Область техники, к которой относится изобретение
[001] Настоящая технология относится к компьютерным способам и системам для компьютеризированного вождения и, в частности, к способам и системам для определения порядка оценивания траекторий транспортных средств.
Уровень техники
[002] Полностью автоматизированные системы вождения или системы вождения c высокой степенью автоматизации могут предназначаться для управления транспортным средством на дороге без вмешательства водителя (например, в режиме без водителя) или другого внешнего управления. Например, компьютеризированное управление реализовано в самоуправляемых и/или автономных транспортных средствах.
[003] Автономное транспортное средство способно проехать запланированный путь от своего текущего положения до заданного будущего положения без вмешательства (или с минимальным вмешательством) водителя. Находящиеся вблизи или по соседству транспортные средства могут двигаться по своим маршрутам или траекториям, которые могут пересекаться с плановой траекторией автономного транспортного средства. В частности, это относится к тем случаям, когда автономное транспортное средство приближается к перекрестку. Известным решением является подход по заявке CN 105739534 A - «Multi-vehicle cooperative driving method and apparatus for driverless vehicles based on Internet-of-vehicles», опубл. 6 июля 2016 г. В заявке описан способ совместного вождения нескольких транспортных средств и устройство для беспилотных транспортных средств на основе «Интернета транспортных средств». Способ включает в себя получение текущих данных вождения транспортного средства и информации о состоянии дороги в режиме реального времени, получение общих текущих данных вождения и информации о состоянии дороги, передаваемых другими беспилотными транспортными средствами на заданном расстоянии.
[004] Некоторые системы способны формировать плановую траекторию для автономного транспортного средства с целью проезда перекрестка. Тем не менее, для безопасного и эффективного управления на перекрестке или в любом другом месте дороги компьютерные системы для принятия решения должны учитывать приоритет находящихся вблизи или по соседству транспортных средств.
Раскрытие изобретения
[059] Разработчики настоящей технологии обнаружили, что известным решениям присущи недостатки.
[006] По меньшей мере одно потенциальное преимущество настоящей технологии следует из данного описания с учетом представленной на фиг. 5 ситуации. На фиг. 5 приведено графическое представление 500 участка схемы дорог. На фиг. 5 также приведено (а) графическое представление 520, соответствующее первому автономному транспортному средству, и (б) графическое представление 530, соответствующее второму автономному транспортному средству. В этой ситуации на другом участке схемы дорог две полосы движения 502 объединяются в одну полосу движения. Процесс принятия решения первым автономным транспортным средством и вторым автономным транспортным средством может включать в себя определение того, какое транспортное средство должно следовать первым, а какое должно уступить дорогу.
[007] Разработчики настоящей технологии исходят из того, что для обеспечения безопасности на дорогах конструкция автономных транспортных средств ориентирована на избегание риска. Поэтому несмотря на то, что согласно правилам дорожного движения первое автономное транспортное средство имеет преимущество (право проезда в первую очередь) перед вторым автономным транспортным средством, первое автономное транспортное средство все же может решить уступить дорогу второму автономному транспортному средству, поскольку второе транспортное средство находится очень близко. При этом из-за стремления автономных транспортных средств к избеганию риска второе автономное транспортное средство также может решить уступить дорогу первому автономному транспортному средству.
[008] В связи с этим разработчики настоящей технологии установили, что в этой ситуации оба автономных транспортных средства вследствие их стремления к избеганию риска могут начать замедляться, пытаясь уступить дорогу друг другу.
[009] Чтобы избежать подобных действий в парах автономных транспортных средств, разработчики настоящей технологии разработали системы, способные определять порядок оценивания траекторий. Как описано здесь, если такие системы реализованы в обоих автономных транспортных средствах, то оба автономных транспортных средства определяют одинаковый порядок оценивания траекторий. Следует отметить, что не так важно у какого из автономных транспортных средств, у первого или у второго, его предполагаемая траектория будет зависеть от другого транспортного средства (исходя из одного и того же порядка оценивания траекторий). Важно, чтобы благодаря определению одного и того же порядка оценивания траекторий зависимость предполагаемых траекторий определялась одинаково обоими автономными транспортными средствами и поэтому только одно из автономных транспортных средств принимало решение уступить дорогу, в то время как второе автономное транспортное средство принимало решение следовать первым.
[0010] В соответствии с первым аспектом настоящей технологии реализован способ определения порядка оценивания траекторий транспортных средств. Одно из транспортных средств имеет связь с процессором. Процессору доступна информация, указывающая на участок схемы дорог, соответствующий обстановке вокруг одного из транспортных средств, и на правила дорожного движения, связанные с этим участком схемы дорог. Способ выполняется процессором. Способ включает в себя определение процессором пар транспортных средств с пересекающимися потенциальными траекториями на этом участке схемы дорог. Способ включает в себя определение процессором информации о приоритете транспортных средств, указывающей на приоритет транспортных средств на этом участке схемы дорог. Определение включает в себя использование процессором правил дорожного движения для определения того, какое транспортное средство в соответствующей паре транспортных средств имеет преимущество перед другим транспортным средством в соответствующей паре транспортных средств. Способ включает в себя определение процессором на основе информации о приоритете транспортных средств порядка оценивания траекторий транспортных средств на этом участке схемы дорог так, чтобы транспортное средство, имеющее преимущество перед другим транспортным средством согласно информации о приоритете транспортных средств, занимало более высокую позицию в порядке оценивания траекторий, чем другое транспортное средство.
[0011] В некоторых вариантах осуществления способа он дополнительно включает в себя использование процессором порядка оценивания траекторий для определения предполагаемых траекторий транспортных средств на участке схемы дорог так, чтобы (а) по меньшей мере одна предполагаемая траектория данного транспортного средства определялась до определения по меньшей мере одной предполагаемой траектории другого транспортного средства и (б) по меньшей мере одна предполагаемая траектория другого транспортного средства определялась с учетом по меньшей мере одной предполагаемой траектории данного транспортного средства.
[0012] В некоторых вариантах осуществления способа определение информации о приоритете транспортных средств включает в себя формирование процессором графовой структуры, содержащей вершины и ребра. Ребро соединяет пару вершин. Пара вершин указывает на соответствующую пару транспортных средств на участке схемы дорог. Ребро указывает на первое транспортное средство в соответствующей паре транспортных средств, имеющее преимущество перед вторым транспортным средством в соответствующей паре транспортных средств.
[0013] В некоторых вариантах осуществления способа он дополнительно включает в себя использование процессором предполагаемых траекторий транспортных средств на участке схемы дорог для определения целевой траектории одного из транспортных средств.
[0014] В некоторых вариантах осуществления способа использование предполагаемых траекторий включает в себя ввод процессором предполагаемых траекторий транспортных средств в алгоритм машинного обучения (MLA, Machine Learned Algorithm). Алгоритм MLA способен использовать по меньшей мере эти предполагаемые траектории транспортных средств для выдачи целевой траектории одного из транспортных средств.
[0015] В некоторых вариантах осуществления способа алгоритм MLA дополнительно способен использовать кинематические данные по меньшей мере одного из транспортных средств для выдачи целевой траектории одного из транспортных средств.
[0016] В некоторых вариантах осуществления способа кинематические данные содержат положение по меньшей мере одного из транспортных средств и/или скорость по меньшей мере одного из транспортных средств и/или ускорение по меньшей мере одного из транспортных средств.
[0017] В некоторых вариантах осуществления способа кинематические данные собираются системой датчиков, связанной с одним из транспортных средств.
[0018] В некоторых вариантах осуществления способа процессору дополнительно доступна информация, указывающая на положение транспортных средств на участке схемы дорог.
[0019] В некоторых вариантах осуществления способа информация, указывающая на положение, собирается системой датчиков, связанной с одним из транспортных средств.
[0020] В некоторых вариантах осуществления способа одно из транспортных средств оснащено системой датчиков.
[0021] В некоторых вариантах осуществления способа графовая структура является иерархической структурой, указывающей на основанную на приоритетах иерархию транспортных средств, где на верхнем уровне находится главное транспортное средство. Главное транспортное средство представляет собой транспортное средство, меньше зависящее от других транспортных средств в основанной на приоритетах иерархии, чем любое другое транспортное средство в основанной на приоритетах иерархии.
[0022] В некоторых вариантах осуществления способа определение информации о приоритете транспортных средств включает в себя формирование множества графовых структур. Множество графовых структур содержит множество иерархических структур, каждая из которых указывает на соответствующую основанную на приоритетах иерархию соответствующих транспортных средств. На верхнем уровне каждой иерархической структуры находится соответствующее главное транспортное средство. Главное транспортное средство представляет собой транспортное средство, меньше зависящее от других транспортных средств в соответствующей основанной на приоритетах иерархии, чем любое другое транспортное средство в соответствующей основанной на приоритетах иерархии.
[0023] В некоторых вариантах осуществления способа порядок оценивания траекторий для основанной на приоритетах иерархии начинается с соответствующего главного транспортного средства.
[0024] В некоторых вариантах осуществления способа для определения по меньшей мере одной предполагаемой траектории одного из транспортных средств способ дополнительно включает в себя формирование по меньшей мере одной из предполагаемых траекторий для транспортных средств, занимающих более высокую позицию в упомянутом порядке, чем это одно из транспортных средств, начиная с соответствующего главного транспортного средства и продолжая в соответствии с упомянутым порядком.
[0025] В некоторых вариантах осуществления способа он исключает определение по меньшей мере одной предполагаемой траектории для транспортных средств, занимающих более низкую позицию в упомянутом порядке, чем одно из транспортных средств.
[0026] В некоторых вариантах осуществления способа одно из транспортных средств и другое транспортное средство представляют собой автономные транспортные средства.
[0027] В некоторых вариантах осуществления способа он дополнительно включает в себя отправку другому транспортному средству информации, указывающей на порядок оценивания траекторий.
[0028] В некоторых вариантах осуществления способа одному из транспортных средств доступны кинематические данные по меньшей мере одного из транспортных средств, а способ дополнительно включает в себя отправку другому транспортному средству этих кинематических данных.
[0029] В некоторых вариантах осуществления способа одному из транспортных средств доступна относящаяся к объектам информация об объектах на участке схемы дорог, а способ дополнительно включает в себя отправку другому транспортному средству этой относящейся к объектам информации.
[0030] В некоторых вариантах осуществления способа он дополнительно включает в себя определение целевой траектории одного из транспортных средств и отправку другому транспортному средству информации, указывающей на эту целевую траекторию.
[0031] В соответствии со вторым аспектом настоящей технологии реализован процессор для определения порядка оценивания траекторий транспортных средств. Одно из транспортных средств имеет связь с процессором. Процессору доступна информация, указывающая на участок схемы дорог, соответствующий обстановке вокруг одного из транспортных средств, и на правила дорожного движения, связанные с этим участком схемы дорог. Процессор способен определять пары транспортных средств с пересекающимися потенциальными траекториями на этом участке схемы дорог. Процессор способен определять информацию о приоритете транспортных средств, указывающую на приоритеты транспортных средств на этом участке схемы дорог. Для определения информации о приоритете транспортных средств процессор способен использовать правила дорожного движения для определения транспортного средства в соответствующей паре транспортных средств, имеющего преимущество перед другим транспортным средством в соответствующей паре транспортных средств. Процессор на основе информации о приоритете транспортных средств способен определять порядок оценивания траекторий транспортных средств на участке схемы дорог так, чтобы транспортное средство, имеющее преимущество перед другим транспортным средством согласно информации о приоритете транспортных средств, занимало более высокую позицию в порядке оценивания траекторий, чем другое транспортное средство.
[0032] В некоторых вариантах осуществления процессора он выполнен на основе аппаратных средств.
[0033] В некоторых вариантах осуществления процессора он дополнительно способен использовать порядок оценивания траекторий для определения предполагаемых траекторий транспортных средств на участке схемы дорог так, чтобы (а) по меньшей мере одна предполагаемая траектория данного транспортного средства определялась до определения по меньшей мере одной предполагаемой траектории другого транспортного средства и (б) по меньшей мере одна предполагаемая траектория другого транспортного средства определялась с учетом по меньшей мере одной предполагаемой траектории данного транспортного средства.
[0034] В некоторых вариантах осуществления процессора его способность определять информацию о приоритете транспортных средств включает в себя способность формировать графовую структуру, содержащую вершины и ребра. Ребро соединяет пару вершин. Пара вершин указывает на соответствующую пару транспортных средств на участке схемы дорог. Ребро указывает на первое транспортное средство в соответствующей паре транспортных средств, имеющее преимущество перед вторым транспортным средством в соответствующей паре транспортных средств.
[0035] В некоторых вариантах осуществления процессора он дополнительно способен использовать предполагаемые траектории транспортных средств на участке схемы дорог для определения целевой траектории одного из транспортных средств.
[0036] В некоторых вариантах осуществления процессора его способность использовать предполагаемые траектории включает в себя способность вводить предполагаемые траектории транспортных средств в алгоритм MLA. Алгоритм MLA способен использовать по меньшей мере эти предполагаемые траектории транспортных средств для выдачи целевой траектории одного из транспортных средств.
[0037] В некоторых вариантах осуществления процессора алгоритм MLA дополнительно способен использовать кинематические данные по меньшей мере одного из транспортных средств для выдачи целевой траектории одного из транспортных средств.
[0038] В некоторых вариантах осуществления процессора кинематические данные содержат положение по меньшей мере одного из транспортных средств и/или скорость по меньшей мере одного из транспортных средств и/или ускорение по меньшей мере одного из транспортных средств.
[0039] В некоторых вариантах осуществления процессора кинематические данные собираются системой датчиков, связанной с одним из транспортных средств.
[0040] В некоторых вариантах осуществления процессора ему дополнительно доступна информация, указывающая на положение транспортных средств на участке схемы дорог.
[0041] В некоторых вариантах осуществления процессора информация, указывающая на положение, собирается системой датчиков, связанной с одним из транспортных средств.
[0042] В некоторых вариантах осуществления процессора одно из транспортных средств оснащено системой датчиков.
[0043] В некоторых вариантах осуществления процессора графовая структура является иерархической структурой, указывающей на основанную на приоритетах иерархию транспортных средств, где на верхнем уровне находится главное транспортное средство. Главное транспортное средство представляет собой транспортное средство, меньше зависящее от других транспортных средств в основанной на приоритетах иерархии, чем любое другое транспортное средство в основанной на приоритетах иерархии.
[0044] В некоторых вариантах осуществления процессора его способность определять информацию о приоритете транспортных средств включает в себя способность формировать множество графовых структур. Множество графовых структур содержит множество иерархических структур, каждая из которых указывает на соответствующую основанную на приоритетах иерархию соответствующих транспортных средств. На верхнем уровне каждой иерархической структуры находится соответствующее главное транспортное средство. Главное транспортное средство представляет собой транспортное средство, меньше зависящее от других транспортных средств в соответствующей основанной на приоритетах иерархии, чем любое другое транспортное средство в соответствующей основанной на приоритетах иерархии.
[0045] В некоторых вариантах осуществления процессора порядок оценивания траекторий для основанной на приоритетах иерархии начинается с соответствующего главного транспортного средства.
[0046] В некоторых вариантах осуществления процессора он способен определять по меньшей мере одну предполагаемую траекторию одного из транспортных средств. Процессор дополнительно способен формировать по меньшей мере одну предполагаемую траекторию для транспортных средств, занимающих более высокую позицию в упомянутом порядке, чем одно из транспортных средств, начиная с соответствующего главного транспортного средства и продолжая в соответствии с упомянутым порядком.
[0047] В некоторых вариантах осуществления процессора он дополнительно способен не определять по меньшей мере одну предполагаемую траекторию для транспортных средств, занимающих более низкую позицию в порядке, чем одно из транспортных средств.
[0048] В некоторых вариантах осуществления процессора одно из транспортных средств и другое транспортное средство представляют собой автономные транспортные средства.
[0049] В некоторых вариантах осуществления процессора он дополнительно способен отправлять другому транспортному средству информацию, указывающую на порядок оценивания траекторий.
[0050] В некоторых вариантах осуществления процессора одному из транспортных средств доступны кинематические данные по меньшей мере одного из транспортных средств, а процессор дополнительно способен отправлять другому транспортному средству эти кинематические данные.
[0051] В некоторых вариантах осуществления процессора одному из транспортных средств доступна относящаяся к объектам информация об объектах на участке схемы дорог, а процессор дополнительно способен отправлять другому транспортному средству эту относящуюся к объектам информацию.
[0052] В некоторых вариантах осуществления процессора он дополнительно способен определять целевую траекторию одного из транспортных средств и отправлять другому транспортному средству информацию, указывающую на эту целевую траекторию.
[0053] В контексте настоящего описания термин «сервер» означает компьютерную программу, выполняемую соответствующими аппаратными средствами и способную принимать запросы (например от клиентских устройств) через сеть и выполнять эти запросы или инициировать их выполнение. Аппаратные средства могут быть реализованы в виде одного физического компьютера или одной компьютерной системы, что не существенно для настоящей технологии. В настоящем контексте выражение «сервер» не означает, что каждая задача (например, принятая команда или запрос) или некоторая конкретная задача принимается, выполняется или запускается одним и тем же сервером (т.е. одними и теми же программными и/или аппаратными средствами). Это выражение означает, что любое количество программных средств или аппаратных средств может принимать, отправлять, выполнять или запускать выполнение любой задачи или запроса либо результатов любых задач или запросов. Все эти программные и аппаратные средства могут представлять собой один сервер или несколько серверов, причем оба эти случая подразумеваются в выражении «по меньшей мере один сервер».
[0054] В контексте настоящего описания термин «электронное устройство» означает любое компьютерное аппаратное средство, способное выполнять программы, подходящие для решения поставленной задачи. В контексте настоящего описания термин «электронное устройство» подразумевает, что устройство может функционировать в качестве сервера для других электронных устройств и клиентских устройств, тем не менее, это не обязательно для настоящей технологии. Таким образом, некоторые (не имеющие ограничительного характера) примеры электронных устройств включают в себя персональные компьютеры (настольные, ноутбуки, нетбуки и т.п.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Должно быть понятно, что в настоящем контексте тот факт, что устройство функционирует в качестве электронного устройства, не означает, что оно не может функционировать в качестве сервера для других электронных устройств. Использование выражения «электронное устройство» не исключает использования нескольких клиентских устройств для приема, отправки, выполнения или инициирования выполнения любой задачи или запроса либо результатов любых задач или запросов либо шагов любого описанного здесь способа.
[0055] В контексте настоящего описания термин «клиентское устройство» означает любое компьютерное аппаратное средство, способное выполнять программы, подходящие для решения поставленной задачи. В контексте настоящего описания термин «клиентское устройство» в общем случае связан с пользователем клиентского устройства. Таким образом, некоторые (не имеющие ограничительного характера) примеры клиентских устройств включают в себя персональные компьютеры (настольные, ноутбуки, нетбуки и т.п.), смартфоны и планшеты, а также сетевое оборудование, такое как маршрутизаторы, коммутаторы и шлюзы. Следует отметить, что в данном контексте устройство, функционирующее как клиентское устройство, также может функционировать как сервер для других клиентских устройств. Использование выражения «клиентское устройство» не исключает использования нескольких клиентских устройств для приема, отправки, выполнения или инициирования выполнения любой задачи или запроса либо результатов любых задач или запросов либо шагов любого описанного здесь способа.
[0056] В контексте настоящего описания выражение «информация» включает в себя информацию любого рода или вида, допускающую хранение в базе данных. Таким образом, информация включает в себя аудиовизуальные произведения (изображения, фильмы, звукозаписи, презентации и т.д.), данные (данные о местоположении, числовые данные и т.д.), текст (мнения, комментарии, вопросы, сообщения и т.д.), документы, электронные таблицы и т.д., но не ограничивается ими.
[0057] В контексте настоящего описания выражение «программный компонент» включает в себя обозначение программного обеспечения (подходящего для определенных аппаратных средств), необходимого и достаточного для выполнения определенной функции или нескольких функций.
[0058] В контексте настоящего описания выражение «носитель компьютерной информации» (также называется «носителем информации») означает носители любого рода и вида, включая ОЗУ, ПЗУ, диски (CD-ROM, DVD, гибкие диски, жесткие диски и т.д.), USB-накопители, твердотельные накопители, накопители на магнитных лентах и т.д. Для формирования носителя компьютерной информации может быть объединено множество элементов, включая два или более элементов носителя информации одного вида и/или два или более элементов носителя информации различных видов.
[0059] В контексте настоящего описания термин «база данных» означает любой структурированный набор данных, независимо от его конкретной структуры, программного обеспечения для управления базой данных или компьютерных аппаратных средств для хранения этих данных, их применения или обеспечения их использования иным способом. База данных может располагаться в тех же аппаратных средствах, где реализован процесс, обеспечивающий хранение или использование информации, хранящейся в базе данных, либо база данных может располагаться в отдельных аппаратных средствах, таких как специализированный сервер или множество серверов.
[0060] В контексте настоящего описания числительные «первый» «второй», «третий» и т.д. используются лишь для указания различия между существительными, к которым они относятся, а не для описания каких-либо определенных взаимосвязей между этими существительными. Например, должно быть понятно, что использование терминов «первый сервер» и «третий сервер» не подразумевает какого-либо определенного порядка, вида, хронологии, иерархии или классификации, в данном случае, серверов, а также что их использование (само по себе) не подразумевает наличие «второго сервера» в любой ситуации. Кроме того, как встречается в настоящем описании в другом контексте, ссылка на «первый» элемент и «второй» элемент не исключает того, что эти два элемента в действительности могут быть одним и тем же элементом. Таким образом, например, в некоторых случаях «первый» сервер и «второй» сервер могут представлять собой один элемент программных и/или аппаратных средств, а в других случаях - различные элементы программных и/или аппаратных средств.
[0061] Каждый вариант осуществления настоящей технологии относится к по меньшей мере одной из вышеупомянутых целей и/или аспектов, но не обязательно ко всем ним. Должно быть понятно, что некоторые аспекты настоящей технологии, связанные с попыткой достижения вышеупомянутой цели, могут не соответствовать этой цели и/или могут соответствовать другим целям, явным образом здесь не упомянутым.
[0062] Дополнительные и/или альтернативные признаки, аспекты и преимущества вариантов осуществления настоящей технологии содержатся в дальнейшем описании, в приложенных чертежах и в формуле изобретения.
Краткое описание чертежей
[0063] Эти и другие признаки, аспекты и преимущества настоящей технологии поясняются в дальнейшем описании, в приложенной формуле изобретения и на следующих чертежах.
[0064] На фиг. 1 представлена схема примера компьютерной системы для реализации некоторых вариантов осуществления систем и/или способов согласно настоящей технологии.
[0065] На фиг. 2 представлена сетевая компьютерная среда, пригодная для использования с некоторыми вариантами осуществления настоящей технологии.
[0066] На фиг. 3 приведен пример ситуации для определения информации о приоритете транспортных средств процессором компьютерной системы, представленной на фиг. 1.
[0067] На фиг. 4 представлена информация о приоритете транспортных средств в виде двух графов согласно по меньшей мере некоторым вариантам осуществления настоящей технологии.
[0068] На фиг. 5 представлен пример другой ситуации для описания по меньшей мере одного преимущества использования информации о приоритете транспортных средств в по меньшей мере некоторых вариантах осуществления настоящей технологии.
[0069] На фиг. 6 представлена блок-схема соответствующего не имеющим ограничительного характера вариантам осуществления настоящей технологии способа, выполняемого компьютерным устройством.
Осуществление изобретения
[0070] Представленные в данном описании примеры и условный язык предназначены для обеспечения лучшего понимания принципов настоящей технологии, а не для ограничения ее объема до таких специально приведенных примеров и условий. Очевидно, что специалисты в данной области техники способны разработать различные способы и устройства, которые явно не описаны и не показаны, но реализуют принципы настоящей технологии в пределах ее существа и объема.
[0074] Кроме того, чтобы способствовать лучшему пониманию, следующее описание может содержать упрощенные варианты реализации настоящей технологии. Специалистам в данной области должно быть понятно, что различные варианты осуществления настоящей технологии могут быть значительно сложнее.
[0072] В некоторых случаях приводятся полезные примеры модификаций настоящей технологии. Они способствуют пониманию, но также не определяют объем или границы настоящей технологии. Представленный перечень модификаций не является исчерпывающим и специалист в данной области может разработать другие модификации в пределах объема настоящей технологии. Кроме того, если в некоторых случаях модификации не описаны, это не означает, что они невозможны и/или что описание содержит единственно возможный вариант реализации того или иного элемента настоящей технологии.
[0073] Более того, описание принципов, аспектов и вариантов реализации настоящей технологии, а также их конкретные примеры, предназначены для охвата их структурных и функциональных эквивалентов, независимо от того, известны они в настоящее время или будут разработаны в будущем. Например, специалистам в данной области техники должно быть очевидно, что любые описанные структурные схемы соответствуют концептуальным представлениям иллюстративных принципиальных схем, реализующих принципы настоящей технологии. Также должно быть очевидно, что любые блок-схемы, схемы процессов, диаграммы изменения состояния, псевдокоды и т.п. соответствуют различным процессам, которые могут быть представлены на машиночитаемом физическом носителе информации и могут выполняться компьютером или процессором, независимо от того, показан такой компьютер или процессор явно или нет.
[0074] Функции различных элементов, показанных на иллюстрациях, включая любой функциональный блок, обозначенный как «процессор», могут быть реализованы с использованием специализированных аппаратных средств, а также аппаратных средств, способных выполнять соответствующее программное обеспечение. Если используется процессор, эти функции могут выполняться одним выделенным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут использоваться совместно. Кроме того, явное использование термина «процессор» или «контроллер» не должно трактоваться как указание исключительно на аппаратные средства, способные выполнять программное обеспечение, и может подразумевать, помимо прочего, аппаратные средства цифрового сигнального процессора (DSP), сетевой процессор, специализированную интегральную схему (ASIC), программируемую вентильную матрицу (FPGA), ПЗУ для хранения программного обеспечения, ОЗУ и энергонезависимое ЗУ. Также могут подразумеваться другие аппаратные средства, общего назначения и/или заказные.
[0075] Программные модули или просто модули, реализация которых предполагается в виде программных средств, могут быть представлены здесь как любое сочетание элементов блок-схемы или других элементов, указывающих на выполнение шагов процесса и/или содержащих текстовое описание. Такие модули могут выполняться аппаратными средствами, показанными явно или подразумеваемыми.
[0076] С учетом вышеизложенных принципов далее рассмотрены некоторые не имеющие ограничительного характера примеры, иллюстрирующие различные варианты реализации аспектов настоящей технологии.
Компьютерная система
[0077] На фиг. 1 представлена компьютерная система 100, пригодная для использования с некоторыми вариантами осуществления настоящей технологии и содержащая различные элементы аппаратных средств, включая один или несколько одно- или многоядерных процессоров, коллективно представленных процессором 110, твердотельный накопитель 120, память 130, которая может представлять собой ОЗУ или память любого другого вида.
[0078] Связь между различными элементами компьютерной системы 100 может осуществляться через одну или несколько внутренних и/или внешних шин (не показаны), таких как шина PCI, шина USB, шина FireWire стандарта IEEE 1394, шина SCSI, шина Serial-ATA и т.д., с которыми различные аппаратные элементы соединены электронным образом. Согласно вариантам осуществления настоящей технологии, твердотельный накопитель 120 хранит программные команды, пригодные для загрузки в память 130 и исполнения процессором 110 с целью решения поставленных задач. Например, программные команды могут входить в состав управляющего приложения транспортного средства, выполняемого процессором 110. Следует отметить, что компьютерная система 100 может содержать дополнительные и/или не обязательные элементы (не показаны), такие как модули передачи данных по сети, модули определения местоположения и т.д.
Сетевая компьютерная среда
[0079] На фиг. 2 представлена сетевая компьютерная среда 200, пригодная для использования с некоторыми вариантами осуществления систем и/или способов согласно настоящей технологии. Сетевая компьютерная среда 200 содержит электронное устройство 210, связанное с транспортным средством 220 и/или с пользователем (не показан), который может управлять транспортным средством 220, сервер 235, связанный с электронным устройством 210 через сеть 240 связи (например, через сеть Интернет и т.п., как более подробно описано ниже).
[0080] Сетевая компьютерная среда 200 также может содержать один или несколько спутников (не показаны), передающих сигнал GPS электронному устройству 210 и/или принимающих этот сигнал от него. Должно быть понятно, что настоящая технология не ограничивается системой GPS и что она может использовать технологию определения местоположения, отличную от системы GPS. Следует отметить, что один или несколько спутников могут отсутствовать по меньшей мере в некоторых вариантах осуществления настоящей технологии.
[0081] Транспортное средство 220, с которым связано электронное устройство 210, может представлять собой любое транспортное средство для отдыха или перевозок, такое как автомобиль для индивидуального или коммерческого использования, грузовой автомобиль, мотоцикл и т.д. Несмотря на то, что транспортное средство 220 изображено в виде наземного транспортного средства, это не обязательно для всех вариантов осуществления настоящей технологии. Например, транспортное средство 220 может представлять собой водное судно, такое как лодка, или воздушное судно, такое как беспилотный летательный аппарат.
[0082] Транспортное средство 220 может представлять собой управляемое пользователем транспортное средство, самоуправляемое транспортное средство или любое другое транспортное средство с компьютеризированным управлением. Следует отметить, что при этом не накладывается каких-либо ограничений на конкретные параметры транспортного средства 200, такие как производитель транспортного средства, модель транспортного средства, год выпуска транспортного средства, масса транспортного средства, размеры транспортного средства, распределение массы транспортного средства, площадь поверхности транспортного средства, высота транспортного средства, вид трансмиссии (например, привод на два или на четыре колеса), вид шин, тормозная система, топливная система, пробег, идентификационный номер транспортного средства, рабочий объем двигателя и т.д.
[0083] На реализацию электронного устройства 210 не накладывается каких-либо ограничений. Например, электронное устройство 210 может быть реализовано в виде блока управления двигателем транспортного средства, центрального процессора транспортного средства, навигационного устройства транспортного средства (например, TomTom™, Garmin™), планшета, персонального компьютера, встроенного в транспортное средство 220, и т.д. Следует отметить, что электронное устройство 210 может быть постоянно связано или не связано с транспортным средством 220. Дополнительно или в качестве альтернативы, электронное устройство 210 может быть реализовано в устройстве беспроводной связи, таком как мобильный телефон (например, смартфон или радиотелефон). В некоторых вариантах осуществления изобретения электронное устройство 210 содержит дисплей 270.
[0084] Электронное устройство 210 может содержать некоторые или все элементы компьютерной системы 100, представленной на фиг. 1. В некоторых вариантах осуществления изобретения электронное устройство 210 представляет собой бортовой компьютер и содержит процессор 110, твердотельный накопитель 120 и память 130. Иными словами, электронное устройство 210 содержит аппаратные средства и/или прикладное программное обеспечение и/или встроенное программное обеспечение либо их сочетание для обработки данных, как более подробно описано ниже.
Сеть связи
[0085] В некоторых вариантах осуществления настоящей технологии сеть 240 связи представляет собой сеть Интернет. В альтернативных не имеющих ограничительного характера вариантах осуществления изобретения сеть связи может быть реализована в виде любой подходящей локальной сети (LAN, Local Area Network), глобальной сети (WAN, Wide Area Network), частной сети связи и т.п. Должно быть очевидно, что варианты осуществления сети связи приведены лишь в иллюстративных целях. Реализация линии связи (отдельно не обозначена) между электронным устройством 210 и сетью 240 связи зависит, среди прочего, от реализации электронного устройства 210. В качестве примера, не имеющего ограничительного характера, в тех вариантах осуществления настоящей технологии, где электронное устройство 210 реализовано в виде устройства беспроводной связи, такого как смартфон или навигационное устройство, эта линия связи может быть реализована в виде беспроводной линии связи. Примеры беспроводных линий связи включают в себя канал сети связи 3G, канал сети связи 4G и т.п. В сети 240 связи также может использоваться беспроводное соединение с сервером 235.
Сервер
[0086] В некоторых вариантах осуществления настоящей технологии сервер 235 реализован в виде традиционного компьютерного сервера и может содержать некоторые или все элементы компьютерной системы 100, представленной на фиг. 1. В одном не имеющем ограничительного характера примере сервер 235 реализован в виде сервера Dell™ PowerEdge™, работающего под управлением операционной системы Microsoft™ Windows Server™, но он также может быть реализован с использованием любых других подходящих аппаратных средств, прикладного программного обеспечения и/или встроенного программного обеспечения либо их сочетания. В представленных не имеющих ограничительного характера вариантах осуществления настоящей технологии сервер 235 представляет собой один сервер. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии (не показаны) функции сервера 235 могут быть распределены между несколькими серверами.
[0087] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор 110 устройства 210 может быть связан с сервером 235 для получения одного или нескольких обновлений. Обновления могут представлять собой обновления программного обеспечения, обновления карт, обновления маршрутов, обновления погодных данных и т.д. В некоторых вариантах осуществления настоящей технологии процессор 110 также может быть способным отправлять серверу 235 некоторые рабочие данные, такие как пройденные маршруты, данные о дорожном движении, рабочие характеристики и т.д. Некоторые или все данные, передаваемые между транспортным средством 220 и сервером 235, могут быть зашифрованы и/или обезличены.
[0088] В некоторых вариантах осуществления настоящей технологии серверу 235 может быть доступна (локально и/или удаленно) информация, указывающая на схему дорог. В общем случае, схема дорог представляет собой схему дорог в городе, в области и/или в других регионах. Например, участок схемы дорог может содержать следующую информацию: наличие дорог на этом участке, количество полос движения на этих дорогах, наличие перекрестков и т.д., но не ограничиваясь этим.
[0089] В других вариантах осуществления настоящей технологии серверу 235 может быть доступна (локально и/или удаленно) информация, указывающая на правила дорожного движения, связанные со схемой дорог. В общем случае, правила дорожного движения представляют собой правила движения, определенные уполномоченным органом и применимые по меньшей мере на некоторых частях схемы дорог. Например, правила дорожного движения, связанные с участком схемы дорог, представляют собой правила движения, применимые на этом участке схемы дорог, в частности, заданное направление движения транспорта для каждой полосы движения на участке схемы дорог, наличие конкретных дорожных знаков, регулирующих движение на этом участке схемы дорог, включая знаки необходимости остановки, знаки «уступи дорогу», указатели полос движения, знаки ограничения скорости, указания на правила дорожного движения других видов и т.д.
[0090] Предполагается, что сервер 235 может быть способным предоставлять процессору 110 (например, процессору 110 электронного устройства 210) доступ к информации, указывающей (а) на участок схемы дорог, соответствующий обстановке вокруг транспортного средства 220, и (б) на правила дорожного движения, связанные с этим участком схемы дорог.
[0091] С этой целью в некоторых вариантах осуществления изобретения сервер 235 может принимать отправленный электронным устройством 210 запрос на предоставление доступа к информации, указывающей на участок схемы дорог (соответствующий обстановке вокруг транспортного средства 220) и на соответствующие правила дорожного движения. Например, запрос, отправленный электронным устройством 210, может содержать информацию, указывающую на положение (возможно, в глобальных координатах) транспортного средства 220. В результате сервер 235 может предоставлять электронному устройству 210 доступ к информации (или предоставлять саму информацию), указывающей на участок схемы дорог, где находится транспортное средство 220, и на соответствующие правила дорожного движения.
[0092] Ниже более подробно описано, для какой цели сервер 235 может быть способным предоставлять электронному устройству 210 доступ к информации, указывающей на участок схемы дорог, соответствующий обстановке вокруг транспортного средства 220, и на правила дорожного движения, связанные с этим участком схемы дорог.
[0093] Тем не менее, электронное устройство 210 может быть способным получать доступ к информации (или получать саму информацию), указывающей на участок схемы дорог, соответствующий обстановке вокруг транспортного средства 220, и на соответствующие правила дорожного движения не через сервер 235, а иным образом. Например, информация, указывающая на схему дорог и на правила дорожного движения, может быть заранее загружена и заранее сохранена электронным устройством 210 без выхода за границы настоящей технологии.
Система датчиков
[0094] В соответствии с по меньшей мере некоторыми вариантами осуществления настоящей технологии электронное устройство 210 связано с системой 230 датчиков. В общем случае, система 230 датчиков способна фиксировать данные или сигналы, относящиеся к обстановке вокруг транспортного средства 220. Система 230 датчиков связана с электронным устройством 210, в частности, для обработки электронным устройством 210 зафиксированной таким образом информации (данных или сигналов). Как более подробно описано ниже, процессор 110 может быть способным обрабатывать зафиксированную таким образом информацию об обстановке вокруг транспортного средства 220 для принятия решения и/или для управления транспортным средством 220.
[0095] На местоположение системы датчиков относительно транспортного средства 220 не накладывается каких-либо особых ограничений. Например, система 230 датчиков может быть установлена с внутренней стороны в верхней части ветрового стекла транспортного средства 220. В пределах объема настоящего изобретения также возможны и другие места, включая заднее окно, боковые окна, передний капот, крышу, переднюю решетку радиатора или передний бампер транспортного средства 220. В некоторых случаях система 230 датчиков может быть расположена в специальном кожухе (не показан), установленном сверху транспортного средства 220. Тем не менее, также предполагается, что различные элементы и/или подсистемы системы датчиков 230 могут быть установлены на транспортном средстве 220 в различных местах без выхода за границы настоящей технологии.
[0096] В других вариантах осуществления настоящей технологии система 230 датчиков может быть откалибрована. Эта калибровка может выполняться во время изготовления и/или настройки транспортного средства 220 или в любой удобный последующий момент времени. Иными словами, калибровка может выполняться при модернизации транспортного средства 220 с использованием системы датчиков 230. В качестве альтернативы, калибровка может выполняться во время оснащения транспортного средства 220 системой 230 датчиков.
[0097] В некоторых вариантах осуществления изобретения система 230 датчиков может быть способной собирать разнообразную информацию (данные или сигналы) об обстановке вокруг транспортного средства 220 и для этого может содержать множество элементов и/или множество подсистем, способных фиксировать эту разнообразную информацию.
[0098] В некоторых вариантах осуществления изобретения система 230 датчиков может содержать камеру. На реализацию камеры не накладывается каких-либо особых ограничений. Например, в некоторых вариантах осуществления настоящей технологии камера может быть реализована в виде черно-белой камеры с разрешением, достаточным для обнаружения объектов (например, соседних транспортных средств и/или дорожных знаков) на заданном расстоянии приблизительно до 50 м (тем не менее, без выхода за границы настоящего изобретения могут использоваться камеры с другим разрешением и дальностью действия). Также предполагается, что система 230 датчиков может содержать множество камер. Например, множество камер может содержать достаточное количество камер, чтобы фиксировать панорамное изображение обстановки вокруг транспортного средства 220.
[0099] В некоторых вариантах осуществления настоящей технологии камера (одна или несколько камер системы датчиков 230) может быть способной фиксировать заранее заданную часть обстановки вокруг транспортного средства 220. Например, одна или несколько камер могут быть способными фиксировать цифровое изображение (или последовательность цифровых изображений) в приблизительно 90-градусном секторе вокруг транспортного средства 220 вдоль траектории движения транспортного средства 220. В другом примере одна или несколько камер могут быть способными фиксировать цифровое изображение (или изображения) в приблизительно 360-градусном секторе вокруг транспортного средства 220 вдоль траектории движения транспортного средства 220 без выхода за границы настоящей технологии. В некотором не имеющем ограничительного характера примере одна или несколько камер системы датчиков 230 могут представлять собой камеры, поставляемые компанией FLIR Integrated Imaging Solutions Inc., 12051 Riverside Way, Richmond, BC, V6W 1K7, Canada (Канада). Должно быть очевидно, что система 230 датчиков может быть реализована в виде любого другого подходящего оборудования.
[00100] В других вариантах осуществления изобретения система 230 датчиков может содержать другие элементы и/или подсистемы, связанные с электронным устройством 210. Например, система 230 датчиков может содержать блок инерциальных измерений (IMU, Inertial Measurement Unit), лидарную систему (LIDAR LIght Detection And Ranging), радиолокационную систему, систему ультразвуковой эхолокации, иные основанные на изображении подсистемы датчиков и подсистемы других видов, способные фиксировать информацию (данные или сигналы) об обстановке вокруг транспортного средства 220.
[00101] Как описано выше, система 230 датчиков может быть способной фиксировать разнообразную информацию об обстановке вокруг транспортного средства 220. Например, по меньшей мере некоторая зафиксированная системой 230 датчиков информация об обстановке вокруг транспортного средства 220 может содержать относящуюся к объектам информацию, такую как информация о соседних транспортных средствах и/или о дорожных знаках вблизи транспортного средства 220. Кроме того, информация об обстановке вокруг транспортного средства 220 может содержать данные о положении других видов, которые могут быть (а) зафиксированы системой 230 датчиков и (б) отправлены процессору 110.
[00102] Например, система 230 датчиков может быть способной фиксировать данные, после обработки позволяющие электронному устройству 210 определять наличие, положение и/или ориентацию объектов, таких как транспортное средство 220, соседние транспортные средства и/или дорожные знаки. В другом примере система 230 датчиков может быть способной фиксировать данные, после обработки позволяющие электронному устройству 210 определять кинематические данные, связанные с различными объектами, расположенными вблизи транспортного средства 220, например, расположение объектов, скорость объектов, ускорение объектов и т.д.
[00103] Также предполагается, что система 230 датчиков может быть способной фиксировать данные, после обработки позволяющие транспортному средству 220 определять, среди прочего: (а) положение транспортного средства 220 (потенциально в глобальных координатах) на основе сигналов (например, сигналов GPS) от множества спутников, (б) расстояние от транспортного средства 220 до объектов вокруг транспортного средства 220 для определения положения и ориентации транспортного средства 220 и объектов вокруг транспортного средства 220 и (в) любые другие данные, которые могут быть использованы для определения текущего состояния транспортного средства 220 и/или текущего состояния обстановки вокруг транспортного средства 220, включая наличие, положение и ориентацию соседних транспортных средств относительно транспортного средства 220 и/или другого ориентира вблизи транспортного средства 220 (например, перекрестка).
[00104] Система 230 датчиков и/или процессор 110 также могут быть связаны с одной или несколькими системами транспортного средства 220. Например, система 230 датчиков может быть связана с тормозной системой транспортного средства, с силовой установкой транспортного средства, с системой рулевого управления транспортного средства и т.д. В некоторых вариантах осуществления настоящей технологии система 230 датчиков и/или процессор 110 могут получать информацию, указывающую на рабочие характеристики одной или нескольких систем транспортного средства 220.
Процессор
[00105] Как описано выше, процессор 110 (например, процессор 110 электронного устройства 210) для принятия решения и/или для управления транспортным средством 220 способен, среди прочего, обрабатывать (а) информацию, предоставленную ему системой 230 датчиков, (б) информацию, указывающую на участок схемы дорог, соответствующий обстановке вокруг транспортного средства 220, и (в) информацию, указывающую на правила дорожного движения, связанные с этим участком схемы дорог.
[00106] В некоторых вариантах осуществления настоящей технологии процессор 110 может быть способным определять информацию о приоритете транспортных средств для участка схемы дорог. Иными словами, в текущий момент времени процессор 110 может быть способным определять информацию, указывающую на приоритет транспортных средств на участке схемы дорог.
[00107] Также предполагается, что процессор 110 может быть способным использовать информацию о приоритете транспортных средств для определения порядка оценивания траекторий транспортных средств на участке схемы дорог. Иными словами, на основе информации о приоритете транспортных средств процессор 110 может быть способным определять порядок, в котором должны оцениваться траектории транспортных средств на участке схемы дорог.
[00108] Следует отметить, что разработчики настоящей технологии установили, что определение информации о приоритете транспортных средств и определение порядка оценивания траекторий согласно по меньшей мере некоторым вариантам осуществления настоящей технологии может обеспечить по меньшей мере некоторые технические преимущества по сравнению с известными решениями. По меньшей мере одно из преимуществ описано далее со ссылкой на фиг. 5.
[00109] Сначала описано (а) как определяется приоритет транспортных средств на участке схемы дорог (например транспортного средства 220 и соседних транспортных средств), (б) в каком виде информация о приоритете транспортных средств может быть определена или сформирована процессором 110 и (в) как информация о приоритете транспортных средств затем используется для определения порядка оценивания траекторий транспортных средств на участке схемы дорог.
[00110] На фиг. 3 представлен пример дорожной ситуации, используемой для описания по меньшей мере некоторых функций процессора 110.
[00111] На фиг. 3 приведено графическое представление 300 участка схемы дорог, соответствующего обстановке вокруг транспортного средства 220. Следует отметить, что графическое представление 300 приведено исключительно для иллюстрации ситуации и, следовательно, от процессора 110 не требуется фактическое отображение графического представления 300.
[00112] На графическом представлении 300 показан участок схемы дорог, содержащий (а) главную дорогу (на фиг. 3 проходит слева направо) с четырьмя главными полосами движения и (б) две второстепенных дороги (одна в верхней части фиг. 3, другая в нижней части фиг. 3), каждая из которых содержит одну второстепенную полосу движения.
[00113] На фиг. 3 также приведены графические представления 310, 320 и 330 по меньшей мере некоторых правил дорожного движения, связанных с участком схемы дорог. Следует отметить, что графические представления 310, 320 и 330 приведены исключительно для иллюстрации примера ситуации и, следовательно, от процессора 110 не требуется фактическое отображение графических представлений 310, 320 и 330.
[00114] Графические представления 310 указывают на заранее заданные направления движения для соответствующих полос движения, которые должны соблюдать движущиеся по этим полосам движения транспортные средства. Графические представления 320 указывают на правило дорожного движения (например, указание на необходимость остановки), которое должны соблюдать транспортные средства. Графические представления 330 указывают на другое правило дорожного движения (например, запрет на перестроение в другой ряд), которое должны соблюдать транспортные средства.
[00115] На фиг. 3 также приведены графические представления 350, 302, 304, 306 и 308 транспортных средств на участке схемы дорог. Следует отметить, что графические представления 350, 302, 304, 306 и 308 приведены исключительно для иллюстрации примера ситуации и, следовательно, от процессора 110 не требуется фактическое отображение графических представлений 350, 302, 304, 306 и 308.
[00116] Можно предположить, что положение и ориентация графического представления 350 на графическом представлении 300 участка схемы дорог соответствуют положению и ориентации транспортного средства 220, а положение и ориентация графических представлений 302, 304, 306 и 308 на графическом представлении 300 участка схемы дорог соответствуют положению и ориентаций соседних транспортных средств вокруг транспортного средства 220. Как описано выше, положение и ориентация транспортного средства 220 и соседних транспортных средств могут быть определены на основе информации, зафиксированной системой 230 датчиков транспортного средства 220 (см. фиг. 2).
[00117] Для иллюстрации данной ситуации можно предположить, что (а) графическое представление 350 связано с транспортным средством 220, находящимся на одной из второстепенных дорог и приближающимся к главной дороге, (б) графическое представление 302 связано с соседним транспортным средством A, движущимся по главной дороге, (в) графическое представление 304 связано с соседним транспортным средством B, следующим за соседним транспортным средством A по главной дороге, (г) графическое представление 306 связано с соседним транспортным средством C, движущимся по главной дороге в направлении, противоположном направлению соседних транспортных средств A и B, (д) графическое представление 308 связано с соседним транспортным средством D, движущимся впереди соседнего транспортного средства C.
[00118] В некоторых вариантах осуществления настоящей технологии процессор 110 может быть способным определять на участке схемы дорог пары транспортных средств, имеющих пересекающиеся потенциальные траектории.
[00119] Для определения потенциальных траекторий соответствующих транспортных средств процессор 110 может быть способным использовать (а) информацию, указывающую на положение и ориентацию соответствующих транспортных средств, и (б) информацию о правилах дорожного движения. Затем процессор 110 может быть способным определять, какие из этих потенциальных траекторий пересекаются, таким образом определяя пары транспортных средств на участке схемы дорог, имеющие пересекающиеся потенциальные траектории. В представленном на фиг. 3 примере ситуации процессор 110 может быть способным определить следующие пары транспортных средств:
(а) пара, состоящая из соседних транспортных средств A и B;
(б) пара, состоящая из соседнего транспортного средства A и транспортного средства 220;
(в) пара, состоящая из соседнего транспортного средства B и транспортного средства 220; и
(г) пара, состоящая из соседних транспортных средств C и D.
[00120] Следует отметить, что в представленной на фиг. 3 ситуации процессор 110 может, например, быть способным не определять пару, состоящую из соседних транспортных средств A и D, поскольку они не имеют пересекающихся потенциальных траекторий. Таким образом, можно сказать, что определенные процессором 110 пары транспортных средств (имеющие пересекающиеся потенциальные траектории) могут включать или не включать в себя все возможные пары транспортных средств на участке схемы дорог, т.е. определенные процессором 110 пары транспортных средств зависят, среди прочего, от ситуации, в которой находится транспортное средство 220.
[00121] Затем процессор 110 способен обрабатывать каждую определенную пару транспортных средств (индивидуально), чтобы определять транспортное средство в соответствующей паре транспортных средств, имеющее преимущество перед другим транспортным средством в соответствующей паре транспортных средств. Например, с этой целью процессор 110 может быть способным использовать (а) правила дорожного движения и (б) положение и ориентацию транспортных средств из соответствующих пар. Это означает, что процессор 110 может быть способным обрабатывать вышеупомянутые пары транспортных средств для определения информации о приоритете транспортных средств, указывающей на приоритет транспортных средств на участке схемы дорог. Например, путем обработки вышеупомянутых пар транспортных средств процессор 110 может определить (например, на основе правил дорожного движения), что:
(а) в паре, состоящей из соседних транспортных средств A и B, соседнее транспортное средство A имеет преимущество перед соседним транспортным средством B;
(б) в паре, состоящей из соседнего транспортного средства A и транспортного средства 220, соседнее транспортное средство A имеет преимущество перед транспортным средством 220;
(в) в паре, состоящей из соседнего транспортного средства B и транспортного средства 220, соседнее транспортное средство B имеет преимущество перед транспортным средством 220; и
(г) в паре, состоящей из соседних транспортных средств С и D, соседнее транспортное средство D имеет преимущество перед соседним транспортным средством C.
[00122] Приведенный выше список результатов определения, сформированных процессором 110, может содержать информацию о приоритете транспортных средств на участке схемы дорог. Процессор 110 может быть способным определять эту информацию о приоритете транспортных средств в различных форматах. Согласно по меньшей мере некоторым вариантам осуществления настоящей технологии, процессор 110 может быть способным определять информацию о приоритете транспортных средств в виде одной или нескольких графовых структур.
[00123] На фиг. 4 представлены две графовых структуры, которые процессор 110 может сформировать после определения того, какое транспортное средство в соответствующей паре транспортных средств имеет преимущество перед другим транспортным средством в соответствующей паре транспортных средств. Иными словами, на фиг. 4 в виде графа приведено представление 400 информации о приоритете транспортных средств, которую способен определять процессор 110.
[00124] Как описано выше, графовое представление 400 информации о приоритете транспортных средств для приведенного примера ситуации содержит две графовых структуры: первую графовую структуру 402 и вторую графовую структуру 404. Первая графовая структура 402 содержит три вершины: (а) первую вершину 410, (б) вторую вершину 412 и (в) третью вершину 414. Вторая графовая структура 404 содержит две вершины: (а) четвертую вершину 420 и (б) пятую вершину 422.
[00125] Следует отметить, что каждая вершина графовой структуры связана с соответствующим транспортным средством на участке схемы дорог, который соответствует обстановке вокруг транспортного средства 220. Например, (а) первая вершина 410 связана с соседним транспортным средством A, (б) вторая вершина 412 связана с соседним транспортным средством B, (в) третья вершина 414 связана с транспортным средством 220, (г) четвертая вершина 420 связана с соседним транспортным средством D и (д) пятая вершина 422 связана с соседним транспортным средством C.
[00126] Предполагается, что одна или несколько графовых структур, сформированных процессором 110 (которые указывают на информацию о приоритете транспортных средств), могут содержать вершины в количестве, равном количеству транспортных средств на участке схемы дорог.
[00127] Помимо соответствующих вершин, первая графовая структура 402 и вторая графовая структура 404 содержат ребра. Например, первая графовая структура 402 содержит (а) первое ребро 411 и (б) второе ребро 413, а вторая графовая структура 404 содержит третье ребро 421.
[00128] Ребро соединяет пару соответствующих вершин, т.е. (а) первое ребро 411 соединяет первую вершину 410 и вторую вершину 412, (б) второе ребро 413 соединяет вторую вершину 412 и третью вершину 414 и (в) третье ребро 421 соединяет четвертую вершину 420 и пятую вершину 422.
[00129] С учетом того, что каждая вершина обозначает соответствующее транспортное средство на участке схемы дорог, пара вершин, соединенных соответствующим ребром, указывает на соответствующую определенную пару транспортных средств на участке схемы дорог (имеющих пересекающиеся потенциальные траектории). Следовательно, также можно сказать, что соответствующее ребро между определенной парой транспортных средств указывает на транспортное средство в соответствующей паре транспортных средств, имеющее преимущество перед другим транспортным средством в соответствующей паре транспортных средств.
[00130] Для лучшей иллюстрации можно рассмотреть в качестве примера пару вершин, содержащую первую вершину 410 и вторую вершину 412. Эта пара вершин соединена первым ребром 411. С учетом того, что первая вершина 410 связана с соседним транспортным средством A, а вторая вершина 412 связана с соседним транспортным средством B, первое ребро 411 содержит информацию, указывающую на то, что соседнее транспортное средство A имеет преимущество перед соседним транспортным средством B (в этом примере ситуации).
[0013] В качестве другого примера можно рассмотреть другую пару вершин, содержащую вторую вершину 412 и третью вершину 414. Эта другая пара вершин соединена вторым ребром 413. С учетом того, что вторая вершина 412 связана с соседним транспортным средством B, а третья вершина 414 связана с транспортным средством 220, второе ребро 413 содержит информацию, указывающую на то, что соседнее транспортное средство B имеет преимущество перед транспортным средством 220 (в этом примере ситуации).
[00132] При этом следует также отметить, что первая графовая структура 402 содержит дополнительную информацию о том, что соседнее транспортное средство A (связанное с первой вершиной 410) имеет преимущество перед транспортным средством 220 (связанным с третьей вершиной 414). Предполагается, что в некоторых вариантах осуществления настоящей технологии процессор 110 может быть способным сформировать первую графовую структуру 402, содержащую вспомогательное ребро 430, указывающее на эту дополнительную информацию.
[00133] В целом, можно сказать, что информация о приоритете транспортных средств, определенная процессором 110, может быть обеспечена за счет того, что процессор 110 способен формировать одну или несколько графовых структур, например, первую графовую структуру 402 и вторую графовую структуру 404, которые представляют информацию о приоритете транспортных средств на участке схемы дорог.
[00134] Кроме того, первая графовая структура 402 и вторая графовая структура 404 представляют собой иерархические структуры, т.е. графовая структура, сформированная процессором 110, указывает на основанную на приоритетах иерархию транспортных средств, связанных с соответствующими вершинами графовой структуры (см. фиг. 4). Это означает, что в представленной на фиг. 3 ситуации процессор 110 может быть способным сформировать две графовые структуры и, следовательно, две основанных на приоритетах иерархии транспортных средств.
[00135] Например, в случае первой графовой структуры 402 соседнее транспортное средство A находится на верхнем уровне основанной на приоритетах иерархии, содержащей (а) соседнее транспортное средство A, (б) соседнее транспортное средство B и (в) транспортное средство 220.
[00136] В контексте данного описания транспортное средство, находящееся на верхнем уровне основанной на приоритетах иерархии, называется главным транспортным средством. Например, в первой графовой структуре 402, которая описывает первую основанную на приоритетах иерархию, содержащую (а) соседнее транспортное средство A, (б) соседнее транспортное средство B и (в) транспортное средство 220, главное транспортное средство представляет собой соседнее транспортное средство A. В другом примере во второй графовой структуре 404, которая описывает вторую основанную на приоритетах иерархию, содержащую (а) соседнее транспортное средство C и (б) соседнее транспортное средство D, главное транспортное средство представляет собой соседнее транспортное средство D.
[00137] Следует отметить, что главное транспортное средство в основанной на приоритетах иерархии транспортных средств представляет собой транспортное средство, имеющее преимущество перед всеми другими транспортными средствами в этой основанной на приоритетах иерархии. Иными словами, это означает, что главное транспортное средство может выбрать любую потенциальную траекторию, имея при этом право проезжать перед любым другим транспортным средством в основанной на приоритетах иерархии.
[00138] В некоторых вариантах осуществления настоящей технологии можно сказать, что главное транспортное средство в основанной на приоритетах иерархии представляет собой транспортное средство, меньше зависящее от других транспортных средств в основанной на приоритетах иерархии, чем любое другое транспортное средство в этой основанной на приоритетах иерархии.
[00139] Следует также отметить, что приоритеты транспортных средств, связанных с вершинами первой графовой структуры 402 (и, следовательно, транспортных средств из первой основанной на приоритетах иерархии), не зависят от приоритетов транспортных средств, связанных с вершинами второй графовой структуры 404 (и, следовательно, транспортных средств из второй основанной на приоритетах иерархии). Иными словами, это означает, что любая потенциальная траектория любого транспортного средства из первой основанной на приоритетах иерархии не зависит от какой-либо потенциальной траектории любого другого транспортного средства из второй основанной на приоритетах иерархии.
[00140] Как описано выше, после определения процессором 110 информации о приоритете транспортных средств (например, в виде первой графовой структуры 402 и второй графовой структуры 404) процессор 110 может быть способным использовать эту информацию о приоритете транспортных средств для определения порядка оценивания траекторий транспортных средств на участке схемы дорог.
[00141] Предполагается, что процессор 110 может быть способным определять порядок оценивания траекторий так, чтобы он был согласован с основанной на приоритетах иерархией транспортных средств из графовой структуры.
[00142] Для лучшей иллюстрации в качестве примера можно рассмотреть первую графовую структуру 402. Как описано выше, в первой основанной на приоритетах иерархии транспортных средств из первой графовой структуры 402 (а) соседнее транспортное средство A имеет преимущество перед всеми остальными транспортными средствами в первой графовой структуре (т.е. соседнее транспортное средство A представляет собой главное транспортное средство), (б) соседнее транспортное средство B представляет собой второе транспортное средство в первой основанной на приоритетах иерархии (т.е. не имеет преимущества перед главным транспортным средством) и (в) транспортное средство 220 представляет собой третье транспортное средство в первой основанной на приоритетах иерархии (т.е. не имеет преимущества перед главным транспортным средством и вторым транспортным средством из первой основанной на приоритетах иерархии). Таким образом, процессор 110 может быть способным определять следующий порядок оценивания траекторий для соседнего транспортного средства A, соседнего транспортного средства B и транспортного средства 220:
(а) по меньшей мере одна предполагаемая траектория соседнего транспортного средства A должна быть определена первой;
(б) по меньшей мере одна предполагаемая траектория соседнего транспортного средства B должна быть определена после по меньшей мере одной предполагаемой траектории соседнего транспортного средства A;
(в) по меньшей мере одна предполагаемая траектория транспортного средства 220 должна быть определена после по меньшей мере одной предполагаемой траектории соседнего транспортного средства A и после по меньшей мере одной предполагаемой траектории соседнего транспортного средства B.
[00143] Причина такого порядка определения траекторий заключается в том, что, например, для определения по меньшей мере одной предполагаемой траектории соседнего транспортного средства B сначала следует определить по меньшей мере одну предполагаемую траекторию соседнего транспортного средства A, поскольку от нее может зависеть по меньшей мере одна предполагаемая траектория соседнего транспортного средства B, т.к. соседнее транспортное средство A имеет преимущество перед соседним транспортным средством B.
[00144] Кроме того, например, до определения по меньшей мере одной предполагаемой траектории транспортного средства 220 сначала следует определить по меньшей мере одну предполагаемую траекторию соседнего транспортного средства B, поскольку от нее может зависеть по меньшей мере одна предполагаемая траектория транспортного средства 220, т.к. соседнее транспортное средство B имеет преимущество перед транспортным средством 220. Как описано выше, до определения по меньшей мере одной предполагаемой траектории для соседнего транспортного средства B процессору 110 может потребоваться определить по меньшей мере одну предполагаемую траекторию соседнего транспортного средства A. Поэтому процессор 110 может сначала определить по меньшей мере одну предполагаемую траекторию соседнего транспортного средства A, затем определить по меньшей мере одну предполагаемую траекторию соседнего транспортного средства B (обладая информацией о по меньшей мере одной предполагаемой траектории соседнего транспортного средства A), а затем определить по меньшей мере одну предполагаемую траекторию транспортного средства 220 (обладая информацией (а) о по меньшей мере одной предполагаемой траектории соседнего транспортного средства A и (б) о по меньшей мере одной предполагаемой траектории соседнего транспортного средства B).
[00145] В некоторых вариантах осуществления настоящей технологии процессор 110 может быть способным определять целевую траекторию транспортного средства 220. Например, процессор 110 может быть способным выбирать одну из предполагаемых траекторий транспортного средства 220 в качестве целевой траектории транспортного средства 220 (целевая траектория представляет собой фактическую траекторию, которую транспортное средство 220 должно использовать в представленном на фиг. 3 примере ситуации).
[00146] Таким образом, для определения целевой траектории транспортного средства 220 процессор 110 может сначала определить по меньшей мере одну предполагаемую траекторию транспортного средства 220. Как описано выше, процессор 110 может определить по меньшей мере одну предполагаемую траекторию транспортного средства 220 в соответствии с порядком определения траекторий.
[00147] Предполагается, что процессор 110 может использовать порядок оценивания траекторий для определения того, что для определения по меньшей мере одной предполагаемой траектории транспортного средства 220 не требуется определять предполагаемые траектории соседних транспортных средств C и D, поскольку, как описано выше, приоритет транспортного средства 220 не зависит от приоритетов соседних транспортных средств C и D.
[00148] Например, четвертая вершина 420 и пятая вершина 422, связанные с соседним транспортным средством D и с соседним транспортным средством C, соответственно, входят в состав второй графовой структуры 404, а не первой графой структуры 402 и, следовательно, не входят в состав порядка оценивания траекторий, содержащего транспортное средство 220 (порядок оценивания траекторий транспортного средства 220 основан на первой основанной на приоритетах иерархии первой графой структуры 402, а не на второй основанной на приоритетах иерархии второй графовой структуры 404).
[00149] Кроме того, процессор 110 может использовать порядок оценивания траекторий для определения того, что для определения по меньшей мере одной предполагаемой траектории транспортного средства 220 требуется определить предполагаемые траектории соседних транспортных средств A и B.
[00150] Иными словами, в по меньшей мере некоторых вариантах осуществления настоящей технологии процессор 110 может использовать порядок оценивания траекторий для выполнения следующей последовательности обработки:
(а) активное или пассивное определение того, что для определения по меньшей мере одной предполагаемой траектории транспортного средства 220 не требуется определять по меньшей мере одну предполагаемую траекторию соседнего транспортного средства C и по меньшей мере одну предполагаемую траекторию соседнего транспортного средства D;
(б) активное или пассивное определение того, что для определения по меньшей мере одной предполагаемой траектории транспортного средства 220 требуется определять по меньшей мере одну предполагаемую траекторию соседнего транспортного средства A и по меньшей мере одну предполагаемую траекторию соседнего транспортного средства B;
(в) определение по меньшей мере одной предполагаемой траектории соседнего транспортного средства A;
(г) определение по меньшей мере одной предполагаемой траектории соседнего транспортного средства B на основе по меньшей мере одной предполагаемой траектории соседнего транспортного средства A;
(д) определение по меньшей мере одной предполагаемой траектории транспортного средства 220 на основе по меньшей мере одной предполагаемой траектории соседнего транспортного средства A и на основе по меньшей мере одной предполагаемой траектории соседнего транспортного средства B.
[00151] Когда таким образом определена по меньшей мере одна предполагаемая траектория транспортного средства 220, процессор 110 может быть способным ввести по меньшей мере одну предполагаемую траекторию транспортного средства 220 в алгоритм MLA, обученный выбирать целевую траекторию транспортного средства 220 из числа предполагаемых траекторий транспортного средства 220.
[00152] Предполагается, что в некоторых случаях, помимо ввода по меньшей мере одной предполагаемой траектории транспортного средства 220, определенной процессором 110, в алгоритм MLA с целью получения в качестве выходных данных целевой траектории транспортного средства 220, процессор 110 также может быть способным вводить дополнительные используемые данные, указывающие на состояние по меньшей мере некоторых транспортных средств на участке схемы дорог.
[00153] В некоторых вариантах осуществления изобретения эти дополнительные используемые данные могут содержать кинематические данные по меньшей мере некоторых транспортных средств на участке схемы дорог. Например, дополнительные используемые данные, введенные в алгоритм MLA, процессором 110, могут содержать кинематические данные транспортных средств из первой основанной на приоритетах иерархии транспортных средств, содержащей транспортное средство 220. Это означает, что процессор 110 может ввести кинематические данные соседнего транспортного средства A и соседнего транспортного средства B, но не вводить кинематические данные соседнего транспортного средства C и соседнего транспортного средства D, поскольку они входят в состав второй основанной на приоритетах иерархии транспортных средств.
[00154] В контексте представленной на фиг. 3 ситуации алгоритм MLA может быть способным выдать целевую траекторию транспортного средства 220, указывающую на то, что транспортное средство 220 уступает дорогу соседним транспортным средствам A и B путем остановки, позволяет им проехать, а затем въезжает на главную дорогу после проезда соседних транспортных средств A и B.
[00155] Далее по меньшей мере одно потенциальное преимущество настоящей технологии описано со ссылкой на другой пример ситуации, представленный на фиг. 5. На фиг. 5 приведено графическое представление 500 другого участка схемы дорог. На фиг. 5 также приведено (а) графическое представление 520, соответствующее первому автономному транспортному средству, и (б) графическое представление 530, соответствующее второму автономному транспортному средству. В этом примере ситуации дорога на другом участке схемы дорог имеет две полосы движения 502, которые объединяются в одну полосу движения. Процесс принятия решения первым автономным транспортным средством и вторым автономным транспортным средством может включать в себя определение того, какое транспортное средство должно следовать первым, а какое должно уступить дорогу.
[00156] Разработчики настоящей технологии установили, что для обеспечения безопасности на дорогах конструкция автономных транспортных средств ориентирована на избегание риска. В этой связи, несмотря на то, что согласно правилам дорожного движения первое автономное транспортное средство имеет преимущество (право проезда в первую очередь) перед вторым автономным транспортным средством, первое автономное транспортное средство все же может решить уступить дорогу второму автономному транспортному средству, поскольку второе транспортное средство находится очень близко. Кроме того, вследствие склонности автономных транспортных средств к избеганию риска, второе автономное транспортное средство также может решить уступить дорогу первому автономному транспортному средству.
[00157] В связи с этим разработчики настоящей технологии установили, что в этой ситуации оба автономных транспортных средства вследствие их склонности к избеганию риска могут начать замедляться, пытаясь уступить дорогу друг другу.
[00158] Чтобы избежать подобных действий в парах автономных транспортных средств, разработчики настоящей технологии разработали системы, способные определять порядок оценивания траекторий. Как описано здесь, если эти системы реализованы в обоих автономных транспортных средствах, то оба автономных транспортных средства определяют одинаковый порядок оценивания траекторий. Следует отметить, что не важно, у какого из автономных транспортных средств, у первого или у второго, его предполагаемая траектория будет зависеть от другого транспортного средства (исходя из одного и того же порядка оценивания траекторий). Тем не менее, важно, чтобы вследствие определения одного и того же порядка оценивания траекторий зависимость предполагаемых траекторий определялась одинаково обоими автономными транспортными средствами и поэтому только одно из автономных транспортных средств принимало бы решение уступить дорогу, в то время как второе автономное транспортное средство принимало бы решение следовать первым.
[00159] По меньшей мере в некоторых вариантах осуществления настоящей технологии первое автономное транспортное средство и второе автономное транспортное средство могут быть способными обмениваться разнообразной информацией друг с другом. Это означает, что по меньшей мере в некоторых вариантах осуществления изобретения предполагается, что процессор 110 первого автономного транспортного средства может быть способным отправлять и/или инициировать отправку по меньшей мере некоторой информации процессору 110 второго автономного средства и наоборот.
[00160] Например, первое автономное транспортное средство может отправлять (и/или инициировать отправку) процессору 110 второго автономного транспортного средства информацию, указывающую на порядок оценивания траекторий, определенный процессором 110 первого автономного транспортного средства (и/или сервера 235). В другом примере первое автономное транспортное средство может отправлять второму транспортному средству кинематические данные, собранные с использованием соответствующей системы датчиков. В другом примере первое автономное транспортное средство может отправлять второму транспортному средству относящуюся к объектам информацию, собранную с использованием соответствующей системы датчиков. В еще одном примере первое автономное транспортное средство может отправлять второму автономному транспортному средству информацию, указывающую на целевую траекторию первого автономного транспортного средства.
[00161] Предполагается, что обмен такой информацией между первым автономным транспортным средством и вторым автономным транспортным средством может способствовать уменьшению обработки, которую процессор 110 второго автономного транспортного средства в противном случае должен был бы выполнить для определения этой информации, и предоставлению возможности выделения этих дополнительных ресурсов обработки для других целей. Кроме того, обмен такой информацией между первым автономным транспортным средством и вторым автономным транспортным средством может быть полезным, когда обзор для системы датчиков второго автономного транспортного средства по меньшей мере частично закрыт препятствиями и/или когда она находится в состоянии, препятствующем сбору по меньшей мере некоторой релевантной информации о соответствующей окружающей обстановке для принятия решений и/или для управления.
[00162] В некоторых вариантах осуществления настоящей технологии реализован способ 600 определения порядка оценивания траекторий транспортных средств, выполняемый процессором 110, таким как процессор 110 электронного устройства 210 и/или сервера 235. В некоторых вариантах осуществления изобретения по меньшей мере некоторые шаги способа 600 могут быть выполнены процессором 110 электронного устройства 210. В других вариантах осуществления изобретения по меньшей мере некоторые шаги способа 600 могут быть выполнены процессором 110 сервера 235. В дополнительных вариантах осуществления изобретения некоторые шаги способа 600 могут быть выполнены процессором 110 электронного устройства 210, а другие шаги способа 600 могут быть выполнены процессором 110 сервера 235 без выхода за границы настоящей технологии. Далее более подробно описан способ 600.
Шаг 602: определение пар транспортных средств с пересекающимися потенциальными траекториями на участке схемы дорог.
[00163] Способ 600 начинается с шага 602, на котором процессор 110 способен определять на участке схемы дорог пары транспортных средств с пересекающимися потенциальными траекториями. Предполагается, что в некоторых вариантах осуществления изобретения для выполнения шага 602 процессору 110, среди прочего, может быть доступной информация, указывающая на участок схемы дорог, соответствующий обстановке вокруг транспортного средства 220, и на правила дорожного движения, связанные с этим участком схемы дорог.
[00164] Например, для определения потенциальных траекторий соответствующих транспортных средств процессор 110 может быть способным использовать (а) информацию, указывающую на положение и ориентацию этих транспортных средств, и (б) информацию, указывающую на правила дорожного движения.
[00165] После определения потенциальных траекторий транспортных средств на участке схемы дорог процессор 110 может быть способным выполнять попарное сравнение транспортных средств, т.е. для каждой пары транспортных средств процессор 110 может определять, имеют ли транспортные средства в этой паре пересекающиеся потенциальные траектории. Также можно сказать, что после определения потенциальных траекторий транспортных средств на участке схемы дорог процессор 110 может быть способным определять, какие из этих потенциальных траекторий пересекаются, таким образом определяя на участке схемы дорог пары транспортных средств с пересекающимися потенциальными траекториями.
[00166] Как описано выше, в представленном на фиг. 3 примере ситуации процессор 110 может быть способным определить следующие пары транспортных средств:
(а) пара, состоящая из соседних транспортных средств A и B;
(б) пара, состоящая из соседнего транспортного средства A и транспортного средства 220;
(в) пара, состоящая из соседнего транспортного средства B и транспортного средства 220; и
(г) пара, состоящая из соседних транспортных средств C и D.
[00167] Следует отметить, что в представленной на фиг. 3 ситуации процессор 110 может, например, быть способным не определять пару, состоящую из соседних транспортных средств A и D, поскольку они не имеют пересекающихся потенциальных траекторий. Таким образом, можно сказать, что определенные процессором 110 пары транспортных средств (имеющие пересекающиеся потенциальные траектории) могут включать или не включать в себя все возможные пары транспортных средств на участке схемы дорог, т.е. что определенные процессором 110 пары транспортных средств зависят, среди прочего, от ситуации, в которой находится транспортное средство 220.
Шаг 604: определение информации о приоритете транспортных средств, указывающей на приоритеты транспортных средств на участке схемы дорог.
[00168] Способ 600 продолжается на шаге 604, на котором процессор 110 способен определять информацию о приоритете транспортных средств, указывающую на приоритеты транспортных средств на участке схемы дорог. Следует отметить, что на шаге 604 процессор 110 может быть способным использовать правила дорожного движения для определения транспортного средства в соответствующей паре транспортных средств (определенной на шаге 602), имеющего преимущество перед другим транспортным средством в соответствующей паре транспортных средств.
[00169] Предполагается, что процессор 110 может быть способным обрабатывать каждую определенную пару транспортных средств (индивидуально) для определения транспортного средства в соответствующей паре транспортных средств, имеющего преимущество перед другим транспортным средством в соответствующей паре транспортных средств. Например, с этой целью процессор 110 может быть способным использовать (а) правила дорожного движения и (б) положение и ориентацию транспортных средств из соответствующих пар. Иными словами, процессор 110 может быть способным обрабатывать вышеупомянутые пары транспортных средств для определения информации о приоритете транспортных средств, указывающей на приоритеты транспортных средств на участке схемы дорог. Например, путем обработки вышеупомянутых пар транспортных средств (см. фиг. 3) процессор 110 может определить (например, на основе правил дорожного движения), что:
(а) в паре, состоящей из соседних транспортных средств A и B, соседнее транспортное средство A имеет преимущество перед соседним транспортным средством B;
(б) в паре, состоящей из соседнего транспортного средства A и транспортного средства 220, соседнее транспортное средство A имеет преимущество перед транспортным средством 220;
(в) в паре, состоящей из соседнего транспортного средства B и транспортного средства 220, соседнее транспортное средство B имеет преимущество перед транспортным средством 220; и
(г) в паре, состоящей из соседних транспортных средств С и D, соседнее транспортное средство D имеет преимущество перед соседним транспортным средством C.
[00170] Приведенный выше список результатов определения, сформированных процессором 110, может содержать информацию о приоритете транспортных средств на участке схемы дорог. Процессор 110 может быть способным определять эту информацию о приоритете транспортных средств в различных форматах.
[00171] Согласно по меньшей мере некоторым вариантам осуществления настоящей технологии, процессор 110 может быть способным определять информацию о приоритете транспортных средств в виде одной или нескольких графовых структур. Например, процессор 110 может быть способным формировать по меньшей мере одну графовую структуру. По меньшей одна графовая структура содержит вершины и ребра, где ребро соединяет пару вершин. Пара вершин указывает на соответствующую пару транспортных средств на участке схемы дорог, а ребро указывает на первое транспортное средство в соответствующей паре транспортных средств, имеющее преимущество перед вторым транспортным средством в соответствующей паре транспортных средств.
[00172] Предполагается, что, как описано выше, графовая структура может являться иерархической структурой, указывающей на основанную на приоритетах иерархию транспортных средств. Например, первая графовая структура 402 и вторая графовая структура 404 представляют собой иерархические структуры, т.е. графовая структура, сформированная процессором 110, указывает на основанную на приоритетах иерархию транспортных средств, связанных с соответствующими вершинами графовой структуры (см. фиг. 4). Это означает, что в представленной на фиг. 3 ситуации процессор 110 может быть способным сформировать две графовые структуры и, следовательно, две основанных на приоритетах иерархии транспортных средств.
[00173] В случае первой графовой структуры 402 соседнее транспортное средство A находится на верхнем уровне основанной на приоритетах иерархии, содержащей (а) соседнее транспортное средство A, (б) соседнее транспортное средство B и (в) транспортное средство 220.
[00174] В контексте данного описания транспортное средство, находящееся на верхнем уровне основанной на приоритетах иерархии, называется главным транспортным средством. Например, в первой графовой структуре 402, которая указывает на первую основанную на приоритетах иерархию, содержащую (а) соседнее транспортное средство A, (б) соседнее транспортное средство B и (в) транспортное средство 220, главное транспортное средство представляет собой соседнее транспортное средство A. В другом примере во второй графовой структуре 404, которая указывает на вторую основанную на приоритетах иерархию, содержащую (а) соседнее транспортное средство C и (б) соседнее транспортное средство D, главное транспортное средство представляет собой соседнее транспортное средство D.
[00175] Следует отметить, что главное транспортное средство в основанной на приоритетах иерархии транспортных средств представляет собой транспортное средство, имеющее преимущество перед всеми другими транспортными средствами в этой основанной на приоритетах иерархии. Иными словами, это означает, что главное транспортное средство может выбирать любую потенциальную траекторию, имея при этом право проезжать перед любым другим транспортным средством в основанной на приоритетах иерархии.
[00176] В некоторых вариантах осуществления настоящей технологии можно сказать, что главное транспортное средство в основанной на приоритетах иерархии представляет собой транспортное средство, меньше зависящее от других транспортных средств в основанной на приоритетах иерархии, чем любое другое транспортное средство в этой основанной на приоритетах иерархии.
[00177] Следует также отметить, что приоритеты транспортных средств, связанных с вершинами первой графовой структуры 402 (и, следовательно, транспортных средств из первой основанной на приоритетах иерархии), не зависят от приоритетов транспортных средств, связанных с вершинами второй графовой структуры 404 (и, следовательно, транспортных средств из второй основанной на приоритетах иерархии). Иными словами, это означает, что любая потенциальная траектория любого транспортного средства из первой основанной на приоритетах иерархии не зависит от какой-либо потенциальной траектории любого другого транспортного средства из второй основанной на приоритетах иерархии.
[00178] Таким образом, как описано выше, можно сказать, что на верхнем уровне иерархической структуры, указывающей на основанную на приоритетах иерархию набора транспортных средств, находится главное транспортное средство, меньше зависящее от других транспортных средств в основанной на приоритетах иерархии, чем любое другое транспортное средство в этой основанной на приоритетах иерархии.
[00179] Также можно сказать, что в некоторых вариантах осуществления изобретения процессор 110 может быть способным формировать множество графовых структур, содержащих множество иерархических структур, каждая из которых указывает на соответствующую основанную на приоритетах иерархию соответствующих транспортных средств. Кроме того, на верхнем уровне каждой иерархической структуры может находиться соответствующее главное транспортное средство, представляющее собой транспортное средство, меньше зависящее от других транспортных средств в соответствующей основанной на приоритетах иерархии, чем любое другое транспортное средство в соответствующей основанной на приоритетах иерархии.
Шаг 606: определение порядка оценивания траекторий транспортных средств на участке схемы дорог.
[00180] Способ 600 продолжается на шаге 606, на котором процессор 110 способен на основе информации о приоритете транспортных средств определять порядок оценивания траекторий транспортных средств на участке схемы дорог. Процессор 110 способен определять порядок оценивания траекторий так, чтобы транспортное средство, имеющее преимущество перед другим транспортным средством согласно информации о приоритете транспортных средств, занимало более высокую позицию в порядке оценивания траекторий, чем другое транспортное средство.
[00181] Предполагается, что процессор 110 может быть способным определять порядок оценивания траекторий так, чтобы он был согласован с основанной на приоритетах иерархией транспортных средств из графовой структуры.
[00182] Как описано выше, можно рассмотреть в качестве примера первую графовую структуру 402. Как описано выше, в первой основанной на приоритетах иерархии транспортных средств из первой графовой структуры 402 (а) соседнее транспортное средство A имеет преимущество перед всеми остальными транспортными средствами в первой графовой структуре (т.е. соседнее транспортное средство A представляет собой главное транспортное средство), (б) соседнее транспортное средство B представляет собой второе транспортное средство в первой основанной на приоритетах иерархии (т.е. не имеет преимущества перед перед главным транспортным средством) и (в) транспортное средство 220 представляет собой третье транспортное средство в первой основанной на приоритетах иерархии (т.е. не имеет преимущества перед главным транспортным средством и вторым транспортным средством из первой основанной на приоритетах иерархии). Таким образом, процессор 110 может быть способным определить следующий порядок оценивания траекторий для соседнего транспортного средства A, соседнего транспортного средства B и транспортного средства 220:
(а) по меньшей мере одна предполагаемая траектория соседнего транспортного средства A должна быть определена первой;
(б) по меньшей мере одна предполагаемая траектория соседнего транспортного средства B должна быть определена после по меньшей мере одной предполагаемой траектории соседнего транспортного средства A;
(в) по меньшей мере одна предполагаемая траектория транспортного средства 220 должна быть определена после по меньшей мере одной предполагаемой траектории соседнего транспортного средства A и после по меньшей мере одной предполагаемой траектории соседнего транспортного средства B.
[00183] Причина такого порядка определения траекторий заключается в том, что, например, для определения по меньшей мере одной предполагаемой траектории соседнего транспортного средства B сначала следует определить по меньшей мере одну предполагаемую траекторию соседнего транспортного средства A, поскольку от нее может зависеть по меньшей мере одна предполагаемая траектория соседнего транспортного средства B, т.к. соседнее транспортное средство A имеет преимущество перед соседним транспортным средством B.
[00184] Кроме того, например, до определения по меньшей мере одной предполагаемой траектории транспортного средства 220 сначала следует определить по меньшей мере одну предполагаемую траекторию соседнего транспортного средства B, поскольку от нее может зависеть по меньшей мере одна предполагаемая траектория транспортного средства 220, т.к. соседнее транспортное средство B имеет преимущество перед транспортным средством 220. Как описано выше, до определения по меньшей мере одной предполагаемой траектории для соседнего транспортного средства B процессору 110 может потребоваться определить по меньшей мере одну предполагаемую траекторию соседнего транспортного средства A. Поэтому процессор 110 может сначала определить по меньшей мере одну предполагаемую траекторию соседнего транспортного средства A, затем определить по меньшей мере одну предполагаемую траекторию соседнего транспортного средства B (обладая информацией о по меньшей мере одной предполагаемой траектории соседнего транспортного средства A), а после этого определить по меньшей мере одну предполагаемую траекторию транспортного средства 220 (обладая информацией (а) о по меньшей мере одной предполагаемой траектории соседнего транспортного средства A и (б) о по меньшей мере одной предполагаемой траектории соседнего транспортного средства B).
[00185] В некоторых вариантах осуществления настоящей технологии процессор 110 может быть способным определять целевую траекторию транспортного средства 220. Например, процессор 110 может быть способным выбирать одну из предполагаемых траекторий транспортного средства 220 в качестве целевой траектории транспортного средства 220 (целевая траектория представляет собой фактическую траекторию, которую транспортное средство 220 должно использовать в представленном на фиг. 3 примере ситуации).
[00186] Таким образом, для определения целевой траектории транспортного средства 220 процессор 110 может сначала определять по меньшей мере одну предполагаемую траекторию транспортного средства 220. Как описано выше, процессор 110 может определять по меньшей мере одну предполагаемую траекторию транспортного средства 220 в соответствии с порядком определения траекторий.
[00187] Предполагается, что процессор 110 может использовать порядок оценивания траекторий для установления того, что для определения по меньшей мере одной предполагаемой траектории транспортного средства 220 не требуется определять предполагаемые траектории соседних транспортных средств C и D, поскольку, как описано выше, приоритет транспортного средства 220 не зависит от приоритетов соседних транспортных средств C и D.
[00188] Таким образом предполагается, что процессор 110 может использовать порядок оценивания траекторий для определения предполагаемых траекторий транспортных средств на участке схемы дорог так, чтобы (а) по меньшей мере одна предполагаемая траектория данного транспортного средства определялась до определения по меньшей мере одной предполагаемой траектории другого транспортного средства и (б) по меньшей мере одна предполагаемая траектория другого транспортного средства определялась с учетом по меньшей мере одной предполагаемой траектории данного транспортного средства.
[00189] Также предполагается, что порядок оценивания траекторий для основанной на приоритетах иерархии начинается с соответствующего главного транспортного средства. Также предполагается, что при определении по меньшей мере одной предполагаемой траектории транспортного средства 220 процессор 110 может быть способным формировать предполагаемые траектории транспортных средств, занимающих более высокие позиции в связанном с транспортным средством 220 порядке оценивания траекторий, чем транспортное средство 220, начиная с соответствующего главного транспортного средства и продолжая в соответствии с этим порядком оценивания траекторий.
[00190] В некоторых вариантах осуществления изобретения для определения по меньшей мере одной предполагаемой траектории транспортного средства 220 может не требоваться определение предполагаемых траекторий транспортных средств, не входящих в состав того же порядка оценивания траекторий, что и транспортное средство 220. В других вариантах осуществления изобретения для определения по меньшей мере одной предполагаемой траектории транспортного средства 220 может не требоваться определение предполагаемых траекторий транспортных средств, не входящих в состав той же основанной на приоритетах иерархии, что и транспортное средство 220. В других вариантах осуществления изобретения для определения по меньшей мере одной предполагаемой траектории транспортного средства 220 может не требоваться определение предполагаемых траекторий транспортных средств, не входящих в состав той же иерархической структуры, что и транспортное средство 220. В дополнительных вариантах осуществления изобретения для определения по меньшей мере одной предполагаемой траектории транспортного средства 220 может не требоваться определение предполагаемых траекторий транспортных средств, не входящих в состав той же графовой структуры, что и транспортное средство 220.
[00191] В некоторых вариантах осуществления изобретения при выполнении способа 600 процессор 110 может быть способным использовать предполагаемые траектории транспортных средств (определенные в соответствии с порядком оценивания траекторий) на участке схемы дорог для определения целевой траектории транспортного средства 220. Например, в некоторых случаях процессор 110 может вводить в алгоритм MLA предполагаемые траектории транспортных средств, находящихся на более высоких уровнях содержащей транспортное средство 220 основанной на приоритетах иерархии, чем транспортное средство 220, и по меньшей мере одну предполагаемую траекторию транспортного средства 220. Как описано выше, алгоритм MLA может быть способным использовать по меньшей мере предполагаемые траектории, введенные процессором 110, для выдачи целевой траектории транспортного средства 220.
[00192] В некоторых вариантах осуществления изобретения процессор 110 может дополнительно вводить в алгоритм MLA кинематические данные транспортных средств, находящихся на более высоких уровнях содержащей транспортное средство 220 основанной на приоритетах иерархии, чем транспортное средство 220, так, чтобы алгоритм MLA учитывал эти кинематические данные при выдаче целевой траектории транспортного средства 220.
[00193] Предполагается, что кинематические данные могут содержать положение и/или скорость и/или ускорение транспортных средств, находящихся на более высоких уровнях содержащей транспортное средство 220 основанной на приоритетах иерархии, чем транспортное средство 220. Например, кинематические данные могут быть собраны системой 230 датчиков транспортного средства 220.
[00194] В некоторых вариантах осуществления настоящей технологии предполагается, что по меньшей мере два транспортных средства на участке схемы дорог могут представлять собой автономные транспортные средства. Например, на участке схемы дорог могут находиться первое автономное транспортное средство и второе автономное транспортное средство. В некоторых вариантах осуществления изобретения процессор 110 первого автономного транспортного средства может быть способным отправлять (и/или инициировать отправку) второму транспортному средству информацию, указывающую на порядок оценивания траекторий. В других вариантах осуществления изобретения процессор 110 первого автономного транспортного средства может быть способным отправлять (и/или инициировать отправку) второму транспортному средству кинематические данные. В других вариантах осуществления изобретения процессор 110 первого автономного транспортного средства может быть способным отправлять (и/или инициировать отправку) второму транспортному средству относящуюся к объектам информацию. В дополнительных вариантах осуществления изобретения процессор 110 первого автономного транспортного средства может быть способным отправлять (и/или инициировать отправку) второму транспортному средству информацию, указывающую на целевую траекторию первого автономного транспортного средства.
[00195] Для специалиста в данной области могут быть очевидными возможные изменения и усовершенствования описанных выше вариантов осуществления настоящей технологии. Предшествующее описание приведено лишь в иллюстративных целях, а не для ограничения объема изобретения. Объем охраны настоящей технологии определяется исключительно объемом приложенной формулы изобретения.
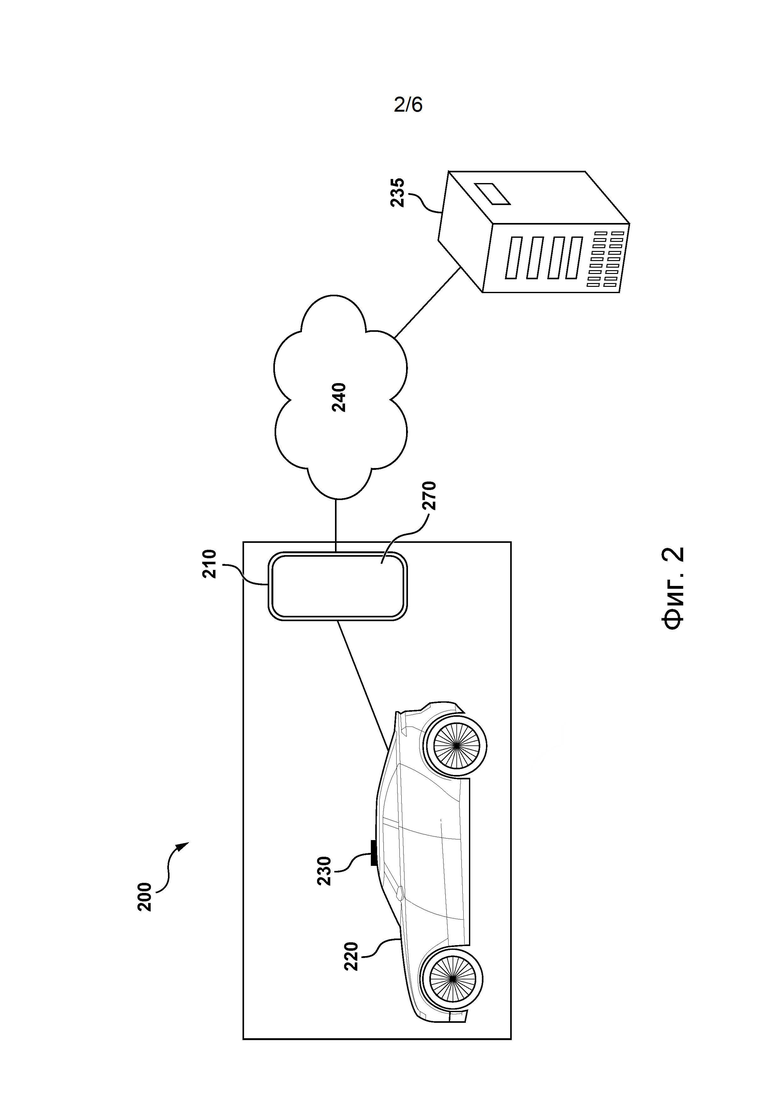
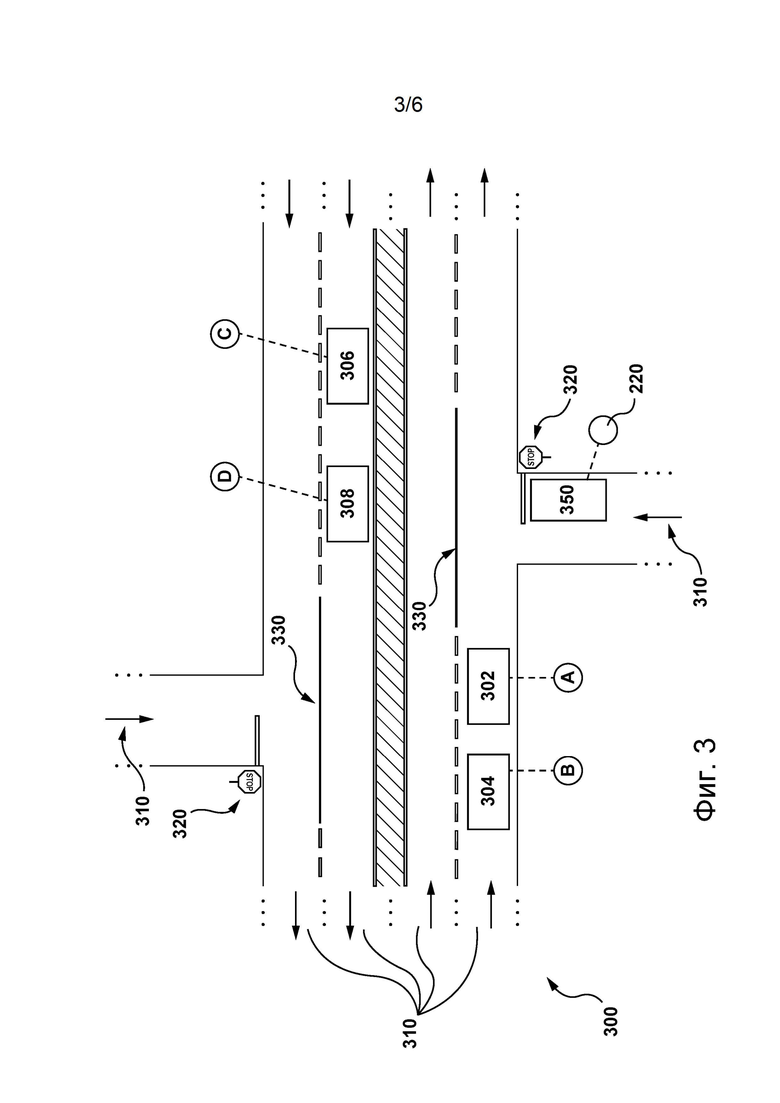
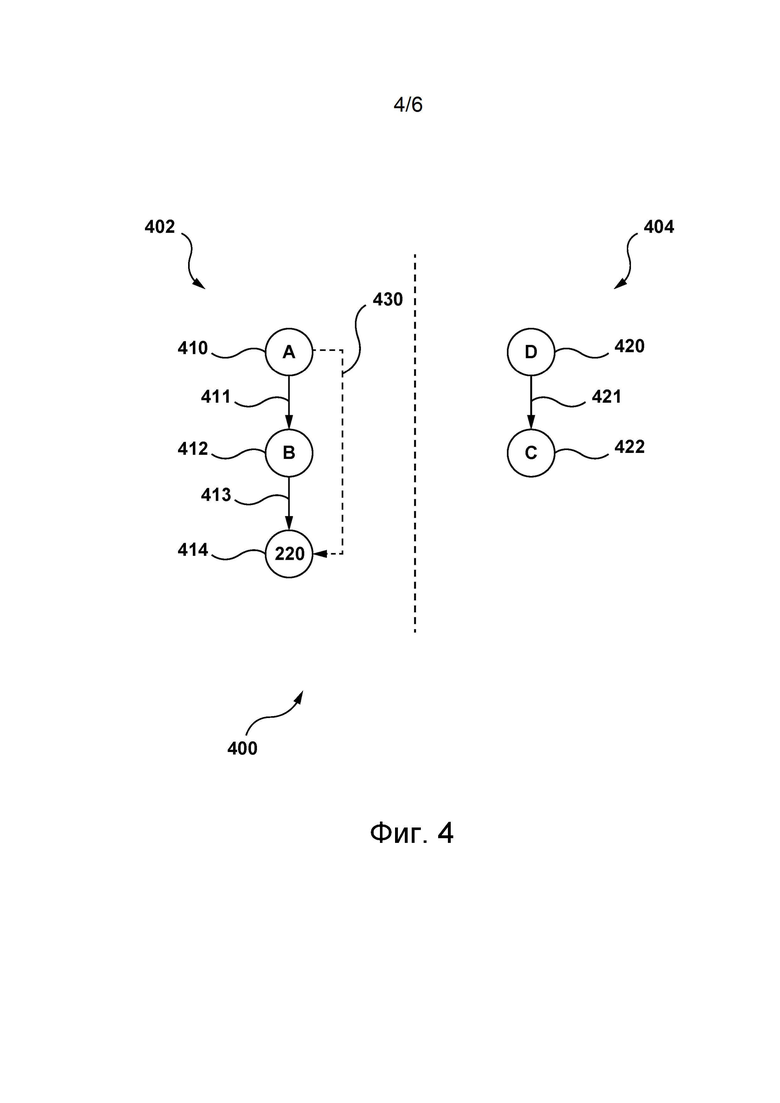
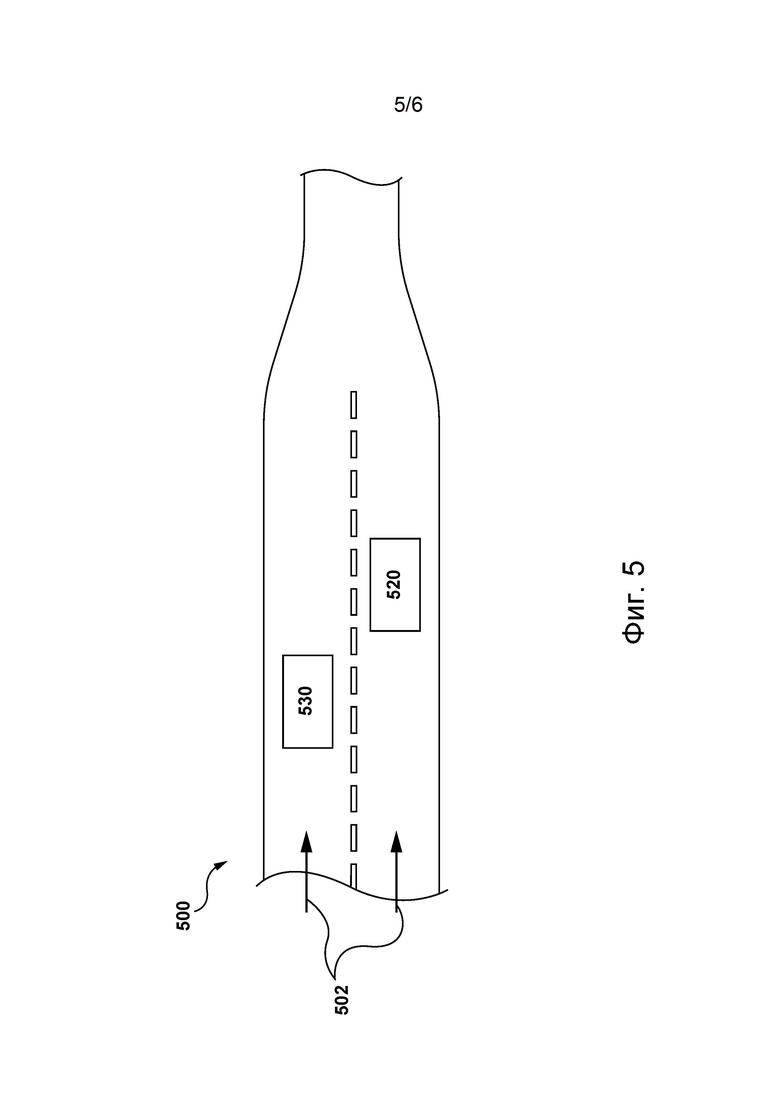
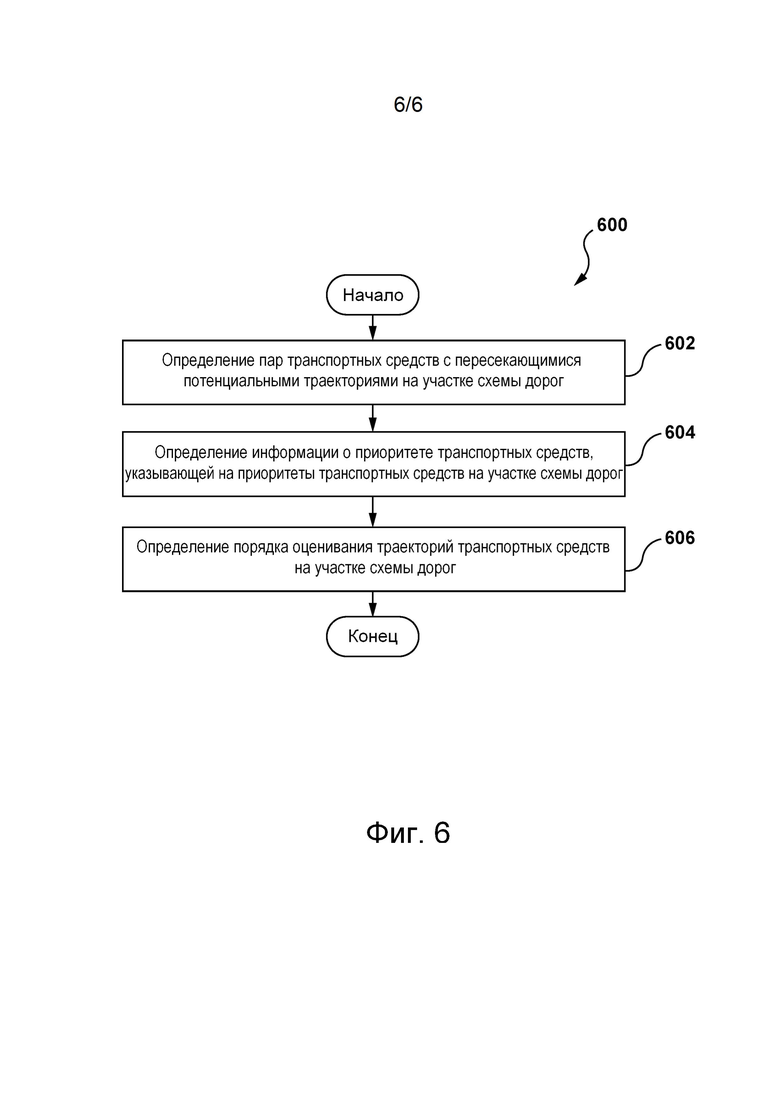
Изобретение относится к способам и системам определения порядка оценивания траекторий транспортных средств. Способ определения порядка оценивания траекторий транспортных средств, одно из которых имеет связь с процессором, имеющим доступ к информации, указывающей на участок схемы дорог, соответствующий обстановке вокруг одного из транспортных средств, и на правила дорожного движения, связанные с участком схемы дорог. Способ выполняется процессором и содержит определение процессором пар транспортных средств с пересекающимися потенциальными траекториями на участке схемы дорог, определение процессором информации о приоритете транспортных средств и определение процессором на основе информации о приоритете транспортных средств порядка оценивания траекторий транспортных средств на участке схемы дорог так, чтобы транспортное средство, имеющее преимущество перед другим транспортным средством, занимало более высокую позицию в порядке оценивания траекторий, чем другое транспортное средство. Достигается повышение безопасности управления транспортным средством. 2 н. и 40 з.п. ф-лы, 6 ил.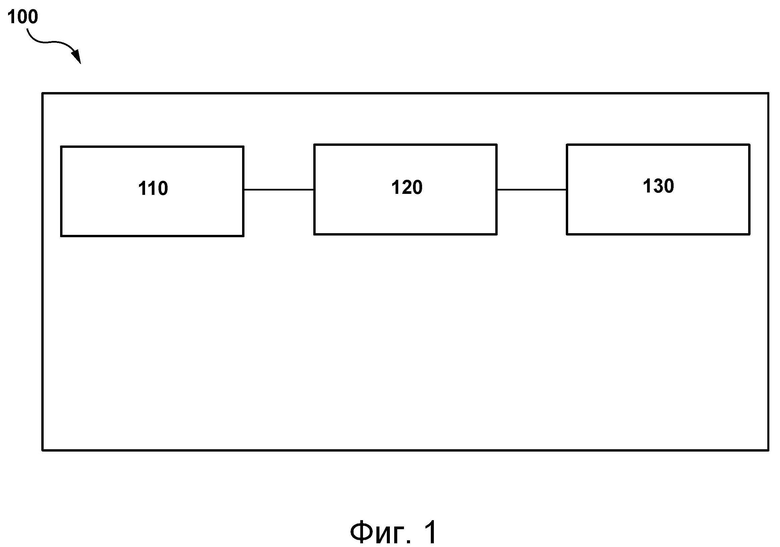
1. Способ определения порядка оценивания траекторий транспортных средств, одно из которых имеет связь с процессором, имеющим доступ к информации, указывающей на участок схемы дорог, соответствующий обстановке вокруг одного из транспортных средств, и на правила дорожного движения, связанные с участком схемы дорог, при этом способ выполняется процессором и включает в себя:
- определение процессором пар транспортных средств с пересекающимися потенциальными траекториями на участке схемы дорог;
- определение процессором информации о приоритете транспортных средств, указывающей на приоритеты транспортных средств на участке схемы дорог, включая использование процессором правил дорожного движения для определения того, какое транспортное средство в соответствующей паре транспортных средств имеет преимущество перед другим транспортным средством в соответствующей паре транспортных средств; и
- определение процессором на основе информации о приоритете транспортных средств порядка оценивания траекторий транспортных средств на участке схемы дорог так, чтобы транспортное средство, имеющее преимущество перед другим транспортным средством согласно информации о приоритете транспортных средств, занимало более высокую позицию в порядке оценивания траекторий, чем другое транспортное средство.
2. Способ по п. 1, отличающийся тем, что он дополнительно включает в себя использование процессором порядка оценивания траекторий для определения предполагаемых траекторий транспортных средств на участке схемы дорог так, чтобы:
- по меньшей мере одна предполагаемая траектория данного транспортного средства определялась до определения по меньшей мере одной предполагаемой траектории другого транспортного средства; и
- по меньшей мере одна предполагаемая траектория другого транспортного средства определялась с учетом по меньшей мере одной предполагаемой траектории данного транспортного средства.
3. Способ по п. 1, отличающийся тем, что определение информации о приоритете транспортных средств включает в себя формирование процессором графовой структуры, содержащей вершины и ребра, при этом ребро соединяет пару вершин, пара вершин указывает на соответствующую пару транспортных средств на участке схемы дорог, а ребро указывает на первое транспортное средство в соответствующей паре транспортных средств, имеющее преимущество перед вторым транспортным средством в соответствующей паре транспортных средств.
4. Способ по п. 2, отличающийся тем, что дополнительно включает в себя использование процессором предполагаемых траекторий транспортных средств на участке схемы дорог для определения целевой траектории одного из транспортных средств.
5. Способ по п. 4, отличающийся тем, что использование предполагаемых траекторий включает в себя ввод процессором предполагаемых траекторий транспортных средств в алгоритм машинного обучения (MLA), способный использовать по меньшей мере предполагаемые траектории транспортных средств для выдачи целевой траектории одного из транспортных средств.
6. Способ по п. 5, отличающийся тем, что алгоритм MLA дополнительно способен использовать кинематические данные по меньшей мере одного из транспортных средств для выдачи целевой траектории одного из транспортных средств.
7. Способ по п. 6, отличающийся тем, что кинематические данные содержат по меньшей мере одно из следующего: положение по меньшей мере одного из транспортных средств, скорость по меньшей мере одного из транспортных средств и ускорение по меньшей мере одного из транспортных средств.
8. Способ по п. 6, отличающийся тем, что кинематические данные собираются системой датчиков, связанной с одним из транспортных средств.
9. Способ по п. 1, отличающийся тем, что процессору дополнительно доступна информация, указывающая на положение транспортных средств на участке схемы дорог.
10. Способ по п. 9, отличающийся тем, что информация, указывающая на положение, собирается системой датчиков, связанной с одним из транспортных средств.
11. Способ по п. 10, отличающийся тем, что одно из транспортных средств оснащено системой датчиков.
12. Способ по п. 3, отличающийся тем, что графовая структура является иерархической структурой, указывающей на основанную на приоритетах иерархию транспортных средств, где на верхнем уровне находится главное транспортное средство, меньше зависящее от других транспортных средств в основанной на приоритетах иерархии, чем любое другое транспортное средство в основанной на приоритетах иерархии.
13. Способ по п. 12, отличающийся тем, что определение информации о приоритете транспортных средств включает в себя формирование множества графовых структур, содержащего множество иерархических структур, каждая из которых указывает на соответствующую основанную на приоритетах иерархию соответствующих транспортных средств, при этом на верхнем уровне каждой иерархической структуры находится соответствующее главное транспортное средство, меньше зависящее от других транспортных средств в соответствующей основанной на приоритетах иерархии, чем любое другое транспортное средство в соответствующей основанной на приоритетах иерархии.
14. Способ по п. 13, отличающийся тем, что порядок оценивания траекторий для основанной на приоритетах иерархии начинается с соответствующего главного транспортного средства.
15. Способ по п. 14, отличающийся тем, что для определения по меньшей мере одной предполагаемой траектории для одного из транспортных средств способ дополнительно включает в себя формирование по меньшей мере одной предполагаемой траектории для транспортных средств, занимающих более высокую позицию в порядке, чем одно из транспортных средств, начиная с соответствующего главного транспортного средства и продолжая в соответствии с упомянутым порядком.
16. Способ по п. 15, отличающийся тем, что в нем исключено определение по меньшей мере одной предполагаемой траектории для транспортных средств, занимающих более низкую позицию в упомянутом порядке, чем одно из транспортных средств.
17. Способ по п. 1, отличающийся тем, что одно из транспортных средств и другое транспортное средство представляют собой автономные транспортные средства.
18. Способ по п. 17, отличающийся тем, что дополнительно включает в себя отправку другому транспортному средству информации, указывающей на порядок оценивания траекторий.
19. Способ по п. 17, отличающийся тем, что одному из транспортных средств доступны кинематические данные по меньшей мере одного из транспортных средств, а способ дополнительно включает в себя отправку другому транспортному средству этих кинематических данных.
20. Способ по п. 17, отличающийся тем, что одному из транспортных средств доступна относящаяся к объектам информация об объектах на участке схемы дорог, а способ дополнительно включает в себя отправку другому транспортному средству этой относящейся к объектам информации.
21. Способ по п. 17, отличающийся тем, что дополнительно включает в себя определение целевой траектории одного из транспортных средств и отправку другому транспортному средству информации, указывающей на эту целевую траекторию.
22. Процессор для определения порядка оценивания траекторий транспортных средств, одно из которых имеет связь с процессором, имеющим доступ к информации, указывающей на участок схемы дорог, соответствующий обстановке вокруг одного из транспортных средств, и на правила дорожного движения, связанные с участком схемы дорог, при этом процессор способен:
- определять пары транспортных средств с пересекающимися потенциальными траекториями на участке схемы дорог;
- определять информацию о приоритете транспортных средств, указывающую на приоритеты транспортных средств на участке схемы дорог, при этом для определения информации о приоритете транспортных средств процессор способен использовать правила дорожного движения для определения того, какое транспортное средство в соответствующей паре транспортных средств имеет преимущество перед другим транспортным средством в соответствующей паре транспортных средств; и
- определять на основе информации о приоритете транспортных средств порядок оценивания траекторий транспортных средств на участке схемы дорог так, чтобы транспортное средство, имеющее преимущество перед другим транспортным средством согласно информации о приоритете транспортных средств, занимало более высокую позицию в порядке оценивания траекторий, чем другое транспортное средство.
23. Процессор по п. 22, отличающийся тем, что он дополнительно способен использовать порядок оценивания траекторий для определения предполагаемых траекторий транспортных средств на участке схемы дорог так, чтобы:
- по меньшей мере одна предполагаемая траектория данного транспортного средства определялась до определения по меньшей мере одной предполагаемой траектории другого транспортного средства; и
- по меньшей мере одна предполагаемая траектория другого транспортного средства определялась с учетом по меньшей мере одной предполагаемой траектории данного транспортного средства.
24. Процессор по п. 22, отличающийся тем, что его способность определять информацию о приоритете транспортных средств включает в себя способность формировать графовую структуру, содержащую вершины и ребра, при этом ребро соединяет пару вершин, пара вершин указывает на соответствующую пару транспортных средств на участке схемы дорог, а ребро указывает на первое транспортное средство в соответствующей паре транспортных средств, имеющее преимущество перед вторым транспортным средством в соответствующей паре транспортных средств.
25. Процессор по п. 23, отличающийся тем, что он дополнительно способен использовать предполагаемые траектории транспортных средств на участке схемы дорог для определения целевой траектории одного из транспортных средств.
26. Процессор по п. 25, отличающийся тем, что его способность использовать предполагаемые траектории включает в себя способность ввода предполагаемых траекторий транспортных средств в алгоритм MLA, способный использовать по меньшей мере предполагаемые траектории транспортных средств для выдачи целевой траектории одного из транспортных средств.
27. Процессор по п. 26, отличающийся тем, что алгоритм MLA дополнительно способен использовать кинематические данные по меньшей мере одного из транспортных средств для выдачи целевой траектории одного из транспортных средств.
28. Процессор по п. 27, отличающийся тем, что кинематические данные содержат по меньшей мере одно из следующего: положение по меньшей мере одного из транспортных средств, скорость по меньшей мере одного из транспортных средств и ускорение по меньшей мере одного из транспортных средств.
29. Процессор по п. 27, отличающийся тем, что кинематические данные собраны системой датчиков, связанной с одним из транспортных средств.
30. Процессор по п. 22, отличающийся тем, что ему дополнительно доступна информация, указывающая на положение транспортных средств на участке схемы дорог.
31. Процессор по п. 30, отличающийся тем, что информация, указывающая на положение, собрана системой датчиков, связанной с одним из транспортных средств.
32. Процессор по п. 31, отличающийся тем, что одно из транспортных средств оснащено системой датчиков.
33. Процессор по п. 24, отличающийся тем, что графовая структура является иерархической структурой, указывающей на основанную на приоритетах иерархию транспортных средств, где на верхнем уровне находится главное транспортное средство, меньше зависящее от других транспортных средств в основанной на приоритетах иерархии, чем любое другое транспортное средство в основанной на приоритетах иерархии.
34. Процессор по п. 33, отличающийся тем, что его способность определять информацию о приоритете транспортных средств включает в себя способность формировать множество графовых структур, содержащее множество иерархических структур, каждая из которых указывает на соответствующую основанную на приоритетах иерархию соответствующих транспортных средств, при этом на верхнем уровне каждой иерархической структуры находится соответствующее главное транспортное средство, меньше зависящее от других транспортных средств в соответствующей основанной на приоритетах иерархии, чем любое другое транспортное средство в соответствующей основанной на приоритетах иерархии.
35. Процессор по п. 34, отличающийся тем, что порядок оценивания траекторий для основанной на приоритетах иерархии начинается с соответствующего главного транспортного средства.
36. Процессор по п. 35, отличающийся тем, что он способен определять по меньшей мере одну предполагаемую траекторию для одного из транспортных средств и дополнительно способен формировать по меньшей мере одну предполагаемую траекторию для транспортных средств, занимающих более высокую позицию в упомянутом порядке, чем одно из транспортных средств, начиная с соответствующего главного транспортного средства и продолжая в соответствии с упомянутым порядком.
37. Процессор по п. 36, отличающийся тем, что он дополнительно способен исключать определение по меньшей мере одной предполагаемой траектории для транспортных средств, занимающих более низкую позицию в упомянутом порядке, чем одно из транспортных средств.
38. Процессор по п. 22, отличающийся тем, что одно из транспортных средств и другое транспортное средство представляют собой автономные транспортные средства.
39. Процессор по п. 38, отличающийся тем, что он дополнительно способен отправлять другому транспортному средству информацию, указывающую на порядок оценивания траекторий.
40. Процессор по п. 38, отличающийся тем, что одному из транспортных средств доступны кинематические данные по меньшей мере одного из транспортных средств и процессор дополнительно способен отправлять другому транспортному средству эти кинематические данные.
41. Процессор по п. 38, отличающийся тем, что одному из транспортных средств доступна относящаяся к объектам информация об объектах на участке схемы дорог и процессор дополнительно способен отправлять другому транспортному средству эту относящуюся к объектам информацию.
42. Процессор по п. 38, отличающийся тем, что он способен определять целевую траекторию одного из транспортных средств и отправлять другому транспортному средству информацию, указывающую на эту целевую траекторию.
| US 20180239361 A1, 23.08.2018 | |||
| US 9672446 B1, 06.06.2017 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2016 |
|
RU2638879C2 |

