инерциальной навигационной системы для определения относительной степени крена снегохода;
(c) использования по меньшей мере датчика крутящего момента для определения относительной степени увеличения демпфирования рулевого управления для снегохода;
(d) использования контроллера для выбора предварительного характера состояния местности для каждой из определенной относительной скорости дросселирования и определенной относительной степени крена транспортного средства, а также определенной относительной степени отклонения на местности от частей (а)-(с), при этом выбранный предварительный характер состояния местности выбирается из предварительного характера состояния местности с заснеженной лыжней, предварительного характера состояния местности с запорошенной отсутствующей лыжней и предварительного характера состояния местности с обледенелой лыжней;
(e) использования контроллера для сравнения выбранных предварительных характеров состояния местности для каждой из определенной относительной скорости дросселирования, определенной относительной степени крена транспортного средства и определенной относительной степени увеличения демпфирования рулевого управления для снегохода в части (d);
(f) использования контроллера для выбора характера состояния местности из сравнения выбранных предварительных характеров состояния местности в части (е).
11. Система управления движением по п. 10, в которой по меньшей мере один контроллер выполнен с возможностью:
выбора предварительного характера состояния местности с заснеженной лыжней для части (а), когда определенная относительная скорость дросселирования превышает заранее определенную высокую пороговую скорость дросселирования;
выбора предварительного характера состояния местности с запорошенной отсутствующей лыжней для части (а), когда определенная относительная скорость дросселирования дроссельной заслонки ниже заранее определенной нижней пороговой скорости дросселирования; или
выбора предварительного характера состояния местности с обледенелой лыжней для части (а), когда определенная относительная скорость дросселирования дроссельной заслонки находится между заранее определенной высокой пороговой скоростью дросселирования и заранее определенной низкой пороговой скоростью дросселирования.
12. Система управления движением по п. 10, в которой по меньшей мере один контроллер выполнен с возможностью:
выбора предварительного характера состояния местности с запорошенной отсутствующей лыжней для части (b), когда определенная относительная степень крена транспортного средства превышает заданную величину крена транспортного средства в угловом положении у; или
выбора предварительного характера состояния местности с заснеженной лыжней для части (b), когда определенная относительная степень крена транспортного равна или ниже заданной величины крена транспортного средства в угловом положении у.
13. Система управления движением по п. 10, в которой по меньшей мере один контроллер выполнен с возможностью:
выбора предварительного характера состояния местности с обледенелой лыжней для части (с), когда определенное увеличение демпфирования рулевого управления превышает заранее определенное высокое пороговое значение увеличения демпфирования рулевого управления;
выбора предварительного характера состояния местности с запорошенной отсутствующей лыжней для части (с), когда определенное увеличение демпфирования рулевого управления ниже определенного низкого порогового значения увеличения демпфирования рулевого управления; или
выбора предварительного характера состояния местности с заснеженной лыжней для части (с), когда определенное увеличение демпфирования рулевого управления находится между заранее определенным высоким пороговым значением увеличения демпфирования рулевого управления и заранее определенным низким пороговым значением увеличения демпфирования рулевого управления.
14. Система управления движением по п. 3, в которой по меньшей мере один дополнительный датчик содержит датчик запроса крутящего момента и модуль инерциальной навигационной системы и в которой контроллер выбирает характер состояния местности посредством:
(a) использования датчика запроса крутящего момента для определения относительной скорости дросселирования дроссельной заслонки;
(b) использования модуля инерциальной навигационной системы для определения относительной степени крена снегохода;
(c) использования по меньшей мере датчика крутящего момента для определения относительной степени увеличения демпфирования рулевого управления для снегохода;
(d) использования спидометра или модуля спутниковой глобальной навигационной системы или как спидометра, так и модуля глобальной навигационной спутниковой системы для определения относительной степени проскальзывания гусеницы между гусеничной лентой и местностью;
(e) использования датчика положения для определения относительной степени нагрузки, приложенной к амортизатору, соединенному по меньшей мере с одним элементом зацепления с землей;
(f) использования датчика силы для определения силы, приложенной к сиденью, соединенному с кузовом транспортного средства, от пользователя;
(g) использования модуля глобальной навигационной спутниковой системы для определения относительного местоположения снегохода на местности;
(h) использования датчика крутящего момента боковой нагрузки для определения относительной степени боковой нагрузки рулевого управления;
(i) использования контроллера для выбора предварительного характера состояния местности для каждой из определенной относительной скорости дросселирования и определенной относительной степени крена транспортного средства, определенной относительной степени увеличения демпфирования рулевого управления для снегохода, определенной относительной степени скольжения гусеницы между гусеничной лентой и местностью, определенной относительной степенью нагрузки, приложенной к амортизатору, соединенному по меньшей мере с одним элементом зацепления с землей, определенной силы, приложенной к сиденью, соединенному с кузовом транспортного средства, от пользователя, определенному относительному расположению снегохода на местности и определенной относительной степени боковой нагрузки рулевого управления частей (a)-(h), при этом выбранный предварительный характер состояния местности выбирается из предварительного характера состояния местности с заснеженной лыжней, предварительного характера состояния местности с запорошенной отсутствующей лыжней и предварительным характером состояния местности с обледенелой лыжней; а также
(j) выбора характера состояния местности на основе сравнения выбранных предварительных характеров состояния местности части (i).
15. Система управления движением по п. 14, в которой по меньшей мере один контроллер выполнен с возможностью:
выбора предварительного характера состояния местности с заснеженной лыжней для части (а), когда определенная относительная скорость дросселирования превышает заранее определенную высокую пороговую скорость дросселирования;
выбора предварительного характера состояния местности с запорошенной отсутствующей лыжней для части (а), когда определенная относительная скорость дросселирования дроссельной заслонки ниже заранее определенной нижней пороговой скорости дросселирования; или
выбора предварительного характера состояния местности с обледенелой лыжней для части (а), когда определенная относительная скорость дросселирования дроссельной заслонки находится между заранее определенной высокой пороговой скоростью дросселирования и заранее определенной низкой пороговой скоростью дросселирования.
16. Система управления движением по п. 14, в которой по меньшей мере один контроллер выполнен с возможностью:
выбора предварительного характера состояния местности с запорошенной отсутствующей лыжней для части (b), когда определенная относительная степень крена транспортного средства превышает заданную величину крена транспортного средства в угловом положении у; или
выбора предварительного характера состояния местности с заснеженной лыжней для части (b), когда определенная относительная степень крена транспортного равна или ниже заданной величины крена транспортного средства в угловом положении у.
17. Система управления движением по п. 14, в которой по меньшей мере один контроллер выполнен с возможностью:
выбора предварительного характера состояния местности с обледенелой лыжней для части (с), когда определенное увеличение демпфирования рулевого управления превышает заранее определенное высокое пороговое значение увеличения демпфирования рулевого управления;
выбора предварительного характера состояния местности с запорошенной отсутствующей лыжней для части (с), когда определенное увеличение демпфирования рулевого управления ниже определенного низкого порогового значения увеличения демпфирования рулевого управления; или
выбора предварительного характера состояния местности с заснеженной лыжней для части (с), когда определенное увеличение демпфирования рулевого управления находится между заранее определенным высоким пороговым значением увеличения демпфирования рулевого управления и заранее определенным низким пороговым значением увеличения демпфирования рулевого управления.
18. Система управления движением по п. 14, в которой по меньшей мере один контроллер выполнен с возможностью:
выбора предварительного характера состояния местности с обледенелой лыжней для части (d), когда определенная относительная величина проскальзывания гусеницы превышает заранее определенную высокую пороговую относительную величину проскальзывания гусеницы;
выбора предварительного характера состояния местности с заснеженной лыжней для части (d), когда определенная относительная величина проскальзывания гусеницы ниже заранее определенной низкой пороговой относительной величины проскальзывания гусеницы; или
выбора предварительного характера состояния местности с запорошенной отсутствующей лыжней для части (d), когда определенная относительная величина проскальзывания гусеницы находится между заранее определенной высокой пороговой относительной величиной проскальзывания гусеницы и заранее определенной низкой пороговой относительной величиной проскальзывания гусеницы.
19. Система управления движением по п. 14, в которой по меньшей мере один контроллер выполнен с возможностью:
в равной степени выбора предварительного характера состояния местности с обледенелой лыжней и предварительного характера состояния местности с заснеженной лыжней для части (е), когда определенная относительная степень нагрузки, приложенной к амортизатору, превышает заранее определенную высокую пороговую относительную степень нагрузки, приложенной к амортизатору; или
выбора предварительного характера состояния местности с запорошенной отсутствующей лыжней для части (е), когда определенная относительная степень нагрузки, приложенной к амортизатору, равна или ниже заранее определенной высокой пороговой относительной степени нагрузки, приложенной к амортизатору.
20. Система управления движением по п. 14, в которой по меньшей мере один контроллер выполнен с возможностью:
в равной степени выбора предварительного характера состояния местности с обледенелой лыжней и предварительного характера состояния местности с заснеженной лыжней для части (f), когда определенная относительная степень усилия, приложенного к сиденью, превышает заранее определенную высокую пороговую относительную степень усилия, приложенного к сиденью; или
выбора предварительного характера состояния местности с запорошенной отсутствующей лыжней для части (f), когда определенная относительная степень усилия, приложенного к сиденью, равна или ниже заранее определенной высокой пороговой относительной степени усилия, приложенного к сиденью.
21. Система управления движением по п. 14, в которой по меньшей мере один контроллер выполнен с возможностью:
в равной степени выбора предварительного характера состояния местности с обледенелой лыжней и предварительного характера состояния местности с заснеженной лыжней для части (g), когда определенное относительное положение снегохода находится на одной из известных лыжных трасс из множества известных лыжных трасс; или
выбора предварительного характера состояния местности с запорошенной отсутствующей лыжней для части (g), когда определенное относительное положение снегохода не находится на одной из известных лыжных трасс из множества известных лыжных трасс.
22. Система управления движением по п. 14, в которой по меньшей мере один контроллер выполнен с возможностью:
в равной степени выбора предварительного характера состояния местности с обледенелой лыжней и предварительного характера состояния местности с заснеженной лыжней для части (h), когда определенная боковая нагрузка рулевого управления снегохода превышает заранее определенную высокую пороговую боковую нагрузку рулевого управления снегохода; или
выбора предварительного характера состояния местности с запорошенной отсутствующей лыжней для части (h), когда определенная боковая нагрузка рулевого управления снегохода равна или ниже заранее определенной низкой пороговой боковой нагрузки рулевого управления снегохода
23. Снегоход для использования при движении по местности, при этом указанный снегоход содержит:
кузов транспортного средства,
двигатель, расположенный в кузове транспортного средства;
гусеничное приводное устройство, соединенное с двигателем, при этом гусеничное приводное устройство включает гусеничную ленту, адаптированную для позиционирования на местности;
по меньшей мере один элемент зацепления с землей, расположенный по меньшей мере на нижней стороне кузова транспортного средства и адаптированный для позиционирования на местности;
систему рулевого управления, имеющую управляемый пользователем элемент рулевого управления для регулировки угла поворота по меньшей мере одного элемента зацепления с землей относительно продольной оси снегохода;
дроссельную заслонку, установленную на управляемом пользователем рулевом элементе и соединенную с двигателем для регулировки работы двигателя, чтобы приводить в действие гусеничное приводное устройство для вращения гусеничной ленты для движения снегохода по местности; и
систему управления движением, соединенную с системой рулевого управления, при этом система управления движением является системой по п. 1.
24. Способ улучшения рулевого управления снегохода, при этом снегоход имеет кузов транспортного средства, включающий в себя двигатель, расположенный в кузове транспортного средства; гусеничное приводное устройство, соединенное с двигателем, причем гусеничное приводное устройство включает гусеничную ленту, расположенную на местности; по меньшей мере один элемент зацепления с землей, расположенный на нижней стороне кузова транспортного средства и расположенный на местности; систему рулевого управления, имеющую управляемый пользователем элемент рулевого управления для регулировки угла поворота по меньшей мере одного элемента зацепления с землей относительно продольной оси снегохода; дроссельную заслонку, установленную на управляемом пользователем элементе рулевого управления и соединенную с двигателем для регулировки работы двигателя для приведения в действие гусеничного приводного устройства для вращения гусеничной ленты для движения снегохода по местности; и множество датчиков для генерирования данных о состоянии местности и для генерирования рабочих данных снегохода, при этом указанное множество датчиков содержит датчик крутящего момента для генерирования части рабочих данных снегохода и по меньшей мере один дополнительный датчик; при этом способ включает этапы, при которых:
определяют характер состояния местности на основе генерированных данных состояния местности и генерированных рабочих данных, при этом характер состояния местности выбирается из характера обледенелой лыжной трассы, характера заснеженной лыжной трассы и характера запорошенной отсутствующей лыжной трассы;
получают поворот управляемого пользователем элемента рулевого управления;
определяют крутящий момент для приложения к системе рулевого управления в ответ на угол и скорость принятого поворота управляемого пользователем элемента рулевого управления с использованием выбранного характера состояния местности и генерированных рабочих данных; а также
управляют электроприводным устройством для приложения крутящего момента к системе рулевого управления для обеспечения улучшенного управления рулевым управлением снегохода в зависимости от угла и скорости поворота управляемого пользователем элемента рулевого управления, при этом крутящий момент прилагается только электроприводным устройством.
| DE 102015200005 A1, 07.07.2016 | |||
| US 7690569 B2, 06.04.2010 | |||
| МОДУЛЬ УПРАВЛЕНИЯ ДРОССЕЛЕМ И ТРАНСПОРТНОЕ СРЕДСТВО | 2013 |
|
RU2646029C2 |

