Область техники, к которой относится изобретение
Изобретение относится к способам вычисления вероятного положения структур в земной коре.
Изобретение может включать в себя уточнение структурной модели посредством объединения интерпретированной структурной информации на основе внутрискважинного глубинного азимутального каротажа сопротивления (с большим радиусом исследования) или других внутрискважинных измерений вокруг ствола скважины с интерпретированными сейсмическими и скважинными данными с соответствующими неопределенностями при помощи метода статистической оценки.
Уровень техники
В патенте Великобритании GB 2,467,687В раскрыт способ формирования геологической модели района Земли, который предусматривает предоставление сейсмических данных, включая неопределенность времени пробега сейсмических волн; предоставление модели сейсмических скоростей данного района, включая неопределенность значения скорости; выполнение построения методом воображаемых лучей по сейсмическим данным с использованием модели скоростей для определения трехмерных положений множества точек района; вычисление неопределенностей трехмерного положения по меньшей мере некоторых точек по неопределенности времени пробега, неопределенности значения скорости и неопределенности направления распространения луча; и объединение определенных положений с вычисленными неопределенностями для формирования геологической модели.
В заявке на патент Великобритании GB 2,486,877А раскрыт способ оценки качества данных о местоположении в геологической среде и данных о местоположении ствола скважины, включающий в себя следующие шаги: обеспечивают позиционную модель геологической среды района Земли, включая данные о местоположении в геологической среде; обеспечивают позиционную модель ствола скважины, включая данные о местоположении ствола скважины, полученные на основе точек пластопересечений (отбивок горизонтов) скважин в данном районе, при этом каждая отбивка горизонта скважины соответствует геологическому объекту, определенному путем измерения, произведенного в скважине; идентифицируют общие точки, каждая из которых содержит точку в позиционной модели геологической среды, соответствующую отбивке горизонта скважины из данных о местоположении ствола скважины; выводят уточненную модель района, корректируя по меньшей мере одно из данных о местоположении в геологической среде и данных о местоположении ствола скважины таким образом, чтобы каждая общая точка имела наиболее вероятное положение в позиционной модели геологической среды и данных о местоположении ствола скважины и имела локальное испытательное значение, представляющее неопределенность положения; выбирают некоторые, но не все общие точки и выводят первое испытательное значение по локальным испытательным значениям выбранных общих точек; обеспечивают первые предельные условия испытания для погрешности определения положения для выбранных общих точек; и сравнивают первое испытательное значение с первым предельным условием испытания для обеспечения первой оценки качества данных.
Раскрытие сущности изобретения
В изобретении предложен способ вычисления вероятного положения структур в некотором объеме земной коры, способ выполнения исследования, способ извлечения углеводородов из некоторого геологического района Земли и способ бурения ствола скважины в геологическом районе Земли, машиночитаемый носитель данных и компьютер с хранимой программой, как изложено в прилагаемой формуле изобретения.
Краткое описание чертежей
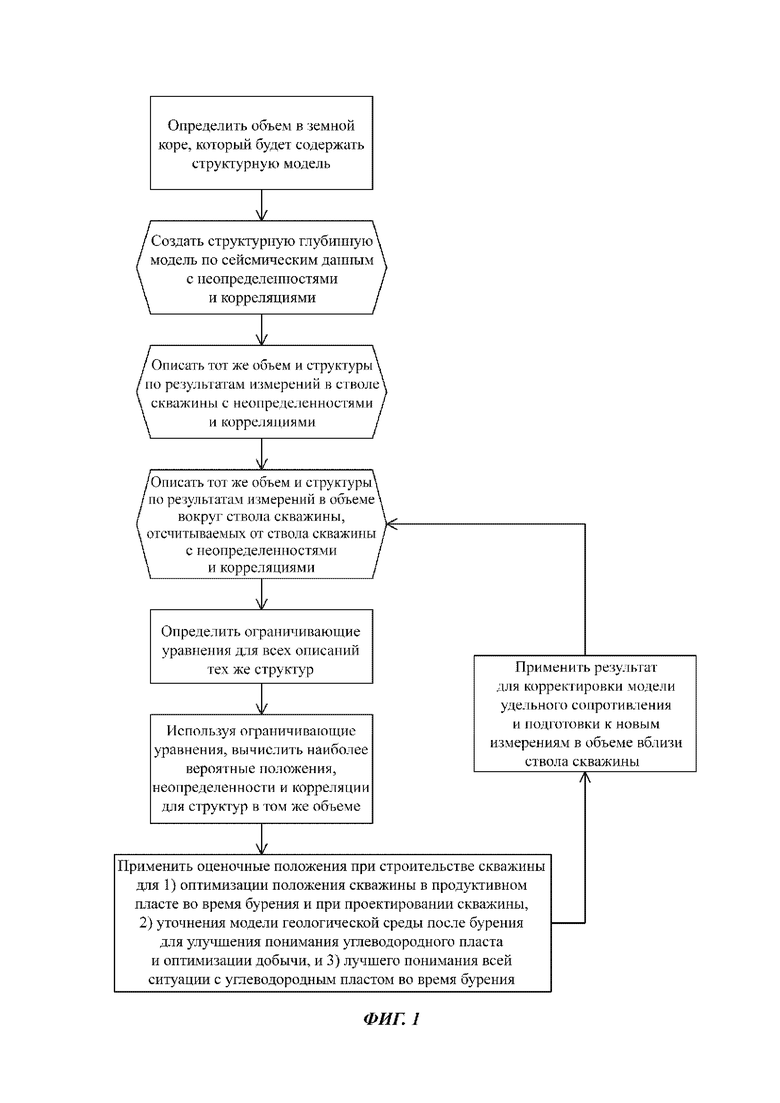
На Фиг. 1 раскрыта общая последовательность этапов способа в соответствии с изобретением.
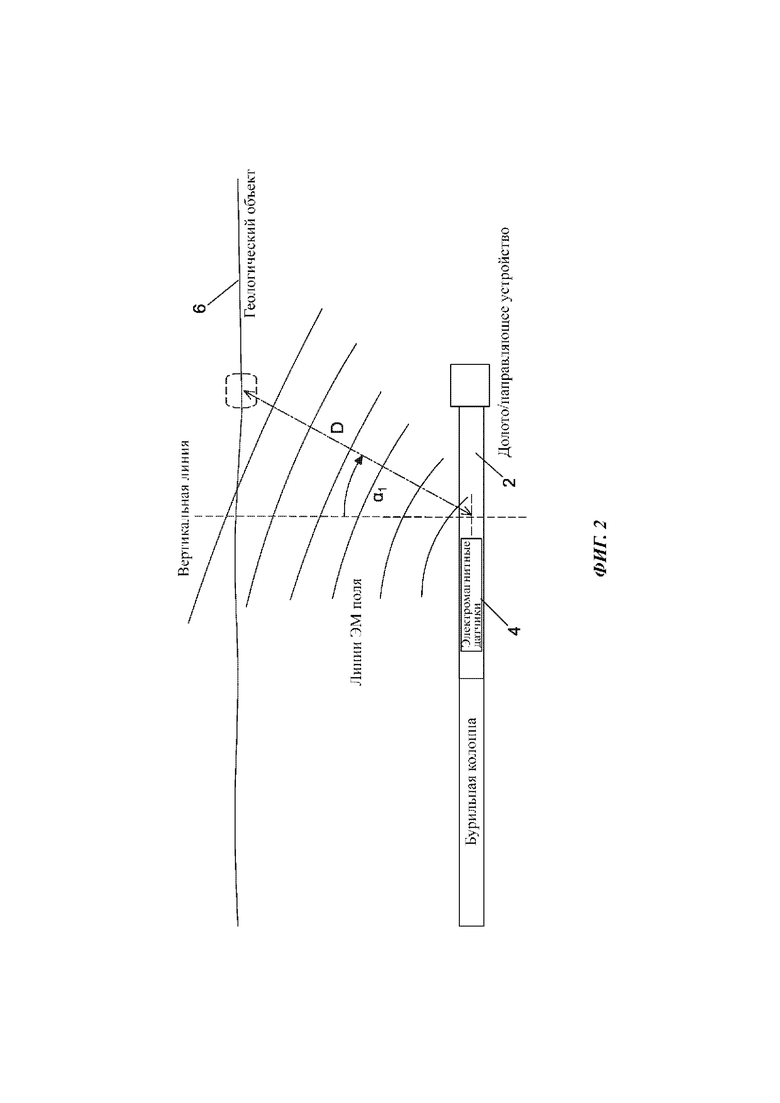
На Фиг. 2 показана компоновка низа бурильной колонны (КНБК) с электромагнитными датчиками, которые видны сбоку.
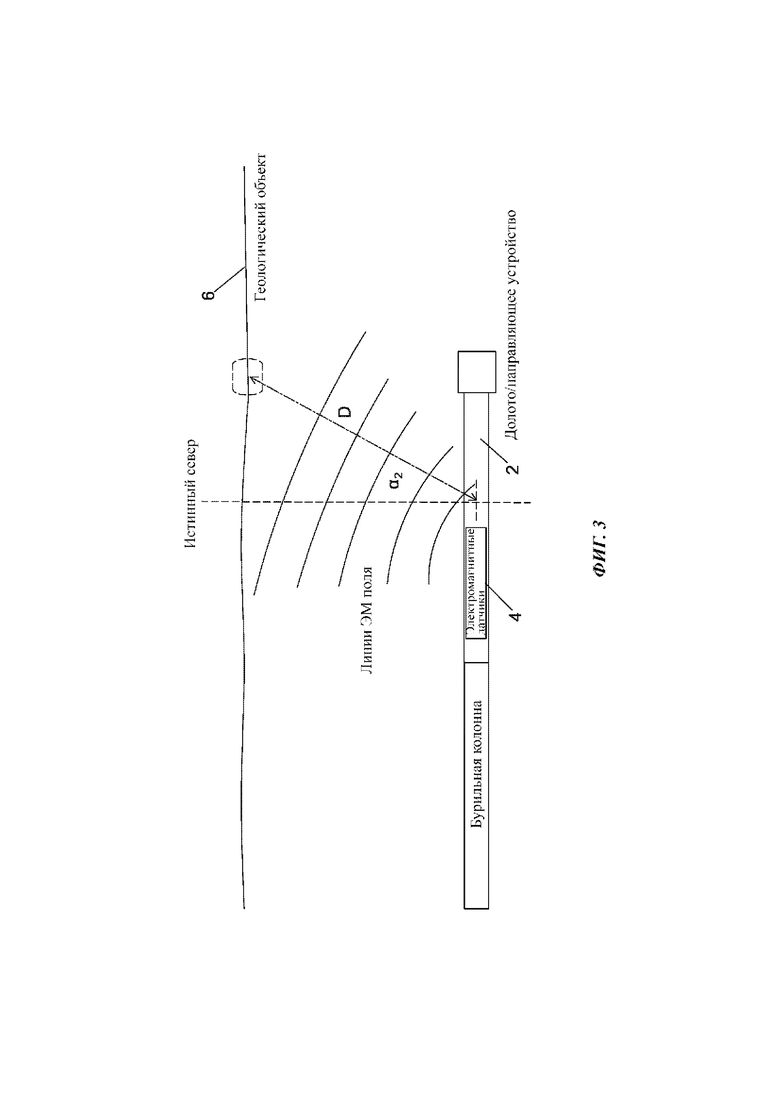
На Фиг. 3 показана та же ситуация, что на Фиг. 2, но при этом КНБК видна сверху в горизонтальной/поперечной плоскости (от вертикальной оси).
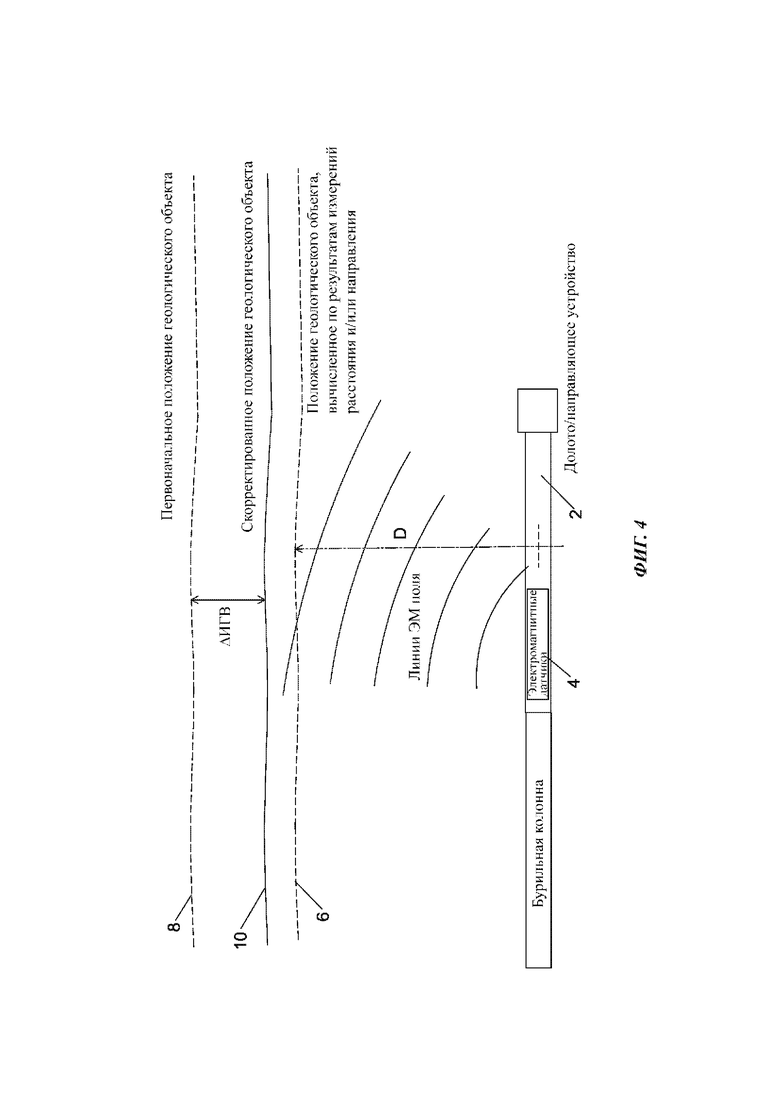
На Фиг. 4 показан пример, где электромагнитные датчики измеряют расстояние по вертикали до геологического объекта.
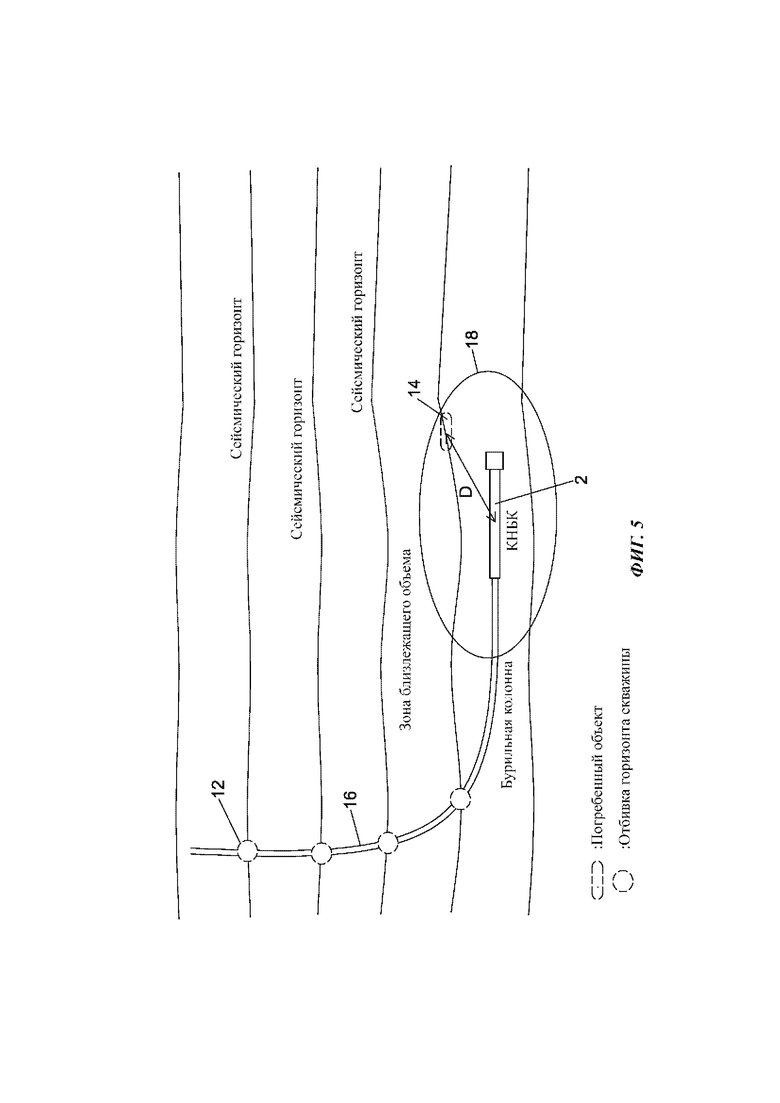
На Фиг. 5 показано определение точек пластопересечений (отбивок горизонтов) скважины и структур пласта.
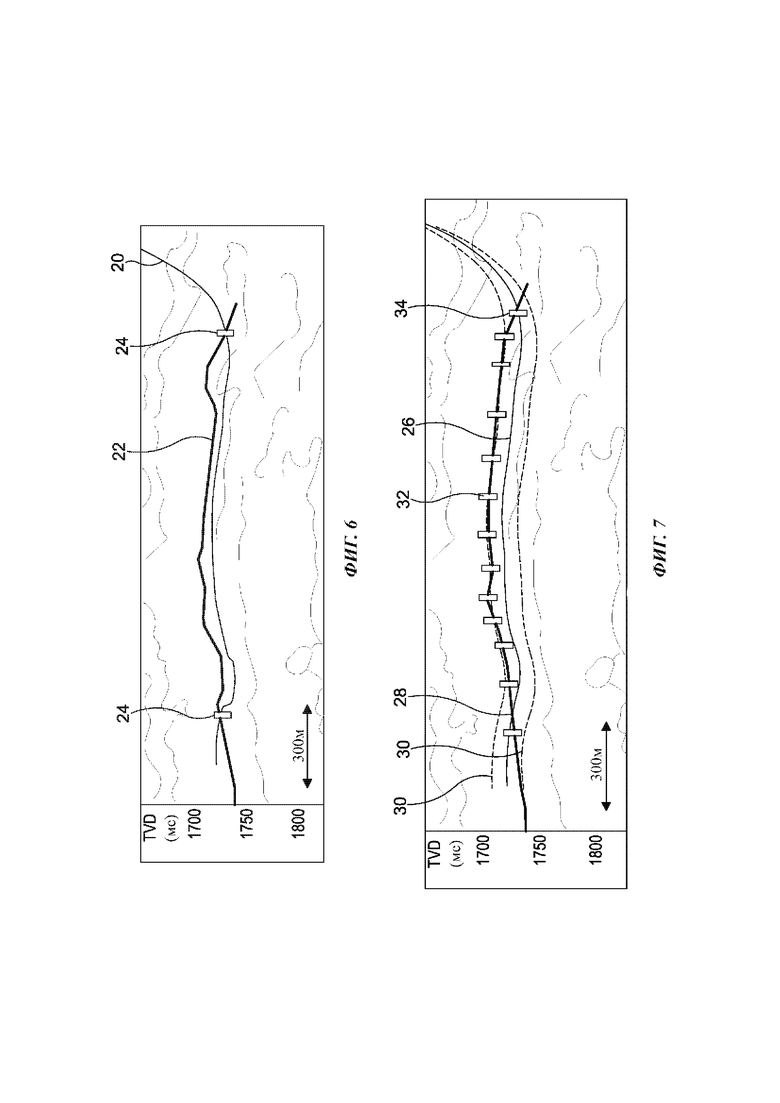
На Фиг. 6 показана ситуация 1 и представлен разрез сейсмических данных, где мы пробурили траекторию ствола скважины, показанную сплошной белой линией.
На Фиг. 7 показана ситуация 2 и представлен разрез сейсмических данных, где мы пробурили траекторию ствола скважины, показанную сплошной белой линией.
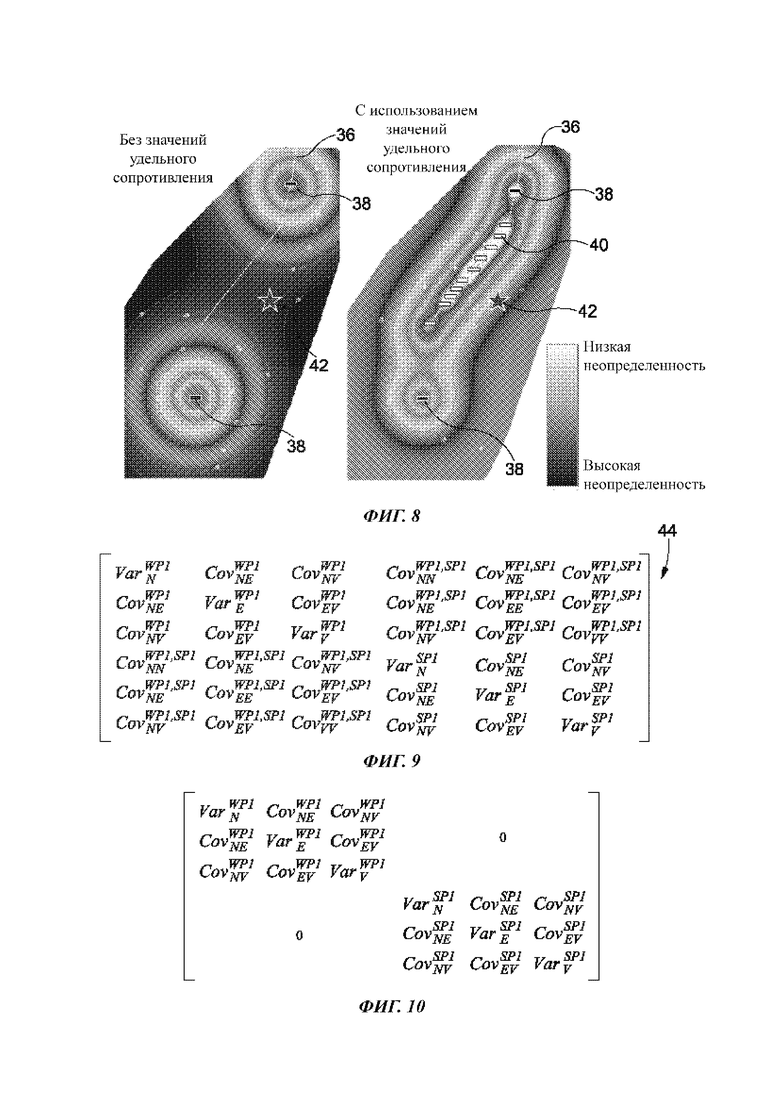
На Фиг. 8 показаны две карты неопределенностей, которые представляют неопределенность по глубине для кровли углеводородного пласта.
На Фиг. 9 показан пример ковариационной матрицы, составленной из двух точек, точки пластопересечения (отбивки горизонта) скважины и точки сейсмического воздействия.
На Фиг. 10 показан пример ковариационной матрицы, составленной из компонент двух статистических независимых точек.
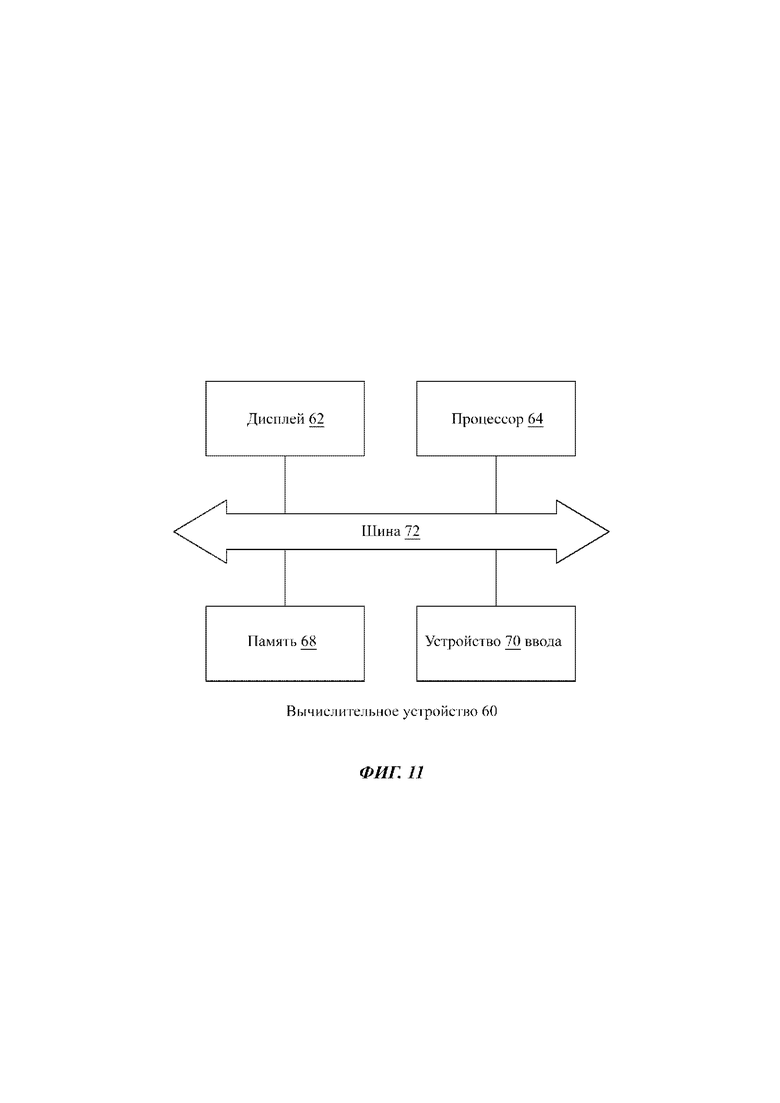
На Фиг. 11 показан эскизный чертеж компьютера, который может использоваться для выполнения способов в соответствии с настоящим изобретением.
Осуществление изобретения
Предпочтительные варианты осуществления будут теперь раскрыты только в качестве примера со ссылкой на прилагаемые чертежи.
Каждый признак, раскрытый или проиллюстрированный в настоящем описании, может быть включен в изобретение, самостоятельно или в любой соответствующей комбинации с любым другим признаком, раскрытым или проиллюстрированным в нем.
Отправным пунктом для раскрытых вариантов осуществления является то, что положение по меньшей мере одной точки в объеме геологической среды вокруг ствола скважины измеряют различными типами инструментов, помещенных вдоль компоновки низа бурильной колонны (КНБК) в стволе скважины. Примерами таких измерений являются глубинный азимутальный каротаж сопротивления, измерения удельного сопротивления перед долотом, акустические измерения и нейтронно-плотностный каротаж. Эти инструменты могут измерять скачки, например, удельного электрического сопротивления, которые могут соответствовать, например, водонефтяным контактам, кровле углеводородного пласта и границам раздела между различными типами пород. Кроме того, положения структур пласта в зоне геологической среды, перекрывающих ствол скважины, измеряют посредством сейсмической разведки. Структуры пласта, в которых пробурена скважина, измеряют и интерпретируют, и могут также быть измерены для других стволов скважин в зоне геологической среды. Эти измерения называются «отбивками горизонтов скважины».
Таким образом, могут применяться по меньшей мере три типа измерений, а именно внутрискважинные измерения вокруг ствола скважины, внескважинные сейсмические измерения и отбивки горизонтов скважины.
Отбивки горизонтов скважины, погребенные объекты и измерения в близлежащем объеме вокруг ствола скважины показаны на Фиг. 5. Точку пластопересечения (отбивку горизонта) скважины идентифицируют в процессе каротажа при прохождении слоя (горизонта) компоновкой КНБК. Этой отбивке горизонта скважины присваивают абсолютное положение скважины (измеренное инклинометром при скважинных измерениях в процессе бурения (ИПБ)). Погребенный объект представляет собой структуру, которая может быть, например, геологической формацией, разломом, структурной поверхностью или межфлюидным контактом, или любой граничной поверхностью или линией между двумя последовательными сейсмическими горизонтами, и идентифицируется в пределах ограниченного объема вокруг КНБК в стволе скважины. Направление и расстояние от КНБК до погребенного объекта вычисляют по результатам измерений в близлежащем объеме вокруг ствола скважины, выполняемых различными датчиками в КНБК.
Модель скоростей акустической волны описывает скорость распространения сейсмической волны в геологической среде, которая может использоваться в качестве коэффициента масштабирования для получения данных о времени, выведенных из сейсмических данных, и масштабирования их на глубину.
Предположим, что у нас имеется модель скоростей акустической волны, доступная для структур пласта в зоне геологической среды. Скорости можно получать с использованием соотношения между временем и глубиной (V=D/T) с глубиной (D) в качестве геологических наблюдений за скважиной и временем (Т) в качестве интерпретации сейсмических данных. Предположим, что у нас имеется сейсмическая глубинная модель. Глубинная модель раскрывает конечные результаты после преобразования времени, выведенного из сейсмических данных о геологической среде с использованием модели скоростей акустической волны, в оценочную глубину сейсмических данных о геологической среде. Глубинная модель представляет собой совокупность координат и соответствующих неопределенностей структур геологической среды. Предположим, что у нас также имеются в наличии результаты измерений в объеме вокруг ствола скважины наряду с неопределенностями этих результатов измерений, и отбивки горизонтов скважины с неопределенностями в трех пространственных измерениях. Неопределенности (статистические свойства) каждой пространственной точки в глубинной модели представлены ковариационной матрицей. Ковариационная матрица состоит из дисперсий на диагональных элементах и ковариаций на недиагональных элементах. Ковариации описывают статистические зависимости между координатами. Аналогичным образом, статистические зависимости между координатами пространственных точек (представляющих собой точку сейсмического воздействия, отбивку горизонта скважины или точку, измеренную в объеме вокруг ствола скважины) выражены в терминах ковариаций объединенной ковариационной матрицы. На Фиг. 9 показан пример такой объединенной ковариационной матрицы для двух пространственных точек, в данном случае, отбивки горизонта скважины и точки сейсмического воздействия.
Сделаем сначала несколько замечаний, касающихся инклинометрических измерений ствола скважины. Основными результатами измерений являются длина вдоль ствола скважины от точки привязки на поверхности и два компонента направления, называемых наклоном и азимутом. Наклоном называют отклонение оси ствола скважины относительно вектора поля силы тяжести, тогда как азимут представляет собой направление в плоскости горизонта относительно севера. Общепринятый способ измерения направления ствола скважины состоит в использовании магнитометрического геодезического инструмента (инклинометра) при скважинных измерениях в процессе бурения. Такой инструмент состоит из акселерометров и магнитометров, измеряющих компоненты поля сил тяжести Земли и магнитного поля Земли соответственно. Измерения с помощью акселерометров применяются для определения наклона ствола скважины, тогда как азимут определяют по результатам измерений с помощью магнитометров. Положение ствола скважины является функцией наклона, азимута и длины бурильной колонны от точки привязки на поверхности.
Новый аспект вариантов осуществления состоит в уточнении глубинной модели и соответствующей полной ковариационной матрицы при помощи интерпретированной структурной информации вплоть до результатов измерения направления и расстояния в трехмерном пространстве (и соответствующих статистических свойств) в близлежащем объеме вокруг ствола скважины, таких как результаты измерения удельного сопротивления. Измерение точки в близлежащем объеме вокруг ствола скважины при помощи датчиков в КНБК изображено на Фиг. 5. Неопределенности измерений в близлежащем объеме могут предусматриваться до бурения на основе моделей ошибок, относящихся к конкретным датчикам, или оцениваться в качестве побочного результата оценки методом наименьших квадратов.
Начнем с идентификации одной или более точек измерения в близлежащем объеме вокруг ствола скважины, которые соответствуют одному или более погребенным объектам в глубинной модели. Точки могут, например, интерпретироваться по изображению, отражающему удельное электрическое сопротивление объема, окружающего зонд. Этим точкам может быть присвоено до трех пространственных координат. Координаты такой точки оценивают при помощи измерений ствола скважины в качестве эталонных в сочетании с моделью удельного сопротивления для нахождения относительного расстояния и направления от точки привязки к скважине (определяемой вышеупомянутыми измерениями ствола скважины) до интерпретируемой точки (соответствующей погребенному объекту). Каждой такой точке должны быть присвоены статистические свойства, отраженные в точечной ковариационной матрице. Эта ковариационная матрица может быть получена путем применения закона распространения ковариации по трем доступным типам позиционной информации (информации о положении): измерениям ствола скважины, модели удельного сопротивления и интерпретации погребенного объекта по модели удельного сопротивления. Измерения в объеме вокруг ствола скважины могут представлять собой совокупность точек, напоминающую линию или поверхность. В такой совокупности точек каждая точка потенциально коррелировала бы со всеми остальными точками. Корреляция между точками может моделироваться объединенной ковариационной матрицей для всех последовательных точек в близлежащем объеме вокруг ствола скважины. Эта объединенная ковариационная матрица может быть получена путем применения закона распространения ковариации по трем доступным типам позиционной информации, раскрытым выше.
Вся доступная позиционная информация (такая как координаты отбивок горизонтов скважины, координаты точек сейсмического воздействия, координаты точек привязки к скважине и измерения в близлежащем объеме вокруг ствола скважины) может быть статистически взаимозависимой. Такие типы корреляций могут быть выражены ковариационными компонентами в объединенной ковариационной матрице. Эта объединенная ковариационная матрица может быть получена путем применения закона распространения ковариации по трем доступным типам позиционной информации, раскрытым выше.
Измеряемые точки в близлежащем объеме вокруг ствола скважины и отбивки горизонтов скважины могут быть привязаны к сейсмической глубинной модели при помощи ограничивающих уравнений. Ограничивающее уравнение выражает математически, как связаны координаты точек, например, то, что координаты точки, отсчитываемые от ствола скважины (представляющей собой отбивку горизонта скважины или измерение в близлежащем объеме), равны или отличаются с некоторым определенным расстоянием от соответствующей точки в сейсмической глубинной модели. Наиболее вероятные положения всех точек в глубинной модели с соответствующими статистическими свойствами (которые могут быть выражены ковариационной матрицей) вычисляют на основе этой информации об избыточных измерениях (используя, например, оценку методом наименьших квадратов, такая как раскрыта в патенте ЕР1306694 Торгейром Торкильдсеном (Torgeir Torkildsen)). Для этой цели может применяться оценка методом наименьших квадратов. Таким образом предшествующую позиционную информацию правильно корректируют на основе предшествующих позиционных статистических свойств.
Процедура привязывания точек, отсчитываемых от ствола скважины, к сейсмической глубинной модели, может быть обобщена в виде следующих этапов.
1. Собирают предшествующую позиционную информацию, включая предшествующие ковариационные матрицы.
2. Задают ограничивающие уравнения для связывания в единое целое позиционной информации.
3. Корректируют позиционную информацию и объединенную ковариационную матрицу при помощи введения ограничивающих уравнений и метода наименьших квадратов.
Результатом является глубинная модель со статистическими свойствами, которые правильно скорректированы на основе всей доступной позиционной информации с соответствующими статистическими свойствами. Этот результат может применяться для корректировки модели удельного сопротивления и подготовки к новым измерениям в близлежащем объеме вокруг ствола скважины. Общая последовательность выполняемых действий, раскрывающая предпочтительный вариант осуществления, показана на Фиг. 1. Новый элемент в виде включения результатов измерений с соответствующими неопределенностями и корреляциями из объема, окружающего ствол скважины, отсчитываемых от ствола скважины, с глубинным азимутальным каротажем сопротивления (с большим радиусом исследования) в качестве примера, раскрыт на нижеследующих чертежах.
На Фиг. 2 показана компоновка 2 низа бурильной колонны (КНБК) с электромагнитными датчиками 4, которые видны сбоку. При отсчете расстояния от нескольких дискретных положений (точек замера) вдоль траектории ствола скважины, положение геологического объекта 6 может быть вычислено с использованием, например, методов трилатерации. Когда, помимо измерения расстояний, доступны также измерения по направлениям, могут применяться методы уравнивания трехмерной триангуляции. На чертеже показан пример, в котором комплект 4 электромагнитных датчиков измеряет 3D-расстояние и 3D-направление до некоторого геологического объекта 6 (поверхности горизонта и т.д.). По результатам этих измерений определяют положение геологического объекта 6 в трехмерном пространстве. Положение геологического объекта 6 в трехмерном пространстве может быть вычислено относительно локальной системы координат на основе КНБК, или представлено северным положением в координатах, восточным положением в координатах и истинной глубиной по вертикали (ИГВ).
Используя акселерометры и магнетометры в съемочном комплекте для измерений в процессе бурения (ИПБ), можно определить ориентацию КНБК (включая комплект электромагнитных датчиков) относительно глобальной системы координат «северное положение, восточное положение и ИГВ». Потом можно будет выполнить преобразование между координатами в локальной системе координат на основе КНБК и глобальной системе координат «северное положение, восточное положение и ИГВ».
На Фиг. 3 показана та же ситуация, что на Фиг. 2, но при этом КНБК 2 видна в горизонтальной/поперечной плоскости (от вертикальной оси).
На Фиг. 4 показан пример, в котором электромагнитные датчики 4 измеряют расстояние по вертикали до геологического объекта 6. Тот же геологический объект (показанный штриховой линией 8) также определяют на основе только сейсмических данных. Эта поверхность имеет высокую неопределенность вследствие относительно низкой точности сейсмических данных. Измеренное расстояние (D) связывает вертикальное положение КНБК 2 и вертикальное положение геологического объекта 6. Точность измеренного расстояния определяет строгость этого ограничения. Поскольку положение КНБК 2 обладает значительно большей точностью, чем начальное положение геологического объекта 8 (определяемое с использованием предшествующих значений времени и скорости, вводимых в модель), скорректированное вертикальное положение поверхности (сплошная линия 10) окажется ближе к начальному положению по вертикали геологического объекта 6, которое было первоначально измерено при помощи электромагнитного прибора 4. Результатом является скорректированная геологическая поверхность с повышенной точностью ИГВ.
Подходящими вариантам программного обеспечения для данного применения являются следующие:
- программное обеспечение для обработки данных об удельном сопротивлении и представления имиджей сопротивления для интерпретации. Примерами служат прибор AziTrak™ глубинного азимутального каротажа сопротивления от компании Baker Hughes, обеспечивающий возможность направленного бурения, и программное обеспечение EMLA для электромагнитной прогнозной оценки, разработанное компаниями Schlumberger и Statoil;
- программное обеспечение для построения геологических моделей, такое как Landmark DecisionSpace Desktop и Petrel от компании Schlumberger;
- инструменты преобразования глубины по данным сейсмической съемки, такие как Paradigm Explorer, COHIBA от компании Roxar, и EasyDC;
- программный инструмент Landmark Compass для оценки неопределенности положения траектории ствола скважины;
- PinPoint (Statoil, внутреннее).
Ниже описаны варианты применения раскрытых способов.
Уточненную структурную модель можно применять для оптимизации положения бурового долота в продуктивном пласте (т.е. области, которая дает углеводороды) в ситуации скважинных измерений во время бурения. Эту модель можно уточнять в реальном времени, используя новые данные, собранные во время бурения. Модель можно уточнять посредством рекурсивной (например, методом наименьших квадратов) оценки, например, чтобы сэкономить время вычислений. Если модель уточняют посредством рекурсивной оценки, вклады новых результатов измерений в предшествующие положения структур вычисляют с использованием, например, фильтрации Калмана или аналогичных подходов к рекурсивной оценке. Кроме того, уточненная модель может применяться на этапе проектирования скважины для новых скважин в этой области, чтобы обеспечить для них более оптимальные варианты размещения траектории скважины. Наконец, уточненная модель может быть применена после бурения для улучшения понимания ситуации в пласте вокруг скважины для оптимизации добычи на этапе добычи.
На Фиг. 5 показано определение отбивок 12 горизонтов скважины, погребенные объекты 14 и измерения в близлежащем объеме вокруг ствола скважины. Отбивку 12 горизонта скважины идентифицируют в процессе каротажа при прохождении горизонта компоновкой КНБК 2. Отбивке 12 горизонта скважины присваивают абсолютное положение скважины 16 (измеренное инклинометром при скважинных измерениях в процессе бурения (ИПБ)). Погребенный объект 14 идентифицируют в пределах ограниченного объема 18 вокруг КНБК 2 в стволе 16 скважины. Направление и расстояние от КНБК 2 до погребенного объекта 14 вычисляют по результатам измерений в близлежащем объеме, выполняемых различными датчиками в КНБК 2, например, одним или более датчиками удельного сопротивления, распределенными вдоль КНБК 2.
На Фиг. 6 показана ситуация 1 и представлен разрез сейсмических данных, где мы пробурили траекторию 20 ствола скважины, показанную сплошной белой линией. Черная линия представляет сейсмический горизонт 22, представляющий собой интерпретацию сейсмических данных кровли углеводородного пласта. Мы не использовали каких-либо измерений удельного электрического сопротивления в этой ситуации, однако откалибровали сейсмический горизонт до отбивок горизонтов в пробуренной скважине, представленных черными маркерами 24. В этом примере имеет место значительная неопределенность в отношении геометрической формы и топографии кровли углеводородного пласта (черная линия) между маркерами 24 отбивок горизонтов скважины. Глубина кровли углеводородного пласта является неопределенной, и существует риск пропустить потенциальные объемы в случае необходимости забуривания нового ствола (бурения в боковом направлении траектории ствола скважины) или бурения другой скважины в данной зоне.
На Фиг. 7 показана ситуация 2 и представлен сейсмический разрез, где мы пробурили траекторию 26 ствола скважины, показанную белой линией, а интерпретация 28 сейсмических данных показана черной линией. Белые пунктирные линии 30 представляют теоретический диапазон глубин проникновения для глубинного электромагнитного каротажа сопротивления (+- 10 м). Белые маркеры 32 представляют обнаружение кровли продуктивной толщи на основе глубинного каротажа сопротивления. Черные маркеры 34 представляют отбивки горизонтов в пробуренной скважине. Мы откалибровали сейсмический горизонт 28 до белых маркеров 32 и черных маркеров 34. Все из маркеров, интерпретации и геофизического исследования скважины имеют сопутствующие неопределенности, которые объединяются алгебраическим способом, давая в результате актуализированное общее положение и неопределенность поверхности кровли продуктивной толщи. В этом примере мы получаем уточненную поверхность на глубине верха продуктивной толщи, которую можно использовать для оптимизации конструкции скважины в ситуации бурения, а также после бурения для ограничения объемов и оптимизации добычи.
На Фиг. 8 показаны две карты неопределенностей, которые представляют неопределенность по глубине для кровли углеводородного пласта. Пробуренная скважина представлена белой пунктирной линией 36. Черные маркеры 38 представляют наблюдения за геологической скважиной для кровли углеводородного пласта, а белые маркеры 40 представляют скважинные наблюдения глубинного удельного сопротивления для кровли углеводородного пласта. Чертеж слева может быть непосредственно сравним с ситуацией, показанной на Фиг. 6, где значения глубинного удельного сопротивления не использовались. Представим, что мы бурим новую скважину в целевом пласте, представленном черной звездочкой 42. Без использования каких-либо наблюдений глубинного удельного сопротивления мы получили бы неопределенность, составляющую +- 20 м при 2 среднеквадратических отклонениях.
Чертеж справа, далее, объединяет наблюдения за пробуренной геологической скважиной и скважинные наблюдения глубинного удельного сопротивления. Это соответствует ситуации, показанной на Фиг. 7. Теперь мы имеем оптимизированную поверхность, которая уменьшает неопределенности до 12 м при 2 среднеквадратических отклонениях в месте нахождения целевого пласта, обозначенном черной звездочкой 42.
На Фиг. 9 показан пример объединенной ковариационной матрицы 44 для двух точек в трехмерном пространстве, отбивки горизонта скважины (обозначенной как WP1 в матрице) и точки сейсмического воздействия (обозначенной как SP1 в матрице). Статистические зависимости между координатами отбивки горизонта скважины и координатами точки сейсмического воздействия описаны матрицами 3×3 в верхнем правом и нижнем левом углах соответственно. Матрицы 3×3 в верхнем правом и нижнем левом углах представляют собой ковариационные матрицы отбивки горизонта скважины и точки сейсмического воздействия соответственно. Диагональные элементы объединенной ковариационной матрицы представляют собой дисперсии координат отбивки горизонта скважины и точки сейсмического воздействия.
На Фиг. 10 показан пример, в котором отбивка горизонта скважины и точка сейсмического воздействия статистически независимы. Это выражено нулевыми ковариациями между координатами отбивки горизонта скважины и координатами точки сейсмического воздействия.
На Фиг. 11 показано вычислительное устройство 60, которое может, например, представлять собой персональный компьютер (ПК), служащий для выполнения способов, раскрытых в настоящем документе. Вычислительное устройство 60 содержит дисплей 62 для отображения информации, процессор 64, память 68 и устройство 70 ввода, позволяющее вводить информацию в вычислительное устройство. Устройство 70 ввода может, например, включать в себя канал связи с другими компьютерами или машиночитаемыми носителями данных, и может также включать в себя мышь или клавиатуру, позволяющие пользователю вводить информацию. Эти элементы соединены с шиной 72, по которой осуществляется обмен информацией между компонентами.
Следует понимать, что любые способы, раскрытые в настоящем документе, могут также включать в себя этап сбора данных, в том числе сейсмических и/или электромагнитных данных, которые могут затем обрабатываться в соответствии с этим способом.
Раскрытые в настоящем документе способы вычисления вероятного положения структур в районе земной коры могут использоваться в способе выполнения разведки, способе извлечения углеводородов из некоторого геологического района Земли, и способе бурения ствола скважины в некотором геологическом районе Земли. Инструкции для выполнения указанных способов, раскрытых в настоящем документе, могут храниться на машиночитаемом носителе данных, при этом указанные способы могут выполняться на компьютере с хранимой программой.
Изобретение относится к способам вычисления вероятного положения структур в земной коре. Предложен способ вычисления вероятных положений структур в некотором районе земной коры, в котором определяют указанный район в земной коре, создают первую структурную модель указанного района по сейсмическим данным с неопределенностями и корреляциями. Создают вторую структурную модель указанного района по результатам измерений в стволе скважины с неопределенностями и корреляциями. Создают третью структурную модель указанного района по результатам измерений в некотором объеме вокруг указанного ствола скважины, отсчитываемых от ствола скважины с неопределенностями и корреляциями. Определяют ограничивающие уравнения для указанных первой, второй и третьей структурных моделей и, используя указанные ограничивающие уравнения, вычисляют вероятные положения структур в указанном районе и вероятные неопределенности и корреляции, связанные с указанными положениями. Технический результат – повышение информативности и точности получаемых данных. 3 н. и 25 з.п. ф-лы, 11 ил.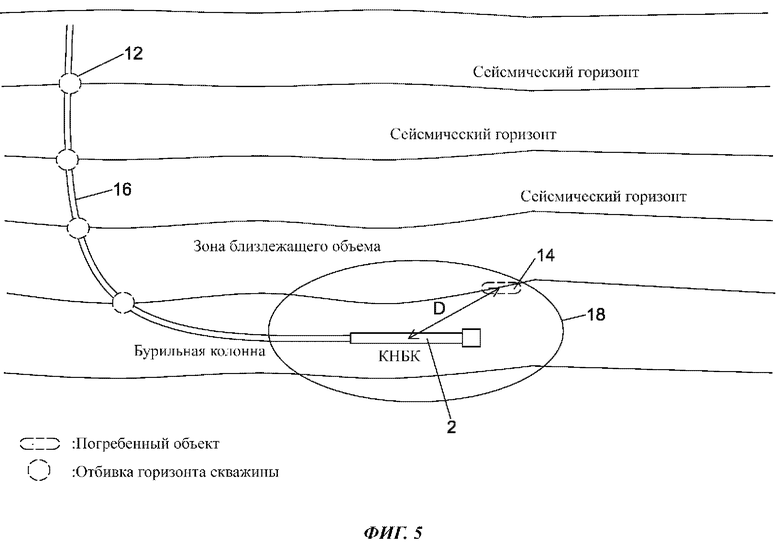
1. Способ выполнения разведки, в котором: проводят сейсмическую разведку для получения сейсмических данных с неопределенностями и корреляциями; выполняют измерения в стволе скважины с неопределенностями и корреляциями; выполняют измерения в объеме вокруг указанного ствола скважины, отсчитываемые от ствола скважины с неопределенностями и корреляциями; определяют объем в земной коре; создают первую структурную модель объема в земной коре по сейсмическим данным с неопределенностями и корреляциями; создают вторую структурную модель объема в земной коре по результатам измерений в стволе скважины с неопределенностями и корреляциями; создают третью структурную модель объема в земной коре по результатам измерений в объеме вокруг указанного ствола скважины; определяют ограничивающие уравнения для указанных первой, второй и третьей структурных моделей; и, используя указанные ограничивающие уравнения, определяют вероятные положения структур в объеме в земной коре и вероятные неопределенности и корреляции, связанные с указанными положениями.
2. Способ по п. 1, в котором указанные измерения в указанном объеме вокруг указанного ствола скважины включают в себя глубинный азимутальный каротаж сопротивления.
3. Способ по п. 1 или 2, в котором указанные измерения в указанном объеме вокруг указанного ствола скважины включают в себя измерения удельного сопротивления перед долотом.
4. Способ по любому предшествующему пункту, в котором указанные измерения в указанном объеме вокруг указанного ствола скважины включают в себя внутрискважинные акустические измерения.
5. Способ по любому предшествующему пункту, в котором указанные измерения в указанном объеме вокруг указанного ствола скважины включают в себя нейтронно-плотностный каротаж.
6. Способ по любому предшествующему пункту, в котором выполняют сейсмическую разведку района геологической среды, перекрывающего указанный объем в земной коре.
7. Способ по п. 6, в котором выполняют идентификацию по меньшей мере некоторых из указанных структур в рамках как указанной сейсмической разведки, так и указанных измерений в указанном объеме вокруг указанного ствола скважины и используют указанные структуры для определения указанных ограничивающих уравнений.
8. Способ по п. 6 или 7, в котором дополнительно создают модель скоростей акустической волны для указанного района геологической среды.
9. Способ по п. 8, в котором указанную модель скоростей акустической волны получают путем сравнения результатов сейсмических измерений с результатами позиционных измерений в пробуренных скважинах в указанном районе геологической среды.
10. Способ по п. 8 или 9, в котором дополнительно объединяют интерпретации указанных сейсмических структур во временной области с указанной моделью скоростей акустической волны, результатами указанных измерений в указанном объеме вокруг указанного ствола скважины и результатами указанных измерений в указанном стволе скважины.
11. Способ по п. 10, в котором дополнительно используют указанный этап объединения для оценки глубинной модели указанных структур при помощи полной ковариационной матрицы в трех пространственных измерениях.
12. Способ по п. 11, в котором: каждая из пространственных точек в указанной глубинной модели представлена тремя переменными в указанной ковариационной матрице; каждая из скоростей акустической волны в указанной модели скоростей акустической волны представлена переменной в указанной ковариационной матрице; и указанная ковариационная матрица описывает неопределенность между указанными переменными и корреляции между указанными переменными.
13. Способ по п. 11 или 12, в котором интерпретированные точки, соответствующие указанным структурам, отбивки горизонтов скважины по результатам указанных измерений в указанном стволе скважины и результаты указанных измерений за пределами указанного ствола скважины связывают при помощи ограничивающих уравнений для нахождения наиболее вероятных положений и соответствующих статистических свойств в указанной глубинной модели.
14. Способ по любому предшествующему пункту, в котором дополнительно: обеспечивают сейсмическую глубинную модель; и представляют статистические свойства каждой пространственной точки в указанной глубинной модели элементами ковариационной матрицы.
15. Способ по п. 14, в котором дополнительно: выражают при помощи ковариационных компонентов в объединенной ковариационной матрице статистические зависимости, существующие между по меньшей мере следующими координатами: координаты по меньшей мере одной отбивки горизонта скважины; координаты по меньшей мере одной точки сейсмического воздействия; и координаты по меньшей мере одной точки, измеренной в указанном объеме вокруг указанного ствола скважины.
16. Способ по п. 14 или 15, в котором указанную глубинную модель получают посредством объединения модели скоростей акустической волны с сейсмическими данными, интерпретируемыми во временной области.
17. Способ по пп. 14, 15 или 16, в котором дополнительно уточняют указанную глубинную модель и указанную ковариационную матрицу при помощи интерпретированной структурной информации, полученной по результатам указанных измерений в указанном объеме вокруг указанного ствола скважины.
18. Способ по любому из пп. 14–17, в котором указанные пространственные точки получают из указанных первой, второй и третьей структурных моделей.
19. Способ по любому из пп. 14–18, в котором дополнительно: создают модель удельного сопротивления для удельного сопротивления в объеме в земной коре; и используют указанную глубинную модель для корректировки указанной модели удельного сопротивления.
20. Способ по любому предшествующему пункту, в котором указанные измерения в объеме вокруг указанного ствола скважины представляют собой измерения земной коры за пределами указанного по меньшей мере одного ствола скважины.
21. Способ по любому предшествующему пункту, в котором указанные ограничивающие уравнения показывают, чем координаты точки в одной из указанных первой, второй или третьей структурных моделей отличаются от соответствующей точки в другой из указанных первой, второй или третьей структурных моделей.
22. Способ по п. 1, в котором указанный этап выполнения измерений в объеме вокруг указанного ствола скважины включает в себя использование одного или более измерительных инструментов, расположенных внутри указанного ствола скважины.
23. Способ извлечения углеводородов из некоторого района геологической среды Земли, в котором: бурят ствол скважины; выполняют разведку по п. 1; используют результаты указанной разведки для определения места присутствия углеводородов в указанном районе геологической среды Земли; и извлекают указанные углеводороды через указанный ствол скважины.
24. Способ бурения ствола скважины в некотором районе геологической среды Земли, в котором: начинают бурение ствола скважины; выполняют разведку по п. 1; используют результаты указанной разведки для определения требуемого положения ствола скважины в указанном районе геологической среды Земли; и продолжают бурение указанного ствола скважины в соответствии с указанным требуемым положением.
25. Способ бурения ствола скважины по п. 24, в котором указанные вероятные положения структур в указанном районе уточняют в реальном времени, используя новые данные, собранные во время бурения.
26. Способ бурения ствола скважины по п. 25, в котором указанные вероятные положения структур в указанном районе уточняют посредством рекурсивной оценки.
27. Способ бурения ствола скважины по п. 26, в котором вклад новых результатов измерений в предшествующие положения указанных структур вычисляют с использованием методов рекурсивной оценки.
28. Способ бурения ствола скважины по п. 27, в котором вклад новых результатов измерений в предшествующие положения указанных структур вычисляют с использованием фильтрации Калмана.
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕФТЕПРОДУКТИВНОСТИ ПОРИСТЫХ КОЛЛЕКТОРОВ В ТРЕХМЕРНОМ МЕЖСКВАЖИННОМ ПРОСТРАНСТВЕ | 2004 |
|
RU2253885C1 |
| US 20110098996 A1, 28.04.2011 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЙ ГЕОФИЗИЧЕСКИХ И ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ В ПРОЦЕССЕ БУРЕНИЯ С ЭЛЕКТРОМАГНИТНЫМ КАНАЛОМ СВЯЗИ | 2012 |
|
RU2513432C1 |
| СИСТЕМА ПЕТРОФИЗИЧЕСКОЙ ОЦЕНКИ В РЕАЛЬНОМ ВРЕМЕНИ | 2002 |
|
RU2315339C2 |
| US 20100326669 A1, 30.12.2010 | |||
| СПОСОБ ГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ ДЛЯ ОПРЕДЕЛЕНИЯ НЕФТЕГАЗОПРОДУКТИВНЫХ ТИПОВ ГЕОЛОГИЧЕСКОГО РАЗРЕЗА ПЕРЕМЕННОЙ ТОЛЩИНЫ | 2002 |
|
RU2205434C1 |
| КОМПРЕССОРНОЕ УСТРОЙСТВО ГАЗОВОЙ ТУРБИНЫ И КОРПУСНОЙ ЭЛЕМЕНТ КОМПРЕССОРА | 2005 |
|
RU2354852C2 |

