ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системе беспроводного контроля, а точнее к системе контроля состояния ёмкостей, основанной на Интернете вещей (IoT), и может быть использовано для повышения эффективности эксплуатации различных ёмкостей вне зависимости от их типа, назначения и/или вида их содержимого, в частности за счёт дистанционного сбора различных данных о состоянии ёмкостей, в том числе в режиме реального времени, и автоматизации процессов обслуживания ёмкостей.
УРОВЕНЬ ТЕХНИКИ
Помимо общего тренда на автоматизацию управления различными устройствами ключевым фактором, определяющим быстрое развитие интернета вещей, является значительное повышение уровня проникновения услуг связи и передачи данных, а также пропускной способности сетей и скорости обработки данных. Общее количество подключённых к сетям устройств, оснащённых различными «умными» сенсорами, датчиками и т.п., по различным экспертным оценкам составляет от 17 до 24 млрд., при этом тенденция к быстрому росту сохраняется на протяжении последних лет - по прогнозам аналитиков количество устройств IoT к 2030 г. может вырасти до 46 млрд. единиц.
Одной из наиболее перспективных сфер для внедрения IoT является система «умный город» в связи с тем, что автоматизация управления транспортом, жилищно-коммунальным хозяйством и другими отраслями приобретает особую актуальность в крупных городах, т.к. постоянный контроль различных устройств и систем и возможность удалённого управления ими позволяет оптимизировать использование энергетических, трудовых, транспортных и других ресурсов, снижать аварийность, а также в режиме реального времени выявлять и решать проблемы, требующие оперативного реагирования.
Значимым фактором, оказывающим влияние на развитие интернета вещей, в том числе в таких отраслях как логистика и коммунальное хозяйство, является также необходимость обеспечения безопасности, в том числе экологической, и, следовательно, постоянного контроля за состоянием и перемещением взрыво- и пожароопасных объектов, ёмкостей с ядовитыми и вредными веществами и материалами, ёмкостей с бытовыми, медицинскими, строительными и др. отходами, в том числе с точки зрения рисков перегрева, возгорания и/или выделения вредных веществ, и других ёмкостей.
Таким образом, в связи с общей тенденцией к автоматизации управления и внедрению IoT в различные отрасли промышленности и коммунального хозяйства, а также со значительным обострением экологических проблем, связанных с отходами и загрязнением окружающей среды, существует потребность в техническом решении, обеспечивающем оперативное, в том числе в режиме реального времени, получение и анализ полных, точных и достоверных данных о состоянии различных ёмкостей вне зависимости от их типа, назначения ёмкостей и/или вида их содержимого.
Из уровня техники известны различные технические решения, реализующие функции контроля состояния ёмкости.
В частности, из патента RU 2649150, 30.03.2018, МПК B65F 1/14, G01F 23/00, известен способ обслуживания мусорного контейнера, включающий установку датчиков, определение факта заполнения контейнера, определение температуры в контейнере и передачу данных на удалённый компьютер, из патента RU 204381, 21.05.2021, МПК B65F 1/14, G01F 23/28, известно устройство для дистанционного контроля за состоянием мусорных контейнеров, а из патента RU 2722576, 01.06.2020, МПК B65F 1/14; G01F 23/00, известен способ автоматизированного беспроводного мониторинга наполнения и очистки мусорного контейнера и устройство для его осуществления.
Недостатком указанных способов и устройств является необходимость специальной настройки или конфигурирования и инициализации датчиков специалистом или оператором при установке в ёмкости, включая задание диапазона расстояний, размеров ёмкостей и др. параметров. В частности, в RU 2649150 датчик заполнения устанавливают на боковую стенку контейнера у верхнего края, проводят инициализацию датчика заполнения, определяют эталонное расстояние до противоположной стенки контейнера. В RU204381 устройство для дистанционного контроля за состоянием мусорных контейнеров устанавливают на боковую или верхнюю стенку мусорного контейнера, например, контейнера для твёрдых бытовых отходов, который должен быть пустым на момент установки, и выполняют его конфигурирование и инициализацию. В RU 2722576 перед установкой устройства на контейнере проводят подготовку устройства к работе в соответствии с рекомендациями производителя, в том числе настройку периодичности отправки сообщений, подготовку (образование специальных отверстий в стенках для вставок) и установку ИК-прозрачных вставок в стенках контейнера.
Известные способы дистанционного контроля различных параметров мусорных контейнеров, таких как: степень наполнения мусорного контейнера, температура внутри контейнера, местоположение мусорного контейнера, факт его переворота и т.п., реализуются при беспроводных датчиков различного типа, в том числе датчиков температуры, акселерометров, а также датчиков наполненности, использующих инфракрасные, ультразвуковые, СВЧ, лазерные, фотоэлектрические, тензометрические датчики, определяющие такие параметры как наполненность контейнеров, температуру внутри них, факт переворота. Полученные данные передают на серверы с целью обработки и анализа информации о различных параметрах мусорных контейнеров (например, в патентах RU 2649150, RU 2739076 и RU 2646886, 12.03.2018, МПК B65F 3/00, B65F 5/00).
Также известны устройства измерения уровня наполнения контейнеров для твёрдых бытовых отходов (ТБО), основанные на оптических, инфракрасных (ИК) и/или ультразвуковых (УЗ) датчиках (например, в патентах EP 2641851, 25.09.2013, МПК B65F1/00, G01F23/00, RU204381, 21.05.2021, МПК B65F1/14, G01F23/28).
Недостатками оптического способа контроля наполненности с использованием известных устройств являются, во-первых, высокая вероятность ложного сигнала о заполнении контейнера в случае попадания какого-либо предмета локально в зону действия датчика при наличии достаточного места в контейнере в целом, во-вторых, повышенная чувствительность оптических датчиков к загрязнению, что приводит к снижению качества работы датчиков и увеличению расходов на их обслуживание.
Ультразвуковые датчики (например, в патентах EP2641851, RU204381) также осуществляют измерение расстояния в одной точке от точки излучения до ближайшего объекта в контейнере/ёмкости. Очевидно, что в связи с тем, что твёрдые бытовые отходы могут иметь различные размеры и форму и размещаться в контейнере случайным образом, в том числе вблизи датчика, возможны ситуации ложного сигнала о заполнении, т.к. ультразвуковой датчик будет реагировать на ближайший к нему объект даже в случае недостаточной заполненности контейнера в целом. При этом решение с использованием нескольких датчиков, описанное, в частности, в патенте EP2641851, повышает точность определения уровня заполнения контейнера, но, очевидно, увеличивает стоимость внедрения и эксплуатации системы контроля за счёт увеличения количества используемых датчиков.
Инфракрасные датчики (например, в патентах RU175025, 16.11.2017, МПК B65B1/14, B65F1/00, и RU2722576) предполагают установку устройства для контроля в составе системы «приёмник - излучатель» на противоположных стенках контейнера. В частности, в патенте RU2722576 указывается, что на одной стенке устанавливают импульсный излучатель, а на другой - импульсный приёмник, с помощью по меньшей мере одного ИК излучателя периодически излучают вдоль открытого края контейнера пакет ИК импульсов, а с помощью по меньшей мере одного ИК-приёмника принимают этот пакет импульсов. Такое расположение является существенным недостатком при использовании в ёмкостях, заполнение которых возможно не только относительно равномерно распределяющимися материалами (например, жидкие и/или сыпучие материалы), но и предметами/объектами разнообразной формы (например, бытовые, промышленные и строительные отходы), т.к. высока вероятность перекрытия линии «излучатель - приёмник» каким-либо предметом и, следовательно, формирования ложного сигнала от устройства о достижении максимально допустимого уровня наполнения контейнера.
Кроме того, общими недостатками для всех вышеперечисленных типов датчиков являются:
1) необходимость наличия «прозрачного окна» в определённых спектрах излучения, что не позволяет размещать датчики в едином сплошном ударопрочном корпусе и, таким образом, ограничивает возможности их применения и/или повышает стоимость использования по причине повышенного риска повреждения зоны датчиков при использовании для контроля состояния контейнеров для твёрдых бытовых, строительных и иных аналогичных видов отходов;
2) значительные ограничения применения указанных типов датчиков для измерения уровня наполненности ёмкостей, содержащих сыпучие материалы, особенно мелких фракций (зерно, мука, песок, цемент и др.) в связи с тем, что высокая концентрация взвешенных мелких частиц (пыли) в ёмкости, особенно при загрузке/разгрузке и/или перемещении ёмкости, приводит к невозможности измерения расстояний до содержимого ёмкости и/или существенным искажениям измерений, а также к значительным затратам на дополнительную очистку, настройку и иные виды технического обслуживания датчиков и устройств контроля состояния ёмкостей в целом;
3) отсутствие возможностей определять материал или вид содержимого ёмкости, что не позволяет выявлять события заполнения ёмкости незапланированным содержимым и направлять соответствующие сигналы операторам.
Из уровня техники также известна система дистанционного контроля за мусорными контейнерами (патент RU2381162, 10.02.2010, МПК B65F1/14; G08B25/10), включающая блоки идентификации, измерительно-передающий блок, включающий в себя сигнальные датчики, приёмник GPS-сигналов, блок преобразования информации, блок управления, дуплексер, приёмо-передающую антенну, передатчик и приёмник электромагнитного сигнала, а также автономный источник питания. Существенным недостатком данной системы является необходимость взвешивания контейнера, а также определение необходимости опустошения/вывоза контейнера расчётным путём на основе данных о весе мусора, находящегося в контейнере, а не об объёме его заполнения, что может привести к получению операторами искажённой информации о необходимости опустошения/вывоза контейнера и, следовательно, к значительному увеличению расходов на обслуживание контейнеров, в том числе за счёт необходимости взвешивания контейнеров и использования, согласно патенту, автомобиля-мусоросборщика с возможностью взвешивания на разгрузочном или засыпном устройстве до и после процесса опорожнения для определения веса содержащегося в контейнере мусора.
Из патента EP3215814, 13.09.2017, МПК B65F1/14, G01F23/00, G06Q10/00, также известна система контроля и передачи данных об уровне заполнения контейнера, содержащая сервер и измерительное устройство, устанавливаемое на контейнер. Наиболее существенным недостатком данного решения является использование схемы взаимодействия измерительного устройства (датчиков) с сервером, при которой микроконтроллер и приёмопередающее устройство находятся обычно в неактивном режиме, а модель взаимодействия датчика с сервером предполагает определённый график связи датчика с сервером и заранее определённый уровень скорости заполнения для контейнера - такая реализация не позволяет контролировать состояние контейнера в режиме реального времени и оперативно реагировать на события, связанные не только с изменением уровня заполнения контейнера.
Из уровня техники также известны другие системы контроля заполненности и/или состояния контейнеров для бытовых отходов/мусора (заявки CN111056185, 24.04.2020, МПК B65F1/14, CN105752557, 13.07.2016, МПК, B65F1/14, B65F1/16, CN105752557, 13.07.2016, МПК B65F1/14, B65F1/16, CN105752546, 13.07.2016, МПК B65F1/00), реализуемые в том числе с использованием обмена данными между контейнерами и центральным сервером при помощи сетей беспроводной связи. Общим недостатком таких решений является ограничение сферы их применения только контейнерами для сбора мусора или бытовых отходов, что снижает эффективность их использования, во-первых, логистическими и сервисными организациями, обеспечивающими транспортировку и (или) обслуживание ёмкостей различного функционального назначения, во-вторых, управляющими и/или контролирующими организациями в рамках масштабных региональных и/или отраслевых систем («умный город» и т.п.), т.к. ограничивает возможности интеграции данных решений в более общую инфраструктуру транспорта и коммунального хозяйства, оптимальное функционирование которой подразумевает учёт и контроль состояния не только контейнеров для мусора и/или бытовых отходов, но и других ёмкостей, включая специальные контейнеры для строительных, производственных, медицинских и других отходов, ёмкости для хранения топлива, реагентов и других веществ, требующих особых условий контроля, особенно в условиях крупных населённых пунктов или агломераций.
Из уровня техники также известны различные решения, обеспечивающие контроль уровня жидкости в цистернах, баках и др., в частности, датчики уровня топлива и др. Ключевым недостатком решений, обеспечивающих контроль уровня жидкости в ёмкостях, является ограниченность их функционала и, следовательно, существенные ограничения возможностей использования для ёмкостей, заполнение которых возможно не только жидкостями.
Общими недостатками для всех указанных выше решений являются:
1) недостаточная универсальность применения для контроля состояния ёмкостей различного типа с любым возможным содержимым, и, как следствие, существенные ограничения возможностей их использования в распределённых и/или единых системах масштаба регионов и/или крупных населённых пунктов или агломераций;
2) отсутствие возможности взаимодействия датчиков или устройств контроля, расположенных рядом, например, в радиусе действия связи по технологии Bluetooth и/или Wi-Fi, между собой и/или с внешними информационными системами при отсутствии связи с центральным сервером или блоком управления.
Технической проблемой, решение которой обеспечивается настоящим изобретением, является необходимость устранения всех вышеперечисленных недостатков уровня техники, а также необходимость создания системы, способной обеспечить контроль состояния ёмкости вне зависимости от функционального назначения ёмкости и/или вида её содержимого, а также при наличии проблем со связью устройства контроля состояния ёмкости, установленного в ёмкости, с центральным сервером и/или блоком управления.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Решение указанной технической проблемы обеспечивается настоящим изобретением.
Ниже представлено упрощённое раскрытие сущности изобретения, чтобы обеспечить базовое понимание некоторых аспектов одного или более вариантов осуществления представленных идей. Это раскрытие сущности изобретения не является развёрнутым обзором и не предназначено для полного описания ключевых или критических элементов представленных идей и не определяет границы раскрытия настоящего изобретения. Наоборот, его основной целью является представление одной или более концепций в упрощённой форме в качестве вступления к разделу «Осуществление изобретения», представленному ниже.
Техническим результатом настоящего изобретения является повышение эффективности контроля состояния ёмкостей.
Технический результат обеспечивается системой контроля состояния ёмкости, охарактеризованной следующими признаками. Система контроля состояния ёмкости содержит по меньшей мере одно устройство контроля состояния ёмкости, выполненное с возможностью установки в ёмкость и содержащее по меньшей мере один датчик контроля состояния ёмкости для получения данных о состоянии ёмкости, приёмопередающий модуль для приёма и передачи данных о состоянии ёмкости, идентификационный модуль для идентификации устройства контроля состояния ёмкости и блок питания устройства контроля состояния ёмкости, а также содержит блок управления указанной системой контроля состояния ёмкости, выполненный с возможностью связи с указанным по меньшей мере одним устройством контроля состояния ёмкости для обмена данными посредством основного канала беспроводной связи или посредством резервного канала беспроводной связи при отсутствии возможности обмена данными о состоянии ёмкости по основному каналу беспроводной связи, и носимое устройство оператора, выполненное с возможностью идентификации указанного по меньшей мере одного устройства контроля состояния ёмкости с помощью идентификационного модуля и выполненное с возможностью связи с указанным по меньшей мере одним устройством контроля состояния ёмкости посредством канала беспроводной связи малого радиуса действия для обмена данными о состоянии ёмкости и с возможностью связи с блоком управления системой посредством канала беспроводной связи для обмена данными о состоянии ёмкости при отсутствии возможности обмена данными о состоянии ёмкости по основному каналу беспроводной связи и резервному каналу беспроводной связи.
Благодаря настоящему изобретению повышение эффективности контроля состояния различных ёмкостей обеспечивается вне зависимости от типа ёмкости, её назначения и/или вида её содержимого, а также обеспечивается повышение оперативности, полноты, точности и достоверности предоставляемых данных о состоянии ёмкостей, в том числе в режиме реального времени, результаты обработки которых могут быть использованы для принятия решений о действиях в отношении отдельной ёмкости, группы ёмкостей и/или иных элементов системы контроля состояния ёмкости, а также для значительного снижения затрат времени, трудовых и иных ресурсов на обслуживание ёмкостей за счёт автоматизации контроля их состояния и соответствующей оптимизации сервисных, логистических и иных бизнес-процессов в организациях, владеющих различными ёмкостями и/или обслуживающих значительные количества различных ёмкостей.
В одном варианте реализации указанное по меньшей мере одно устройство контроля состояния ёмкости содержит энергонезависимую память для хранения полученных данных о состоянии ёмкости при отсутствии возможности обмена данными о состоянии ёмкости по основному каналу беспроводной связи и резервному каналу беспроводной связи.
В ещё одном варианте реализации указанное по меньшей мере одно устройство контроля состояния ёмкости содержит по меньшей мере одно управляющее устройство для управления элементами ёмкости.
В ещё одном варианте реализации носимое устройство оператора также выполнено с возможностью настройки и контроля параметров по меньшей мере одного устройства контроля состояния ёмкости.
В ещё одном варианте реализации по меньшей мере один датчик для контроля состояния ёмкости выбран из следующего: датчик определения степени наполненности ёмкости, датчик температуры, датчик положения ёмкости в пространстве, датчик для определения местоположения, датчик вскрытия ёмкости, датчик удара, датчик движения, видеокамера, датчик газоанализатора.
В ещё одном варианте реализации система также содержит по меньшей мере одну внешнюю информационную систему для хранения и обработки данных, полученных от указанного по меньшей мере одного устройства контроля состояния ёмкости, блока управления системой и/или носимого устройства оператора.
В ещё одном варианте реализации блок управления системой содержит по меньшей мере один блок из следующих блоков: блок приёма и передачи данных о состоянии ёмкости, блок обработки данных, блок визуализации данных, блок хранения данных, блок интерфейсов, блок администрирования.
В ещё одном варианте реализации указанное по меньшей мере одно устройство контроля состояния ёмкости также содержит обрабатывающий модуль для обработки данных, полученных указанным по меньшей мере одним датчиком контроля состояния ёмкости.
В ещё одном варианте реализации указанный приёмопередающий модуль содержит интегрированный электронный модуль идентификации абонента, например, eSIM.
В ещё одном варианте реализации система содержит по меньшей мере два устройства контроля состояния ёмкости, связанных между собой посредством локальной сети, одно их которых является главным по отношению к другому и выполнено с возможностью обмена данными с другим устройством контроля состояния ёмкости для последующего обмена данными, включающими данные всех связанных устройств контроля состояния ёмкости, с элементами системы контроля состояния ёмкости, такими как блок управления системой контроля состояния ёмкости, носимое устройство оператора и/или внешняя информационная система.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопровождающие фигуры чертежей, включённые в качестве составляющей части в настоящее описание, иллюстрируют варианты осуществления представленных идей и вместе с описанием служат для объяснения принципов раскрытия настоящего изобретения. Необходимо отметить, что фигуры далее демонстрируют лишь некоторые варианты осуществления настоящего изобретения, которые могут быть изменены и скомбинированы без отступления от сущности изобретения.
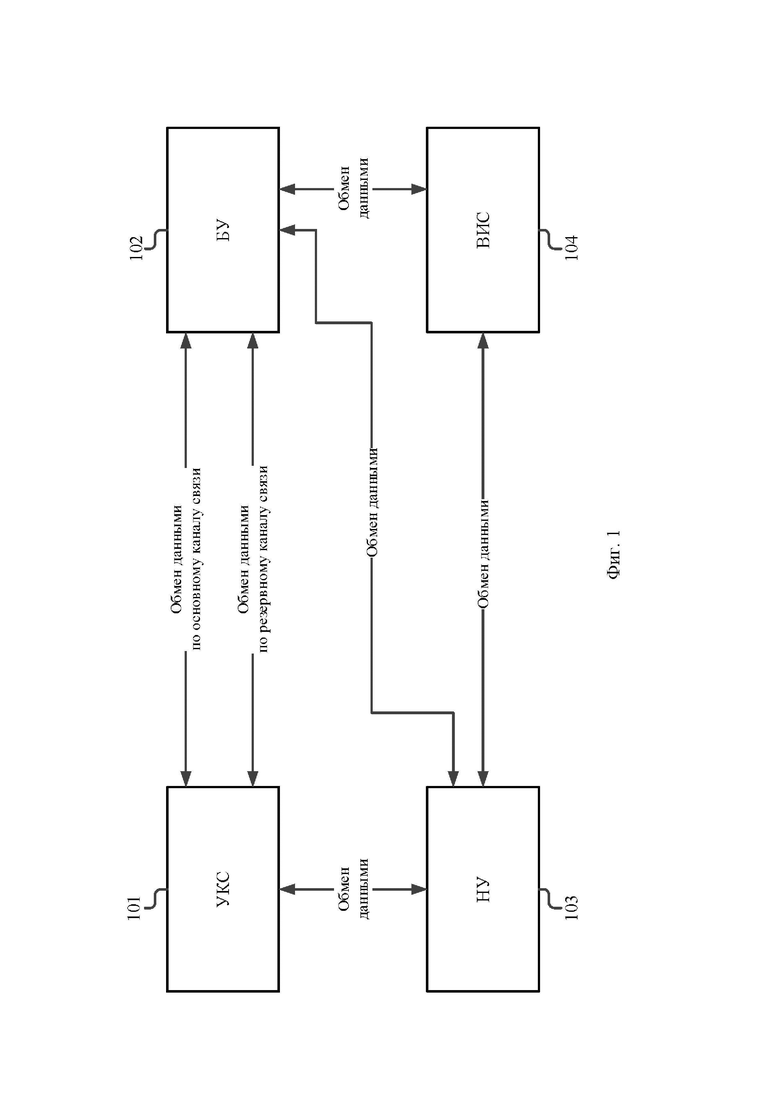
На фиг. 1 представлена схема варианта реализации системы контроля состояния ёмкости.
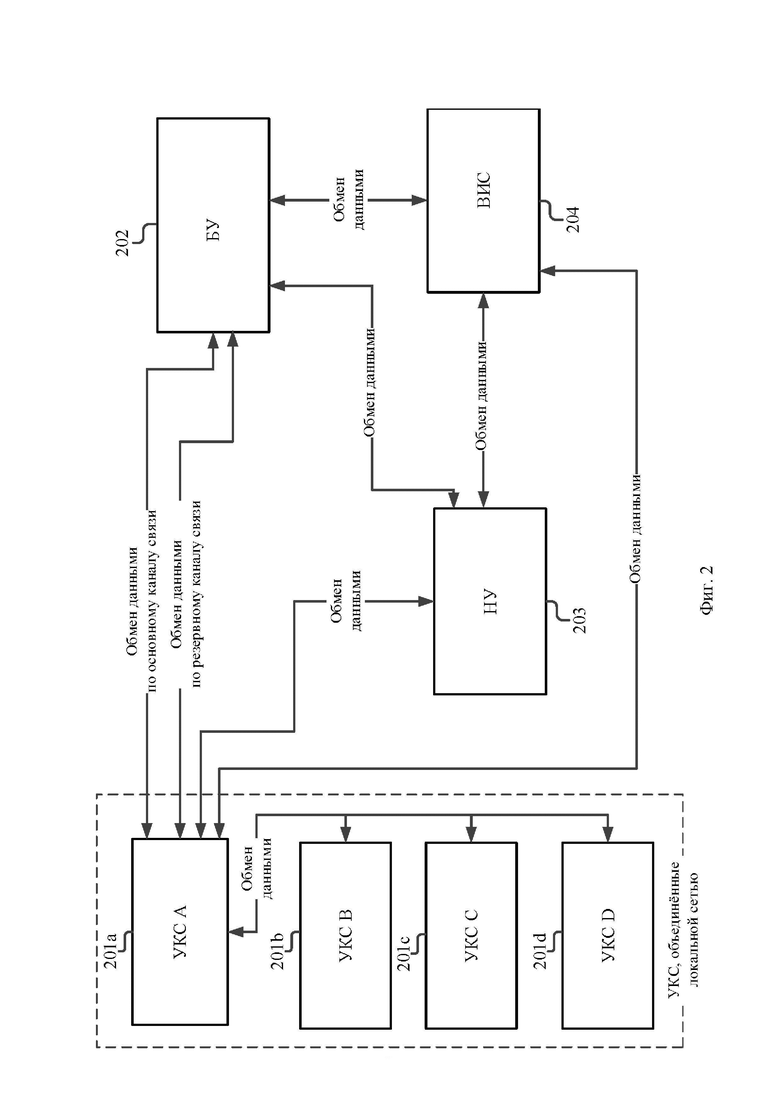
На фиг. 2 представлена схема ещё одного варианта реализации системы контроля состояния ёмкости.
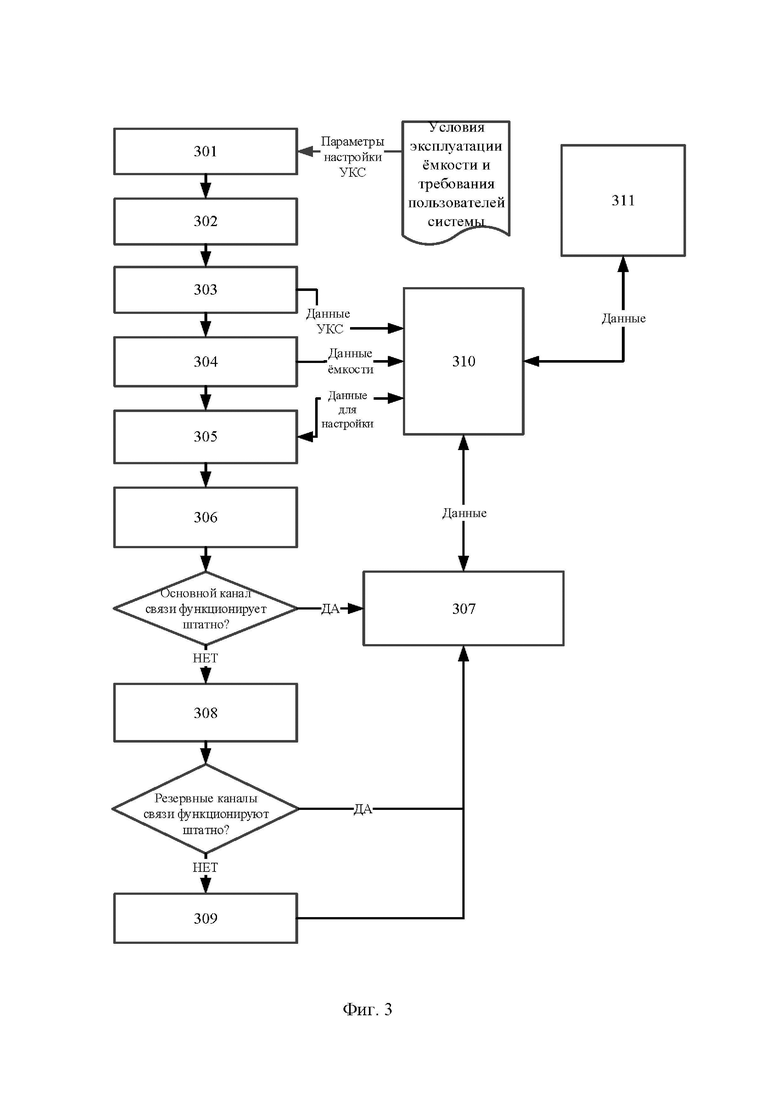
На фиг. 3 представлена общая блок-схема функционирования системы контроля состояния ёмкостей, показанной на фиг. 1.
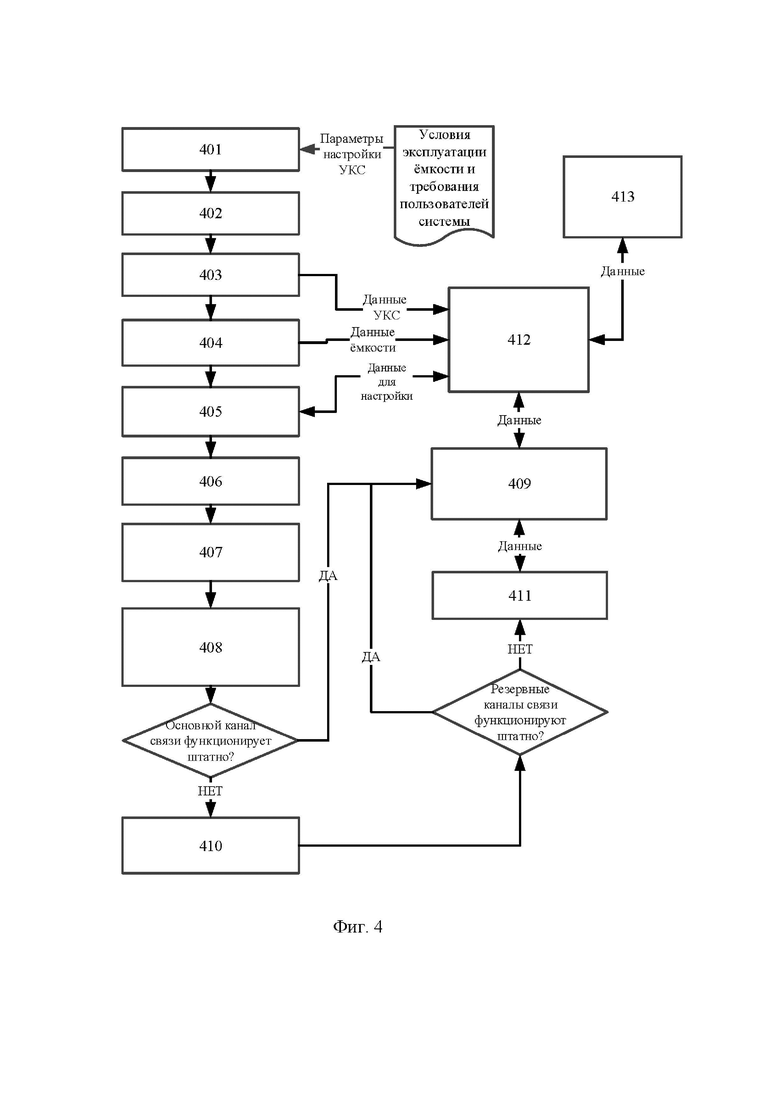
На фиг. 4 представлена общая блок-схема функционирования системы контроля состояния ёмкостей, показанной на фиг. 2.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее будут подробно описаны варианты осуществления предложенного изобретения, примеры которых проиллюстрированы на сопроводительных фигурах чертежей.
На фиг. 1 показан один из вариантов реализации системы контроля состояния ёмкостей. Система содержит устройство (101) контроля состояния ёмкости (далее - УКС), устанавливаемое непосредственно в ёмкости, например, посредством прикрепления к конструктивным элементам ёмкости, предназначенное для сбора данных о состоянии ёмкости и обмена такими данными. УКС (101) содержит по меньшей мере один датчик контроля состояния ёмкости, который может представлять собой, но не ограничиваясь: a) датчик определения степени наполненности ёмкости, который может быть реализован в виде радарного датчика, для измерения расстояний от датчика до содержимого ёмкости и передачи соответствующего сигнала и/или результата измерения, например датчик, основанный на принципах импульсной радиолокации (например высокоточный импульсный радиолокационный датчик ближнего радиуса действия, выполненный в виде однокристальной системы в корпусе); такой радарный датчик позволяет эффективно определять не только степень наполненности ёмкости вне зависимости от вида содержимого, но и наличие определённых материалов в содержимом ёмкости; b) датчик положения ёмкости в пространстве, который может быть реализован в виде акселерометра, для определения события изменения положения УКС (101) в пространстве и передачи соответствующего сигнала и/или результата измерения, например, в случае отклонений от заданных значений положения, например, в случае критического уровня наклона ёмкости или её переворота, опрокидывания, некорректной установки в исходное положение после разгрузки/опустошения ёмкости и др.; c) датчик температуры для измерения температуры внутри ёмкости и передачи соответствующего сигнала и/или результата измерения, например, в случае превышения критического уровня температуры, например, в случае перегрева и/или возгорания внутри ёмкости; d) датчик для определения местоположения (геопозиционирования) ёмкости, например приёмник для определения местоположения (геопозиционирования) ёмкости, реализованный с использованием спутниковых навигационных систем GPS, ГЛОНАСС и других, а также любым иным способом, позволяющим определять местоположение ёмкости, и передачи соответствующего сигнала и/или результата измерения, например, в случае несанкционированного перемещении ёмкости за пределы заданной области/территории, отклонения от заданного маршрута и/или скорости перемещения при транспортировке ёмкости, включая внеплановые остановки, изменения уровня наполнения, например при разгрузке или погрузке, в незапланированных местах и др.; e) датчик вскрытия ёмкости для обеспечения контроля вскрытия ёмкости и передачи соответствующего сигнала и/или результата измерения, например, в случае несанкционированного вскрытия, при этом под несанкционированным вскрытием может пониматься любое событие перемещения части конструкции ёмкости, предназначенной для обеспечения стандартного доступа внутрь ёмкости без нарушения её целостности (например, крышки, дверцы, люка и др.), происшедшее в условиях, отличающихся от заданных для данной ёмкости, включая, но не ограничиваясь: вскрытие не в установленное время (вне расписания), вскрытие вне определённого места и/или границ территории; f) датчик удара для формирования и передачи соответствующего сигнала и/или результата измерения, например, в случае удара по ёмкости, её деформации; g) датчик движения, например, реализованный в виде инфракрасного, ультразвукового, фотоэлектрического, микроволнового и других датчиков или любым иным способом, позволяющим определить движение или перемещение объектов внутри ёмкости, для контроля перемещения объектов в ёмкости и передачи соответствующего сигнала и/или результата измерения, например, о событии наличия людей или животных в ёмкости, неожиданного перемещения частей содержимого ёмкости и др.; h) видеокамера, в частности микровидеокамера, для передачи видео- и/или фотоматериалов о состоянии ёмкости и/или её содержимого, например, по запросу, по расписанию или по наступлению определённого события; i) датчик газоанализатора для определения наличия и/или уровня содержания/концентрации определённых газообразных веществ внутри ёмкости и передачи соответствующего сигнала и/или результата измерения, например, о наличии, уровне и/или превышении предельно допустимой концентрации определённых газообразных веществ в ёмкости. Посредством указанных или иных датчиков также может быть обеспечено определение материала и/или вида содержимого ёмкости с целью выявления событий заполнения ёмкости незапланированным содержимым (например, наличие металла в ёмкости для сбора пластика при раздельном сборе отходов или нехарактерного содержимого в бункере для зерна). Посредством указанных или иных датчиков также может быть обеспечено определение наличия и/или уровня концентрации определённых веществ в ёмкости с целью выявления событий заполнения ёмкости незапланированным содержимым и/или превышения уровня концентрации определённых веществ и передачи соответствующего сигнала и/или результата измерения. Датчики могут быть размещены как в едином ударопрочном влагозащищённом корпусе со степенью защиты не менее IP67, так и в виде отдельных блоков, объединённых посредством проводной или беспроводной связи. Степень наполненности ёмкости может быть рассчитана, например, посредством определения расстояния до содержимого ёмкости (веществ/объектов, размещаемых в ёмкости) и затем представлена: a) в процентах от максимально допустимого уровня, задаваемого при установке устройства и/или после установки, в том числе с задаваемым уровнем дискретности, b) в натуральных единицах измерения объёма, в том числе с задаваемым уровнем дискретности.
УКС (101) также содержит идентификационный модуль для идентификации УКС (101), например, реализованный в виде RFID-метки, активной NFC-метки или любым иным способом или сочетанием способов, позволяющим однозначно идентифицировать УКС (101) бесконтактным способом без необходимости осуществления доступа внутрь ёмкости. Идентификационный модуль обеспечивает присвоение УКС (101) уникального идентификатора (ID) и возможность его бесконтактного считывания, например, носимым устройством (103) оператора, специальным сканером и/или иным устройством. Наличие идентификационного модуля позволяет обеспечить следующие возможности, включая, но не ограничиваясь:
i. присвоение УКС (101) и ёмкости различных обозначений/кодов/параметров и управление ими (дополнение, изменение, удаление и др.), с обеспечением формирования, хранения и предоставления определённого набора сведений о ёмкости в соответствии с требованиями владельца и/или обслуживающей организации;
ii. идентификацию УКС (101) и ёмкости, в том числе в режиме реального времени, как операторами системы контроля состояния ёмкости, так и внешними организациями, такими как оперативные и аварийные службы, службы экологического мониторинга и др., с обеспечением для любой ёмкости, контролируемой системой контроля состояния ёмкости, оперативного определения её владельца и/или обслуживающей организации, назначения и состава содержимого, сроков и условий обслуживания, например опустошения/наполнения, вывоза, дезинфекции и др., а также других свойств и/или параметров;
iii. классификацию и группировку УКС (101) с целью инвентаризации и учёта ёмкостей и организации в системе контроля состояния ёмкости взаимодействия не только с отдельными УКС (101), но и с группами УКС (101), сформированными по определённым признакам;
УКС (101) также содержит по меньшей мере один приёмопередающий модуль, например радиомодуль, для приёма и передачи данных о состоянии ёмкости и обеспечения взаимодействия с другими приёмопередающими модулями, например радиомодулями, выполненный с возможностью беспроводной передачи данных, например, по мобильным сетям передачи данных, например, GSM/NB-IoT, и/или при помощи иных соответствующих беспроводных технологий, включая, но не ограничиваясь: Wi-Fi, WiMAX, Bluetooth, ZigBee, Z-Wave, или иными способами. Приёмопередающий модуль обеспечивает обмен данными между всеми элементами УКС (101) и системы. Приёмопередающий модуль может быть выполнен с возможностью установки по меньшей мере одного идентификационного модуля абонента (SIM - Subscriber Identification Module) в виде как стандартной «физической» SIM-карты, так и интегрированного электронного модуля (embedded SIM или eSIM).
Кроме того, УКС (101) может содержать одно или множество управляющих устройств, в частности микроконтроллеров, обеспечивающих управление элементами и/или устройствами ёмкости, позволяющими изменять её состояние в зависимости от данных, получаемых от одного или множества датчиков УКС (101), и/или иными устройствами, функционирование которых связано с данными, получаемыми от УКС (101). Управляющие устройства могут обеспечивать управление следующими элементами и/или устройствами ёмкости, включая, но не ограничиваясь: a) привод(ы), обеспечивающий(ие) открытие/закрытие крышки, задвижки, люка и других конструкционных элементов ёмкости, обеспечивающих доступ к содержимому ёмкости и/или возможности заполнения/опустошения ёмкости; b) запирающие и аналогичные устройства, например, для обеспечения блокировки в определённом положении крышки, задвижки, люка и аналогичных элементов с целью предотвращения переполнения ёмкости по достижении максимально допустимого уровня; c) сигнальные устройства и/или элементы, информирующие пользователей и/или операторов системы об определённых событиях, например, средства подъёма флажка над заполненной ёмкостью, изменения цветовой маркировки ёмкости или отдельных её элементов и др.; d) устройства, обеспечивающие включение/выключение по меньшей мере одного датчика и/или модуля или иного элемента УКС (101); e) устройства, обеспечивающие изменение положения датчика, модуля или иного элемента УКС (101); f) иные устройства, выполняющие другие определённые функции и/или действия в зависимости от состояния ёмкости, например, включение/отключение устройств наполнения/опустошения ёмкости по достижении определённого уровня опустошения/наполнения, включение/выключение насосов, вентиляторов, начало/завершение погрузки/выгрузки содержимого ёмкости, начало/прекращение движения транспортного средства и/или иного устройства, на котором установлена ёмкость, и др.
Реализация взаимодействия указанных управляющих устройств с управляемыми устройствами возможна как непосредственно между элементами УКС (101) и/или ёмкости и/или внешними устройствами в автоматическом режиме без участия блока (102) управления системой, так и посредством обмена данными и командами с блоком (102) управления системой и/или носимым устройством (103) оператора, в том числе в автоматическом режиме по событиям и в «ручном» режиме в соответствии с командами оператора. При этом при любом варианте реализации данные о командах управляющих устройств и результатах их исполнения управляющими устройствами поступают в блок (102) управления системой и/или средства хранения данных для обработки, анализа и хранения.
УКС (101) также содержит блок питания УКС (101), выполненный в зависимости от условий размещения ёмкости и общих требований к системе в следующих вариантах и/или их сочетании: a) с использованием аккумуляторной батареи в качестве основного источника питания; b) с возможностью подключения к стационарным сетям электропитания c) с возможностью подключения к стационарным сетям электропитания в качестве основного источника и c использованием аккумуляторной батареи в качестве резервного источника питания в случае отключения основного источника; d) с возможностью установки и подключения автономных возобновляемых источников питания на базе альтернативной энергетики, например солнечной батареи, ветрогенератора, микроГЭС и др., в качестве основного или резервного источников питания.
При этом при любом варианте реализации может быть обеспечена возможность передачи на блок (102) управления системой данных о состоянии электропитания, напряжении, уровне заряда аккумуляторной батареи и других параметрах, а также сигнала о наступлении определённых событий, например падения напряжения, низкого уровня заряда батареи, отключения источника питания, изменения схемы питания с основного источника на резервный и обратно и др.
Согласно варианту реализации, показанному на фиг. 1, система контроля состояния ёмкости содержит блок (102) управления указанной системой (далее - БУ), например, реализованный в виде центрального сервера, предназначенный среди прочего для сбора, обработки, хранения и визуализации данных, получаемых от УКС (101) и других элементов системы, а также для управления УКС (101) и всей системой в целом.
БУ (102) представляет собой комплекс компьютерных устройств и соответствующего программного обеспечения, которые могут быть выполнены в едином корпусе или могут иметь распределённую архитектуру, в том числе с возможностью реализации различных функций на различных устройствах. БУ (102) может включать следующие блоки/подсистемы: a) блок приёма и передачи данных о состоянии ёмкостей для приёма и передачи данных между БУ (102) и остальными элементами системы; b) блок обработки данных для обработки принимаемых данных, проведения необходимых вычислений и анализа, а также направления результатов обработки данных в другие блоки/подсистемы; c) блок визуализации данных для вывода результатов обработки данных в виде, удобном операторам и другим пользователям системы, а также для формирования необходимых информационных панелей, дэшбордов и других средств демонстрации результатов функционирования системы; d) блок хранения данных для хранения данных, в том числе взаимодействия со средствами/системами хранения данных, резервного копирования, архивирования и обеспечения других связанных с хранением сервисов, а также для обеспечения доступа к хранимым данным для других блоков/подсистем; e) блок интерфейсов для обеспечения возможности взаимодействия блоков/подсистем БУ (102) и всех элементов системы между собой; f) блок администрирования для управления настройками БУ (102) и остальных элементов системы, обеспечивающий настройку системы и её элементов, а также управление доступом, администрирование пользователей и другие сервисные функции. БУ (102) взаимодействует с УКС (101) посредством основного канала беспроводной связи и/или резервных каналов беспроводной связи с использованием любых подходящих беспроводных технологий, включая, но не ограничиваясь: мобильные сети передачи данных, например, GSM/NB-IoT, а также технологии Wi-Fi, WiMAX, Bluetooth, ZigBee, Z-Wave и другие. Один из каналов беспроводной связи между УКС (101) и БУ (102) назначают основным при установке УКС (101) в ёмкость и/или при последующей настройке УКС (101), остальные каналы беспроводной связи между УКС (101) и БУ (102) считаются резервными. В случае невозможности обеспечения обмена данными между УКС (101) и БУ (102) с использованием основного канала беспроводной связи УКС (101) переключается на один из резервных каналов беспроводной связи, например, назначенный первым резервным каналом, и предпринимает попытки передать данные по резервному каналу беспроводной связи. В случае невозможности использования указанного резервного канала беспроводной связи УКС (101) предпринимает попытки передать данные по следующему резервному каналу беспроводной связи из списка резервных каналов беспроводной связи. Состав каналов беспроводной связи и порядок их использования, в том числе в случае невозможности передачи данных по основному каналу беспроводной связи, определяют при установке и/или настройке УКС (101) в зависимости от условий размещения ёмкости и/или требований пользователей системы, и они могут быть изменены в дальнейшем в любое время при настройке УКС (101).
Согласно варианту реализации, показанному на фиг. 1, система контроля состояния ёмкости также содержит носимое устройство (103) оператора системы (далее - НУ), предназначенное для идентификации по меньшей мере одного устройства (101) контроля состояния ёмкости, устанавливаемого в ёмкости, настройки и контроля его параметров, а также обеспечения обмена данными и/или иного взаимодействия УКС (101) с БУ (102), в том числе в случае невозможности непосредственного взаимодействия УКС (101) с БУ (102) по основному и резервным каналам беспроводной связи. В качестве НУ (103) может использоваться смартфон/планшет/ноутбук с установленным программным обеспечением, обеспечивающим реализацию функций идентификации, настройки, управления и контроля состояния УКС (101), или специальное устройство, предназначенное исключительно для взаимодействия с УКС (101) и БУ (102). НУ (103) может быть выполнено с возможностью как автоматического взаимодействия с УКС (101), находящимся в зоне его действия, по определённым сценариям, так и ручного взаимодействия в соответствии с командами оператора НУ (103). НУ (103) взаимодействует с БУ (102) с использованием любых подходящих проводных или беспроводных технологий, включая, но не ограничиваясь: мобильные сети передачи данных, например, GSM/NB-IoT, технологии Wi-Fi, WiMAX, Bluetooth, ZigBee, Z-Wave и др. Взаимодействие НУ (103) с УКС (101) обеспечивается предпочтительно посредством канала беспроводной связи малого радиуса действия с использованием любых подходящих беспроводных технологий, включая, но не ограничиваясь: Wi-Fi, WiMAX, Bluetooth, ZigBee, Z-Wave и др., а также может обеспечиваться посредством мобильных сетей передачи данных, например, GSM/NB-IoT и др.
Кроме того, как показано на фиг. 1, система контроля состояния ёмкости может содержать внешние информационные системы (104) (далее - ВИС), включая, но не ограничиваясь: системы хранения и обработки данных (СХОД), охранные, пожарные и другие типы сигнализаций, системы типа «Умный дом», «облачные» хранилища, системы управления услугами в сфере жилищно-коммунального хозяйства, системы управления транспортом и логистикой, биллинговые и/или платёжные системы и сервисы, системы контроля и мониторинга экологических параметров, кризисных/чрезвычайных ситуаций, и другие. ВИС (104) могут осуществлять обмен данными с БУ (102) и/или НУ (103), например, с использованием любых подходящих проводных или беспроводных технологий, включая, но не ограничиваясь: мобильные сети передачи данных, например, GSM/NB-IoT, технологии Wi-Fi, WiMAX, Bluetooth, ZigBee, Z-Wave и др. Кроме того, ВИС (104) могут взаимодействовать с БУ (102) посредством протокола API (Application Programming Interface).
На фиг. 2 показан ещё один вариант реализации системы контроля состояния ёмкостей. В данном варианте система контроля состояния ёмкостей содержит множество устройств (201a), (201b), (201c), (201d) контроля состояния ёмкости, которые могут быть установлены в одной ёмкости в разных местах A, B, C, D, во множестве разных ёмкостей A, B, C, D или во множестве разных ёмкостей в разных местах.
Указанный вариант может использоваться в случае временного или постоянного отсутствия связи отдельных УКС (201a) - (201d) с БУ (202) и/или НУ (203), например, в случае установки части из УКС (201a) - (201d) в местах A, B, C, D ёмкости(ей), где постоянно или временно отсутствует возможность использования основного канала беспроводной связи, например GSM/NB-IoT, Wi-Fi и др., или в случае установки части из УКС (201a) - (201d) в ёмкостях A, B, C, D, находящихся в местах, где постоянно или временно отсутствует возможность использования основного канала беспроводной связи, например, GSM/NB-IoT, Wi-Fi и др.
При данном варианте реализации при настройке определённого УКС, например, УКС (201a) как главного, задают правило о том, что по расписанию или при наступлении определённых условий и/или событий перед сохранением и/или проверкой возможности отправки своего (внутреннего) пакета данных главное УКС (201а) по локальному каналу связи, например, по беспроводному каналу беспроводной связи малого радиуса действия, например, Bluetooth, проверяет своё окружение в поисках пакетов данных от других УКС (201b) - 201d), находящихся в зоне доступа (устойчивой связи), и при обнаружении таких пакетов главное УКС (201а) считывает их по локальной сети, ассоциирует с уникальным идентификатором передающего УКС (201b) - (201d) и отправляет такие пакеты данных после своего пакета или вместе со своим пакетом на БУ (202) и/или НУ (203). В зависимости от условий реализации и настроек УКС и/или системы в целом возможен также вариант реализации данной схемы, при которой главное УКС не назначается при настройке/установке, а все УКС взаимодействуют между собой по каналу беспроводной связи малого радиуса действия, например, Bluetooth, таким образом, что главным становится то УКС, которое на момент необходимости обмена данными с БУ (202) и/или НУ (203) и/или ВИС (204) имеет возможность связи по основному или резервному каналам беспроводной связи, и/или каналу беспроводной связи малого радиуса действия, соответственно, а в случае наличия нескольких УКС, имеющих возможность связи с БУ (202) и/или НУ (203) и/или ВИС (204), главным становится УКС с наиболее качественным на данный момент каналом беспроводной связи.
Вне зависимости от варианта реализации в условиях отсутствия или ограничений постоянной связи УКС (101, 201) с БУ (102, 202) УКС (101, 201) может быть настроено таким образом, что данные или часть данных за длительный период накапливаются в энергонезависимой памяти УКС (101, 201) и передаются на БУ (102, 202) и/или НУ (103, 203) автоматически или по запросу при появлении возможности передачи данных как по основному или резервному каналу беспроводной связи, так и с использованием Bluetooth и/или иных технологий передачи данных малого радиуса действия. Такой вариант реализации может применяться, например, для периодического контроля состояния ёмкостей, установленных в труднодоступных местах, при помощи передачи данных на НУ (103, 203), установленное на транспортном средстве, беспилотном летательном аппарате (дроне) и т.п., например данные могут считываться с УКС (101, 201) при приближении НУ (103, 203) к УКС (101, 201) на расстояние, достаточное для передачи данных по выбранному каналу беспроводной связи.
Вне зависимости от варианта реализации в случае постоянного или временного отсутствия связи УКС (101, 201) или множества УКС (101, 201) с БУ (102, 202) и НУ (103, 203) может быть обеспечена возможность связи по описанному выше сценарию с ВИС (104, 204). Автономное (без участия БУ (102, 202) и НУ (103, 203)) взаимодействие с другими УКС (102, 202) и/или ВИС (104, 204) при отсутствии возможностей взаимодействия с БУ (102, 202) и НУ (103, 203) по описанным каналам беспроводной связи, в том числе с возможностью объединения УКС и/или групп УКС в самоорганизующиеся сети (в т.ч. mesh-сети), обеспечивает своевременную передачу необходимой информации между УКС и/или от УКС непосредственно «внешнему» потребителю такой информации, в том числе ВИС (104, 204), с целью оперативного реагирования на состояние ёмкости, например, информационной системе (бортовому компьютеру) транспортного средства (например, сигнал водителю о заполнении/опустошении бункера комбайна или цистерны) и последующей передачи данных на БУ (102, 202) и/или НУ (103, 203).
Система контроля состояния ёмкостей, показанная на фиг. 1 - 2, может быть оснащена средствами программного обеспечения для взаимодействия всех элементов системы с БУ (102, 202) и между собой, включая, но не ограничиваясь: a) программное обеспечение для УКС (101, 201), в т.ч. для управляющих устройств, одного или множества датчиков и приёмопередающего модуля, обеспечивающее взаимодействие датчиков, управляющих устройств и других элементов УКС (101, 201) между собой, а также УКС (101, 201) с БУ (102, 202) и другими УКС (101, 201); b) программное обеспечение для контроля состояния ёмкостей, в т.ч. для сбора, обработки, анализа и хранения данных, управления УКС (101, 201) и системой в целом; с) программное обеспечение для НУ (103, 203), например, представленное в виде мобильного приложения для смартфонов и планшетов.
При этом при любых вариантах реализации системы контроля состояния ёмкости для оптимизации и повышения эффективности контроля состояния ёмкостей и управления системой в целом возможно использование технологий искусственного интеллекта, нейросетей, машинного обучения и иных средств и/или способов автоматизации настройки используемого оборудования и управления им, сбора, обработки и анализа данных, а также принятия решений.
На фиг. 3 показана общая блок-схема функционирования системы контроля состояния ёмкостей в варианте реализации по фиг. 1. Контроль состояния ёмкостей осуществляют следующим образом. На первом шаге (301) проводят первичную настройку УКС в соответствии с условиями эксплуатации ёмкости, включая но не ограничиваясь: характеристики (форма, глубина и др.) и тип ёмкости, в которой планируется установка УКС, её назначение и предполагаемое содержимое, расположение, условия эксплуатации и другие факторы, а также требованиями пользователей системы, например владельца или обслуживающей организации, по набору, объёму и условиям передачи данных о состоянии ёмкости, включая, но не ограничиваясь: тип, объём и точность собираемых данных; время и/или периодичность сбора и отправки данных; состав и предельные значения параметров, достижение которых считается отклонением от штатного режима функционирования УКС и/или состояния ёмкости; условия или события для формирования и отправки необходимых сигналов в зависимости от состояния ёмкости, например, максимально допустимый уровень наполнения, температура, при которой необходимо внеплановое обслуживание ёмкости, уровень заряда элементов электропитания, перемещение или изменение положения ёмкости и др.; условия и/или события и/или параметры, считающиеся значительным отклонением от штатного или стандартного режима функционирования и/или требующие вмешательства, например, снижение уровня заряда элементов питания ниже критического, отсутствие сигналов УКС в течение определённого времени, несанкционированное вскрытие и/или перемещение ёмкости и др.; условия переключения между основными и резервными каналами беспроводной связи, а также между основным и резервным(и) источником(ами) питания; условия и параметры взаимодействия элементов УКС между собой и с другими УКС при их наличии, а также УКС с БУ, НУ и другими элементами системы.
На следующем шаге (302) УКС устанавливают в ёмкость, затем на шаге (303) оператор идентифицирует УКС при помощи НУ или иным возможным способом, данные о соответствующем УКС, включая его уникальный идентификатор (ID), направляются в БУ и сохраняются в базе(ах) данных блока хранения данных БУ. Если УКС было установлено в ёмкость ранее при производстве и/или ремонте ёмкости, оператор только идентифицирует данное УКС для сохранения сведений о нём в базе(ах) данных. Также возможна автоматическая идентификация и инициализация УКС при установке в ёмкость в зависимости от наличия и конфигурации основных каналов беспроводной связи с БУ, например, при наличии канала беспроводной связи, достаточного для передачи данных от УКС, УКС может передать в БУ пакет данных для идентификации и инициализации самостоятельно без участия оператора.
Затем на шаге (304) ёмкость устанавливают в исходную (базовую, стандартную) позицию и посредством УКС определяют её положение в пространстве, а также при необходимости геопозиционирование, например, для ёмкостей, перемещение которых на значительные расстояния не является штатной/стандартной процедурой, таких как, например, контейнеры для твёрдых бытовых отходов, стационарные бункеры или цистерны и др. Соответствующие данные о ёмкости при помощи УКС и, при необходимости, НУ передаются в БУ для обработки и хранения.
При установке ёмкости в исходную (базовую, стандартную) позицию УКС автоматически определяет своё положение относительно ёмкости (возможны варианты установки на боковые стенки и/или крышки, люки и др. конструкционные элементы ёмкости в зависимости от типа ёмкости, её назначения, требований владельца и/или обслуживающей организации и других факторов) и расстояние до противоположной стенки или дна пустой ёмкости и формирует исходные параметры и иные данные пустой ёмкости, которые передаёт в БУ для хранения и использования. В одной ёмкости может быть установлено более одного УКС. В этом случае УКС взаимодействуют между собой посредством канала беспроводной связи малого радиуса действия, например, Bluetooth, и на основании данных от нескольких УКС, установленных в одной ёмкости, система может не только, например, измерять расстояние до дна и/или противоположной стенки и/или содержимого ёмкости, но и формировать трёхмерную модель (образец) пустой ёмкости, которую в дальнейшем можно использовать в том числе для контроля деформации и/или нарушения целостности ёмкости.
После установки УКС в ёмкости и самой ёмкости в исходную (базовую, стандартную) позицию оператор на следующем шаге (305) проверяет работоспособность УКС, включая связь с НУ и БУ по основным и резервным каналам беспроводной связи, а также при необходимости по вспомогательному каналу беспроводной связи и каналу беспроводной связи малого радиуса действия, и, при необходимости, проводит дополнительную настройку УКС. Проверка и настройка может производиться оператором как удалённо по основным и резервным каналам беспроводной связи, так и при помощи НУ по каналу беспроводной связи малого радиуса действия, например, в условиях отсутствия устойчивой связи с БУ по основному и резервному(ым) каналу(ам) беспроводной связи.
Если по результатам проверки работоспособность УКС подтверждается, установку УКС считают завершённой, все соответствующие данные при помощи УКС и, при необходимости, НУ передаются в БУ для обработки и хранения, УКС в системе получает определённый статус, например, «установлено, функционирует штатно» и продолжает работу в штатном (стандартном) режиме. Кроме того, может быть обеспечена возможность последующих автоматических удалённых самодиагностики и самотестирования УКС и/или его датчиков по расписанию, задаваемому в настройках, или по запросу, а также передачи данных в БУ и/или НУ.
Условия штатного (стандартного) режима работы определяют при установке и/или настройке УКС на шагах (301-305), как было описано выше, в зависимости от типа ёмкостей и/или вида их содержимого, их назначения, расположения, условий эксплуатации и других факторов, а также требований пользователей системы, например, владельца и/или обслуживающей организации.
Далее на фиг. 3 представлен пример штатного (стандартного) режима функционирования системы контроля состояния ёмкости.
На шаге (306) УКС формирует определённые пакеты данных о состоянии ёмкости и УКС, при этом сбор данных и обмен ими может проводиться по каждому из одного или множества датчиков независимо в следующих режимах и/или их сочетаниях в зависимости от настроек УКС и/или требований пользователей системы, включая, но не ограничиваясь:
i. «по расписанию» - сбор данных и обмен ими происходят в определённое время, задаваемое в настройках УКС и/или БУ, при этом система контроля состояния ёмкости обеспечивает возможность установки для каждого датчика, элемента УКС и/или типа данных индивидуального расписания, например, данные о температуре внутри ёмкости при отсутствии превышения заданного уровня могут передаваться 1 раз в час, данные об уровне заполнения ёмкости - каждые 15 минут, а данные об уровне заряда элемента питания - 1 раз в сутки;
ii. «по событию» - сбор данных и обмен ими происходят при условии наступления определённого события, например, в случаях достижения уровня наполнения ёмкости 50% и 90% от максимально допустимого, превышения температуры внутри ёмкости выше предельной, изменения положения ёмкости (наклон, переворот) и др., при этом система контроля состояния ёмкости обеспечивает возможность установки параметров и условий наступления события для каждого из одного или множества датчиков и/или УКС индивидуально;
iii. «по запросу» - сбор данных и обмен ими происходят в ответ на запрос системы контроля состояния ёмкости и/или оператора, при этом запрос может отправляться как автоматически БУ, так и оператором вручную, в т.ч. при помощи НУ; например, при получения сигнала о достижении определённой температуры внутри ёмкости БУ может направить на УКС запрос данных об уровне наполнения ёмкости и/или её положении в пространстве, или при получении сигнала об изменении положения ёмкости в пространстве оператор может вручную направить запрос любых других данных о состоянии ёмкости и/или УКС, чтобы принять решение о необходимых действиях по обслуживанию ёмкости и/или УКС.
Перед отправкой данных о состоянии ёмкости в БУ УКС проверяет состояние основного канала беспроводной связи. Если основной канал беспроводной связи работает штатно, т.е. обеспечивает возможность обмена данными с БУ в соответствии с правилами, требованиями и настройками УКС и системы в целом, то на шаге (307) происходит обмен данными о состоянии ёмкости между УКС и БУ в соответствии с правилами, требованиями и настройками УКС и/или системы в целом.
Если основной канал беспроводной связи не функционирует в штатном режиме, УКС на шаге (308) осуществляет поиск подходящего резервного канала беспроводной связи и в случае если резервный(е) канал(ы) беспроводной связи функционирует(ют) штатно, т.е. обеспечивает(ют) возможности обмена данными, УКС переходит на него для обмена данными.
Если же и резервный(е) канал(ы) беспроводной связи не функционирует(ют) штатно, сбор и обмен данными обеспечивают при помощи НУ на шаге (309).
Вне зависимости от используемого способа обмена данными БУ на шаге (310) получает, обрабатывает, при необходимости анализирует данные при помощи блоков приёма и передачи данных о состоянии ёмкости и обработки данных и при помощи блока визуализации данных информирует оператора посредством БУ и/или НУ о состоянии ёмкости и/или УКС и/или о наступлении определённого события, а также в зависимости от установленных правил и/или настроек может осуществлять обмен данными с УКС и/или НУ.
В зависимости от требований пользователей системы и соответствующих настроек БУ и/или УКС могут также осуществлять обмен данными и/или результатами их обработки и анализа на шаге (311) с внешними информационными системами, в том числе для обеспечения взаимодействия системы контроля состояния ёмкости с другими системами. Например, при установке УКС в ёмкости для сбора зерна зерноуборочного комбайна и настройке взаимодействия системы контроля состояния ёмкости с системой мониторинга транспорта можно обеспечить оптимизацию маршрутов грузовых автомобилей в зависимости от расположения комбайнов и уровня заполнения установленных на комбайнах ёмкостей с зерном.
На фиг. 4 показана общая блок-схема функционирования системы контроля состояния ёмкостей в варианте реализации по фиг. 2, в котором предусмотрен приведённый ранее при описании фиг. 2 сценарий объединения некоторого множества УКС в группу и назначении одного из УКС главным в данной группе для сбора данных и обмена ими с БУ и/или НУ и/или ВИС. В данном варианте реализации шаги (401) - (405) по установке и настройке УКС аналогичны шагам (301) - (305), представленным ранее в описании блок-схемы по фиг. 3. После настройки и проверки работоспособности всех УКС, объединённых в группу, на шаге (406) назначают главное УКС, которое обеспечивает сбор и обмен данными между УКС, объединёнными в группу, и между группой и БУ, НУ и/или ВИС. В зависимости от условий реализации и настроек системы контроля состояния ёмкостей также возможен вариант, при котором выбор и определение главного УКС на шаге (406) происходит каждый раз перед обменом данными с БУ и/или НУ в режимах «по расписанию» и/или «по событию». На шаге (407) УКС, назначенное главным, обеспечивает сбор данных от других УКС, включённых в группу. Затем на шаге (408) главное УКС формирует пакеты данных о состоянии ёмкости(ей) с учётом данных других УКС группы и обеспечивает обмен данными с БУ и/или НУ на шагах (409) - (411) в зависимости от условий функционирования основного и резервного(ых) каналов связи аналогично шагам (307) - (309), указанным ранее при описании блок-схемы по фиг. 3. Обработка, анализ, визуализация и хранение данных в БУ на шаге (412) и обмен данными с ВИС на шаге (413) осуществляются аналогично шагам (310) - (311), указанным ранее при описании блок-схемы по фиг. 3.
Вне зависимости от варианта реализации БУ и УКС в соответствии с требованиями пользователей системы и соответствующими настройками могут обеспечивать различные условия обработки, анализа и хранения данных о состоянии ёмкостей, включая, но не ограничиваясь:
i. кратковременное и долговременное (архивное) хранение любых данных, собираемых системой контроля состояния ёмкости, при помощи блока хранения данных включая, но не ограничиваясь: состояние отдельных датчиков и иных элементов УКС, ёмкостей, настроек, журналы изменений состояния любых элементов системы контроля состояния ёмкости и др.;
ii. анализ и сопоставление данных различных источников и проведение различных расчётов при помощи блока обработки, в том числе в режиме реального времени, обеспечивающих контроль и управление состоянием ёмкостей, например, расчётов скорости наполнения или опустошения ёмкостей для оптимизации параметров обслуживания ёмкостей (график обслуживания, маршруты и др.), включая прогнозирование сроков заполнения и обслуживания ёмкостей в зависимости от характеристик ёмкостей и на основании собранной статистики, определение отклонений от плановой или типичной скорости наполнения или опустошения ёмкостей, которые могут свидетельствовать о нарушении штатного режима функционирования (например, протечка, повреждение, несанкционированная разгрузка и др.) и необходимости принятия срочных мер по ремонту/обслуживанию ёмкости, и др.;
iii. формирование различных производных данных о состоянии ёмкостей и их визуализация при помощи блока визуализации данных в виде отчётов, графиков, схем и др., обеспечивающих оперативное принятие решений и более высокую эффективность управления обслуживанием ёмкостей.
Сопоставление различных данных и параметров, поступающих от датчиков, и расчёт/прогнозирование/определение событий, характеризующихся определённым сочетанием параметров, включает, но не ограничиваясь:
i. сопоставление данных о местоположении ёмкости и уровня наполнения, которое позволяет зафиксировать событие наполнения/опустошения ёмкости вне заданных точек/маршрутов, что может быть актуально при мониторинге перевозки топлива, опасных материалов/грузов, бытовых и других отходов и др.;
ii. сопоставление данных датчиков местоположения, температуры внутри ёмкости и уровня наполнения, которое позволяет выявлять зависимости температуры в ёмкости от расположения, скорости и уровня наполнения и других параметров и оптимизировать условия размещения и обслуживания ёмкостей, в том числе для снижения вероятности перегрева и/или возгорания содержимого ёмкостей;
iii. сопоставление данных датчиков температуры, газоанализатора и, при необходимости, других датчиков, которое позволяет определить условия, при которых происходит выделение и/или превышение допустимого уровня отдельных веществ, и таким образом заранее предпринимать соответствующие меры по снижению рисков возникновения таких условий и/или оперативно устранять такие условия.
При этом система контроля состояния ёмкости может быть реализована с возможностью выполнения расчётов процентов степени наполненности ёмкости и других производных данных и/или параметров как непосредственно на УКС посредством соответствующего обрабатывающего модуля, так и в результате обработки на БУ получаемых от УКС исходных данных.
В случае отсутствия возможности передачи данных с УКС по основным и/или резервным каналам беспроводной связи данные за определённый период накапливаются в энергонезависимой памяти УКС («чёрный ящик»), например, выполненной в виде микросхемы, интегрированной в печатную плату УКС, и обеспечивающей длительность хранения данных при отсутствии электропитания не менее 12 месяцев, и передаются на БУ и/или НУ при появлении возможностей передачи данных, при этом возможны следующие варианты обмена данными и их сочетания, включая, но не ограничиваясь:
i. автоматический обмен накопленными данными за определённый период непосредственно после устранения проблем со связью по основному и/или резервным каналам беспроводной связи;
ii. автоматический обмен накопленными данными за определённый период в следующий плановый временной интервал обмена данными при режиме «по расписанию»;
iii. автоматический обмен накопленными данными за определённый период при подключении УКС к НУ по каналу беспроводной связи малого радиуса действия (Wi-Fi, Bluetooth и др.);
iv. обмен накопленными данными за определённый период, в том числе выборочный, при подключении УКС к НУ по каналу беспроводной связи малого радиуса действия по запросу оператора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСТАНЦИОННОГО РАДИАЦИОННОГО КОНТРОЛЯ (ВАРИАНТЫ} | 2005 |
|
RU2296351C1 |
| Автоматизированный комплекс мониторинга процесса транспортирования нефтепродуктов по наземному сборно-разборному полевому магистральному трубопроводу с соединением "раструб" | 2023 |
|
RU2812007C1 |
| Программно-аппаратный комплекс технических средств пожарной автоматики и охранной сигнализации для подвижных транспортных средств | 2024 |
|
RU2837031C1 |
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЕЗДОМ И ЖЕЛЕЗНОДОРОЖНЫМ ДЕПО | 2014 |
|
RU2640389C1 |
| НАРУЧНЫЙ БИОМЕТРИЧЕСКИЙ ПРИБОР СИСТЕМЫ АВАРИЙНОЙ СИГНАЛИЗАЦИИ ДЛЯ ХОДОВОЙ НАВИГАЦИОННОЙ ВАХТЫ НА МОСТИКЕ | 2022 |
|
RU2791965C1 |
| УЗЕЛ И СПОСОБ ДЛЯ ОБЕСПЕЧЕНИЯ ОБСЛУЖИВАНИЯ БЕСПРОВОДНОГО ТЕРМИНАЛЬНОГО УСТРОЙСТВА МНОЖЕСТВОМ СОТ В КОММУНИКАЦИОННОЙ СЕТИ | 2013 |
|
RU2746922C2 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ И ТРАНСПОРТИРОВКИ ЦЕННОСТЕЙ | 2022 |
|
RU2795124C1 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО, УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИНФОРМАЦИИ И СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ | 2017 |
|
RU2742926C2 |
| Автономный телекоммуникационный комплекс | 2023 |
|
RU2815442C1 |
Настоящее изобретение относится к системе беспроводного контроля, а именно к системе контроля состояния ёмкостей, содержащей по меньшей мере одно устройство контроля состояния ёмкости, выполненное с возможностью установки в ёмкость и содержащее: по меньшей мере один датчик контроля состояния ёмкости для получения данных о состоянии ёмкости, приёмопередающий модуль для приёма и передачи полученных данных о состоянии ёмкости, идентификационный модуль для идентификации устройства контроля состояния ёмкости и блок питания устройства контроля состояния ёмкости, а также содержит блок управления указанной системой контроля состояния ёмкости, выполненный с возможностью связи с указанным по меньшей мере одним устройством контроля состояния ёмкости для обмена данными посредством основного канала беспроводной связи или посредством резервного канала беспроводной связи при отсутствии возможности обмена данными о состоянии ёмкости по основному каналу беспроводной связи, и носимое устройство оператора, выполненное с возможностью идентификации указанного по меньшей мере одного устройства контроля состояния ёмкости с помощью идентификационного модуля и выполненное с возможностью связи с указанным по меньшей мере одним устройством контроля состояния ёмкости посредством канала беспроводной связи малого радиуса действия для обмена данными о состоянии ёмкости и с возможностью связи с блоком управления системой посредством канала беспроводной связи для обмена данными о состоянии ёмкости при отсутствии возможности обмена данными о состоянии ёмкости по основному каналу беспроводной связи и резервному каналу беспроводной связи. Техническим результатом настоящего изобретения является повышение эффективности контроля ёмкостей. 10 з.п. ф-лы, 4 ил.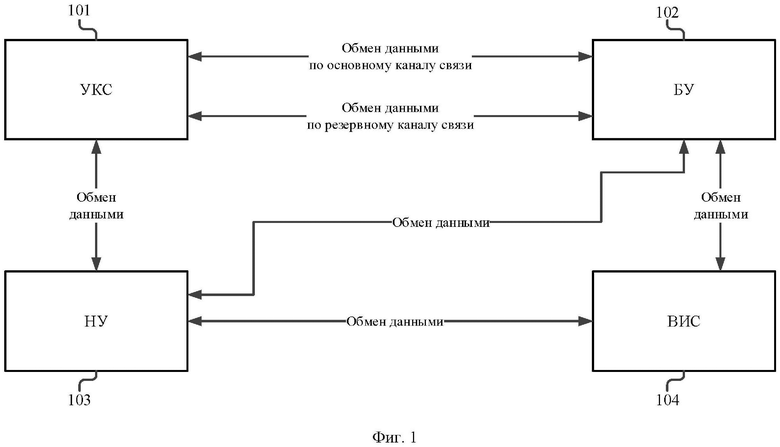
1. Система контроля состояния ёмкости, содержащая: по меньшей мере одно устройство контроля состояния ёмкости, выполненное с возможностью установки в ёмкость и содержащее:
по меньшей мере один датчик контроля состояния ёмкости для получения данных о состоянии ёмкости, приёмопередающий модуль для приёма и передачи полученных данных о состоянии ёмкости, идентификационный модуль для идентификации устройства контроля состояния ёмкости и блок питания устройства контроля состояния ёмкости, а также содержащая блок управления указанной системой контроля состояния ёмкости, выполненный с возможностью связи с указанным по меньшей мере одним устройством контроля состояния ёмкости для обмена данными посредством основного канала беспроводной связи или посредством резервного канала беспроводной связи при отсутствии возможности обмена данными о состоянии ёмкости по основному каналу беспроводной связи, и носимое устройство оператора, выполненное с возможностью идентификации указанного по меньшей мере одного устройства контроля состояния ёмкости с помощью идентификационного модуля и выполненное с возможностью связи с указанным по меньшей мере одним устройством контроля состояния ёмкости посредством канала беспроводной связи малого радиуса действия для обмена данными о состоянии ёмкости и с возможностью связи с блоком управления системой посредством канала беспроводной связи для обмена данными о состоянии ёмкости при отсутствии возможности обмена данными о состоянии ёмкости по основному каналу беспроводной связи и резервному каналу беспроводной связи.
2. Система по п. 1, в которой указанное по меньшей мере одно устройство контроля состояния ёмкости содержит энергонезависимую память для хранения полученных данных о состоянии ёмкости при отсутствии возможности обмена данными о состоянии ёмкости по основному каналу беспроводной связи и резервному каналу беспроводной связи.
3. Система по п. 1, в которой указанное по меньшей мере одно устройство контроля состояния ёмкости содержит по меньшей мере одно управляющее устройство для управления элементами ёмкости.
4. Система по п. 1, в которой носимое устройство оператора также выполнено с возможностью настройки и контроля параметров по меньшей мере одного устройства контроля состояния ёмкости.
5. Система по п. 1, в которой по меньшей мере один датчик для контроля состояния ёмкости выбран из следующего: датчик определения степени наполненности ёмкости, датчик температуры, датчик положения ёмкости в пространстве, датчик для определения местоположения, датчик вскрытия ёмкости, датчик удара, датчик движения, видеокамера, датчик газоанализатора.
6. Система по п. 1, также содержащая по меньшей мере одну внешнюю информационную систему для хранения и обработки данных, полученных от указанного по меньшей мере одного устройства контроля состояния ёмкости, блока управления системой и/или носимого устройства оператора.
7. Система по п. 1, в которой блок управления системой содержит по меньшей мере один блок из следующих блоков: блок приёма и передачи данных о состоянии ёмкости, блок обработки данных, блок визуализации данных, блок хранения данных, блок интерфейсов, блок администрирования.
8. Система по п. 1, в которой указанное по меньшей мере одно устройство контроля состояния ёмкости также содержит обрабатывающий модуль для обработки данных, полученных указанным по меньшей мере одним датчиком контроля состояния ёмкости.
9. Система по п. 1, в которой указанный приёмопередающий модуль содержит интегрированный электронный модуль идентификации абонента.
10. Система по любому из пп. 1-9, которая содержит по меньшей мере два устройства контроля состояния ёмкости, связанных между собой посредством локальной сети, одно их которых является главным по отношению к другому и выполнено с возможностью обмена данными с другим устройством контроля состояния ёмкости для последующего обмена данными, включающими данные всех связанных устройств контроля состояния ёмкости, с элементами системы.
11. Система по п. 5, в которой датчик определения степени наполненности ёмкости представляет собой радарный датчик.
| US 20180197396 A1, 12.07.2018 | |||
| CN 105133877 A, 09.12.2015 | |||
| JP 2002071429 A, 08.03.2002 | |||
| СУДОВОЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИНКЛИНОГРАФ | 0 |
|
SU292060A1 |
