Область техники
Настоящее изобретение относится к системе автоматического управления транспортным средством.
Уровень техники
Согласно документу US 2010/0228420 A, например, существует система автоматического управления транспортным средством, которая управляет движением транспортного средства. Такая система автоматического управления транспортным средством, например, вычисляет траекторию, по которой должно двигаться транспортное средство, и управляет рулевым механизмом таким образом, чтобы транспортное средство двигалось по вычисленной траектории.
В частности, поведение транспортного средства в случае, когда транспортное средство незначительно отклоняется от траектории, по которой должно двигаться транспортное средство, отличается от поведения транспортного средства в случае, когда транспортное средство значительно отклоняется от траектории, по которой должно двигаться транспортное средство. Однако соответствующая система автоматического управления транспортным средством управляет движением транспортного средства по направлению к траектории, по которой должно двигаться транспортное средство, аналогичным образом, как в случае, когда транспортное средство незначительно отклоняется от траектории, по которой должно двигаться транспортное средство, так и в случае, когда транспортное средство значительно отклоняется от траектории, по которой должно двигаться транспортное средство. Соответственно, даже в случае, когда не требуется быстро переместить транспортное средство по направлению к траектории, по которой должно двигаться транспортное средство, вследствие незначительного отклонения от траектории, по которой должно двигаться транспортное средство, соответствующая система автоматического управления транспортным средством управляет движением транспортного средства таким же образом, как и в случае, когда транспортное средство значительно отклоняется от траектории, по которой должно двигаться транспортное средство. Вследствие этого, в соответствующей системе автоматического управления транспортным средством плавность движения транспортного средства иногда ухудшается, в случае, когда транспортное средство незначительно отклоняется от траектории, по которой движется транспортное средство.
Сущность изобретения
Аспект изобретения обеспечивает систему автоматического управления транспортным средством, которая может быстро приблизить сведения о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства в плане движения в случае, когда сведения о состоянии транспортного средства значительно отклоняются от плана движения, а также может повысить плавность движения в случае, когда сведения о состоянии транспортного средства незначительно отклоняются от плана движения, посредством плавного приближения сведений о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства плана движения.
Система автоматического управления транспортным средством, согласно первому аспекту изобретения, включает в себя: блок (12) распознавания информации об окружающей обстановке, который распознает информацию об окружающей обстановке транспортного средства; блок (13) распознавания сведений о состоянии транспортного средства, который распознает сведения о состоянии транспортного средства; блок (14) генерирования плана движения, который генерирует план движения на основе информации об окружающей обстановке транспортного средства, а также генерирует контрольный диапазон целевого контрольного значения для транспортного средства в плане движения на основе, по меньшей мере, либо сведений о состоянии транспортного средства, либо информации об окружающей обстановке; первый вычислительный блок (15), который вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства становились целевыми сведениями о состоянии транспортного средства, соответствующими целевому контрольному значению, на основе плана движения, сведений о состоянии транспортного средства и контрольного диапазона; и привод (6), который управляет движением транспортного средства на основе командного контрольного значения.
В вышеупомянутом аспекте, в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону, первый вычислительный блок может вычислить командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства более плавно приближались к целевым сведениям о состоянии транспортного средства по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону.
В случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону, система автоматического управления транспортным средством более плавно приближает сведения о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону. То есть в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону, система автоматического управления транспортным средством более быстро приближает сведения о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону. Соответственно система автоматического управления транспортным средством может быстро приблизить сведения о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства в плане движения в случае, когда сведения о состоянии транспортного средства значительно отклоняются от плана движения, а также может повысить плавность движения в случае, когда сведения о состоянии транспортного средства незначительно отклоняются от плана движения, посредством плавного приближения сведений о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства плана движения.
В данном случае целевое контрольное значение для транспортного средства в плане движения, который генерируется посредством блока генерирования плана движения, может включать в себя комбинацию двух элементов, относящихся к данным временного ряда (целевой траектории) целевых местоположений и к целевым скоростям в соответствующих целевых местоположениях. Кроме того, целевое контрольное значение может включать в себя различную информацию, такую как, например, кривизна целевой траектории, целевые углы отклонения от курса транспортного средства в соответствующих целевых местоположениях и целевые ускорения (целевые скорости изменения ускорения/замедления) в соответствующих целевых местоположениях, в дополнение к целевым местоположениям транспортного средства и целевым скоростям транспортного средства.
Контрольный диапазон, который генерируется посредством блока генерирования плана движения, является диапазоном целевых контрольных значений, которые являются допустимыми в плане движения даже в том случае, когда сведения о состоянии транспортного средства отклоняются от целевых сведений о состоянии транспортного средства. Однако блок генерирования плана движения не должен генерировать контрольные диапазоны, соответствующие всем типам целевых контрольных значений в плане движения. Например, в случае, когда в качестве целевых контрольных значений задается целевое местоположение и целевая скорость, блок генерирования плана движения может сгенерировать контрольный диапазон только для целевого местоположения.
Сведения о состоянии транспортного средства, которые распознаются посредством блока распознавания сведений о состоянии транспортного средства, например, являются скоростью транспортного средства и скоростью отклонения от курса транспортного средства. В данном случае сведения о состоянии транспортного средства могут включать в себя различную информацию о транспортном средстве, такую как, например, габаритные размеры транспортного средства.
Блок генерирования плана движения может быть включен в первый ЭБУ, а первый вычислительный блок может быть включен во второй ЭБУ, который отличается от первого ЭБУ. В этом случае, например, можно рассматривать первый ЭБУ в качестве общего элемента, который используется для всех типов транспортных средств, а второй ЭБУ - в качестве элемента, зависящего от типа транспортного средства, который для каждого типа транспортного средства является отличным. Вследствие этого, можно поддерживать унифицированность элементов по сравнению со случаем, когда блок генерирования плана движения и первый вычислительный блок включаются в единый ЭБУ.
Система автоматического управления транспортным средством, согласно второму аспекту изобретения, включает в себя: блок (12) распознавания информации об окружающей обстановке, который распознает информацию об окружающей обстановке транспортного средства; блок (13) распознавания сведений о состоянии транспортного средства, который распознает сведения о состоянии транспортного средства; блок (14) генерирования плана движения, который генерирует план движения на основе информации об окружающей обстановке транспортного средства, а также генерирует контрольный диапазон целевого контрольного значения для транспортного средства в плане движения на основе, по меньшей мере, либо сведений о состоянии транспортного средства, либо информации об окружающей обстановке; второй вычислительный блок (15B), который вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства становились целевыми сведениями о состоянии транспортного средства, соответствующими целевому контрольному значению, на основе плана движения; привод (61), который управляет движением транспортного средства посредством выхода, соответствующего командному контрольному значению; и блок (62) управления приводом, который управляет параметром для привода (61) на основе сведений о состоянии транспортного средства и контрольного диапазона.
В случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону, блок управления приводом изменяет параметр таким образом, чтобы текущий выход привода более плавно приближался к выходу, соответствующему командному контрольному значению, по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону.
В случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону, система автоматического управления транспортным средством изменяет параметр таким образом, чтобы текущий выход привода более плавно приближался к выходу, соответствующему командному контрольному значению, по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону. То есть в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону, система автоматического управления транспортным средством изменяет параметр таким образом, чтобы текущий выход привода более быстро приближался к выходу, соответствующему командному контрольному значению, по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону. В результате система автоматического управления транспортным средством может быстро приблизить сведения о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства в плане движения в случае, когда сведения о состоянии транспортного средства значительно отклоняются от плана движения, а также может повысить плавность движения в случае, когда сведения о состоянии транспортного средства незначительно отклоняются от плана движения, посредством плавного приближения сведений о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства плана движения.
Блок генерирования плана движения может быть включен в первый ЭБУ, а второй вычислительный блок может быть включен во второй ЭБУ, который отличается от первого ЭБУ. В этом случае, например, можно рассматривать первый ЭБУ в качестве общего элемента, который используется для всех типов транспортных средств, а второй ЭБУ - в качестве элемента, зависящего от типа транспортного средства, который для каждого типа транспортного средства является отличным. Вследствие этого, можно поддерживать унифицированность элементов по сравнению со случаем, когда блок генерирования плана движения и второй вычислительный блок включаются в единый ЭБУ.
Согласно вышеупомянутым аспектам, можно быстро приблизить сведения о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства в плане движения в случае, когда сведения о состоянии транспортного средства значительно отклоняются от плана движения, а также повысить плавность движения в случае, когда сведения о состоянии транспортного средства незначительно отклоняются от плана движения, посредством плавного приближения сведений о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства плана движения.
Краткое описание чертежей
Далее, со ссылкой на прилагаемые чертежи, на которых одинаковые ссылочные позиции обозначают одинаковые элементы, будут описаны отличительные признаки, преимущества, а также техническая и промышленная значимость иллюстративных вариантов осуществления изобретения.
Фиг. 1 изображает блок-схему, демонстрирующую конфигурацию системы автоматического управления транспортным средством, согласно первому варианту осуществления;
Фиг. 2 изображает вид сверху для описания настройки плана движения и контрольного диапазона;
Фиг. 3 изображает вид сверху в случае, когда контрольный диапазон целевого местоположения смещается относительно целевого местоположения;
Фиг. 4А изображает график для описания настройки угла отклонения от курса и контрольного диапазона угла отклонения от курса;
Фиг. 4B изображает график для описания настройки скорости и контрольного диапазона скорости;
Фиг. 4C изображает график для описания настройки кривизны и контрольного диапазона кривизны;
Фиг. 4D изображает график для описания настройки ускорения и контрольного диапазона ускорения;
Фиг. 5А изображает график для описания настройки контрольного диапазона на основе ширины полосы движения;
Фиг. 5B изображает график для описания настройки контрольного диапазона на основе габаритных размеров соседнего транспортного средства;
Фиг. 5C изображает график для описания настройки контрольного диапазона на основе диапазона скорости соседнего транспортного средства;
Фиг. 5D изображает график для описания настройки контрольного диапазона на основе расстояния между соседним транспортным средством и целевой траекторией для транспортного средства;
Фиг. 6 изображает графическое представление алгоритма, демонстрирующее последовательность операций процесса генерирования плана движения и контрольного диапазона;
Фиг. 7 изображает графическое представление алгоритма, демонстрирующее последовательность операций процесса управления движением транспортного средства на основе плана движения и контрольного диапазона;
Фиг. 8 изображает блок-схему, демонстрирующую конфигурацию системы автоматического управления транспортным средством, согласно второму варианту осуществления;
Фиг. 9 изображает блок-схему, демонстрирующую конфигурацию системы автоматического управления транспортным средством, согласно третьему варианту осуществления;
Фиг. 10 изображает графическое представление алгоритма, демонстрирующее последовательность операций процесса управления приводом на основе командного контрольного значения и контрольного диапазона;
Фиг. 11 изображает блок-схему, демонстрирующую конфигурацию системы автоматического управления транспортным средством, согласно четвертому варианту осуществления; и
Фиг. 12 изображает вид сверху для описания изменения в местоположении транспортного средства в случае генерирования множества контрольных диапазонов.
Подробное описание вариантов осуществления изобретения
Далее в настоящем документе, со ссылкой на чертежи, будут подробно описаны варианты осуществления изобретения. В данном случае в нижеследующем описании идентичным или соответствующим элементам присваиваются идентичные ссылочные позиции, и их повторное описание опускается.
Первый вариант осуществления изобретения
Фиг. 1 изображает блок-схему, демонстрирующую конфигурацию системы 100 автоматического управления транспортным средством, согласно первому варианту осуществления. Как изображено на Фиг. 1, система 100 автоматического управления транспортным средством устанавливается в транспортное средство V, такое как, например, автомобиль. Система 100 автоматического управления транспортным средством включает в себя внешний датчик 1, приемный блок 2 GPS [Глобальная система определения местоположения], внутренний датчик 3, базу 4 картографических данных, навигационную систему 5, привод 6, ЭБУ [Электронный блок управления] 10 и интерфейс 7 HMI [Человеко-машинный интерфейс].
Внешний датчик 1 является аппаратурой обнаружения, предназначенной для обнаружения информации об окружающей обстановке транспортного средства V. Внешний датчик 1 включает в себя, по меньшей мере, либо камеру, либо радар, либо лидар [Лазерное обнаружение и измерение дальности].
Камера является визуализирующим устройством, предназначенным для визуализации окружающей обстановки транспортного средства V. Камера, например, обеспечивается на внутренней стороне транспортного средства V относительно ветрового стекла. Камера отправляет захваченную графическую информацию на ЭБУ 10. Камера может являться монокулярной камерой или стереоскопической камерой. Стереоскопическая камера включает в себя два визуализирующих блока, расположенных таким образом, чтобы воспроизводился бинокулярный параллакс. Графическая информация стереоскопической камеры также включает в себя информацию о направлении глубины.
Радар обнаруживает препятствие за пределами транспортного средства V с использованием радиоволны (например, миллиметровой волны). Радар обнаруживает препятствие посредством отправки радиоволны в окрестности транспортного средства V и посредством приема отраженной от препятствия радиоволны. Радар отправляет информацию об обнаруженном препятствии на ЭБУ 10.
Лидар обнаруживает препятствие за пределами транспортного средства V с использованием света. Лидар обнаруживает препятствие посредством отправки света в окрестности транспортного средства V и посредством приема отраженного от препятствия света для измерения расстояния до точки отражения. Лидар отправляет информацию об обнаруженном препятствии на ЭБУ 10. Система 100 автоматического управления транспортным средством должна включать в себя только, по меньшей мере, либо камеру, либо лидар, либо радар.
Приемный блок 2 GPS принимает сигналы от трех или более спутников GPS, и посредством этого определяет местоположение транспортного средства V (например, широту и долготу транспортного средства V). Приемный блок 2 GPS отправляет информацию об определенном местоположении транспортного средства V на ЭБУ 10. В данном случае вместо приемного блока 2 GPS могут быть использованы другие средства, которые могут идентифицировать широту и долготу транспортного средства V. Кроме того, предпочтительно иметь функцию определения ориентации транспортного средства V для установления соответствия между результатами определения датчиков и нижеописанной картографической информацией.
Внутренний датчик 3 является аппаратурой обнаружения, предназначенной для обнаружения сведений о состоянии движения транспортного средства V. Внутренний датчик 3 включает в себя датчик скорости, датчик ускорения и датчик скорости отклонения от курса. В данном случае внутренний датчик 3 не должен в обязательном порядке включать в себя датчик ускорения и датчик скорости отклонения от курса. Датчик скорости является детектором, предназначенным для обнаружения скорости транспортного средства V. В качестве датчика скорости, например, используется датчик скорости вращения колеса, который обеспечивается на колесе транспортного средства V, на приводном валу, вращающемся совместно с колесом, или подобном, и обнаруживает скорость вращения колеса. Датчик скорости отправляет информацию об обнаруженной скорости транспортного средства (информацию о скорости вращения колеса) на ЭБУ 10.
Датчик ускорения является детектором, предназначенным для обнаружения ускорения (скорости изменения ускорения/замедления) транспортного средства V. Датчик ускорения, например, включает в себя датчик продольного ускорения, предназначенный для обнаружения ускорения в продольном направлении транспортного средства V, и датчик поперечного ускорения, предназначенный для обнаружения поперечного ускорения транспортного средства V. Датчик ускорения отправляет информацию об ускорении транспортного средства V на ЭБУ 10. Датчик скорости отклонения от курса является детектором, предназначенным для обнаружения скорости отклонения от курса (угловой скорости вращения) вокруг вертикальной оси центра тяжести транспортного средства V. В качестве датчика скорости отклонения от курса, например, может быть использован гиродатчик. Датчик скорости отклонения от курса отправляет информацию об обнаруженной скорости отклонения от курса транспортного средства V на ЭБУ 10.
База 4 картографических данных является базой данных, содержащей картографическую информацию. База картографических данных, например, формируется на диске HDD [Жестком диске], который устанавливается на транспортном средстве. Картографическая информация, например, включает в себя информацию о местоположении дорог, информацию о форме дорог (например, информацию о типах кривых и прямых участков, информацию об изгибах или подобное), а также информацию о местоположении пересечений и перекрестков. Помимо всего прочего, предпочтительно, чтобы картографическая информация включала в себя информацию о местоположении преграждающих структур, таких как, например, здания и стены, а также включала в себя выходной сигнал внешнего датчика 1 для использования технологии SLAM (Одновременного определения местоположения и построения карты). В данном случае картографическая информация может быть сохранена на компьютере, который находится на предприятии, таком как, например, центр обработки информации, и может осуществлять связь с транспортным средством V.
Навигационная система 5 является устройством, предназначенным для указания водителю транспортного средства V маршрута к пункту назначения, заданному посредством водителя транспортного средства V. Навигационная система 5 вычисляет маршрут, по которому движется транспортное средство V, на основе информации о местоположении транспортного средства V, определенном посредством приемного блока 2 GPS, а также на основе картографической информации базы 4 картографических данных. В качестве маршрута, надлежащая полоса может быть задана в секции множества полос. Навигационная система 5, например, вычисляет целевой маршрут от местоположения транспортного средства V до пункта назначения, а также информирует водителя о целевом маршруте посредством индикации на дисплее или посредством речевого вывода из громкоговорителя. Навигационная система 5, например, отправляет информацию о целевом маршруте для транспортного средства V на ЭБУ 10. В данном случае навигационная система 5 может быть обеспечена на компьютере, который находится на предприятии, таком как, например, центр обработки информации, и может осуществлять связь с транспортным средством V.
Привод 6 является техническим средством, предназначенным для осуществления управления движением транспортного средства V. Привод 6 включает в себя, по меньшей мере, привод дроссельной заслонки, тормозной привод и привод системы рулевого управления. Привод дроссельной заслонки управляет интенсивностью подачи воздуха для двигателя (углом открытия дроссельной заслонки (выходом привода)) в ответ на командное контрольное значение (командный сигнал) от ЭБУ 10, а также управляет движущей силой транспортного средства V. В данном случае, если транспортное средство V является гибридным транспортным средством или электрическим транспортным средством, то привод дроссельной заслонки в состав не включается, при этом командное контрольное значение от ЭБУ 10 подается на двигатель, который является динамическим источником питания, для управления движущей силой (выходом привода).
Тормозной привод управляет тормозной системой в ответ на командное контрольное значение от ЭБУ 10, а также управляет тормозной силой (выходом привода), которая передается на колеса транспортного средства V. В качестве тормозной системы, например, может быть использована гидравлическая тормозная система. Привод системы рулевого управления управляет работой вспомогательного мотора, который является частью электрической системы рулевого управления, а также управляет усилием поворота (выходом привода) в ответ на командное контрольное значение от ЭБУ 10. В результате привод системы рулевого управления управляет усилием поворота транспортного средства V.
Интерфейс 7 HMI является интерфейсом, предназначенным для осуществления вывода и ввода информации между пассажиром (включая водителя) в транспортном средстве V и системой 100 автоматического управления транспортным средством. Интерфейс 7 HMI, например, включает в себя панель отображения, предназначенную для отображения графической информации пассажиру, громкоговоритель, предназначенный для речевого вывода, операционную кнопочную или сенсорную панель, посредством которой пассажир выполняет операцию ввода и т.п. Когда пассажир осуществляет операцию ввода, относящуюся к запуску или прекращению автоматического движения, интерфейс 7 HMI начинает или прекращает автоматическое движение посредством вывода сигнала на ЭБУ 10. Когда транспортное средство прибывает в пункт назначения, в котором автоматическое управление транспортным средством прекращается, интерфейс 7 HMI уведомляет пассажира о прибытии в пункт назначения. Интерфейс 7 HMI может вывести информацию пассажиру посредством использования подключенного беспроводным способом портативного информационного терминала, а также может принять операцию ввода от пассажира посредством использования портативного информационного терминала.
Как изображено на Фиг. 1, ЭБУ 10 управляет автоматическим движением транспортного средства V. ЭБУ 10 является электронным блоком управления, включающим в себя процессор CPU [Центральный процессор], память ROM [Постоянную память], память RAM [Оперативную память] и т.п. В ЭБУ 10 программа, сохраненная в памяти ROM, загружается в память RAM и выполняется посредством процессора CPU, и посредством этого осуществляется управление различных типов. ЭБУ 10 может быть сконфигурирован посредством множества электронных блоков управления.
ЭБУ 10, функционально, включает в себя блок 12 распознавания информации об окружающей обстановке, блок 13 распознавания сведений о состоянии транспортного средства, блок 14 генерирования плана движения и блок 15 управления движением (первый вычислительный блок).
Блок 12 распознавания информации об окружающей обстановке распознает информацию об окружающей обстановке транспортного средства V на основе результата обнаружения внешнего датчика 1 (например, графической информации камеры, информации о препятствии радара, информации о препятствии лидара и т.п.) и т.п. Информация об окружающей обстановке, например, включает в себя местоположение белой линии или местоположение центра полосы движения относительно транспортного средства V, ширину полосы движения, форму дороги (например, кривизну полосы движения, изменение уклона поверхности дорожного полотна, которое является полезным по оценке видимости внешнего датчика 1, поворот и т.п.), и местоположение препятствия (например, соседнего транспортного средства или подобного) в окрестностях транспортного средства V (например, информацию для установления различий между неподвижным препятствием и движущимся препятствием, местоположение препятствия относительно транспортного средства V, скорость препятствия, направление движения препятствия относительно транспортного средства V, относительную скорость препятствия относительно транспортного средства V, габаритные размеры препятствия и т.п.). Кроме того, предпочтительно увеличить точность определения местоположения и направления транспортного средства V, полученных посредством приемного блока 2 GPS или подобного, посредством установления соответствия между результатом обнаружения внешнего датчика 1 и картографической информацией.
Информация об окружающей обстановке дополнительно включает в себя информацию о типе дороги. Информация о типе дороги, например, включает в себя информацию о том, какой является дорога, по которой движется транспортное средство V, а именно, автомагистралью или обычной дорогой. Например, информация о том, какой является дорога, а именно, автомагистралью или обычной дорогой, может быть включена в картографическую информацию, содержащуюся в базе 4 картографических данных. В этом случае блок 12 распознавания информации об окружающей обстановке может распознать, где находится полоса движения, а именно, на автомагистрали или на обычной дороге, на основе картографической информации, содержащейся в базе 4 картографических данных, а также на основе местоположения транспортного средства V, распознанного посредством блока 13 распознавания сведений о состоянии транспортного средства.
Информация об окружающей обстановке дополнительно включает в себя расстояние между соседним транспортным средством, которое движется в окрестностях транспортного средства V, и целевой траекторией для транспортного средства V. Блок 12 распознавания информации об окружающей обстановке может распознать расстояние между соседним транспортным средством и целевой траекторией для транспортного средства V, например, на основе информации об окружающей обстановке, обнаруженной посредством внешнего датчика 1, а также на основе целевой траектории для транспортного средства V, сгенерированной посредством блока 14 генерирования плана движения. В частности, например, в случае, когда внешний датчик 1 включает в себя радар, блок 12 распознавания информации об окружающей обстановке распознает местоположение соседнего транспортного средства на основе результата обнаружения радара. Блок 12 распознавания информации об окружающей обстановке может распознать расстояние между соседним транспортным средством и целевой траекторией для транспортного средства V на основе целевой траектории для транспортного средства V, сгенерированной посредством блока 14 генерирования плана движения, а также на основе распознанного местоположения соседнего транспортного средства.
Информация об окружающей обстановке дополнительно включает в себя цвет и тип пограничной линии полосы движения, которая находится по правой стороне от транспортного средства V. Например, цвет и тип пограничной линии на правой стороне полосы движения могут быть включены в картографическую информацию, содержащуюся в базе 4 картографических данных. В этом случае блок 12 распознавания информации об окружающей обстановке может распознать цвет и тип пограничной линии на правой стороне полосы движения на основе картографической информации, содержащейся в базе 4 картографических данных, а также на основе местоположения транспортного средства V, распознанного посредством блока 13 распознавания сведений о состоянии транспортного средства. В качестве альтернативы, например, в случае, когда внешний датчик 1 включает в себя камеру, блок 12 распознавания информации об окружающей обстановке может распознать цвет и тип пограничной линии по правой стороне от движущегося транспортного средства на основе графической информации камеры.
Информации об окружающей обстановке дополнительно включает в себя размер плоской области за пределами полосы движения для транспортного средства V. Плоская область за пределами дороги является плоской областью, которая непрерывно соединяется с полосой движения через пограничную линию полосы движения. Например, в случае, когда внешний датчик 1 включает в себя стереоскопическую камеру, блок 12 распознавания информации об окружающей обстановке может распознать размер плоской области посредством выполнения обработки изображений на основе графической информации стереоскопической камеры.
Информация об окружающей обстановке дополнительно включает в себя сведения о состоянии поверхности дорожного полотна дороги для транспортного средства V. Сведения о состоянии поверхности дорожного полотна включают в себя информацию о том, какой является поверхность дорожного полотна, а именно сухой или влажной. Например, в случае, когда внешний датчик 1 включает в себя камеру, блок 12 распознавания информации об окружающей обстановке может распознать, какой является поверхность дорожного полотна, а именно сухой или влажной, посредством выполнения обработки изображения на основе графической информации камеры.
Блок 13 распознавания сведений о состоянии транспортного средства распознает сведения о состоянии транспортного средства V. Сведения о состоянии транспортного средства могут включать в себя местоположение транспортного средства V (далее в настоящем документе будет называться "местоположением транспортного средства"), сведения о состоянии движения транспортного средства V и характеристическую информацию транспортного средства V.
Блок 13 распознавания сведений о состоянии транспортного средства распознает местоположение транспортного средства на карте на основе информации о местоположении транспортного средства V, принятой посредством приемного блока 2 GPS, а также на основе картографической информации базы 4 картографических данных. В данном случае блок 13 распознавания сведений о состоянии транспортного средства может выполнить распознавание посредством получения, от навигационной системы 5, местоположения транспортного средства, которое используется в навигационной системе 5. В случае, когда местоположение транспортного средства V может быть определено посредством датчика, размещенного с наружной стороны, например, на дороге, блок 13 распознавания сведений о состоянии транспортного средства может получить местоположение транспортного средства от датчика посредством связи.
Блок 13 распознавания сведений о состоянии транспортного средства распознает сведения о состоянии движения транспортного средства V на основе результата обнаружения внутреннего датчика 3 (например, информации о скорости транспортного средства датчика скорости, информации об ускорении датчика ускорения, информации о скорости отклонения от курса датчика скорости отклонения от курса и т.п.). Сведения о состоянии движения транспортного средства V, например, включают в себя скорость, ускорение и скорость отклонения от курса транспортного средства V.
Блок 13 распознавания сведений о состоянии транспортного средства, например, может распознать габаритные размеры транспортного средства V и достоверность датчика в качестве характеристической информации. Габаритные размеры транспортного средства V могут являться габаритными размерами в продольном направлении транспортного средства V, или могут являться габаритными размерами в направлении ширины транспортного средства V. В качестве альтернативы, габаритные размеры транспортного средства V могут включать в себя как габаритные размеры в продольном направлении транспортного средства V, так и габаритные размеры в направлении ширины транспортного средства V. Габаритные размеры транспортного средства V могут быть заблаговременно сохранены в запоминающем блоке, соединенном с ЭБУ 10, или подобном. Блок 13 распознавания сведений о состоянии транспортного средства может распознать габаритные размеры транспортного средства V посредством считывания габаритных размеров транспортного средства V, сохраненных в запоминающем блоке или подобном.
Достоверность датчика, например, может являться достоверностью результата обнаружения каждого датчика, включенного во внешний датчик 1 и внутренний датчик 3. Достоверность для каждого датчика может быть заблаговременно сохранена в запоминающем блоке, соединенном с ЭБУ 10, или подобном. Блок 13 распознавания сведений о состоянии транспортного средства может распознать достоверность результата обнаружения датчика посредством считывания достоверности, сохраненной в запоминающем блоке, соединенном с ЭБУ 10, или подобном. В качестве альтернативы, в случае, когда во внешний датчик 1 и внутренний датчик 3 включены два датчика, способных обнаруживать один и тот же объект, блок 13 распознавания сведений о состоянии транспортного средства может сравнить результаты обнаружения двух датчиков, а также может распознать достоверности результатов обнаружения датчиков на основе результата сравнения. Например, блок 13 распознавания сведений о состоянии транспортного средства может распознать, что достоверности результатов обнаружения датчиков являются высокими в случае, когда результаты обнаружения двух датчиков являются идентичными, а также может распознать, что достоверности результатов обнаружения датчиков являются низкими в случае, когда результаты обнаружения двух датчиков являются различными. В частности, например, в случае, когда результат распознавания для препятствия на основе графической информации камеры совпадает с результатом распознавания для препятствия на основе информации о препятствии радара, блок 13 распознавания сведений о состоянии транспортного средства может распознать, что достоверность результата обнаружения камеры и достоверность результата обнаружения радара являются высокими. С другой стороны, в случае, когда результат распознавания для препятствия на основе графической информации камеры не совпадает с результатом распознавания для препятствия на основе информации о препятствии радара, блок 13 распознавания сведений о состоянии транспортного средства может распознать, что достоверность результата обнаружения камеры и достоверность результата обнаружения радара являются низкими.
Блок 14 генерирования плана движения генерирует целевую траекторию для транспортного средства V, например, на основе целевого маршрута, вычисленного посредством навигационной системы 5, а также на основе информации об окружающей обстановке (включающей в себя местоположение и ориентацию соседнего транспортного средства) транспортного средства V, распознанной посредством блока 12 распознавания информации об окружающей обстановке. Целевая траектория является траекторией транспортного средства V, которая проходит по целевому маршруту. Блок 14 генерирования плана движения генерирует целевую траекторию таким образом, чтобы транспортное средство V двигалось надлежащим образом по целевому маршруту в соответствии с критериями безопасности, правилами дорожного движения, эффективностью движения и т.п. Безусловно, в данной ситуации, блок 14 генерирования плана движения генерирует целевую траекторию для транспортного средства V таким образом, чтобы предотвратить контакт с препятствием, на основе местоположения препятствия в окрестностях транспортного средства V.
Целевой маршрут в данном случае также включает в себя маршрут движения, который автоматически генерируется на основе информации об окружающей обстановке и картографической информации, когда настройка пункта назначения не выполняется явным образом посредством водителя, как иллюстративно представлено посредством маршрута движения по дороге в "устройстве помощи при вождении", описанном в патенте Японии № 5382218 (WO 2011/158347), или в "устройстве автоматизированного вождения", описанном в публикации заявки на патент Японии № 2011-162132.
Блок 14 генерирования плана движения генерирует план движения, соответствующий сгенерированной целевой траектории. То есть блок 14 генерирования плана движения генерирует план движения в соответствии с заблаговременно заданным целевым маршрутом на основе информации об окружающей обстановке транспортного средства V и картографической информации базы 4 картографических данных. В данном случае блок 14 генерирования плана движения может генерировать план движения без использования картографической информации базы 4 картографических данных. Например, блок 14 генерирования плана движения принимает решение в отношении целевой траектории на основе информации об окружающей обстановке транспортного средства V, а также генерирует план движения, соответствующий выбранной целевой траектории. План движения включает в себя целевое контрольное значение, которое является целью для управления сведениями о состоянии транспортного средства V. Предпочтительно, чтобы блок 14 генерирования плана движения генерировал, в качестве целевого контрольного значения в плане движения, множество комбинаций, каждая из которых имеет два элемента, относящиеся к целевому местоположению p в системе координат, закрепленному за транспортным средством V, и к целевой скорости v в целевом местоположении, то есть множество конфигурационных координат (p, v). В данном случае каждое целевое местоположение p имеет, по меньшей мере, местоположение с координатой x и местоположение с координатой y в системе координат, закрепленные за транспортным средством V, или эквивалентную им информацию. Целевое контрольное значение в плане движения не ограничивается значением, продемонстрированным посредством вышеописанных конфигурационных координат. Например, в плане движения вместо целевой скорости v вышеописанных конфигурационных координат (p, v) в качестве целевого контрольного значения может быть использовано целевое время t. Кроме того, в случае, когда вместо целевой скорости v вышеописанных конфигурационных координат (p, v) используется целевое время t, целевое контрольное значение может дополнительно включать в себя ориентацию транспортного средства V в целевое время t.
В дополнение к множеству целевых местоположений, через которые транспортное средство V должно пройти по целевой траектории, и целевым скоростям в соответствующих целевых местоположениях, план движения может включать в себя, в качестве целевого контрольного значения, по меньшей мере, либо кривизну целевой траектории для транспортного средства V в соответствующих целевых местоположениях, либо целевые углы отклонения от курса транспортного средства V в соответствующих целевых местоположениях, либо целевые ускорения транспортного средства V в соответствующих целевых местоположениях.
Кроме того, как правило, упрежденные данные за несколько секунд относительно текущего времени являются вполне достаточными для плана движения. Однако, в зависимости от ситуаций, таких как, например, поворот направо на перекрестке и обгон транспортного средства V, требуются данные за несколько десятков секунд. Вследствие этого, предпочтительно, чтобы количество конфигурационных координат в плане движения поддавалось изменению, и чтобы расстояние между конфигурационными координатами также поддавалось изменению. Помимо всего прочего, кривая, соединяющая конфигурационные координаты, может быть приближена посредством сплайн-функции или подобного, при этом параметры кривой могут рассматриваться в качестве плана движения. Для генерирования плана движения может быть использован произвольный известный способ, если он позволяет прогнозировать поведение транспортного средства V.
План движения может являться данными, демонстрирующими переходы целевой скорости, целевой скорости изменения ускорения/замедления, целевого усилия поворота и прочего, транспортного средства V, когда транспортное средство V движется по целевой траектории вдоль целевого маршрута. План движения может включать в себя шаблон целевой скорости, шаблон целевой скорости изменения ускорения/замедления и шаблон целевого усилия поворота транспортного средства V. Блок 14 генерирования плана движения в данном случае может генерировать план движения таким образом, чтобы минимизировать время в пути (время, необходимое для того, чтобы транспортное средство V прибыло в пункт назначения).
В частности, шаблон целевой скорости, например, является данными о целевой скорости транспортного средства, которые задаются в сочетании со временем для каждого целевого контрольного местоположения, относительно целевых контрольных местоположений, заданных на целевой траектории с предварительно определенным интервалом (например, 1 м). Шаблон целевой скорости изменения ускорения/замедления, например, является данными о целевой скорости изменения ускорения/замедления, которые задаются в сочетании со временем для каждого целевого контрольного местоположения, относительно целевых контрольных местоположений, заданных на целевой траектории с предварительно определенным интервалом (например, 1 м). Шаблон целевого усилия поворота, например, является данными о целевом усилии поворота, которые задаются в сочетании со временем для каждого целевого контрольного местоположения, относительно целевых контрольных местоположений, заданных на целевой траектории с предварительно определенным интервалом (например, 1 м).
В дополнение к плану движения, например, блок 14 генерирования плана движения дополнительно генерирует контрольный диапазон целевого контрольного значения для транспортного средства V в плане движения. Блок 14 генерирования плана движения генерирует контрольный диапазон на основе информации об окружающей обстановке транспортного средства V, распознанной посредством блока 12 распознавания информации об окружающей обстановке, а также на основе сведений о состоянии транспортного средства, распознанных посредством блока 13 распознавания сведений о состоянии транспортного средства. Контрольный диапазон задается для каждого целевого контрольного значения в плане движения. Однако блок 14 генерирования плана движения не должен генерировать контрольные диапазоны, соответствующие всем типам целевых контрольных значений в плане движения. Например, в случае, когда в качестве целевого контрольного значения задается целевое местоположение и целевая скорость, блок 14 генерирования плана движения может сгенерировать контрольный диапазон только для целевого местоположения.
Кроме того, контрольный диапазон имеет такой же размер (блок), как и целевое контрольное значение для транспортного средства в плане движения. То есть, например, в случае, когда целевое местоположение включается в качестве целевого контрольного значения, контрольный диапазон целевого местоположения является диапазоном местоположения. Например, в случае, когда целевая скорость включается в качестве целевого контрольного значения, контрольный диапазон целевой скорости является диапазоном скорости. Например, в случае, когда кривизна целевой траектории включается в качестве целевого контрольного значения, контрольный диапазон кривизны целевой траектории является диапазоном кривизны. Например, в случае, когда целевой угол отклонения от курса транспортного средства V включается в качестве целевого контрольного значения, контрольный диапазон целевого угла отклонения от курса является диапазоном угла. Например, в случае, когда целевое ускорение включается в качестве целевого контрольного значения, контрольный диапазон целевого ускорения является диапазоном ускорения. Например, в случае, когда целевое время включается в качестве целевого контрольного значения, контрольный диапазон целевого времени является диапазоном времени.
Контрольный диапазон, который генерируется посредством блока 14 генерирования плана движения, является диапазоном целевых контрольных значений, которые являются допустимыми в плане движения даже в том случае, когда сведения о состоянии транспортного средства отклоняются от целевых сведений о состоянии транспортного средства. Например, блок 14 генерирования плана движения может генерировать контрольный диапазон с учетом плавности движения, степени безопасности и прочего, транспортного средства. Генерирование контрольного диапазона с учетом плавности движения транспортного средства, например, может являться генерированием диапазона целевых контрольных значений, которые позволяют транспортному средству V двигаться таким образом, чтобы поперечное ускорение, которое генерируется для транспортного средства V, становилось равным предварительно выбранному опорному значению или меньшим. Генерирование контрольного диапазона с учетом степени безопасности транспортного средства может являться генерированием диапазона целевых контрольных значений, которые позволяют транспортному средству V двигаться таким образом, чтобы расстоянием между транспортным средством V и транспортным средством в окрестностях транспортного средства V становилось равным предварительно выбранному опорному значению или превышало его.
Далее будет описан конкретный пример плана движения и контрольного диапазона. Фиг. 2 изображает вид сверху для описания настройки целевого местоположения и контрольного диапазона целевого местоположения в случае, когда целевое местоположение включается в план движения в качестве целевого контрольного значения. Ссылочная позиция R, изображенная на Фиг. 2, обозначает полосу движения, по которой движется транспортное средство V. Ссылочные позиции L1, L2, изображенные посредством сплошных линий, обозначают белые линии, которые являются границами между полосой R движения и соседними полосами или подобным. Ссылочная позиция T, изображенная посредством штриховой линии, обозначает целевую траекторию, которая соединяет множество целевых местоположений в плане движения. Ссылочная позиция W обозначает контрольный диапазон целевого местоположения. Контрольный диапазон W может быть изображен в качестве длины между пограничной линией Wa контрольного диапазона и пограничной линией Wb контрольного диапазона, перпендикулярной целевой траектории T, которая соединяет целевые местоположения. Пограничная линия Wa контрольного диапазона является кривой, которая соединяет максимальные значения по левой стороне от транспортного средства V в контрольных диапазонах, сгенерированных для соответствующих целевых местоположений. Пограничная линия Wb контрольного диапазона является кривой, которая соединяет максимальные значения по правой стороне от транспортного средства V в контрольных диапазонах, сгенерированных для соответствующих целевых местоположений. В качестве примера Фиг. 2 изображает случай, когда контрольный диапазон задается посредством ширины нижеописанной полосы движения, и, в результате, изображает случай, когда контрольный диапазон W является постоянным.
Фиг. 2 изображает случай, когда центр контрольного диапазона W целевых местоположений является целевой траекторией T, которая соединяет целевые местоположения. В то же время, блок 14 генерирования плана движения может сгенерировать контрольный диапазон W таким образом, чтобы контрольный диапазон W смещался в правую сторону или в левую сторону от транспортного средства V относительно целевой траектории T, которая соединяет целевые местоположения. Например, как изображено на Фиг. 3, в случае наличия бокового разделителя S с левой стороны полосы R движения, блок 14 генерирования плана движения может сгенерировать контрольный диапазон W таким образом, чтобы контрольный диапазон W смещался в сторону дальше от бокового разделителя S. Соответственно блок 14 генерирования плана движения может сгенерировать контрольный диапазон таким образом, чтобы контрольный диапазон смещался относительно целевого местоположения, например, в зависимости от местоположения препятствия, такого как, например, боковой разделитель S, распознанного посредством блока 12 распознавания информации об окружающей обстановке. Контрольный диапазон, сгенерированный посредством блока 14 генерирования плана движения таким образом, чтобы он смещался, не ограничивается контрольным диапазоном целевого местоположения, при этом контрольные диапазоны других целевых контрольных значений также могут быть сгенерированы таким образом, чтобы они смещались относительно целевых контрольных значений. В качестве способа смещения контрольного диапазона, например, блок 14 генерирования плана движения может сместить контрольный диапазон относительно целевого контрольного значения таким образом, чтобы контрольный диапазон удалялся от препятствия.
Фиг. 4А изображает график для описания настройки целевого угла отклонения от курса и контрольного диапазона целевого угла отклонения от курса в случае, когда целевой угол отклонения от курса включается в план движения в качестве целевого контрольного значения. Фиг. 4А изображает пример временного изменения целевого угла отклонения от курса целевого контрольного значения, а также пример временного изменения контрольного диапазона целевого угла отклонения от курса. Ссылочная позиция T1, изображенная посредством штриховой линии, обозначает временное изменение целевого угла отклонения от курса целевого контрольного значения в направлении по часовой стрелке или против часовой стрелки. Ссылочная позиция Wa1, изображенная посредством пунктирной линии, обозначает пограничную линию контрольного диапазона, изображающую верхний предел контрольного диапазона целевого угла отклонения от курса в направлении по часовой стрелке или против часовой стрелки. Ссылочная позиция Wb1, изображенная посредством пунктирной линии, обозначает пограничную линию контрольного диапазона, изображающую нижний предел контрольного диапазона целевого угла отклонения от курса в направлении по часовой стрелке или против часовой стрелки. Ссылочная позиция W1 обозначает контрольный диапазон целевого угла отклонения от курса. Контрольный диапазон W1 может быть изображен в качестве угла, изменяющегося от пограничной линии Wa1 контрольного диапазона, которая является верхним пределом контрольного диапазона, до пограничной линии Wb1 контрольного диапазона, которая является нижним пределом контрольного диапазона. Блок 14 генерирования плана движения может сгенерировать контрольный диапазон W1 целевого угла отклонения от курса таким образом, чтобы контрольный диапазон W1 смещался относительно целевого угла Т1 отклонения от курса.
Фиг. 4B изображает график для описания настройки целевой скорости и контрольного диапазона целевой скорости в случае, когда целевая скорость включается в план движения в качестве целевого контрольного значения. Фиг. 4B изображает пример временного изменения целевой скорости целевого контрольного значения, а также пример временного изменения контрольного диапазона целевой скорости. Ссылочная позиция T2, изображенная посредством штриховой линии, обозначает временное изменение целевой скорости целевого контрольного значения. Ссылочная позиция Wa2, изображенная посредством пунктирной линии, обозначает пограничную линию контрольного диапазона, изображающую верхний предел контрольного диапазона целевой скорости. Ссылочная позиция Wb2, изображенная посредством пунктирной линии, обозначает пограничную линию контрольного диапазона, изображающую нижний предел контрольного диапазона целевой скорости. Ссылочная позиция W2 обозначает контрольный диапазон целевой скорости. Контрольный диапазон W2 может быть изображен посредством скорости, изменяющейся от пограничной линии Wa2 контрольного диапазона, которая является верхним пределом контрольного диапазона, до пограничной линии Wb2 контрольного диапазона, которая является нижним пределом контрольного диапазона. Блок 14 генерирования плана движения может сгенерировать контрольный диапазон W2 целевой скорости таким образом, чтобы контрольный диапазон W2 смещался относительно целевой скорости T2.
Фиг. 4C изображает график для описания настройки кривизны целевой траектории и контрольного диапазона кривизны в случае, когда кривизна целевой траектории включается в план движения в качестве целевого контрольного значения. Фиг. 4C изображает пример временного изменения кривизны целевой траектории, а также пример временного изменения контрольного диапазона кривизны. Ссылочная позиция T3, изображенная посредством штриховой линии, обозначает временное изменение кривизны целевой траектории. Ссылочная позиция Wa3, изображенная посредством пунктирной линии, обозначает пограничную линию контрольного диапазона, изображающую верхний предел контрольного диапазона кривизны. Ссылочная позиция Wb3, изображенная посредством пунктирной линии, обозначает пограничную линию контрольного диапазона, изображающую нижний предел контрольного диапазона кривизны. Ссылочная позиция W3 обозначает контрольный диапазон кривизны. Контрольный диапазон W3 может быть изображен в качестве кривизны, изменяющейся от пограничной линии Wa3 контрольного диапазона, которая является верхним пределом контрольного диапазона, до пограничной линии Wb3 контрольного диапазона, которая является нижним пределом контрольного диапазона. Блок 14 генерирования плана движения может сгенерировать контрольный диапазон W3 кривизны таким образом, чтобы контрольный диапазон W3 смещался относительно кривизны T3 целевой траектории.
Фиг. 4D изображает график для описания настройки целевого ускорения и контрольного диапазона целевого ускорения в случае, когда целевое ускорение включается в план движения в качестве целевого контрольного значения. Фиг. 4D изображает пример временного изменения целевого ускорения целевого контрольного значения, а также пример временного изменения контрольного диапазона целевого ускорения. Ссылочная позиция T4, изображенная посредством штриховой линии, обозначают временное изменение целевого ускорения целевого контрольного значения. Ссылочная позиция Wa4, изображенная посредством пунктирной линии, обозначает пограничную линию контрольного диапазона, изображающую верхний предел контрольного диапазона целевого ускорения. Ссылочная позиция Wb4, изображенная посредством пунктирной линии, обозначает пограничную линию контрольного диапазона, изображающую нижний предел контрольного диапазона целевого ускорения. Ссылочная позиция W4 обозначает контрольный диапазон целевого ускорения. Контрольный диапазон W4 может быть изображен посредством ускорения, изменяющегося от пограничной линии Wa4 контрольного диапазона, которая является верхним пределом контрольного диапазона, до пограничной линии Wb4 контрольного диапазона, которая является нижним пределом контрольного диапазона. Блок 14 генерирования плана движения может сгенерировать контрольный диапазон W4 целевого ускорения таким образом, чтобы контрольный диапазон W4 смещался относительно целевого ускорения T4.
Далее будет описан пример настройки контрольного диапазона, который генерируется посредством блока 14 генерирования плана движения. Блок 14 генерирования плана движения может сгенерировать контрольный диапазон, например, на основе ширины полосы движения для транспортного средства V, которая является информацией об окружающей обстановке. В данной ситуации, как изображено на Фиг. 5А, в случае, когда ширина полосы движения является большой, блок 14 генерирования плана движения может увеличить контрольный диапазон по сравнению со случаем, когда ширина полосы движения является малой. Блок 14 генерирования плана движения может распознать ширину полосы движения, например, посредством получения данных от блока 12 распознавания информации об окружающей обстановке.
Блок 14 генерирования плана движения может сгенерировать контрольный диапазон, например, на основе габаритных размеров соседнего транспортного средства, которое движется в окрестностях транспортного средства V, которые являются информацией об окружающей обстановке. Соседнее транспортное средство, например, может являться транспортным средством, которое движется впереди транспортного средства V и которое движется по полосе движения для транспортного средства V или движется по соседней полосе, находящейся рядом с полосой движения для транспортного средства V. Габаритные размеры соседнего транспортного средства могут являться габаритными размерами в направлении ширины транспортного средства или габаритными размерами в продольном направлении. В данной ситуации, как изображено на Фиг. 5B, в случае, когда габаритные размеры соседнего транспортного средства являются большими, блок 14 генерирования плана движения может уменьшить контрольный диапазон по сравнению со случаем, когда габаритные размеры соседнего транспортного средства являются малыми. Блок 14 генерирования плана движения может распознать габаритные размеры соседнего транспортного средства, например, посредством получения данных от блока 12 распознавания информации об окружающей обстановке.
Блок 14 генерирования плана движения может сгенерировать контрольный диапазон, например, на основе скорости соседнего транспортного средства, которое движется в окрестностях транспортного средства V, которая является информацией об окружающей обстановке. В данной ситуации, как изображено на Фиг. 5C, в случае, когда скорость соседнего транспортного средства является большой, блок 14 генерирования плана движения может уменьшить контрольный диапазон по сравнению со случаем, когда скорость соседнего транспортного средства является малой. Блок 14 генерирования плана движения может распознать скорость соседнего транспортного средства, например, посредством получения данных от блока 12 распознавания информации об окружающей обстановке.
Блок 14 генерирования плана движения может сгенерировать контрольный диапазон, например, на основе расстояния между соседним транспортным средством, которое движется в окрестностях транспортного средства V, а также на основе целевой траектории для транспортного средства V, которые являются информацией об окружающей обстановке. В данной ситуации, как изображено на Фиг. 5D, в случае, когда расстояние между соседним транспортным средством и целевой траекторией для транспортного средства V является большим, блок 14 генерирования плана движения может увеличить контрольный диапазон по сравнению со случаем, когда расстояние между соседним транспортным средством и целевой траекторией для транспортного средства V является малым. Блок 14 генерирования плана движения может распознать расстояние между соседним транспортным средством и целевой траекторией для транспортного средства V, например, посредством получения данных от блока 12 распознавания информации об окружающей обстановке.
Блок 14 генерирования плана движения может сгенерировать контрольный диапазон, например, на основе габаритных размеров транспортного средства V, которые являются характеристической информацией транспортного средства V, включенной в информацию о транспортном средстве. Габаритные размеры транспортного средства V могут являться габаритными размерами в направлении ширины транспортного средства или габаритными размерами в продольном направлении. В данной ситуации, в случае, когда габаритные размеры транспортного средства V являются большими, блок 14 генерирования плана движения может уменьшить контрольный диапазон по сравнению со случаем, когда габаритные размеры транспортного средства V являются малыми. Блок 14 генерирования плана движения может распознать габаритные размеры транспортного средства V, например, посредством получения данных от блока 13 распознавания сведений о состоянии транспортного средства.
Блок 14 генерирования плана движения может сгенерировать контрольный диапазон, например, на основе информации о типе дороги полосы движения для транспортного средства V, которая является информацией об окружающей обстановке. В данной ситуации, в случае, когда полоса движения находится на автомагистрали, блок 14 генерирования плана движения может увеличить контрольный диапазон по сравнению со случаем, когда полоса движения находится на обычной дороге. Блок 14 генерирования плана движения может распознать информацию о типе дороги, например, посредством получения данных от блока 12 распознавания информации об окружающей обстановке. Блок 14 генерирования плана движения может сгенерировать контрольный диапазон, например, на основе ограничения скорости полосы движения для транспортного средства V, которое является информацией об окружающей обстановке. В данной ситуации, в случае, когда ограничение скорости является большим, блок 14 генерирования плана движения может уменьшить контрольный диапазон по сравнению со случаем, когда ограничение скорости является малым. В данном случае, например, ограничение скорости может быть включено в картографическую информацию, содержащуюся в базе 4 картографических данных. В данной ситуации блок 12 распознавания информации об окружающей обстановке получает ограничение скорости, в качестве информации об окружающей обстановке, от базы 4 картографических данных. Затем блок 14 генерирования плана движения может распознать ограничение скорости, в качестве информации об окружающей обстановке, посредством получения данных от блока 12 распознавания информации об окружающей обстановке.
Блок 14 генерирования плана движения может сгенерировать контрольный диапазон, например, на основе сведений о состоянии движения, включенных в сведения о состоянии транспортного средства V. В данной ситуации, в случае, когда скорость транспортного средства V, которое находится в движении, является большой, блок 14 генерирования плана движения может уменьшить контрольный диапазон по сравнению со случаем, когда скорость транспортного средства V является малой. Блок 14 генерирования плана движения может распознать скорость транспортного средства V, например, посредством получения данных от блока 13 распознавания сведений о состоянии транспортного средства. В случае, когда скорость отклонения от курса транспортного средства V, которое находится в движении, является большой, блок 14 генерирования плана движения может уменьшить контрольный диапазон по сравнению со случаем, когда скорость отклонения от курса транспортного средства V является малой. В данной ситуации блок 14 генерирования плана движения может распознать скорость отклонения от курса, например, посредством получения данных от блока 13 распознавания сведений о состоянии транспортного средства. В случае, когда продольное или поперечное ускорение транспортного средства V, которое находится в движении, является большим, блок 14 генерирования плана движения может уменьшить контрольный диапазон по сравнению со случаем, когда продольное или поперечное ускорение транспортного средства V является малым. В данной ситуации блок 14 генерирования плана движения может распознать продольное или поперечное ускорение, например, посредством получения данных от блока 13 распознавания сведений о состоянии транспортного средства.
Блок 14 генерирования плана движения может сгенерировать контрольный диапазон, например, на основе скорости, с которой соседнее транспортное средство приближается к транспортному средству V (скорости препятствия относительно транспортного средства V), которая является информацией об окружающей обстановке. В данной ситуации, в случае, когда скорость, с которой соседнее транспортное средство приближается к транспортному средству V, является большой, блок 14 генерирования плана движения может уменьшить контрольный диапазон по сравнению со случаем, когда скорость, с которой соседнее транспортное средство приближается к транспортному средству V, является малой. Блок 14 генерирования плана движения может распознать скорость, с которой соседнее транспортное средство приближается к транспортному средству V, посредством получения данных от блока 12 распознавания информации об окружающей обстановке.
Блок 14 генерирования плана движения может сгенерировать контрольный диапазон, например, на основе цвета и типа пограничной линии полосы движения, которая находится по правой стороне от транспортного средства V, которые являются информацией об окружающей обстановке. Например, если транспортное средство V движется в Японии, то в случае, когда цвет пограничной линии на правой стороне полосы движения является желтым, блок 14 генерирования плана движения может уменьшить контрольный диапазон по сравнению со случаем, когда пограничная линия на правой стороне полосы движения является штриховой белой линией. Например, в случае, когда цвет пограничной линии на правой стороне полосы движения является желтым, необходимо, чтобы транспортное средство V двигалось таким образом, чтобы транспортное средство V не заезжало на пограничную линию вследствие запрета движения по пограничной линии. Поэтому, в случае, когда цвет пограничной линии на правой стороне полосы движения является желтым, блок 14 генерирования плана движения уменьшает контрольный диапазон по сравнению со случаем, когда пограничная линия на правой стороне полосы движения является штриховой белой линией. Блок 14 генерирования плана движения может распознать цвет и тип пограничной линии полосы движения, которая находится по правой стороне от транспортного средства V, посредством получения данных от блока 12 распознавания информации об окружающей обстановке.
Блок 14 генерирования плана движения может сгенерировать контрольный диапазон, например, на основе достоверности датчика, которая является характеристической информацией, включенной в информацию о транспортном средстве. Достоверность датчика в данном случае может являться достоверностью датчика, который используется для генерирования плана движения и включается во внешний датчик 1 или внутренний датчик 3. В данной ситуации, в случае, когда достоверность датчика является низкой, блок 14 генерирования плана движения может уменьшить контрольный диапазон по сравнению со случаем, когда достоверность датчика является высокой. Блок 14 генерирования плана движения может распознать достоверность датчика, например, посредством получения данных от блока 13 распознавания сведений о состоянии транспортного средства.
Блок 14 генерирования плана движения может сгенерировать контрольный диапазон, например, на основе размера плоской области за пределами дороги для транспортного средства V, который является информацией об окружающей обстановке. В данной ситуации, в случае, когда плоская область является узкой, блок 14 генерирования плана движения может уменьшить контрольный диапазон по сравнению со случаем, когда плоская область является широкой. Блок 14 генерирования плана движения может распознать размер плоской области, например, посредством получения данных от блока 12 распознавания информации об окружающей обстановке.
Блок 14 генерирования плана движения может сгенерировать контрольный диапазон, например, на основе сведений о состоянии поверхности дорожного полотна дороги для транспортного средства V, которые являются информацией об окружающей обстановке. Например, в случае, когда поверхность дорожного полотна является влажной вследствие дождя или подобного, блок 14 генерирования плана движения может уменьшить контрольный диапазон по сравнению со случаем, когда поверхность дорожного полотна не является влажной. Блок 14 генерирования плана движения может распознать сведения о состоянии поверхности дорожного полотна, например, посредством получения данных от блока 12 распознавания информации об окружающей обстановке.
Несмотря на то, что в вышеприведенном описании блок 14 генерирования плана движения генерирует контрольный диапазон на основе любого из различных типов информации об окружающей обстановке, а также на основе множества сведений о состоянии транспортного средства, блок 14 генерирования плана движения может сгенерировать контрольный диапазон на основе двух или более различных типов информации об окружающей обстановке, а также на основе множества сведений о состоянии транспортного средства.
Блок 15 управления движением управляет автоматическим движением транспортного средства V на основе плана движения и контрольного диапазона, сгенерированного посредством блока 14 генерирования плана движения. В частности, на основе плана движения и контрольного диапазона, сгенерированного посредством блока 14 генерирования плана движения, а также на основе сведений о состоянии транспортного средства, распознанных посредством блока 13 распознавания сведений о состоянии транспортного средства, блок 15 управления движением вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства V становились эквивалентными целевым сведениям о состоянии транспортного средства, соответствующим целевому контрольному значению в плане движения. Блок 15 управления движением передает вычисленное командное контрольное значение на привод 6. В результате блок 15 управления движением управляет движением транспортного средства V таким образом, чтобы транспортное средство V автоматически двигалось в соответствии с планом движения. В данном случае целевые сведения о состоянии транспортного средства, соответствующие целевому контрольному значению, являются целевыми сведениями о состоянии транспортного средства, которые реализовываются посредством выхода привода 6 в зависимости от целевого контрольного значения в плане движения.
Более подробно, когда текущие сведения о состоянии транспортного средства не являются целевыми сведениями о состоянии транспортного средства, соответствующими целевому контрольному значению в плане движения, блок 15 управления движением приближает сведения о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства. В данной ситуации блок 15 управления движением сначала определяет, являются ли текущие сведения о состоянии транспортного средства, распознанные посредством блока 13 распознавания сведений о состоянии транспортного средства, сведениями о состоянии транспортного средства, соответствующими контрольному диапазону целевого контрольного значения. В случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону целевого контрольного значения, блок 15 управления движением вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства более плавно приближались к целевым сведениям о состоянии транспортного средства по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону.
В частности, например, в случае, когда текущее местоположение транспортного средства является местоположением, соответствующим контрольному диапазону целевого местоположения, блок 15 управления движением вычисляет командное контрольное значение таким образом, чтобы величина перемещения к целевому местоположению за единицу времени (например, за одну минуту) являлась меньшей по сравнению со случаем, когда текущее местоположение транспортного средства является местоположением, не соответствующим контрольному диапазону. Например, в случае, когда текущее местоположение транспортного средства является местоположением, соответствующим контрольному диапазону целевого местоположения, блок 15 управления движением вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства плавно приближались к целевым сведениям о состоянии транспортного средства, уделяя приоритетное внимание плавности движения, вместо быстрого приближения сведений о состоянии транспортного средства V к целевым сведениям о состоянии транспортного средства. Подобным образом, например, в случае, когда текущая скорость транспортного средства V является скоростью, соответствующей контрольному диапазону целевой скорости, блок 15 управления движением вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства плавно приближались к целевым сведениям о состоянии транспортного средства, уделяя приоритетное внимание плавности движения, вместо быстрого приближения сведений о состоянии транспортного средства V к целевым сведениям о состоянии транспортного средства. В данном случае для плавного приближения сведений о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства, уделяя приоритетное внимание плавности движения, например, можно приближать сведения о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства таким образом, чтобы поперечное ускорение, которое генерируется для транспортного средства V, становилось равным предварительно выбранному опорному значению или меньшим.
В то же время, в случае, когда текущие сведения о состоянии транспортного средства, распознанные посредством блока 13 распознавания сведений о состоянии транспортного средства, не являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону, блок 15 управления движением вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства более быстро приближались к целевым сведениям о состоянии транспортного средства по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону. В частности, например, в случае, когда текущее местоположение транспортного средства является местоположением, не соответствующим контрольному диапазону целевого местоположения, блок 15 управления движением вычисляет командное контрольное значение таким образом, чтобы величина перемещения к целевому местоположению за единицу времени (например, за одну минуту) являлась большей по сравнению со случаем, когда текущее местоположение транспортного средства является местоположением, соответствующим контрольному диапазону. Например, в случае, когда текущее местоположение транспортного средства является местоположением, не соответствующим контрольному диапазону целевого местоположения, блок 15 управления движением вычисляет командное контрольное значение, уделяя приоритетное внимание не плавности движения, а быстрому приближению сведений о состоянии транспортного средства V к целевым сведениям о состоянии транспортного средства. Подобным образом, например, в случае, когда текущая скорость транспортного средства V является скоростью, не соответствующей контрольному диапазону целевой скорости, блок 15 управления движением вычисляет командное контрольное значение, уделяя приоритетное внимание на плавности движения, а быстрому приближению сведений о состоянии транспортного средства V к целевым сведениям о состоянии транспортного средства.
То есть в случае, когда контрольный диапазон является малым, наряду с приближением сведений о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства, когда сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону, время для управления сведениями о состоянии транспортного средства таким образом, чтобы сведения о состоянии транспортного средства быстро приближались к целевым сведениям о состоянии транспортного средства, является большим, а время для управления сведениями о состоянии транспортного средства таким образом, чтобы сведения о состоянии транспортного средства плавно приближались к целевым сведениям о состоянии транспортного средства, является меньшим по сравнению со случаем, когда контрольный диапазон является большим. Вследствие этого, система 100 автоматического управления транспортным средством может повысить нижеследующее достижение сведениями о состоянии транспортного средства V целевых сведений о состоянии транспортного средства. В то же время, в случае, когда контрольный диапазон является большим, наряду с приближением сведений о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства, когда сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону, время для управления сведениями о состоянии транспортного средства таким образом, чтобы сведения о состоянии транспортного средства быстро приближались к целевым сведениям о состоянии транспортного средства, является меньшим, а время для управления сведениями о состоянии транспортного средства таким образом, чтобы сведения о состоянии транспортного средства плавно приближались к целевым сведениям о состоянии транспортного средства, является большим по сравнению со случаем, когда контрольный диапазон является малым. Вследствие этого, система 100 автоматического управления транспортным средством может предотвратить радикальное изменение в поведении транспортного средства V, а также может повысить плавность движения.
В качестве примера будет описано изменение местоположения транспортного средства в случае, когда блок 15 управления движением управляет движением транспортного средства таким образом, чтобы оно соответствовало плану движения. Предположим, что транспортное средство V движется по полосе R движения, как изображено на Фиг. 2. Предположим, что местоположение транспортного средства V не соответствует контрольному диапазону W целевого местоположения. Поскольку местоположение транспортного средства V не соответствует контрольному диапазону W, блок 15 управления движением управляет движением транспортного средства V таким образом, чтобы местоположение транспортного средства быстро приближалось к целевой траектории T, которая соединяет целевые местоположения. Траектория транспортного средства V на тот момент времени определяется в качестве траектории K1. Когда местоположение транспортного средства попадает в контрольный диапазон W целевого местоположения, блок 15 управления движением управляет движением транспортного средства V таким образом, чтобы местоположение транспортного средства плавно приближалось к целевой траектории T, которая соединяет целевые местоположения. Траектория транспортного средства V на тот момент времени определяется в качестве траектории K2. Соответственно в случае, когда местоположение транспортного средства V соответствует контрольному диапазону W целевого местоположения, блок 15 управления движением более плавно приближает местоположение транспортного средства к целевому местоположению по сравнению со случаем, когда местоположение транспортного средства V не соответствует контрольному диапазону W целевого местоположения.
Далее будет описана последовательность операций процесса, которая выполняется посредством системы 100 автоматического управления транспортным средством. Сначала, со ссылкой на графическое представление алгоритма, изображенное на Фиг. 6, будет описана последовательность операций процесса, посредством которой ЭБУ 10 генерирует план движения и контрольный диапазон. Например, когда водитель задает пункт назначения при помощи навигационной системы 5 и выполняет на интерфейсе 7 HMI операцию ввода для запуска автоматизированного вождения, ЭБУ 10 неоднократно и циклически выполняет следующий процесс генерирования плана движения и контрольного диапазона.
Сначала блок 13 распознавания сведений о состоянии транспортного средства распознает сведения о состоянии транспортного средства V. Блок 12 распознавания информации об окружающей обстановке распознает информацию об окружающей обстановке транспортного средства V (этап S11). Блок 14 генерирования плана движения генерирует план движения, в соответствии с предварительно заданным целевым маршрутом, на основе информации об окружающей обстановке транспортного средства V, а также на основе картографической информации, содержащейся в базе 4 картографических данных (этап S12). Блок 14 генерирования плана движения генерирует контрольный диапазон на основе, по меньшей мере, либо информации об окружающей обстановке транспортного средства V, распознанной посредством блока 12 распознавания информации об окружающей обстановке, либо сведений о состоянии транспортного средства, распознанных посредством блока 13 распознавания сведений о состоянии транспортного средства (этап S13). Блок 14 генерирования плана движения передает сгенерированный план движения и контрольный диапазон на блок 15 управления движением.
Далее, со ссылкой на графическое представление алгоритма, изображенное на Фиг. 7, будет описана последовательность операций процесса, посредством которой ЭБУ 10 управляет движением транспортного средства V на основе плана движения и контрольного диапазона. После того, как блок 14 генерирования плана движения сгенерировал план движения и контрольный диапазон, блок 15 управления движением начинает управлять движением транспортного средства V. Кроме того, когда блок 14 генерирования плана движения вновь генерирует план движения и контрольный диапазон, блок 15 управления движением управляет движением транспортного средства V на основе вновь сгенерированного плана движения и контрольного диапазона.
Сначала блок 15 управления движением определяет, являются ли текущие сведения о состоянии транспортного средства сведениями о состоянии транспортного средства, соответствующими контрольному диапазону целевого контрольного значения (этап S21). В случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону целевого контрольного значения (положительный результат определения, выполняемого на этапе S21), блок 15 управления движением вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства более плавно приближались к целевым сведениям о состоянии транспортного средства по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону. Затем блок 15 управления движением передает вычисленное командное контрольное значение на привод 6. Соответственно, блок 15 управления движением управляет движением транспортного средства V таким образом, чтобы сведения о состоянии транспортного средства плавно приближались к целевым сведениям о состоянии транспортного средства (этап S22).
В случае, когда текущие сведения о состоянии транспортного средства не являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону целевого контрольного значения (отрицательный результат определения, выполняемого на этапе S21), блок 15 управления движением вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства более быстро приближались к целевым сведениям о состоянии транспортного средства по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону. Затем блок 15 управления движением передает вычисленное командное контрольное значение на привод 6. Соответственно, блок 15 управления движением управляет движением транспортного средства V таким образом, чтобы сведения о состоянии транспортного средства быстро приближались к целевым сведениям о состоянии транспортного средства (этап S23).
Как было описано выше, в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону, система 100 автоматического управления транспортным средством в варианте осуществления более плавно приближает сведения о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону. То есть, в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону, система 100 автоматического управления транспортным средством более быстро приближает сведения о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону. Соответственно, в случае, когда сведения о состоянии транспортного средства значительно отклоняются от плана движения (в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону), система 100 автоматического управления транспортным средством может быстро приблизить сведения о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства в плане движения. Кроме того, в случае, когда сведения о состоянии транспортного средства незначительно отклоняются от плана движения (в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону), система 100 автоматического управления транспортным средством может повысить плавность движения посредством плавного приближения сведений о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства в плане движения.
В данном случае в процессе вычисления командного контрольного значения блок 15 управления движением может вычислить основное командное контрольное значение для приближения сведений о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства. Впоследствии блок 15 управления движением может скорректировать основное командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства плавно приближались к целевым сведениям о состоянии транспортного средства в случае, когда сведения о состоянии транспортного средства соответствуют контрольному диапазону целевого контрольного значения, или же может скорректировать основное командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства быстро приближались к целевым сведениям о состоянии транспортного средства в случае, когда сведения о состоянии транспортного средства не соответствуют контрольному диапазону целевого контрольного значения. В данном случае основное командное контрольное значение является командным контрольным значением, требующимся для приближения сведений о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства независимо от того, соответствуют ли сведения о состоянии транспортного средства контрольному диапазону. Основное командное контрольное значение корректируется вышеописанным образом в зависимости от того, соответствуют ли сведения о состоянии транспортного средства контрольному диапазону целевого контрольного значения. В качестве альтернативы, вместо предварительного вычисления основного командного контрольного значения для приближения сведений о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства, блок 15 управления движением может вычислить командное контрольное значение для плавного или быстрого приближения сведений о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства в зависимости от того, соответствуют ли сведения о состоянии транспортного средства контрольному диапазону целевого контрольного значения.
Второй вариант осуществления изобретения
В описании второго варианта осуществления будут подробно описаны отличия от первого варианта осуществления. Для обозначения элементов, идентичных или соответствующих элементам первого варианта осуществления, используются идентичные ссылочные позиции, при этом их повторное описание опускается. Фиг. 8 изображает блок-схему, демонстрирующую конфигурацию системы 100А автоматического управления транспортным средством, согласно второму варианту осуществления. Система 100А автоматического управления транспортным средством включает в себя внешний датчик 1, приемный блок 2 GPS, внутренний датчик 3, базу 4 картографических данных, навигационную систему 5, привод 6, первый блок 10А ЭБУ, второй блок 10В ЭБУ и интерфейс 7 HMI. В данном случае второй вариант осуществления отличается от первого варианта осуществления тем, что блок 14 генерирования плана движения и блок 15 управления движением включаются в различные ЭБУ.
Первый блок 10А ЭБУ и второй блок 10В ЭБУ управляют автоматическим движением транспортного средства V. Первый блок 10А ЭБУ является электронным блоком управления, включающим в себя процессор CPU, память ROM, память RAM и т.п. В первом блоке 10А ЭБУ программа, сохраненная в памяти ROM, загружается в память RAM и выполняется посредством процессора CPU, и посредством этого осуществляется управление различных типов.
Первый блок 10А ЭБУ, функционально, включает в себя блок 12 распознавания информации об окружающей обстановке, блок 13 распознавания сведений о состоянии транспортного средства и блок 14 генерирования плана движения. Этапы процесса, которые выполняются посредством блока 12 распознавания информации об окружающей обстановке, блока 13 распознавания сведений о состоянии транспортного средства и блока 14 генерирования плана движения второго варианта осуществления, совпадают с этапами процесса, которые выполняются посредством блока 12 распознавания информации об окружающей обстановке, блока 13 распознавания сведений о состоянии транспортного средства и блока 14 генерирования плана движения первого варианта осуществления. Кроме того, блок 12 распознавания информации об окружающей обстановке и блок 13 распознавания сведений о состоянии транспортного средства второго варианта осуществления выполняет этап S11 процесса, описанный с использованием Фиг. 6 в первом варианте осуществления. Блок 14 генерирования плана движения второго варианта осуществления выполняет этапы S12 и S13 процесса, описанные с использованием Фиг. 6 в первом варианте осуществления.
Второй блок 10В ЭБУ является электронным блоком управления, включающим в себя процессор CPU, память ROM, память RAM и т.п. Во втором блоке 10В ЭБУ программа, сохраненная в памяти ROM, загружается в память RAM и выполняется посредством процессора CPU, и посредством этого осуществляется управление различных типов.
Второй блок 10В ЭБУ, функционально, включает в себя блок 15 управления движением (первый вычислительный блок). Этап процесса, который выполняется посредством блока 15 управления движением второго варианта осуществления, совпадает с этапом процесса, который выполняется посредством блока 15 управления движением первого варианта осуществления. Кроме того, блок 15 управления движением второго варианта осуществления выполняет этапы S21 - S23 процесса, описанные с использованием Фиг. 7 в первом варианте осуществления.
Первый блок 10А ЭБУ и второй блок 10В ЭБУ являются блоками ЭБУ, которые физически отличаются друг от друга. Первый блок 10А ЭБУ и второй блок 10В ЭБУ сообщаются друг с другом по линии связи.
Как было описано выше, в системе 100А автоматического управления транспортным средством второго варианта осуществления блок 14 генерирования плана движения и блок 15 управления движением включаются в различные ЭБУ, и поэтому, например, можно рассматривать первый блок 10А ЭБУ в качестве общего элемента, который используется для всех типов транспортных средств, а второй блок 10В ЭБУ - в качестве элемента, зависящего от типа транспортного средства, который для каждого типа транспортного средства является отличным. В результате чего, можно поддерживать унифицированность элементов по сравнению со случаем, когда блок 14 генерирования плана движения и блок 15 управления движением включаются в единый ЭБУ.
Кроме того, в системе 100А автоматического управления транспортным средством второго варианта осуществления можно получить эффект, подобный первому варианту осуществления.
Третий вариант осуществления изобретения
В описании третьего варианта осуществления будут подробно описаны отличия от первого варианта осуществления. Для обозначения элементов, идентичных или соответствующих элементам первого варианта осуществления, используются идентичные ссылочные позиции, при этом их повторное описание опускается. Фиг. 9 изображает блок-схему, демонстрирующую конфигурацию системы 100В автоматического управления транспортным средством, согласно третьему варианту осуществления. Система 100В автоматического управления транспортным средством включает в себя внешний датчик 1, приемный блок 2 GPS, внутренний датчик 3, базу 4 картографических данных, навигационную систему 5, блок 60 привода, блок 20 ЭБУ и интерфейс 7 HMI. В данном случае третий вариант осуществления отличается от первого варианта осуществления главным образом тем, что блок 62 управления приводом блока 60 привода управляет приводом 61 на основе контрольного диапазона.
Блок 20 ЭБУ управляет автоматическим движением транспортного средства V. Блок 20 ЭБУ является электронным блоком управления, включающим в себя процессор CPU, память ROM, память RAM и т.п. В блоке 20 ЭБУ программа, сохраненная в памяти ROM, загружается в память RAM и выполняется посредством процессора CPU, и посредством этого осуществляется управление различных типов. Блок 20 ЭБУ может быть сконфигурирован посредством множества электронных блоков управления.
Блок 20 ЭБУ, функционально, включает в себя блок 12 распознавания информации об окружающей обстановке, блок 13 распознавания сведений о состоянии транспортного средства, блок 14 генерирования плана движения и блок 15В управления движением (второй вычислительный блок). Этапы процесса, которые выполняются посредством блока 12 распознавания информации об окружающей обстановке, блока 13 распознавания сведений о состоянии транспортного средства и блока 14 генерирования плана движения третьего варианта осуществления, совпадают с этапами процесса, которые выполняются посредством блока 12 распознавания информации об окружающей обстановке, блока 13 распознавания сведений о состоянии транспортного средства и блока 14 генерирования плана движения первого варианта осуществления. Кроме того, блок 12 распознавания информации об окружающей обстановке и блок 13 распознавания сведений о состоянии транспортного средства третьего варианта осуществления выполняют этап S11 процесса, описанный с использованием Фиг. 6 в первом варианта осуществления. Блок 14 генерирования плана движения третьего варианта осуществления выполняет этапы S12 и S13 процесса, описанные с использованием Фиг. 6 в первом варианте осуществления.
Блок 15В управления движением управляет автоматическим движением транспортного средства V на основе плана движения, сгенерированного посредством блока 14 генерирования плана движения. В частности, на основе плана движения, сгенерированного посредством блока 14 генерирования плана движения, а также на основе сведений о состоянии транспортного средства, распознанных посредством блока 13 распознавания сведений о состоянии транспортного средства, блок 15В управления движением вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства V становись эквивалентными целевым сведениям о состоянии транспортного средства, соответствующим целевому контрольному значению в плане движения. Блок 15В управления движением передает вычисленное командное контрольное значение на блок 60 привода. В результате чего, блок 15В управления движением управляет движением транспортного средства V таким образом, чтобы транспортное средство V автоматически двигалось в соответствии с планом движения. Кроме того, совместно с вычисленным командным контрольным значением, блок 15В управления движением передает контрольный диапазон, сгенерированный посредством блока 14 генерирования плана движения, на блок 60 привода. В отличие от блока 15 управления движением первого варианта осуществления и второго варианта осуществления, блок 15В управления движением не использует контрольный диапазон в процессе вычисления командного контрольного значения.
Блок 60 привода включает в себя привод 61 и блок 62 управления приводом. Привод 61 является аналогичным приводу 6 первого варианта осуществления. Командное контрольное значение, сгенерированное посредством блока 14 генерирования плана движения, передается на привод 61. Привод 61 управляет движением транспортного средства V посредством выхода, соответствующего командному контрольному значению.
Блок 62 управления приводом управляет параметром для привода 61 на основе сведений о состоянии транспортного средства, распознанных посредством блока 13 распознавания сведений о состоянии транспортного средства, а также на основе контрольного диапазона, сгенерированного посредством блока 14 генерирования плана движения. Параметр для привода 61, например, является коэффициентом усиления в обратной передаче командного контрольного значения на привод 61. Посредством управления параметром для привода 61, блок 62 управления приводом изменяет быстроту реагирования привода 61. В данном случае для изменения быстроты реагирования следует изменить время, необходимое для того, чтобы выходное значение привода 61 достигло командного контрольного значения, которое передается от блока 15В управления движением. В частности, например, блок 62 управления приводом может изменить коэффициент усиления в обратной передаче командного контрольного значения на привод 61 в качестве управления параметром для привода 61. В результате чего, блок 62 управления приводом может быстро или плавно приблизить сведения о состоянии транспортного средства V к целевым сведениям о состоянии транспортного средства, соответствующим целевому контрольному значению в плане движения.
В данном случае, в дополнение к изменению вышеупомянутого коэффициента усиления, блок 62 управления приводом может изменить максимальное значение выхода, который разрешен для управления приводом 61, в качестве управления параметром для привода 61.
Более подробно, блок 62 управления приводом сначала определяет, являются ли текущие сведения о состоянии транспортного средства, распознанные посредством блока 13 распознавания сведений о состоянии транспортного средства, сведениями о состоянии транспортного средства, соответствующими контрольному диапазону целевого контрольного значения. В случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону целевого контрольного значения, блок 62 управления приводом изменяет параметр таким образом, чтобы выход привода 61 более плавно приближался к выходу, соответствующему командному контрольному значению, по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону. В то же время, в случае, когда текущие сведения о состоянии транспортного средства, распознанные посредством блока 13 распознавания сведений о состоянии транспортного средства, не являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону, блок 62 управления приводом изменяет параметр (например, восстанавливает параметр) таким образом, чтобы выход привода 61 более быстро приближался к выходу, соответствующему командному контрольному значению, по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону.
В качестве примера будет описано изменение местоположения транспортного средства в случае, когда приводом 61 управляют таким образом, чтобы выход привода 61 становился эквивалентным выходу, соответствующему командному контрольному значению. Предположим, что транспортное средство V движется по полосе R движения, как изображено на Фиг. 2. Предположим, что местоположение транспортного средства V не соответствует контрольному диапазону W целевого местоположения. Поскольку местоположение транспортного средства V не соответствует контрольному диапазону W, блок 62 управления приводом управляет параметром для привода 61 таким образом, чтобы выход привода 61 быстро приближался к выходу, соответствующему командному контрольному значению. Траектория транспортного средства V на тот момент времени определяется в качестве траектории K1. Когда местоположение транспортного средства попадает в контрольный диапазон W целевого местоположения, блок 62 управления приводом управляет параметром для привода 61 таким образом, чтобы выход привода 61 более плавно приближался к выходу, соответствующему командному контрольному значению. Траектория транспортного средства V на тот момент времени определяется в качестве траектории K2. В результате в случае, когда местоположение транспортного средства соответствует контрольному диапазону W целевого местоположения, местоположение транспортного средства V более плавно приближается к целевому местоположению по сравнению со случаем, когда местоположение транспортного средства не соответствует контрольному диапазону W целевого местоположения.
Далее будет описана последовательность операций процесса, которая выполняется посредством системы 100В автоматического управления транспортным средством. Последовательность операций процесса, посредством которой блок 20 ЭБУ генерирует план движения и контрольный диапазон, совпадает с последовательностью операций процесса, описанной с использованием Фиг. 6 в первом варианте осуществления, и поэтому ее описание опущено. То есть блок 12 распознавания информации об окружающей обстановке и блок 13 распознавания сведений о состоянии транспортного средства третьего варианта осуществления выполняют этап S11 процесса, описанный с использованием Фиг. 6 в первом варианте осуществления. Блок 14 генерирования плана движения третьего варианта осуществления выполняет этапы S12 и S13 процесса, описанные с использованием Фиг. 6 в первом варианте осуществления.
Далее, со ссылкой на графическое представление алгоритма, изображенное на Фиг. 10, будет описана последовательность операций процесса, посредством который блок 15В управления движением вычисляет командное контрольное значение, а блок 62 управления приводом управляет параметром для привода 61 на основе контрольного диапазона. После того, как блок 14 генерирования плана движения сгенерировал план движения и контрольный диапазон, блок 15В управления движением вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства V становились эквивалентными целевым сведениям о состоянии транспортного средства, соответствующим целевому контрольному значению в плане движения, на основе плана движения, сгенерированного посредством блока 14 генерирования плана движения, а также на основе сведений о состоянии транспортного средства, распознанных посредством блока 13 распознавания сведений о состоянии транспортного средства (этап S31). Блок 15В управления движением передает вычисленное командное контрольное значение и контрольный диапазон, сгенерированный посредством блока 14 генерирования плана движения, на блок 60 привода.
Блок 62 управления приводом определяет, являются ли текущие сведения о состоянии транспортного средства, распознанные посредством блока 13 распознавания сведений о состоянии транспортного средства, сведениями о состоянии транспортного средства, соответствующими контрольному диапазону целевого контрольного значения (этап S32). В случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону целевого контрольного значения (положительный результат определения, выполняемого на этапе S32), блок 62 управления приводом управляет параметром для привода 61 таким образом, чтобы выход привода 61 более плавно приближался к выходу, соответствующему командному контрольному значению, по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону (этап S33). В результате чего, сведения о состоянии транспортного средства V плавно приближаются к целевым сведениям о состоянии транспортного средства.
В случае, когда текущие сведения о состоянии транспортного средства, распознанные посредством блока 13 распознавания сведений о состоянии транспортного средства, не являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону целевого контрольного значения (отрицательный результат определения, выполняемого на этапе S32), блок 62 управления приводом управляет параметром для привода 61 таким образом, чтобы выход привода 61 более быстро приближался к выходу, соответствующему командному контрольному значению, по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону (этап S34). В результате чего, сведения о состоянии транспортного средства V быстро приближаются к целевым сведениям о состоянии транспортного средства.
Блок 15 управления движением и блок 62 управления приводом выполняют этапы S31 - S34 процесса на основе текущего плана движения и контрольного диапазона до тех пор, пока блок 14 генерирования плана движения не сгенерирует новый план движения и контрольный диапазон.
Как было описано выше, в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону, система 100В автоматического управления транспортным средством третьего варианта осуществления более плавно приближает выход привода 61 к выходу, соответствующему командному контрольному значению, по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону. То есть в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону, система 100В автоматического управления транспортным средством более быстро приближает выход привода 61 к выходу, соответствующему командному контрольному значению, по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону. В результате чего, в случае, когда сведения о состоянии транспортного средства значительно отклоняются от плана движения (в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону), система 100В автоматического управления транспортным средством может быстро приблизить сведения о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства в плане движения. Кроме того, в случае, когда сведения о состоянии транспортного средства незначительно отклоняются от плана движения (в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону), система 100В автоматического управления транспортным средством может повысить плавность движения посредством плавного приближения сведений о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства в плане движения.
В данном случае, в третьем варианте осуществления блок 62 управления приводом не должен в обязательном порядке быть объединен с приводом 61. Например, блок 62 управления приводом может быть включен в блок 20 ЭБУ или может быть включен в ЭБУ, который отличается от блока 20 ЭБУ.
Кроме того, вместо контрольного диапазона, блок 15В управления движением может передать на блок 60 привода диапазон, который является диапазоном параметра для управления приводом 61 и вычисляется на основе контрольного диапазона. В данной ситуации блок 62 управления приводом может определить, что текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону целевого контрольного значения, в случае, когда текущий параметр для управления приводом 61 соответствует диапазону, который является диапазоном параметра для управления приводом 61 и передается от блока 15В управления движением. Кроме того, блок 62 управления приводом может определить, что текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону целевого контрольного значения, в случае, когда текущий параметр для управления приводом 61 не соответствует диапазону, который является диапазоном параметра для управления приводом 61 и передается от блока 15В управления движением.
Четвертый вариант осуществления изобретения
В описании четвертого варианта осуществления будут подробно описаны отличия от третьего варианта осуществления. Для обозначения элементов, идентичных или соответствующих элементам третьего варианта осуществления, используются идентичные ссылочные позиции, при этом их повторное описание опускается. Фиг. 11 изображает блок-схему, демонстрирующую конфигурацию системы 100С автоматического управления транспортным средством, согласно четвертому варианту осуществления. Система 100С автоматического управления транспортным средством включает в себя внешний датчик 1, приемный блок 2 GPS, внутренний датчик 3, базу 4 картографических данных, навигационную систему 5, блок 60 привода, первый ЭБУ 20А, второй ЭБУ 20В и интерфейс 7 HMI. В данном случае четвертый вариант осуществления отличается от третьего варианта осуществления тем, что блок 14 генерирования плана движения и блок 15В управления движением включаются в различные ЭБУ.
Первый ЭБУ 20А и второй ЭБУ 20В управляют автоматическим движением транспортного средства V. Первый ЭБУ 20А является электронным блоком управления, включающим в себя процессор CPU, память ROM, память RAM и т.п. В первом ЭБУ 20А программа, сохраненная в памяти ROM, загружается в память RAM и выполняется посредством процессора CPU, и посредством этого осуществляется управление различных типов.
Первый ЭБУ 20А, функционально, включает в себя блок 12 распознавания информации об окружающей обстановке, блок 13 распознавания сведений о состоянии транспортного средства и блок 14 генерирования плана движения. Этапы процесса, которые выполняются посредством блока 12 распознавания информации об окружающей обстановке, блока 13 распознавания сведений о состоянии транспортного средства и блока 14 генерирования плана движения четвертого варианта осуществления, совпадают с этапами процесса, которые выполняются посредством блока 12 распознавания информации об окружающей обстановке, блока 13 распознавания сведений о состоянии транспортного средства и блока 14 генерирования плана движения первого варианта осуществления. Кроме того, блок 12 распознавания информации об окружающей обстановке и блок 13 распознавания сведений о состоянии транспортного средства четвертого варианта осуществления выполняет этап S11 процесса, описанный с использованием Фиг. 6 в первом варианте осуществления. Блок 14 генерирования плана движения четвертого варианта осуществления выполняет этапы S12 и S13 процесса, описанные с использованием Фиг. 6 в первом варианте осуществления.
Второй ЭБУ 20В является электронным блоком управления, включающим в себя процессор CPU, память ROM, память RAM и т.п. Во втором ЭБУ 20В программа, сохраненная в памяти ROM, загружается в память RAM и выполняется посредством процессора CPU, и посредством этого осуществляется управление различных типов.
Второй ЭБУ 20В, функционально, включает в себя блок 15В управления движением (второй вычислительный блок). Этап процесса, который выполняется посредством блока 15В управления движением четвертого варианта осуществления, совпадает с этапом процесса, который выполняется посредством блока 15В управления движением третьего варианта осуществления. Кроме того, блок 15В управления движением четвертого варианта осуществления выполняет этап S31 процесса, описанный с использованием Фиг. 10 в третьем варианте осуществления.
Первый ЭБУ 20А и второй ЭБУ 20В являются ЭБУ, которые физически отличаются друг от друга. Первый ЭБУ 20А и второй ЭБУ 20В могут сообщаться друг с другом по линии связи.
Как было описано выше, в системе 100С автоматического управления транспортным средством четвертого варианта осуществления блок 14 генерирования плана движения и блок 15В управления движением включаются в различные ЭБУ, и поэтому, например, можно рассматривать первый ЭБУ 20А в качестве общего элемента, который используется для всех типов транспортных средств, а второй ЭБУ 20В - в качестве элемента, зависящего от типа транспортного средства, который для каждого типа транспортного средства является отличным. В результате можно поддерживать унифицированность элементов по сравнению со случаем, когда блок 14 генерирования плана движения и блок 15В управления движением включаются в единый ЭБУ.
Кроме того, в системе 100С автоматического управления транспортным средством четвертого варианта осуществления можно получить эффект, подобный третьему варианту осуществления.
В данном случае, в четвертом варианте осуществления блок 62 управления приводом не должен в обязательном порядке быть объединен с приводом 61. Например, блок 62 управления приводом может быть включен во второй ЭБУ 20В или может быть включен в ЭБУ, который отличается от второго ЭБУ 20В.
Соответственно были описаны изобретения варианты осуществления. Однако изобретение не ограничивается вышеописанными вариантами осуществления. Далее будут описаны различные модификации.
Первая модификация
В первой модификации, например, блок 14 генерирования плана движения первого варианта осуществления может сгенерировать контрольный диапазон (далее в настоящем документе будет называться "первым контрольным диапазоном") целевого контрольного значения для транспортного средства V в плане движения, а также может сгенерировать второй контрольный диапазон, который включает в себя первый контрольный диапазон и является шире первого контрольного диапазона. В данной ситуации, в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими второму контрольному диапазону целевого контрольного значения, и не соответствующими первому контрольному диапазону целевого контрольного значения, блок 15 управления движением вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства более плавно приближались к целевым сведениям о состоянии транспортного средства по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими второму контрольному диапазону. Кроме того, в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими первому контрольному диапазону целевого контрольного значения, блок 15 управления движением вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства более плавно приближались к целевым сведениям о состоянии транспортного средства по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими второму контрольному диапазону, и не соответствующими первому контрольному диапазону. Соответственно степень плавности, когда сведения о состоянии транспортного средства приближаются к целевым сведениям о состоянии транспортного средства, может быть увеличена поэтапно, по мере приближения сведений о состоянии транспортного средства V к целевым сведениям о состоянии транспортного средства.
В данном случае блок 14 генерирования плана движения может сгенерировать три или более контрольных диапазонов, подобно случаю генерирования первого контрольного диапазона и второго контрольного диапазона. В данной ситуации блок 15 управления движением может поэтапно увеличивать степень плавности, когда сведения о состоянии транспортного средства приближаются к целевым сведениям о состоянии транспортного средства, по мере приближения сведений о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства.
В качестве примера будет описано изменение местоположения транспортного средства в случае, когда блок 14 генерирования плана движения генерирует первый контрольный диапазон и второй контрольный диапазон. Предположим, что транспортное средство V движется по полосе R движения, как изображено на Фиг. 12. Предположим, что блок 14 генерирования плана движения генерирует первый контрольный диапазон W11 и второй контрольный диапазон W12 в качестве контрольного диапазона целевого местоположения. Предположим, что местоположение транспортного средства V не соответствует второму контрольному диапазону W12 целевого местоположения. Поскольку местоположение транспортного средства V не соответствует второму контрольному диапазону W12 целевого местоположения, блок 15 управления движением управляет транспортным средством V таким образом, чтобы местоположение транспортного средства быстро приближалось к целевой траектории T, которая соединяет целевые местоположения. Траектория транспортного средства V на тот момент времени определяется в качестве траектории K11. Когда местоположение транспортного средства попадает во второй контрольный диапазон W12 целевого местоположения и не соответствует первому контрольному диапазону W11, блок 15 управления движением управляет транспортным средством V таким образом, чтобы местоположение транспортного средства более плавно приближалось к целевой траектории T, которая соединяет целевые местоположения, по сравнению со случаем, когда местоположение транспортного средства не соответствует второму контрольному диапазону W12. Траектория транспортного средства V на тот момент времени определяется в качестве траектории K12. Когда местоположение транспортного средства попадает в первый контрольный диапазон W11 целевого местоположения, блок 15 управления движением управляет транспортным средством V таким образом, чтобы местоположение транспортного средства более плавно приближалось к целевой траектории T, которая соединяет целевые местоположения, по сравнению со случаем, когда местоположение транспортного средства соответствует второму контрольному диапазону W12 и не соответствует первому контрольному диапазону W11. Траектория транспортного средства V на тот момент времени определяется в качестве траектории K13. Соответственно местоположение транспортного средства может более плавно приближаться к целевому местоположению, по мере приближения местоположения транспортного средства к целевому местоположению.
В данном случае, также во втором варианте осуществления, подобно первой модификации, блок 14 генерирования плана движения может сгенерировать множество контрольных диапазонов, при этом блок 15 управления движением может управлять движением транспортного средства V на основе сгенерированного множества контрольных диапазонов.
Вторая модификация
Подобно первой модификации, во второй модификации, например, блок 14 генерирования плана движения третьего варианта осуществления может сгенерировать первый контрольный диапазон целевого контрольного значения для транспортного средства V в плане движения, а также может сгенерировать второй контрольный диапазон, который включает в себя первый контрольный диапазон и является шире первого контрольного диапазона. В данной ситуации, в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими второму контрольному диапазону целевого контрольного значения, и не соответствующими первому контрольному диапазону целевого контрольного значения, блок 62 управления приводом изменяет параметр таким образом, чтобы выходное значение привода 61 более плавно приближалось к командному контрольному значению по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими второму контрольному диапазону. Кроме того, в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими первому контрольному диапазону целевого контрольного значения, блок 62 управления приводом изменяет параметр таким образом, чтобы выходное значение привода 61 более плавно приближалось к командному контрольному значению по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими второму контрольному диапазону, и не соответствующими первому контрольному диапазону. Соответственно степень плавности, когда выходное значение привода 61 приближается к командному контрольному значению, может быть увеличена поэтапно, по мере приближения сведений о состоянии транспортного средства V к целевым сведениям о состоянии транспортного средства.
В данном случае блок 14 генерирования плана движения может сгенерировать три или более контрольных диапазонов, подобно случаю генерирования первого контрольного диапазона и второго контрольного диапазона. В данной ситуации блок 62 управления приводом может поэтапно увеличивать степень плавности, когда выходное значение привода 61 приближается к командному контрольному значению, по мере приближения сведений о состоянии транспортного средства V к целевым сведениям о состоянии транспортного средства.
В качестве примера будет описано изменение местоположения транспортного средства в случае, когда блок 14 генерирования плана движения генерирует первый контрольный диапазон и второй контрольный диапазон. Предположим, что транспортное средство V движется по полосе R движения, как изображено на Фиг. 12. Предположим, что блок 14 генерирования плана движения генерирует первый контрольный диапазон W11 и второй контрольный диапазон W12 в качестве контрольного диапазона целевого местоположения. Предположим, что местоположение транспортного средства V не соответствует второму контрольному диапазону W12 целевого местоположения. Поскольку местоположение транспортного средства V не соответствует второму контрольному диапазону W12 целевого местоположения, блок 62 управления приводом изменяет параметр таким образом, чтобы выходное значение привода 61 быстро приближалось к командному контрольному значению. Траектория транспортного средства V на тот момент времени определяется в качестве траектории K11. Когда местоположение транспортного средства попадает во второй контрольный диапазон W12 целевого местоположения и не соответствует первому контрольному диапазону W11 целевого местоположения, блок 62 управления приводом изменяет параметр таким образом, чтобы выходное значение привода 61 более плавно приближалось к командному контрольному значению по сравнению со случаем, когда местоположение транспортного средства не соответствует второму контрольному диапазону W12. Траектория транспортного средства V на тот момент времени определяется в качестве траектории K12. Когда местоположение транспортного средства попадает в первый контрольный диапазон W11 целевого местоположения, блок 62 управления приводом изменяет параметр таким образом, чтобы выходное значение привода 61 более плавно приближалось к командному контрольному значению по сравнению со случаем, когда местоположение транспортного средства соответствует второму контрольному диапазону W12 и не соответствует первому контрольному диапазону W11. Траектория транспортного средства V на тот момент времени определяется в качестве траектории K13. Соответственно параметр может быть изменен таким образом, чтобы выходное значение привода 61 более плавно приближалось к командному контрольному значению, по мере приближения местоположения транспортного средства к целевому местоположению.
В данном случае, также в четвертом варианте осуществления, подобно второй модификации, блок 14 генерирования плана движения может сгенерировать множество контрольных диапазонов, при этом блок 62 управления приводом может управлять параметром для привода 61 на основе сгенерированного множества контрольных диапазонов.
Третья модификация
В третьей модификации, например, блок 15 управления движением первого варианта осуществления может вычислить значение нижнего предела контрольного диапазона (минимальное значение контрольного диапазона) на основе, по меньшей мере, либо информации об окружающей обстановке, либо информации о транспортном средстве, а также может передать вычисленное значение нижнего предела контрольного диапазона на блок 14 генерирования плана движения. Затем, в процессе генерирования контрольного диапазона, блок 14 генерирования плана движения может сгенерировать контрольный диапазон таким образом, чтобы контрольный диапазон являлся равным или большим поступающего значения нижнего предела контрольного диапазона. Значение нижнего предела контрольного диапазона может являться максимальным значением ошибки управления в случае, когда сведениями о состоянии транспортного средства V управляют таким образом, чтобы они становились эквивалентными целевым сведениям о состоянии транспортного средства. Максимальное значение ошибки управления может быть вычислено, например, на основе, по меньшей мере, либо сведений о состоянии транспортного средства V, либо характеристики, связанной с движением транспортного средства V, либо достоверности датчика, который используется для управления движением транспортного средства V, либо сведений о состоянии поверхности дорожного полотна.
Например, сведениями о состоянии транспортного средства V может являться скорость транспортного средства V, давление воздуха в шине транспортного средства V, которое обнаруживается посредством пневматического датчика, или подобное. В случае, когда скорость транспортного средства V является большой, блок 15 управления движением может вычислить максимальное значение ошибки управления таким образом, чтобы максимальное значение ошибки управления увеличивалось по сравнению со случаем, когда скорость транспортного средства V является малой. Кроме того, в случае, когда давление воздуха в шине является низким, блок 15 управления движением может вычислить максимальное значение ошибки управления таким образом, чтобы максимальное значение ошибки управления увеличивалось по сравнению со случаем, когда давление воздуха в шине является высоким. Например, характеристикой, связанной с движением транспортного средства V, может являться характеристика тормоза, характеристика ускорения или подобное. В случае, когда характеристика тормоза является малой, блок 15 управления движением может вычислить максимальное значение ошибки управления таким образом, чтобы максимальное значение ошибки управления увеличивалось по сравнению со случаем, когда характеристика тормоза является большой. Кроме того, в случае, когда характеристика ускорения является малой, блок 15 управления движением может вычислить максимальное значение ошибки управления таким образом, чтобы максимальное значение ошибки управления увеличивалось по сравнению со случаем, когда характеристика ускорения является большой. Например, достоверность датчика, который используется для управления движением транспортного средства V, может являться достоверностью датчика скорости или подобным. В случае, когда достоверность датчика скорости является низкой, блок 15 управления движением может вычислить максимальное значение ошибки управления таким образом, чтобы максимальное значение ошибки управления увеличивалось по сравнению со случаем, когда достоверность датчика скорости является высокой. Например, состояние поверхности дорожного полотна является состоянием, в котором поверхность дорожного полотна является сухой, или состоянием, в котором поверхность дорожного полотна является влажной. В случае, когда поверхность дорожного полотна является влажной, блок 15 управления движением может вычислить максимальное значение ошибки управления таким образом, чтобы максимальное значение ошибки управления увеличивалось по сравнению со случаем, когда поверхность дорожного полотна является сухой.
В данном случае, например, в момент начала активации системы (например, в момент включения зажигания) система 100 автоматического управления транспортным средством может использовать предварительно сохраненное стандартное значение в качестве характеристики, связанной с движением транспортного средства V, или достоверности датчика, который используется для управления движением транспортного средства V. Стандартное значение, например, может являться значением с предположением о типичных сведениях о состоянии транспортного средства или может являться значением с предположением о сведениях о состоянии транспортного средства, при которых управляемость транспортного средства становится хуже. Например, система 100 автоматического управления транспортным средством может использовать состояние сухой поверхности дорожного полотна или состояние влажной поверхности дорожного полотна в качестве состояния поверхности дорожного полотна в момент начала активации системы. После того, как транспортное средство V начнет движение, система 100 автоматического управления транспортным средством может обновить стандартное значение на основе результатов обнаружения различных датчиков во время движения.
В процессе генерирования контрольного диапазона на основе, по меньшей мере, либо информации об окружающей обстановке транспортного средства V, распознанной посредством блока 12 распознавания информации об окружающей обстановке, либо сведений о состоянии транспортного средства, распознанных посредством блока 13 распознавания сведений о состоянии транспортного средства, блок 14 генерирования плана движения генерирует контрольный диапазон таким образом, чтобы контрольный диапазон являлся равным или большим значения нижнего предела контрольного диапазона, поступающего с блока 15 управления движением. Поскольку блок 14 генерирования плана движения генерирует контрольный диапазон таким образом, чтобы контрольный диапазон являлся равным или большим значения нижнего предела контрольного диапазона, поступающего с блока 15 управления движением, блок 15 управления движением может управлять движением транспортного средства V таким образом, чтобы сведения о состоянии транспортного средства V становились эквивалентными целевым сведениям о состоянии транспортного средства в пределах контрольного диапазона.
Может возникнуть случай, когда блок 14 генерирования плана движения не может сгенерировать контрольный диапазон таким образом, чтобы контрольный диапазон являлся равным или большим значения нижнего предела контрольного диапазона, поступающего с блока 15 управления движением, в процессе генерирования контрольного диапазона на основе, по меньшей мере, либо информации об окружающей обстановке транспортного средства V, распознанной посредством блока 12 распознавания информации об окружающей обстановке, либо сведений о состоянии транспортного средства, распознанных посредством блока 13 распознавания сведений о состоянии транспортного средства. В частности, например, в случае, когда транспортное средство V движется с большой скоростью и ширина полосы движения является малой, блок 14 генерирования плана движения генерирует малый контрольный диапазон. На данном этапе блок 14 генерирования плана движения иногда не может сгенерировать контрольный диапазон, равный или больший значения нижнего предела контрольного диапазона. В таком случае, например, ЭБУ 10 может замедлить транспортное средство V для того, чтобы поместить транспортное средство V в состояние, в котором может быть сгенерирован контрольный диапазон. В качестве альтернативы, ЭБУ 10 может заново сгенерировать план движения транспортного средства V. ЭБУ 10 может завершить автоматическое управление приводом. ЭБУ 10 может столкнуться со случаем, например, посредством предупреждения водителя о невозможности генерирования контрольного диапазона, равного или большего значения нижнего предела контрольного диапазона.
Для блока 14 генерирования плана движения блок 15 управления движением может передать одиночное значение нижнего предела контрольного диапазона или может передать множество значений нижнего предела контрольного диапазона. Например, в случае, когда значение нижнего предела контрольного диапазона зависит от скорости, блок 15 управления движением может сгенерировать значение нижнего предела контрольного диапазона для каждой скорости, а также может передать их на блок 14 генерирования плана движения. В данной ситуации, в процессе генерирования контрольного диапазона, блок 14 генерирования плана движения, например, может сгенерировать контрольный диапазон на основе значения нижнего предела контрольного диапазона, соответствующего скорости, включенной в план движения. В случае, когда обеспечивается множество значений нижнего предела контрольного диапазона, и когда блок 14 генерирования плана движения может сгенерировать только контрольный диапазон, который меньше наименьшего значения нижнего предела контрольного диапазона, ЭБУ 10 может замедлить транспортное средство V для того, чтобы поместить транспортное средство V в состояние, в котором может быть сгенерирован контрольный диапазон, как было описано выше. Подобным образом, ЭБУ 10 может заново сгенерировать план движения транспортного средства V. В качестве альтернативы, ЭБУ 10 может завершить автоматическое управление приводом. ЭБУ 10 может столкнуться со случаем, например, посредством предупреждения водителя о невозможности генерирования контрольного диапазона, равного или большего значения нижнего предела контрольного диапазона.
В данном случае, также во втором варианте осуществления, подобно третьей модификации, блок 15 управления движением может сгенерировать значение нижнего предела контрольного диапазона, а также может передать его на блок 14 генерирования плана движения. Затем блок 14 генерирования плана движения может сгенерировать контрольный диапазон таким образом, чтобы контрольный диапазон являлся равным или большим поступающего значения нижнего предела контрольного диапазона. Также в третьем варианте осуществления и четвертом варианте осуществления, подобно третьей модификации, блок 15В управления движением может сгенерировать значение нижнего предела контрольного диапазона, а также может передать его на блок 14 генерирования плана движения. Затем блок 14 генерирования плана движения может сгенерировать контрольный диапазон таким образом, чтобы контрольный диапазон являлся равным или большим поступающего значения нижнего предела контрольного диапазона.
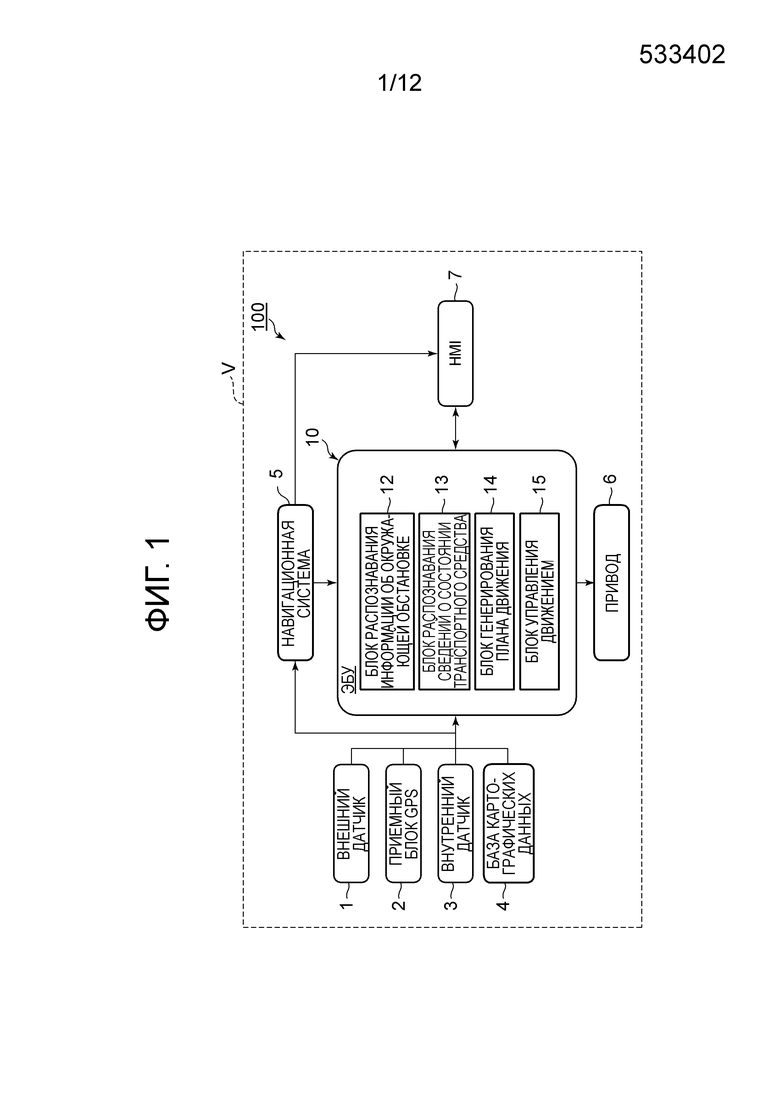
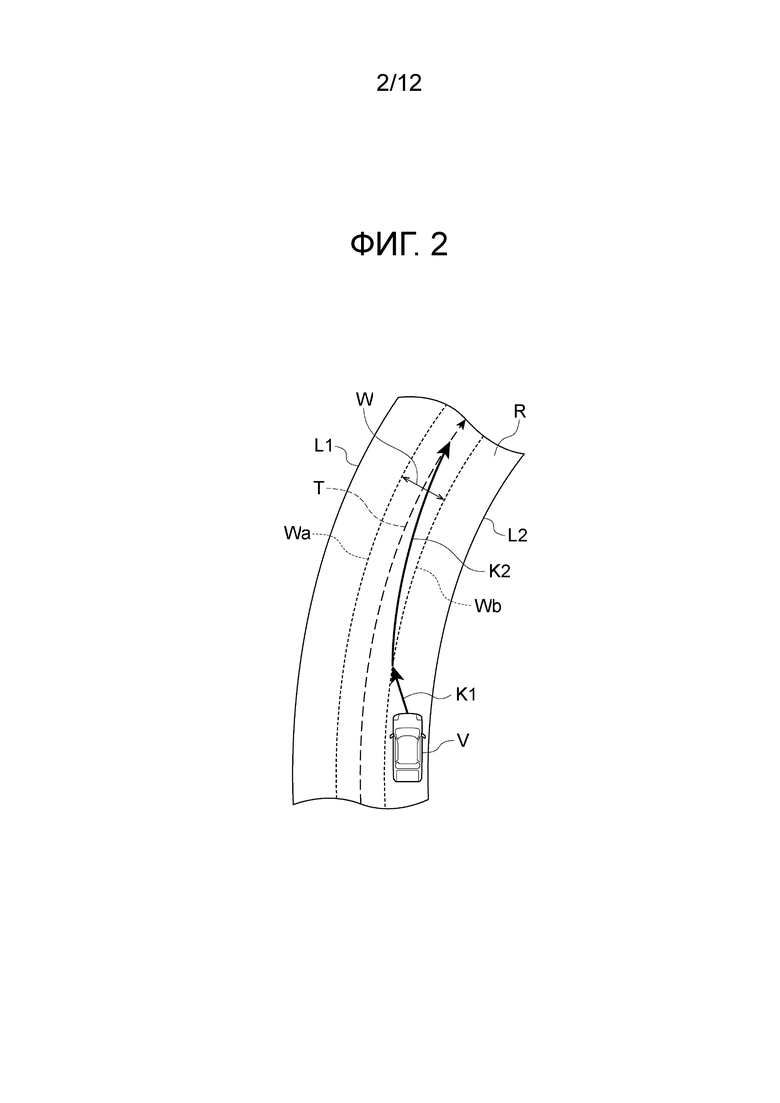
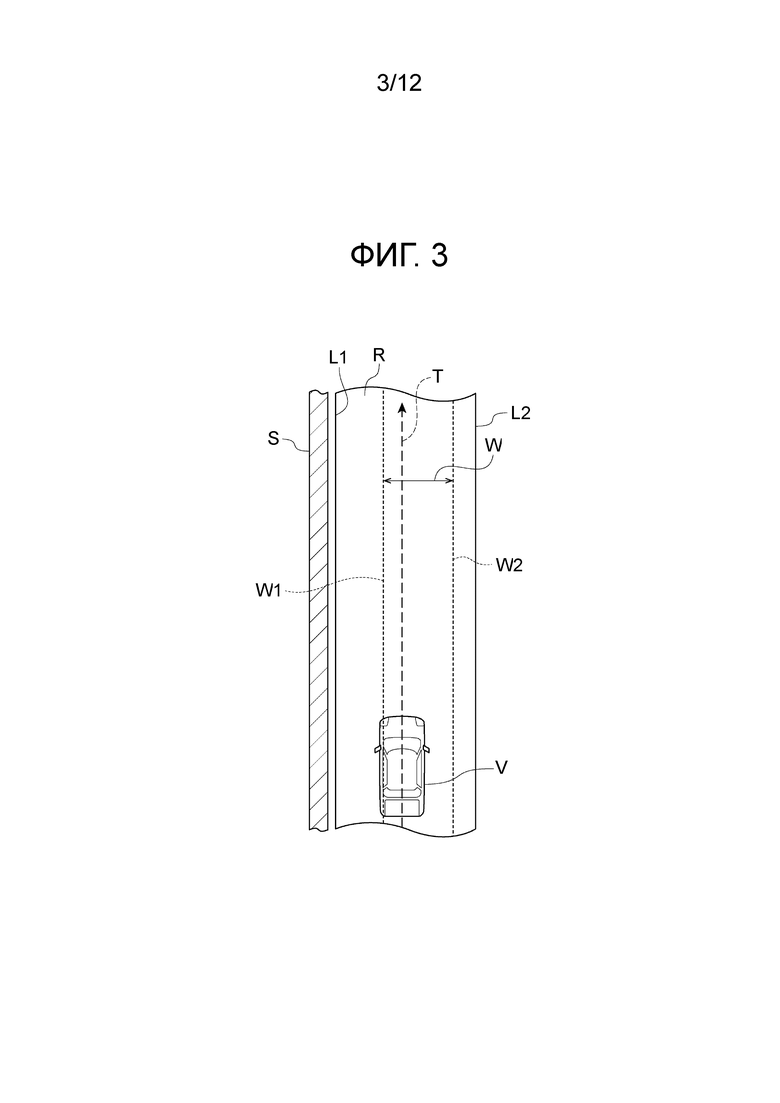
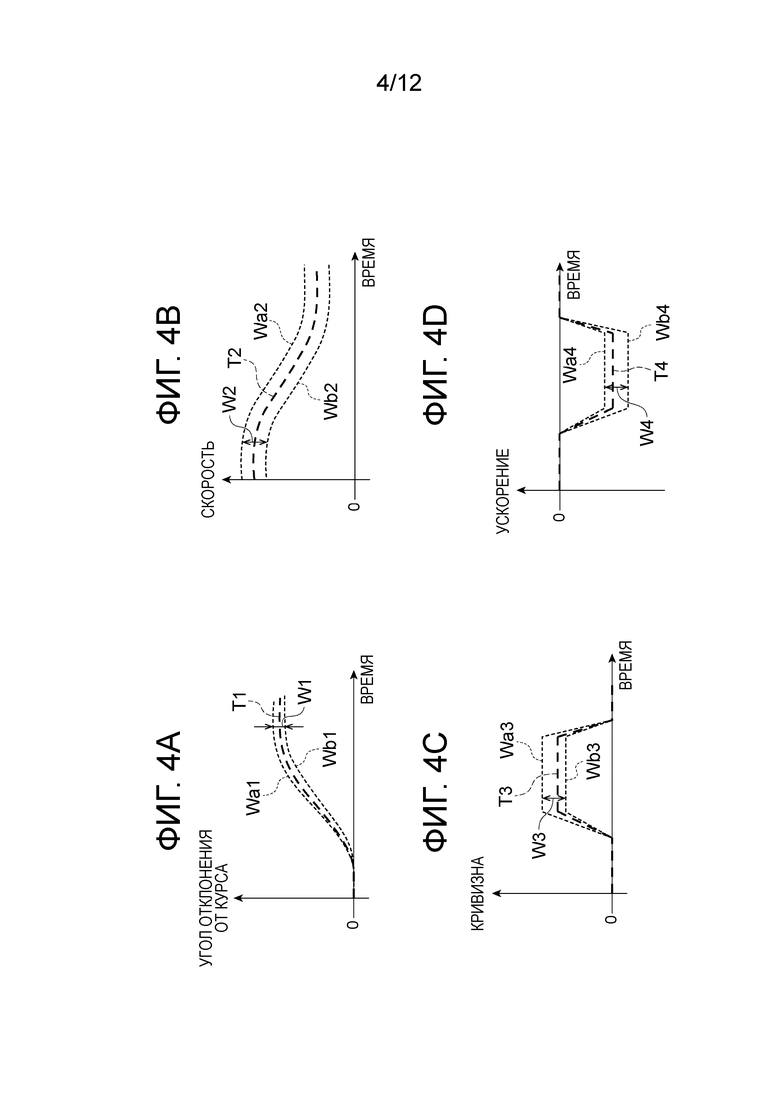
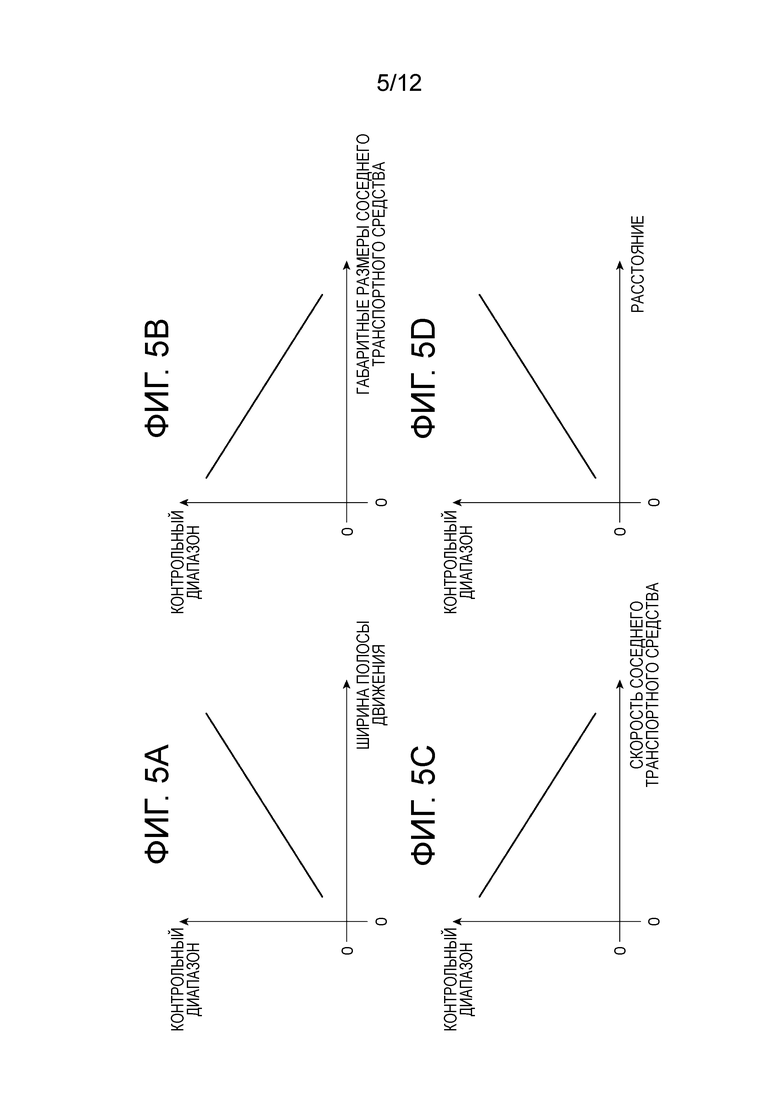
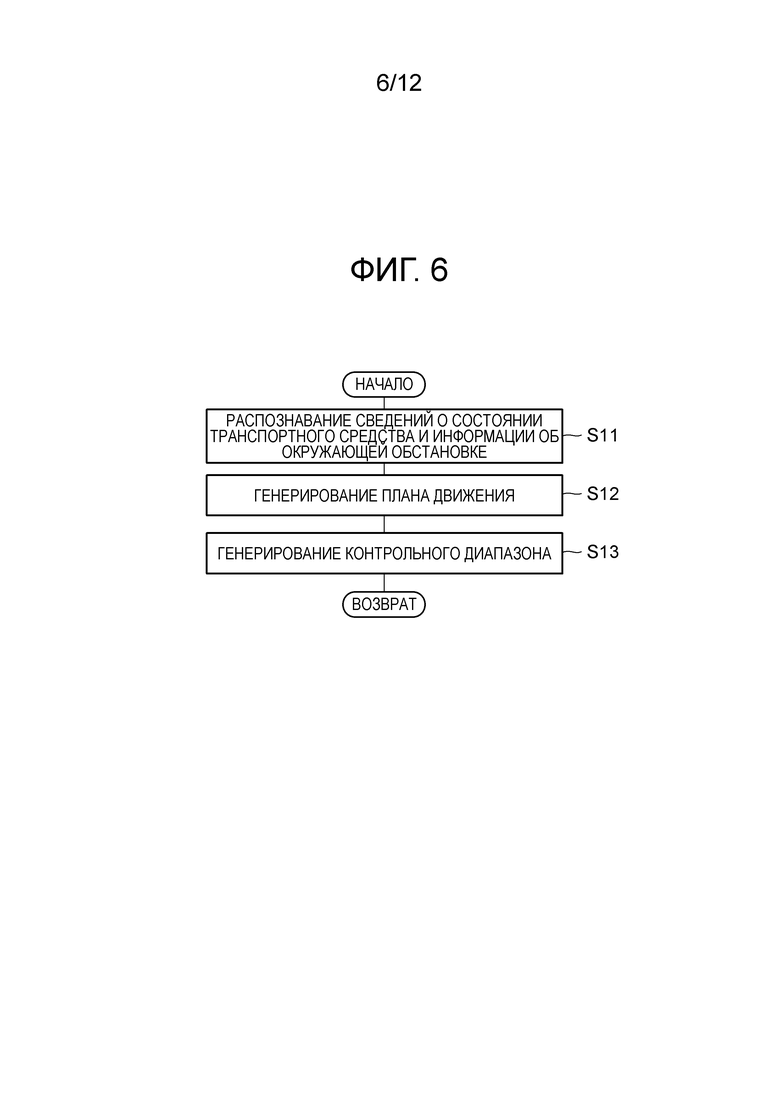
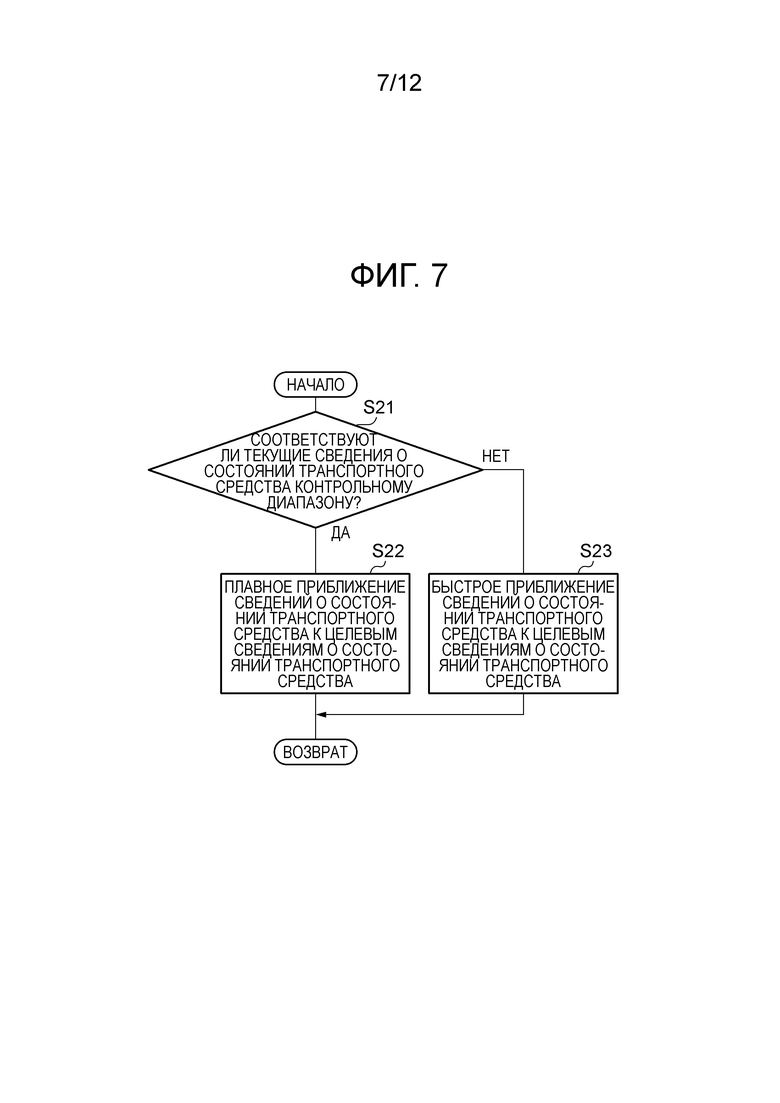
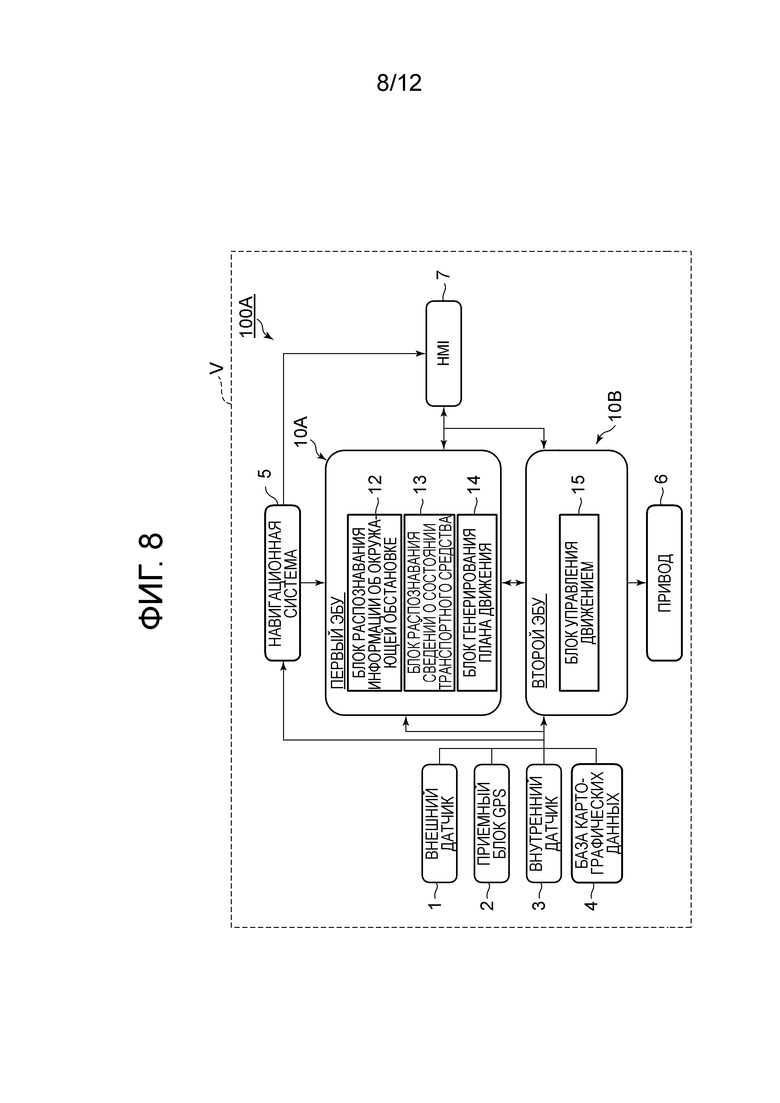
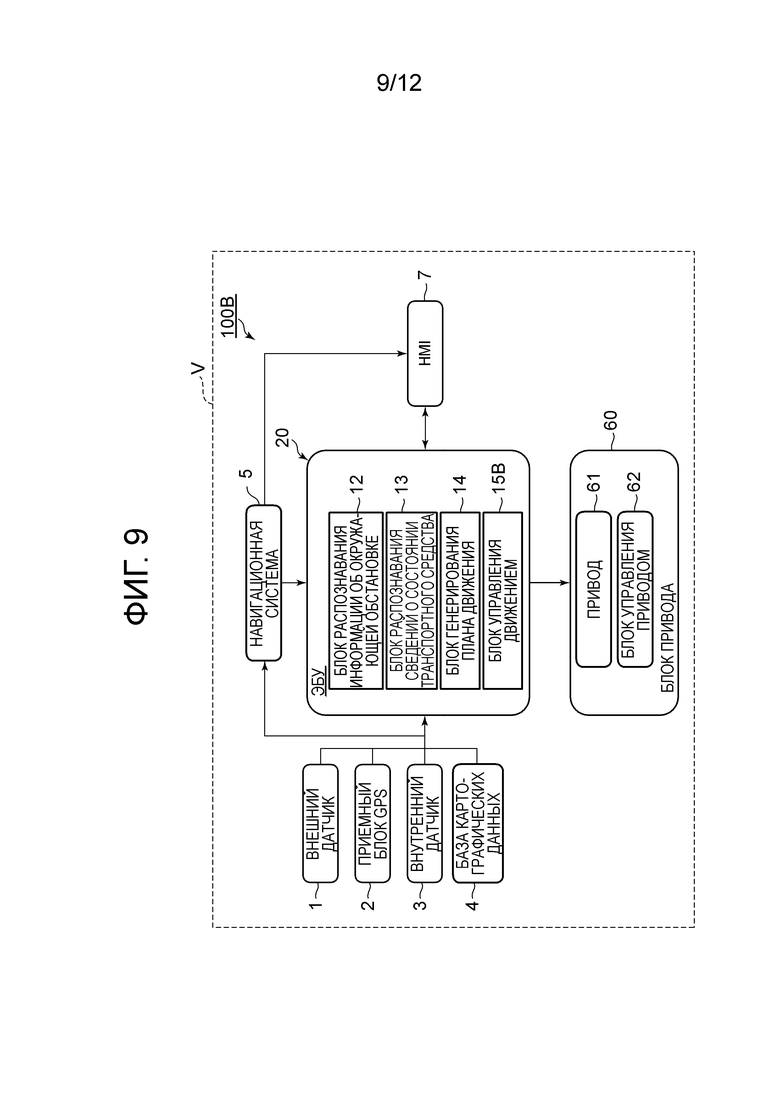
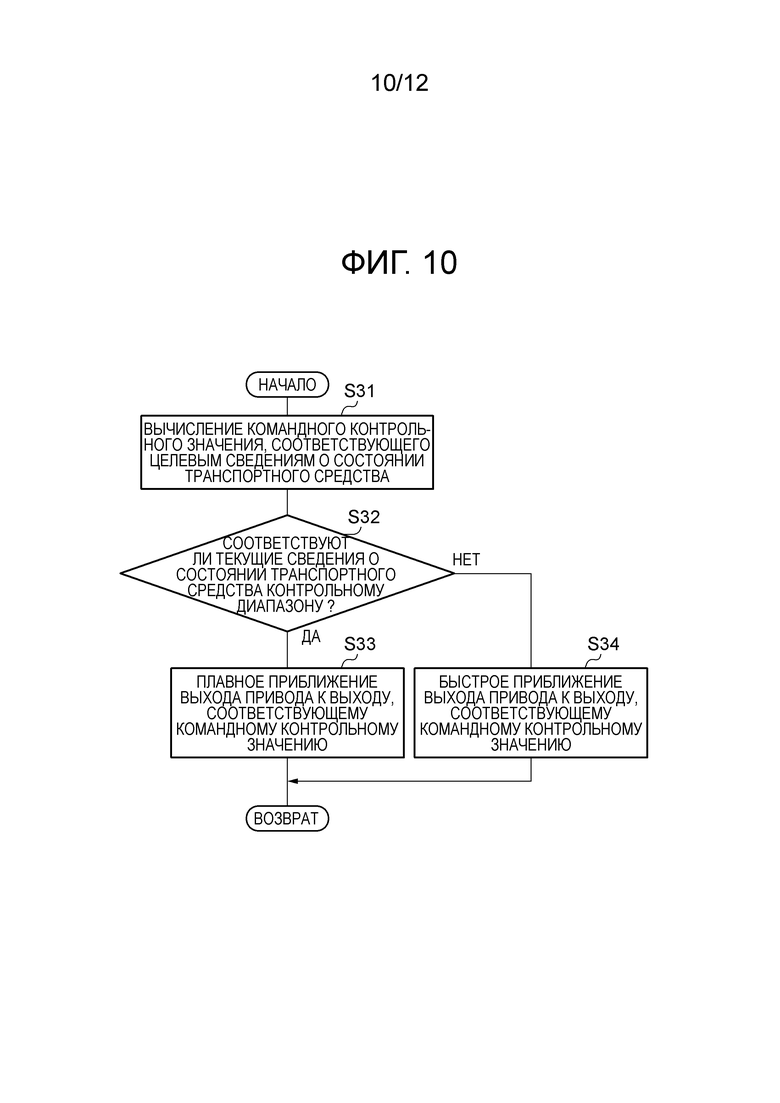
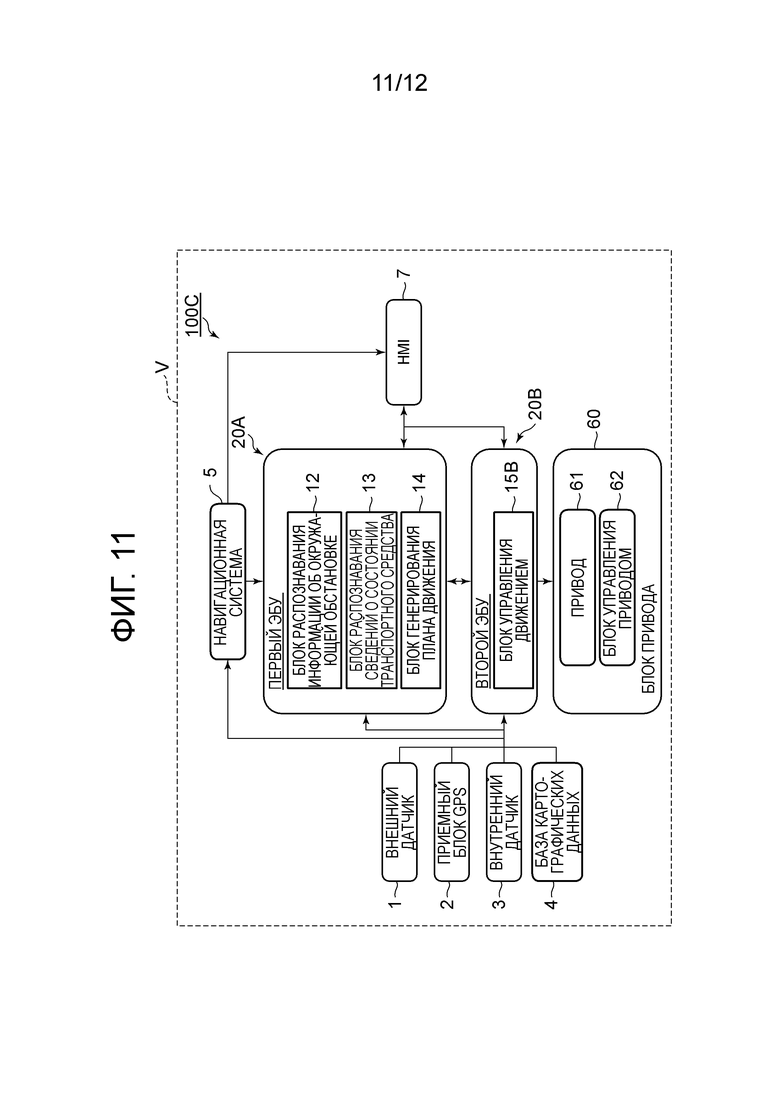
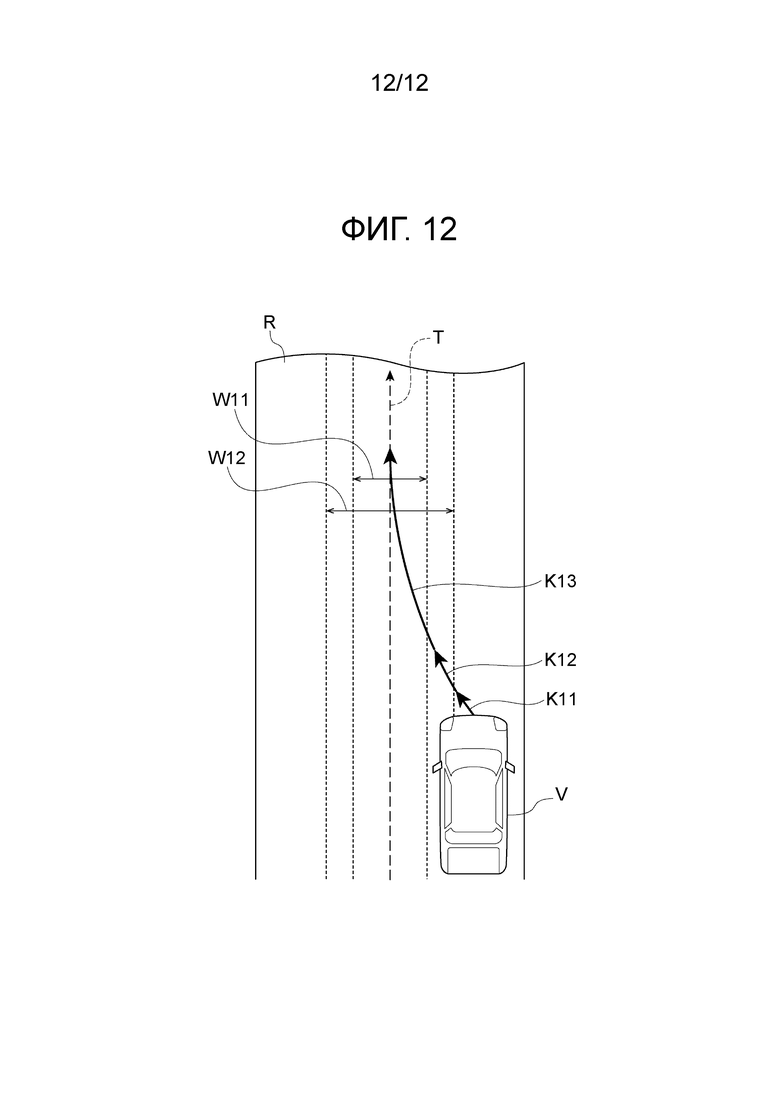
Изобретение относится к системе автоматического управления транспортным средством. Система автоматического управления транспортным средством содержит 4 блока и привод. Блок (12) распознавания информации об окружающей обстановке распознает информацию об окружающей обстановке транспортного средства. Блок (13) распознавания сведений о состоянии транспортного средства распознает сведения о состоянии транспортного средства. Блок (14) генерирования плана движения генерирует план движения, включая целевое контрольное значения, которое является целью для управления сведениями о состоянии транспортного средства, на основе информации об окружающей обстановке транспортного средства. Также блок генерирует контрольный диапазон целевого контрольного значения для транспортного средства в плане движения на основе по меньшей мере либо сведений о состоянии транспортного средства, либо информации об окружающей обстановке. Первый вычислительный блок (15) вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства становились эквивалентными целевым сведениям о состоянии транспортного средства, соответствующим целевому контрольному значению, на основе плана движения, сведениям о состоянии транспортного средства и контрольному диапазону. Привод (6) управляет движением транспортного средства на основе командного контрольного значения. Техническим результатом является быстрое приближение сведений о состоянии транспортного средства к целевым сведениям о состоянии транспортного средства в плане движения в случае, когда сведения о состоянии транспортного средства значительно отклоняются от плана движения, а также повышение плавности движения в случае, когда сведения о состоянии транспортного средства незначительно отклоняются от плана движения. 2 н. и 4 з.п. ф-лы, 12 ил.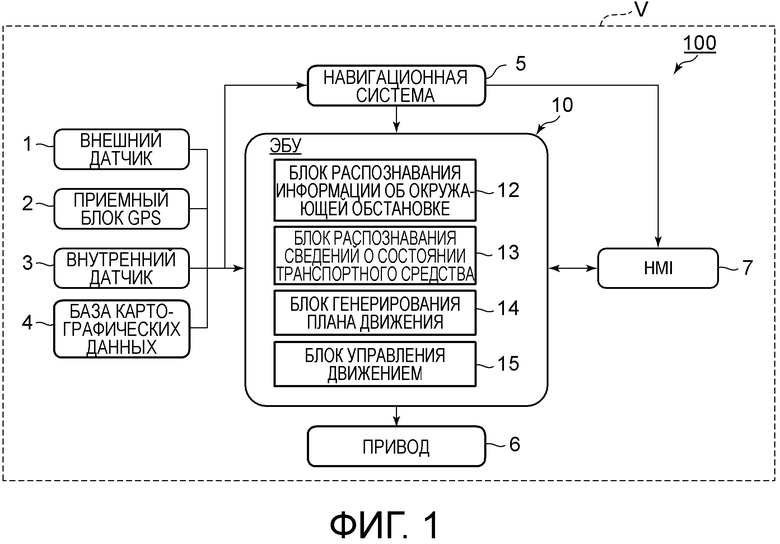
1. Система автоматического управления транспортным средством, содержащая:
блок (12) распознавания информации об окружающей обстановке, который распознает информацию об окружающей обстановке транспортного средства;
блок (13) распознавания сведений о состоянии транспортного средства, который распознает сведения о состоянии транспортного средства;
блок (14) генерирования плана движения, который генерирует план движения, включая целевое контрольное значение, которое является целью для управления сведениями о состоянии транспортного средства, на основе информации об окружающей обстановке транспортного средства и который генерирует контрольный диапазон целевого контрольного значения для транспортного средства в плане движения на основе сведений о состоянии транспортного средства и/или информации об окружающей обстановке;
первый вычислительный блок (15), который вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства становились целевыми сведениями о состоянии транспортного средства, соответствующими целевому контрольному значению, на основе плана движения, сведений о состоянии транспортного средства и контрольного диапазона; и
привод (6), который управляет движением транспортного средства на основе командного контрольного значения.
2. Система автоматического управления транспортным средством по п. 1, в которой в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону, первый вычислительный блок (15) вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства более плавно приближались к целевым сведениям о состоянии транспортного средства по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону.
3. Система автоматического управления транспортным средством по п. 1 или 2, в которой блок (14) генерирования плана движения включен в первый ЭБУ (10А), а первый вычислительный блок (15) включен во второй ЭБУ (10B), который отличается от первого ЭБУ.
4. Система автоматического управления транспортным средством, содержащая:
блок (12) распознавания информации об окружающей обстановке, который распознает информацию об окружающей обстановке транспортного средства;
блок (13) распознавания сведений о состоянии транспортного средства, который распознает сведения о состоянии транспортного средства;
блок (14) генерирования плана движения, который генерирует план движения, включая целевое контрольное значение, которое является целью для управления сведениями о состоянии транспортного средства, на основе информации об окружающей обстановке транспортного средства и который генерирует контрольный диапазон целевого контрольного значения для транспортного средства в плане движения на основе сведений о состоянии транспортного средства и/или информации об окружающей обстановке;
второй вычислительный блок (15B), который вычисляет командное контрольное значение таким образом, чтобы сведения о состоянии транспортного средства становились целевым сведениям о состоянии транспортного средства, соответствующими целевому контрольному значению, на основе плана движения;
привод (61), который управляет движением транспортного средства посредством выхода, соответствующего командному контрольному значению; и
блок (62) управления приводом, который управляет параметром для привода (61) на основе сведений о состоянии транспортного средства и контрольного диапазона.
5. Система автоматического управления транспортным средством по п. 4, в которой в случае, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, соответствующими контрольному диапазону, блок (62) управления приводом изменяет параметр таким образом, чтобы текущий выход привода (61) более плавно приближался к выходу, соответствующему командному контрольному значению, по сравнению со случаем, когда текущие сведения о состоянии транспортного средства являются сведениями о состоянии транспортного средства, не соответствующими контрольному диапазону.
6. Система автоматического управления транспортным средством по п. 4 или 5, в которой блок (14) генерирования плана движения включен в первый ЭБУ (20А), а второй вычислительный блок (15B) включен во второй ЭБУ (20B), который отличается от первого ЭБУ (20А).
| US 20120323473 A1, 20.12.2012 | |||
| US 20100228420 A1, 09.09.2010 | |||
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ АВТОМОБИЛЯ В АВАРИЙНЫХ СИТУАЦИЯХ | 1991 |
|
RU2006385C1 |

