[0001] Настоящие варианты реализации относятся в целом к механическим аппаратам искусственной вентиляции легких (аппаратам ИВЛ) и, в частности, к способу, включающему использование системы формирования изображений для оказания содействия системам управления и мониторинга в аппарате ИВЛ.
[0002] Механические аппараты ИВЛ формируют поток и давление газа и измеряют эти переменные, чтобы обеспечивать поддержку дыхания пациента в виде назначенной терапии. Эту терапию применяют посредством различных устройств взаимодействия, которые либо инвазивно прикреплены к пациенту, например эндотрахеальная трубка или трахеостомическая трубка, либо присоединены неинвазивно, например носовая маска, полнолицевая маска или носовая канюля. Переменные пневматические параметры могут быть измерены рядом с пациентом или в самом аппарате ИВЛ на удалении от пациента. Во многих случаях эти переменные предпочтительно измерять в аппарате ИВЛ на удалении от пациента, так как эта область не подвергается воздействию никаких продуктов откашливания пациента, таких как вода, слизь и другие газообразные метаболиты из дыхательных путей пациента. Воздействие этих загрязнителей делает измерения менее надежными с клинической точки зрения.
[0003] При измерении свойств искусственной вентиляции легких (ИВЛ) с помощью датчиков на удалении от пациента необходимо применять компенсацию к результатам измерения с тем, чтобы учитывать потери, связанные с пневматическими свойствами контура ИВЛ и устройства взаимодействия с пациентом между местом (-ями) измерения и пациентом, к которому применяют терапию. Правила для этой компенсации часто встроены в алгоритмы устройства аппарата ИВЛ или изучаются посредством калибровки вручную контура ИВЛ и устройства взаимодействия с пациентом. Часто ответственность за «программирование» устройства для аппарата ИВЛ на применение правильной компенсации для контура ИВЛ и устройства взаимодействия с пациентом несет ухаживающее лицо. Например, ухаживающее лицо может вводить в аппарат ИВЛ значения длины трубопровода, диаметра эндотрахеальной трубки или настройки увлажнения с тем, чтобы позволить аппарату ИВЛ регулировать лечебное воздействие. Эти способы перестают действовать в различных обстоятельствах, в том числе, без ограничений, в случае, когда ухаживающее лицо пренебрегает вводом надлежащих компонентов или программирует аппарат ИВЛ с неверными компонентами. Другие способы не срабатывают всякий раз, когда предположения относительно компенсации для аппарата ИВЛ отличаются от реальности. Калибровка вручную также не защищает от случайных ошибок, поскольку в памяти контроллера аппарата ИВЛ могли сохраниться данные предыдущей калибровки, не относящиеся к текущим контуру ИВЛ и устройству взаимодействия с пациентом.
[0004] Соответственно, для решения проблем в данной области техники необходимо разработать улучшенные способ и устройство.
[0005] В соответствии с одним вариантом реализации устройство для системы на основе аппарата ИВЛ с отслеживанием компонентов контура ИВЛ, выполненное с возможностью обеспечения ИВЛ во время применения ИВЛ и содержит источник аппарата ИВЛ, камеру, базу данных и контроллер, функционально связанный с источником аппарата ИВЛ, камерой и базой данных. Источник аппарата ИВЛ имеет выходное отверстие, выполненное с возможностью выдачи газа для ИВЛ и выполненное с возможностью присоединения, посредством первого множества компонентов для ИВЛ, к контуру ИВЛ между источником аппарата ИВЛ и пациентом. Камера выполнена с возможностью захвата изображений по меньшей мере двух или более из следующих объектов: (i) источника аппарата ИВЛ, (ii) одного или более компонентов из первого множества компонентов для ИВЛ и (iii) пациента. База данных содержит изображения в нескольких проекциях по меньшей мере второго множества компонентов для ИВЛ, предварительно одобренных для использования по меньшей мере с источником аппарата ИВЛ. Контроллер содержит по меньшей мере (i) модуль управления, (ii) модуль распознавания и идентификации компонентов, (iii) модуль отслеживания компонентов, выполненный с возможностью отслеживания целевых объектов в множестве изображений в реальном времени, захватываемых камерой, и обнаружения по меньшей мере одного изменения в отслеживаемых целевых объектах, и (iv) и модуль компенсации ИВЛ. Модуль управления выполнен с возможностью управления работой источника аппарата ИВЛ с помощью рабочих параметров, определяемых как функция по меньшей мере от (i) алгоритма формирования состава газа, (ii) выходных данных модуля распознавания и идентификации компонентов и (iii) и выходных данных модуля компенсации ИВЛ, определяемых как функция от выходных данных модуля отслеживания компонентов, причем в ответ на рабочие параметры источник ИВЛ выдает газ для ИВЛ с одним или более свойствами ИВЛ.
[0006] В другом варианте реализации модуль распознавания и идентификации компонентов выполнен с возможностью распознавания или идентификации на захваченном изображении, посредством по меньшей мере сравнения с шаблонами с использованием изображений в нескольких проекциях из базы данных, по меньшей мере двух или более из следующих объектов: (i) источника аппарата ИВЛ, (ii) одного или более компонентов из первого множества компонентов аппарата ИВЛ и (iii) одной или более характеристик пациента, причем выходные данные модуля распознавания и идентификации компонентов включают в себя данные, указывающие на распознанные или идентифицированные по меньшей мере два или более из следующих объектов: (i) источника аппарата ИВЛ, (ii) одного или более компонентов из первого множества компонентов аппарата ИВЛ и (iii) одной или более характеристик пациента.
[0007] В другом варианте реализации отслеживаемые целевые объекты включают в себя два или более из следующих объектов: (a) распознанного или идентифицированного источника аппарата ИВЛ, (b) распознанных или идентифицированных одного или более компонентов первого множества компонентов аппарата ИВЛ, (c) распознанных или идентифицированных одной или более характеристик пациента и (d) и одной или более их взаимосвязей, соединений или физических состояний. Кроме того, модуль отслеживания компонентов дополнительно выполнен с возможностью обнаружения по меньшей мере одного изменения в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов. Кроме того, выходные данные модуля отслеживания компонентов включают в себя данные, указывающие по меньшей мере на одно обнаруженное изменение в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов.
[0008] Устройство для системы на основе аппарата ИВЛ дополнительно включает в себя модуль компенсации ИВЛ, который выполнен с возможностью выполнения по меньшей мере одного действия, выбранного из группы, состоящей из: (i) изменения по меньшей мере одних входных данных для алгоритма формирования состава газа при обнаружении по меньшей мере одного изменения в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов, причем выходные данные модуля компенсации ИВЛ содержат данные, указывающие на измененные по меньшей мере одни входные данные для алгоритма формирования состава газа, и (ii) генерирования внутреннего сигнала тревоги, при этом модуль управления дополнительно выполнен с возможностью осуществления алгоритма диагностики аппарата ИВЛ в ответ на внутренний сигнал тревоги. Кроме того, в системе на основе аппарата ИВЛ выходные данные модуля компенсации ИВЛ являются входными данными непосредственно для алгоритма формирования состава газа для изменения плотности газа для ИВЛ, выдаваемого в контур ИВЛ.
[0009] Еще в одном варианте реализации отслеживаемые целевые объекты включают в себя по меньшей мере шланг аппарата ИВЛ, а указанное по меньшей мере одно обнаруженное изменение содержит изменение радиуса изгиба шланга аппарата ИВЛ. Изменение радиуса изгиба шланга аппарата ИВЛ включает переход между (i) первым радиусом изгиба, соответствующим выпрямленному шлангу аппарата ИВЛ, и (ii) вторым радиусом изгиба, соответствующим невыпрямленному или изогнутому шлангу аппарата ИВЛ. Еще в одном варианте реализации алгоритм формирования состава газа включает в себя входные данные по коэффициенту трения, основанному на радиусе изгиба, для обеспечения компенсации в контуре ИВЛ при изменении ориентации шланга аппарата ИВЛ.
[0010] В другом варианте реализации отслеживаемые целевые объекты содержат одно или более соединений в контуре ИВЛ между выходным отверстием источника аппарата ИВЛ, соединенным с шланговой манжетой трубопровода аппарата ИВЛ, трубопроводом аппарата ИВЛ, присоединенным к устройству взаимодействия с пациентом, и устройством взаимодействия с пациентом, присоединенным к пациенту. По меньшей мере одно обнаруженное изменение также содержит разъединение по меньшей мере одного или более соединений. Еще в одном варианте реализации отслеживаемые целевые объекты содержат одну или более характеристик пациента, которые включают в себя по меньшей мере одно из цвета пациента и движений стенки грудной клетки пациента, при этом по меньшей мере одно обнаруженное изменение включает в себя по меньшей мере одно из изменения цвета пациента сверх пороговой величины и изменения движений стенки грудной клетки пациента сверх другой пороговой величины.
[0011] В соответствии с другим вариантом реализации способ обеспечения ИВЛ пациенту с использованием устройства для системы на основе аппарата ИВЛ с отслеживанием компонентов контура ИВЛ включает:
обеспечение источника аппарата ИВЛ, имеющего выходное отверстие для выдачи газа для ИВЛ, выполненное с возможностью присоединения посредством первого множества компонентов для ИВЛ к контуру ИВЛ между источником ИВЛ и пациентом;
захват посредством камеры изображений по меньшей мере двух или более из следующих объектов: (i) источника аппарата ИВЛ, (ii) одного или более компонентов из первого множества компонентов для ИВЛ и (iii) пациента;
обеспечение базы данных, которая содержит изображения в нескольких проекциях второго множества компонентов для ИВЛ, предварительно одобренные для использования вместе по меньшей мере с источником аппарата ИВЛ; и
управление посредством контроллера работой источника аппарата ИВЛ с помощью рабочих параметров для выдачи газа для ИВЛ с одним или более свойствами ИВЛ,
при этом контроллер функционально соединен с источником аппарата ИВЛ, камерой и базой данных и включает в себя по меньшей мере (i) модуль управления, (ii) модуль распознавания и идентификации компонентов, (iii) модуль отслеживания компонентов, выполненный с возможностью отслеживания целевых объектов в множестве изображений в реальном времени, захватываемых посредством камеры, и обнаружения по меньшей мере одного изменения в отслеживаемых целевых объектах, и (iv) модуль компенсации ИВЛ,
при этом рабочие параметры определены как функция по меньшей мере от (i) алгоритма формирования состава газа, (ii) выходных данных модуля распознавания и идентификации компонентов и (iii) выходных данных модуля компенсации ИВЛ, определяемых как функция от выходных данных модуля отслеживания компонентов.
[0012] В одном варианте реализации способ дополнительно включает анализ, посредством модуля распознавания и идентификации, по меньшей мере одного захваченного изображения для распознавания или идентификации по меньшей мере двух или более из следующих объектов: (i) источника аппарата ИВЛ, (ii) одного или более компонентов из первого множества компонентов аппарата ИВЛ и (iii) одной или более характеристик пациента,
причем выходные данные модуля распознавания и идентификации компонентов включают в себя данные, указывающие на распознанные или идентифицированные по меньшей мере два или более из следующих объектов: (i) источника аппарата ИВЛ, (ii) одного или более компонентов из первого множества компонентов аппарата ИВЛ и (iii) одной или более характеристик пациента.
[0013] В другом варианте реализации способ дополнительно включает отслеживание целевых объектов посредством модуля отслеживания компонентов,
причем отслеживаемые целевые объекты включают в себя по меньшей мере два или более из следующих объектов: (a) распознанного или идентифицированного источника аппарата ИВЛ, (b) распознанных или идентифицированных одного или более компонентов из первого множества компонентов аппарата ИВЛ, (c) распознанных или идентифицированных одной или более характеристик пациента и (d) одной или более их взаимосвязей, соединений или физических состояний, а также
обнаружение посредством модуля отслеживания компонентов по меньшей мере одного изменения в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов,
причем выходные данные модуля отслеживания компонентов включают в себя данные, указывающие на упомянутое по меньшей мере одно обнаруженное изменение в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов.
[0014] Еще в одном варианте реализации способ дополнительно включает, при обнаружении по меньшей мере одного изменения в взаимосвязях, соединениях или физических состояниях отслеживаемых целевых объектов, выполнение, посредством модуля компенсации ИВЛ и генерирования сигналов тревоги по меньшей мере одного действия, выбранного из группы, состоящей из:
(i) изменения по меньшей мере одних входных данных для алгоритма формирования состава газа при обнаружении по меньшей мере одного изменения в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов, причем выходные данные модуля компенсации ИВЛ включают в себя данные, указывающие на измененные по меньшей мере одни входные данные для алгоритма формирования состава газа, и
(ii) генерирования внутреннего сигнала тревоги для осуществления алгоритма диагностики аппарата ИВЛ.
Также согласно способу выходные данные модуля компенсации ИВЛ являются входными данными непосредственно для алгоритма формирования состава газа для изменения плотности газа для ИВЛ, выдаваемого в контур ИВЛ.
[0015] В другом варианте осуществления предложен некратковременный (non-transitory) компьютерочитаемый носитель, в котором размещена компьютерная программа, состоящая из исполняемых инструкций, которые, при их исполнении процессором, вызывают реализацию процессором способа обеспечения ИВЛ пациенту с отслеживанием компонентов контура ИВЛ.
[0016] В соответствии с одним аспектом описано устройство для системы на основе аппарата ИВЛ, которое решает вышеупомянутые проблемы легко и автоматически с использованием алгоритма распознавания изображений в реальном времени, обеспечивающим возможность идентифицирования фактически используемых компонентов контура ИВЛ. Алгоритм распознавания изображений может сочетать изученные образцы и признаки объектов, распознавание слов, сканирование штрихкодов и сравнение с шаблонами для помощи устройству системы на основе аппарата ИВЛ в выборе наиболее точных входных данных для алгоритма компенсации газа для ИВЛ. Например, в одном варианте реализации устройство для системы включает в себя недорогую камеру, расположенную в панели устройства или возле отверстий возуховода, причем с помощью этой камеры получают изображения для использования в алгоритме распознавания изображений. Кроме того, к камере можно подносить упакованные элементы контура ИВЛ с тем, чтобы сканировать штрихкоды изготовителей компонентов для ИВЛ и/или устройств взаимодействия с пациентом перед установкой соответствующего компонента в контур ИВЛ и предварительно загружать отсканированные компоненты в алгоритм распознавания/обработки изображений.
[0017] В соответствии с другим аспектом преимущество устройства для системы на основе аппарата ИВЛ и способа состоит в том, что они избавляют от необходимости калибровать вручную аппарат ИВЛ для контура ИВЛ и устройства взаимодействия с пациентом и одновременно обеспечивают проведения точной терапии пациенту с помощью дистальных датчиков. Преимуществом системы и способа также является то, что они позволяют использовать в аппарате ИВЛ более разнообразные компоненты в контуре ИВЛ и устройства взаимодействия с пациентом, сохраняя при этом заданную точность.
[0018] Другие преимущества и выгоды станут очевидны специалистам в данной области техники после прочтения и осмысления последующего подробного описания.
[0019] Варианты реализации настоящего изобретения могут принимать форму различных компонентов или компоновок компонентов, а также различных этапов или схем организации этапов. Соответственно, чертежи представлены в целях иллюстрации предпочтительных вариантов реализации и не должны рассматриваться как ограничивающие варианты реализации. На чертежах одинаковыми ссылочными номерами обозначены аналогичные элементы.
[0020] На ФИГ. 1 приведена структурная схема устройства для системы на основе аппарата ИВЛ в соответствии с вариантом реализации настоящего изобретения.
[0021] На ФИГ. 2 приведена блок-схема способа обеспечения ИВЛ с использованием устройства для системы на основе аппарата ИВЛ в соответствии с другим вариантом реализации настоящего изобретения.
[0022] На ФИГ. 3 приведено представление изображения применения ИВЛ и сравнения с шаблонами для распознавания и идентификации компонентов в соответствии с вариантом реализации настоящего изобретения.
[0023] На ФИГ. 4 приведено другое представление изображения применения ИВЛ и сравнения с шаблонами для распознавания и идентификации компонентов в соответствии с вариантом реализации настоящего изобретения.
[0024] На ФИГ. 5 приведена блок-схема подпрограммы и способа идентификации компонентов устройства для системы на основе аппарата ИВЛ в соответствии с другим вариантом реализации настоящего изобретения.
[0025] На ФИГ. 6 приведена схема одного примера отслеживаемых целевых объектов, показанных соединенными (A) и разъединенными (B), в соответствии с вариантом реализации настоящего изобретения.
[0026] На ФИГ. 7 приведена схема примера отслеживаемого целевого объекта, показанного (A) с прямой частью, радиус изгиба которой равен бесконечности, и (B) изогнутой или непрямой частью, радиус изгиба которой меньше бесконечности, в соответствии с другим вариантом реализации настоящего изобретения;
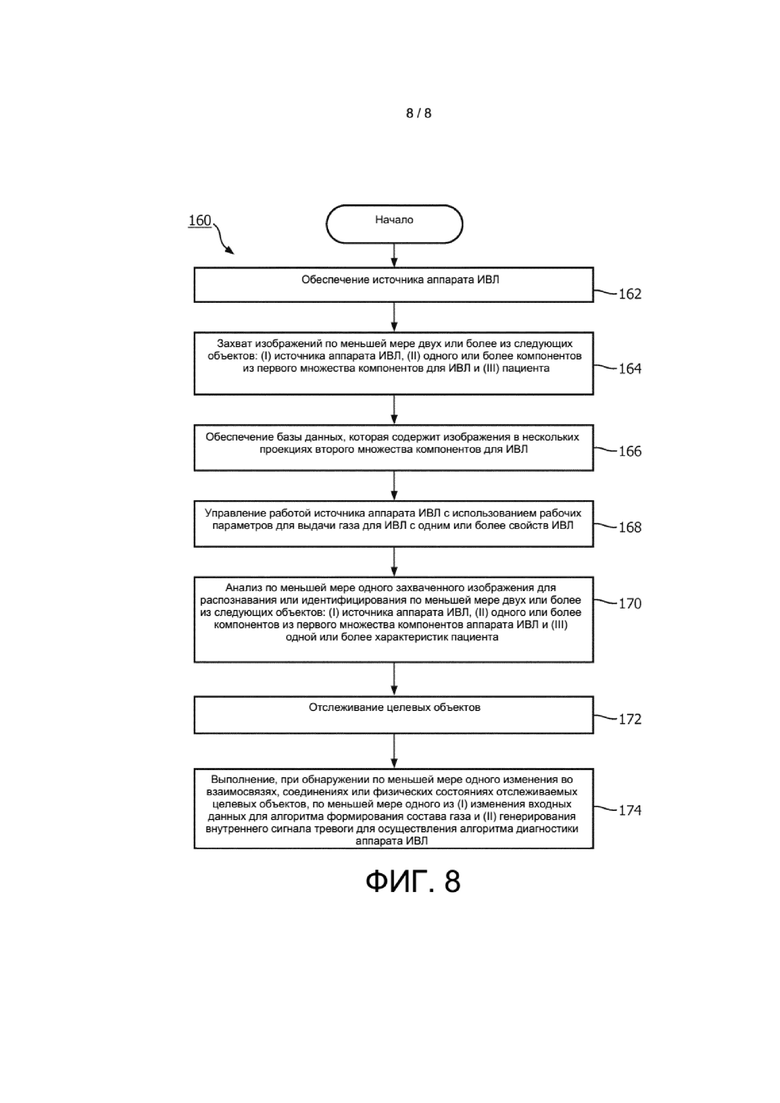
[0027] На ФИГ. 8 приведена блок-схема способа обеспечения ИВЛ пациенту с использованием устройства для системы на основе аппарата ИВЛ с отслеживанием компонентов контура ИВЛ в соответствии с другим вариантом реализации настоящего изобретения.
[0028] Варианты реализации настоящего изобретения и подробности их различных признаков и преимуществ объясняются более полно со ссылкой на не имеющие ограничительного характера примеры, которые описаны и/или проиллюстрированы на чертежах и подробно изложены в последующем описании. Следует отметить, что признаки, проиллюстрированные на чертежах, необязательно изображены в масштабе и, как понятно специалисту в данной области, признаки одного варианта реализации могут быть использованы в других вариантах реализации, даже если это не указано в явном виде в настоящем документе. Описания хорошо известных компонентов и методов обработки могут быть опущены во избежание ненужного отвлечения внимания от вариантов реализации настоящего изобретения. Примеры, используемые в настоящем документе, предназначены исключительно для облегчения понимания возможных путей практической осуществления вариантов реализации настоящего изобретения и предоставления специалистам в данной области возможности осуществить то же самое на практике. Соответственно, примеры в настоящем документа не следует рассматривать как ограничивающие объем вариантов реализации настоящего изобретения, который определен исключительно прилагаемой формулой изобретения и действующим законодательством.
[0029] Понятно, что варианты реализации настоящего изобретения не ограничены конкретными методологией, протоколами, устройствами, приборами, материалами, приложениями и т. д., описанными в настоящем документе, поскольку они могут меняться. Также понятно, что терминология, применяемая в настоящем документе, используется только в целях описания конкретных вариантов реализации и не предназначена для ограничения объема вариантов реализации, который определен формулой изобретения. Необходимо отметить, что используемые в настоящем документе и прилагаемой формуле изобретения формы единственного числа охватывают и формы множественного числа, если из контекста явно не вытекает иное.
[0030] Если не указано иное, все технические и научные термины, используемые в настоящем документе, имеют значения в общепринятом понимании для специалиста в области, к которой принадлежат варианты реализации настоящего изобретения. Описаны предпочтительные способы, устройства и материалы, хотя на практике или испытании вариантов реализации могут быть использованы любые способы и материалы, аналогичные или эквивалентные описанным в настоящем документе.
[0031] Управление применяемым к пациенту давлением в механическом аппарате ИВЛ часто осуществляют путем дистального регулирования давления в механическом аппарате ИВЛ и применения компенсации для известных или откалиброванных компонентов в контуре ИВЛ и устройства взаимодействия с пациентом. У современных потребителей из сферы здравоохранения широкий выбор компонентов контура от огромного числа изготовителей для наилучшего удовлетворения потребностей пациента при обеспечении взаимодействия потребителя/пользователя с аппаратом ИВЛ. Предусматривать в аппарате ИВЛ все это разнообразие и обеспечивать точное лечебное воздействие по всему спектру — это обременительно. В соответствии с одним вариантом реализации камеру, помещенную на медицинский аппарат ИВЛ, программируют на распознавание компонентов контура, которые помещают в контур ИВЛ, и устройство взаимодействия с пациентом. Контроллер выполнен с возможностью управления, посредством программного обеспечения распознавания изображения, аппаратом ИВЛ и применения надлежащей компенсации для учета самых разных компонентов в контуре ИВЛ и устройства взаимодействия с пациентом. В результате аппарат ИВЛ обеспечивает точное лечебное воздействие автоматически без необходимости в калибровке или программировании пользователем аппарата ИВЛ для компенсации контура ИВЛ и устройства взаимодействия с пациентом.
[0032] На ФИГ. 1 приведена структурная схема устройства 10 системы на основе аппарата ИВЛ в соответствии с вариантом реализации настоящего изобретения. Устройство 10 системы на основе аппарата ИВЛ содержит источник 12 аппарата ИВЛ, камеру 14, базу 16 данных, пользовательский интерфейс 18 и контроллер 20, функционально соединенный с источником 12 аппарата ИВЛ, камерой 14, базой 16 данных и пользовательским интерфейсом 18. Источник 12 аппарата ИВЛ содержит любой подходящий аппарат ИВЛ, имеющий выходное отверстие 52, выполненное с возможностью выдачи газа для ИВЛ. Выходное отверстие 52 выполнено с возможностью присоединения, посредством первого множества компонентов для ИВЛ, к контуру 34 ИВЛ между источником 12 аппарата ИВЛ и пациентом 40. Камера 14 может представлять собой любую подходящую камеру, выполненную с возможностью захвата изображений по меньшей мере двух или более из следующих объектов: (i) источника 12 аппарата ИВЛ, (ii) одного или более компонентов из первого множества компонентов для ИВЛ в контуре 34 ИВЛ и (iii) пациента 40. В одном варианте реализации камера 14 представляет собой видеокамеру.
[0033] Устройство 10 системы аппарата ИВЛ выполнено с возможностью использования вместе с контуром 34 ИВЛ, который может содержать ряд различных компонентов контура ИВЛ. В число различных компонентов контура ИВЛ входят по меньшей мере один или более из шланга или воздуховода 36 для ИВЛ и устройства 38 взаимодействия с пациентом. Устройство 38 взаимодействия с пациентом может представлять собой любое из различных устройств взаимодействия с пациентом, предназначенных для прикрепления к пациенту 40 во время получения терапии ИВЛ. Устройство 38 взаимодействия с пациентом может быть инвазивно прикреплено к пациенту, например эндотрахеальная трубка или трахеостомическая трубка, или неинвазивно подсоединено, например носовая маска, полнолицевая маска или носовая канюля. Ухаживающее лицо или оператор 42 может присутствовать при начальной установке устройства 10 системы на основе аппарата ИВЛ и/или для оказания помощи, если потребуется, во время применения терапии ИВЛ к пациенту 40. В число компонентов контура ИВЛ могут также входить один или более компонентов 44 для ИВЛ (например, увлажнитель, нагреватель, распылитель и т. д.), один или более датчиков 46 (например, датчик температуры, датчик потока и т. д.) и один или более клапанов 48. В одном варианте реализации шланг 36 ИВЛ имеет на своем конце шланговую манжету 50, которая выполнена с возможностью соединения с выходным отверстием 52 источника 12 аппарата ИВЛ.
[0034] Как показано на ФИГ. 1, база данных или хранилище 16 содержит электронный носитель информации, который хранит информацию в электронном виде. Электронный носитель информации хранилища 16 базы данных может содержать одно или оба из системного хранилища, которое выполнено за одно целое (т.е. выполнено по существу несъемным) с системой 10, и/или съемного хранилища, которое может быть соединено с возможностью отсоединения с системой 10 посредством, например, порта (например, порта USB, порта FireWire и т. д.), или накопителя (например, дискового накопителя и т. д.). База данных или хранилище 16 может содержать один или более из оптически считываемых носителей информации (например, оптические диски и т. д.), выполненных с возможность магнитного считывания носителей информации (например, магнитную ленту, накопитель на жестких магнитных дисках, накопитель на гибких диска и т. д.), основанных на электрическом заряде носителей информации (например, СППЗУ, ЭСППЗУ, ОЗУ и т. д.), твердотельных носителей информации (например, устройство флэш-памяти и т. д.) и/или других выполненных с возможностью электронного считывания носителей информации. База данных или хранилище 16 может хранить программные алгоритмы, определяемую контроллером 20 информацию, принимаемую посредством пользовательского интерфейса 18 информацию и/или другую информацию, которая позволяет системе 10 функционировать должным образом. Например, в базу данных или хранилище 16 можно записывать или сохранять изображения в нескольких проекциях по меньшей мере второго множества компонентов ИВЛ, предварительно одобренных для использования по меньшей мере с источником 12 аппарата ИВЛ (которые описаны в любом месте в настоящем документе), и/или другую информацию. База данных или хранилище 16 может быть отдельным компонентом системы 10 или хранилище 16 базы данных может быть единым целым с одним или более компонентами системы 10 (например, с контроллером 20). Кроме того, базу данных или хранилище 16 можно в идеале содержать и поддерживать (например, обновлять) на сетевом сервере, совместно используемом компьютере, на базе Интернета или содержать в стороннем центре обработки данных, а система 10 может получать доступ к этим данным посредством телекоммуникационного протокола (например, посредством соединения проводной или беспроводной связи со сторонним центром обработки данных).
[0035] Пользовательский интерфейс 18 выполнен с возможностью обеспечения взаимодействия между системой 10 и пользователем (например, оператором 42, пациентом или субъектом 40, ухаживающим лицом, лицом, принимающим решение по терапии и т. д.), посредством которого пользователь может предоставлять информацию в систему 10 и получать информацию из нее. Пользовательский интерфейс 18 обеспечивает одно или более из данных, результатов и/или инструкций и любых других пригодных для обмена сведений, в совокупности называемых «информацией», которые подлежать обмену между пользователем и системой 10. Примером информации, которая может передаваться пациенту 40 или пользователю 42, является отчет, подробно описывающий тенденции в характере дыхания пациента, такие как частота дыхания, дыхательный объем и применяемые давления в течение всего периода, когда пациента получает (респираторную) терапию. Другим примером информации, которая может передаваться пациенту 40 и/или пользователю 42, является сигнал тревоги или опасное состояние, обнаруженное системой 10. В число примеров интерфейсных устройств, пригодных для включения в пользовательский интерфейс 18, входят кнопочная панель, кнопки, переключатели, клавиатура, ручки, рычаги, экран дисплея, сенсорный экран, динамики, микрофон, световой индикатор, звуковой сигнал тревоги и принтер. Информация может предоставляться пациенту 40 с помощью пользовательского интерфейса 18 в виде звуковых сигналов, визуальных сигналов, тактильных сигналов и/или других сенсорных сигналов. В одном варианте реализации пользовательский интерфейс 18 может быть встроен в интерфейс выполненного с возможностью съема хранилища, обеспечиваемый базой данных или хранилищем 16. В таком примере информацию загружают в систему 10 из выполненного с возможностью съема хранилища (например, смарт-карты, устройства флэш-памяти, выполненного с возможностью съема диска и т. д.), которое позволяет пользователю настраивать реализацию системы 10. В качестве пользовательского интерфейса 18 предполагаются другие методы обмена информацией с системой 10.
[0036] Как отмечено выше в настоящем документе, контроллер 20 функционально связан с источником 12 аппарата ИВЛ, камерой 14, базой 16 данных и пользовательским интерфейсом 18. Контроллер 20 содержит один или более модулей, включая по меньшей мере модуль 22 управления, модуль 24 распознавания и идентификации компонентов, модуль 26 отслеживания компонентов, выполненный с возможностью отслеживания целевых объектов в множестве изображений в реальном времени, захватываемых камерой, и возможностью обнаружения по меньшей мере одного изменения в отслеживаемых целевых объектах, и модуль 28 компенсации ИВЛ и генерирования сигналов тревоги. В одном варианте реализации модуль 28 выполнен в виде модуля компенсации ИВЛ, без сигналов тревоги. Кроме того, контроллер 20 может быть выполнен с возможностью соединения посредством проводной или беспроводной связи с удаленным устройством или сетью например, как указано номером позиции 32.
[0037] В одном варианте реализации контроллер 20 содержит один или более из микропроцессора, микроконтроллера, программируемой пользователем вентильной матрицы (FPGA), интегральной схемы, дискретных компонентов аналоговых или цифровых схем, аппаратного обеспечения, программного обеспечения, встроенного программного обеспечения или любой их комбинации для выполнения различных функций, как рассмотрено в настоящем документе, а также в соответствии с требованиями к осуществлению и/или применению данного устройства системы аппарата ИВЛ. Контроллер 20 может также содержать один или более из различных модулей, которые обсуждаются в настоящем документе. Дополнительные подробные сведения о контроллере 20 будут представлены далее в настоящем документе со ссылкой на фигуры. При этом модули 22–28 могут представлять собой одно или более из интегральной схемы, дискретных компонентов аналоговых или цифровых схем, аппаратного обеспечения, программного обеспечения, встроенного программного обеспечения или любой их комбинации для выполнения различных функций, как рассмотрено в настоящем документе, а также в соответствии с требованиями к осуществлению и/или применению данного устройства системы аппарата ИВЛ. Кроме того, один или более из модулей 22–28 могут представлять собой различные комбинации из одного или более различных модулей.
[0038] Модуль управления 22 контроллера 20 выполнен с возможностью управления работой источника 12 ИВЛ с помощью рабочих параметров, определяемых как функция по меньшей мере от (i) алгоритма формирования состава газа, (ii) выходных данных модуля 24 распознавания и идентификации компонентов и (iii) и выходных данных модуля 28 компенсации ИВЛ, определяемых как функция от выходных данных модуля 26 отслеживания компонентов. При этом преимуществом является то, что выходные данные различных модулей могут быть использованы для оценки податливости контура ИВЛ и обеспечения тем самым точности компенсации контура. Эта улучшенная точность податливости контура приводит к улучшенной оценке параметров пациента, таких как поток, дыхательный объем, и дыхательных параметров, таких как работа дыхания (РД), мышечное давление (Pmus), произведение давления на время (ПДВ), внутреннее положительное давление в конца выдоха (ПДКВв). Эти параметры частот используют для оценки состояния пациента или применяют в качестве входных данных в управление с замкнутым контуром аппаратом ИВЛ. Каждый компонент может иметь каталогизированную податливость, или податливость может быть оценена по объему (т. е. пространству) газа внутри компонента в соответствии с сжимаемостью газа и оценке размера компонента. Податливость контура используют для коррекции дистальных измерений до их соответствующих проксимальных значений, привязанных к пациенту. Дистальные измерения более точные, когда их корректируют с учетом потерь, обусловленных контуром, в том числе потерь, связанных с податливостью. Что касается податливости контура, фраза «компенсация контура» обычно используемая в настоящем документе, относится к использованию податливости контура для мер по коррекции. Другими словами, источник 12 аппарата ИВЛ выполнен с возможностью выдачи газа для ИВЛ с одним или более свойств ИВЛ в ответ на один или более рабочих параметров, предоставляемых посредством модуля 22 управления, тем самым обеспечивая улучшенный контроль параметров пациента и обратную связь в улучшенном управлении с замкнутым контуром аппаратом ИВЛ. Это улучшенное управление с замкнутым контуром аппаратом ИВЛ может также включать использование ввода из камеры 14 (и/или полученных из нее данных) в качестве параметра для оценки потока и давления газа у пациента.
[0039] Модуль 24 распознавания и идентификации компонентов выполнен с возможностью распознавания или идентифицирования на захваченном изображении по меньшей мере сравнения с шаблонами с использованием изображений в нескольких проекциях из базы данных по меньшей мере двух или более из следующих объектов: (i) источника 12 аппарата ИВЛ, (ii) одного или более компонентов из первого множества компонентов аппарата ИВЛ в контуре 34 ИВЛ между источником 12 аппарата ИВЛ и пациентом 40 и (iii) одной или более характеристик пациента 40. В одном варианте реализации модуль распознавания и идентификации компонентов выполнен с возможностью осуществления ряда этапов сравнения с шаблонами и/или изображениями следующим образом, причем методы сравнения с шаблонами и/или изображениями известны в данной области техники, и поэтому в настоящем документе приводится лишь краткое обсуждение. Во-первых, модуль 24 использует способ гипотезы объектности для перечисления всех потенциальных областей компонентов на захваченном изображении. Обнаружение объекта главным образом основывается на насыщенности краев на захваченном изображении. Вокруг областей, имеющих насыщенные края объекта, модуль может случайным образом поместить множество скользящих окон в качестве потенциальных областей компонентов. Затем каждую потенциальную область компонента нормализуют до фиксированного размера и сравнивают со всеми изображениями в нескольких проекциях всех компонентов в базе 16 данных. Компонент, имеющий при сравнении наивысшее сходство с потенциальной областью компонента, принимают за идентичный обнаруженной области. После этого модуль слегка сдвигает обнаруженную область и выполняет то же самое сравнение с изображениями, чтобы уточнить ее местоположение. Для повышения скорости обработки сравнение выполняют на основе корреляции всех пикселей каждой пары изображений. При наличии мощного вычислительного ресурса каждое изображение будет сначала преобразовано в устойчивый к ошибкам вектор признаков, например, в представление на основе глубокого обучения, а затем модуль выполняет сравнение в преобразованном пространстве признаков. Для распознавания и идентификации компонентов модуль 24 может также осуществлять один или более этапов, отличающихся от представленных выше или дополняющих их. Выходные данные модуля 24 распознавания и идентификации компонентов содержат данные, указывающие на распознанные или идентифицированные по меньшей мере два или более из следующих объектов: (i) источника аппарата ИВЛ, (ii) одного или более компонентов из первого множества компонентов аппарата ИВЛ и (iii) одной или более характеристик пациента.
[0040] Как указано выше, модуль 26 отслеживания компонентов выполнен с возможностью отслеживания целевых объектов в множестве изображений, захватываемых в реальном времени посредством камеры 14, и обнаружения по меньшей мере одного изменения в отслеживаемых целевых объектах. В одном варианте реализации отслеживаемые целевые объекты содержат два или более из следующих объектов: (a) распознанного или идентифицированного источника 12 аппарата ИВЛ, (b) распознанных или идентифицированных одного или более компонентов из первого множества компонентов аппарата ИВЛ в контуре 34 ИВЛ, (c) распознанных или идентифицированных одной или более характеристик пациента 40 и (d) и одной или более их взаимосвязей, соединений или физических состояний. В числе нескольких примеров взаимосвязи можно назвать следующее. В отношении местоположения маски пациента, находится ли она на носе пациента? Маска покрывает рот и нос? Маска соединена со стомой? Предполагаются также дополнительные взаимосвязи. В одном варианте реализации модуль 26 отслеживания компонентов выполнен с возможностью осуществления ряда этапов следующим образом. Для каждого распознанного компонента модуль 26 непрерывно отслеживает его внешний вид с течением времени. Отслеживание выполняют путем (1) небольшого сдвига целевого объекта относительно его первоначального положения и (2) измерения сходства между внешним видом в сдвинутом положении и внешним видом и одним или более предыдущих внешних видов. Сдвинутое положение, соответствующее наивысшему сходству, будет определено как текущее положение отслеживаемого целевого объекта. Для простоты сходство основывается непосредственно на корреляции внешнего вида изображений. При наличии мощных вычислительных ресурсов может быть использована метрика сходства, основанная на более устойчивых к ошибкам признакам внешнего вида изображения. В случае внезапного изменения освещения/окружающей среды отслеживание может потерпеть неудачу. Если это происходит, работа модуля 26 прекращается и происходит перезапуск модуля 24 распознавания/идентификации. Модуль 26 отслеживания компонентов дополнительно выполнен с возможностью обнаружения по меньшей мере одного изменения в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов. В числе нескольких примеров изменения взаимосвязи можно назвать следующее. Маска пациента отделена от лица пациента, что указывает на отсоединение? Внешний вид трахеостомической трубки указывает на экстубацию? Возможны также другие изменения во взаимосвязях. В одном варианте реализации во время непрерывного отслеживания модулем каждого отслеживаемого целевого объекта или целевых объектов модуль непрерывно сравнивает разницу между текущим внешним видом отслеживаемых целевых объектов и по меньшей мере одним предыдущим внешним видом. Если в данный момент времени разница во внешнем виде становится значительной (т. е. выходит за пределы пороговой величины), весьма вероятно, что произошло определенное изменение. Тогда система может отправить сигнал тревоги, указывающий на то, что обнаружено изменение. Однако возможны ложные сигналы тревоги, если значительное изменение внешнего вида вызывает изменение освещения/окружающей среды. Эту проблему можно смягчить путем сравнения цветовой гистограммы текущего захваченного изображения с цветовой гистограммой одного или более предыдущих захваченных изображений. Если гистограммы остаются сходными (например, в пределах данного порогового допустимого отклонения), это указывает на то, что освещение/окружающие условия остаются неизменными. Поэтому отправка сигнала тревоги, указывающего на то, что в отслеживаемых целевых объектах произошло изменение, является безопасной. Для отслеживания компонентов и обнаружения изменения в отслеживаемых компонентах модуль 26 может также осуществлять один или более этапов, отличающихся от представленных выше или дополняющих их. Выходные данные модуля 26 отслеживания компонентов содержат данные, указывающие по меньшей мере на одно обнаруженное изменение в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов.
[0041] Модуль 28 компенсации ИВЛ выполнен с возможностью изменения по меньшей мере одних входных данных для алгоритма формирования состава газа при обнаружении по меньшей мере одного изменения в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов. Например, обнаружение увлажнителя, подсоединенного в контуре, означает, что алгоритм компенсации газа должен включать в себя водяной пар. Обнаружение распылителя указывает на то, что лекарственный препарат в виде аэрозоля будет добавляться в контур и снижать чистую утечку алгоритма компенсации утечки. В последнем случае, когда в контур добавляют распыляемый поток, это выглядит как отрицательная утечка. Знание того, что это отрицательная утечка, вводимая в контур, позволяет применять надлежащую компенсацию. Выходные данные модуля 28 компенсации ИВЛ содержат данные, указывающие на измененные по меньшей мере одни входные данные для алгоритма формирования состава газа. В одном варианте реализации выходные данные модуля 28 компенсации ИВЛ являются входными данными непосредственно для алгоритма формирования состава газа для изменения плотности газа для ИВЛ, выдаваемого в контур 34 ИВЛ. В другом варианте реализации выходные данные модуля 28 компенсации ИВЛ являются входными данными для алгоритма компенсации утечки, который позволяет управлять модулем, чтобы синхронизировать с пациентом наряду с другими потребностями в механической ИВЛ, такими как компенсация подача и давления потока, известными в механической ИВЛ. Модуль 28 компенсации ИВЛ может быть также выполнен с возможностью генерирования внутреннего сигнала тревоги, причем модуль 22 управления дополнительно выполнен с возможностью осуществления алгоритма диагностики аппарата ИВЛ в ответ на внутренний сигнал тревоги. Например, обнаружение отсутствия движений стенки грудной клетки пациента может указывать на обструкцию или отсоединение. В другом примере можно контролировать цвет пациента, и если пациент становится синим (т. е. синюшным), то модуль 28 компенсации ИВЛ может формировать сигнал тревоги по низкому SpO2.
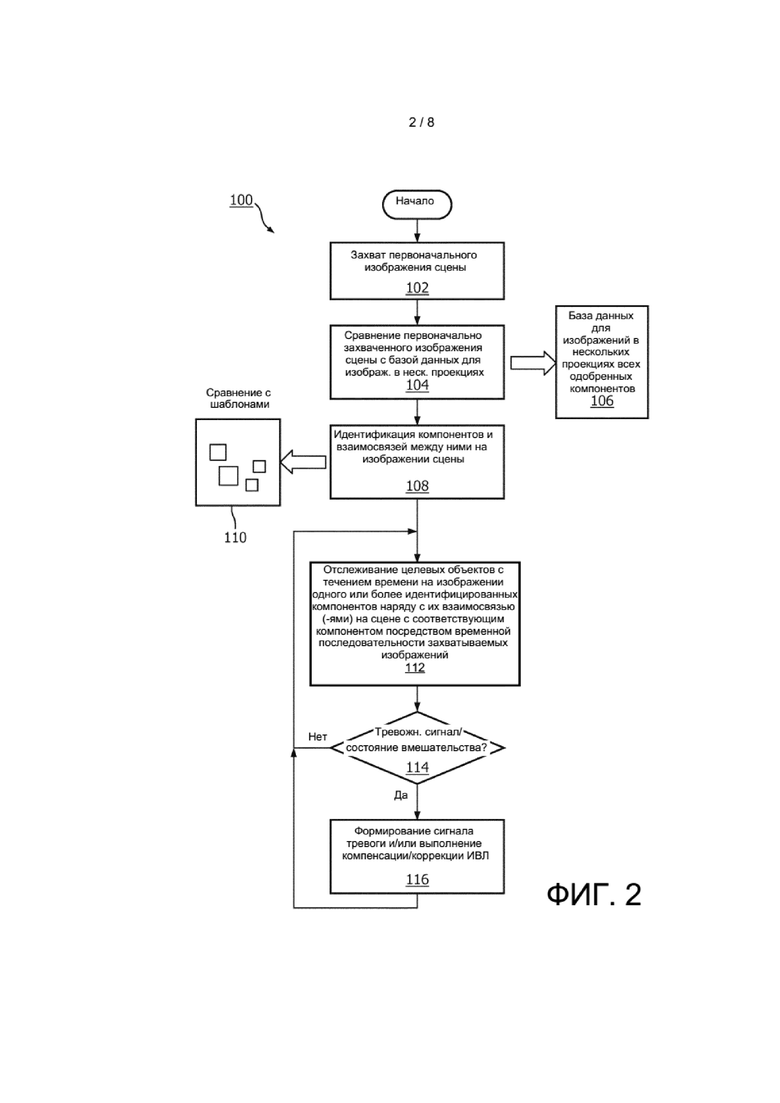
[0042] На ФИГ. 2 показана блок-схема способа 100 обеспечения ИВЛ с использованием устройства для системы на основе аппарата ИВЛ в соответствии с другим вариантом реализации настоящего изобретения. После того, как система на основе аппарата ИВЛ вместе с пациентом установлены в исходное положение, на этапе 102 захватывают посредством камеры 14 изображение первоначальной сцены системы аппарата ИВЛ. На этапе 104 сравнивают, посредством модуля 24 распознавания и идентификации компонентов, изображение первоначальной сцены с базой данных для изображений в нескольких проекциях с использованием (указано ссылочным номером 106) базы данных (например, базы 16 данных) всех компонентов для ИВЛ, предварительно одобренных для использования с источником 12 аппарата ИВЛ. На этапе 108 идентифицируют, посредством модуля 24 распознавания и идентификации компонентов, компоненты для ИВЛ и взаимосвязи между ними на изображении первоначальной сцены. В одном варианте реализации идентификацию компонентов для ИВЛ осуществляют путем сравнения с шаблонами или других подходящих алгоритмов, например, как указано номером позиции 110. После распознавания или идентифицирования источника аппарата ИВЛ, компонентов для ИВЛ и устройства взаимодействия с пациентом с контуром ИВЛ, а также пациента в пределах сцены, процесс переходит на следующий этап. На этапе 112 с помощью временной последовательности изображений, захватываемых камерой, отслеживают целевые объекты на изображении одного или более идентифицированных компонентов наряду с их взаимосвязью или взаимосвязями с одним или более других компонентов на сцене, в том числе положения и ориентации. Отслеживание целевых объектов выполняют посредством модуля 26 отслеживания компонентов. На этапе 114 на основе по меньшей мере одного обнаруженного изменения в взаимосвязях, соединениях или физических состояниях одной или более отслеживаемых целевых объектов выполняют запрос, возникли ли сигнал тревоги и/или состояния вмешательства. Если сигнал тревоги и/или состояние вмешательства не возникли, процесс возвращается на этап отслеживания целевых объектов (этап 112). С другой стороны, если сигнал тревоги и/или состояние вмешательства возникли, процесс переходит на этап 116. На этапе 116 способ включает формирование сигнала тревоги, например, в пользовательском интерфейсе 18, и/или выполнение компенсации и/или коррекции ИВЛ на основе по меньшей мере одного обнаруженного изменения в взаимосвязях, соединениях или физических состояниях одного или более отслеживаемых целевых объектов.
[0043] На ФИГ. 3 которой приведено представление 120 изображения применения ИВЛ и сравнения с шаблонами для распознавания и идентификации компонентов в соответствии с вариантом реализации настоящего изобретения. На сцене в представлении 120 изображения пациент 40 получает терапию ИВЛ, когда ухаживающее лицо 42 наблюдает за пациентом. Как обсуждалось в настоящем документе, модуль 24 распознавания и идентификации компонентов (ФИГ. 1) выполнен с возможностью распознавания или идентифицирования на захваченном изображении 120 по меньшей мере путем сравнения с шаблонами с использованием изображений в нескольких проекциях из базы 16 данных (ФИГ. 1) по меньшей мере двух или более из следующих объектов: (i) источника 12 аппарата ИВЛ, (ii) одного или более компонентов из первого множества компонентов аппарата ИВЛ и (iii) одной или более характеристик пациента 40. Представление 120 изображения включает в себя источник 12 аппарата ИВЛ, соединение 122 трубки датчика давления (т. е. оно должны быть возле источника аппарата ИВЛ), соединение 124 патрубка вдоха с источником аппарата ИВЛ, патрубок 126 выдоха, пациент 40, переходник 128 эндотрахеальной трубки (т. е. должен быть возле пациента) и стенку 130 грудной клетки пациента для вычисления частоты дыхания. На представлении 120 изображения эндотрахеальная трубка не показана, но если бы она была показана, то могла бы указывать на непреднамеренную или случайную экстубацию, состояние отсоединения, в результате чего устройство для системы на основе аппарата ИВЛ выдавало бы сигнал тревоги, например, в пользовательском интерфейсе 18. Выходные данные модуля 24 распознавания и идентификации компонентов содержат данные, указывающие на распознанные или идентифицированные по меньшей мере два или более из следующих объектов: (i) источника аппарата ИВЛ, (ii) одного или более компонентов из первого множества компонентов аппарата ИВЛ и (iii) одной или более характеристик пациента.
[0044] На ФИГ. 4 аналогичным образом показано другое представление 132 изображения применения ИВЛ и сравнения с шаблонами для распознавания и идентификации компонентов в соответствии с вариантом реализации настоящего изобретения. Представление 132 изображения включает в себя источник 12 аппарата ИВЛ, бактериальный фильтр 134, который соединяет аппарат 12 ИВЛ с патрубком вдоха, соединение 136 линии определения давления, стенку 130 грудной клетки пациента (например, для вычисления частоты дыхания), лицо 40 пациента (например, для вычисления частоты сердечных сокращений), одобренную полнолицевую маску 138, линию определения давления проксимально соединению 140 пациента и гофрированный прозрачный трубопровод 142 с внутренним диаметром (ID) 22 мм. Соответственно, еще в одном варианте реализации отслеживаемые целевые объекты содержат одну или более характеристик пациента, которые включают в себя по меньшей мере одно из цвета пациента и движений стенки грудной клетки, при этом по меньшей мере одно обнаруженное изменение включает в себя по меньшей мере одно из изменения цвета пациента сверх пороговой величины и изменения движений стенки грудной клетки пациента сверх пороговой величины.
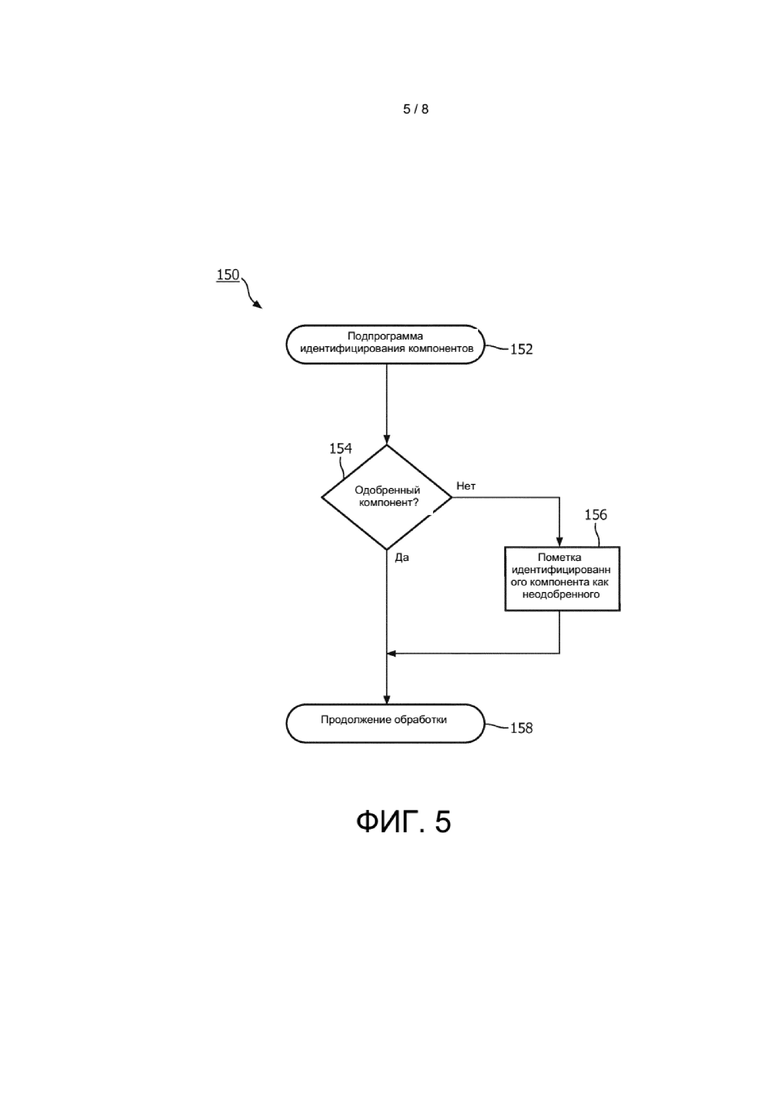
[0045] На ФИГ. 5 приведена блок-схема подпрограммы 150 и способа идентификации компонентов устройства системы аппарата ИВЛ в соответствии с другим вариантом реализации настоящего изобретения. Этап 152 является началом подпрограммы идентифицирования компонентов. Выполняется запрос, чтобы определить, является ли идентифицированный компонент компонентом, одобренным для использования вместе с конкретным источником 12 аппарата ИВЛ (этап 154). Если компонент не одобрен для использования с конкретным источником аппарата ИВЛ, подпрограмма переходит к этапу 156. На этапе 156 идентифицированный компонент помечается как неодобренный. Пометка идентифицированных компонентов как неодобренных может быть использована в последующей обработке, например, для выполнения настройки по умолчанию конфигурации с учетом неодобренных идентифицированных компонентов или некоторого другого действия по умолчанию в соответствии с требованиями для данного применения терапии ИВЛ. Если компонент является одобренным для использования вместе с конкретным источником аппарата ИВЛ, подпрограмма переходит к этапу 158 и возвращается к основной обработке, из которой эта подпрограмма была вызвана.
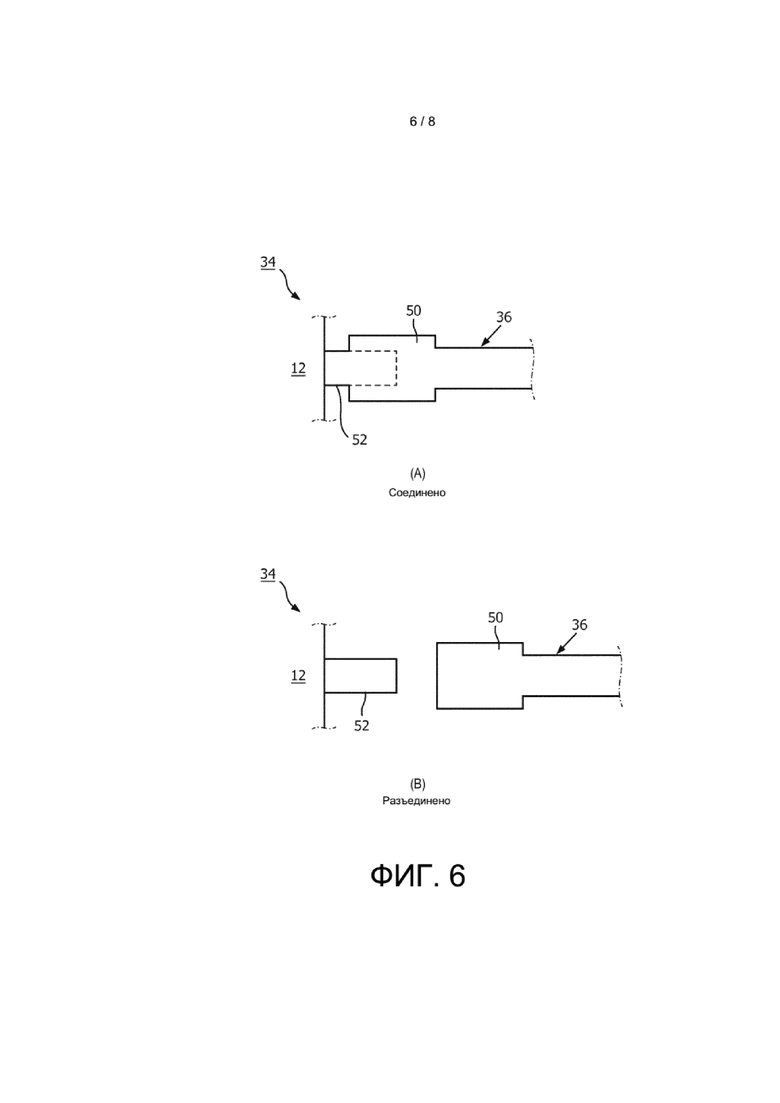
[0046] На ФИГ. 6 приведена схема одного примера отслеживаемых целевых объектов, показывающее соединенное (a) и разъединенное (b) состояния, в соответствии с вариантом реализации настоящего изобретения. В данном примере отслеживаемые целевые объекты представляют собой соединение между (i) выходным отверстием 52 источника 12 аппарата ИВЛ и (ii) манжетой 50 шланга или воздуховода 36 ИВЛ контура 34 ИВЛ. Модуль 26 отслеживания компонентов (ФИГ. 1) выполнен с возможностью обнаружения по меньшей мере одного изменения в одном соединении отслеживаемых целевых объектов. Выходные данные модуля отслеживания компонентов содержат данные, указывающие по меньшей мере на одно обнаруженное изменение в соединении отслеживаемых целевых объектов. В случае иллюстрации на ФИГ. 6 (A) выходные данные модуля отслеживания компонентов будут содержать данные, указывающие на соединение, тогда как в случае иллюстрации на ФИГ. 6 (B) выходные данные модуля отслеживания компонентов будут содержать данные, указывающие на разъединение, т. е. изменение в отслеживаемых целевых объектах с соединения на разъединение. Соответственно, в одном варианте реализации отслеживаемые целевые объекты представляют собой одно или более соединений в контуре ИВЛ между выходным отверстием источника аппарата ИВЛ, соединенным с шланговой манжетой трубопровода аппарата ИВЛ, трубопроводом аппарата ИВЛ, соединенным с устройством взаимодействия с пациентом, и устройством взаимодействия с пациентом, присоединенным к пациенту, при этом по меньшей мере одно обнаруженное изменение представляет собой разъединение по меньшей мере одного или более соединений.
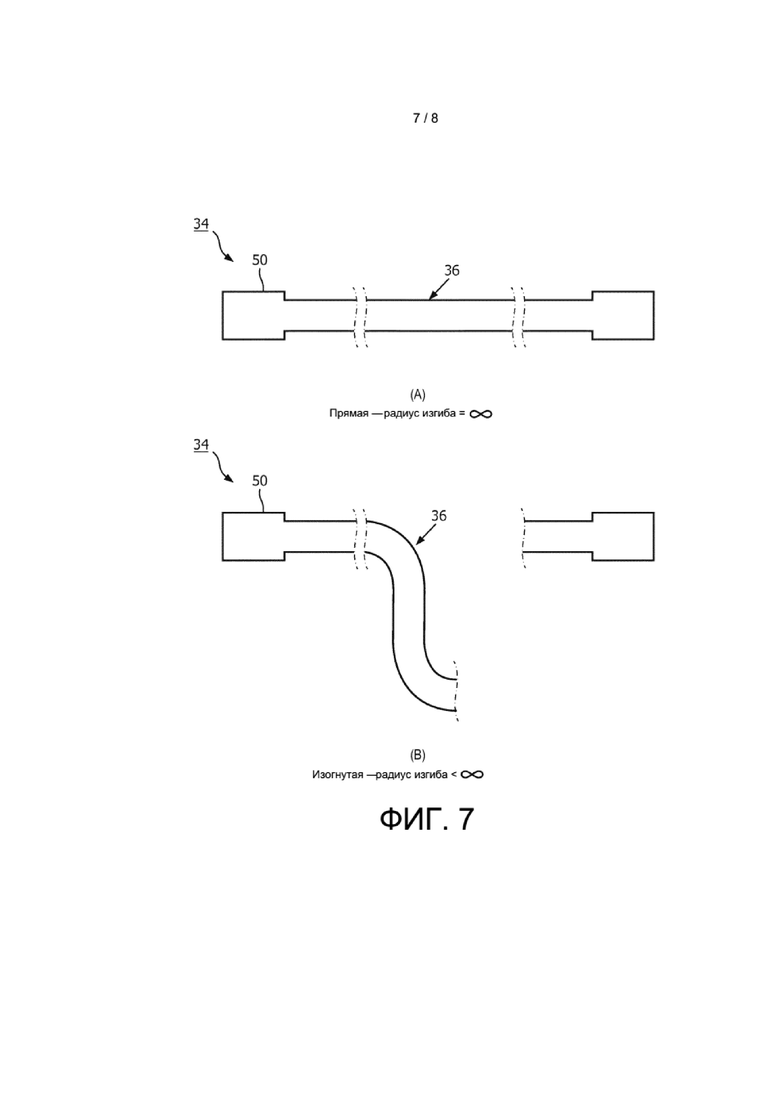
[0047] На ФИГ. 7 показана схема примера отслеживаемого целевого объекта, показанного (a) с прямой частью, радиус изгиба которой равен бесконечности, и (b ) изогнутой или непрямой частью, радиус изгиба которой меньше бесконечности, в соответствии с другим вариантом реализации настоящего изобретения. В данном примере отслеживаемые целевые объекты представляют физическое состояние выбранной части шланга или воздуховода 36 ИВЛ контура 34 ИВЛ, например между двумя муфтами 50 не его противоположных концах. Модуль 26 отслеживания компонентов (ФИГ. 1) выполнен с возможностью обнаружения по меньшей мере одного изменения в физическом состоянии отслеживаемых целевых объектов. Выходные данные модуля отслеживания компонентов содержат данные, указывающие по меньшей мере на одно обнаруженное изменение отслеживаемых целевых объектов. В случае иллюстрации на ФИГ. 7 (A) выходные данные модуля отслеживания компонентов будут содержать данные, указывающие на прямое состояние (т. е. радиус изгиба = ∞), тогда как в случае иллюстрации на ФИГ. 7 (B) выходные данные модуля отслеживания компонентов будут содержать данные, указывающие на изогнутое состояние, т. е. изменение в отслеживаемых целевых объектах с прямого на изогнутое состояние. Изменение в отслеживаемых целевых объектах может также включать изменение с изогнутого на прямое и т. д.
[0048] Соответственно, в одном варианте реализации отслеживаемые целевые объекты включают в себя по меньшей мере шланг 36 аппарата ИВЛ, при этом по меньшей мере одно обнаруженное изменение содержит изменение радиуса изгиба шланга 36 аппарата ИВЛ. Изменение радиуса изгиба шланга 36 аппарата ИВЛ включает в себя переход между (i) первым радиусом изгиба, соответствующим выпрямленному шлангу аппарата ИВЛ (ФИГ. 7 (A)), и (ii) вторым радиусом изгиба, соответствующим невыпрямленному или изогнутому шлангу аппарата ИВЛ (ФИГ. 7 (B)). Обнаруженное изменение в радиусе изгиба шланга аппарата ИВЛ может быть с прямого на изогнутое или с изогнутого на прямое и т. д. Кроме того, алгоритм формирования состава газа может дополнительно включать в себя входные данные по коэффициенту трения, основанному на радиусе изгиба, для обеспечения компенсации в контуре ИВЛ при изменении ориентации шланга аппарата ИВЛ.
[0049] В соответствии с другим вариантом реализации показанный на ФИГ. 8 способ 160 обеспечения ИВЛ пациенту с использованием устройства системы аппарата ИВЛ с отслеживанием компонентов контура ИВЛ на этапе 162 обеспечивает источник аппарата ИВЛ, имеющий выходное отверстие для выдачи газа для ИВЛ. Выходное отверстие выполнено с возможностью присоединения, посредством первого множества компонентов для ИВЛ, к контуру ИВЛ между источником аппарата ИВЛ и пациентом. Способ также включает на этапе 164 захват посредством камеры изображений по меньшей мере двух или более из следующих объектов: (i) источника вентилятора, (ii) одного или более из первого множества компонентов для ИВЛ и (iii) пациента; на этапе 166 обеспечение базы данных, которая содержит изображения в нескольких проекциях второго множества компонентов для ИВЛ, предварительно одобренных для использования вместе по меньшей мере с источником аппарата ИВЛ; на этапе 168 посредством контроллера приведение в действие источника аппарата ИВЛ с рабочими параметрами для выдачи газа для ИВЛ с одним или более свойствами ИВЛ, причем контроллер функционально соединен с источником аппарата ИВЛ, камерой и базой данных.
[0050] В реализации способа контроллер содержит по меньшей мере (i) модуль управления, (ii) модуль распознавания и идентификации компонентов, (iii) модуль отслеживания компонентов, выполненный с возможностью отслеживания целевых объектов в множестве изображений в реальном времени, захватываемых камерой, и возможностью обнаружения по меньшей мере одного изменения в отслеживаемых целевых объектах, и (iv) и модуль компенсации ИВЛ. Рабочие параметры определяют как функцию по меньшей мере от (i) алгоритма формирования состава газа, (ii) выходных данных модуля распознавания и идентификации компонентов и (iii) и выходных данных модуля компенсации ИВЛ, определяемых как функция от выходных данных модуля отслеживания компонентов.
[0051] Способ на этапе 170 дополнительно включает анализ посредством модуля распознавания и идентификации компонентов по меньшей мере одного захваченного изображения для распознавания или идентифицирования по меньшей мере двух или более из следующих объектов: (i) источника аппарата ИВЛ, (ii) одного или более компонентов из первого множества компонентов аппарата ИВЛ и (iii) одной или более характеристик пациента. Выходные данные модуля распознавания и идентификации компонентов содержат данные, указывающие на распознанные или идентифицированные по меньшей мере два или более из следующих объектов: (i) источника аппарата ИВЛ, (ii) одного или более компонентов из первого множества компонентов аппарата ИВЛ и (iii) одной или более характеристик пациента.
[0052] Способ на этапе 172 дополнительно включает отслеживание целевых объектов посредством модуля отслеживания целевых объектов, причем отслеживаемые целевые объекты включают в себя два или более из следующих объектов: (a) распознанного или идентифицированного источника аппарата ИВЛ, (b) распознанных или идентифицированных одного или более компонентов из первого множества компонентов аппарата ИВЛ, (c) распознанных или идентифицированных одной или более характеристик пациента и (d) и одной или более их взаимосвязей, соединений или физических состояний. Кроме того, способ дополнительно включает обнаружение, посредством модуля отслеживания компонентов, по меньшей мере одного изменения в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов. Выходные данные модуля отслеживания компонентов содержат данные, указывающие по меньшей мере на одно обнаруженное изменение в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов.
[0053] Кроме того, способ на этапе 174 дополнительно включает выполнение посредством модуля компенсации ИВЛ и генерирования сигналов тревоги при обнаружении по меньшей мере одного изменения в взаимосвязях, соединениях или физических состояниях отслеживаемых целевых объектов по меньшей мере одного действия, выбранного из группы, состоящей из (i) изменения по меньшей мере одних входных данных для алгоритма формирования состава газа при обнаружении по меньшей мере одного изменения в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов и (ii) генерирования внутреннего сигнала тревоги для осуществления алгоритма диагностики аппарата ИВЛ. В одном варианте реализации выходные данные модуля компенсации ИВЛ содержат данные, указывающие на измененные по меньшей мере одни входные данные для алгоритма формирования состава газа. В другом варианте реализации выходные данные модуля компенсации ИВЛ являются входными данными непосредственно для алгоритма формирования состава газа для изменения плотности газа для ИВЛ, выдаваемого в контур ИВЛ.
[0054] Еще в одном варианте реализации отслеживаемые целевые объекты содержат по меньшей мере шланг аппарата ИВЛ, при этом по меньшей мере одно обнаруженное изменение представляет собой изменение радиуса изгиба шланга аппарата ИВЛ. Изменение радиуса изгиба шланга аппарата ИВЛ представляет собой переход между (i) первым радиусом изгиба, соответствующим выпрямленному шлангу аппарата ИВЛ, и (ii) вторым радиусом изгиба, соответствующим невыпрямленному или изогнутому шлангу аппарата ИВЛ. В другом варианте реализации алгоритм формирования состава газа дополнительно включает в себя входные данные по компенсации коэффициента трения в контуре ИВЛ при обнаружении изменения в радиусе изгиба шланга аппарата ИВЛ.
[0055] В соответствии с еще одним вариантом отслеживаемые целевые объекты содержат (i) одно или более соединений в контуре ИВЛ между выходным отверстием источника аппарата ИВЛ, соединенным с шланговой манжетой трубопровода аппарата ИВЛ, трубопроводом аппарата ИВЛ, соединенным с устройством взаимодействия с пациентом, и устройством взаимодействия с пациентом, присоединенным к пациенту. Кроме того, в число обнаруживаемых изменений входит разъединение по меньшей мере одного из одного или более соединений или (ii) одна или более характеристик пациента. Одна или более характеристик могут включать в себя по меньшей мере одно из цвета пациента и движений стенки грудной клетки пациента. Кроме того, по меньшей мере одно обнаруженное изменение может включать в себя по меньшей мере одно из изменения цвета пациента сверх пороговой величины и изменения движений стенки грудной клетки пациента сверх другой пороговой величины.
[0056] Понятно, что модули, описанные в настоящем документе могут быть также компьютерными программными модулями, которые представлены на некратковременном (non-transitory) компьютерочитаемом носителе. Другими словами, другой вариант реализации настоящего изобретения включает в себя некратковременный (non-transitory) компьютерочитаемый носитель, реализованный вместе с компьютерной программой, состоящей из инструкций, выполненных с возможностью исполнения процессором и предназначенных для того, чтобы их исполнение приводило к осуществлению процессором способа обеспечения ИВЛ пациенту с использованием отслеживания компонентов контура ИВЛ, как обсуждалось в настоящем документе.
[0057] Хотя выше подробно описаны лишь несколько примеров реализации, специалистам в данной области техники совершенно понятно, что в примерах реализации возможны множество модификаций без существенного отклонения от новых идей и преимуществ этих вариантов реализации настоящего изобретения. Например, варианты реализации настоящего изобретения могут эффективно использоваться в областях применения устройств для борьбы с апноэ во время сна. Соответственно, все такие модификации должны входить в объем вариантов реализации настоящего изобретения, как определено в следующей формуле изобретения. В формуле изобретения пункты «средство плюс функция» предназначены для охвата структур, описанных в настоящем документе как выполняющих излагаемую функцию, и не только структурных эквивалентов, но и эквивалентных структур.
[0058] Кроме того, любые заключенные в скобки ссылочные позиции в одном или более пунктах не должны толковаться как ограничивающие эти пункты. Слово «содержащий» или «содержит» и т. п. не исключает наличия элементов или этапов, кроме перечисленных в любом пункте формулы изобретения или в описании изобретения в целом. Упоминание элемента в единственном числе не исключает использования его во множественном числе и наоборот. Один или более вариантов реализации могут быть осуществлены посредством оборудования, содержащего несколько различных элементов, и посредством соответствующим образом запрограммированного компьютера. В описывающем устройство пункте, перечисляющем несколько средств, некоторые из этих средств могут быть реализованы одним и тем же элементом оборудования. Сам факт того, что определенные меры изложены во взаимно отличающихся различных пунктах формулы, не означает того, комбинация этих мер не может быть использована эффективно.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ МОНИТОРИНГА ПАЦИЕНТА | 2015 |
|
RU2679864C2 |
| СИСТЕМА И СПОСОБ ОТСЛЕЖИВАНИЯ ЦЕЛЕВОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ ПОКАЗАТЕЛЯ КАЧЕСТВА ВО ВРЕМЯ ЛУЧЕВОЙ ТЕРАПИИ | 2016 |
|
RU2696428C2 |
| СИСТЕМА РАСПОЗНАВАНИЯ ПОВЕДЕНИЯ | 2008 |
|
RU2475853C2 |
| СПОСОБ, ТЕРМИНАЛ И СИСТЕМА ДЛЯ БИОМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ | 2023 |
|
RU2815689C1 |
| СИСТЕМА, УСТРОЙСТВО И СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ПОЛОЖЕНИЯ И ОРИЕНТАЦИИ ТРАНСПОРТНОГО СРЕДСТВА, ПОГРУЗОЧНОГО УСТРОЙСТВА И ГРУЗА ПРИ РАБОТЕ ПОГРУЗОЧНОГО УСТРОЙСТВА | 2012 |
|
RU2623295C2 |
| АДАПТИВНОЕ ФОРМИРОВАНИЕ ИЗОБРАЖЕНИЙ И ОПТИМИЗАЦИЯ ЧАСТОТЫ КАДРОВ НА ОСНОВЕ РАСПОЗНАВАНИЯ ФОРМЫ МЕДИЦИНСКИХ ИНСТРУМЕНТОВ В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2011 |
|
RU2726159C2 |
| СПОСОБ, ТЕРМИНАЛ И СИСТЕМА ДЛЯ БИОМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ | 2022 |
|
RU2798179C1 |
| АНАЛИТИЧЕСКАЯ СИСТЕМА РАСПОЗНАВАНИЯ | 2014 |
|
RU2760211C2 |
| МОДУЛЬНЫЙ КОМПЛЕКС КОНТРОЛЯ ПРОИЗВОДСТВЕННОЙ БЕЗОПАСНОСТИ И ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ | 2020 |
|
RU2746652C1 |
| Система и способ дистанционного измерения физиологических параметров | 2021 |
|
RU2770155C1 |



Группа изобретений относится к медицинской технике, а именно к устройству (10) для системы на основе аппарата искусственной вентиляции легких (ИВЛ) с отслеживанием компонентов контура ИВЛ, способу обеспечения ИВЛ пациенту с использованием устройства. Устройство (10) выполнено с возможностью обеспечения ИВЛ во время применения ИВЛ. Устройство содержит источник (12) аппарата ИВЛ, имеющий выходное отверстие (52), выполненное с возможностью выдачи газа для ИВЛ и с возможностью подсоединения посредством первых компонентов для ИВЛ к контуру (34) ИВЛ между источником (12) аппарата ИВЛ и пациентом (40). Устройство включает камеру (14), выполненную с возможностью захвата изображений (i) источника (12) аппарата ИВЛ, (ii) одного или более компонентов (36, 38, 44, 46, 48, 50) из первых компонентов для ИВЛ и (iii) пациента (40). Устройство имеет базу (16) данных изображений в проекциях вторых компонентов для ИВЛ, предварительно одобренных для использования с источником (12) аппарата ИВЛ. Устройство включает контроллер (20), функционально соединенный с источником (12) аппарата ИВЛ, камерой (14) и базой (16) данных. Контроллер включает в себя (i) модуль (22) управления, (ii) модуль (24) распознавания и идентификации компонентов, (iii) модуль (26) отслеживания компонентов, выполненный с возможностью отслеживания целевых объектов в изображениях в реальном времени, захватываемых камерой (14), и обнаружения изменения в отслеживаемых целевых объектах, и (iv) модуль (28) компенсации ИВЛ. Модуль (22) управления выполнен с возможностью управления работой источника (12) аппарата ИВЛ с помощью рабочих параметров, определяемых как функция от (i) алгоритма формирования состава газа, (ii) выходных данных модуля (24) распознавания и идентификации компонентов и (iii) выходных данных модуля (28) компенсации ИВЛ, определяемых как функция от выходных данных модуля (26) отслеживания компонентов, причем в ответ на рабочие параметры источник (12) ИВЛ выдает газ для ИВЛ с одним или более свойствами ИВЛ. Способ включает обеспечение источника аппарата ИВЛ. Способ предусматривает захват посредством камеры изображений двух или более из следующих объектов: (i) источника аппарата ИВЛ, (ii) одного или более компонентов из первых компонентов для ИВЛ и (iii) пациента. Способ включает обеспечение базы данных, которая содержит изображения в проекциях вторых компонентов для ИВЛ, предварительно одобренные для использования с источником аппарата ИВЛ. Способ включает управление посредством контроллера работой источника аппарата ИВЛ с помощью рабочих параметров для выдачи газа для ИВЛ с одним или более свойствами ИВЛ. Контроллер функционально соединен с источником аппарата ИВЛ, камерой и базой данных и включает в себя (i) модуль управления, (ii) модуль распознавания и идентификации компонентов, (iii) модуль отслеживания компонентов, выполненный с возможностью отслеживания целевых объектов в изображениях в реальном времени, захватываемых камерой, и обнаружения изменения в отслеживаемых целевых объектах, и (iv) модуль компенсации ИВЛ. Рабочие параметры определены как функция от (i) алгоритма формирования состава газа, (ii) выходных данных модуля распознавания и идентификации компонентов и (iii) выходных данных модуля компенсации ИВЛ, определяемых как функция от выходных данных модуля отслеживания компонентов. Техническим результатом является точное лечебное воздействие автоматически без необходимости в калибровке или программировании пользователем аппарата ИВЛ для компенсации контура ИВЛ и устройства взаимодействия с пациентом. 2 н. и 13 з.п. ф-лы, 8 ил.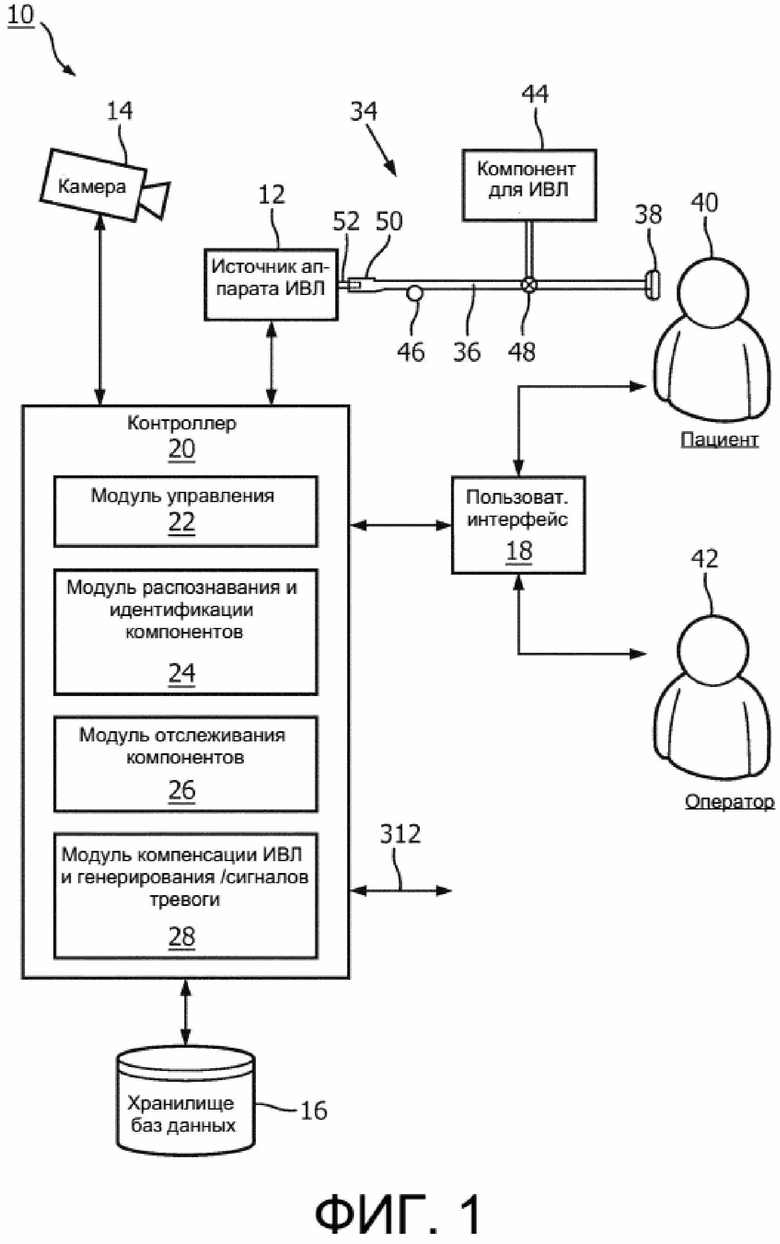
1. Устройство (10) для системы на основе аппарата искусственной вентиляции легких (ИВЛ) с отслеживанием компонентов контура ИВЛ, выполненное с возможностью обеспечения ИВЛ во время применения ИВЛ и содержащее:
источник (12) аппарата ИВЛ, имеющий выходное отверстие (52), выполненное с возможностью выдачи газа для ИВЛ и с возможностью подсоединения посредством первых компонентов для ИВЛ к контуру (34) ИВЛ между источником (12) аппарата ИВЛ и пациентом (40);
камеру (14), выполненную с возможностью захвата изображений по меньшей мере двух или более из следующих объектов: (i) источника (12) аппарата ИВЛ, (ii) одного или более компонентов (36, 38, 44, 46, 48, 50) из первых компонентов для ИВЛ и (iii) пациента (40);
базу (16) данных изображений в проекциях по меньшей мере вторых компонентов для ИВЛ, предварительно одобренных для использования по меньшей мере с источником (12) аппарата ИВЛ; и
контроллер (20), функционально соединенный с источником (12) аппарата ИВЛ, камерой (14) и базой (16) данных, причем контроллер включает в себя по меньшей мере (i) модуль (22) управления, (ii) модуль (24) распознавания и идентификации компонентов, (iii) модуль (26) отслеживания компонентов, выполненный с возможностью отслеживания целевых объектов в изображениях в реальном времени, захватываемых камерой (14), и обнаружения по меньшей мере одного изменения в отслеживаемых целевых объектах, и (iv) модуль (28) компенсации ИВЛ,
при этом модуль (22) управления выполнен с возможностью управления работой источника (12) аппарата ИВЛ с помощью рабочих параметров, определяемых как функция по меньшей мере от (i) алгоритма формирования состава газа, (ii) выходных данных модуля (24) распознавания и идентификации компонентов и (iii) выходных данных модуля (28) компенсации ИВЛ, определяемых как функция от выходных данных модуля (26) отслеживания компонентов, причем в ответ на рабочие параметры источник (12) ИВЛ выдает газ для ИВЛ с одним или более свойствами ИВЛ.
2. Устройство (10) для системы на основе аппарата ИВЛ по п. 1, в котором модуль (24) распознавания и идентификации компонентов выполнен с возможностью распознавания и идентификации на захваченном изображении, посредством по меньшей мере сравнения с шаблонами с помощью изображений в проекциях из базы (16) данных, по меньшей мере двух или более из следующих объектов: (i) источника (12) аппарата ИВЛ, (ii) одного или более компонентов (36, 38, 44, 46, 48, 50) из первых компонентов аппарата ИВЛ и (iii) одной или более характеристик пациента (40),
причем выходные данные модуля (24) распознавания и идентификации компонентов включают в себя данные, указывающие на распознанные и идентифицированные по меньшей мере два или более из следующих объектов: (i) источника (12) аппарата ИВЛ, (ii) одного или более компонентов (36, 38, 44, 46, 48, 50) из первых компонентов аппарата ИВЛ и (iii) одной или более характеристик пациента (40).
3. Устройство (10) для системы на основе аппарата ИВЛ по п. 2, в котором отслеживаемые целевые объекты включают в себя два или более из следующих объектов: (а) распознанного и идентифицированного источника (12) аппарата ИВЛ, (b) распознанных и идентифицированных одного или более компонентов (36, 38, 44, 46, 48, 50) из первых компонентов аппарата ИВЛ, (с) распознанных и идентифицированных одной или более характеристик пациента (40) и (d) одной или более их взаимосвязей, соединений или физических состояний,
причем модуль отслеживания компонентов также выполнен с возможностью обнаружения по меньшей мере одного изменения в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов, а
выходные данные модуля (26) отслеживания компонентов включают в себя данные, указывающие по меньшей мере на одно обнаруженное изменение в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов.
4. Устройство (10) для системы на основе аппарата ИВЛ по п. 3, в котором модуль (28) компенсации ИВЛ выполнен с возможностью выполнения по меньшей мере одного действия, выбранного из группы, состоящей из:
(i) изменения по меньшей мере одних входных данных для алгоритма формирования состава газа при обнаружении по меньшей мере одного изменения в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов,
причем выходные данные модуля (28) компенсации ИВЛ включают в себя данные, указывающие на измененные по меньшей мере одни входные данные для алгоритма формирования состава газа, и
(ii) генерирования внутреннего сигнала тревоги, при этом модуль (22) управления дополнительно выполнен с возможностью осуществления алгоритма диагностики аппарата ИВЛ в ответ на внутренний сигнал тревоги.
5. Устройство (10) для системы на основе аппарата ИВЛ по п. 1, в котором отслеживаемые целевые объекты включают в себя по меньшей мере шланг (36) аппарата ИВЛ, а указанное по меньшей мере одно обнаруженное изменение содержит изменение радиуса изгиба шланга (36) аппарата ИВЛ.
6. Устройство (10) для системы на основе аппарата ИВЛ по п. 5, в котором изменение радиуса изгиба шланга (36) аппарата ИВЛ включает в себя переход между (i) первым радиусом изгиба, соответствующим выпрямленному шлангу аппарата ИВЛ, и (ii) вторым радиусом изгиба, соответствующим невыпрямленному шлангу аппарата ИВЛ.
7. Устройство (10) для системы на основе аппарата ИВЛ по п. 1, в котором отслеживаемые целевые объекты содержат одно или более соединений в контуре (34) ИВЛ между выходным отверстием (52) источника (12) аппарата ИВЛ, соединенным с шланговой манжетой (50) трубопровода (36) аппарата ИВЛ, причем трубопровод аппарата ИВЛ присоединен к устройству (38) взаимодействия с пациентом, соединенному с пациентом (40), а указанное по меньшей мере одно обнаруженное изменение содержит разъединение по меньшей мере одного или более соединений.
8. Устройство (10) для системы на основе аппарата ИВЛ по п. 1, в котором отслеживаемые целевые объекты содержат одну или более характеристик пациента (40), которые включают в себя по меньшей мере одно из цвета пациента и движений стенки грудной клетки,
причем указанное по меньшей мере одно обнаруженное изменение включает в себя по меньшей мере одно из изменения цвета пациента сверх пороговой величины и изменения движений стенки грудной клетки пациента сверх другой пороговой величины.
9. Способ обеспечения ИВЛ пациенту с использованием устройства для системы на основе аппарата ИВЛ с отслеживанием компонентов контура ИВЛ, включающий:
обеспечение источника аппарата ИВЛ, имеющего выходное отверстие для выдачи газа для ИВЛ, выполненное с возможностью присоединения посредством первых компонентов для ИВЛ к контуру ИВЛ между источником аппарата ИВЛ и пациентом;
захват посредством камеры изображений по меньшей мере двух или более из следующих объектов: (i) источника аппарата ИВЛ, (ii) одного или более компонентов из первых компонентов для ИВЛ и (iii) пациента;
обеспечение базы данных, которая содержит изображения в проекциях вторых компонентов для ИВЛ, предварительно одобренные для использования по меньшей мере с источником аппарата ИВЛ; и
управление посредством контроллера работой источника аппарата ИВЛ с помощью рабочих параметров для выдачи газа для ИВЛ с одним или более свойствами ИВЛ,
при этом контроллер функционально соединен с источником аппарата ИВЛ, камерой и базой данных и включает в себя по меньшей мере (i) модуль управления, (ii) модуль распознавания и идентификации компонентов, (iii) модуль отслеживания компонентов, выполненный с возможностью отслеживания целевых объектов в изображениях в реальном времени, захватываемых камерой, и обнаружения по меньшей мере одного изменения в отслеживаемых целевых объектах, и (iv) модуль компенсации ИВЛ,
при этом рабочие параметры определены как функция по меньшей мере от (i) алгоритма формирования состава газа, (ii) выходных данных модуля распознавания и идентификации компонентов и (iii) выходных данных модуля компенсации ИВЛ, определяемых как функция от выходных данных модуля отслеживания компонентов.
10. Способ по п. 9, дополнительно включающий анализ, посредством модуля распознавания и идентификации, по меньшей мере одного захваченного изображения для распознавания и идентификации по меньшей мере двух или более из следующих объектов: (i) источника аппарата ИВЛ, (ii) одного или более компонентов из первых компонентов аппарата ИВЛ и (iii) одной или более характеристик пациента,
причем выходные данные модуля распознавания и идентификации компонентов включают в себя данные, указывающие на распознанные и идентифицированные по меньшей мере два или более из следующих объектов: (i) источника аппарата ИВЛ, (ii) одного или более компонентов из первых компонентов аппарата ИВЛ и (iii) одной или более характеристик пациента.
11. Способ по п. 10, дополнительно включающий отслеживание целевых объектов посредством модуля отслеживания компонентов,
причем отслеживаемые целевые объекты включают в себя по меньшей мере два или более из следующих объектов: (а) распознанного и идентифицированного источника аппарата ИВЛ, (b) распознанных и идентифицированных одного или более компонентов из первых компонентов аппарата ИВЛ, (с) распознанных и идентифицированных одной или более характеристик пациента и (d) одной или более их взаимосвязей, соединений или физических состояний, а также
обнаружение посредством модуля отслеживания компонентов по меньшей мере одного изменения в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов,
причем выходные данные модуля отслеживания компонентов включают в себя данные, указывающие на упомянутое по меньшей мере одно обнаруженное изменение в указанных одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов.
12. Способ по п. 11, дополнительно включающий, при обнаружении по меньшей мере одного изменения в взаимосвязях, соединениях или физических состояниях отслеживаемых целевых объектов, выполнение, посредством модуля компенсации ИВЛ и генерирования сигналов тревоги, по меньшей мере одного действия, выбранного из группы, состоящей из:
(i) изменения по меньшей мере одних входных данных для алгоритма формирования состава газа при обнаружении по меньшей мере одного изменения в одной или более взаимосвязей, соединений или физических состояний отслеживаемых целевых объектов, причем выходные данные модуля компенсации ИВЛ включают в себя данные, указывающие на измененные по меньшей мере одни входные данные для алгоритма формирования состава газа, и
(ii) генерирования внутреннего сигнала тревоги для осуществления алгоритма диагностики аппарата ИВЛ.
13. Способ по п. 12, в котором выходные данные модуля компенсации ИВЛ являются входными данными непосредственно для алгоритма формирования состава газа для изменения плотности газа для ИВЛ, выдаваемого в контур ИВЛ.
14. Способ по п. 9, в котором отслеживаемые целевые объекты включают в себя по меньшей мере шланг аппарата ИВЛ, а указанное по меньшей мере одно обнаруживаемое изменение содержит изменение радиуса изгиба шланга аппарата ИВЛ.
15. Способ по п. 14, в котором изменение радиуса изгиба шланга аппарата ИВЛ включает переход между (i) первым радиусом изгиба, соответствующим выпрямленному шлангу аппарата ИВЛ, и (ii) вторым радиусом изгиба, соответствующим невыпрямленному шлангу аппарата ИВЛ.
| US 2016095998 A1, 07.04.2016 | |||
| US 2011043628 A1, 24.02.2011 | |||
| US 2013255682 A1, 03.10.2013 | |||
| ЛАРИНГОСКОП С ЭЛЕКТРОННО-УПРАВЛЯЕМОЙ СТРУЙНОЙ ВЫСОКОЧАСТОТНОЙ ВЕНТИЛЯЦИЕЙ ЛЕГКИХ | 2011 |
|
RU2564833C2 |

