Изобретение относится к области судостроения и науки.
Прототипом предлагаемого изобретения служат известные корабли, оснащенные плавниковыми движителями, принцип действия и устройства которых опубликованы в работах [1-4].
Принцип действия предлагаемого изобретения «Корабль с плавниковым движителем» иллюстрируется кинематической схемой плавникового движителя, изображенного на чертеже.
Плавниковый движитель корабля устроен в виде последовательности гибких полосовых поверхностей с жесткими ребрами, выполняющими вертикальные перемещения в цепной сцепке, задающей углы наклона каждого из жестких ребер по касательной к бегущей синусоиде.
Кинематическая последовательность вертикальных перемещений и сопутствующее изменение формы машущей поверхности симметричного гибкого плавникового движителя (справа-налево), при его движении по синусоидальной траектории в диаметральной плоскости за корпусом судна. В позиции А - плавник работает как крыло, в позиции В - в режиме ротора.
Движитель может быть размещен под кормовым подзором надводного корабля или в хвостовой части подводной лодки.
При использовании динамически корректируемого движения плавникового движителя он одновременно может действовать в качестве руля и успокоителя качки.
При сохранении возможности пассивного поступательного перемещения плавника под действием вертикальной качки корпуса корабля, при котором кинематика поверхности плавника будет жестко соответствовать геометрически установленным для него формам на заданных участках траектории, плавник будет работать в качестве движителя, использующего энергию качки корпуса корабля на волнении, обеспечивая таким образом безопасность штормового маневрирования корабля с остановленными главными двигателями.
Краткое описание чертежей
1. В позиции «А-крыло» - максимальная скорость поперечного изгиба плавника соответствует максимальной скорости вертикальных перемещений и оптимальному углу атаки, достигаемых на средней линии синусоиды. При этом плавник полностью распрямляется, создавая максимальную тягу за счет угла атаки плоского крыла, а его концевая кромка максимально быстро изгибается, создавая два вращательных потока, направленных навстречу гидродинамическим спутным вихрям, срывающимся в этот момент с концевой кромки крыла с наибольшей интенсивностью. Таким образом, происходит компенсация индуктивных потерь, характерных для жесткого крыла, которые в случае крыла короткого удлинения значительно ухудшают его качество.
2. Позиция «В-ротор». В крайних положениях поверхность плавника получает максимальное седловое искривление. Средняя линия плавника ложится на вершину синусоиды, что при поступательном движении в жидкости создает пониженное давление на внешней поверхности крыла. Линия крыла сильно искривлена во внешнюю сторону от ведущей синусоиды, концевые кромки максимально загнуты, и на них действует индуктивный вихрь, зародившийся в момент максимальной скорости махового движения плавника в позиции «А-крыло». Пониженное давление на осевой линии плавника затягивает концевые индуктивные вихри в воде к диаметральной линии крыла. При этом за счет седловидного изгиба поверхности плавника вихревое течение снова преобразуется в поступательное, поддерживающее тягу движителя.
При выходе из крайнего положения «В-ротор» концевые поверхности крыла быстро распрямляются навстречу остаточным индуктивным вихрям, окончательно останавливают их вращение и отталкивают остатки воды по потоку назад. В этот момент плавник вновь переходит к основному маховому движению, и крыло начинает распрямляться, а быстрый изгиб концевых поверхностей плавника снова привносит закрученный поток на концах гибкого крыла, которые компенсируют вновь образующиеся индуктивные вихри в момент распрямления поверхности крыла в среднем положении плавника «А-крыло».
Осуществление изобретения
Для приведения в движение цепной линии плавникового движителя корабля строго по синусоидальному закону применимы различные механизмы:
1 - в виде коленчатого вала внутри корпуса судна, последовательно выдвигающего забортные штоки, между которыми закрепляются связанные в хребет жесткие ребра плавника;
2 - в виде гибкой шарнирной плети, последовательно и жестко связывающей углы слома ребер в цепной связке на синусоидальной траектории;
3 - в виде продольных тросовых тяг, задающих пространственную ориентацию звеньев хребта с помощью поперечных рычагов, установленных в средней части ребер плавникового движителя;
4 - в виде шаговых электродвигателей, в том числе линейных, управляемых с помощью микропроцессоров, позволяющих задавать более сложные законы движения корабельного плавникового движителя, регулируя размах и локальные углы атаки на локальных поверхностях движителя в зависимости от нагрузки и скорости движения корабля; при этом наклоны плавника или небольшие отклонения от строго синусоидального закона движения позволят использовать плавниковый движитель в качестве рулевого устройства и успокоителя качки одновременно.
При реализации механических приводов по схемам 1-3 плавник естественным образом будет работать в качестве пассивного движителя, использующего энергию вертикальной качки корпуса корабля на морском волнении. При реализации движителя по схеме 3 для включения его в работу в пассивном режиме можно предусмотреть соответствующие блокировки цепной линии для перевода его в режим движения по синусоидальной траектории по схемам 1-3.
Испытание натурной модели корабля показало, что плавниковый движитель обеспечивает требуемую тягу для поддержания высокой скорости хода и повышенную проходимость в сложных и штормовых условиях плавания.
ЛИТЕРАТУРА
1. Ву Т. О масштабном эффекте для передвижения водных животных. // Биогидродинамика плавания и полета / Механика. Новое в зарубежной науке. № 23. М.: Мир. 1980. С.79-112.
2. Корытко А.С., Храмушин В.Н. Исследование путей создания сверхмалого телеуправляемого корабля. Вестник ДВО РАН, 2006, № 1, c.115-122.
3. Файн А.В., Храмушин В.Н. Тензорное представление алгоритмов вычислительной гидромеханики // Вестник ДВО РАН, 2004, № 1, с.52-68.
4. Vasily Khramushin. Shipbuilding Researches for a Small Autonomous Hydrophysical Vessel. // Proceedings of the 3nd Asia-Pacific Workshop on Marine Hydrodynamics. Shanghai Jiao Tong University, Shanghai, China, June 27-28, 2006. P.35-38.
| название | год | авторы | номер документа |
|---|---|---|---|
| Активный скуловой стабилизатор качки судна | 2019 |
|
RU2749820C2 |
| Судовой движитель | 2019 |
|
RU2745044C1 |
| АКТИВНЫЙ СТАБИЛИЗАТОР КИЛЕВОЙ И БОРТОВОЙ КАЧКИ КОРАБЛЯ - ШТОРМОВОЙ АВАРИЙНЫЙ ДВИЖИТЕЛЬ | 2008 |
|
RU2384457C2 |
| Подводный аппарат с плавниковым движителем | 2018 |
|
RU2678732C1 |
| Кормовая оконечность стабилизированного для штормового плавания корабля | 2015 |
|
RU2607135C2 |
| Подводный аппарат с плавниковым движителем | 2023 |
|
RU2818387C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2008 |
|
RU2384456C2 |
| Каботажное пассажирское судно | 2016 |
|
RU2653906C1 |
| Носовая оконечность быстроходного надводного корабля или относительно тихоходного гражданского судна повышенной штормовой мореходности и ледовой проходимости в автономном плавании | 2015 |
|
RU2607136C2 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
Изобретение относится к области судостроения. Корабль содержит водонепроницаемый корпус, механизмы управления, а также энергетическую установку. Движителем корабля является плавник, состоящий из последовательности гибких полосовых поверхностей с жесткими ребрами, выполняющими перемещения в цепной сцепке, задающей углы наклона жестких ребер по касательной к бегущей синусоиде, что в разные моменты времени образует геометрически сложные седловые поверхности со строго заданными скоростями деформации поверхности машущего крыла. Для приведения в движение цепной линии плавника строго по синусоидальному закону применимы различные механизмы на основе коленчатого вала, гибкой шарнирной плети или линейных шаговых электродвигателей. Компенсируются индуктивные потери. 1 ил.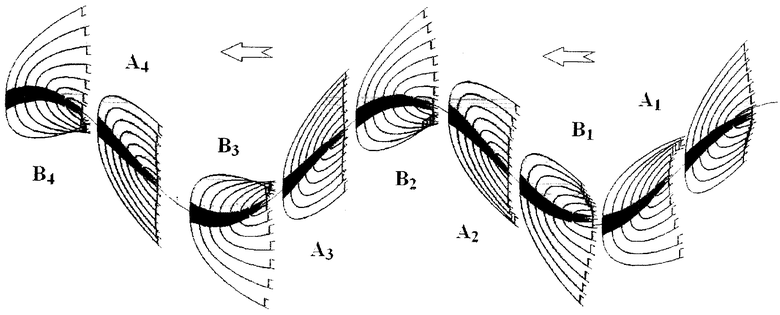
Корабль, содержащий водонепроницаемый корпус, механизмы управления, а также энергетическую установку, отличающийся тем, что движителем корабля является плавник, состоящий из последовательности гибких полосовых поверхностей с жесткими ребрами, выполняющими перемещения в цепной сцепке, задающей углы наклона жестких ребер по касательной к бегущей синусоиде, что в разные моменты времени образует геометрически сложные седловые поверхности со строго заданными скоростями деформации поверхности машущего крыла, при этом для приведения в движение цепной линии плавника строго по синусоидальному закону применимы различные механизмы на основе коленчатого вала, гибкой шарнирной плети или линейных шаговых электродвигателей.
| Подводная лодка | 1925 |
|
SU8338A1 |
| Движитель в форме рыбьего корпуса для судов, глиссеров, самолетов и дирижаблей | 1930 |
|
SU33418A1 |
| 0 |
|
SU126231A1 |

