Изобретение относится к области судостроения.
Активный скуловой стабилизатор качки судна предназначен для успокоения качки судна и наиболее актуален для судов с малыми моментами инерции площади действующей ватерлинии и, соответственно, с большими собственными периодами качки, для которых он сможет компенсировать постоянные углы крена под действием ветра или центробежных эффектов на циркуляции, исправить ходовой дифферент и предотвратить зарываемость под встречную штормовую волну.
Предлагаемое изобретение может выполнять функции успокоителя качки на ходу или без хода судна и предназначено для работы в качестве вспомогательного движителя, обеспечивающего импульсную тягу в режимах маховых движений в фазе крыла со струйными потоками вблизи бортовой обшивки судна. Вспомогательный движитель способен создавать относительно небольшую тягу в безымпульсном режиме.
Известен успокоитель качки судна [1], который состоит из жестких крыльев-стабилизаторов, расположенных на корпусе судна по бортам и соединенных сообщающимися сосудами. Крылья стабилизаторы синхронно раскрываются при всплытии и закрываются при погружении под воду. Однако при срыве потока с кромки крыла образуются вихри, что снижает скорость движения судна.
Известен активный стабилизатор килевой и бортовой качки корабля - штормовой аварийный движитель [2], в котором два управляемых крыла установлены на горизонтальных или наклонных баллерах в кормовой части корпуса судна под прямым воздействием потока жидкости от работающих гребных винтов. Однако при срыве потока жидкости с задних кромок крыльев образуются вихри, которые снижают коэффициент полезного действия устройства (КПД).
Наиболее близким к заявляемому изобретению по технической сущности является корабль с плавниковым движителем [3]. Описанное устройство принято за прототип изобретения. Движителем этого корабля является плавник, состоящий из последовательности гибких полосовых поверхностей с жесткими ребрами, выполняющими перемещения в цепной сцепке. Недостатком данного устройства является низкий КПД, обусловленный образованием вихрей на задней кромке полосовых поверхностей.
Техническим результатом предлагаемого изобретения является создание активного успокоителя качки судна, который можно использовать в качестве вспомогательного движителя судна и в котором для повышения КПД компенсируются вихри, образующиеся на концевой кромке лопастей крыльев-плавников.
Преимуществами предлагаемого изобретения является использование гибких крыльев-плавников, что повышает их прочность при воздействии морских волн, а также опережающего движения крыльев-плавников, которое компенсирует отрыв потока жидкости с кромки крыла и снижает негативное воздействие стабилизатора качки на скорость хода судна.
Технический результат достигается путем объединения передней и концевой кромки лопасти крыла-плавника с помощью жесткого ребра, за которым следуют внутренние ребра со сглаженными перепонками или специально армированная гибкая поверхность.
Сущность изобретения заключается в том, что жесткое ребро создает необходимый опережающий изгиб плавника навстречу маховому развороту лопасти. Локальные фрагменты лопасти крыла-плавника скользят относительно завихренных потоков жидкости по предопределенной кинематической схеме, компенсируя тем самым образование вихрей на концевой кромке крыла-плавника.
В исходном положении лопасть крыла-плавника может быть прижата к судовой обшивке, то есть исключена из текущих гидродинамических процессов у борта судна. В начальный фазе, при отвороте крыла-плавника от корпуса, отдаляется ребро передней кромки с небольшим запаздыванием концевого фрагмента, отчего образуется раскрывающаяся полость, в которую устремляется поток воды, создавая начальный импульс тяги.
В следующий момент передняя кромка отклоняется с опережением основной лопасти крыла-плавника, отчего на концевом участке лопасти создается закручивание потока навстречу образующемуся индуктивному срыву потока. Вращение всей лопасти плавника относительно неподвижной точки на обшивке корпуса допускает лишь частичную взаимную компенсацию спутного и индуктивного вихреобразования, что снижает эффективность работы активного скулового стабилизатора качки судна в режиме вспомогательного движителя на удалении от бортовой обшивки. В момент прохождения фазы ротора в конечном положении крыла на удалении от корпуса судна, поверхность крыла-плавника в распрямленном состоянии теряет скольжение и получает максимальную скорость изгиба, и в тот момент происходит полная компенсация спутного вихря из фазы крыла в среднем положении, и на новую четверть фазы махового движения крыла-плавника образуется компенсирующий направленный в противоположную сторону вихрь.
После изменения знака угла скольжения передняя кромка лопасти приближается к судовой обшивке, концевой фрагмент также симметрично опережает среднюю часть лопасти, из образующейся полости происходит выброс реактивной струи, догоняющей и вступающей во взаимодействие с зарождающимся на концевой кромке спутным вихрем, который трансформируется в поступательный поток жидкости, что служит признаком повышения эффективности вспомогательного движителя в целом.
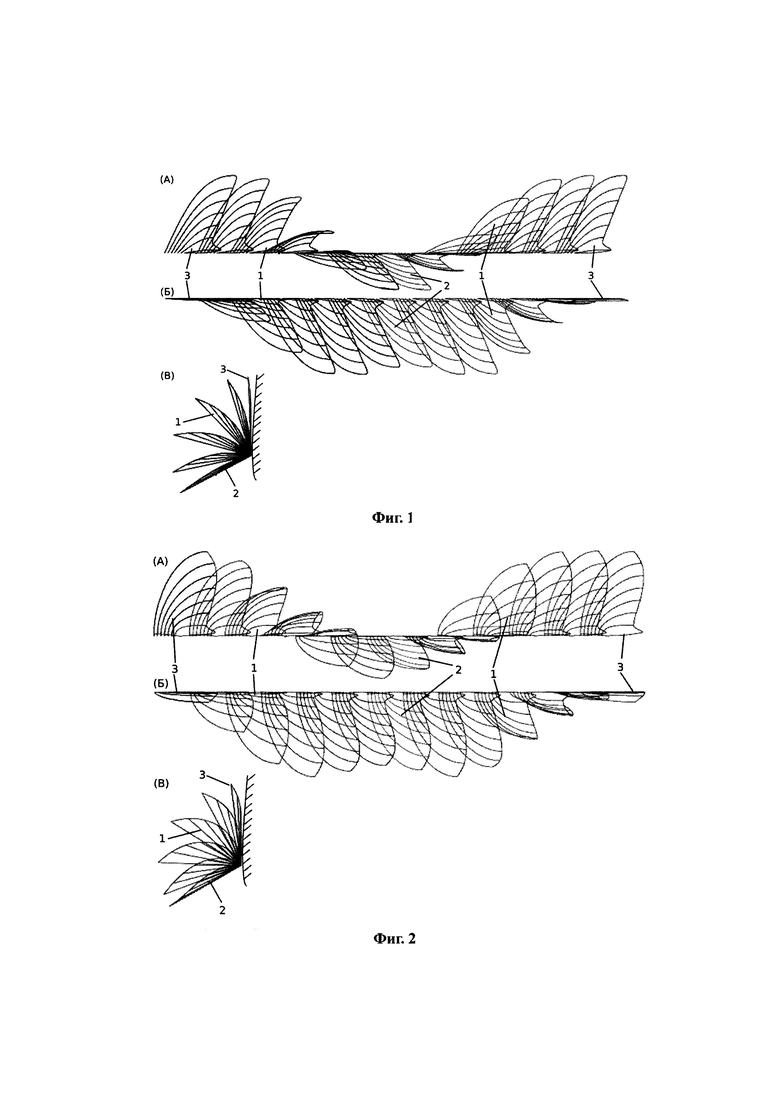
Сущность изобретения поясняется на Фиг. 1 и Фиг. 2. На Фиг. 1 изображен чертеж 13 фаз крыла-плавника активного скулового стабилизатора качки судна с малыми углами атаки в проекции вид сбоку (А), и проекции вид сверху (Б) и проекции вид спереди (В). На Фиг. 2 изображен чертеж 13 фаз крыла-плавника активного скулового стабилизатора качки судна с большими углами атаки в проекции вид сбоку (А), вид сверху (Б) и вид спереди (В).
1 - среднее положение крыла-плавника с максимальной скоростью маховых перемещений. В среднем положении лопасть крыла-плавника получает максимальный изгиб, при котором происходит встречное закручивание потока для компенсации индуктивного, а затем и спутного вихреобразования.
2 - крайнее положение полного распрямления крыла-плавника. На удалении от корпуса по синусоидальной траектории локальные отсчеты углов скольжения по лопасти крыла-плавника становятся нулевыми, поэтому полезная тяга или торможение на движителе также прекращают действие. При этом важно, чтобы кинематика трансформации лопасти обеспечивала полное гашение индуктивного и спутного вихреобразования, что даст возможность временной фиксации лопасти в крайнем положении, при котором остаточный угол поворота распрямленной лопасти послужит активной стабилизации корпуса по крену и дифференту корабля.
3 - крайнее положение крыла-плавника вблизи корпуса корабля. В крайнем положении вблизи корпуса корабля лопасть крыла-плавника вступает в интенсивное силовое взаимодействие с обшивкой, как с ограничивающей поверхностью. В отличие от положения полного распрямления, неподвижные корневые фрагменты лопасти не могут участвовать в компенсационном закручивании потока, и потому в нестационарном маховом движении крыла-плавника может быть полезным процесс порождения свободного спутного вихря, динамически смещаемого к средней части лопасти с помощью симметричного динамического изгиба концевого фрагмента крыла-плавника. Этот же изгиб позволяет образовывать клиновидную полость вблизи обшивки корпуса, из которой производится реактивный выброс жидкости, вступающей во взаимодействие со встречным потоком вблизи обшивки корпуса из новообразующегося свободного спутного вихря. Таким образом, происходит усиление полезного упорного импульса, и свободный спутный вихрь отчасти трансформируется в поступательный поток в следе за движителем, что также послужит свидетельством повышенной эффективности машущего плавникового движителя. Вблизи корпуса крыло-плавник приостанавливается, и он не будет сказываться на увеличении сопротивления воды в движении корабля по инерции. Отход крыла-плавника от корпуса осуществляется максимально быстро, ограничивающим критерием скорости будет служить контроль и предотвращение вихревого или кавитационного разрыва сплошности жидкости при возникновении отрицательных давлений на поверхности машущей лопасти крыла-плавника. Затягивание жидкости под крыло-плавник представляется таким же струйным потоком с интенсивным вихреобразованием на его границе с невозмущенной жидкостью. Одновременно с удалением крыла-плавника от корпуса начинается изгиб лопасти навстречу маховому движению, при этом закручивание потока происходит в сторону усиления вихря от затягиваемого под крыло-плавник потока. Это позволяет воссоздавать некий противовихрь для спутной пелены и индуктивного срыва потока на передне-концевой кромке лопасти, что требуется для взаимокомпенсации вихреобразования в процессе прохождения среднего положения крыла-плавника, и с переходом в крайнее положение полного распрямления крыла-плавника.
Как видно из чертежей, жесткое ребро создает необходимый опережающий изгиб плавника навстречу маховому развороту лопасти для компенсации образования вихрей на кромке крыла, и для этого не тратится энергия движителя, поскольку жесткое ребро является часть крыла-плавника, а не отдельным механизмом.
Предлагаемое изобретение реализуется с использованием кинематических схем на основе кривошипно-шатунных раскачивающих механизмов. Величина размаха регулируется изменением расстояния оси коленчатого вала до точки крепления ребер крыла-плавника, небольшое изменение направления создаваемого потока возможно с помощью поворота его оси в противоположную сторону, а механическое переключение шага синусоидальных деформаций крыла-плавника может быть выполнено фиксированными переключениями поворотных муфт кривошипа с помощью подбора фазовой скорости и размаха ребер крыла-плавника для полуавтоматического перехода на новые углы жесткого или упругого зацепления.
Использование линейных двигателей в качестве силовых электроприводов позволит оптимизировать работу активного скулового стабилизатора качки судна в качестве вспомогательного движителя в строгом соответствии с предначертанными математическими моделями и с учетом обратных связей для достижения безотрывного обтекания и равномерного распределения силовой нагрузки по всем фрагментам лопасти крыла-плавника. Для линейного привода становится естественной некоторая корректировка углов скольжения в крайних положениях крыла-плавника, что соответствует режиму работы движителя с динамически регулируемым вектором тяги, и что фактически означает его одновременное действие в качестве движителя и активного стабилизатора качки судна.
Оптимизация перемещения машущего крыла производится в два этапа. На первом этапе оптимизируются кинематические параметры перемещений гибкого крыла-плавника для получения необходимого потока с учетом синусоидального шага со скольжением для заданных скоростей судна, включая штормовые и аварийные режимы плавания. На втором этапе оптимизируются параметры изгиба передней кромки и внутренних ребер, скорости, размаха и синусоидального шага плавника, с последующей проработкой вариантов динамического формирования клиновидных полостей вблизи обшивки судна и местных скоростей закручивания потока в концевых фрагментах лопасти крыла-плавника.
Важно отметить необходимость строгого регулирования скорости и угла лопасти плавника в динамике его приближения и отдаления от поверхности судовой обшивки. Нарушение оптимального кинематического режима приведет к кавитационно-вихревым разрывам сплошности жидкости или гидродинамическим ударам при слишком малом зазоре, или к вихревому запиранию набегающего потока и торможению хода судна при медленном или недостаточно близком прохождении лопасти близи обшивки.
Лопасть крыла-плавника в среднем положении получает максимальный изгиб, при котором происходит встречное закручивание потока для компенсации индуктивного, а затем и спутного вихреобразования.
В крайнем положении на удалении от корпуса судна по синусоидальной траектории локальные отсчеты углов скольжения по лопасти крыла-плавника становятся нулевыми, поэтому полезная тяга или торможение также прекращают действие. При этом важно, чтобы кинематика трансформации лопасти обеспечивала полное гашение индуктивного и спутного вихреобразования, что даст возможность временной фиксации лопасти в крайнем положении, при котором остаточный угол поворота распрямленной лопасти послужит активной стабилизации корпуса по крену и дифференту судна.
В крайнем положении вблизи корпуса судна лопасть плавника вступает в интенсивное силовое взаимодействие с обшивкой, как с ограничивающей поверхностью. В отличие от положения на удалении от корпуса, неподвижные корневые фрагменты лопасти не могут участвовать в компенсационном закручивании потока, и потому в нестационарном маховом движении крыла-плавника может быть полезным процесс порождения свободного спутного вихря, динамически смещаемого к средней части лопасти с помощью симметричного динамического изгиба концевого фрагмента крыла-плавника. Этот же изгиб позволит создать клиновидную полость вблизи обшивки корпуса, из которой будет произведен реактивный выброс жидкости, который вступит во взаимодействие со встречным потоком вблизи обшивки корпуса из образующегося свободного спутного вихря. Таким образом произойдет усиление полезного упорного импульса, и свободный спутный вихрь отчасти трансформируется с поступательный поток в следе за крылом-плавником, что также послужит свидетельством повышенной эффективности работы активного скулового стабилизатора качки судна в качестве вспомогательного движителя. Вблизи корпуса крыло-плавник также может быть приостановлено, и он не будет участвовать в движении судна по инерции. Отход крыла-плавника от корпуса должен быть максимально быстрым, ограничивающим критерием может быть предотвращение вихревого или кавитационного разрыва сплошности жидкости при возникновении отрицательного давления. Затягивание жидкости под крыло-плавник представляется таким же струйным потоком с интенсивным вихреобразованием на его границе с невозмущенной жидкостью. Одновременно с удалением крыла-плавника от корпуса начинается изгиб лопасти навстречу маховому движению, при этом закручиванием потока происходит в сторону усиления вихря от затягиваемого под крыло-плавник потока. Таким образом, воссоздается противоположно направленный вихрь для спутной пелены и индуктивного срыва потока на передне-концевой кромке лопасти, что и требуется для полной взаимной компенсации вихреобразования в процессе прохождения среднего положения крыла-плавника, и с переходом в крайнее положение крыла-плавника на удалении от корпуса.
Список использованных источников инофрмации
1. Бураковский П.Е. «Успокоитель качки судна». Патент №2621407.
2. Храмушин В.Н. «Активный стабилизатор килевой и бортовой качки корабля - штормовой аварийный движитель». Патент №2384457.
3. Храмушин В.Н. «Корабль с плавниковым движителем». Патент №2360831.
Изобретение относится к области судостроения, в частности к стабилизаторам качки судна. Активный скуловой стабилизатор качки судна представляет собой серию гибких пластин, объединенных одним жестким ребром, которое создает необходимый опережающий изгиб плавника навстречу маховому развороту лопасти. За жестким ребром передне-концевой кромки следуют внутренние ребра со сглаженными перепонками, участвующие в маховых движениях по предопределенной кинематической схеме с равномерным распределением силовых нагрузок и оптимальным скольжением локальных фрагментов лопасти плавника относительно им же завихренных потоков жидкости. Активный скуловой стабилизатор качки судна также предназначен для работы в качестве вспомогательного движителя, обеспечивающего импульсную тягу в режимах маховых движений в фазе крыла со струйными потоками вблизи бортовой обшивки корабля; движитель способен создавать относительно небольшую тягу в безымпульсном режиме, одновременно исполняя функции активного стабилизатора, в том числе с возможностью работы без хода корабля. Изобретение позволяет достичь более высокого коэффициента полезного действия стабилизатора путем компенсации вихрей, образующихся при срыве потока жидкости с кромки крыла. 2 ил.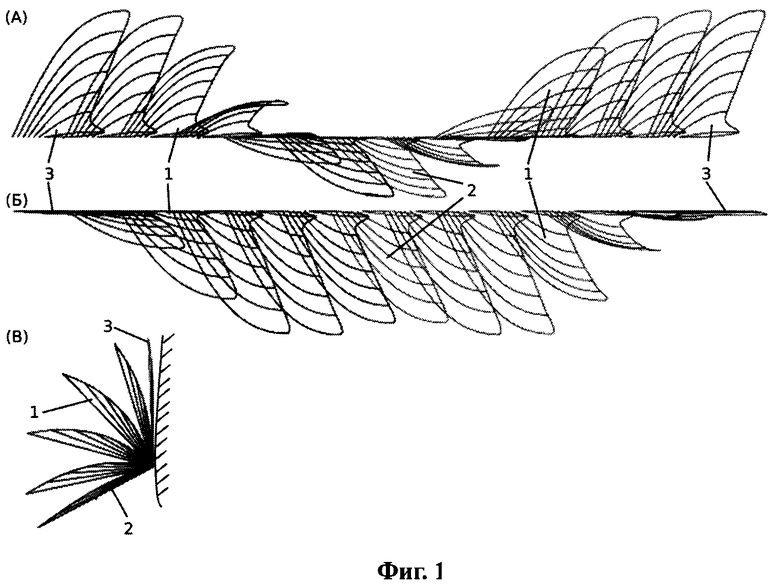
Активный скуловой стабилизатор качки судна, содержащий крылья-плавники, состоящие из последовательности гибких полосовых поверхностей с жесткими ребрами, закрепленных в скуловой части корпуса судна, отличающийся тем, что передняя и концевая кромка лопасти крыла-плавника объединена одним жестким ребром, за которым расположены внутренние ребра со сглаживающими набегающий поток перепонками.
| US 3773011 A, 20.11.1973 | |||
| CN 103895833 A, 02.07.2014 | |||
| КОРАБЛЬ С ПЛАВНИКОВЫМ ДВИЖИТЕЛЕМ | 2007 |
|
RU2360831C2 |
| RU 94022609 A1, 27.08.1996 | |||
| Сепаратор зерносоломистого вороха | 1980 |
|
SU852239A1 |
| АКТИВНЫЙ СТАБИЛИЗАТОР КИЛЕВОЙ И БОРТОВОЙ КАЧКИ КОРАБЛЯ - ШТОРМОВОЙ АВАРИЙНЫЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2384457C2 |
| УСПОКОИТЕЛЬ КАЧКИ СУДНА | 2016 |
|
RU2621407C1 |

