ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к спутникам и, в частности, к сервисным спутникам для технического обслуживания орбитальных спутников.
УРОВЕНЬ ТЕХНИКИ
Коммерческие телекоммуникационные спутники создают приблизительно 75% всего дохода космического сектора геостационарной околоземной орбиты (ГСО). Их срок службы составляет между 12 и 15 лет, и эти ограничения в большей степени накладываются количеством топлива, доступным для удержания заданной точки. Все бортовые системы могут быть выполнены с возможностью надлежащего функционирования в течение длительного времени, но без топлива спутник не может поддерживать свою расчетную орбиту - он сходит со своей расчетной орбиты и следовательно не может поддерживать требования к задаче обеспечения коммуникации. Нерабочий спутник, который остается в космосе, считается космическим мусором. Для смягчения проблемы накопления космического мусора, политика ООН требует, чтобы «в конце срока службы, геостационарный космический аппарат должен быть размещен на орбите захоронения, которая имеет перигей на по меньшей мере 300 км выше геостационарной орбиты». Федеральная комиссия по связи (FCC) приняла аналогичное требование в 2004 году. Чтобы соответствовать этим требованиям, когда остается относительно небольшое количество топлива, спутники используют остатки их топлива для удержания заданной точки, чтобы уйти с орбиты и часто жертвуют несколькими месяцами своего расчетного срока службы, что соответствует значительным потерям экономической стоимости.
Если бы были доступны сервисы удержания заданной точки и буксировки на орбите, спутники на ГСО могли бы оставаться на расчетных орбитах до тех пор, пока запасы их топлива не истощаться полностью, и затем перемещались бы на орбиту захоронения посредством буксировки. Этот альтернативный вариант принесет дополнительный доход операторам спутников вследствие более продолжительного использования бортовых ретрансляторов. Более того, спутники на ГСО смогут оставаться на расчетных орбитах даже после полного истощения запаса их топлива посредством обеспечения сервиса по удержанию заданной точки космическим буксировочным сервисным спутником, как будет описано ниже.
Сервис буксировки, или задача продления срока службы, может быть сложной. Несколько идей были описаны в прошлом. Некоторые из этих предложений включали в себя использование больших спутников и, в конечном счете, более дорогих решений, которые вероятно были за порогом рентабельности. Другие предлагали сервисы по дозаправке, которые могло быть сложно выполнить, когда обслуживаемый спутник не был заранее сконструирован для такого обслуживания. Другая сложность состоит в том, что текущие космические спутники не были сконструированы для обслуживания и имеют различные формы и механические/электрические/топливные интерфейсы.
Соответственно, существует потребность в решении, которое позволит множеству спутников, которые приближаются к последнему периоду службы топлива, использовать и полностью истощать свое топливное средство для первоначальной задачи спутника, оставляя внешнему сервису задачу буксировки истощенного спутника до орбиты захоронения. Такой внешний сервис должен быть способен обслуживать множество различных спутников, сконструированных и запущенных на протяжении множества лет, и должен быть рентабельным. Предпочтительно, такой внешний сервис должен быть способен также обеспечить сервисы по удержанию заданной точки и другие сервисы, такие как перемещение спутника на новую орбитальную позицию, повторное использование уже наклоненных спутников и коррекция орбиты смещенных спутников, чтобы дополнительно поддержать срок службы спутника, испытывающего недостаток топлива, но по-прежнему имеющего функционирующие системы для выполнения миссии.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к сервисному спутнику, имеющий корпус, контроллер и стыковочное устройство. Стыковочное устройство включает в себя по меньшей мере два складных, регулируемых захватывающих рычага, шарнирно установленных на корпусе спутника, причем каждый захватывающий рычаг выполнен с возможностью поворота относительно корпуса спутника, и захватывающий конец на каждом свободном конце захватывающих рычагов, в котором захватывающие концы приспособлены и выполнены с возможностью охватывания и захвата заданного участка орбитального спутника. Каждый захватывающий рычаг выполнен с возможностью независимого управления посредством контроллера, который координирует перемещение рычагов.
Также согласно изобретению обеспечен сервисный спутник, имеющий корпус, контроллер и силовое устройство, причем силовое устройство включает в себя главную силовую систему, включающую в себя первый двигатель, установленный смежно с надирным концом корпуса сервисного спутника; и компенсирующий двигатель, установленный на рычаге для компенсирующего двигателя. Компенсирующий двигатель размещен на расстоянии от первого двигателя и обращен в направлении, отличном от направления первого двигателя. Спутник дополнительно включает в себя топливо для двигателя и компенсирующего двигателя и средство для ориентации двигателей так, чтобы вектор тяги проходил через общий центр масс сервисного спутника и обслуживаемого спутника.
Согласно изобретению дополнительно обеспечен сервисный спутник для технического обслуживания обслуживаемого спутника, причем сервисный спутник включает в себя складывающееся и развертывающееся силовое устройство, складывающееся и развертывающееся стыковочное устройство, складывающиеся и развертывающиеся солнечные панели, антенну связи на складывающейся и развертывающейся стреле, корпус спутника для установки на него силового устройства, стыковочного устройства, солнечных панелей и стрелы для связи, и блок управления в корпусе, в котором объем и масса спутника со сложенным силовым устройством, сложенным стыковочным устройством, сложенными солнечными панелями и сложенной стрелой для связи соответствует критерию определению объема и массы коммерческой вспомогательной нагрузки.
Также согласно изобретению обеспечен способ стыковки сервисного спутника с обслуживаемым спутником, причем способ включает в себя перемещение сервисного спутника на расстояние сближения к спутнику, подлежащему обслуживанию, развертывание по меньшей мере двух захватывающих рычагов, причем каждый захватывающий рычаг имеет захватывающий конец, до расстояния между рычагами, которое превышает размер заданного участка обслуживаемого спутника, приведение в действие силового устройства для подхода сервисного спутника к обслуживаемому спутнику, и закрытие захватывающих рычагов до тех пор, пока захватывающие концы не охватят заданный участок обслуживаемого спутника и не захватят заданный участок.
Согласно изобретению дополнительно обеспечен способ перемещения обслуживаемого спутника на орбиту на долготную позицию, определяющую три перпендикулярные плоскости, N/S, E/W, Ze/Na, причем способ включает в себя стыковку сервисного спутника, имеющего контроллер, с обслуживаемым спутником, приведение в действие первого двигателя для работы в первом направлении в течение выбранного периода времени, приведение в действие компенсирующий двигатель, установленный на расстоянии от первого двигателя для работы во втором направлении в течение выбранного периода времени, чтобы обеспечить удержание заданной точки в плоскости, выбранной из N/S или E/W, и регулирование ориентации двигателей так, чтобы вектор тяги проходил через общий центр масс сервисного спутника и обслуживаемого спутника.
Согласно вариантам выполнения изобретения, способ дополнительно включает в себя поворот сервисного спутника относительно обслуживаемого спутника на выбранный угол рыскания до этапа стыковки.
Также согласно изобретению обеспечен способ изменения орбиты обслуживаемого спутника, причем способ включает в себя изменение направления тяги состыкованных сервисного спутника и обслуживаемого спутника, запуск двигателя для создания вектора тяги для перемещения состыкованных сервисного спутника и обслуживаемого спутника в измененном направлении полета, регулирование ориентации двигателей так, чтобы вектор тяги проходил через общий центр масс сервисного спутника и обслуживаемого спутника, когда состыкованные сервисный спутник и обслуживаемый спутник достигают требуемой орбитальной позиции, и отстыковку сервисного спутника от обслуживаемого спутника, чтобы обеспечить изменение орбиты обслуживаемого спутника.
Согласно изобретению дополнительно обеспечен способ сведения с орбиты обслуживаемого спутника, причем способ включает в себя изменение направления тяги состыкованных сервисного спутника и обслуживаемого спутника, запуск двигателя для создания вектора тяги для перемещения состыкованных сервисного спутника и обслуживаемого спутника в измененном направлении, регулирование ориентации двигателей так, чтобы вектор тяги проходил через общий центр масс сервисного спутника и обслуживаемого спутника, когда состыкованные сервисный спутник и обслуживаемый спутник достигают требуемой долготы, запуск двигателей сервисного спутника для замедления состыкованных спутников, и при достижении траектории падения, отстыковку сервисного спутника от обслуживаемого спутника, чтобы обеспечить изменение орбиты обслуживаемого спутника.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Объект, рассматриваемый в качестве изобретения, отдельно отмечен и явно описан в заключительной части описания. Однако изобретение как в части организации, так и метода работы, вместе с его объектами, признаками и преимуществами, может быть лучше понято путем ссылки на следующее подробное описание при прочтении вместе с сопровождающими чертежами, на которых:
Фиг. 1A функциональная блок-схема, изображающая сервисный спутник в его сложенном положении согласно некоторым вариантам выполнения настоящего изобретения;
Фиг. 1B схематичное изображение сервисного спутника с Фиг. 1A в развернутом положении согласно некоторым вариантам выполнения настоящего изобретения;
Фиг. 2A схематичное изображение переднего участка сервисного спутника и захватывающего устройства согласно вариантам выполнения настоящего изобретения;
Фиг. 2B схематичное изображение сервисного спутника с Фиг. 2A, причем захватывающие рычаги развернуты согласно вариантам выполнения настоящего изобретения;
Фиг. 3A и 3B схематично изображают механизмы развертывания согласно вариантам выполнения настоящего изобретения;
Фиг. 4A, 4B, 4C, 4D, 4E и 4F схематично изображают конструкцию зажимных концов захватывающих рычагов и то, как они взаимодействуют с ободом стыковочного шпангоута обслуживаемого спутника, согласно вариантам выполнения настоящего изобретения;
Фиг. 5A, 5B и 5C, изображают процесс стыковки сервисного спутника с обслуживаемым спутником, согласно вариантам выполнения настоящего изобретения;
Фиг. 6A, 6B и 6C схематичные изображения компенсации ориентации, согласно некоторым вариантам выполнения настоящего изобретения;
Фиг. 7A и 7B схематично изображают обозначения, связанные с положением и направлениями геостационарного спутника;
Фиг. 8 схематично изображает два двигатели, работающих над задачей удержания заданной точки, после стыковки сервисного спутника с обслуживаемым спутником, согласно вариантам выполнения настоящего изобретения;
Фиг. 9 схематично изображает положение и направления работы двух двигателей с Фиг. 8, согласно вариантам выполнения настоящего изобретения;
Фиг. 10 схематично изображает выполнение коррекций E/W положения обслуживаемого спутника согласно вариантам выполнения настоящего изобретения;
Фиг. 11A-11C схематично изображают один способ захвата обслуживаемого спутника, согласно вариантам выполнения изобретения;
Фиг. 12A-12D схематично изображают один способ захвата обслуживаемого спутника, согласно вариантам выполнения изобретения;
Фиг. 13 схематичное изображение факелов двигателей в спутнике согласно вариантам выполнения изобретения; и
Фиг. 14A и 14B схематичные изображения сервисного спутника согласно изобретению, наклоняющего себя относительно обслуживаемого спутника.
Следует понимать, что для простоты и ясности изображений элементы, показанные на фигурах, необязательно изображены в масштабе. Например, для ясности размеры некоторых элементов могут быть преувеличены по сравнению с другими элементами. Дополнительно, где уместно, ссылочные позиции могут повторяться среди фигур для обозначения соответствующих или аналогичных элементов.
ПОДРОБНОЕ ОПИСАНИЕ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
В следующем подробном описании излагается множество конкретных деталей, для того чтобы обеспечить полное понимание изобретения. Однако специалистам в данной области техники понятно, что настоящее изобретение может быть использовано на практике без этих конкретных деталей. В других случаях, широко известные способы, процедуры и компоненты не были описаны подробно, чтобы не затруднить понимание настоящего изобретения.
Хотя варианты выполнения изобретения не ограничены в этом отношении, если специально не указано иное, как видно из следующих описаний, ясно, что описания, использующие термины, такие как, например, «обрабатывающий», «вычислительный», «вычисляющий», «определяющий», «составляющий», «анализирующий», «присваивающий», «проверяющий», «принимающий», «выбирающий», «сравнивающий», «сообщающий», «записывающий», «регистрирующий», «подсказывающий», «хранящий» или подобные, относятся к операции(-ям) и/или процессу(-ам) компьютера, вычислительной платформы, вычислительной системы или другого электронного вычислительного устройства, которое обращается с и/или преобразует данные, представленные в виде физических (например, электронных) величин внутри регистров и/или памяти компьютера, в другие данные, аналогично представленные в виде физических величин внутри регистров и/или памяти компьютера или в другой информационной энергонезависимой среде хранения, которая может хранить команды для выполнения операций и/или процессов.
Хотя варианты выполнения изобретения не ограничены в этом отношении, термины «множество» и «одно множество» в данном контексте могут включать в себя, например, «несколько» или «два или более». Термины «множество» или «одно множество» могут быть использованы во всем описании для обозначения двух или более компонентов, устройств, элементов, блоков, параметров или подобного. Если явно не указано, варианты выполнения способа, описанные здесь, не ограничены конкретным порядком или последовательностью. Дополнительно, некоторые из описанных вариантов выполнения способа или его элементов могут происходить или выполняться одновременно, в один и тот же момент времени или параллельно.
В данном контексте термин «накопитель» может относится к любой установке, устройству, системе и/или массиву устройств, которые выполнены с возможностью хранения данных, например, видеозаписей. Накопитель может включать в себя массовое запоминающее устройство, например SD-карты, оптическое запоминающее устройство, такое как CD, DVD или лазерный диск; магнитное запоминающее устройство, такое как пленка, жесткий диск, избыточный массив из независимых дисков (RAID), накопитель с прямым подключением (DAS). Каждый из накопителей может включать в себя возможность записи данных в хранилище и чтения данных из накопителя для дальнейшего использования, например, видеофайлы могут быть по запросу прочитаны из накопителя, например, когда требуется расследование происшествия. Память может являться энергонезависимой машиночитаемой средой хранения, которая может хранить в себе команды, которые при выполнении процессором, заставляют процессор выполнять операции и/или способы, например, способ, раскрытый здесь.
Настоящее изобретение относится к сервисному спутнику, который предназначен для стыковки с любым спутником, который включает в себя стандартный стыковочный шпангоут (IR) (например, разъемное стыковочное кольцо Ariane) между ракетой-носителем и спутником. Сервисный спутник включает в себя универсальный стыковочный механизм, который выполнен с возможностью стыковки со стандартным стыковочным шпангоутом спутника без предварительной подготовки обслуживаемого спутника. Сервисный спутник предназначена для обслуживания спутников, главным образом геостационарных спутников и спутников на НОО (низкой околоземной орбите), но не ограничен этими типами спутников. Несмотря на то, что сервисный спутник может иметь любую требуемую форму и размеры, он может быть выполнен в виде небольшого спутника, который соответствует ограничениям и требованиям, предъявляемым к вспомогательной нагрузке, как определено запускающим ведомством, например, класса ESPA (переходник перспективной одноразовой ракеты-носителя к отсеку вторичной нагрузки). Предпочтительно, каждый сервисный спутник может обслуживать множество спутников, подлежащих обслуживанию, по одному за раз. В частности, сервисный спутник может обеспечивать выбранные орбитальные сервисы, например, удержание заданной точки для увеличения срока службы спутников при истощении запасов из топлива, перемещение на новые орбитальные позиции, повторное использование наклоненных спутников, коррекция орбиты смещенных спутников и сведение с орбиты спутников в конце срока службы.
Ссылаясь на Фиг. 1A и 1B, которые схематично изображают сервисный спутник 100 в его сложенном положении в виде функциональной блок-схеме и в развернутом положении, соответственно, согласно вариантам выполнения настоящего изобретения. Сервисный спутник 100 имеет конструкцию, которая позволяет ему, в его сложенном положении, иметь внешние размеры, позволяющие вместить его в пространство 125 для вспомогательной нагрузки ракеты-носителя, показанное прямоугольником из пунктирных линий, как определено запускающим ведомством. Предпочтительно, сервисный спутник имеет размеры, которые соответствуют критерию переходника EELV (перспективной одноразовой ракеты-носителя) к отсеку вторичной нагрузки (ESPA) или AQUILA, для снижения стоимости, или любому другому стандарту по вспомогательной нагрузке. Эти определения меняются время от времени и различны для каждой ракеты-носителя. Размеры сервисного спутника будут выбраны согласно требованиям выбранной ракеты-носителя. Некоторые неограничивающие примеры подходящих размеров для микроспутника составляют 60-100 см в ширину, 60-100 см в длину и от 80 до 150 см в высоту, причем стартовый вес не превышает предельный вес вспомогательной нагрузки, который может составлять, например, 150-400 кг, в зависимости от ракеты-носителя. Следует понимать, что сервисный спутник, когда сконструирован в виде микроспутника согласно настоящему изобретению, может быть включен в дополнительную нагрузку, когда главный космический аппарат в ракета-носителе удерживает вторичный космический аппарат. В этом случае, размеры могут быть даже больше. Ясно, что другие физические ограничения также могут применяться, ограничивая размер и вес спутника, размещенного в объеме для вспомогательной нагрузки.
Микроспутники были сконструированы для соответствия этим ограничениям в сложенном положении. Особое внимание было проявлено к размеру массива солнечных панелей, конструкции силовой системы и антенны передачи данных. Складывающиеся солнечные панели обеспечивают очень большую мощность от очень ограниченного начального объема в сложенном виде. Следует понимать, что массив по существу превышает размер корпуса спутника. Силовая система включает в себя пару двигателей, которые работают вместе для достижения требований к системе. Эти двигатели установлены на очень большом расстоянии друг от друга, которое намного превышает фактическую длину спутника. Это достигается путем использования развертывающейся стрелы для развертывания одного из двигателей. Механизм развертывания может включать в себя спиральную трубку, которая выполнена с возможностью выполнения требуемого поворота и перемещения топлива из топливного резервуара к развернутому двигателю, как показано на Фиг. 1C. Антенна передачи данных также прикреплена к развертывающейся стреле, которая вытягивается после запуска на значительную длину, позволяя антенне передавать за «тенью» обслуживаемого спутника. Аналогично, стыковочный механизм согласно этому варианту выполнения настоящего изобретения включает в себя множество развертывающихся захватывающих рычагов, которые могут быть сложены для размещения в зоне нагрузки. Эти конструктивные признаки позволяют минимизировать габаритный размер сервисного спутника.
Сервисный спутник 100 имеет корпус 110, на который установлено захватывающее устройство 102, обычно расположенное на одном конце сервисного спутника 100, который называется надирным концом. Захватывающее устройство 102 включает в себя набор захватывающих рычагов 108, которые в их сложенном положении не выступают за зону 101 вспомогательной нагрузки. Сервисный спутник 100 дополнительно включает в себя блок 104 управления в корпусе 110. Блок 104 управления сообщается с наземной станцией (не показана), которая управляет сервисным спутником для приема команд, как известно в обычных спутниках. Блок 104 управления служит для управления развертыванием и работой различных компонентов спутника. Несмотря на то, что блок 104 управления предпочтительно выполняет функцию независимого контроллера при выполнении требований к задаче ему может помогать наземная станция для некоторых вычислений.
Силовое устройство 105 также обеспечено в спутнике 100, в данном случае включая в себя три двигателя 101, 103 и 107 (видны на Фиг. 1b), расположенные вокруг спутника, как описано подробно ниже, чтобы обеспечить различные режимы работы. Спутник 100 дополнительно включает в себя набор развертывающихся солнечных панелей 106 и набор принимающих/передающих антенн (не показаны) на развертывающейся стреле 111 для связи, установленной на корпусе 110, которая может быть размещена внутри зоны нагрузки. Развертывающиеся солнечные панели 106 и развертывающиеся антенны, когда находятся в их сложенном положении, не выступают за пределы объема вспомогательной нагрузки. PCT заявка PCT/IL2013/050681 изобретателя настоящего изобретения, опубликованная как WO 2014/024199 и называемая «МАЛООБЪЕМНЫЙ МИКРОСПУТНИК С ГИБКИМИ СМОТАННЫМИ ПАНЕЛЯМИ, РАСКЛАДЫВАЕМЫМИ ПОСЛЕ ЗАПУСКА», которая включена сюда полностью, описывает множество возможных решений для развертывающихся приемопередающих антенн и солнечных панелей. Альтернативно, любое другое расположение складывающихся солнечных панелей и антенн может быть использовано.
Блок 104 управления включает в себя контроллер (бортовой блок обработки), интерфейсные блоки (не показаны) хранения данных и ввода/вывода (I/O). Контроллер может быть выполнен с возможностью выполнения управляющих задач сервисного спутника 100, включая в себя прием передач и указаний местоположения, прием и обработка данных от датчиков спутника, хранение данных в накопителе данных, получение данных из накопителя данных, запуск программ, хранящихся в накопителе данных, которые при работе позволяют выполнять операции, описанные в этой заявке. Среди прочих операций контроллер выполнен с возможностью навигации сервисного спутника 100 к указанным спутникам, которым требуется его сервисное обслуживание, чтобы управлять подходом, сближением и в конечном счете стыковкой спутника 100 к обслуживаемому спутнику, и для навигации обслуживаемого спутника к требуемым положению и орбите. Предпочтительно, контроллер также выполнен с возможностью управления расстыковкой сервисного спутника от обслуживаемого спутника и использования сервисного спутника для его следующей задачи.
Силовое устройство 105 выполнено с возможностью привода сервисного спутника в требуемое положение в требуемой ориентации и, после стыковки, перемещения блока из сервисного спутника 100 и обслуживаемого спутника в требуемые положение и орбиту и выполнения других операций, таких как удержание заданной точки, для обоих спутников. Силовое устройство 105 включает в себя две системы: главную силовую систему, которая нацелена на выполнение главных перемещений сервисного спутника и, после стыковки с обслуживаемым спутником, на выполнение операций и совместных перемещений пары спутников, и вторичную силовую систему, которая выполняет более быстрые тяговые операции и операции по контролю ориентации.
Главное силовое устройство может быть осуществлено любым известным средством перемещения, хотя особенно подходит технология, называемая «электрический двигатель», поскольку ее работа улучшена посредством электричества, получаемого от солнечных лучей и поступающего от больших солнечных панелей спутника. Эта технология создает силовую систему с очень высоким КПД и позволяет небольшому спутнику выполнять значительное количество эффективной работы. Таким образом, она подходит для использования в небольшом сервисном спутнике. Согласно некоторым вариантам выполнения, главная силовая система включает в себя три электрических силовых двигателя. Один обозначен 101 и расположен вблизи заднего или зенитного конца спутника 100. Двигатель 101 обеспечивает тягу в направлении полета сервисного спутника. Второй двигатель обозначен 103 и расположен вблизи передней или надирной стороны спутника. И третий электрический силовой двигатель, обозначенный 107, расположен на стреле или рычаге 113, продолжающемся из корпуса спутника. Двигатель 107 выполняет функцию компенсирующего двигателя при операциях по удержанию заданной точки и ее направлению, и предпочтительно расположен на наиболее удаленном расстоянии от двигателя 103. В некоторых вариантах выполнения, стрела является развертывающейся стрелой. В других вариантах выполнения, стрела является телескопической стрелой. Эти возможности особенно полезны при создании микроспутника, который должен вписаться в конкретные размеры нагрузки. Однако, если пространство не является ограничителем, стрела может являться неподвижной (неразвертывающейся) стрелой. В некоторых случаях, если двигатель 103 расположен на поворотном рычаге (не показан), он может выполнять также задачи двигателя 101 и уменьшить количество требуемых двигателей с трех до двух. В этом случае, двигатель выполнен с возможностью поочередного использования одного из двух положений - первого положения для перемещения в направлении полета, и второго положения для удержания заданной точки.
Силовое устройство также включает в себя вторичную силовую систему, которая выполняет более быстрые тяговые операции и различные операции по контролю ориентации. Вторичная силовая система включает в себя множество двигателей 109, например, от 4 до 12, размещенных по корпусу или зоне нагрузки спутника, как требуется. Эти двигатели могут являться химическими двигателями, использующими свое собственное топливо, или омическими реактивными двигателями или двигателями с использованием холодного газа, которые работают на своем собственном топливе. Альтернативно, вторичные двигатели могут использовать топливо главной силовой системы. Силовое устройство также включает в себя главный топливный резервуар для топлива главной силовой системы, например, ксенона или другого топлива для электрической тяги, которое также может обслуживать двигатели вторичной системы. Альтернативно, или в дополнение, силовая система также может включать в себя отдельный вторичный топливный резервуар для обслуживания двигателей вторичной системы. Работой силового устройства управляет блок 104 управления спутника, либо независимо, либо по командам от главного блока управления на наземной станции.
Фиг. 1B показывает сервисный спутник с Фиг. 1A в развернутом положении. Сервисный спутник имеет корпус, контроллер и стыковочное устройство. Стыковочное устройство включает в себя по меньшей мере два складных, регулируемых захватывающих рычага, шарнирно установленных на корпусе спутника, причем каждый захватывающий рычаг выполнен с возможностью поворота относительно корпуса спутника, и захватывающий конец на каждом свободном конце захватывающих рычагов, в котором захватывающие концы приспособлены и выполнены с возможностью охватывания и захвата заданного участка орбитального спутника. Каждый захватывающий рычаг выполнен с возможностью независимого управления посредством контроллера, который координирует перемещение рычагов.
Как можно видеть в изображенном варианте выполнения, захватывающие рычаги 108, имеющие захватывающие концы 109, были развернуты по направлению к надирной стороне сервисного спутника 100, как описано подробно ниже. Одновременно, солнечные панели 106 развернуты за захватывающими рычагами 108, чтобы обеспечить питание различных компонентов сервисного спутника. Аналогично, компоненты силового устройства 105 развернуты, чтобы обеспечить перемещение сервисным спутником 100 обслуживаемого спутника в соответствии с командами от блока управления. На данном изображении можно видеть двигатели 101, 103 и 107, причем двигатель 107 удерживается в держателе 115 на конце развертывающейся стрелы 113.
Теперь ссылка делается на Фиг. 2A, которая является схематичным изображением надирного участка сервисного спутника 100. Как можно видеть в изображенном варианте выполнения, надирный участок включает в себя захватывающее устройства 202, включающее в себя две пары шарнирно соединенных захватывающих рычагов 204, 204'. В изображенном варианте выполнения, каждый захватывающий рычаг 204, 204' выполнен из четырехзвенного рычажного механизма. Одно из четырех звеньев, или сочленений, в каждом механизме называется «основанием» и прикреплено к корпусу спутника, например винтами. В изображенном варианте выполнения, каждый захватывающий рычаг прикреплен к спутнику отдельно. Согласованное приведение в действие 4 рычагов делает их одним узлом, но они физически не прикреплены к общей платформе, которая характерна для стыковочных рычагов. Следует понимать, что альтернативно может быть использована только одна пара захватывающих рычагов, расположенных радиально противоположно. Согласно другим вариантам выполнения, три захватывающих рычага выполнены на расстоянии друг от друга вокруг спутника. Далее будет понятно, что другие варианты складывания и размещения также возможны. Например, одно звено, шарнирно соединенное с корпусом, или шестизвенное соединение, или другое расположение независимо регулируемых рычагов может быть обеспечено. Альтернативно, рычаги могут быть нерегулируемыми. В этом случае, требуются конструктивные изменения для обеспечения относительного перемещения (наклона и/или рыскания) между сервисным спутником и обслуживаемым спутником, например, установка двигателей на поворотной платформе.
Один или более датчиков 210 обеспечены на корпусе 110 сервисного спутника 100 и выполнены с возможностью способствовать управлению подхода и стыковки сервисного спутника 100 к обслуживаемому спутнику, как описано подробно ниже. Датчики 210 могут являться обычными датчиками сближения и стыковки. В изображенном варианте выполнения, датчики 210 расположены на надирной поверхности, хотя альтернативно они могут быть расположены в ином месте на спутнике, например на боковых панелях. Каждый из захватывающих рычагов 204, 204' может быть выполнен, в общем, в виде четырехзвенного рычажного механизма, с захватывающим или зажимным концом 204H на его свободном конце. Четырехзвенный рычажный механизм включает в себя рабочий стержень 204A, который шарнирно соединен в двух местах вдоль его длины с первыми концами двух колен 204C и 204D четырехзвенного рычажного механизма захватывающего рычага 204. Четвертым элементом четырехзвенного рычажного механизма является неподвижный стержень 204B, который может быть шарнирно соединен в двух местах вдоль его длины со вторыми концами колен 204C, 204D, таким образом образуя четырехзвенный рычажный механизм захватывающего рычага 204. Альтернативно, вторые концы колен 204C, 204D могут быть шарнирно соединены непосредственно с корпусом сервисного спутника, устраняя потребность в базовом сочленении 204B. Колена 204C и 204D могут быть соединены, на одном из их концов, посредством шарниров 204F с неподвижным стержнем 204B и, посредством шарниров 204G со стержнем 204A, таким образом позволяя рабочему стержню 204A оставаться по существу параллельным неподвижному стержню 204B на всем его перемещении развертывания. С другой стороны, согласно другим конструкциям, угол наклона стержня значительно разнится во время развертывания. Следует понимать, что неподвижный стержень 204B может быть прикреплен к боковой стороне корпуса спутника 100 или может быть выполнен в виде части боковой стороны корпуса спутника 100.
Конструкция четырехзвенного рычажного механизма захватывающего рычага 204 позволяет рабочему стержню 204A перемещаться на шарнирах 204G и позволяет коленам 204C и 204D перемещаться на шарнирах 204F. Перемещение рабочего стержня 204A, на одном дальнем конце диапазона его перемещения, может совершаться в сложенное положение, где рабочий стержень 204A прикреплен к боковой стороне корпуса захватывающего элемента 202 или даже сложен в специальное углубление, выполненное на боковой стороне корпуса захватывающего устройства 202. Рабочий стержень 204A может перемещаться, в другом направлении перемещения, в развернутое положение и затем в одно из нескольких захватывающих положений. Этот перемещение показано стрелкой 205. Величина перемещения захватывающего рычага 204 из одного положения в другое положение и величина прикладываемого захватывающего усилия, используемого рычагом 204 в его захватывающем положении, может точно управляться, как описано подробно ниже. Перемещение каждого из захватывающих рычагов 204, и положение, в котором оно прекращается, может управляться отдельно и независимо друг от друга, хотя рычаги предпочтительно согласованы друг с другом. То есть, они необязательно перемещаются вместе. Возможно, что будет перемещаться только один рычаг, но блок управления должен согласовывать перемещение каждого рычага с положением или перемещением других. Независимое и взаимно отдельное перемещение каждого из захватывающих рычагов 204 обеспечивает высокую гибкость в выполнении задач сервисного спутника 100, где часто требуется асимметричная совместная работа.
Специалистам в данной области техники будет понятно, что надлежащее функционирование захватывающего рычага 204, согласно вариантам выполнения настоящего изобретения, может быть достигнуто при помощи конструкции рычага, которая необязательно имеет форму точного параллелограмма. Например, одно из колен 204C, 204D может быть немного более коротким чем другое, вызывая перемещение рабочего стержня 204A, которое не точно параллельно неподвижному стержню 204B. Иными словами, может быть использована любая конструкция, которая обеспечивает управление перемещением и работой рабочего стержня 204A в целом, или обеспечивает перемещение и работу захватывающего конца 204H в частности, во всех рабочих положениях и для всех задач, описанных здесь ниже. Например, конструкция рычагов 204 должна обеспечивать позиционирование захватывающих концов 204H, при приближении к зажимающему положению, в геометрических положениях, которые расположены вблизи заданного периметра объекта, подлежащего захвату, и в заданные положения на этой границе периметра. Например, если объект, подлежащий захвату, является спутником связи или «ComSat», и цель состоит в его захвате посредством захвата его стыковочного шпангоута (СШ), заданный периметр является плоским кругом, и положениями вокруг этого круга могут быть четыре точки (в случае сервисного спутника, оснащенного четырьмя рычагами), расположенными на расстоянии друг от друга по кругу.
Дополнительно, точная конструкция захватывающего конца 204H рычага 204 может быть выбрана так, чтобы обеспечивать зацепление заданных конструкций объекта, подлежащего захвату, в то же время оставляя достаточный просвет или механическую степень свободы для каждого из захватывающих концов 204H, чтобы зацеплять захваченный объект под различными относительными углами. Это обеспечивает сервисному спутнику 100 достаточную гибкость для зацепления объекта под управляемым относительным углом между продольной осью сервисного спутника и базовой осью захваченного объекта, как проиллюстрировано согласно некоторым вариантам выполнения, описанным здесь ниже.
Задачи сближения и стыковки сервисного спутника 100 могут быть выполнены в одном из двух главных режимов - полуавтоматическом и полностью автономном. Для того чтобы обеспечить точные и безопасные сближение и стыковку, один или более датчиков 210 могут быть установлены, например, на надирной стороне сервисного спутника 100 (стороне спутника 100, обращенной к захватывающим концам 204H, когда рычаги 204 развернуты), так чтобы область, в которой предполагается обнаружение обслуживаемого спутника, была в пределах досягаемости этих датчиков. Датчики 210 могут являться, например, одним или более из следующих датчиков: видеокамера для формирования 2D-изображения, из которого могут быть получены относительное положение и скорость, используя алгоритмы обработки изображения, или множество видеокамер для формирования 3D-изображения и получения измеренных расстояний из 3D-изображения, датчик расстояния, лидарное - (лазерная система обнаружения и измерения дальности) радарное устройство малого радиуса действия, облучающее устройство, инфракрасное измерительное устройство. Показания датчиков 210 могут восприниматься контроллером сервисного спутника и обрабатываться согласно конкретной задаче. Альтернативно, показания датчиков 210 могут быть загружены на наземную станцию, обработаны там, и наземная станция вернет команду, основанную на обработанных данных. На основе обработки этих показаний и на основе программы конкретной задачи, контроллер вырабатывает управляющие команды для различных систем, включая в себя силовые устройства сервисного спутника, такие как устройство 105 на Фиг. 1, для направления сервисного спутника 100 в правильные положение и ориентацию относительно обслуживаемого спутника.
Обращаясь теперь к Фиг. 2A, когда захватывающие рычаги 204 находятся в их рабочем положении (развернутом положении или положении захвата), их захватывающие концы 204H могут охватывать расстояние DСЕРВИСА перед передним концом захватывающего устройства 202. Расстояние DСЕРВИСА обусловлено длиной DРЫЧАГА_1, продолжающейся между шарнирным соединением колена 204D и рабочего стержня 204A, и длиной DРЫЧАГА_2 колена 204D, и углом αРАЗВЕРТЫВАНИЯ (Фиг. 3B) между рабочим стержнем 204A и коленом 204C. Расстояние DЗАХВАТА между двумя противоположными захватывающими концами 204H захватывающих рычагов 204 в общем обусловлено длиной DРЫЧАГА_2 колена 204D и размером DКОРПУСА, который является шириной корпуса захватывающего устройства 202 между стержнями 204B двух противоположных рычагов 204. В общем, расстояние DЗАХВАТА может лежать в диапазоне между (DКОРПУСА+2 х DРЫЧАГА_1) и DКОРПУСА, так что спутник 100 является по существу универсальным сервисным спутником. Этот широкий диапазон рабочего раскрытия DЗАХВАТА обеспечивает высокую гибкость, позволяя одному сервисному спутнику 100 обеспечивать сервис множества обслуживаемых спутников, как описано подробно здесь ниже и подробно показано на Фиг. 2B, на которую теперь делается ссылка. Фиг. 2B схематично показывает примеры различных диаметров D1, D2 стыковочных шпангоутов, часто используемых на спутниках ComSat, и относительное рабочее раскрытие DЗАХВАТА захватывающих рычагов 204, 204' согласно вариантам выполнения настоящего изобретения.
Фиг. 2B показывает схематичный вид спереди захватывающего устройства 202 сервисного спутника, такого как спутник 100, вдоль его продольной оси, причем захватывающие рычаги 204 и 204' выдвинуты в некоторое рабочее положение перед захватом обслуживаемого спутника или после его освобождения. Солнечные панели 270 можно видеть развернутыми за захватывающими рычагами 204. Центральная точка 203 окружностей D1 и D2 на чертеже по существу перекрывает проекцию продольной оси 203 (показанной на Фиг. 2A) устройства 202. Каждая из окружностей D1 и D2 представляет собой внешний периметр стыковочного шпангоута некоторой группы спутников. Окружность D1 относится к стыковочным шпангоутам относительно большого диаметра, например, с номинальным диаметром 1666 мм; в то время как окружность D2 относится к стыковочным шпангоутам относительно малого диаметра, например, с номинальным диаметром 937 мм. Как видно на Фиг. 2B, рабочее раскрытие DЗАХВАТА любой пары двух противоположных захватывающих рычагов 204, 204' превышает наибольший диаметр D1 различных стыковочных шпангоутов, таким образом обеспечивая возможность взаимодействия с любыми стыковочными шпангоутами, имеющими диаметр менее DЗАХВАТА. Диапазон диаметров, которые могут быть обслужены конкретным сервисным спутником, зависит от конструкции захватывающих рычагов и их возможности зацеплять стыковочный шпангоут под углом. Будет ясно, что вышеприведенные диаметры являются только примерами, и может быть использован большой диапазон других диаметров или стыковочных конструкций, имеющих формы, отличные от круглой.
Ссылка делается на Фиг. 3A и 3B, которые схематично изображают механизм 320 развертывания, согласно вариантам выполнения изобретения, который выполнен с возможностью управления углом αРАЗВЕРТЫВАНИЯ развертывания, таким образом управляя работой захватывающего рычага, такого как захватывающий рычаг 204. Механизм 320 развертывания, в изображенном варианте выполнения, включает в себя двигатель 322, который выполнен с возможностью вращения винтового зубчатого колеса 324. Винтовое колесо 324 выполнено с возможностью приведения в движение зубчатого колеса 326 вокруг шарнира 327. Эта конструкция может служить в качестве одного из шарниров 204F в каждом рычаге 204, таким образом управляемо изменяя угол αРАЗВЕРТЫВАНИЯ развертывания. Двигатель 322 является предпочтительно электрическим двигателем, и его работа предпочтительно управляется контроллером сервисного спутника. Альтернативно, наземная станция может управлять двигателем посредством подходящего привода для передачи команд для подходящей коммутации питания. Фактическое мгновенное значение αРАЗВЕРТЫВАНИЯ может быть измерено или выведено, используя индикатор положения или угла, известный в данной области техники, такой как абсолютный датчик, относительный датчик, оптико-электронные измерения и подобное. Более того, способ обработки изображения и подходящий алгоритм, анализирующие положение стыковочных рычагов в поле зрения оптической камеры, могут быть использованы для определения значения αРАЗВЕРТЫВАНИЯ. Механизм 320 развертывания может связываться с контроллером посредством линии 328 управления. Специалистам в данной области техники будет ясно, что механизм развертывания может быть выполнен, используя другие конструкции, которые все лежат в пределах сущности вариантов выполнения настоящего изобретения, до тех пор пока они выполнены с возможностью обеспечения требуемой точности управления αРАЗВЕРТЫВАНИЯ и выполнены с возможностью питания, используя источник питания, который доступен до тех пор пока длится задача сервисного спутника. Для того чтобы обеспечить высокую совместимость сервисного спутника согласно вариантам выполнения настоящего изобретения со множеством различных обслуживаемых спутников, космических аппаратов и других космических объектов, таких как космический мусор, захватывающий механизм настоящего изобретения сконструирован и выполнен с возможностью прикрепления к объекту посредством его стыковочного шпангоута, который является частью большинства обычных спутников. Стыковочный шпангоут является соединительным элементом, соединяющим спутник с запускающей его ракетой, и он имеет один из некоторого набора размеров, используемых большей частью спутников и пусковой отраслью в качестве промышленного стандарта. Например, номинальный диаметр DСТЫК_ШП стыковочного шпангоута может лежать в диапазоне от 937 мм до 2624 мм с шириной RW шпангоута в диапазоне от 4 мм до 12 мм для большинства существующих коммерческих спутников.
Контроллер сервисного спутника выполнен с возможностью приведения в действие захватывающих рычагов для перемещения в захватывающее положение на выбранном расстоянии друг от друга, для того чтобы захватить заданный участок обслуживаемого спутника. Теперь ссылка делается на Фиг. 4A, которая схематично изображает конструкцию захватывающих концов 404A захватывающих рычагов 404 и то, как они могут взаимодействовать со стыковочным шпангоутом обслуживаемого спутника 410, согласно вариантам выполнения настоящего изобретения. В этих вариантах выполнения, каждый захватывающий конец 404A включает в себя углубление 404B, выполненное с возможностью зацепления стыковочного шпангоута 412 обслуживаемого спутника. Расстояние DЗАХВАТА между двумя противоположными захватывающими рычагами 404 захватывающего устройства может быть задано по меньшей мере немного больше DСТЫК_ШП, чтобы позволить сервисному спутнику получить доступ к стыковочному шпангоуту обслуживаемого спутника. Таким образом, каждое углубление 404B захватывающих концов 404A захватывающих рычагов 404 перемещается напротив участка стыковочного шпангоута так, чтобы участок стыковочного шпангоута мог быть плавно вставлен в соответствующее углубление 404B, когда расстояние DЗАХВАТА медленно уменьшается, чтобы осуществить зажатие стыковочного шпангоута посредством захватывающих рычагов 404. Уменьшение размера DЗАХВАТА, для того чтобы осуществить зажатие стыковочного шпангоута, может быть выполнено посредством изменения угла αРАЗВЕРТЫВАНИЯ, как было описано подробно со ссылкой на Фиг. 3A и 3B, или любым другим управляемым образом.
Также ссылка делается на фиг. 4B, 4C и 4D, которые схематично изображают три различных значения относительного угла зажатия стыковочного шпангоута, согласно вариантам выполнения настоящего изобретения. Как можно видеть на Фиг. 4A, 4B и 4C, зажимной конец 404A может подходить к стыковочному шпангоуту под различными относительными углами αШПАНГОУТ_1, измеренными между плоскостью стыковочного шпангоута и захватывающим рычагом 404 в плоскости между рычагом 404 и радиальным направлением стыковочного шпангоута, продолжающимся из точки захвата к центру стыковочного шпангоута. Как можно видеть, диапазон различных относительных углов αШПАНГОУТ_1 может быть использован, в то же время сохраняя возможность зажатия. Поскольку захватывающий конец 404A имеет углубление 404B шириной DШИРИНА_ЗАХВАТА, превышающей ширину стыковочного шпангоута 412 обслуживаемого спутника, некоторая гибкость обеспечена в угле подхода каждого захватывающего конца 404A. Следует понимать, что когда процесс стыковки достигает своего заключительного этапа, и сервисный спутник пристыкован к обслуживаемому спутнику, в некоторых вариантах выполнения, угол зажатия может по существу быть таким, как изображено на Фиг. 4D. Для лучшего позиционирования захватывающих концов 404A перед затягиванием могут быть приведены в действие маховики (не показаны) захватывающих рычагов, чтобы вызвать сотрясение или вибрацию сервисного спутника во время заключительного закрытия рычагов. Следует понимать, что усилие захватывания рычагов в состыкованном положении должно быть достаточно большим, чтобы предотвратить отсоединение стыковочного шпангоута вследствие гибкости рычага во время совместных маневров.
Теперь ссылка делается на Фиг. 4E, которая является частичным видом в изометрии захватывающего конца 404A, прикрепленного к стыковочному шпангоуту 412 согласно вариантам выполнения настоящего изобретения. Как можно видеть, раскрытие углубления 404B захватывающего конца 404A захватывающего рычага 404 превышает ширину стыковочного шпангоута, таким образом обеспечивая некоторое число степеней свободы относительных углов между рычагом 404 и стыковочным шпангоутом 412, таким образом обеспечивая надежное зажатие стыковочного шпангоута набором захватывающих рычагов 404 под множеством относительных углов.
Теперь ссылка делается на Фиг. 4FI, 4FII, 4FIII и 4FIV, схематично изображающие конструкцию захватывающего конца 414A захватывающего рычага 414 согласно альтернативным вариантам выполнения настоящего изобретения под различными углами захвата. Согласно некоторым вариантам выполнения настоящего изобретения, захватывающий рычаг 414 включает в себя захватывающий конец 414A, имеющий захватывающее углубление 414B. Захватывающий конец 414A прикреплен к захватывающему рычагу 414 посредством сферического соединения 414C, обеспечивающего три степени свободы по относительным углам βШПАНГОУТ_1 и βШПАНГОУТ_2, измеренным между захватывающим рычагом 414 и захватывающим концом 414A в трех перпендикулярных плоскостях. Согласно этому варианту выполнения, захватывающие концы 414A могут сохранять направление зажатия, обусловленное стыковочным шпангоутом, в то время как захватывающие рычаги 414 удерживают три степени свободы соответствующих относительных углов между захватывающим рычагом 414 и захватывающим концом 414A.
Следует понимать, что альтернативно любая другая подходящая конструкция, присоединяющая захватывающий рычаг к захватывающему концу, и любая другая подходящая форма углубления в захватывающем конце могут быть использованы. Например, если ожидается большая неточность в относительном положении между сервисным спутником и обслуживаемым спутником, захватывающий конец может быть выполнен так, чтобы допускать такую большую неточность. Один пример возможности состоит во встраивании направляющей пружины в виде крючка в захватывающий конец, которая будет охватывать стыковочный шпангоут в пределах широкого достаточно гибкого углубления и во время захватывающего перемещения рычага будет направлять сужающееся жесткое углубление захватывающего конца на стыковочный шпангоут. Одно осуществление схематично изображено на Фиг. 11A-11C. На Фиг. 11A можно видеть захватывающий конец 1122 захватывающего рычага 1120 со спиральной направляющей пружиной 1124 в виде крючка, расположенной в углублении 1126. По мере того, как захватывающий конец 1122 подходит к стыковочному шпангоуту 1150 обслуживаемого спутника, край шпангоута зацепляется концом 1130 крючка пружины 1124. Захватывающий конец 1122 продолжает подходить и толкает пружину 1124 о стыковочный шпангоут 1150, толкая пружину в углубление 1126 в захватывающем конце, как видно на Фиг. 11B. По мере того, как захватывающий конец 1122 продолжает подходить, край 1150 стыковочного шпангоута скользит вдоль пружины 1124 и до тех пор, пока углубление 1126 удерживает его в требуемый положение, где он удерживается на месте как концом 1130 крючка пружины 1124, так и углублением 1126 захватывающего конца 1122.
Другое осуществление схематично изображено на Фиг. 12-12F. На Фиг. 12A и 12B, захватывающий конец 1212 захватывающего рычага 1210 можно видеть подготовленным к охватыванию заданного участка 1200 (здесь, стыковочного шпангоута) обслуживаемого спутника. Захватывающий конец 1212 включает в себя выступающий профиль 1220, образующий раскрытие 1222 в углубление 1224 в захватывающем конце. Профиль 1220 включает в себя выступающий верхний и нижний охватывающие элементы 1230, которые продолжаются по направлению к заданному участку и обеспечивают широкое раскрытие для охватывания заданного участка под множеством углов подхода. Профиль 1220 сужается, чтобы образовать узкие боковые участки 1232 раскрытия 1222, которые служат для захвата заданного участка 1200, когда захватывающий участок окружает заданный участок. Таким образом, этот вариант выполнения обеспечивает сужение профиля от большого зазора между одной точкой в середине до небольшого зазора в двух удаленных точках на боковых сторонах захватывающего конца. Эта конструкция обеспечивает устойчивость во время угловых перемещений обслуживаемого спутника.
Альтернативно, захватывающий конец может имеют множество углублений, или даже стыковочную поверхность с накаткой, чтобы обеспечить зацепление в произвольной точке на захватывающей поверхности захватывающего конца. Возможность выравнивания обслуживаемого спутника с соответствующими осями тяги, как описано ниже, вместе с тремя ограниченными угловыми степенями свободы между захватывающими концами и захватывающими рычагами, устраняет необходимость в схождении со стыковочным шпангоутом, или любым другим стыковочным элементом на объекте, в точно заданной точке на захватывающем конце.
Конкретным признаком изобретения является то, что стыковка является неинтрузивным, то есть сервисный спутник не выступает в какое-либо свободное пространство или часть обслуживаемого спутника, которая не полностью доступна снаружи и, следовательно, не может проверена перед стыковкой, например, внутреннее отделение сопла апогейного двигателя. Также захватывание осуществляется по меньшей мере двумя рычагами, таким образом освобождение и прерывание после стыковки по причинам безопасности или аварийным причинам является очень надежным. Достаточно открыть половину рычагов, для того чтобы позволить аварийное прерывание.
Способ стыковки согласно вариантам выполнения изобретения состоит в следующем. Сервисный спутник запускается на предназначенную для него сервисную орбиту, непосредственно или через промежуточную орбиту. До фактического начала сервисной миссии, будут проведены орбитальные испытания для проверки функционирования. Спутник прибудет на свою специальную позицию, предпочтительно свободную позицию вблизи группы спутников из возможных обслуживаемых спутников.
Сервисная задача начнется с этапа медленного перемещения, которая предназначена для достижения обслуживаемого спутника, также называемого заказчик, в геостационарном поясе. Согласно положению заказчика, на спутник будет загружена следующая точка маршрута заказчика, и спутник начнет медленно перемещаться на восток/запад согласно кратчайшему вычисленному пути. При приближении к ожидаемому положению заказчика, сервисный спутник будет искать предполагаемый обслуживаемый спутник, используя бортовые оптические датчики, например, лидарный датчик. По мере его подхода к положению сближения, сервисный спутник будет регистрировать и измерять относительное положение обслуживаемого спутника, используя бортовые датчики, например, камеру. Измерения будут передаваться в блок управления, который в свою очередь будет приводить в действие силовую систему, для того чтобы достичь положения сближения - заданного относительного положения между двумя космическими аппаратами, подходящими для стыковки. Следует понимать, что данные о требуемых регулировках для удержания обслуживаемого спутника также передаются в блок управления. Таким образом, положение сближения может уже включать в себя общий требуемый угол рыскания между сервисным спутником и обслуживаемым спутником.
Этап стыковки начинается когда спутник находится на подходящем расстоянии сближения от обслуживаемого спутника, на нулевой относительной скорости полной остановки. Расстояние сближения зависит от размера заданного элемента, подлежащего захвату, поскольку геометрия системы стыковки подразумевает, что захватывающие концы перемещаются вперед по мере уменьшения диаметра DЗАХВАТА захвата. По команде сервисный спутник будет стыковаться, используя все его стыковочные рычаги одновременно. Стыковочные рычаги начнут приближаться к объекту, используя свои электрические двигатели, сначала до тех пор, пока заданный элемент, например стыковочный шпангоут, не будет охвачен захватывающими концами, и затем, путем дальнейшего приведения в действие двигателей, до тех пор, пока рычаги не будут полностью притянуты к заданному элементу.
Качество захватывания может быть определено датчиками, например камерой или другими специальными датчиками известными в области техники, такими как оптические переключатели, тензометрические датчики или подобное, которые будут установлены на рычаги. Кроме того, качество стыковки может быть проверено непосредственно, путем динамического отклика как сервисного, так и обслуживаемого спутников на незначительные смещения в различных направлениях, в то время как они пристыкованы друг к другу.
Предпочтительно, стыковка будет выполнена с угловым смещением корпуса сервисного спутника относительно корпуса обслуживаемого спутника вплоть до четырех (4) градусов на восток или на запад, в зависимости от фактического естественного направления смещения обслуживаемого спутника, чтобы позволить совместные N/S и E/W коррекции во время этапа удержания заданной точки. Во время состыкованного состояния всегда, когда солнечные панели сервисного спутника отбрасывают тень на солнечные панели обслуживаемого спутника, они будут повернуты в перпендикулярное положение для уменьшения эффекта затенения. Как можно видеть на Фиг. 13, солнечные панели 1312 сервисного спутника 1310 предпочтительно установлена под наклоном относительно продольной оси корпуса 1314 сервисного спутника, а не перпендикулярно к нему. Это служит для предотвращения повреждения солнечных панелей факелами 1316 различных двигателей 1318.
Как только стыковка завершена, сервисный спутник и последовательно расположенный обслуживаемый спутник переходят к этапу удержания заданной точки. На данном этапе, два спутника соединены и должны управляться как одно целое, удерживая заказчика на присвоенной орбитальной позиции в рамках требуемых ограничений ориентации. Во время этого этапа, сервисный спутник, который выступает в качестве внешнего «реактивного ранца», будет отвечать за ежедневные совместные N/S и E/W SK маневры.
Чтобы компенсировать несовпадение общего центра масс (jCoG) вдоль осей X и Y, которое вычисляется в реальном времени в течение первых нескольких минут работы двигателя, сервисный спутник будет наклонять себя влево или вправо, вверх или вниз (то есть, перпендикулярно плоскости приведения в действие двигателей при удержании заданной точки (плоскости Na-Ze/N-S на Фиг. 8), используя стыковочные рычаги. Смотри, например, Фиг. 14A и 14B.
Теперь ссылка делается на Фиг. 5A, 5B и 5C, которые изображают процесс стыковки сервисного спутника 500 с обслуживаемым спутником 520. На Фиг. 5A показан этап подхода. Как видно на Фиг. 5A, захватывающее устройство 502 сервисного спутника 500 находится в развернутом положении, причем захватывающие рычаги 514 выдвигаются по направлению к стыковочному шпангоуту 522 по мере подхода сервисного спутника 500 к стыковочному шпангоуту 522 обслуживаемого спутника 520. На этом изображении показана только одна пара захватывающих рычагов. Следует понимать, что расстояние между захватывающими концами 516 захватывающих рычагов 514 превышает диаметр стыковочного шпангоута 522. На Фиг. 5B, сервисный спутник 500 достиг этапа сближения, где захватывающие концы 516 захватывающих рычагов 514 расположены противоположно краям стыковочного шпангоута 522. Сервисный спутник 500 может теперь начать заключительный этап стыковки, изображенный на Фиг. 5C. Как видно на Фиг. 5C, этап стыковки завершается, когда стыковочный шпангоут 522 прочно захвачен между захватывающими концами 516 сервисного спутника. Следует понимать, что такая же кинематика захватывающего рычага, которая служит для развертывания, также служит для захвата во время этапа стыковки. Захватывающие концы 516 всех захватывающих рычагов 514 одновременно подходят и зажимают обод стыковочного шпангоута 522 под любым относительным углом, под которым они могут. В этом положении, сервисный спутник 500 стыкуется к обслуживаемому спутнику 520 и может управлять его ориентацией и положением по командам от блока управления.
Теперь ссылка делается на Фиг. 6A, 6B и 6C, которые схематично изображают компенсацию ориентации, согласно некоторым вариантам выполнения настоящего изобретения. Как описано выше, одна из целей стыковки состоит в перемещении обслуживаемого спутника, используя двигатели сервисного спутника. Для того чтобы исключить паразитные возмущения ориентации расположенных последовательно обслуживаемого спутника 620 и сервисного спутника 600, вектор тяги, показанный на Фиг. 6A, 6B и 6C стрелкой 610, должен быть выравнен с общим центром 612 масс (jCoG). Общий центр 612 масс может не находится в одном и том же положении и может изменяться со временем. Поскольку изменения в ориентации легко измеряются блоком управления сервисного спутника или обслуживаемого спутника посредством, например, астроориентаторов, цепь управления может корректировать несовпадения, которые вызывают эти изменения в ориентации, посредством независимого регулирования положения или зоны охвата каждого рычага, таким образом наклоняя сервисный спутник относительно обслуживаемого спутника, в то же время сохраняя надлежащую стыковку, чтобы достичь выравнивания центра масс. Другими словами, ориентация двигателей так, чтобы вектор тяги проходил через общий центр масс выполняется путем настройки зоны охвата каждого из захватывающих рычагов на требуемую длину, так что небольшой относительный угол возникает между Ze-Na осью обслуживаемого спутника и Ze-Na осью сервисного спутника. Остаточные возмущения могут быть нейтрализованы посредством реактивных колес или маховиков, которые известны в данной области техники.
Теперь ссылка делается на Фиг. 7A и 7B, которые схематично изображают обозначения, связанные с положением и направлениями геостационарного спутника, такого как спутники связи. Спутник 700 является геостационарным спутником, движущимся по орбитальной траектории 7000, по существу выше положения L на поверхности Земли. Плоскость орбиты 7000 параллельна плоскости экватора Земли. Спутник 700 наведен так, чтобы его направление передачи 710 было направлено по существу по направлению к положению L. Направление 710 совпадает с назначенной долготой, или орбитальной позицией, спутника 700, также называемой надирным (Na) направлением, и с продольной осью спутника 700, также называемой зенитно-надирным (Ze-Na) направлением. Во внешней системе координат, ось, проходящая через спутник 700 и параллельная направлению север-юг Земли, обозначается осью N-S спутника, в то время как ось, проходящая через спутник 700 и перпендикулярная стрелке 710 и оси N-S спутника, называется осью E-W спутника, где восточное направление указывает на восток Земли, и западное направление указывает на запад Земли. Соответственно, ось E-W спутника лежит по существу в плоскости орбиты 7000.
Геостационарным спутникам требуется сохранять присвоенную им позицию в геостационарном поясе (орбите 7000) с допускаемым окном SATОКНО отклонения от точного положения на орбите 7000, как изображено схематично на Фиг. 7B. Допускаемое окно образовано двумя граничными N-S линиями 7000A, 7000B, которые параллельны и образованы на каждой стороне орбиты 7000, и двумя граничными E-W линиями 7000C, 7000D, образованными на западном и восточном концах SATОКНО.
Задача удержания геостационарного спутника внутри границ его SATОКНО, называемая удержанием заданной точки (или УЗТ), выполняется самим спутником, используя свои бортовые средства и источники питания. Спутники на геостационарной орбите (ГСО) должны часто смещаться в различных направлениях на протяжении всего срока их службы, для того чтобы оставаться в пределах их позиции/окна, противодействуя различным гравитационным силам и силам давления солнечных лучей, которые изменяют их номинальное положение, или заданную точку, на идеальной круговой орбите. Главная коррекция при удержании заданной точки (УЗТ) требуется при изменениях наклона в направлении север-юг (N-S), сталкивающих спутник с экваториальной плоскости. Эта N-S коррекция требует изменения скорости, которая добавляет в целом до около 50 метров/секунду (м/с) ежегодно (эквивалентно воздействию 50 Ньютон-секунд в течение года на каждый килограмм массы корпуса спутника).
Другой важной коррекцией, хотя на около одного порядка по величине меньшей, является коррекция в направлении восток или запад (E/W). В зависимости от значения номинальной долготы спутника, коррекции орбитальной скорости, требуемые для E/W коррекции, достигают 3 м/с ежегодно. Геостационарные коммерческие спутники обычно использую УС смещения, используя свою бортовую силовую систему. Когда у них практически закончилось топливо, операторы должны завершить срок службы ComSat и использовать оставшееся на борту топливо для изменения орбиты спутника на орбиту 'захоронения', используя специально выделенный остаток топлива. Это необходимо, даже если вся эксплуатационная функциональность не повреждена, в противном случае ComSat будет смещаться из его заданной точки, потеряет свою линию связи с его наземной станцией, и в конечном счете помешает или даже столкнется с другим космическим аппаратом. Изменение орбиты в остальном полностью функционального ComSat является дорогим решением потребности в удержании заданной точки.
Согласно вариантам выполнения настоящего изобретения, удержание заданной точки больших спутников, имеющих небольшое количество или не имеющих топливо, выполняется используя небольшие и микро буксировочные или сервисные спутники, в конфигурации, которая включает в себя только два или три электрических двигателя для удержания заданной точки. Специальные признаки, которые позволяют N-S и E/W маневры для удержания заданной точки, будут описаны теперь подробно.
Обычный способ выполнить удержание заданной точки сервисным спутником состоит в пристыковке к заданному спутнику посредством жесткой и лишенной степеней свободы стыковочной системы. Затем тандем может перемещаться, используя массив из множества двигателей, расположенных в различных положениях на сервисном спутнике. Каждая комбинация будет обеспечивать тягу в различных главных направлениях, и точная настройка величины тяги в каждом двигателе этой комбинации будет обеспечивать точную настройку направления тяги. Этот массив силовых устройств часто вмонтируется в спутники для достижения гибкости управления, требуемой для маневрирования с полными шестью степенями свободы.
Согласно вариантам выполнения настоящего изобретения, особенно эффективно выполнять операцию по удержанию заданной точки, поддерживаемую стыковочными и буксировочными конструкциями, описанными выше в отношении Фиг. 2A - Фиг. 6C, включительно. Существуют несколько известных способов использования внешней тяги для удерживания ComSat на его назначенной позиции, большая часть из которых включает в себя от четырех до шести двигателей. Способ, описанный далее, требует только двух двигателей. Следующие признаки стыковочных и буксировочных конструкций, приведенных выше, которые могут быть использованы для удержания заданной точки, являются:
осевой симметрией стыковочной системы сервисного спутника по отношению к зенитно-надирной (Ze-Na) оси обслуживаемого спутника. Это достигнуто просто посредством стыковки стыковочного шпангоута (СШ) обслуживаемого спутника, который по своей природе является круглым. Это может быть выполнено посредством развертывания радиально противоположных захватывающих рычагов (симметричное развертывание не требуется). Кроме того, сервисный спутник может сохранять устойчивость при любом требуемом угле вращения (угле рыскания). Согласно предпочтительным вариантам выполнения изобретения, каждый из захватывающих рычагов перемещается независимо от других. Таким образом, симметричное развертывание захватывающих рычагов не требуется, даже во время стыковки. Скорее, радиально противоположные или равноудаленные захватывающие рычаги позволяют стыковку и повторную стыковку в любом относительном угловом положении вокруг главной продольной Ze-Na оси между сервисным и обслуживаемым спутниками. Это может быть выполнено, например, посредством небольшого ослабления захвата захватывающих рычагов на шпангоуте, поворота сервисного спутника относительно обслуживаемого спутника посредством маховиков в его механизме управления ориентацией, и затягивания захвата захватывающих рычагов в новом положении под выбранным углом рыскания относительно обслуживаемого спутника.
Некоторые угловые степени свободы имеются между Ze-Na осью обслуживаемого спутника и Ze-Na осью сервисного спутника. В примере стыковочной системы, описанной выше, этот может быть достигнуто посредством настройки длина каждого из захватывающих рычагов на требуемую длину, так чтобы стыковочный шпангоут был прикреплен надежно, так что небольшой относительный угол имеется между его осью (которая совпадает с Ze-Na осью обслуживаемого спутника) и Ze-Na осью сервисного спутника. Это также может быть достигнуто несколькими другими способами, такими как обеспечение угловых степеней свободы посредством установки двигателей на отдельный наклонный механизм.
Теперь ссылка делается на Фиг. 8, которая схематично изображает двигатели 8010 и 8022, работающие в режиме удержания заданной точки, после того как сервисный спутник 8000 состыковался с обслуживаемым спутником 8040, согласно вариантам выполнения настоящего изобретения. Сервисный спутник 8000 показан состыкованным со стыковочным шпангоутом 8042 на зенитной поверхности обслуживаемого спутника 8040, таким образом чтобы не перекрывать линию радиовидимости антенн обслуживаемого спутника с наземной станцией на земле. В этом варианте выполнения, сервисный спутник 8000 снабжен двумя двигателями 8010 и 8022 для удержания заданной точки. Двигатель 8010 и компенсирующий двигатель 8022 могут являться электрическими двигателями, питаемыми, например, электрической энергией, собираемой солнечными панелями 8004 сервисного спутника 8000. Плоскость Na-Ze/N-S обозначена на Фиг. 8 серой плоскостью, окруженной тонкой пунктирной линией. Плоскость Na-Ze/N-S пересекает по существу середину обслуживаемого спутника 8040 и по существу середину сервисного спутника 8000, так чтобы плоскость Na-Ze/N-S пересекала вблизи общего центра масс (jCoG) комбинации сервисного спутника 8000 и обслуживаемого спутника 8040, как описано здесь подробно ниже.
Двигатель 8010 расположен на одном из внешних торцов корпуса сервисного спутника 8000 вблизи надирной стороны сервисного спутника 8000, так чтобы после стыковки к обслуживаемому спутнику 8040 он располагался вблизи обслуживаемого спутника. Предпочтительно, двигатель 8010 расположен так, что направление 8010A его тяги лежит в пределах плоскости Na-Ze/N-S. Компенсирующий двигатель 8022 установлен на конце стрелы 8020 для компенсирующего двигателя. Предпочтительно, стрела 8020 для компенсирующего двигателя является развертывающейся стрелой. Механизм развертывания может включать в себя спиральную трубку, которая выполнена с возможностью выполнения требуемого вращения и также может перемещать топливо из топливного резервуара к развернутому двигателю. (Смотри, например, Фиг. 1C.) Рычаг 8020 для компенсирующего двигателя установлен на стороне сервисного спутника 8000 посредством шарнирного соединения 8023, так чтобы рычаг 8020 двигателя мог храниться в сложенном положении смежно корпусу сервисного спутника, до тех пор пока не потребуется смещение для удержания заданной точки. (В сложенном положении, значение αРЫЧАГ, угла между корпусом спутника и горизонтальной осью рычага 8020 для компенсирующего двигателя, равно нулю или близко к нулю).
Когда требуется провести операцию по удержанию заданной точки, рычаг 8020 для компенсирующего двигателя разворачивается и поворачивается в открытое и выдвинутое положение. Таким образом, рычаг для компенсирующего двигателя поворачивается до тех пор, пока угол αРЫЧАГ не достигнет своего значения для удержания заданной точки. Когда рычаг 8020 для компенсирующего двигателя находится в его положении удержания заданной точки (то есть в его выдвинутом положении), компенсирующий двигатель 8022 может быть расположен так, чтобы его тяга 8022A лежала в пределах плоскости Na-Ze/N-S. Эта конструкция особенно подходит для небольших/микроспутников, которые должны стремиться в сложенном положении к ограничениям объема вспомогательной нагрузки как изображено, в то же время обеспечивая обслуживание в течение режима удержания заданной точки намного большего количества спутников связи, имеющих массу до 15 раза превышающую массу самого сервисного спутника. Если требуется, двигатель может быть обеспечен, чтобы позволить открытие стрелы двигателя на один из нескольких выбранных углов.
Ссылка делается на Фиг. 9, которая схематично изображает положение и направления работы двигателя 8010 и компенсирующего двигателя 8022, согласно вариантам выполнения настоящего изобретения. Согласно вариантам выполнения настоящего изобретения, масса и объем сервисного спутника 8000 в среднем на порядок меньше массы и объема обслуживаемого спутника, таким образом общий центр масс (jCoG) тандема очень близок к центру тяжести (CoG) одного обслуживаемого спутника. Двигатель 8010 расположен на расстоянии DРЫЧАГ_ДВИГ от точки общего центра масс. Компенсирующий двигатель 8022 расположен на расстоянии DРЫЧАГ_КОМПЕНС_ДВИГ от общего центра масс в том же направлении, что и DРЫЧАГ_ДВИГ. Как видно на Фиг. 9, DРЫЧАГ_КОМПЕНС_ДВИГ превышает DРЫЧАГ_ДВИГ. Следовательно, для того чтобы сохранить нулевой угловой момент относительно общего центра масс как центра вращения, компонент 8022B компенсирующей тяги 8022A, перпендикулярный продольной линии 8002, проходящей через точку общего центра масс, должен быть меньше компонента части 8010A тяги 8010, который уравновешивает его. Тяга 8010 может быть направлена, в пределах плоскости страницы, немного не под прямым углом относительно продольной линии 8002. Тяга 8010 может быть разложена на первый компонент 8010A, перпендикулярный линии 8002 и направленной на юг, и второй компонент 8010B, параллельный линии 8002 и направленный к общему центру масс. Компенсирующая тяга 8022A может быть разложена на первый компонент 8022B, перпендикулярный линии 8002 и направленный на север, и второй компонент 8022C, параллельный линии 8002 и направленный от общего центра масс. Величина 8010B может быть равна величине 8022C и, будучи направленными в противоположных направлениях, они могут взаимно компенсировать друг друга. Результирующая векторная сумма 8010A и 8022A дает вектор 8030. Поскольку величина 8022B задана для компенсации крутящего момента относительно точки общего центра масс, работа вектора 8030 может быть представлена, как действующей непосредственно на точку общего центра масс. В примере с Фиг. 9, он действует в направлении на юг. Следует понимать, что поскольку векторы 8010 и 8022A тяги действуют в пределах плоскости, которая также включает в себя точку общего центра масс, результирующее перемещение комбинации сервисного спутника 8000 и обслуживаемого спутника 8040 осуществляется только на юг, и не приводя к вращательным перемещениям в плоскости страницы или перпендикулярно плоскости страницы. Следует понимать, что приведенная выше конструкция разработана, так как ожидается, что компенсация углового момента комбинации двух спутников не может быть выполнена только посредством маховиков, даже больших и тяжелых маховиков.
Согласно вариантам выполнения настоящего изобретения, компенсирующая тяга 8022A должна быть как можно меньшей, чтобы оставить наибольшую результирующую тягу 8030 для выполнения задачи удержания заданной точки. Соответственно, компенсирующий двигатель должен быть расположен как можно дальше от обслуживаемого спутника 8040, для того чтобы усилить его результирующий момент. Чтобы позволить такое большое расстояние в микроспутнике, таком как спутник 8000, рычаг 8020 удерживает компенсирующий двигатель на своем конце, далеко от двигателя 8010, предпочтительно на по меньшей мере двойном расстоянии от точки общего центра масс. Следовательно, компенсирующая тяга 8022B составляет около половины тяги 8010A, приводя к результирующей N-S тяге, составляющей около половины главной тяги. Компенсирующая тяга может регулироваться системой управления (не показана) на основе, например, от датчиков перемещения/угловых датчиков с обратной связью, показывающих результирующие перемещения, до тех пор пока крутящий момент относительно точки общего центра масс в плоскости странице, в примере с Фиг. 9, не уменьшится до нуля, или по меньшей мере до уровня, с котором может справиться оборудование для контроля за ориентацией. Предпочтительно, рычаг для компенсирующего двигателя разворачивается уже во время орбитальных испытаний перед стыковкой, так чтобы не препятствовать процессу стыковки.
Использование ежедневной тяги на север или на юг является системным решением, соответствующем задаче, и зависит от силы притяжения солнца, которая действует по направлению к северу с 21 марта по 21 сентября, и по направлению к югу в течение второй половины года. Более того, время приведения в действие всегда совпадает с нахождением спутника вблизи одного из узлов орбитали, либо восходящего узла (ВУ), определяемого как пересечение экватора с юга на север, либо нисходящего узла (НУ), определяемая как пересечение экватора с севера на юг. Этот позволяет одному двигателю, который всегда работает в одном и том же направлении, изменять наклоны как в северном, так и в южном направлениях. Альтернативно, сервисный спутник может быть повернут на угол рыскания в 180°, для того чтобы обеспечить необходимую тягу в направлении полета в течение всего года.
Как показано на Фиг. 9 и на следующих чертежах, предполагается, что результирующая требуемая тяга должна быть направлена на юг. Количество энергии и мощности, требуемой для использования ежедневных S/N коррекций достаточно значительно, в особенности учитывая то, что масса обслуживаемого спутника 8040 намного превышает массу сервисного спутника 8000. Следовательно, использование электрических (например, ионных) двигателей является практичным, эффективным решением, в особенности там, где относительно большое количество электричества может быть направлено на двигатели.
Для того чтобы выполнить E/W коррекцию, необязательно обеспечить один или два дополнительных двигателя, как изображено в отношении N/S коррекций положения. Поскольку энергия, мощность и продолжительность, требуемые для выполнения E/W, намного меньше, преимущество может быть извлечено из осевой симметрии стыковочного шпангоута 8042 обслуживаемого спутника 8040. Ссылка делается на Фиг. 10, которая схематично изображает выполнение E/W коррекций орбиты обслуживаемого спутника, согласно вариантам выполнения настоящего изобретения. Сервисный спутник 8000 и обслуживаемый спутник 8040 показаны на Фиг. 10 вдоль их продольных осей, показанных в их N/S - E/W плоскости. Аналогично тому, как описано в отношении Фиг. 9, результирующий вектор 8030 может быть получен путем надлежащей работы и направления двигателя 8010A и компенсирующего двигателя 8022A, действующих в Na-Ze/N-S плоскости с нулевым крутящим моментом относительно точки общего центра масс. Как видно на Фиг. 10, относительное положение сервисного спутника 8000 может быть изменено относительно обслуживаемого спутника 8040, так чтобы плоскость, в которой действует результирующий вектор 8030 тяги, была повернута в N-S/E-W плоскости немного от N-S плоскости на угол γСМЕЩ_S/N. Вследствие этого смещения от S-N плоскости, вектор 8030 тяги может быть разложен на главный компонент 10010A и E/W компонент 10010B. Поскольку γСМЕЩ_S/N относительно очень мал, до 3 градусов, главный компонент 10010A, действующий в направлении на юг в примере с Фиг. 10, намного превышает E-W компонент 10010B, действующий в E-W направлении, что верно, поскольку обычно E-W коррекции намного меньше и менее часты. Точное соотношение между требуемыми N-S коррекциями и требуемыми E-W коррекциями зависит от конкретного обслуживаемого спутника и назначенной долготной позиции, присвоенной ему. Для того чтобы позволить сервисному спутнику 8000 обслуживать любые обслуживаемые спутники в ассортименте, сервисному спутнику должно быть позволено задавать любое требуемое значение угла γСМЕЩ_S/N. Это может быть легко выполнено посредством легких коррекций относительного углового положения сервисного спутника 8000 относительно обслуживаемого спутника 8040, используя, например, маховики, известные в данной области техники, для того чтобы управлять углом поворота сервисного спутника 8000 перед стыковкой с обслуживаемым спутником, или во время решения задачи удержания его в заданной точке, как может потребоваться.
Теперь будет описан этап изменения орбиты для перемещения истощенного спутника с ГСО на орбиту захоронения. Этот этап использует все параметры, которые были собраны во время измерений после стыковки, выполненные на этапе удержания заданной точки. Это обеспечит точную работу двигателей. Сервисный спутник будет перемещать обслуживаемый спутник на орбиту захоронения (на от 230 до 300 км выше пояса ГСО). Этот маневр будет выполнен, главным образом, используя зенитный электрический двигатель 101. В общем, способ включает в себя изменение направления тяги состыкованных сервисного спутника и обслуживаемого спутника, затем включение двигателя для создания вектора тяги для перемещения состыкованных сервисного спутника и обслуживаемого спутника в измененном направлении полета. Ориентация двигателей регулируется так, чтобы вектор тяги проходил через общий центр масс сервисного спутника и обслуживаемого спутника. Когда состыкованные сервисный спутник и обслуживаемый спутник достигают требуемой орбитальной позиции, сервисный спутник отстыковывается от обслуживаемого спутника и может быть направлен к следующему обслуживаемому спутнику. Более конкретно, этап изменения орбиты начнется с маневра по тангажу на восток в направлении геостационарной переходной орбиты (ГПО), который будет выполнен системой управления ориентации обслуживаемого спутника. Затем, сервисный спутник будет инициировать маневр на полной мощности, используя свой зенитный электрический двигатель. В конце этого этапа оба спутника достигнут орбиты захоронения на выбранной долготе. Небольшие регулировки могут быть выполнены для поддержания обслуживаемого спутника на требуемой орбите. В то время как оба спутника находятся на орбите захоронения, сервисный спутник будет медленно открывать свои захватывающие рычаги, чтобы сначала ослабить захват, и затем, когда обслуживаемый спутник будет стабилен, рычаги полностью откроются, чтобы полностью отделиться от обслуживаемого спутника. После отделения, сервисный спутник вернется на свободную позицию в поясе ГСО, чтобы ожидать там следующую задачу на обслуживание.
Теперь будет описано сведение с орбиты для удаления обслуживаемого спутника с НОО путем сталкивания его вниз в атмосферу для сгорания или падения на Землю. Параметры, собранные во время предыдущих маневров обслуживаемого спутника сервисным спутником, помогают планировать и обеспечивать точный маневр сведения с орбиты, чтобы исключить любые проблемы безопасности, связанные с возвращением в атмосферу. В общем, способ включает в себя изменение направления тяги состыкованных сервисного спутника и обслуживаемого спутника и запуск двигателя для создания вектора тяги для перемещения состыкованных сервисного спутника и обслуживаемого спутника в измененном направлении. Ориентация двигателей регулируется так, чтобы вектор тяги проходил через общий центр масс сервисного спутника и обслуживаемого спутника. Когда состыкованные сервисный спутник и обслуживаемый спутник достигают требуемой долготы, двигатели сервисного спутника запускаются для замедления состыкованных спутников. Когда они достигают траектории падения, сервисный спутник отстыковывается от обслуживаемого спутника и возвращается на выбранную орбиту. Более конкретно, сначала сервисный спутник будет толкать обслуживаемый спутник как необходимо согласно плановому месту сведения с орбиты, чтобы придать ему корректный наклон, и затем ожидать достижения корректной долготы. По мере того, как он подходит к плановому месту сведения с орбиты, тандем изменит свою ориентацию, либо используя силовую систему сервисного спутника, либо посредством маховиков обслуживаемого спутника, таким образом главный толкающий двигатель сервисного спутника будет направлен по курсовой траектории. В плановое время сервисный спутник приведет в действие подходящий тормозной импульс и непосредственно после этого отделится от обслуживаемого спутника. Обслуживаемый спутник будет сведен с орбиты согласно плану, в то время как сервисный спутник может восстановить свою ориентацию и вновь вернуться за счет тяги на сервисную орбиту для следующей задачи.
Когда конструкция и нагрузка обслуживаемого спутника помещает его общий центр масс вне плоскости тяги, формируемой, когда сервисный спутник выравнен с обслуживаемым спутником (то есть, когда их продольное оси совпадают), прикладывание тяги может вызвать нежелательное угловое перемещение обслуживаемого спутника. Угловые перемещения также могут быть вызваны несовпадением ориентации двигателей, или несовпадениями векторов тяги вследствие износа двигателей. Для того чтобы преодолеть эти нежелательные вращательные перемещения или крутящие моменты без чрезмерного использования сохранения момента посредством, например, реактивных колес или противотяг, выступ каждого из захватывающих рычагов, таких как рычаги 404 с Фиг. 4A-4E, может быть задан так, чтобы сервисный спутник занял некоторое угловое положение относительно обслуживаемого спутника. Таким образом, плоскости тяги будет проходить через фактический общий центр масс комбинации сервисного спутника и обслуживаемого спутника, как описано в отношении Фиг. 6A-6C.
Следует понимать, что изменение направления тяги может быть осуществлено посредством приведения в действие маховиков обслуживаемого спутника. Альтернативно, изменение направления тяги может быть осуществлено посредством вторичной силовой системы, то есть множества двигателей, расположенных вокруг корпуса сервисного спутника.
Несмотря на то, что выше изобретение было описано в отношении стыковки со стыковочным шпангоутом обслуживаемого спутника, следует понимать, что альтернативно сервисный спутник может стыковаться с другим выбранным, заданным элементом, который является частью обслуживаемого спутника, с соответствующими конструктивными изменениями.
Несмотря на то, что некоторые признаки изобретения были изображены и описаны здесь, множество модификаций, замен, изменений и эквивалентов теперь возникнут у средних специалистов в данной области техники. Следовательно следует понимать, что прилагаемые пункты формулы изобретения охватывают все такие модификации и изменения, подпадающие под истинную сущность изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОБСЛУЖИВАЮЩИЙ СПУТНИК ДЛЯ ОБЕСПЕЧЕНИЯ ОРБИТАЛЬНЫХ УСЛУГ, ИСПОЛЬЗУЮЩИЙ ПЕРЕМЕННОЕ УПРАВЛЕНИЕ ДВИГАТЕЛЯМИ | 2018 |
|
RU2765039C2 |
| ОБСЛУЖИВАЮЩИЙ СПУТНИК ДЛЯ ОБЕСПЕЧЕНИЯ ОРБИТАЛЬНЫХ УСЛУГ, ИСПОЛЬЗУЮЩИЙ ПЕРЕМЕННОЕ УПРАВЛЕНИЕ ДВИГАТЕЛЯМИ | 2022 |
|
RU2795894C1 |
| ОБСЛУЖИВАЮЩИЙ СПУТНИК ДЛЯ ОБЕСПЕЧЕНИЯ ОРБИТАЛЬНЫХ УСЛУГ, ИСПОЛЬЗУЮЩИЙ ПЕРЕМЕННОЕ УПРАВЛЕНИЕ ДВИГАТЕЛЯМИ | 2018 |
|
RU2772500C2 |
| ОБСЛУЖИВАЮЩИЕ УСТРОЙСТВА КОСМИЧЕСКОГО АППАРАТА И СООТВЕТСТВУЮЩИЕ УЗЛЫ, СИСТЕМЫ И СПОСОБЫ | 2018 |
|
RU2765040C2 |
| ОБСЛУЖИВАЮЩИЕ УСТРОЙСТВА КОСМИЧЕСКОГО АППАРАТА И СООТВЕТСТВУЮЩИЕ УЗЛЫ, СИСТЕМЫ И СПОСОБЫ | 2018 |
|
RU2765065C2 |
| ОБСЛУЖИВАЮЩИЕ УСТРОЙСТВА КОСМИЧЕСКОГО АППАРАТА И СООТВЕТСТВУЮЩИЕ УЗЛЫ, СИСТЕМЫ И СПОСОБЫ | 2018 |
|
RU2765021C2 |
| Космический комплекс для утилизации группы объектов крупногабаритного космического мусора | 2018 |
|
RU2695155C1 |
| УСТРОЙСТВО ДЛЯ ДОСТАВКИ ТУРИСТОВ С ОКОЛОЛУННОЙ ОРБИТЫ НА ПОВЕРХНОСТЬ ЛУНЫ И ПОСЛЕДУЮЩЕГО ВОЗВРАЩЕНИЯ НА ЗЕМЛЮ | 2019 |
|
RU2730700C1 |
| Космическая инфраструктура для обслуживания космических объектов на геостационарной и более низких орбитах, а также способ обслуживания космических объектов посредством данной инфраструктуры | 2022 |
|
RU2776887C1 |
| КОСМИЧЕСКАЯ ГОЛОВНАЯ ЧАСТЬ ДЛЯ ГРУППОВОГО ЗАПУСКА СПУТНИКОВ | 2010 |
|
RU2428358C1 |
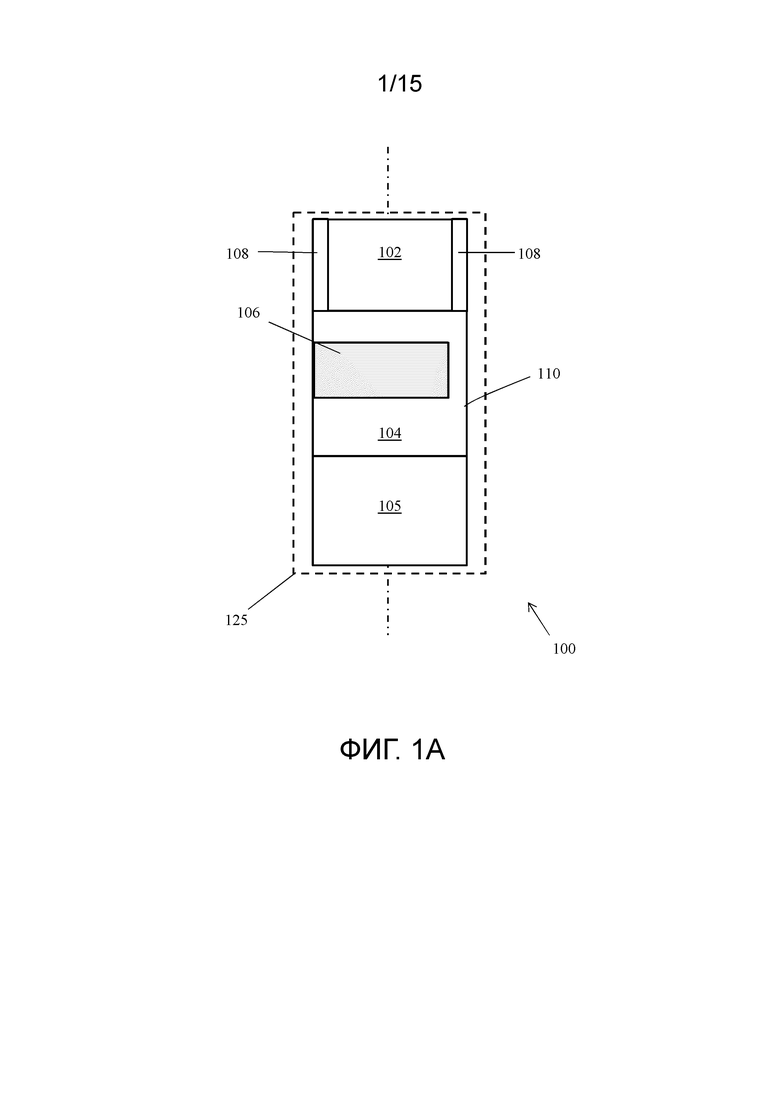
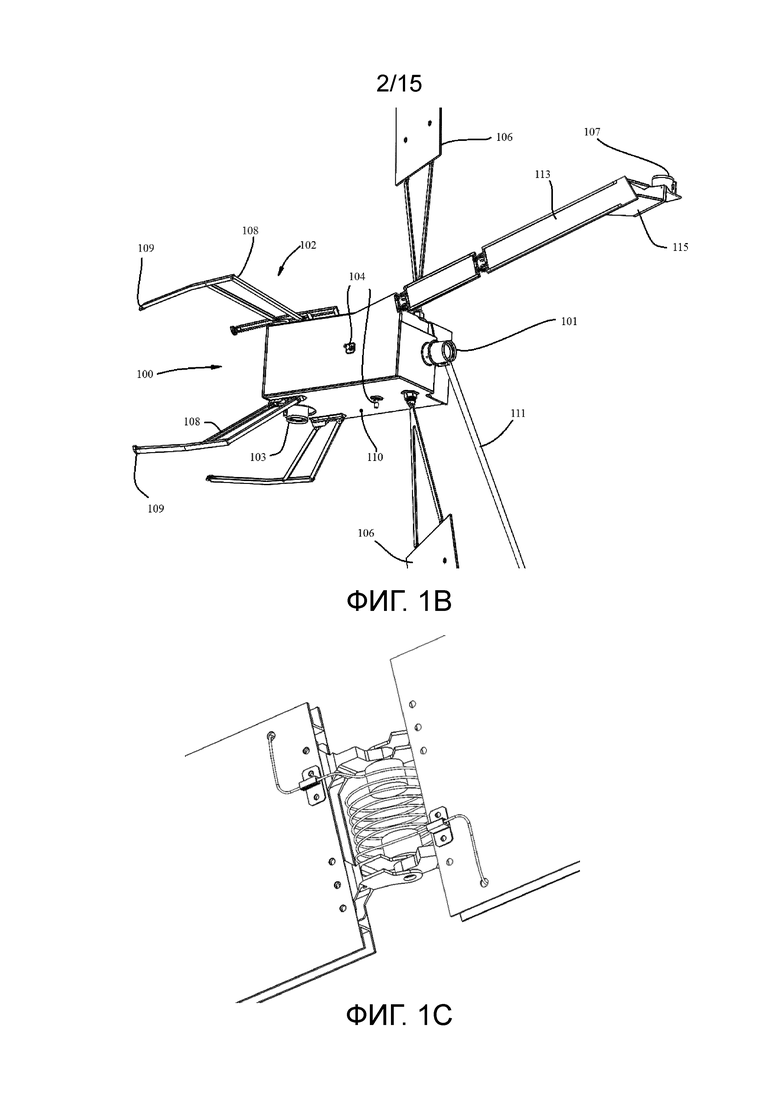
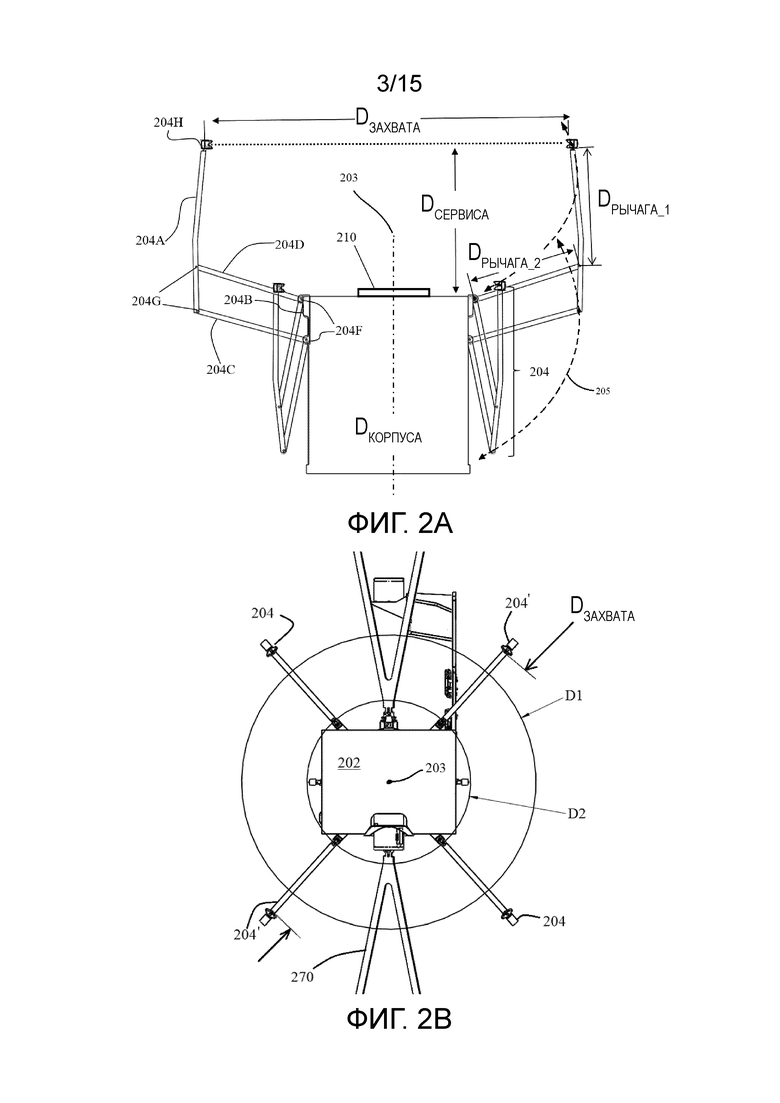
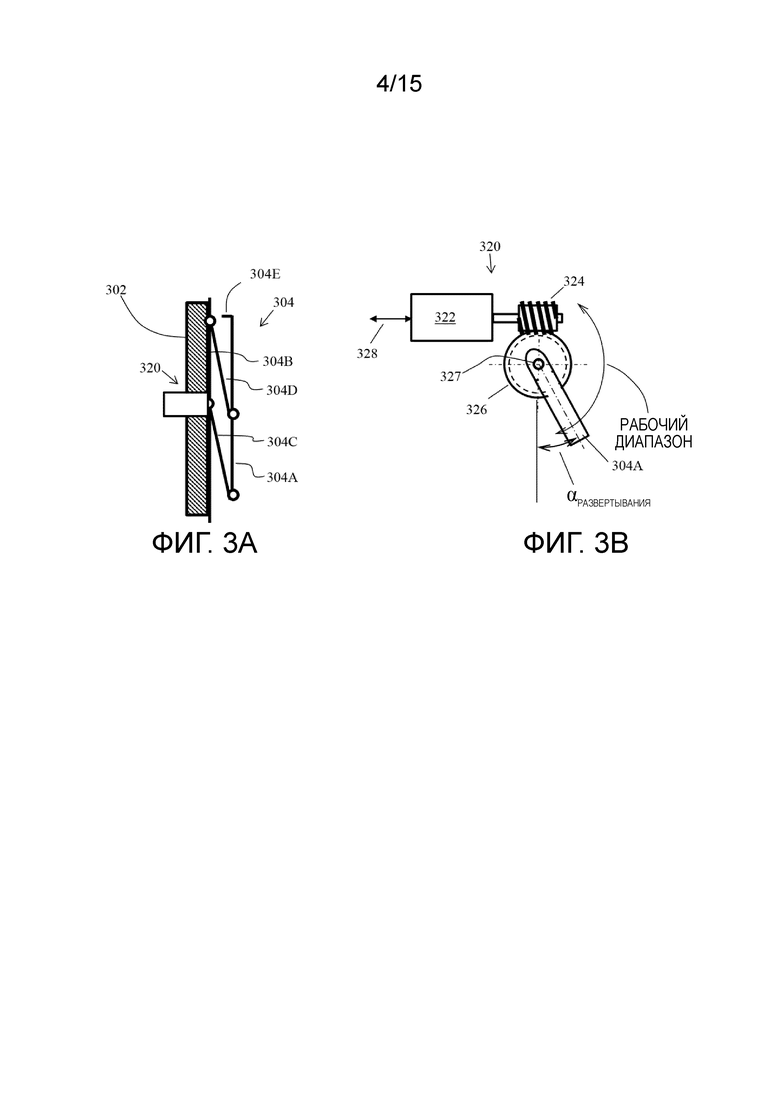
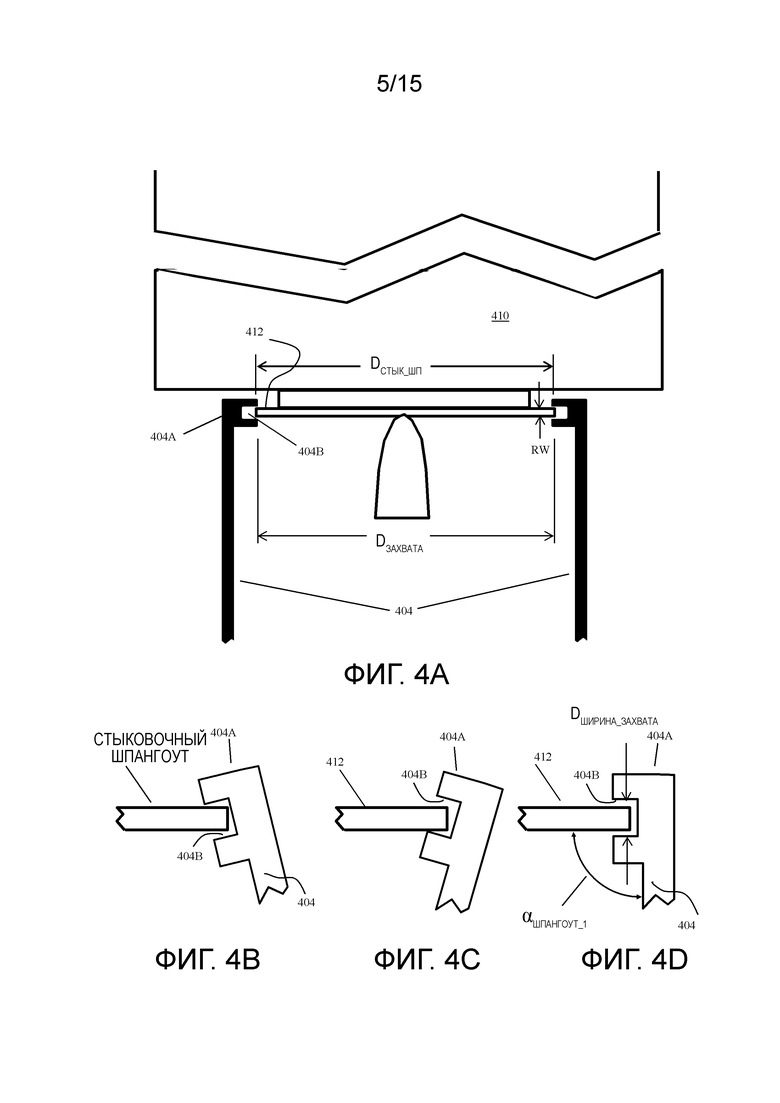

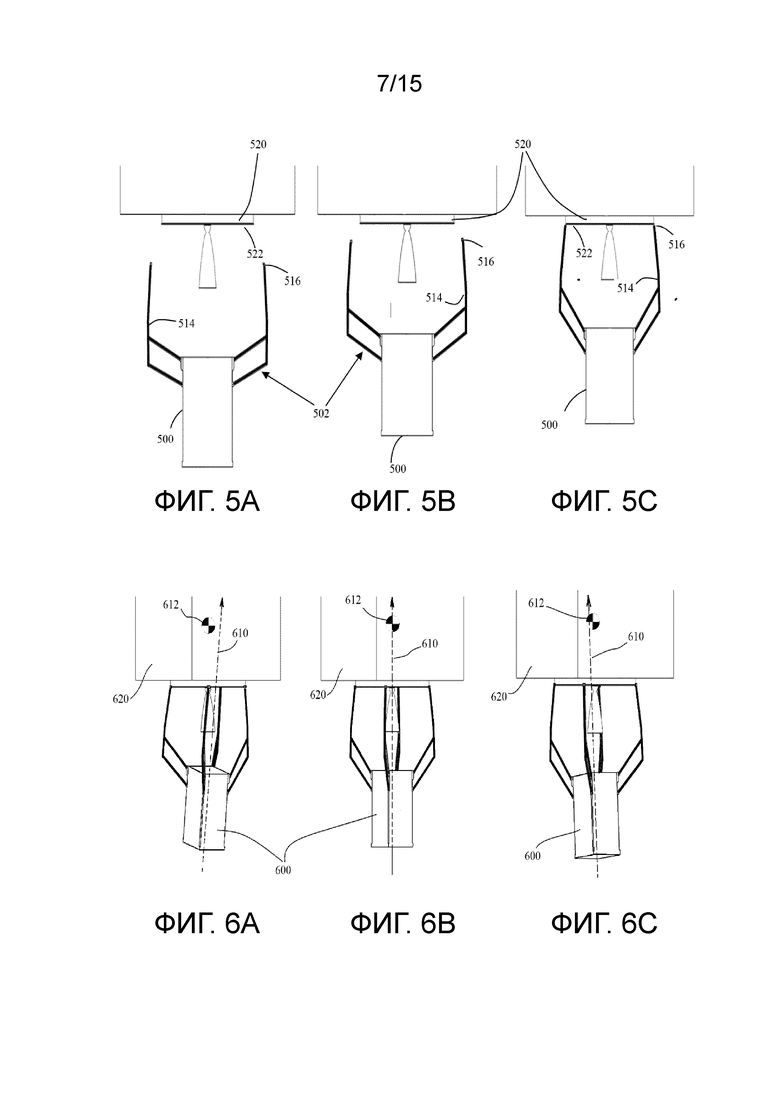
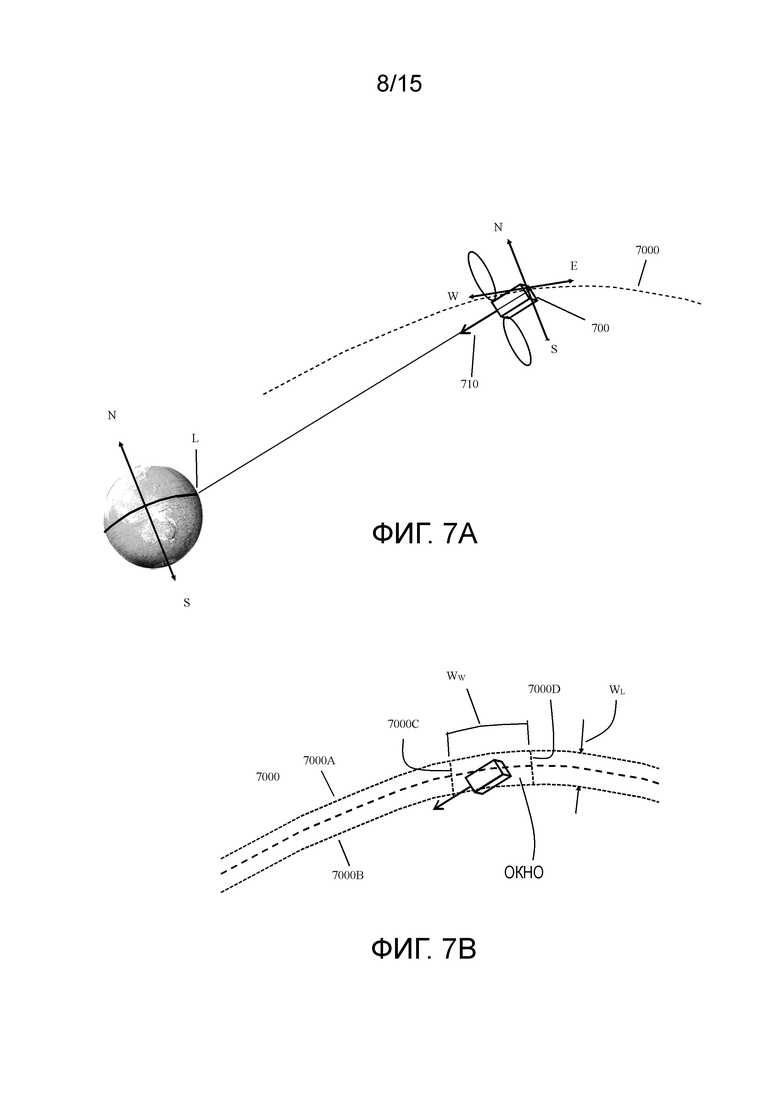
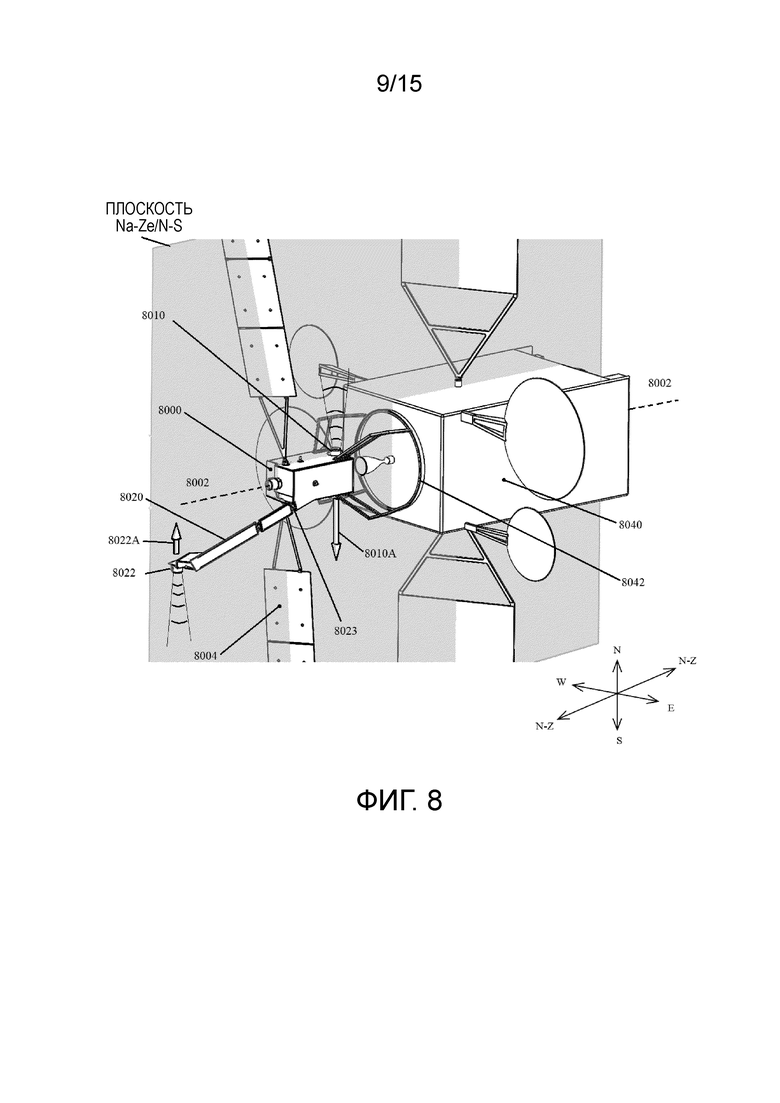
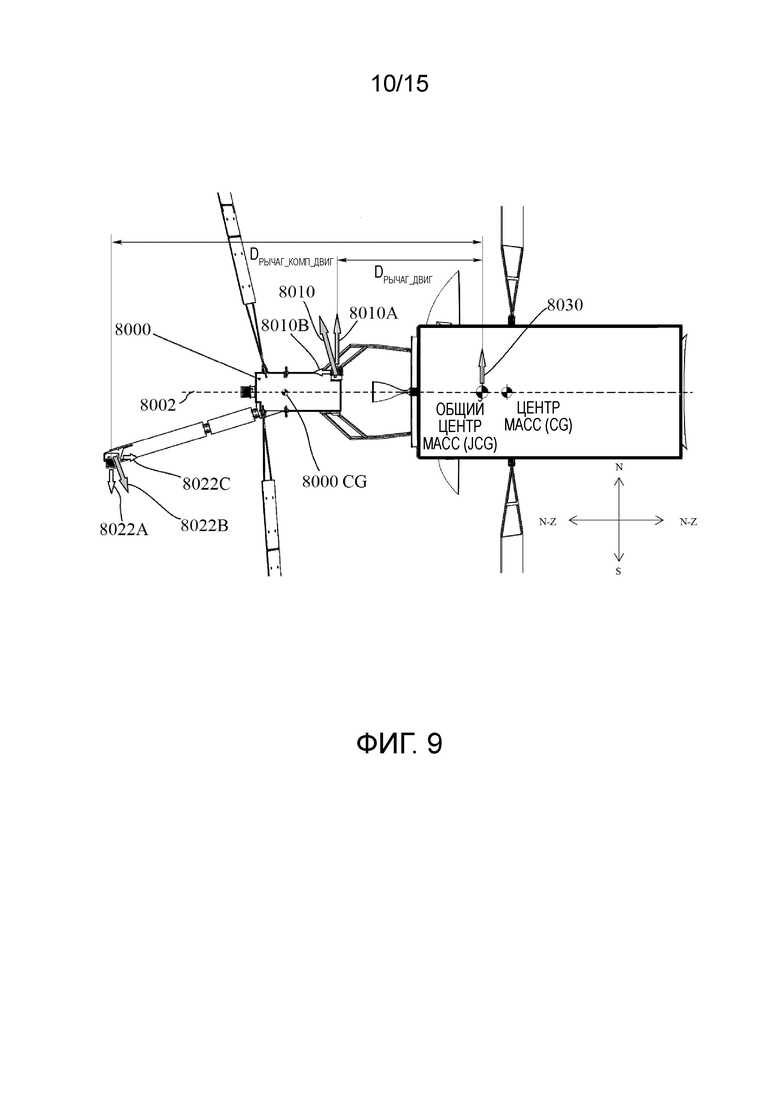
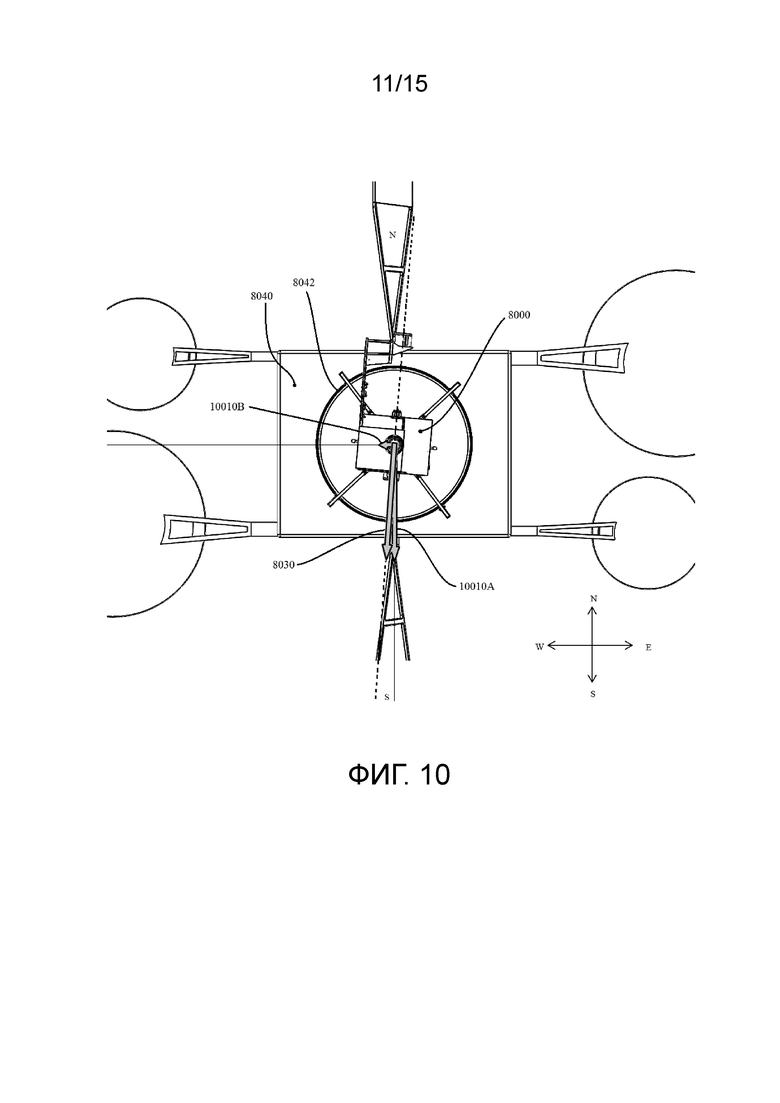

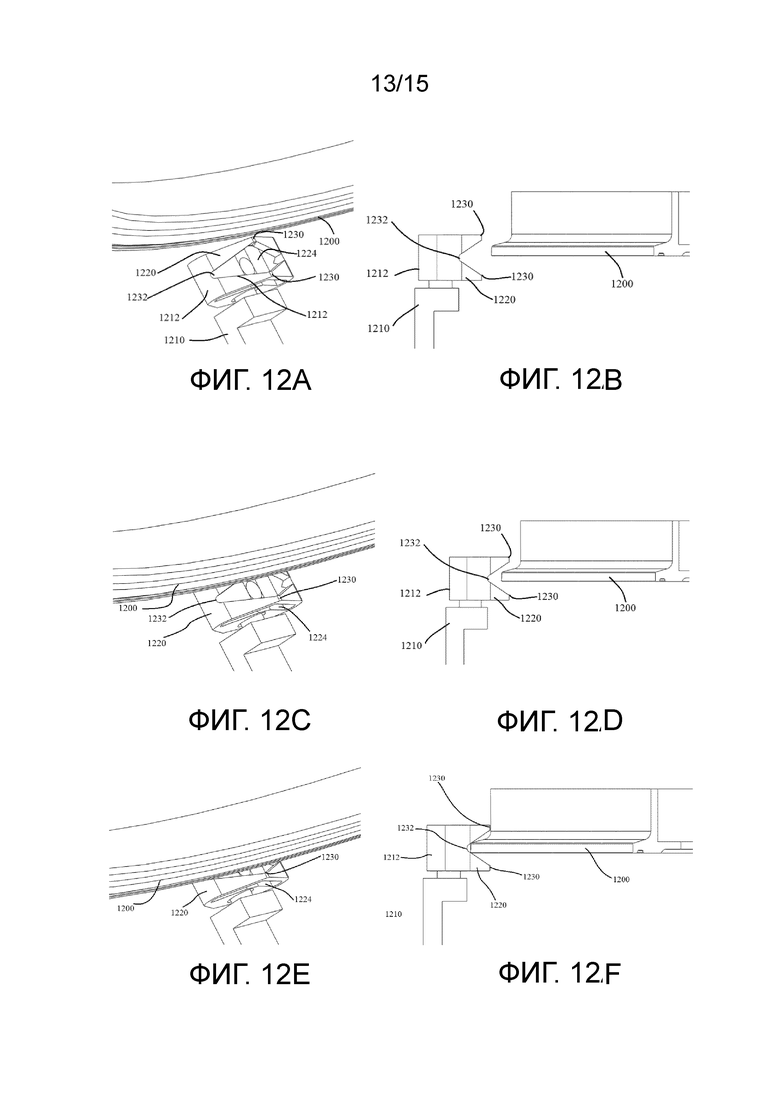
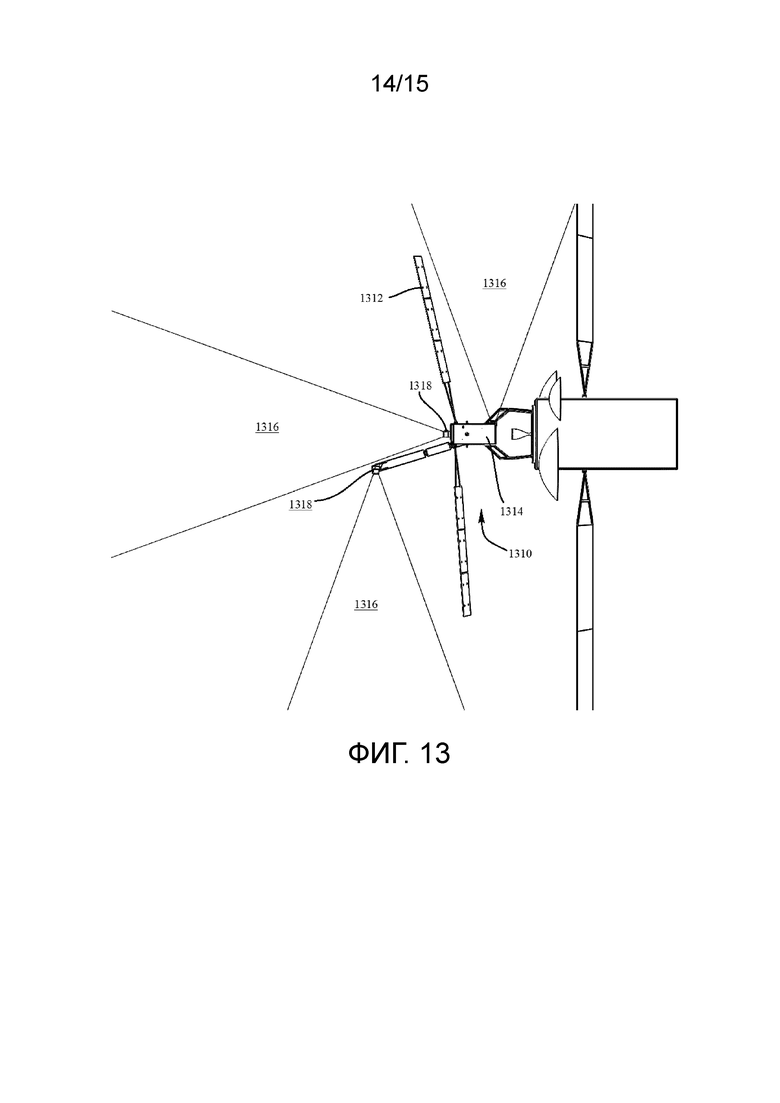
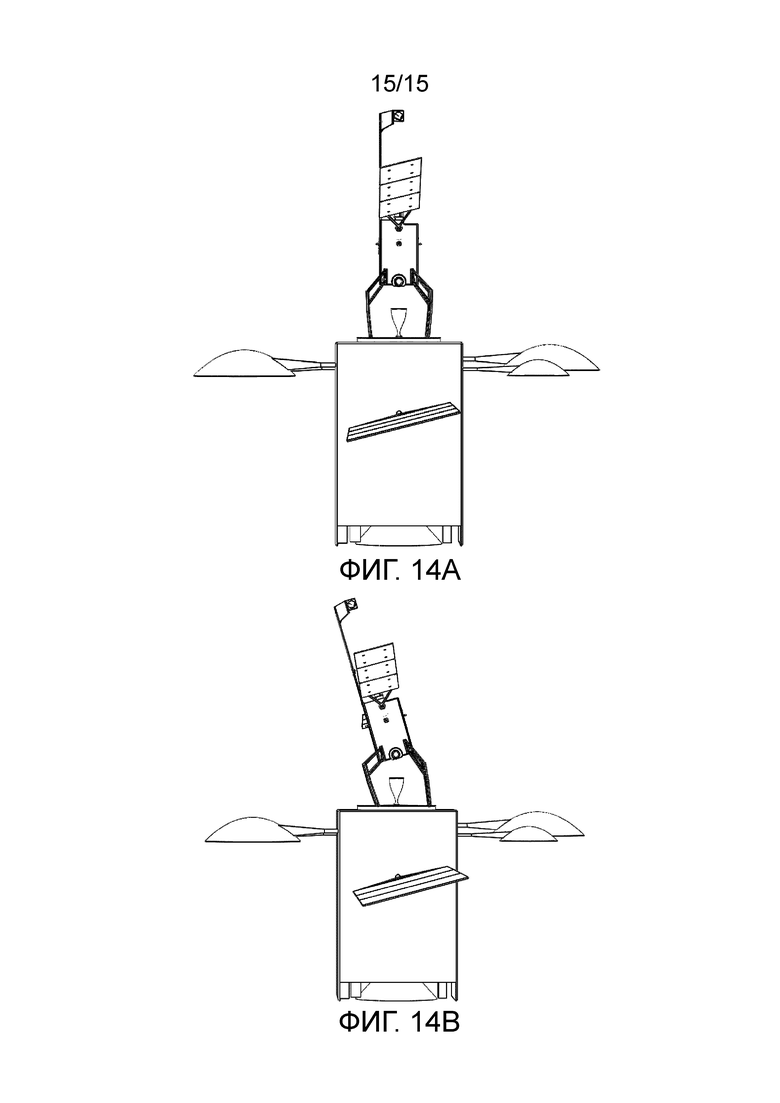
Группа изобретений относится к конструкции и использованию сервисного спутника (СС) (100), снабженного по меньшей мере двумя маневровыми двигателями (101, 103), одним контроллером и двумя стыковочными поворотными относительно корпуса (110) рычагами (108) с концевыми захватами (109). Захваты предназначены для сцепления со стыковочным шпангоутом (не показан), выступающим над поверхностью обслуживаемого орбитального спутника (ОС). Каждый рычаг независимо управляется контроллером, который координирует перемещение рычагов и захват ОС, а также запуск маневровых двигателей (101, 103) для перемещения ОС посредством усилий, прикладываемых через указанный стыковочный шпангоут. Для прецизионной ориентации СС может быть предусмотрен электроракетный двигатель (107) на штанге (113). Технический результат состоит в обеспечении высокой совместимости СС с разнообразными ОС и другими объектами (в т.ч. космическим мусором), имеющими в качестве типичного общего элемента стыковочный шпангоут. 2 н. и 23 з.п. ф-лы, 39 ил.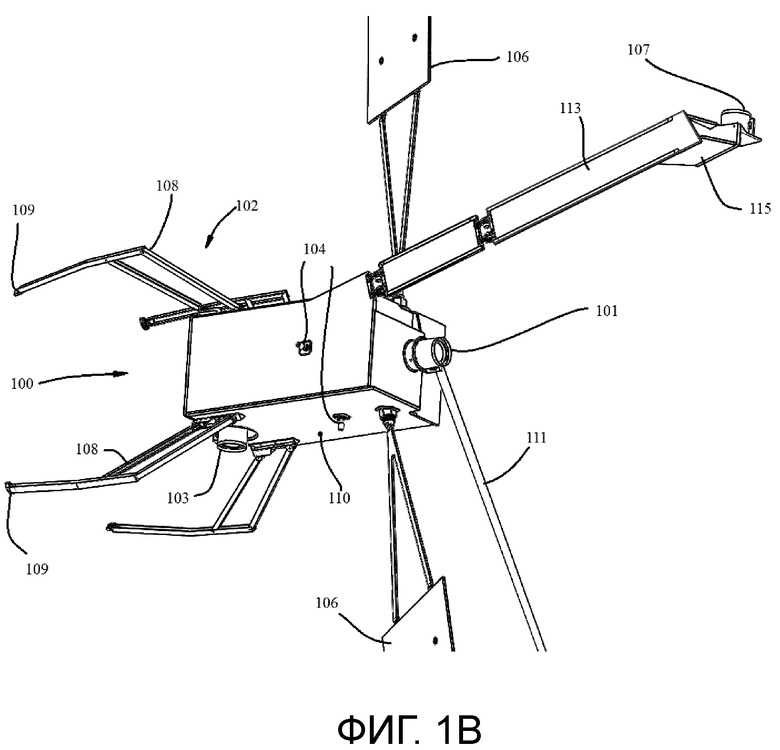
1. Сервисный спутник для обеспечения орбитальных обслуживаний орбитального спутника, содержащий:
корпус;
по меньшей мере два двигателя;
по меньшей мере два стыковочных рычага, присоединенных к корпусу и выполненных с возможностью зацепления со стыковочным шпангоутом, продолжающимся от внешней поверхности орбитального спутника, причем каждый из по меньшей мере двух стыковочных рычагов включает в себя конец для зацепления со шпангоутом, выполненный с возможностью соединения со стыковочным шпангоутом; и
по меньшей мере один контроллер, выполненный с возможностью:
перемещения каждого из по меньшей мере двух стыковочных рычагов для обеспечения возможности соединения конца для зацепления со шпангоутом каждого из по меньшей мере двух стыковочных рычагов со стыковочным шпангоутом по меньшей мере в двух расположенных на расстоянии друг от друга положениях на стыковочном шпангоуте, образуя тем самым соединение между сервисным спутником и орбитальным спутником посредством продолжающегося наружу стыковочного шпангоута и обеспечивая тем самым возможность сервисному спутнику соединяться с орбитальным спутником с образованием тандема; и
координирования запуска указанных по меньшей мере двух двигателей сервисного спутника для перемещения орбитального спутника посредством усилий, прикладываемых через продолжающийся наружу стыковочный шпангоут.
2. Сервисный спутник по п.1, в котором по меньшей мере два стыковочных рычага выполнены с возможностью регулирования, причем по меньшей мере один контроллер выполнен с возможностью регулирования по меньшей мере двух стыковочных рычагов, чтобы таким образом обеспечить наклон между сервисным спутником и орбитальным спутником.
3. Сервисный спутник по п.2, в котором по меньшей мере один контроллер выполнен с возможностью обеспечивать угол наклона до около 4° между сервисным спутником и орбитальным спутником.
4. Сервисный спутник по п.2, в котором по меньшей мере один контроллер выполнен с возможностью инициирования запуска двигателя для перемещения орбитального спутника, в то время как корпус сервисного спутника наклонен относительно орбитального спутника.
5. Сервисный спутник по п.1, в котором соединение является неинтрузивным для орбитального спутника.
6. Сервисный спутник по п.1, в котором по меньшей мере один конец для зацепления со шпангоутом включает в себя углубление, выполненное с возможностью приема стыковочного шпангоута орбитального спутника.
7. Сервисный спутник по п.6, в котором по меньшей мере один конец для зацепления со шпангоутом включает в себя участок, который выполнен с возможностью поворота в пределах углубления стыковочного шпангоута.
8. Сервисный спутник по п.7, в котором по меньшей мере другой участок конца для зацепления со шпангоутом поджат пружиной к стыковочному шпангоуту.
9. Сервисный спутник по п.1, в котором по меньшей мере один контроллер дополнительно выполнен с возможностью регулирования расстояния между по меньшей мере двумя стыковочными рычагами для обеспечения взаимодействия по меньшей мере двух стыковочных рычагов для зажатия стыковочного шпангоута орбитального спутника.
10. Сервисный спутник по п.1, весом между 150 кг и 500 кг, выполненный с возможностью вмещения в пространство для вспомогательной нагрузки ракеты-носителя.
11. Сервисный спутник по п.1, в котором каждый из по меньшей мере двух стыковочных рычагов включает в себя четырехзвенный рычажный механизм.
12. Сервисный спутник по п.11, в котором четырехзвенный рычажный механизм включает в себя:
первое колено, поворотно соединенное с сервисным спутником;
второе колено, поворотно соединенное с сервисным спутником и отстоящее от первого колена; и
рабочий рычаг, поворотно соединенный в первом положении с первым коленом и поворотно соединенный во втором положении со вторым коленом.
13. Сервисный спутник по п.12, в котором рабочий рычаг поворотно соединен с первым коленом в первом положении на первой стороне рабочего рычага вблизи корпуса, причем рабочий рычаг шарнирно соединен со вторым коленом в положении между первым положением и концом для зацепления со шпангоутом.
14. Сервисный спутник по п.1, дополнительно включающий в себя по меньшей мере одну солнечную панель, прикрепленную к корпусу и выдвигаемую из корпуса в ориентации, которая наклонена под углом более около 30 градусов относительно оси север-юг корпуса.
15. Сервисный спутник по п.14, в котором по меньшей мере одна солнечная панель включает в себя первую солнечную панель, выполненную с возможностью поворота вокруг своей продольной оси, причем по меньшей мере один контроллер выполнен с возможностью поворота первой солнечной панели, чтобы исключить отбрасывание тени первой солнечной панелью на вторую солнечную панель, прикрепленную к орбитальному спутнику.
16. Сервисный спутник по п.1, в котором по меньшей мере один контроллер дополнительно выполнен с возможностью:
перемещения по меньшей мере двух стыковочных рычагов для расцепления конца для зацепления со шпангоутом каждого из по меньшей мере двух стыковочных рычагов от стыковочного шпангоута орбитального спутника;
запуска по меньшей мере двух двигателей для перемещения сервисного спутника от орбитального спутника и для расположения сервисного спутника в пределах расстояния стыковки от другого орбитального спутника; и
перемещения каждого из по меньшей мере двух стыковочных рычагов для обеспечения соединения конца для зацепления со шпангоутом каждого из по меньшей мере двух стыковочных рычагов со стыковочным шпангоутом другого орбитального спутника, таким образом образуя другое соединение между сервисным спутником и другим орбитальным спутником посредством продолжающегося наружу стыковочного шпангоута другого орбитального спутника и таким образом обеспечивая возможность сервисному спутнику соединиться с другим орбитальным спутником с образованием другого тандема; и
координирования запуска по меньшей мере двух двигателей для перемещения другого орбитального спутника посредством усилий, прикладываемых посредством продолжающегося наружу стыковочного шпангоута другого орбитального спутника.
17. Способ обеспечения орбитальных обслуживаний орбитального спутника, содержащий этапы, на которых:
маневрируют сервисным спутником, запущенным в космос, в пределах расстояния стыковки от орбитального спутника;
стыкуют сервисный спутник с орбитальным спутником посредством зацепления продолжающегося наружу стыковочного шпангоута на орбитальном спутнике для соединения сервисного спутника с продолжающимся стыковочным шпангоутом, образуя тем самым соединение между сервисным спутником и орбитальным спутником посредством стыковочного шпангоута с образованием тем самым тандема; и
координируют запуск по меньшей мере двух двигателей сервисного спутника для перемещения орбитального спутника посредством усилий, прикладываемых посредством продолжающегося наружу стыковочного шпангоута.
18. Способ по п.17, в котором этап стыковки включает в себя перемещение каждого из по меньшей мере двух стыковочных рычагов для обеспечения соединения конца для зацепления со шпангоутом каждого из по меньшей мере двух стыковочных рычагов со стыковочным шпангоутом по меньшей мере в двух расположенных на расстоянии друг от друга положениях на стыковочном шпангоуте, таким образом образуя соединение между сервисным спутником и орбитальным спутником посредством продолжающегося наружу стыковочного шпангоута и таким образом обеспечивая возможность сервисному спутнику соединиться с орбитальным спутником, образуя тандем.
19. Способ по п.18, дополнительно включающий в себя этап регулирования по меньшей мере двух стыковочных рычагов, так чтобы корпус сервисного спутника был наклонен относительно орбитального спутника.
20. Способ по п.19, дополнительно включающий в себя этап определения угла поворота между корпусом сервисного спутника и орбитальным спутником на основе величины тяги, требуемой для выполнения комбинированных орбитальных коррекций восток-запад и север-юг орбитального спутника.
21. Способ по п.18, дополнительно включающий в себя этап запуска одного из по меньшей мере двух двигателей для выполнения комбинированных орбитальных коррекций восток-запад и север-юг орбитального спутника, когда корпус сервисного спутника повернут вокруг стыковочного шпангоута.
22. Способ по п.18, дополнительно включающий в себя этап, на котором по меньшей мере одну солнечную панель сервисного спутника наклоняют относительно корпуса сервисного спутника.
23. Способ по п.18, дополнительно включающий в себя этап, на котором поворачивают первую солнечную панель, прикрепленную к сервисному спутнику, для исключения отбрасывания тени первой солнечной панелью на вторую солнечную панель, прикрепленную к орбитальному спутнику.
24. Способ по п.17, в котором дополнительно:
осуществляют расцепление от стыковочного шпангоута орбитального спутника;
перемещают сервисный спутник от орбитального спутника и позиционируют сервисный спутник в пределах расстояния стыковки от другого орбитального спутника; и
осуществляют зацепление со стыковочным шпангоутом другого орбитального спутника, таким образом образуя другое соединение между сервисным спутником и другим орбитальным спутником посредством продолжающегося наружу стыковочного шпангоута другого орбитального спутника и таким образом обеспечивая возможность сервисному спутнику соединиться с другим орбитальным спутником с образованием другого тандема; и
перемещают другой орбитальный спутник посредством усилий, прикладываемых посредством продолжающегося наружу стыковочного шпангоута другого орбитального спутника.
25. Способ по п.18, дополнительно включающий в себя этапы, на которых:
с использованием устройства формирования изображения получают по меньшей мере одно изображение конца для зацепления со шпангоутом каждого из по меньшей мере двух стыковочных рычагов;
определяют относительное положение конца для зацепления со шпангоутом каждого из по меньшей мере двух стыковочных рычагов относительно корпуса сервисного спутника на основе по меньшей мере одного изображения; и
координируют перемещение каждого из по меньшей мере двух стыковочных рычагов на основе определенного относительного положения.
| US 5299764 A, 05.04.1994 | |||
| US 4219171 A, 26.08.1980 | |||
| СПОСОБ ДОСТАВКИ НЕБЕСНОГО ТЕЛА К ПЛАНЕТЕ НАЗНАЧЕНИЯ И КОСМИЧЕСКОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1987 |
|
RU2026243C1 |
| WO 2014024199 А1, 13.02.2014 | |||
| US 4407469 A, 04.10.1983 | |||
| US 6945500 B2, 20.09.2005 | |||
| US 6523784 B2, 25.02.2003 | |||
| US 4718709 A, 12.01.1988. | |||

