УРОВЕНЬ ТЕХНИКИ
[001] Коммерческий и государственный секторы космической отрасли стоят перед лицом больших затрат на вывод и поддержание на орбите Земли спутников связи и других спутников. Срок службы спутника обычно определяется количеством имеющегося на борту спутника топлива. Даже когда бортовая электроника еще является функциональной, когда заканчивается топливо, спутник обычно становится бесполезным. Поскольку потребность в спутниковой связи с течением времени возрастает, также возрастает типичный размер спутников. Для запуска большого геостационарного спутника связи требуются существенные начальные капиталовложения. Начальные капиталовложения для поставщика спутниковых услуг включают в себя не только стоимость самого спутника, но и стоимость запуска летательного аппарата, необходимого для доставки спутника с Земли на орбиту выведения.
[002] Спутник обычно включает в себя свою собственную двигательную установку, которая позволяет спутнику самому переходить с орбиты выведения на конечную геостационарную орбиту и поддерживать свое орбитальное положение в течение периода времени вплоть до 15 лет. Технологии двигательных установок за многие годы достигли своего полного развития и позволяют спутнику использовать не только химические установки, но и электрические двигательные установки, которые имеют гораздо большую эффективность. Эта увеличенная эффективность позволяет экономить топливо, что в свою очередь позволяет выводить большие и/или более тяжелые спутники на орбиту.
[003] Спутник на геостационарной орбите Земли подвергается воздействию сил притяжения Земли и Солнца, которые стремятся сместить спутник с его требуемого геостационарного положения. Спутник полагается на свою двигательную установку, чтобы принять корректирующие меры для компенсации смещений, вызванных силами притяжения Земли и Солнца. Двигательные маневры, требуемые для поддержания геостационарного положения спутника, иногда называются поддержанием положения. Когда спутник исчерпывает весь бортовой запас топлива, он больше не может использовать свою двигательную установку для поддержания своего геостационарного положения и может потребовать замены.
[004] В некоторых случаях, летательный аппарат для запуска спутника может не полностью выполнить свои функции и может доставить спутник на неправильную орбиту. Спутник тогда должен затратить свое бортовое топливо для перевода себя с неправильной орбиты на свою правильную орбиту. Таким образом, некоторая часть топлива, предназначенная для поддержания положения, может использоваться для начальной коррекции орбиты, что в свою очередь может привести к более короткому сроку службы спутника, что приводит к уменьшению дохода поставщика спутниковых услуг. В других случаях, спутнику может потребоваться изменить свое орбитальное положение и/или ориентацию в различных коммерческих или эксплуатационных целях. Эти изменения могут также потребовать, чтобы спутник расходовал бортовое топливо, что приводит к более короткому сроку службы.
[005] Вследствие больших затрат, связанных с заменой спутника в космосе, существует потребность в технологии, которая может помочь продлить срок службы спутника, уже находящегося на орбите.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[006] В одном аспекте, настоящее раскрытие направлено на обслуживающий спутник для обеспечения услуг по поддержанию положения для основного спутника. Обслуживающий спутник может включать в себя тело и захватывающий механизм, прикрепленный к телу. Захватывающий механизм может быть выполнен с возможностью прикрепления к стыковочному кольцу, продолжающемуся от внешней поверхности основного спутника. Прикрепление захватывающего механизма к стыковочному кольцу может образовывать соединение между основным спутником и обслуживающим спутником через продолжающееся наружу стыковочное кольцо, что обеспечивает в результате соединенный блок, имеющий совместный центр масс. Обслуживающий спутник может включать в себя по меньшей мере два двигателя и по меньшей мере один контроллер. Такой контроллер может быть выполнен с возможностью поддержания соединенного блока по существу на стационарной орбите и может делать это посредством выборочного перемещения каждого из упомянутых по меньшей мере двух двигателей в угловые ориентации таким образом, чтобы во время включения двигателей, векторы тяги каждого из упомянутых по меньшей мере двух двигателей не проходили через совместный центр масс, и каждый из них был смещен от совместного центра масс.
[007] В другом аспекте, способ поддержания положения может включать в себя этап запуска обслуживающего спутника в космос и этап маневрирования им с точностью до стыковочного расстояния основного спутника. Способ может также включать в себя этап соединения обслуживающего спутника с основным спутником для образования соединенного блока посредством сцепления по меньшей мере двух рычагов обслуживающего спутника с внешним стыковочным кольцом основного спутника. Соединенный блок может иметь совместный центр масс. Способ может включать в себя этап выборочного перемещения каждого из по меньшей мере двух двигателей обслуживающего спутника для включения во время маневров для поддержания положения, таким образом, чтобы векторы тяги упомянутых по меньшей мере двух двигателей не проходили через совместный центр масс и были смещены от совместного центра масс.
[008] Дополнительные цели и преимущества вариантов осуществления настоящего раскрытия будут частично изложены в нижеследующем описании и частично будут понятны из описания, или могут быть изучены при применении на практике вариантов осуществления настоящего раскрытия. Следует понимать, что как приведенное выше общее описание, так и нижеследующее подробное описание только иллюстрируют, а не ограничивают раскрытые варианты осуществления и формулу изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[009] Сопутствующие чертежи, которые включены в это раскрытие и составляют его часть, показывают иллюстративные раскрытые варианты осуществления настоящего раскрытия и, вместе с описанием, служат для объяснения принципов настоящего раскрытия. В чертежах:
[010] Фиг. 1А показывает вид сверху иллюстративного обслуживающего спутника, соответствующего раскрытым вариантам осуществления.
[011] Фиг. 1В показывает вид сбоку иллюстративного обслуживающего спутника фиг. 1А, соответствующего раскрытым вариантам осуществления.
[012] Фиг. 2 показывает вид сверху иллюстративного механизма развертывания двигателей обслуживающего спутника, показанного на фиг. 2А, соответствующего раскрытым вариантам осуществления.
[013] Фиг. 3 показывает иллюстративный соединенный блок или тандемный модуль обслуживающего спутника фиг. 1А и 1В и основного спутника, соответствующий раскрытым вариантам осуществления.
[014] Фиг. 4А показывает тандемный модуль с иллюстративной ориентацией двигателей обслуживающего спутника фиг. 1А и 1В, соответствующий раскрытым вариантам осуществления.
[015] Фиг. 4В показывает тандемный модуль с другой иллюстративной ориентацией двигателей обслуживающего спутника фиг. 1А и 1В, соответствующий раскрытым вариантам осуществления.
[016] Фиг. 5А показывает вид с конца иллюстративной конфигурации соединенного блока фиг. 3 вдоль оси z координат, соответствующего раскрытым вариантам осуществления.
[017] Фиг. 5В показывает вид сбоку иллюстративной конфигурации соединенного блока фиг. 3 вдоль оси y координат, соответствующего раскрытым вариантам осуществления.
[018] Фиг. 5С показывает вид сверху иллюстративной конфигурации соединенного блока фиг. 3 вдоль оси x координат, соответствующего раскрытым вариантам осуществления.
[019] Фиг. 6А показывает тандемный модуль с иллюстративной ориентацией двигателей обслуживающего спутника фиг. 1А и 1В, соответствующий раскрытым вариантам осуществления.
[020] Фиг. 6В показывает тандемный модуль с другой иллюстративной ориентацией двигателей обслуживающего спутника фиг. 1А и 1В, соответствующий раскрытым вариантам осуществления.
[021] Фиг. 7А показывает тандемный модуль с еще одной иллюстративной ориентацией двигателей обслуживающего спутника фиг. 1А и 1В, соответствующий раскрытым вариантам осуществления.
[022] Фиг. 7В показывает тандемный модуль с дополнительной иллюстративной ориентацией двигателей обслуживающего спутника фиг. 1А и 1В, соответствующий раскрытым вариантам осуществления.
[023] Фиг. 8 показывает этапы иллюстративного способа, выполняемого с использованием обслуживающего спутника фиг. 1А и 1В, соответствующего раскрытым вариантам осуществления.
[024] Фиг. 9 показывает этапы иллюстративного способа, выполняемого обслуживающим спутником фиг. 1А и 1В, соответствующего раскрытым вариантам осуществления.
[025] Фиг. 10 показывает этапы иллюстративного способа, выполняемого обслуживающим спутником фиг. 1А и 1В, соответствующего раскрытым вариантам осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[026] Аспекты настоящего раскрытия относятся к обслуживающему спутнику для обеспечения услуг по поддержанию положения для основного спутника. Термин «спутник» относится, в общем, к космическому аппарату, который может быть запущен в космос и способен выходить на орбиту планетарного тела. В качестве примера, спутник может быть способен выходить на орбиту Земли. Термин «основной спутник» относится, в общем, к космическому аппарату, который уже находится в космосе на орбите планетарного тела. В некоторых иллюстративных вариантах осуществления, основной спутник может быть расположен на геостационарной орбите Земли. Термин «обслуживающий спутник» относится к спутнику или космическому аппарату, способному обеспечить услуги для основного спутника, в то время как основной спутник и обслуживающий спутник находятся на орбите планетарного тела. В качестве примера, такие орбитальные услуги, обеспечиваемые обслуживающим спутником для основного спутника, могут включать в себя подъем орбиты, поддержание положения, изменение положения, изменение наклонения, вывод с орбиты, перепозиционирование на орбите, дозаправку топливом или любой другой маневр или действие для ремонта, перемещения, или продления срока службы основного спутника.
[027] В то время как настоящее раскрытие обеспечивает иллюстративные конфигурации обслуживающего спутника, следует отметить, что аспекты настоящего раскрытия в своем самом широком смысле не ограничены раскрытыми конфигурациями. Напротив, предполагается, что вышеупомянутые принципы могут быть применены к другим конфигурациям обслуживающих спутников. Фиг. 1А показывает вид спереди иллюстративного варианта осуществления обслуживающего спутника 10 согласно настоящему раскрытию. Фиг. 1В показывает вид сбоку иллюстративного раскрытого обслуживающего спутника 10.
[028] Согласно настоящему раскрытию, обслуживающий спутник может обеспечить услуги по поддержанию положения для основного спутника. Как обсуждалось выше, основной спутник может подвергаться воздействию сил притяжения Земли и/или Солнца, которые могут вызывать смещение основного спутника с его выделенного положения на геостационарной орбите. Обслуживающий спутник может помочь компенсировать такие смещения посредством поддержания основного спутника в его выделенном положении на геостационарной орбите. Термин «поддержание положения» может, в общем, относиться к маневрам, связанным с обеспечением компенсирующих смещений, требуемых для поддержания основного спутника в его выделенном положении на геостационарной орбите.
[029] В некоторых иллюстративных вариантах осуществления, основной спутник может иметь стыковочное кольцо, продолжающееся от внешней поверхности основного спутника. Термин «стыковочное кольцо» относится, в общем, к конструкции, прикрепленной к внешней поверхности основного спутника. Стыковочное кольцо может быть использовано для прикрепления основного спутника к летательному аппарату-носителю или ракете-носителю для запуска основного спутника в космос. Альтернативно, стыковочное кольцо может также называться кольцом прикрепления полезной нагрузки, что указывает на то, что оно может быть использовано для прикрепления основного спутника в качестве полезной нагрузки к летательному аппарату-носителю. Стыковочное кольцо может быть прикреплено к наружной (или внешней) поверхности основного спутника. В некоторых иллюстративных вариантах осуществления, стыковочное кольцо может иметь, в общем, круглую форму. Однако предполагается, что стыковочное кольцо может иметь любую форму, например, эллиптическую, многоугольную, квадратную, прямоугольную, или любую другую форму, известную в данной области техники. В качестве примера, как показано на фиг. 3, основной спутник 200 может иметь стыковочное кольцо 202.
[030] Обслуживающий спутник согласно настоящему раскрытию может включать в себя тело. Термин «тело» может относиться, в общем, к оболочке или корпусу, которые заключают в себе один или несколько компонентов обслуживающего спутника. Например, тело может заключать в себе и окружать электронные схемы для управления различными компонентами обслуживающего спутника, схемы связи, топливные баки, которые могут содержать топливо, требуемое для приведения в движение обслуживающего спутника, реактивные колеса для сохранения остаточных моментов импульса обслуживающего спутника, множество датчиков, в том числе датчиков для определения ускорений и крутящих моментов на обслуживающем спутнике, и любые другие компоненты спутников, известные в данной области техники. В некоторых иллюстративных вариантах осуществления, тело обслуживающего спутника может образовывать по существу замкнутую оболочку. В других иллюстративных вариантах осуществления, одна или несколько боковых стенок тела могут иметь отверстия. Тело обслуживающего спутника может иметь любую форму. Например, тело обслуживающего спутника может быть кубическим, кубоидным, цилиндрическим, многоугольным, или может иметь любую другую форму, известную в данной области техники. Фиг. 1А и 1В, например, показывают, в общем, кубоидное тело 12 обслуживающего спутника 10.
[031] Обслуживающий спутник согласно настоящему раскрытию может также включать в себя захватывающий механизм, прикрепленный к телу. Захватывающий механизм может быть выполнен с возможностью прикрепления к стыковочному кольцу, продолжающемуся от внешней поверхности основного спутника. Термин «захватывающий механизм» относится, в общем, к одному или нескольким конструктивным элементам, связанным с обслуживающим спутником, которые способны быть механически прикрепленными или присоединенными к основному спутнику. Согласно настоящему раскрытию, захватывающий механизм может быть выполнен с использованием различных альтернативных конструкций. Например, захватывающий механизм может включать в себя один или несколько рычагов, прикрепленных к одному концу тела обслуживающего спутника. Свободный конец рычага может включать в себя зажимное устройство, выполненное с возможностью приема части основного спутника между противодействующими зажимными элементами. В одном иллюстративном варианте осуществления согласно настоящему раскрытию, стыковочное кольцо основного спутника может быть принято между противодействующими зажимными элементами зажимного устройства. Противодействующие зажимные элементы могут быть выполнены с возможностью прослаивать стыковочное кольцо между противодействующими зажимными элементами.
[032] В другом иллюстративном варианте осуществления захватывающего механизма, свободный конец рычага может включать в себя радиально продолжающиеся конструктивные элементы, которые могут сцепляться с внутренней поверхностью стыковочного кольца в одном или нескольких местоположениях. Направленная радиально наружу сила, оказываемая радиально продолжающимися элементами на стыковочное кольцо, может служить для прикрепления рычага к стыковочному кольцу. В то время как настоящее раскрытие описывает различные примеры захватывающего механизма, настоящее раскрытие в своем самом широком смысле не ограничено конкретной конфигурацией или конструкцией захватывающего механизма. Напротив, предполагается, что любая конструкция или конфигурация, способная образовывать надежное соединение с основным спутником, может считаться «захватывающим механизмом» в пределах смысла настоящего раскрытия. Фиг. 1А и 1В показывают иллюстративный вариант осуществления захватывающего механизма 14.
[033] Таким образом, захватывающий механизм, согласно настоящему раскрытию, может включать в себя по меньшей мере два рычага, которые, например, могут быть выполнены с возможностью сцепления со стыковочным кольцом. Термин «рычаг», который может быть также называться «стыковочным рычагом», может включать в себя один или несколько конструктивных элементов, продолжающихся наружу от тела обслуживающего спутника. Каждый рычаг может иметь одну или несколько точек сочленения или сочлененных колен. Предполагается, что в некоторых иллюстративных вариантах осуществления обслуживающий спутник может включать в себя более двух рычагов. Фиг. 1А показывает иллюстративный вариант осуществления обслуживающего спутника 10, который может включать в себя четыре стыковочных рычага 16. Как показано на фиг. 1В, каждый стыковочный рычаг 16 может включать в себя четырехстежневой рычажный механизм. Следует, однако, отметить, что, стыковочный рычаг согласно настоящему раскрытию не ограничен раскрытой четырехстежневой рычажной конфигурацией. Напротив, предполагается, что стыковочный рычаг 16 может включать в себя двухстержневой, трехстержневой, или шестистержневой рычажный механизм. В некоторых иллюстративных вариантах осуществления согласно настоящему раскрытию, стыковочный рычаг 16 может включать в себя любое число соединений. Также предполагается, что в некоторых вариантах осуществления не будут использоваться никакие соединения.
[034] В иллюстративном варианте осуществления обслуживающего спутника 10, показанном на фиг. 1В, стыковочный рычаг 16 может включать в себя стационарное колено 18, прикрепленное к телу 12 обслуживающего спутника 10. Как также показано на фиг. 1В, стыковочный рычаг 16 может включать в себя два колена 20, 22, расположенные на расстоянии друг от друга, и поворотно соединенные со стационарным коленом 18 в шарнирах 24 и 26, соответственно. Поворотом каждого из колен 20 и 22 относительно шарниров 24 и 26, соответственно, можно независимо управлять для перемещения стыковочного рычага 16. Также предполагается, что в некоторых иллюстративных вариантах осуществления часть тела 12 обслуживающего спутника 10 может заменить стационарное колено 18 четырехстежневого рычажного механизма. Таким образом, например, колена 20, 22 могут быть расположены на расстоянии друг от друга, и могут быть поворотно соединены с телом 12 обслуживающего спутника 10 через шарниры 24, 26, соответственно.
[035] В иллюстративном варианте осуществления стыковочного рычага 16, показанном на фиг. 1В, рабочий рычаг 28 может быть поворотно соединен на одном конце 30 с одним из двух колен (например, коленом 20), в то время как другое из двух колен (например, колено 22) может быть соединено с рабочим рычагом 28 между присоединенным концом 30 и свободным концом 32. Свободный конец 32 рабочего рычага 28 может включать в себя сцепляющуюся с кольцом часть 34, выполненную с возможностью сцепления со стыковочным кольцом основного спутника. Сцепляющаяся с кольцом часть 34 может включать в себя один или несколько зажимных механизмов, описанных выше. Хотя настоящее раскрытие описывает обслуживающий спутник 10, имеющий четыре стыковочных рычага 16, предполагается, что обслуживающий спутник 10 может включать в себя любое число стыковочных рычагов 16.
[036] Дополнительно, хотя настоящее раскрытие описывает прикрепление стыковочного рычага к стыковочному кольцу основного спутника, настоящее раскрытие в своем самом широком смысле не ограничено конкретным способом прикрепления. Предполагается, что свободный конец захватывающего механизма может быть выполнен с возможностью быть прикрепленным к внешнему конструктивному элементу основного спутника, отличному от стыковочного кольца. Например, свободный конец захватывающего механизма может быть выполнен с возможностью быть прикрепленным к выступу или другому конструктивному элементу, расположенному на внешней поверхности основного спутника.
[037] Согласно настоящему раскрытию, посредством прикрепления к стыковочному кольцу, захватывающий механизм может образовывать соединение между основным спутником и обслуживающим спутником через продолжающееся наружу стыковочное кольцо. Термин «соединение» относится, в общем, к прикреплению, присоединению, или связи между двумя объектами. Соединение между обслуживающим спутником и основным спутником согласно настоящему раскрытию может быть достаточно жестким, чтобы быть способным передавать движущие силы от обслуживающего спутника к основному спутнику, или наоборот. Фиг. 3, например, показывает соединение 204 между обслуживающим спутником 10 и основным спутником 200.
[038] Согласно настоящему раскрытию, прикрепление захватывающего механизма обслуживающего спутника к основному спутнику может обеспечить в результате соединенный блок, имеющий совместный центр масс. Термин «соединенный блок» относится, в общем, к модулю, образованному посредством прикрепления, присоединения, или образования связи двух объектов. Например, прикрепление захватывающего механизма обслуживающего спутника к основному спутнику может образовывать соединенный блок или модуль, который включает в себя обслуживающий спутник и основной спутник. В некоторых иллюстративных вариантах осуществления, соединенный блок, образованный посредством соединения обслуживающего спутника и основного спутника, может также называться «тандемным модулем». Фиг. 3, например, показывает соединенный блок 206, образованный посредством прикрепления захватывающего механизма 14 обслуживающего спутника 10 к стыковочному кольцу 202 основного спутника 200. Следует отметить, что соединенный блок 206 может быть образован посредством прикрепления некоторых или всех стыковочных рычагов 16 обслуживающего спутника 10 к основному спутнику 200. Иллюстративные варианты осуществления захватывающего механизма, соответствующего настоящему раскрытию, раскрыты в международной заявке на патент № PCT/IL2015/050856, поданной 26 августа 2015, и предварительной заявке на патент США № 62/041,780, поданной 26 августа 2014, которые обе полностью включены в данный документ по ссылке.
[039] Термин «совместный центр масс» относится, в общем, к центру масс двух объектов, соединенных друг с другом. Совместный центр масс соединенного блока, образованного обслуживающим спутником и основным спутником, может зависеть, например, от массы обслуживающего спутника и массы основного спутника. Совместный центр масс может также зависеть, например, от того, как масса обслуживающего спутника и масса основного спутника распределены в пространстве. Следует отметить, что соединенный блок, включающий в себя обслуживающий спутник и основной спутник, будет обязательно иметь совместный центр масс.
[040] Обслуживающий спутник, согласно настоящему раскрытию, может включать в себя по меньшей мере два двигателя. При использовании здесь, двигатель, в общем, относится к устройству, которое может обеспечить движущую силу для перемещения объекта, к которому двигатель может быть прикреплен. В некоторых иллюстративных вариантах осуществления, двигатель может вынуждать топливо вытекать из двигателя, в общем, в заданном направлении, что обеспечивает генерирование движущей силы в направлении, противоположном заданному направлению. Топливо, используемое двигателем, может быть в жидкой или газообразной форме. Двигатель, согласно различным вариантам осуществления настоящего раскрытия, может быть химическим двигателем, резисторным реактивным двигателем, двигателем на холодном газе, электрическим тяговым двигателем, двигателем на двухкомпонентном топливе, двигателем на эффекте Холла, ионным двигателем с сетками, электродуговым двигателем, плазменным тяговым двигателем, или двигателем любого другого типа, известным в данной области техники, или который может быть использован для перемещения объекта в космосе.
[041] Согласно вариантам осуществления настоящего раскрытия, упомянутые по меньшей мере два двигателя могут включать в себя первую пару двигателей и вторую пару двигателей. При использовании здесь, термин «пара» означает два двигателя. Следует, однако, отметить, что фраза «пара двигателей» в настоящем раскрытии не ограничена двумя двигателями, которые могут быть связаны друг с другом механически, электрически, или любым другим способом. Например, первая пара двигателей и вторая пара двигателей могут в совокупности включать в себя четыре отдельных и независимо управляемых двигателя. В то время как настоящее раскрытие описывает некоторые конфигурации и положения двигателей, настоящее раскрытие в своем самом широком смысле не ограничено конкретными конфигурациями и положениями двигателей. Таким образом, например, предполагается, что в некоторых иллюстративных вариантах осуществления обслуживающий спутник может иметь нечетное число двигателей. Дополнительно предполагается, что в других вариантах осуществления обслуживающий спутник настоящего раскрытия может иметь более двух пар двигателей.
[042] Согласно вариантам осуществления настоящего раскрытия, упомянутые по меньшей мере два двигателя могут включать в себя первый северный двигатель и второй северный двигатель. Первый северный двигатель и второй северный двигатель могут быть расположены на первой стороне обслуживающего спутника. Первый северный двигатель может быть расположен на расстоянии от второго северного двигателя. Согласно некоторым вариантам осуществления настоящего раскрытия, упомянутые по меньшей мере два двигателя могут также включать в себя первый южный двигатель и второй южный двигатель. Первый южный двигатель и второй южный двигатель могут быть расположены противоположно первой стороне обслуживающего спутника. Первый южный двигатель может быть расположен на расстоянии от второго южного двигателя. Термины «северный» и «южный» в своем самом широком смысле не ограничены конкретным положением относительно обслуживающего спутника. Напротив, в своем самом широком смысле термины «северный» и «южный» означают противоположные стороны обслуживающего спутника. Противоположные стороны могут быть расположены на любой из двух сторон координатной плоскости, проходящей через тело обслуживающего спутника.
[043] Фиг. 1А показывает иллюстративный вариант осуществления обслуживающего спутника 10, имеющего двигатели 36, 38, 40, и 42. Как показано на фиг. 1А, двигатели 36 и 38 могут быть расположены на первой стороне 44 тела 12 обслуживающего спутника 10. Например, двигатели 36 и 38 могут быть расположены на первой стороне 44 плоскости 46, проходящей через тело 12. Двигатели 36 и 38 могут быть расположены на расстоянии друг от друга. В некоторых иллюстративных вариантах осуществления, плоскость 46 может определять, в общем, продольную плоскость симметрии обслуживающего спутника 10. В других иллюстративных вариантах осуществления, плоскость 46 может определять плоскость зенит-надир обслуживающего спутника относительно Земли. Как также показано в иллюстративном варианте осуществления фиг. 1А, двигатели 40 и 42 могут быть расположены на второй стороне 48 тела 12 обслуживающего спутника 10. Например, двигатели 40 и 42 могут быть расположены на второй стороне 48 плоскости 46. Вторая сторона 48 тела 12 может быть противоположна первой стороне 44.
[044] В иллюстративном варианте осуществления, показанном на фиг. 1А, первая сторона 44 может быть идентифицирована как северная сторона обслуживающего спутника 10, а вторая сторона 48 может быть идентифицирована как южная сторона обслуживающего спутника 10. Двигатели 36 и 38 могут быть обозначены как первый северный двигатель 36 и второй северный двигатель 38. Подобным образом, двигатели 40 и 42 могут быть обозначены как первый южный двигатель 40 и второй южный двигатель 42. Следует отметить, что в некоторых вариантах осуществления сторона 44 может быть обозначена как южная сторона, а сторона 48 может быть обозначена как северная сторона обслуживающего спутника 10. В этих иллюстративных вариантах осуществления, двигатели 36 и 38 могут быть обозначены как первый южный двигатель 36 и второй южный двигатель 38, а двигатели 40 и 42 могут быть обозначены как первый северный двигатель 40 и второй северный двигатель 42.
[045] Согласно некоторым аспектам настоящего раскрытия, первая пара двигателей может включать в себя первый северный двигатель и первый южный двигатель. Подобным образом, вторая пара двигателей может включать в себя второй северный двигатель и второй южный двигатель. Фиг. 1А, например, показывает первую пару 54 двигателей, включающую в себя двигатель 36 и двигатель 40, и вторую пару 56 двигателей, включающую в себя двигатель 38 и двигатель 42. В одном иллюстративном варианте осуществления, когда первая сторона 44 обозначена как северная сторона, и вторая сторона 48 обозначена как южная сторона обслуживающего спутника 10, первая пара 54 двигателей может включать в себя первый северный двигатель 36 и первый южный двигатель 40. Подобным образом, вторая пара 56 двигателей может включать в себя второй северный двигатель 38 и второй южный двигатель 42.
[046] В некотором иллюстративном варианте осуществления, показанном на фиг. 1А, третья сторона 58 может быть идентифицирована как восточная сторона обслуживающего спутника 10, и четвертая сторона 60 может быть идентифицирована как западная сторона обслуживающего спутника 10. Третья сторона 58 и четвертая сторона 60 могут быть расположены на противоположных сторонах плоскости 62, проходящей через тело 12 обслуживающего спутника 10. Плоскость 62 может быть расположена, в общем, перпендикулярно плоскости 46. В некоторых аспектах настоящего раскрытия, плоскость 62 может быть плоскостью симметрии обслуживающего спутника 10. Двигатели 36 и 40 могут быть обозначены как первый восточный двигатель 36 и второй восточный двигатель 40, которые могут быть расположены на расстоянии друг от друга, и могут быть расположены на третьей стороне 58 обслуживающего спутника 10. Подобным образом, двигатели 38 и 42 могут быть обозначены как первый западный двигатель 38 и второй западный двигатель 42, которые могут быть расположены на расстоянии друг от друга и могут быть расположены на четвертой стороне 60 обслуживающего спутника 10, противоположной третьей стороне 58. Следует, однако, отметить, что в некоторых вариантах осуществления сторона 58 может быть обозначена как западная сторона, а сторона 60 может быть обозначена как восточная сторона обслуживающего спутника 10. В этих иллюстративных вариантах осуществления, двигатели 36 и 40 могут быть обозначены как первый западный двигатель 36 и второй западный двигатель 40, а двигатели 38 и 42 могут быть обозначены как первый восточный двигатель 38 и второй восточный двигатель 42.
[047] Согласно настоящему раскрытию, обслуживающий спутник может включать в себя механизм развертывания двигателей. Термин «механизм развертывания двигателей» относится, в общем, к одному или нескольким конструктивным элементам, прикрепленным к обслуживающему спутнику и способным продолжаться наружу и от тела обслуживающего спутника. Механизм развертывания двигателей может включать в себя различные альтернативные конструкции, при условии, что эти конструкции способны развертывать двигатель. В некоторых иллюстративных вариантах осуществления согласно настоящему раскрытию, каждый двигатель может иметь специальный механизм развертывания двигателей. Например, каждый двигатель может быть прикреплен к удлинителю или стреле, которые могут иметь первый конец, прикрепленный к телу обслуживающего спутника, и свободный конец, дистальный относительно первого конца. Двигатель может быть прикреплен к свободному концу удлинителя или стрелы. В других иллюстративных вариантах осуществления согласно настоящему раскрытию, более одного двигателя может быть прикреплено к одному и тому же удлинителю или стреле. В других иллюстративных вариантах осуществления, механизм развертывания двигателей может включать в себя один или несколько рычажных механизмов, способных позиционировать двигатели на заданном расстоянии от тела обслуживающего спутника. Например, механизм развертывания двигателей может включать в себя двух-, четырех-, или шести-стержневые рычажные механизмы, подобные рычажным механизмам захватывающего механизма, описанного выше.
[048] Фиг. 1А, например, показывает механизм 64 развертывания двигателей обслуживающего спутника 10. Механизм 64 развертывания двигателей может включать в себя вилки 66 развертывания двигателей (см. фиг. 1А). Как показано на фиг. 2, вилка 66 развертывания двигателей может включать в себя основание 70 вилки и рычаги 72, 74 вилки. Основание 70 вилки может быть поворотно соединено с телом 12 обслуживающего спутника 10 у конца 76 основания вилки. Рычаги 72, 74 вилки могут продолжаться от основания 70 вилки к концам 78, 80 рычагов вилки, соответственно. Концы 78, 80 рычагов вилки могут быть расположены на расстоянии друг от друга. В одном иллюстративном варианте осуществления, показанном на фиг. 2А и 2В, основание 70 вилки и рычаги 72, 74 вилки могут образовывать конструктивный элемент, имеющий, в общем, форму ʺYʺ. Хотя это и не показано на фиг. 2, вилка 68 развертывания двигателей (см. фиг. 1А) может иметь конструкцию, подобную конструкции, описанной выше в отношении вилки 66 развертывания двигателей. Основание 70 вилки и рычаги 72, 74 вилки могут определять плоскости 86, 88 вилок (см. фиг. 1В). Хотя фиг. 2А и 2В показывают, что каждая из вилок 66, 68 развертывания двигателей имеет только два рычага 72, 74 вилки, предполагается, что вилки 66, 68 развертывания двигателей могут иметь любое число рычагов вилок. Дополнительно, хотя фиг. 1А и 1В показывают, что обслуживающий спутник 10 имеет только две вилки 66, 68 развертывания двигателей, предполагается, что обслуживающий спутник 10 может иметь любое число вилок развертывания двигателей.
[049] Возвращаясь к фиг. 1В, вилки 66, 68 развертывания двигателей могут быть ориентированы в заданной ориентации посредством поворота вилок 66, 68 развертывания двигателей относительно плоскости 46 (см. фиг. 1А). В одном иллюстративном варианте осуществления, показанном на фиг. 1В, ориентация вилок 66, 68 развертывания двигателей может быть определена углом ϕ между плоскостями 86, 88 вилок, соответственно, и плоскостями, параллельными плоскости 46 обслуживающего спутника 10. Предполагается, что вилки 66, 68 развертывания двигателей могут быть ориентированы под одними и теми же или разными углами ϕ относительно плоскости 46.
[050] Согласно настоящему раскрытию, механизм развертывания двигателей обслуживающего спутника может также включать в себя одно или несколько устройств позиционирования двигателей. При использовании здесь, устройство позиционирования двигателей может включать в себя конструктивный элемент, соединенный с вилкой развертывания двигателей, способный изменять ориентацию двигателя. Это может происходить посредством механизмов, которые поворачивают, наклоняют, вращают или иным образом перенаправляют двигатель. Двигатель может быть прикреплен к такому конструктивному элементу. В то время как настоящее раскрытие описывает конфигурацию, имеющую устройство позиционирования двигателей, прикрепленное к вилке развертывания двигателей, настоящее раскрытие в своем самом широком смысле не ограничено раскрытой конфигурацией. Например, предполагается, что устройство позиционирования двигателей может быть прямо прикреплено к телу обслуживающего спутника. Также предполагается, что более одного двигателя может быть прикреплено к каждому устройству позиционирования двигателей. Дополнительно предполагается, что обслуживающий спутник может иметь любое число устройств позиционирования двигателей.
[051] Фиг. 1А показывает иллюстративные устройства позиционирования двигателей, реализованные в этом конкретном примере в виде рычагов 90, 92, 94, 96 двигателей. Как показано на фиг. 1А, например, рычаг 90 двигателя может включать в себя первый конец 98 и второй конец 100. Первый конец 98 рычага 90 двигателя может быть поворотно прикреплен к концу 78 рычага вилки 66 развертывания двигателей. Двигатель 36 может быть неподвижно прикреплен ко второму концу 100 рычага 90 двигателя. Как также показано на фиг. 1А, например, рычаг 92 двигателя может включать в себя первый конец 102 и второй конец 104. Первый конец 102 рычага 92 двигателя может быть поворотно прикреплен к концу 80 рычага вилки первой вилки 66 развертывания двигателей. Двигатель 38 может быть неподвижно прикреплен ко второму концу 104 рычага 92 двигателя.
[052] Как дополнительно показано на фиг. 1А, например, рычаг 94 двигателя может включать в себя первый конец 106 и второй конец 108. Первый конец 106 рычага 94 двигателя может быть поворотно прикреплен к концу 82 рычага вилки 68 развертывания двигателей. Двигатель 40 может быть неподвижно прикреплен ко второму концу 108 рычага 94 двигателя. Дополнительно, как показано на фиг. 1А, например, рычаг 96 двигателя может включать в себя первый конец 110 и второй конец 112. Первый конец 110 рычага 96 двигателя может быть поворотно прикреплен к концу 84 рычага вилки 68 развертывания двигателей. Двигатель 42 может быть неподвижно прикреплен ко второму концу 112 рычага 96 двигателя.
[053] Согласно некоторым вариантам осуществления настоящего раскрытия, ориентация двигателя, прикрепленного к рычагу двигателя, может быть определена угловым смещением Θ между рычагом двигателя и плоскостью вилки развертывания двигателей, к которой рычаг двигателя может быть прикреплен. Таким образом, например, как показано на фиг. 1В, ориентация двигателя 36 может быть определена угловым смещением Θ1 между рычагом 90 двигателя и вилкой 66 развертывания двигателей. Угловое смещение Θ1 рычага 90 двигателя может определять первое положение Р1. Любой из двигателей 36, 38, 40, и 42 может быть ориентирован в положение Р1 посредством установления углового смещения Θ1 между соответствующим рычагом двигателя и вилкой двигателя. Также предполагается, что двигатели 36, 38, 40, 42 могут быть ориентированы с одними и теми же или разными величинами углового смещения Θ. В то время как настоящее раскрытие описывает конфигурацию, в которой ориентация двигателя определяется угловым смещением Θ между рычагом двигателя и его соответствующей вилкой развертывания двигателей, настоящее раскрытие в своем самом широком смысле не ограничено раскрытой конфигурацией. Например, предполагается, что ориентация двигателей 36, 38, 38, 40 может быть определена угловыми смещениями рычагов 90, 92, 94, 96 двигателей, соответственно, относительно плоскости 46. В других иллюстративных вариантах осуществления, ориентация двигателей 36, 38, 38, 40 может быть определена угловыми смещениями рычагов 90, 92, 94, 96 двигателей, соответственно, относительно плоскости 58. В других иллюстративных вариантах осуществления, ориентация двигателей 36, 38, 38, 40 может быть определена угловыми смещениями рычагов 90, 92, 94, 96 двигателей относительно любой другой поверхности тела 12 обслуживающего спутника 10.
[054] Согласно настоящему раскрытию, обслуживающий спутник может включать в себя по меньшей мере один контроллер. При использовании здесь, термин «контроллер» относится к электрическим или другим элементам, способным управлять различными операциями обслуживающего спутника. Например, по меньшей мере один контроллер может включать в себя устройство, которое имеет соответствующие логические или вычислительные компоненты, сконфигурированные согласно требованиям конкретного применения. В некоторых вариантах осуществления, контроллер может включать в себя любое физическое устройство, имеющее электрическую схему, которая выполняет логическую операцию с входным сигналом или входными сигналами. Например, упомянутый по меньшей мере один контроллер может включать в себя процессор, который имеет одну или несколько интегральных схем, микросхемы, микроконтроллеры, микропроцессоры, весь или часть центрального процессора (central processing unit - CPU), графический процессор (graphics processing unit - GPU), цифровой сигнальный процессор (digital signal processor - DSP), матрицу программируемых логических вентилей (field-programmable gate array - FPGA), или другие схемы, пригодные для выполнения команд или выполнения логических операций. Команды, выполняемые контроллером, могут быть, например, предварительно загружены в запоминающее устройство, объединенное с контроллером или встроенное в него, или могут быть запомнены в отдельном запоминающем устройстве, таком как память с произвольным доступом (Random Access Memory - RAM), постоянное запоминающее устройство (Read-Only Memory - ROM), жесткий диск, оптический диск, магнитный носитель данных, флэш-память, другая постоянная, неизменяемая, или энергонезависимая память, или любой другой механизм, способный запоминать команды для контроллера. Упомянутые один или несколько контроллеров могут включать в себя одноядерные или многоядерные процессоры на основе архитектур RISC, CISC, или любой другой архитектуры компьютерных команд.
[055] В случае использования более одного контроллера или процессора, все они могут иметь подобную конструкцию, или они могут иметь разные конструкции, электрически соединенные или несоединенные друг с другом. Они могут быть отдельными схемами или могут быть объединены в единственную схему. При использования более одного контроллера или процессора, они могут работать независимо или совместно. Они могут быть связаны электрическими, магнитными, оптическими, акустическими, механическими, или другими средствами, позволяющими им взаимодействовать. В некоторых вариантах осуществления, упомянутый по меньшей мере один процессор может быть связан с памятью.
[056] Запоминающие устройства, связанные с контроллером или процессором, могут включать в себя, например, устройства флэш-памяти типа «не-ИЛИ» или «не-И», постоянные запоминающие устройства (Read Only Memory - ROM), устройства памяти с произвольным доступом (Random Access Memory - RAM), и т.д. Запоминающие устройства, связанные с контроллером, могут включать в себя, например, накопители на жестких дисках, твердотельные накопители, и т.д.
[057] Упомянутый по меньшей мере один контроллер, при размещении на орбите, может быть также выполнен с возможностью установления связи с одним или несколькими контроллерами, расположенными на наземной станции управления на Земле, через один или несколько телекоммуникационных интерфейсов и другие телекоммуникационные схемы. Фиг. 1А и 1В, например, показывают иллюстративный контроллер 120.
[058] В некоторых аспектах настоящего раскрытия, контроллер может быть расположен на борту обслуживающего спутника. В других аспектах, контроллер может быть расположен на наземной станции управления на Земле. В других аспектах настоящего раскрытия, контроллер может быть расположен на борту космического аппарата, отличного от обслуживающего спутника. Когда контроллер расположен не на борту обслуживающего спутника, контроллер может быть способным управлять различными операциями обслуживающего спутника на основе сигналов, передаваемых от контроллера обслуживающего спутника через один или несколько телекоммуникационных интерфейсов или другие телекоммуникационные схемы.
[059] Согласно настоящему раскрытию, упомянутый по меньшей мере один контроллер может быть выполнен с возможностью поддержания соединенного блока на по существу стационарной орбите. При использовании здесь, термин «стационарная орбита» относится к геостационарной орбите Земли. Основной спутник, находящийся на геостационарной орбите, может иметь выделенную область. Выделенная область может быть определена первым заданным расстоянием в направлении восток-запад (т.е. вдоль геостационарной орбиты), и вторым заданным расстоянием в направлении север-юг (т.е. перпендикулярно геостационарной орбите). Вследствие воздействия сил притяжения Земли и Солнца на соединенный блок, соединенный блок может перемещаться относительно своего положения на геостационарной орбите. Двигатели обслуживающего спутника, основного спутника, или их обоих могут быть активированы для противодействия силам притяжения Земли и Солнца, вызывающим перемещение соединенного блока, для перемещения основного спутника в пределы выделенной области. Таким образом, при использовании здесь, фраза «по существу стационарная орбита» может заключать в себе перемещения соединенного блока в выделенной области и около нее на геостационарной орбите.
[060] Упомянутый по меньшей мере один контроллер может поддерживать соединенный блок на по существу геостационарной орбите посредством выборочного перемещения каждого из упомянутых по меньшей мере двух двигателей в угловые ориентации таким образом, чтобы во время включения двигателей, векторы тяги каждого из упомянутых по меньшей мере двух двигателей не проходили через центр масс. В некоторых иллюстративных вариантах осуществления, контроллер может обеспечить включение двигателей, например, посредством выталкивания топлива из двигателей. Как обсуждалось выше, выталкиваемое из двигателя топливо может генерировать реактивную силу на двигателе в направлении, противоположном направлению, в котором выталкивается топливо. При использовании здесь, термин «вектор тяги» относится, в общем, к комбинации величины реактивной силы и направления реактивной силы, приложенной к двигателю. Следует отметить, что реактивная сила, приложенная к двигателю, будет также приложена к обслуживающему спутнику и к соединенному блоку, когда обслуживающий спутник соединен с основным спутником. Реактивные силы, генерируемые двигателями, могут вызвать перемещение соединенного блока в направлении, соответствующем направлению вектора суммы векторов тяги, генерируемых выбранными двигателями.
[061] Обслуживающий спутник может быть соединен с любым из множества основных спутников, с образованием множества соединенных блоков. Каждый такой соединенный блок, образованный при соединении обслуживающего спутника с основным спутником, может иметь совместный центр масс.
[062] Предполагается, что согласно настоящему раскрытию контроллер может быть выполнен с возможностью ориентирования по меньшей мере двух двигателей таким образом, чтобы векторы тяги упомянутых по меньшей мере двух двигателей не проходили через любые из совместных центров масс, соответствующих множеству соединенных блоков, образованных при соединении обслуживающего спутника с множеством основных спутников. Действительно, согласно различным вариантам осуществления настоящего раскрытия, векторы тяги каждого из упомянутых по меньшей мере двух двигателей могут быть смещены от совместного центра масс. При использовании здесь, термин «смещение» относится, в общем, к пространственному разделению. Таким образом, например, упомянутый по меньшей мере один контроллер может ориентировать выбранные двигатели таким образом, чтобы векторы тяги выбранных двигателей могли быть пространственно отделены от совместных центров масс, соответствующих множеству соединенных блоков, описанных выше. В то время как настоящее раскрытие описывает конфигурацию, в которой выбирают по меньшей мере два двигателя, настоящее изобретение в своем самом широком смысле не ограничено конкретной конфигурацией. Например, предполагается, что упомянутый по меньшей мере один контроллер может выбрать один, два, или любое число двигателей для описанного выше маневра. Упомянутый по меньшей мере один контроллер может быть выполнен с возможностью ориентирования одного или нескольких выбранных двигателей таким образом, чтобы векторы тяги, генерируемые выбранными двигателями, не проходили через совместные центры масс, соответствующие множеству соединенных блоков, описанных выше.
[063] Фиг. 4A и 4B показывают пример двигателя, включаемого таким образом, что векторы тяги не проходят через совместный центр масс соединенного блока. Например, как показано на фиг. 4А, упомянутый по меньшей мере один контроллер 120 может ориентировать рычаг 90 двигателя с угловым смещением Θ2 относительно первой вилки 66 развертывания двигателей. В некоторых вариантах осуществления, угловое смещение Θ2 может определять положение Р2. Как также показано на фиг. 4А, контроллер 120 может ориентировать рычаг 92 двигателя с угловым смещением Θ3 относительно первой вилки 66 развертывания двигателей. В некоторых вариантах осуществления, угловое смещение Θ3 может определять положение Р3. Контроллер 120 может включать двигатели 36, 38. Включенный двигатель 36 может генерировать вектор 122 тяги, а включенный двигатель 38 может генерировать вектор 124 тяги. Как показано в иллюстративном варианте осуществления фиг. 4А, векторы 122 и 124 тяги могут не проходить через совместный центр 126 масс. Предполагается, что вследствие фиксированной ориентации векторов тяги на фиг. 4А, обслуживающий спутник 10 может стыковаться с множеством разных основных спутников, каждый из которых имеет отличный центр масс, и совместные центры масс в каждом случае могут, тем не менее, находиться между векторами 122, 124 тяги.
[064] Фиг. 4В показывает другой иллюстративный вариант осуществления, в котором рычаг 90 двигателя ориентирован с угловым смещением Θ3 (положение Р3), а рычаг 92 двигателя ориентирован с угловым смещением Θ2 (положение Р2). Контроллер 120 может включать двигатели 36, 38. Включенный двигатель 36 может генерировать вектор 132 тяги, а включенный двигатель 38 может генерировать вектор 134 тяги. Как показано на фиг. 4В, векторы 132 и 134 тяги не проходят через совместный центр 126 масс. Предполагается, что вследствие фиксированной ориентации векторов тяги на фиг. 4А, обслуживающий спутник 10 может стыковаться с множеством разных основных спутников, каждый из которых имеет отличный центр масс, и совместные центры масс в каждом случае могут, тем не менее, находиться между векторами 132, 134 тяги.
[065] Варианты осуществления настоящего раскрытия могут дополнительно включать в себя по меньшей мере один контроллер, выполненный с возможностью выборочного перемещения каждого из упомянутых по меньшей мере двух двигателей таким образом, чтобы совместный центр масс был расположен между точками пересечения векторов тяги и плоскости, проходящей через совместный центр масс соединенного блока. Термин «точка пересечения» относится к местоположению, где вектор тяги пересекается с плоскостью. В некоторых иллюстративных вариантах осуществления согласно настоящему раскрытию, эта плоскость может быть продольной плоскостью, проходящей через соединенный блок, включающий в себя основной спутник и обслуживающий спутник. Векторы тяги, генерируемые при включении двигателей обслуживающего спутника, могут пересекаться с продольной плоскостью во множестве положений. Упомянутый по меньшей мере один контроллер, согласно вариантам осуществления настоящего раскрытия, может ориентировать двигатели обслуживающего спутника таким образом, чтобы совместный центр масс обслуживающего спутника и основного спутника мог лежать между точками пересечения векторов тяги с продольной плоскостью.
[066] Фиг. 4А, например, показывает конфигурацию, в которой рычаги 90, 92 двигателя могут быть ориентированы с угловыми смещениями Θ2, Θ3, соответственно, таким образом, чтобы векторы 122 и 124 тяги могли пересекаться с плоскостью 62 в положениях 128 и 130, соответственно. Как также показано в иллюстративном варианте осуществления фиг. 4А, положения 128 и 130 могут быть смещены или пространственно отделены от совместного центра 126 масс. Как дополнительно показано на фиг. 4А, совместный центр 126 масс может лежать между положениями 128 и 130 пересечений. Подобным образом, как показано в иллюстративном варианте осуществления фиг. 4В, рычаги 90, 92 двигателя могут быть ориентированы с угловыми смещениями Θ3, Θ2, соответственно, таким образом, чтобы векторы 132 и 134 тяги могли пересекаться с плоскостью 62, проходящей через обслуживающий спутник 10 и основной спутник 200, в местоположениях 136 и 138, которые смещены (т.е. пространственно отделены) от совместного центра 126 масс. Как показано на фиг. 4В, совместный центр 126 масс может лежать между положениями 136 и 138 пересечений.
[067] Возвращаясь к фиг. 1А и 1В, в некоторых иллюстративных вариантах осуществления, обслуживающий спутник 10 может включать в себя одну или несколько панелей 140 солнечных батарей, которые могут быть прикреплены к телу 12 обслуживающего спутника 10. Панели 140 солнечных батарей могут быть продолжающимися наружу от тела 12 обслуживающего спутника 10. Панели 140 солнечных батарей могут быть выполнены с возможностью быть расположенными, в общем, перпендикулярно поверхности 142 тела 12 (см. фиг. 1В). Предполагается, однако, что панели 140 солнечных батарей могут быть наклонены относительно поверхности 142 тела 12. Панели 140 солнечных батарей могут генерировать электрическую энергию, которая может быть использована для выполнения различных операций, связанных с обслуживающим спутником 10. Например, энергия, генерируемая панелями 140 солнечных батарей, может быть использована для включения захватывающего механизма 14, механизма 64 развертывания двигателей (см. фиг. 2А, 2В), двигателей 36, 38, 40, 42, контроллера 120 и соответствующих электрических схем, и т.д., при подаче ее на контроллер 120 и другие электрические и телекоммуникационные схемы.
[068] Согласно вариантам осуществления настоящего раскрытия, упомянутый по меньшей мере один контроллер может быть дополнительно выполнен с возможностью настройки уровня тяги каждого из упомянутых по меньшей мере двух двигателей таким образом, чтобы крутящие моменты, генерируемые векторами тяги относительно по меньшей мере одной оси координат соединенного блока, были по существу уравновешенными. При использовании здесь, термин «уровень тяги» относится к величине реактивной силы, генерируемой двигателем. В некоторых иллюстративных вариантах осуществления, уровень тяги может быть настроен посредством управления количеством топлива, выталкиваемого двигателем в течение заданного промежутка времени. В других вариантах осуществления, уровень тяги может быть определен посредством скорости, с которой топливо выбрасывается из двигателя. При использовании здесь, термин «крутящие моменты» относится к моменту вектора тяги, генерируемому двигателем относительно оси, связанной с обслуживающим спутником или основным спутником. Этот момент может определять как произведение уровня тяги и длины перпендикуляра между вектором тяги и этой осью. Также, при использовании здесь, термин «уравновешенный» относится к обнулению крутящих моментов. Таким образом, например, упомянутый по меньшей мере один контроллер согласно настоящему раскрытию может выбрать уровни тяги упомянутых по меньшей мере двух двигателей таким образом, чтобы крутящий момент, генерируемый вектором тяги одного из двух двигателей, был в точности равен и противоположен крутящему моменту, генерируемому вектором тяги второго из двух двигателей. Результирующий крутящий момент, получающийся из суммы генерируемых крутящих моментов, может быть по существу равным нулю. Также предполагается, что в некоторых иллюстративных вариантах осуществления, уравновешивание крутящих моментов может быть достигнуто на основе более чем двух двигателей.
[069] Фиг. 4А и 4В, например, показывают конфигурации, в которых крутящие моменты могут быть уравновешены. Таким образом, в иллюстративном варианте осуществления фиг. 4А, контроллер 120 может ориентировать рычаги 90 и 92 двигателей с угловыми смещениями Θ2 (положение Р2) и Θ3 (положение Р3), соответственно. Контроллер 120 может включать двигатели 36, 38 для генерирования векторов 122, 124 тяги, соответственно. Каждый из векторов 122 и 124 тяги может генерировать крутящий момент относительно оси y координат обслуживающего спутника 10. Действие крутящих моментов, генерируемых векторами 122, 124 тяги, в форме вращательного усилия, действующего на соединенный блок 206, показано на фиг. 4А стрелкой 148.
[070] Подобным образом, в иллюстративном варианте осуществления, показанном на фиг. 4В, контроллер 120 может ориентировать рычаги 90 и 92 двигателей с угловыми смещениями Θ3 (положение Р3) и Θ2 (положение Р2), соответственно. Контроллер 120 может включать двигатели 36 и 38 для генерирования векторов 132, 134 тяги, соответственно. Каждый из векторов 132 и 134 тяги может генерировать крутящий момент относительно оси y координат обслуживающего спутника 10. Действие крутящих моментов, генерируемых векторами 132, 134 тяги, в форме вращательного усилия, действующего на соединенный блок 206, показано на фиг. 4В стрелкой 152. Контроллер 120 может выбрать уровни тяги двигателей 36 и 38 таким образом, чтобы величина и направление крутящего момента, представленного стрелкой 148 (фиг. 4А) были в точности равны и противоположны величине и направлению крутящего момента, представленного стрелкой 152 (фиг. 4В). Другими словами, контроллер 120 может выбрать уровни тяги двигателей 36 и 38 таким образом, чтобы сумма векторов крутящих моментов, представленных стрелками 148 и 152, могла быть по существу равной нулю. Предполагается, что уровни тяги двигателей 36 и 38 могут быть равными или неравными.
[071] Фиг. 5A, 5B, и 5C показывают иллюстративные конфигурации, в которых крутящие моменты могут быть уравновешены относительно двух осей. Фиг. 5А показывает вид соединенного блока 206, причем ось z координат расположена, в общем, перпендикулярно фронтальному плоскому участку поверхности, показанному на фиг. 5А. В некоторых иллюстративных вариантах осуществления, как показано на фиг. 5А, ось z на этой фигуре может быть продольной осью, которая может проходить вдоль центральной линии как обслуживающего спутника 10, так и основного спутника 200, образующих соединенный блок 206. Двигатели 36 и 38 могут быть ориентированы в положениях Р2 и Р3, соответственно, подобных положениям, показанным на фиг. 4А. Контроллер 120 может выбрать уровни тяги для двигателей 36 и 38 таким образом, чтобы крутящие моменты, генерируемые относительно оси z векторами 122, 124 тяги, могли по существу уравновесить друг друга, как показано двумя противоположными стрелками 69 на фиг. 5А.
[072] Подобным образом, фиг. 5В показывает вид соединенного блока 206, в котором ось y координат может быть расположена, в общем, перпендикулярно фронтальному плоскому участку поверхности, показанному на фиг. 5В. Ось y может быть также, в общем, перпендикулярной оси z. Когда двигатели 36 и 38 находятся в положениях Р2 и Р3 (см. фиг. 4А), соответственно, векторы 122 и 124 тяги могут генерировать крутящие моменты относительно оси y. Эти крутящие моменты могут быть представлены стрелкой, показанной на фиг. 5В, и могут быть подобными стрелке 148 на фиг. 4А. Как будет описано ниже, эти крутящие моменты могут генерировать момент импульса, который может сохраняться в реактивном колесе. Когда положения двигателей 36 и 38 меняются таким образом, что двигатель 36 находится в положении Р3, а двигатель 38 находится в положении Р2 (см. фиг. 4В), крутящие моменты, генерируемые векторами 132 и 134 тяги, как показано на фиг. 4В, могут разгрузить реактивное колесо и уменьшить сохраняемый момент импульса реактивного колеса, в результате чего по существу обеспечивается уравновешивание результирующих крутящих моментов, генерируемых относительно оси y.
[073] Фиг. 5С показывает вид соединенного блока 206, в котором ось x координат может быть расположена, в общем, перпендикулярно фронтальному плоскому участку поверхности, показанному на фиг. 5С. Ось x может быть также, в общем, перпендикулярной осям y и z. Двигатели 36 и 38 могут быть ориентированы в положения Р2 и Р3, соответственно (см. фиг. 4А). Контроллер 120 может выбрать уровни тяги для двигателей 36 и 38 таким образом, чтобы крутящие моменты, генерируемые относительно оси x векторами 122, 124 тяги, могли по существу уравновесить друг друга, как показано двумя противоположными стрелками 71 на фиг. 5С.
[074] Согласно вариантам осуществления настоящего раскрытия, контроллер может быть выполнен с возможностью включения упомянутых по меньшей мере двух двигателей с первым уровнем тяги, когда первый двигатель ориентирован в первую угловую ориентацию. Контроллер может быть также выполнен с возможностью включения упомянутых по меньшей мере двух двигателей со вторым уровнем тяги, отличным от первого уровня тяги, когда первый двигатель ориентирован во вторую угловую ориентацию. В некоторых иллюстративных вариантах осуществления, контроллер может выбрать уровни тяги для двигателей на основе их положения и/или ориентации. Например, контроллер может включить двигатель в положении Р2 с первым уровнем TH1 тяги, и включить двигатель в положении Р3 со вторым уровнем TH2 тяги. В других иллюстративных вариантах осуществления, контроллер может включить оба из упомянутых по меньшей мере двух двигателей с первым уровнем TH1 тяги, когда первый двигатель из упомянутых по меньшей мере двух двигателей ориентирован в одно из положений Р2 или Р3. Контроллер может включить оба из упомянутых по меньшей мере двух двигателей с первым уровнем TH1 тяги, когда первый двигатель из упомянутых по меньшей мере двух двигателей ориентирован во второе из положений Р2 или Р3. Предполагается, что уровни TH1 и TH2 тяги могут быть равными или неравными.
[075] Фиг. 4А и 4В показывают иллюстративные варианты осуществления, в которых контроллер 120 может быть выполнен с возможностью включения двигателей 36, 38, 40, 42 с разными уровнями тяги. В иллюстративном варианте осуществления фиг. 4А, контроллер 120 может ориентировать рычаги 90 и 92 двигателей с угловыми смещениями Θ2 (положение Р2) и Θ3 (положение Р3), соответственно. Контроллер 120 может включить двигатели 36 и 38 с уровнем TH1 тяги для генерирования векторов 122, 124 тяги, соответственно. Контроллер 120 может включить оба двигателя 36 и 38 с уровнем TH1 тяги, когда двигатель 36 ориентирован в положение Р2. В иллюстративном варианте осуществления фиг. 4В, контроллер 120 может ориентировать рычаги 90 и 92 двигателей с угловыми смещениями Θ3 (положение Р3) и Θ2 (положение Р2), соответственно. Контроллер 120 может включить двигатели 36 и 38 с уровнем TH2 тяги для генерирования векторов 132, 134 тяги, соответственно. Контроллер 120 может включить оба двигателя 36 и 38 с уровнем TH2 тяги, когда двигатель 36 ориентирован в положение Р2.
[076] Согласно некоторым вариантам осуществления настоящего раскрытия, контроллер может быть выполнен с возможностью определения второго уровня тяги. Контроллер может быть выполнен с возможностью осуществления этого посредством включения упомянутых по меньшей мере двух двигателей с первым уровнем тяги, когда первый двигатель ориентирован в первую угловую ориентацию. Контроллер может быть также выполнен с возможностью определения момента импульса относительно по меньшей мере одной оси координат соединенного блока. Дополнительно, контроллер может быть выполнен с возможностью определения второго уровня тяги, с которым упомянутые по меньшей мере два двигателя должны быть включены, когда первый двигатель ориентирован во вторую угловую ориентацию, таким образом, чтобы момент импульса по существу уменьшился до нуля. При использовании здесь, термин «момент импульса» относится к произведению момента инерции вращения объекта и его частоты вращения относительно оси вращения. Контроллер может определять момент импульса многими способами. В некоторых иллюстративных вариантах осуществления, контроллер может определять частоту вращения или угловую скорость соединенного блока на основе датчиков, расположенных в обслуживающем спутнике или основном спутнике. Контроллер может также определять момент инерции вращения соединенного блока на основе распределений масс в обслуживающем спутнике и основном спутнике. Контроллер может определять момент импульса соединенного блока на основе определенной частоты вращения и момента инерции вращения. В других иллюстративных вариантах осуществления, момент импульса может быть определен измерениями с использованием датчика момента импульса. В других иллюстративных вариантах осуществления, момент импульса может быть определен на основе изменения частоты вращения реактивного колеса, связанного с обслуживающим спутником или основным спутником.
[077] Фиг. 4А и 4В показывают иллюстративные варианты осуществления, в которых контроллер может быть выполнен с возможностью определения уровней тяги на основе момента импульса. В иллюстративном варианте осуществления фиг. 4А, контроллер 120 может ориентировать рычаги 90 и 92 двигателей с угловыми смещениями Θ2 (положение Р2) и Θ3 (положение Р3), соответственно. Контроллер 120 может включить двигатели 36 и 38 с уровнем TH1 тяги для генерирования векторов 122, 124 тяги, соответственно. Контроллер 120 может включить оба двигателя 36 и 38 с уровнем TH1 тяги, когда рычаг 90 двигателя ориентирован с угловым смещением Θ2 (положение Р2). Контроллер 120 может определить момент AM1 импульса соединенного блока 206, включающего в себя обслуживающий спутник 10 и основной спутник 200, относительно по меньшей мере одной оси координат обслуживающего спутника. Таким образом, например, контроллер 120 может определить момент AM1 импульса, генерируемый относительно оси y, как показано на фиг. 5В. Контроллер 120 может определить момент AM1 импульса на основе распределения масс обслуживающего спутника 10 и основного спутника 200, угловых скоростей обслуживающего спутника 10 и основного спутника 200 относительно оси y, и расстояний различных частей обслуживающего спутника 10 и основного спутника 200 до оси y. В некоторых иллюстративных вариантах осуществления, контроллер 120 может определить момент AM1 импульса с использованием одного или нескольких датчиков момента импульса, находящихся в обслуживающем спутнике 10, и/или с использованием одного или нескольких маховиков, расположенных в обслуживающем спутнике 10.
[078] В иллюстративном варианте осуществления фиг. 4В, контроллер 120 может ориентировать рычаги 90 и 92 двигателей с угловыми смещениями Θ3 (положение Р3) и Θ2 (положение Р2), соответственно. Контроллер 120 может определить уровень TH2 тяги, с которым контроллер 120 должен включить двигатели 36 и 38, таким образом, чтобы момент AM2 импульса, генерируемый относительно, например, оси y (как показано на фиг. 5В) был в точности равен и противоположен моменту AM1 импульса, создаваемому, как описано выше в отношении варианта осуществления фиг. 4А. Контроллер 120 может включить оба двигателя 36 и 38 с уровнем TH2 тяги, когда рычаг 90 двигателя ориентирован с угловым смещением Θ3 (положение Р3), таким образом, чтобы суммарная величина момента AM1+AM2 была приблизительно равна нулю.
[079] Согласно вариантам осуществления настоящего раскрытия, упомянутый по меньшей мере один контроллер может быть выполнен с возможностью, в течение первого периода времени, позиционирования первого двигателя из упомянутых по меньшей мере двух двигателей в первую угловую ориентацию и включения первого двигателя. Упомянутый по меньшей мере один контроллер может быть также выполнен с возможностью, в течение первого периода времени, позиционирования второго двигателя из упомянутых по меньшей мере двух двигателей во вторую угловую ориентацию, отличную от первой угловой ориентации, и включения второго двигателя. Контроллер может позиционировать двигатели многими способами, и настоящее изобретение, в своем самом широком смысле, не ограничено никаким конкретным способом. В одном способе, например, контроллер может позиционировать оба двигателя в их относительные положения одновременно или последовательно. Контроллер может также включать оба двигателя одновременно или последовательно. В некоторых иллюстративных вариантах осуществления, контроллер может позиционировать первый двигатель в первое положение и включать первый двигатель в течение первой длительности включения, которая может быть меньшей, чем первый период времени. После включения первого двигателя в течение первой длительности включения, контроллер может позиционировать второй двигатель во второе положение и включать второй двигатель в течение второй длительности включения. В других иллюстративных вариантах осуществления, контроллер может позиционировать как первый, так и второй двигатели в их соответствующие первое и второе положения. После позиционирования обоих двигателей, контроллер может одновременно включать первый и второй двигатели в течение их соответствующих первой и второй длительностей включения.
[080] Фиг. 4А показывает иллюстративный вариант осуществления, в котором контроллер может быть выполнен с возможностью позиционирования двух двигателей и включения их в течение первого периода Т1 времени. В иллюстративном варианте осуществления фиг. 4А, контроллер 120 может ориентировать рычаг 90 двигателя с угловым смещением Θ2 (положение Р2). Контроллер 120 может включать двигатель 36 в течение длительности Δt1 включения, меньшей, чем первый период Т1 времени. По истечении времени Δt1, контроллер 120 может ориентировать рычаг 92 двигателя с угловым смещением Θ3 (положение Р3). Контроллер 120 может включать двигатель 38 в течение длительности Δt2 включения, которая может быть меньшей, чем первый период Т1 времени. Контроллер 120 может выбрать Δt1 и Δt2 таким образом, чтобы суммарное время Δt1+Δt2 могло быть меньшим, чем первый период Т1 времени. Альтернативно, контроллер 120 может одновременно ориентировать оба рычага 90, 92 двигателей с угловыми смещениями Θ2 (положение Р2) и Θ3 (положение Р3), соответственно. После ориентирования рычагов 90, 92 двигателей, контроллер 120 может одновременно или последовательно включать двигатели 36 и 38 в течение длительностей Δt1 и Δt2 включения, соответственно, таким образом, чтобы каждая длительность Δt1 и Δt2 включения могла быть меньшей, чем первый период Т1 времени. Длительности Δt1 и Δt2 включения могут быть равными или неравными.
[081] Согласно вариантам осуществления настоящего раскрытия, упомянутый по меньшей мере один контроллер может быть выполнен с возможностью, в течение второго периода времени, следующего за первым периодом времени, перемещения первого двигателя для обеспечения второй угловой ориентации и включения первого двигателя. Упомянутый по меньшей мере один контроллер может быть также выполнен с возможностью, в течение второго периода времени, перемещения второго двигателя для обеспечения первой угловой ориентации и включения второго двигателя. В некоторых вариантах осуществления настоящего раскрытия, контроллер может быть выполнен с возможностью изменения положений первого и второго двигателей по прошествии первого периода времени. Таким образом, например, контроллер может быть выполнен с возможностью позиционирования первого двигателя во второе положение, а второго двигателя в первое положение, в течение второго периода времени. Контроллер может позиционировать оба двигателя в их соответствующие положения одновременно или последовательно. Контроллер может также включать оба двигателя одновременно или последовательно. В некоторых иллюстративных вариантах осуществления, контроллер может позиционировать первый двигатель во второе положение и включать первый двигатель в течение второй длительности включения. После включения первого двигателя в течение второй длительности включения, контроллер может позиционировать второй двигатель в первое положение и включать второй двигатель в течение первой длительности включения. В других иллюстративных вариантах осуществления, контроллер может позиционировать как первый, так и второй двигатели в их соответствующие второе и первое положения, соответственно. После позиционирования обоих двигателей, контроллер может включать как первый, так и второй двигатели в течение их соответствующих второй и первой длительностей включения.
[082] Фиг. 4В показывает иллюстративный вариант осуществления, в котором контроллер может быть выполнен с возможностью перепозиционирования двух двигателей и включения их в течение второго периода T2 времени. В иллюстративном варианте осуществления фиг. 4В, по истечении первого периода T1 времени, контроллер 120 может ориентировать рычаг 90 двигателя с угловым смещением Θ3 (положение Р3). Контроллер 120 может включать двигатель 36 в течение длительности Δt3 включения, меньшей, чем второй период T2 времени. По истечении длительности Δt3 включения, контроллер 120 может ориентировать рычаг 92 двигателя с угловым смещением Θ2 (положение Р2). Контроллер 120 может включать двигатель 38 в течение длительности Δt4 включения, которая может быть меньшей, чем второй период T2 времени. Контроллер 120 может выбрать Δt3 и Δt4 таким образом, чтобы суммарная длительность Δt3+Δt4 включения могла быть меньшей, чем второй период T2 времени. Альтернативно, контроллер 120 может одновременно ориентировать оба рычага 90, 92 двигателей с угловыми смещениями Θ3 (положение Р3) и Θ2 (положение Р2), соответственно. После ориентирования рычагов 90, 92 двигателей, контроллер 120 может одновременно или последовательно включать двигатели 36 и 38 в течение длительностей Δt3 и Δt4 включения, соответственно, таким образом, чтобы каждая из Δt3 и Δt4 могла быть меньшей, чем второй период T2 времени. Длительности Δt3 и Δt4 включения могут быть равными или неравными. Длительности Δt3 и Δt4 включения могут быть также равными любым из длительностей Δt1 и Δt2 включения или отличными от них.
[083] Согласно настоящему раскрытию, упомянутый по меньшей мере один контроллер может быть дополнительно выполнен с возможностью перемещения одной из первой пары двигателей и второй пары двигателей в первую угловую ориентацию. В некоторых иллюстративных вариантах осуществления согласно настоящему раскрытию, обслуживающий спутник может иметь более одной пары двигателей. В этих иллюстративных вариантах осуществления, контроллер может быть выполнен с возможностью перемещения одной пары двигателей таким образом, чтобы оба двигателя в этой паре имели одну и ту же ориентацию. Контроллер может ориентировать два двигателя в этой первой паре посредством настройки положений механизмов развертывания двигателей, связанных с упомянутыми двумя двигателями.
[084] Упомянутый по меньшей мере один контроллер согласно настоящему раскрытию может быть также выполнен с возможностью перемещения второго двигателя из первой пары двигателей и второй пары двигателей во вторую угловую ориентацию, отличную от первой угловой ориентации. В некоторых иллюстративных вариантах осуществления, контроллер может выбрать вторую пару двигателей, отличную от первой пары. Контроллер может быть выполнен с возможностью перемещения второй пары двигателей таким образом, чтобы оба двигателя в этой второй паре имели одну и ту же ориентацию. Контроллер может ориентировать два двигателя во второй паре двигателей посредством настройки положений механизмов развертывания двигателей, связанных с двумя двигателями во второй паре двигателей.
[085] Согласно настоящему раскрытию, контроллер может быть выполнен с возможностью выбора первой и второй угловых ориентаций таким образом, чтобы векторы тяги первой пары двигателей и второй пары двигателей не проходили через совместный центр масс и были смещены от совместного центра масс. Это может быть обеспечено, например, когда по меньшей мере один контроллер настраивает положения одного или нескольких конструктивных элементов механизмов развертывания двигателей, связанных с первой и второй парой двигателей таким образом, чтобы когда первая и вторая пара двигателей будет включаться, векторы тяги, генерируемые как первой парой двигателей, так и второй парой двигателей, не проходили через совместный центр масс обслуживающего спутника и основного спутника. В некоторых иллюстративных вариантах осуществления, контроллер может выбрать ориентацию первой пары двигателей и второй пары двигателей таким образом, чтобы векторы тяги первой и второй пары двигателей были пространственно отделены (т.е. смещены) от совместного центра масс обслуживающего спутника и основного спутника. В других иллюстративных вариантах осуществления, контроллер может выбрать ориентацию первой пары двигателей и второй пары двигателей таким образом, чтобы векторы тяги первой и второй пары двигателей не проходили через никакой совместный центр масс из множества совместных центров масс, которые могут обеспечиваться в результате соединения обслуживающего спутника с множеством основных спутников, где каждый основной спутник имеет отличный центр масс.
[086] Фиг. 6А и 6В показывают иллюстративные варианты осуществления, в которых контроллер может быть выполнен с возможностью ориентирования первой и второй пары двигателей в разные ориентации. Например, как показано на фиг. 6А, упомянутый по меньшей мере один контроллер 120 может ориентировать первую пару 50 двигателей в первую ориентацию. Контроллер 120 может ориентировать рычаг 90 двигателя с угловым смещением Θ4 относительно первой вилки 66 развертывания двигателей. Угловое смещение Θ4 может определять положение Р4 для двигателя 36. Контроллер 120 может ориентировать рычаг 92 двигателя с угловым смещением Θ4 относительно первой вилки 66 развертывания двигателей. Таким образом, например, оба двигателя 36 и 38 могут находиться в положении Р4, когда рычаги 90, 92 двигателей ориентированы с угловым смещением Θ4. Контроллер 120 может включать двигатели 36, 38. Включенные двигатели 36, 38 могут генерировать векторы 160, 162 тяги, соответственно. Как показано на фиг. 6А, векторы 160, 162 тяги могут не проходить через совместный центр 126 масс соединенного блока 206. В некоторых иллюстративных вариантах осуществления, как показано на фиг. 6А, векторы 160, 162 тяги могут пересекаться друг с другом в точке 164 пересечения, которая может быть смещена (т.е. расположена на расстоянии) от совместного центра 126 масс. Предполагается, что вследствие фиксированной ориентации вектора тяги на фиг. 6А, обслуживающий спутник 10 может стыковаться с множеством разных основных спутников, каждый из которых имеет отличный центр масс, и точка 164 пересечения может быть пространственно отделена от совместных центров масс всех таких тандемных модулей, независимо от точного местоположения совместного центра масс в каждом случае.
[087] Как показано на фиг. 6В, упомянутый по меньшей мере один контроллер 120 может ориентировать вторую пару 52 двигателей во вторую ориентацию. Например, контроллер 120 может ориентировать рычаг 94 двигателя с угловым смещением Θ5 относительно второй вилки 68 развертывания двигателей. Угловое смещение Θ5 может определять положение Р5 для двигателя 40. Контроллер 120 может также ориентировать рычаг 96 двигателя с угловым смещением Θ5 относительно второй вилки 68 развертывания двигателей. Таким образом, например, двигатели 40 и 42 могут находиться в положении Р5, когда рычаги 94, 96 двигателей ориентированы с угловым смещением Θ5. Контроллер 120 может включать двигатели 40, 42. Включенные двигатели 36, 38 могут генерировать векторы 166, 168 тяги, соответственно. Как показано на фиг. 6В, векторы 166, 168 тяги могут не проходить через совместный центр 126 масс соединенного блока 206. В некоторых иллюстративных вариантах осуществления, как показано на фиг. 6В, векторы 166, 168 тяги могут быть, в общем, параллельны друг другу и могут быть расположены на расстоянии от совместного центра 126 масс. Независимо от конкретного центра масс основного спутника, подобным образом предполагается, что будет существовать такая универсальная ориентация двигателей, что векторы 166, 168 тяги будут расположены на расстоянии от любого совместного центра масс, независимо от местоположения совместного центра масс тандемного модуля.
[088] Согласно вариантам осуществления настоящего раскрытия, упомянутый по меньшей мере один контроллер может быть выполнен с возможностью включения двигателей, расположенных в первой угловой ориентации, с первым уровнем тяги. Упомянутый по меньшей мере один контроллер может быть также выполнен с возможностью включения двигателей, расположенных во второй угловой ориентации, со вторым уровнем тяги, отличным от первого уровня тяги, таким образом, чтобы крутящие моменты, генерируемые векторами тяги относительно по меньшей мере одной оси соединенного блока, были по существу уравновешенными. В некоторых иллюстративных вариантах осуществления согласно настоящему раскрытию, упомянутый по меньшей мере один контроллер может выбирать уровни тяги первой пары двигателей и второй пары двигателей. Контроллер может выбрать уровни тяги таким образом, чтобы крутящий момент, генерируемый векторами тяги первой пары двигателей относительно оси обслуживающего спутника, был в точности равен и противоположен крутящему моменту, генерируемому векторами тяги второй пары двигателей из двух двигателей.
[089] Фиг. 6А и 6В, например, показывают конфигурации, которые контроллер 120 может использовать для уравновешивания крутящих моментов. Таким образом, например, в иллюстративном варианте осуществления фиг. 6А, контроллер 120 может ориентировать оба рычага 90, 92 двигателей с одним и тем же угловым смещением Θ4 (положение Р4). Контроллер 120 может включать двигатели 36 и 38 для генерирования векторов 160, 162 тяги, соответственно. Векторы 160, 162 тяги могут генерировать крутящие моменты относительно, например, оси x, которая может быть расположена, в общем, перпендикулярно плоскости 62 (см. фиг. 4В). Вращательное усилие, оказываемое на соединенный блок 206 в результате генерируемых крутящих моментов, может быть представлено стрелкой 170.
[090] Подобным образом, в иллюстративном варианте осуществления, показанном на фиг. 6В, контроллер 120 может ориентировать оба рычага 94, 96 двигателей с одним и тем же угловым смещением Θ5 (положение Р5). Контроллер 120 может включать двигатели 40 и 42 для генерирования векторов 168, 170 тяги, соответственно. Векторы 168 и 170 тяги могут генерировать крутящие моменты относительно, например, оси x. Вращательное усилие, оказываемое на соединенный блок 206 в результате генерируемых крутящих моментов, может быть представлено стрелкой 172. Контроллер 120 может выбрать уровни тяги двигателей 36, 38, 40, и 42 таким образом, чтобы крутящий момент, представленный стрелкой 170, был в точности равен и противоположен крутящему моменту, представленному стрелкой 172, в результате чего обеспечивается уравновешивание или обнуление результирующего крутящего момента относительно оси x. Предполагается, что уровни тяги двигателей 36, 38, 40, и 42 могут быть равными или неравными.
[091] В некоторых иллюстративных вариантах осуществления согласно настоящему раскрытию, упомянутый по меньшей мере один контроллер может быть выполнен с возможностью одновременного включения первой пары двигателей в течение первого промежутка времени. Упомянутый по меньшей мере один контроллер может быть также выполнен с возможностью одновременного включения второй пары двигателей в течение второго промежутка времени. Термин «одновременно», используемый здесь, указывает на то, что два двигателя, включенные в первую или вторую пару двигателей, включают приблизительно в одно и то же время и в течение приблизительно одного и того же промежутка времени. Термин «одновременно» охватывает вариант осуществления, в котором могут существовать небольшие временные различия (порядка, например, 0,5 секунд) между временем, в которое включение инициируется или прекращается, в каждом из двух двигателей, включенных в первую или вторую пару двигателей. Термин «одновременно» также охватывает ситуации, в которых во время включения двигателей, каждый двигатель работает в импульсном режиме, и включения отдельных двигателей чередуются, таким образом, что в то время как множественные двигатели включаются в один и тот же промежуток времени, они могут не совмещаться по включению в пределах этого промежутка времени. Упомянутый по меньшей мере один контроллер может выбрать первый и второй промежутки времени и уровни тяги первой и второй пары двигателей таким образом, чтобы крутящие моменты, генерируемые первой и второй парой двигателей относительно по меньшей мере одной оси обслуживающего спутника, обнулялись. Первый промежуток времени и второй промежуток времени могут быть равными или неравными.
[092] Фиг. 6А и 6В, например, показывают конфигурации, в которых контроллер 120 может одновременно включать первую и вторую пару двигателей. Например, когда двигатели 36 и 38 ориентированы в ориентацию Р4, как показано на фиг. 6А, контроллер 120 может включать двигатели 36 и 38 одновременно в течение первого промежутка T1 времени. Подобным образом, когда двигатели 40 и 42 ориентированы, например, в ориентацию Р5, как показано на фиг. 6В, контроллер 120 может включать двигатели 40 и 42 одновременно в течение второго промежутка T2 времени. Промежутки T1 и T2 времени могут быть равными или неравными.
[093] Согласно вариантам осуществления настоящего раскрытия, контроллер может быть дополнительно выполнен с возможностью перемещения первой пары двигателей во вторую угловую ориентацию, и перемещения второй пары двигателей в первую угловую ориентацию по прошествии третьего промежутка времени. Контроллер может быть также выполнен с возможностью одновременного включения второй пары двигателей в течение первого промежутка времени после перемещения первой пары двигателей и второй пары двигателей. В некоторых иллюстративных вариантах осуществления, контроллер может начинать отсчитывать третий промежуток времени по истечении первого промежутка времени и второго промежутка времени. В этих вариантах осуществления, третий промежуток времени может быть нулевым или ненулевым. В других иллюстративных вариантах осуществления, контроллер может начинать отсчитывать третий промежуток времени с момента времени, когда первая пара двигателей начинает работать. В этих вариантах осуществления, третий промежуток времени может быть приблизительно равным или большим, чем по меньшей мере сумма первого и второго промежутка времени.
[094] В качестве неограничивающих примеров, фиг. 7А и 7В показывают положения первой и второй пары двигателей по прошествии третьего промежутка T3 времени. В иллюстративном варианте осуществления фиг. 7А, контроллер 120 может ориентировать оба рычага 90 и 92 двигателей с одним и тем же угловым смещением Θ5 (положение Р5). Контроллер 120 может включать двигатели 36 и 38 в течение первого промежутка T1 времени. Как показано в иллюстративном варианте осуществления фиг. 7В, контроллер может ориентировать оба рычага 94 и 96 двигателей с одним и тем же угловым смещением Θ4 (положение Р4). Контроллер 120 может включать двигатели 40 и 42 в течение второго промежутка T2 времени.
[095] Согласно некоторым вариантам осуществления настоящего раскрытия, упомянутый по меньшей мере один контроллер может быть выполнен с возможностью включения двигателей, расположенных в первой угловой ориентации, с заданным уровнем тяги в течение первого промежутка времени. Контроллер может быть также выполнен с возможностью включения двигателей, расположенных во второй угловой ориентации, с заданным уровнем тяги в течение второго промежутка времени, отличного от первого промежутка времени, таким образом, чтобы крутящие моменты, генерируемые векторами тяги относительно по меньшей мере одной оси соединенного блока, были по существу уравновешенными. В некоторых иллюстративных вариантах осуществления, первый и второй промежутки времени могут быть равными. В других иллюстративных вариантах осуществления, первый и второй промежутки времени могут быть неравными. Также предполагается, что в некотором иллюстративном варианте осуществления контроллер может включать первую и вторую пару двигателей одновременно.
[096] В качестве неограничивающих примеров, фиг. 6А и 6В показывают конфигурацию первой и второй пары двигателей. Как показано в иллюстративном варианте осуществления фиг. 6А, контроллер 120 может ориентировать оба рычага 90 и 92 двигателей с одним и тем же угловым смещением Θ4 (положение Р4). Контроллер 120 может включать двигатели 36 и 38 с заданным уровнем THPRE тяги в течение первого промежутка T1 времени. Как показано в иллюстративном варианте осуществления фиг. 6В, контроллер 120 может ориентировать оба рычага 94 и 96 двигателей с одним и тем же угловым смещением Θ5 (положение Р5). Контроллер 120 может включать двигатели 40 и 42 с заданным уровнем THPRE тяги в течение второго промежутка T2 времени.
[097] Согласно некоторым вариантам осуществления настоящего раскрытия, контроллер может быть выполнен с возможностью определения второго промежутка времени. Контроллер может быть выполнен с возможностью осуществления этого посредством включения двигателей, расположенных в первой угловой ориентации, с заданным уровнем тяги в течение первого промежутка времени. Контроллер может быть также выполнен с возможностью определения момента импульса относительно по меньшей мере одной оси координат соединенного спутника. Дополнительно, контроллер может быть выполнен с возможностью определения второго промежутка времени, в течение которого двигатели, расположенные во второй угловой ориентации, должны быть включены для уменьшения момента импульса по существу до нуля.
[098] В качестве неограничивающих примеров на фиг. 6А и 6В, контроллер 120 может ориентировать оба рычага 90, 92 двигателей с одним и тем же угловым смещением Θ4 (положение Р4). Контроллер 120 может включать двигатели 36 и 38 с заданным уровнем THPRE тяги в течение первого промежутка T1 времени. Контроллер 120 может определить величину момента AM1 импульса, генерируемого относительно, например, оси x соединенного блока 206 (см. фиг. 5С). Контроллер 120 может определить второй промежуток T2 времени включения двигателей 40, 42 с заданным уровнем THPRE тяги таким образом, чтобы момент AM2 импульса, генерируемый векторами 168, 170 тяги относительно оси x, был в точности равен моменту AM1 импульса и имел противоположный знак. Другими словами, контроллер 120 может определить время T2 таким образом, чтобы результирующий момент AM1+AM2 импульса был по существу равен нулю.
[099] В некотором иллюстративном варианте осуществления настоящего раскрытия, первый промежуток времени является количеством времени, по прошествии которого реактивное колесо обслуживающего спутника является полностью загруженным, а второй промежуток времени является количеством времени, после которого реактивное колесо является полностью разгруженным. Некоторые аспекты настоящего раскрытия могут включать в себя одно или несколько реактивных колес, расположенных на борту обслуживающего спутника. При использовании здесь, термин «реактивное колесо» относится к устройству, способному сохранять момент импульса. В некоторых иллюстративных вариантах осуществления, реактивное колесо может включать в себя маховик, способный вращаться относительно оси вращения. Реактивное колесо может сохранять момент импульса посредством сопутствующего увеличения частоты вращения маховика. Реактивное колесо может иметь заданную минимальную частоту вращения и заданную максимальную частоту вращения и может считаться полностью загруженным, когда оно достигает своей заданной максимальной частоты вращения.
[0100] В качестве неограничивающих примеров, как показано на фиг. 6А, контроллер 120 может ориентировать оба рычага 90 и 92 двигателей с одним и тем же угловым смещением Θ4 (положение Р4). Контроллер 120 может включать двигатели 36 и 38 с заданным уровнем THPRE тяги до тех пор, пока реактивное колесо в обслуживающем спутнике 10 не станет полностью загруженным (т.е. достигнет своей заданной максимальной частоты вращения). Промежуток времени, необходимый реактивному колесу для полной загрузки, может быть первым промежутком T1 времени. После полной загрузки реактивного колеса, контроллер 120 может прекратить включать двигатели 36, 38 и начать вместо этого включать двигатели 40, 42 (см. фиг. 6В). Контроллер 120 может продолжать включать двигатели 40, 42 до тех пор, пока реактивное колесо не станет полностью разгруженным (т.е. достигнет своей заданной минимальной частоты вращения). Промежуток времени, необходимый для полной разгрузки реактивного колеса, может быть вторым промежутком T2 времени.
[0101] Согласно некоторым иллюстративным вариантам осуществления настоящего раскрытия, контроллер может быть выполнен с возможностью последовательного включения первой пары двигателей и второй пары двигателей. В качестве неограничивающих примеров на фиг. 6А и 6В, после ориентирования рычагов 90, 92, 94, и 96 двигателей, контроллер 120 может инициировать включение двигателей 36 и 38 в течение первого T1 промежутка времени. По истечении первого промежутка времени, контроллер 120 может инициировать включение двигателей 40 и 42 в течение второго промежутка T2 времени. Таким образом, контроллер 120 может включать вторую пару двигателей 40, 42 последовательно после включения первой пары двигателей 36, 38.
[0102] Согласно вариантам осуществления настоящего раскрытия, в течение третьего промежутка времени, по прошествии второго промежутка времени, контроллер может быть выполнен с возможностью перемещения первой пары двигателей во вторую угловую ориентацию и перемещения второй пары двигателей в первую угловую ориентацию. Контроллер может быть также выполнен с возможностью последовательного включения первой пары двигателей и второй пары двигателей после перемещения первой пары двигателей и второй пары двигателей. После включения двигателей 36 и 38 в течение первого промежутка T1 времени, и после включения двигателей 40 и 42 в течение второго промежутка T2 времени, контроллер 120 может быть выполнен с возможностью изменения положений двигателей 36, 38, 40, и 42 в течение третьего промежутка T3 времени. Таким образом, например, контроллер 120 может изменить ориентацию рычагов 90 и 92 двигателей с углового смещения Θ4 (положение Р4) (как на фиг. 6А) таким образом, чтобы рычаги 90 и 92 двигателей были ориентированы с угловым смещением Θ5 (положение Р5) (как на фиг. 7А). Подобным образом, контроллер 120 может изменить ориентацию рычагов 94 и 96 двигателей с одного и того же углового смещения Θ5 (положение Р5) (как на фиг. 6А) на угловое смещение Θ4 (положение Р4) (как на фиг. 7А) в течение промежутка T3 времени. Контроллер 120 может изменить ориентации рычагов 90, 92, 94, и 96 двигателей одновременно или последовательно в любом порядке. После переориентирования рычагов 90, 92, 94, и 96 двигателей, контроллер 120 может включать либо двигатели 36, 38, либо двигатели 40, 42, с заданным уровнем THPRE тяги в течение первого промежутка T1 времени. По истечении промежутка T1 времени, контроллер 120 может включать другую пару двигателей 36, 38 или двигателей 40, 42 с заданным уровнем THPRE тяги в течение второго промежутка T2 времени.
[0103] Настоящее раскрытие может также относиться к способу обеспечения услуг по поддержанию положения для основного спутника. Как обсуждалось выше, поддержание положения может включать в себя маневры, связанные с обеспечением компенсирующих смещений, требуемых для поддержания основного спутника в его выделенном положении на геостационарной орбите. В некоторых иллюстративных вариантах осуществления, способ может включать в себя этап запуска обслуживающего спутника в космос, и этап маневрирования им с точностью до стыковочного расстояния основного спутника. Термин «запуск» относится, в общем, к выводу обслуживающего спутника на некоторую орбиту в космосе. Согласно некоторым аспектам настоящего раскрытия, обслуживающий спутник может быть запущен в космос на летательном аппарате-носителе или ракете-носителе, которая летит с Земли в космос. Летательный аппарат-носитель или ракета-носитель могут отделить обслуживающий спутник на заданной орбите в космосе. Согласно другим аспектам настоящего раскрытия, обслуживающий спутник может быть запущен в космос на летательном аппарате-носителе многоразового использования, например, на космическом челноке. Спутник может отделиться от космического челнока на заданной орбите. Обслуживающий спутник может быть микроспутником, который может быть запущен в космос в общем летательном аппарате-носителе вместе с другими спутниками или с другой полезной нагрузкой.
[0104] Согласно некоторым иллюстративным вариантам осуществления настоящего раскрытия, способ обеспечения услуг по поддержанию положения для основного спутника может включать в себя этап соединения обслуживающего спутника с основным спутником для образования соединенного блока посредством сцепления по меньшей мере двух рычагов обслуживающего спутника с внешним стыковочным кольцом основного спутника. Соединенный блок может иметь совместный центр масс. В некоторых иллюстративных вариантах осуществления, способ может также включать в себя этап выборочного перемещения каждого из по меньшей мере двух двигателей обслуживающего спутника для включения во время маневров для поддержания положения, таким образом, чтобы векторы тяги упомянутых по меньшей мере двух двигателей не проходили через совместный центр масс и были смещены от совместного центра масс.
[0105] Фиг. 8 показывает иллюстративный способ 800 обеспечения услуг по поддержанию положения для основного спутника 200. Порядок и расположение этапов в способе 800 обеспечены для иллюстрации. Как будет понятно из этого раскрытия, для способа 800 могут быть реализованы модификации, посредством, например, добавления, объединения, удаления, и/или переупорядочения этапов способа 800. Некоторые этапы способа 800 описаны как выполняемые контроллером 120 обслуживающего спутника 10. Предполагается, однако, что эти этапы могут быть, дополнительно или альтернативно, выполнены контроллером, расположенным на наземной станции управления или на другом космическом аппарате. Также предполагается, что в некоторых иллюстративных вариантах осуществления контроллер 120 обслуживающего спутника 10 может выполнить раскрытые этапы на основе команд, принимаемых контроллером 120 от контроллера, расположенного на наземной станции управления или на другом космическом аппарате.
[0106] Способ 800 может включать в себя этап запуска обслуживающего спутника 10 (этап 802). Запуск обслуживающего спутника 10 может включать в себя загрузку обслуживающего спутника 10 в отсек полезной нагрузки летательного аппарата-носителя. Летательный аппарат-носитель может включать в себя реактивный снаряд, ракету, космический аппарат многоразового использования, космический челнок или любой другой носитель, выполненный с возможностью транспортирования обслуживающего спутника с Земли на орбиту. Таким образом, этап запуска обслуживающего спутника 10 может дополнительно включать в себя этап обеспечения полета космического аппарата-носителя с поверхности Земли в космос. Этап запуска обслуживающего спутника 10 может также включать в себя этап отделения обслуживающего спутника 10 на заданной орбите в космосе. В некоторых иллюстративных вариантах осуществления, обслуживающий спутник 10 может быть отделен на орбите, отличной от геостационарной орбиты.
[0107] Способ 800 может включать в себя этап маневрирования обслуживающего спутника 10 с точностью до стыковочного расстояния основного спутника 200 (этап 804). Этап маневрирования обслуживающего спутника 10 может включать в себя, например, этап ориентирования по меньшей мере двух из рычагов 90, 92, 94, 96 двигателей с угловым смещением Θ1 (положение Р1) относительно плоскости соответствующей вилки 66, 68 развертывания двигателей. Фиг. 1В показывает положение Р1 двигателей 36 и 40. Этап маневрирования обслуживающего спутника 10 может включать в себя, например, включение двух или более двигателей 36, 38, 40, 42, ориентированных в положение Р1, для перемещения обслуживающего спутника с точностью до заданного расстояния на геостационарной орбите. В некоторых иллюстративных вариантах осуществления, орбита обслуживающего спутника 10 может находиться на высоте, приблизительно, 42166 км.
[0108] Способ 800 может включать в себя этап соединения обслуживающего спутника 10 с основным спутником 200 (этап 806). Существует много путей для образования такого соединения, и данный способ в своем самом широком смысле не ограничен никакой конкретной конструкцией. В качестве примера, этап присоединения обслуживающего спутника 10 может включать в себя этап развертывания одного или нескольких стыковочных рычагов 16 обслуживающего спутника 10. Контроллер 120 обслуживающего спутника 10 может настроить стыковочные рычаги 16 таким образом, чтобы сцепляющиеся с кольцом части 34 одного или нескольких стыковочных рычагов могли быть позиционированы для приема стыковочного кольца 202 основного спутника 200. Контроллер 120 может настроить положения стыковочных рычагов 16 таким образом, чтобы сцепляющиеся с кольцом части 34 могли сцепиться со стыковочным кольцом 202 для сцепления со стыковочным кольцом 202 в одном или нескольких местоположениях. Этап сцепления со стыковочным кольцом 202 может позволить обслуживающему спутнику 10 состыковаться с основным спутником 200 для образования соединенного блока 206.
[0109] Способ 800 может включать в себя этап выборочного перемещения по меньшей мере двух двигателей обслуживающего спутника (этап 808). Существует много путей для перемещения двигателей, и данный способ в своем самом широком смысле не ограничен никакой конкретной конструкцией или логикой контроллера. В качестве примера, контроллер 120 обслуживающего спутника 10 может переместить два или более рычагов 90, 92, 94, 96 двигателей с одним из угловых смещений Θ2 (положение Р2), Θ3 (положение Р3), Θ4 (положение Р4), или Θ5 (положение Р5). Контроллер 120 может выбрать положения P2, P3, P4, или P5 таким образом, чтобы при включении одного или нескольких двигателей 36, 36, 40, 42, один или несколько векторов 122, 124, 132, 134, 160, 162, 166, или 168 тяги не проходили через совместный центр 126 масс.
[0110] Способ 800 может включать в себя этап включения одного или нескольких двигателей 36, 38, 40, 42 (этап 810). Например, контроллер 120 может включать один или несколько двигателей 36, 38, 40, 42 в течение одного или нескольких промежутков T1, T2, T3, и т.д. времени, чтобы помочь обеспечить то, чтобы основной спутник 200 мог оставаться в своей выделенной геостационарной области. Конечно, существует много путей, схем и методов синхронизации включения двигателей, и данный способ в своем самом широком смысле не ограничен никакими конкретными из них.
[0111] Согласно некоторым иллюстративным вариантам осуществления настоящего раскрытия, этап выборочного перемещения двигателей в способе обеспечения услуг по поддержанию положения для основного спутника может включать в себя следующие этапы. Способ может включать в себя этап позиционирования первого двигателя из упомянутых по меньшей мере двух двигателей в первую угловую ориентацию и этап включения первого двигателя в течение первого периода времени. Способ может также включать в себя этап позиционирования второго двигателя из упомянутых по меньшей мере двух двигателей во вторую угловую ориентацию, отличную от первой угловой ориентации, и этап включения второго двигателя в течение первого периода времени. Дополнительно, способ может включать в себя этап перемещения первого двигателя для обеспечения второй угловой ориентации и этап включения первого двигателя в течение второго периода времени, следующего за первым периодом времени. Дополнительно, способ может включать в себя этап перемещения второго двигателя для обеспечения первой угловой ориентации и этап включения второго двигателя в течение второго периода времени.
[0112] Фиг. 9 показывает иллюстративный способ 900 обеспечения услуг по поддержанию положения для основного спутника 200 посредством перемещения рычагов двигателей, как описано в примере, приведенном выше. Порядок и расположение этапов в способе 900 обеспечены для иллюстрации. Как будет понятно из этого раскрытия, для способа 900 могут быть реализованы модификации, посредством, например, добавления, объединения, удаления, и/или переупорядочения этапов способа 900. Некоторые этапы способа 900 описаны в нижеследующем раскрытии как выполняемые контроллером 120 обслуживающего спутника 10. Предполагается, однако, что эти этапы могут быть, дополнительно или альтернативно, выполнены контроллером, расположенным на наземной станции управления или на другом космическом аппарате. Также предполагается, что в некоторых иллюстративных вариантах осуществления контроллер 120 обслуживающего спутника 10 может выполнить раскрытые этапы на основе команд, принимаемых контроллером 120 от контроллера, расположенного на наземной станции управления или на другом космическом аппарате.
[0113] Способ 900 включает в себя этап ориентирования первого двигателя в положение Р2, а второго двигателя - в положение Р3 (этап 902). В одном иллюстративном варианте осуществления, контроллер 120 может ориентировать рычаг 90 двигателя с угловым смещением Θ2 относительно вилки 66 развертывания двигателей таким образом, чтобы двигатель 36 находился в положении Р2 (см. фиг. 4А). Контроллер 120 может также ориентировать рычаг 92 двигателя с угловым смещением Θ3 относительно вилки 66 развертывания двигателей таким образом, чтобы двигатель 38 находился в положении Р3 (см. фиг. 4А). Следует понимать, что способ, описанный со ссылкой на фиг. 9, не ограничен конкретным выбором двигателей и ориентаций. Например, в некоторых вариантах осуществления, контроллер 120 может вместо этого ориентировать рычаг 90 двигателя с угловым смещением Θ3 и ориентировать рычаг 92 двигателя с угловым смещением Θ2 (см. фиг. 4В).
[0114] Способ 900 может включать в себя этап включения первого и второго двигателей с первым уровнем тяги в течение первой длительности включения (этап 902). Например, когда двигатель 36 находится в положении Р2, и двигатель 38 находится в положении Р3 (см. фиг. 4А), контроллер 120 может включать двигатели 36 и 38 с уровнем TH1 тяги в течение первой длительности Δt1 включения.
[0115] Способ 900 может включать в себя этап определения крутящих моментов и/или моментов импульса относительно одной или нескольких осей координат (этап 904). В одном иллюстративном варианте осуществления, контроллер 120 может определить один или несколько крутящих моментов и/или моментов импульса относительно одной или нескольких из осей x, y, или z координат соединенного блока 206. Контроллер 120 может определить крутящие моменты и/или моменты импульса на основе измерений силы, частот вращения, которые могут быть получены от одного или нескольких датчиков, расположенных на обслуживающем спутнике 10 или основном спутнике 200. В одном иллюстративном варианте осуществления, контроллер 120 может определить крутящий момент F1 или момент AM1 импульса относительно оси x (см. например, фиг. 5С) обслуживающего спутника 10.
[0116] В одном иллюстративном варианте осуществления, контроллер 120 может выполнить этапы 902-906 в течение первого промежутка T1 времени. В других иллюстративных вариантах осуществления, в течение первого промежутка T1 времени, контроллер 120 может включать двигатели 36 и 38 одновременно. Также предполагается, что в некоторых вариантах осуществления в течение первого промежутка T1 времени контроллер 120 может включать двигатели 36 и 38 последовательно в любом порядке.
[0117] Способ 900 может включать в себя этап ориентирования первого двигателя в положение Р3, а второго двигателя - в положение Р2 (этап 908). На этапе 908 способа, контроллер 120 может изменить положения двигателей, выбранные, например, на этапе 902. Например, контроллер 120 может ориентировать рычаг 90 двигателя, ранее находившийся в положении Р2, с угловым смещением Θ3 относительно вилки 66 развертывания двигателей таким образом, чтобы двигатель 36 находился в положении Р3 (см. фиг. 4В). Подобным образом, контроллер 120 может ориентировать рычаг 92 двигателя, ранее находившийся в положении Р3, с угловым смещением Θ2 относительно вилки 66 развертывания двигателей таким образом, чтобы двигатель 38 находился в положении Р2 (см. фиг. 4В).
[0118] Способ 900 может включать в себя этап включения первого и второго двигателей со вторым уровнем тяги в течение второй длительности включения (этап 910). Например, когда двигатель 36 находится в положении Р3, и двигатель 38 находится в положении Р2, контроллер 120 может включать двигатели 36 и 38 с уровнем TH2 тяги в течение второй длительности Δt2 включения.
[0119] Способ 900 может включать в себя этап определения крутящих моментов и/или моментов импульса относительно одной или нескольких осей координат (этап 912). Контроллер 120 может выполнить один или несколько этапов, подобных этапам, описанным выше, в отношении, например, этапа 906. В одном иллюстративном варианте осуществления, контроллер 120 может определить крутящий момент F2 или момент AM2 импульса относительно оси x (см. например, фиг. 5В) обслуживающего спутника 10.
[0120] В одном иллюстративном варианте осуществления, контроллер 120 может выполнить этапы 908-912 в течение второго промежутка T2 времени. В других иллюстративных вариантах осуществления, в течение второго промежутка T2 времени, контроллер 120 может включать двигатели 36 и 38 одновременно. Также предполагается, что в некоторых вариантах осуществления в течение второго промежутка T2 времени контроллер 120 может включать двигатели 36 и 38 последовательно в любом порядке. Промежутки T1 и T2 времени могут быть равными или неравными.
[0121] Способ 900 может включать в себя этап определения первого и/или второго уровней тяги для обнуления результирующего крутящего момента и/или момента импульса (этап 914). В одном иллюстративном варианте осуществления, контроллер 120 может определить один или оба уровня TH1 и TH2 тяги таким образом, чтобы результирующий крутящий момент F1+F2 и/или результирующий момент AM1+AM2 импульса относительно, например, оси x, был по существу равен нулю.
[0122] Способ 900 может включать в себя этап включения двигателей с первым уровнем тяги при ориентации в положение Р2 (этап 916). В одном иллюстративном варианте осуществления, контроллер 120 может включать любой из двигателей 36, 38 с уровнем TH1 тяги, когда двигатели 36 и 38 ориентированы в положение Р2. Способ 900 может также включать в себя этап включения двигателей со вторым уровнем тяги при ориентации в положение Р3 (этап 918). В одном иллюстративном варианте осуществления, контроллер 120 может включать любой из двигателей 36, 38 с уровнем TH2 тяги, когда двигатели 36 и 38 ориентированы в положение Р3.
[0123] В то время как приведенное выше раскрытие описывает этапы 902-918 способа в отношении двигателей 36, 38, настоящее раскрытие в своем самом широком смысле не ограничено этой конфигурацией и никакой конкретной конструкцией или последовательностью включения двигателей или угловой ориентацией. Например, в некоторых вариантах осуществления согласно настоящему раскрытию, контроллер может выбрать рычаги 94, 96 двигателей вместо рычагов 90, 92 двигателей для ориентирования рычагов двигателя с одним из угловых смещений Θ2 или Θ3. Контроллер 120 может выполнить этапы 902-918 способа 900 с использованием двигателей 40, 42. Когда контроллер 120 сначала выполняет этапы 902-918 с использованием двигателей 40, 42, контроллер 120 может повторить этапы 902-918 с использованием другой пары двигателей 36, 38 по прошествии приблизительно 12 часов. Контроллер 120 может также повторить этапы 902-918 с использованием как пары двигателей 36, 38, так и пары двигателей 40, 42 по прошествии заданного периода времени, чтобы помочь обеспечить то, чтобы основной спутник оставался в своей выделенной геостационарной области.
[0124] Также предполагается, что в некоторых иллюстративных вариантах осуществления контроллер 120 может сначала выполнить этапы 902-918 с использованием двигателей 36, 40. Таким образом, например, на этапе 902, контроллер 120 может ориентировать рычаг 90 двигателя с угловым смещением Θ2 относительно вилки 66 развертывания двигателей таким образом, чтобы двигатель 36 находился в положении Р2. Контроллер 120 может также ориентировать рычаг 94 двигателя с угловым смещением Θ3 относительно вилки 68 развертывания двигателей таким образом, чтобы двигатель 42 находился в положении Р3. Подобным образом, на этапе 908, контроллер 120 может ориентировать рычаг 90 двигателя с угловым смещением Θ3 относительно вилки 66 развертывания двигателей таким образом, чтобы двигатель 36 находился в положении Р3. Контроллер 120 может также ориентировать рычаг 94 двигателя с угловым смещением Θ2 относительно вилки 68 развертывания двигателей таким образом, чтобы двигатель 42 находился в положении Р2. После выполнения этапов 902-918 с использованием двигателей 36, 40, контроллер может повторить этапы 902-918 с использованием рычагов 92, 96 двигателей и соответствующих двигателей 38, 42 по прошествии приблизительно 12 часов. Контроллер 120 может также повторить этапы 902-918 как с парой двигателей 36, 40, так и с парой двигателей 38, 42 по прошествии заданного периода времени, чтобы помочь обеспечить то, чтобы основной спутник оставался в его выделенной геостационарной области.
[0125] Фиг. 10 показывает другой иллюстративный способ 1000 обеспечения услуг по поддержанию положения для основного спутника 200. Порядок и расположение этапов в способе 1000 обеспечены для иллюстрации. Как будет понятно из этого раскрытия, для способа 900 могут быть реализованы модификации, посредством, например, добавления, объединения, удаления, и/или переупорядочения этапов способа 1000. Некоторые этапы способа 1000 описаны в нижеследующем раскрытии как выполняемые контроллером 120 обслуживающего спутника 10. Предполагается, однако, что эти этапы могут быть, дополнительно или альтернативно, выполнены контроллером, расположенным на наземной станции управления или на другом космическом аппарате. Также предполагается, что в некоторых иллюстративных вариантах осуществления контроллер 120 обслуживающего спутника 10 может выполнить раскрытые этапы на основе команд, принимаемых контроллером 120 от контроллера, расположенного на наземной станции управления или на другом космическом аппарате.
[0126] Способ 1000 включает в себя этап ориентирования первой пары двигателей в положение Р4, а второй пары двигателей - в положение Р5 (этап 1002). В одном иллюстративном варианте осуществления, контроллер 120 может ориентировать рычаги 90, 92 двигателей с угловым смещением Θ4 относительно вилки 66 развертывания двигателей таким образом, чтобы двигатели 36 и 38 могли быть в положении Р4 (см. фиг. 6А). Контроллер 120 может также ориентировать рычаги 94, 96 двигателей с угловым смещением Θ5 относительно вилки 68 развертывания двигателей таким образом, чтобы двигатели 40 и 42 могли быть в положении Р5 (см. фиг. 6А). Следует понимать, что способ, описанный в связи с фиг. 10, не ограничен никаким конкретным выбором двигателей и ориентаций. Например, в некоторых вариантах осуществления, контроллер 120 может вместо этого ориентировать рычаги 90 и 92 двигателей с угловым смещением Θ5 и ориентировать рычаги 94 и 96 двигателей с угловым смещением Θ4.
[0127] Способ 1000 может включать в себя этап включения первой пары двигателей с заданным уровнем тяги (этап 1004). Например, когда двигатели 36 и 38 находятся в положении Р4, контроллер 120 может включать двигатели 36 и 38 с заданным уровнем THPRE тяги (см. фиг. 6А). Способ 1000 может включать в себя этап определения того, загружены ли полностью реактивные колеса (этап 1006). В некоторых иллюстративных вариантах осуществления, контроллер 120 может определить, загружены ли полностью реактивные колеса, связанные с обслуживающим спутником 10 (т.е. достигли ли они своих заданных максимальных частот вращения). Когда контроллер 120 определяет, что реактивные колеса, связанные с обслуживающим спутником 10, загружены не полностью (этап 1006: Нет), способ 1000 может вернуться к этапу 1004 для продолжения включения двигателей 36 и 38 с заданным уровнем THPRE тяги. Однако, когда контроллер 120 определяет, что реактивные колеса, связанные с обслуживающим спутником 10, загружены полностью (этап 1006: Да), способ 1000 может приступить к этапу 1008.
[0128] Этап 1008 способа 1000 может включать в себя этап определения длительности Δt1 включения для полной загрузки реактивных колес. В некоторых иллюстративных вариантах осуществления, контроллер 120 может прекратить включение двигателей 36 и 38 и определить длительность Δt1, требуемую для полной загрузки реактивных колес, связанных с обслуживающим спутником 10, в результате включения двигателей 36 и 38 с заданным уровнем THPRE тяги.
[0129] Способ 1000 может включать в себя этап включения второй пары двигателей с заданным уровнем тяги (этап 1010). Например, когда двигатели 40 и 42 находятся в положении Р5, контроллер 120 может включать двигатели 40 и 42 с заданным уровнем THPRE тяги (см. фиг. 6В). Способ 1000 может включать в себя этап определения того, разгружены ли полностью реактивные колеса (этап 1012). В некоторых иллюстративных вариантах осуществления, контроллер 120 может определить, разгружены ли полностью реактивные колеса, связанные с обслуживающим спутником 10 (т.е. достигли ли они своих заданных минимальных частот вращения). Когда контроллер 120 определяет, что реактивные колеса, связанные с обслуживающим спутником 10, разгружены не полностью (этап 1012: Нет), способ 1000 может вернуться к этапу 1010 для продолжения включения двигателей 40 и 42 с заданным уровнем THPRE тяги. Однако когда контроллер 120 определяет, что реактивные колеса, связанные с обслуживающим спутником 10, разгружены полностью (этап 1012: Да), способ 1000 может приступить к этапу 1014.
[0130] Этап 1014 способа 1000 может включать в себя этап определения длительности Δt2 включения для полной разгрузки реактивных колес. В некоторых иллюстративных вариантах осуществления, контроллер 120 может прекратить включение двигателей 40 и 42 и определить длительность Δt2, требуемую для полной разгрузки реактивных колес, связанных с обслуживающим спутником 10, в результате включения двигателей 40 и 42 с заданным уровнем THPRE тяги.
[0131] Способ 1000 может включать в себя этап включения двигателей с заданным уровнем THPRE тяги в течение первого промежутка Δt1 времени, при ориентации в положение Р4 (этап 1016). В одном иллюстративном варианте осуществления, контроллер 120 может включать любой из двигателей 36, 38, 40, 42 с заданным уровнем THPRE тяги в течение первого промежутка Δt1 времени, когда любые из двигателей 36, 38, 40, 42 ориентированы в положение Р4.
[0132] Способ 1000 может также включать в себя этап включения двигателей с заданным уровнем THPRE тяги в течение второго промежутка Δt2 времени, при ориентации в положение Р5 (этап 1018). В одном иллюстративном варианте осуществления, контроллер 120 может включать любой из двигателей 36, 38, 40, 42 с заданным уровнем THPRE тяги в течение второго промежутка Δt2 времени, когда любые из двигателей 36, 38, 40, 42 ориентированы в положение Р5.
[0133] Таким образом, например, в некоторых вариантах осуществления, контроллер 120 может ориентировать первую пару двигателей 36 и 38 в положение Р4 и включать двигатели 36 и 38 с заданным уровнем THPRE тяги в течение первого промежутка Δt1 времени. Контроллер 120 может также ориентировать вторую пару двигателей 40 и 42 в положение Р5 и включать двигатели 40 и 42 с заданным уровнем THPRE тяги в течение второго промежутка Δt2 времени. По прошествии приблизительно 12 часов, контроллер 120 может ориентировать первую пару двигателей 36 и 38 в положение Р5 и включать двигатели 36 и 38 с заданным уровнем THPRE тяги в течение второго промежутка Δt2 времени. Дополнительно, контроллер 120 может ориентировать вторую пару двигателей 40 и 42 в положение Р4 и включать двигатели 40 и 42 с заданным уровнем THPRE тяги в течение первого промежутка Δt1 времени. Контроллер 120 может повторить эти этапы по прошествии заданного периода времени, чтобы помочь обеспечить то, чтобы основной спутник оставался в своей выделенной геостационарной области.
[0134] В то время как приведенное выше раскрытие описывает этапы 1002-1018 в отношении первой пары двигателей 36, 38 и второй пары двигателей 40, 42, ни способ 1000, ни настоящее раскрытие в своем самом широком смысле не ограничены этой конфигурацией. Например, в некоторых вариантах осуществления согласно настоящему раскрытию, контроллер может выбрать двигатели 36 и 40 в качестве первой пары двигателей, и двигатели 38 и 40 в качестве второй пары двигателей, для выполнения этапов 1002-1018 способа.
[0135] Некоторые из раскрытых вариантов осуществления, в зависимости от реализации, могут обеспечить некоторые преимущества над общепринятыми способами поддержания положения. Например, в вариантах осуществления настоящего раскрытия, нет необходимости определять точное местоположение совместного центра масс соединенного блока, включающего в себя обслуживающий спутник и основной спутник. Вместо этого, положения P2, P3, P4, и P5 двигателей, соответствующие угловым смещениям Θ2, Θ3, Θ4, Θ5, соответственно, могут быть заданы и могут быть одними и теми же независимо от размера и/или массы основного спутника. Конкретно, положения P2, P3, P4, и P5 двигателей могут быть выбраны таким образом, чтобы векторы тяги любых двигателей основного спутника не проходили через никакие из совместных центров масс соединенных блоков, включающих в себя обслуживающий спутник и множество основных спутников, с которыми обслуживающий спутник может стыковаться в космосе. Вместо этого, векторы тяги двигателей, ориентированных в любое из положений P2, P3, P4, и P5 двигателей, могут быть смещены (т.е. могут находиться на расстоянии) от всех совместных центров масс множества соединенных блоков.
[0136] Раскрытые варианты осуществления могут быть также основаны на признании того, что может быть трудным точно определить совместный центр масс соединенного блока. Например, поскольку топливо, находящееся в обслуживающем спутнике или основном спутнике, расходуется, совместный центр масс может изменяться. Дополнительно, ошибки в определении точного распределения масс обслуживающего спутника и основного спутника могут приводить к ошибкам в определении совместного центра масс. Раскрытый обслуживающий спутник может предпочтительно обеспечить услуги по поддержанию положения, не полагаясь на совместный центр масс обслуживающего спутника и основного спутника.
[0137] Раскрытый обслуживающий спутник может обеспечить услуги по поддержанию положения посредством способа переменной тяги (например, способа 900 фиг. 9) или способа переменного времени (например, способа 1000 фиг. 10). Как подробно описано в приведенном выше раскрытии, в способе переменной тяги, обслуживающий спутник может позиционировать пару двигателей на одной стороне (северной, южной, западной или восточной) в положениях Р2 и Р3, соответственно. Выбранные двигатели могут быть включены с первым уровнем TH1 тяги. Могут быть определены крутящие моменты и/или моменты импульса, генерируемые в результате этих включений двигателей относительно по меньшей мере одной оси соединенного блока. Обслуживающий спутник может затем перепозиционировать двигатели таким образом, чтобы двигатель, ранее позиционированный в положении Р2, переместился в положение Р3, и наоборот. Переориентированные двигатели могут быть включены со вторым уровнем TH2 тяги, который может быть выбран таким образом, чтобы крутящие моменты и/или моменты импульса, генерируемые относительно упомянутой по меньшей мере одной оси, могли быть по существу скомпенсированы или обнулены.
[0138] Обслуживающий спутник может затем позиционировать пару двигателей на одной стороне (северной, южной, западной или восточной) в положениях Р2 и Р3, соответственно. Обслуживающий спутник может включить выбранные двигатели с уровнем TH1 тяги, изменить положения двигателей и включить двигатели с уровнем TH2 тяги, и повторить процесс для обеспечения требуемого поступательного перемещения для соединенного блока при обеспечении обнуления любых остаточных крутящих моментов. Обслуживающий спутник может повторять эту процедуру с двигателями на противоположной стороне каждые 12 часов. Таким образом, обслуживающий спутник может предпочтительно обеспечить услуги по поддержанию положения для основного спутника без определения совместного центра масс обслуживающего спутника и основного спутника, и без включения двигателей в направлении совместного центра масс.
[0139] Как подробно описано в приведенном выше раскрытии, в способе переменного времени, обслуживающий спутник может позиционировать оба двигателя первой пары двигателей на одной стороне (северной, южной, западной или восточной), например, в положение Р4. Обслуживающий спутник может позиционировать вторую пару двигателей, отличную от первой пары двигателей, например, в положение Р5. Вторая пара двигателей может быть расположена на противоположной стороне относительно первой пары двигателей. Оба двигателя первой пары двигателей могут быть включены с заданным уровнем THPRE тяги в течение первого промежутка T1 времени до тех пор, пока одно или несколько реактивных колес обслуживающего спутника или основного спутника не будут полностью загружены. По истечении первого промежутка T1 времени, включение первой пары двигателей может быть прекращено. Обслуживающий спутник может затем включить вторую пару двигателей с заданным уровнем THPRE тяги. Обслуживающий спутник может определить второй промежуток T2 времени, требуемый для разгрузки одного или нескольких реактивных колес. Следует отметить, что ни векторы тяги первой пары двигателей, ни векторы тяги второй пары двигателей не проходят через совместный центр масс обслуживающего спутника и основного спутника.
[0140] Обслуживающий спутник может включать первую пару двигателей с уровнем THPRE тяги в течение первого промежутка T1 времени, и вторую пару двигателей с уровнем THPRE тяги в течение второго промежутка T2 времени. По прошествии приблизительно 12 часов, обслуживающий спутник может изменить положения первой и второй пар двигателей. А именно, первая пара двигателей, ранее ориентированная в положение Р4, может быть переориентирована таким образом, чтобы первая пара двигателей находилась в положении Р5. Подобным образом, вторая пара двигателей, ранее ориентированная в положение Р5, может быть переориентирована таким образом, чтобы вторая пара двигателей находилась в положении Р4. Обслуживающий спутник может затем включать первую пару двигателей с уровнем THPRE тяги в течение второго промежутка T2 времени, и первую пару двигателей с уровнем THPRE тяги в течение первого промежутка T1 времени. Обслуживающий спутник может повторить эту процедуру по прошествии заданного периода времени. Таким образом, обслуживающий спутник может обеспечить услуги по поддержанию положения для основного спутника без определения совместного центра масс обслуживающего спутника и основного спутника, и без включения двигателей в направлении совместного центра масс.
[0141] Различные изменения и модификации могут быть реализованы для раскрытых иллюстративных вариантов осуществления, не выходя за рамки сущности и объема настоящего раскрытия, указанных в нижеследующей формуле изобретения. Предполагается, что описание изобретения и примеры должны рассматриваться только как иллюстративные, причем истинный объем и сущность настоящего изобретения указаны нижеследующей формулой изобретения.
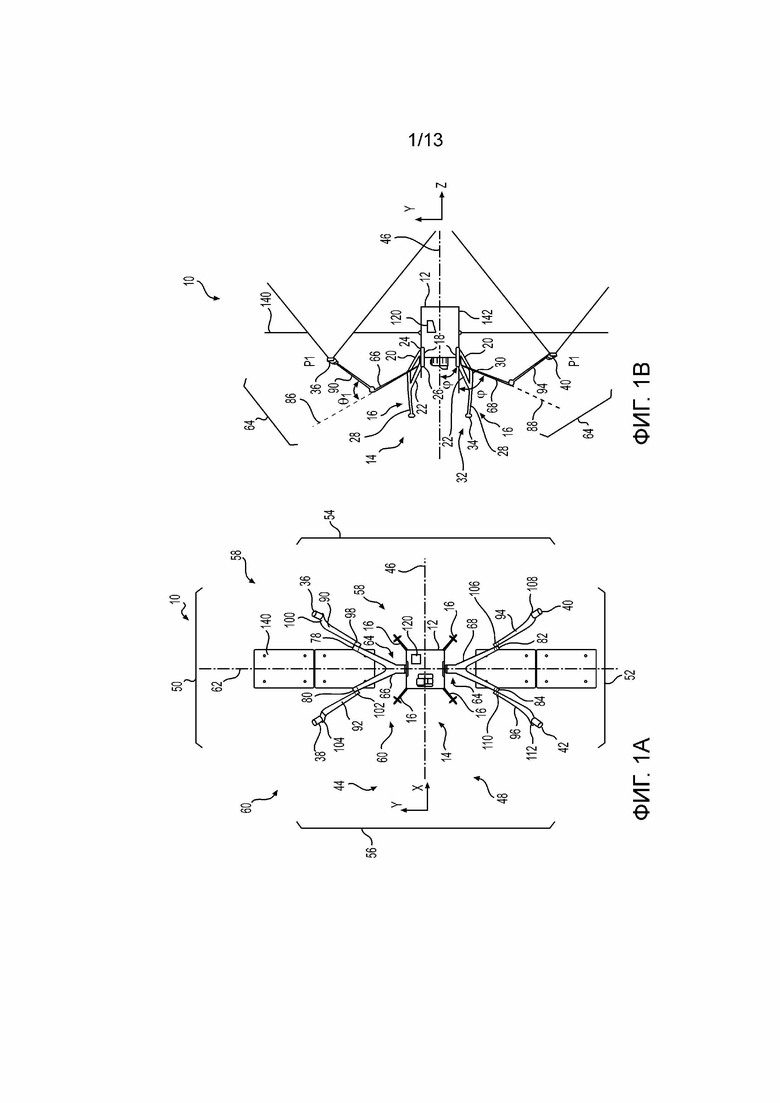
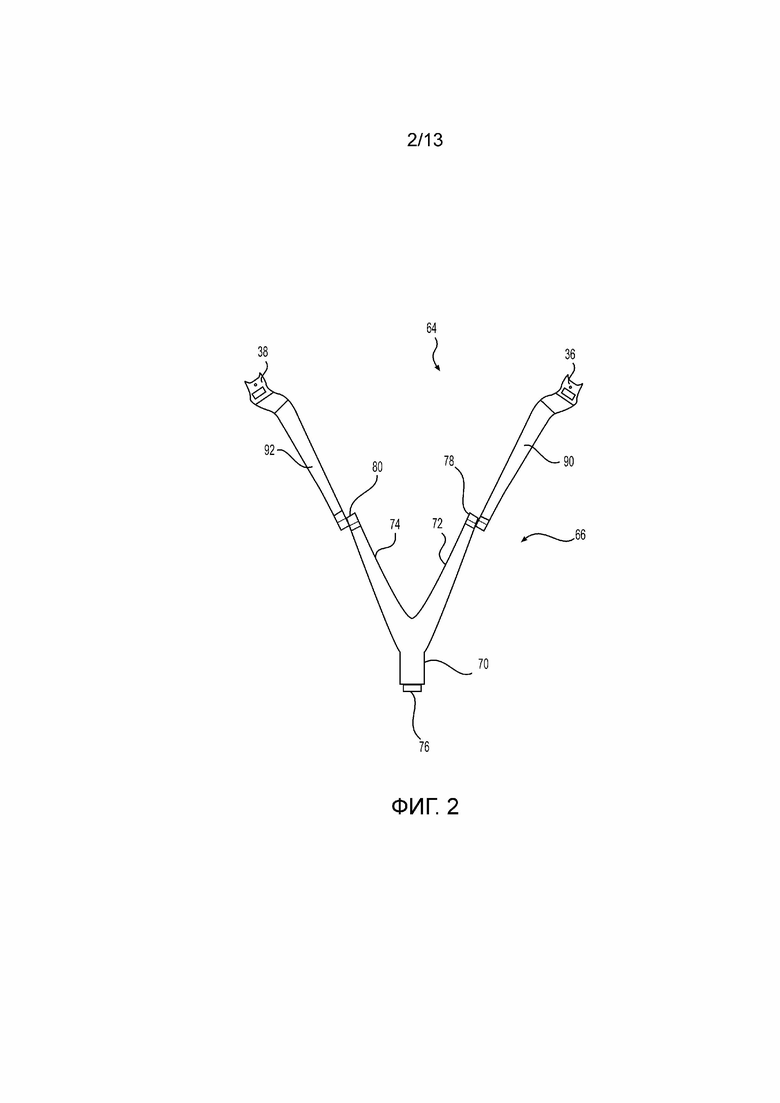
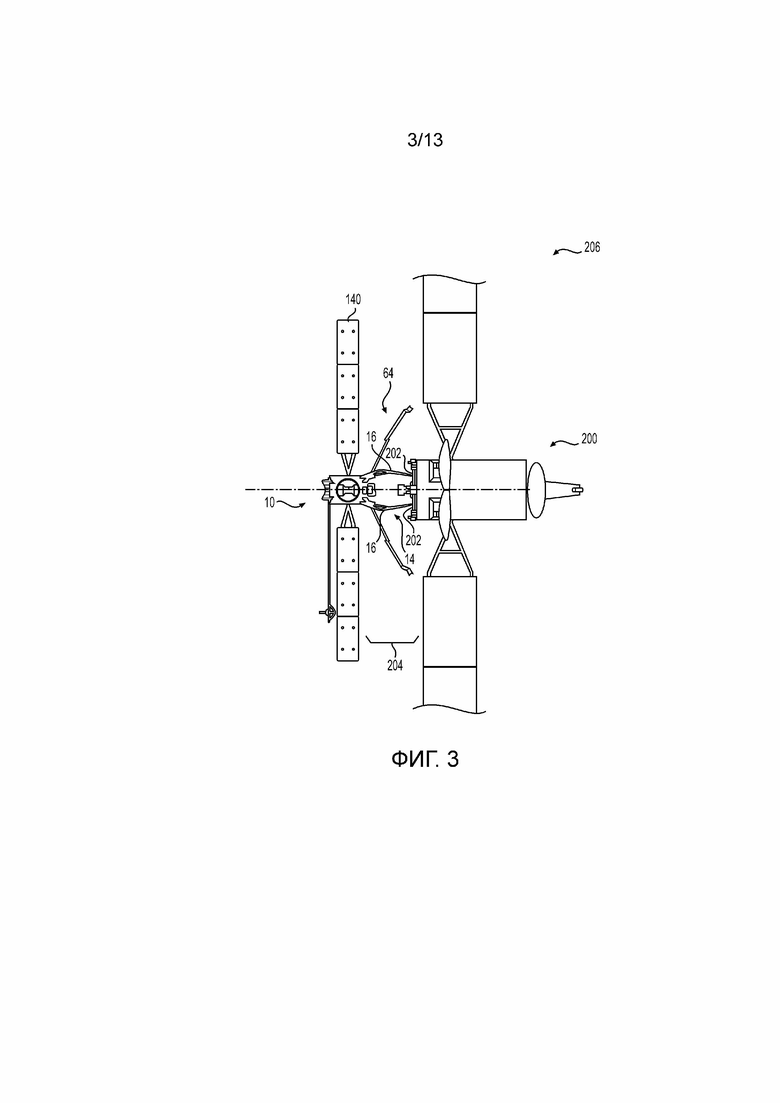
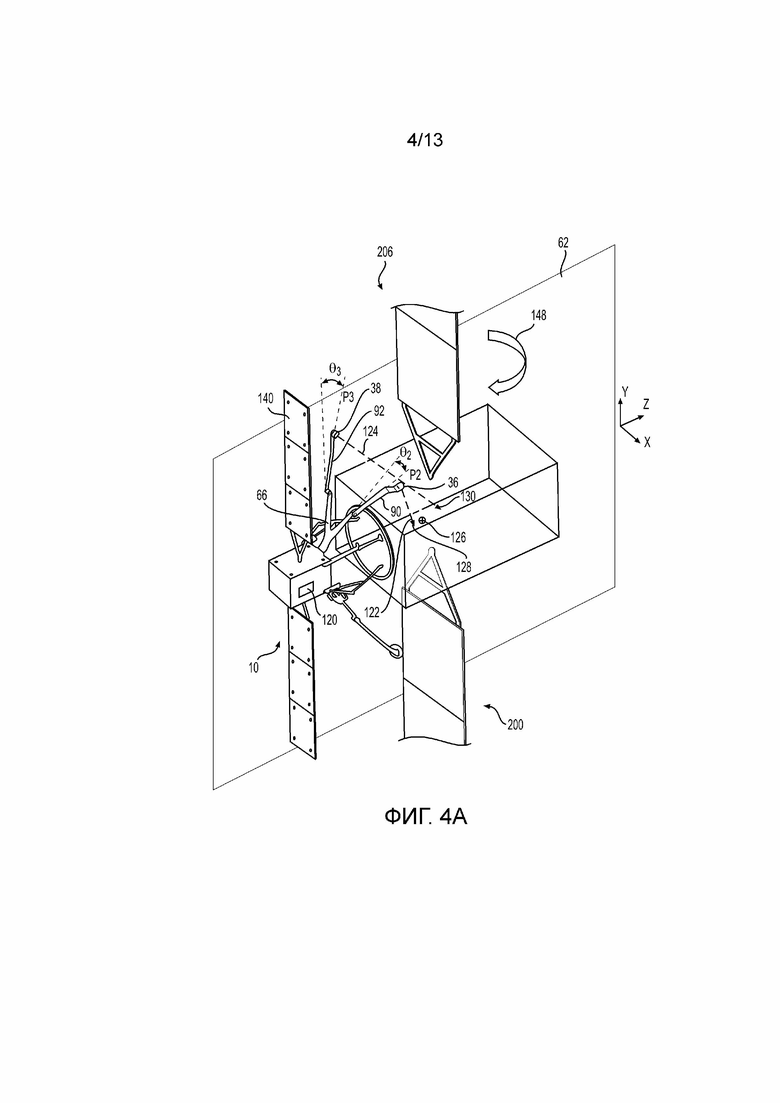
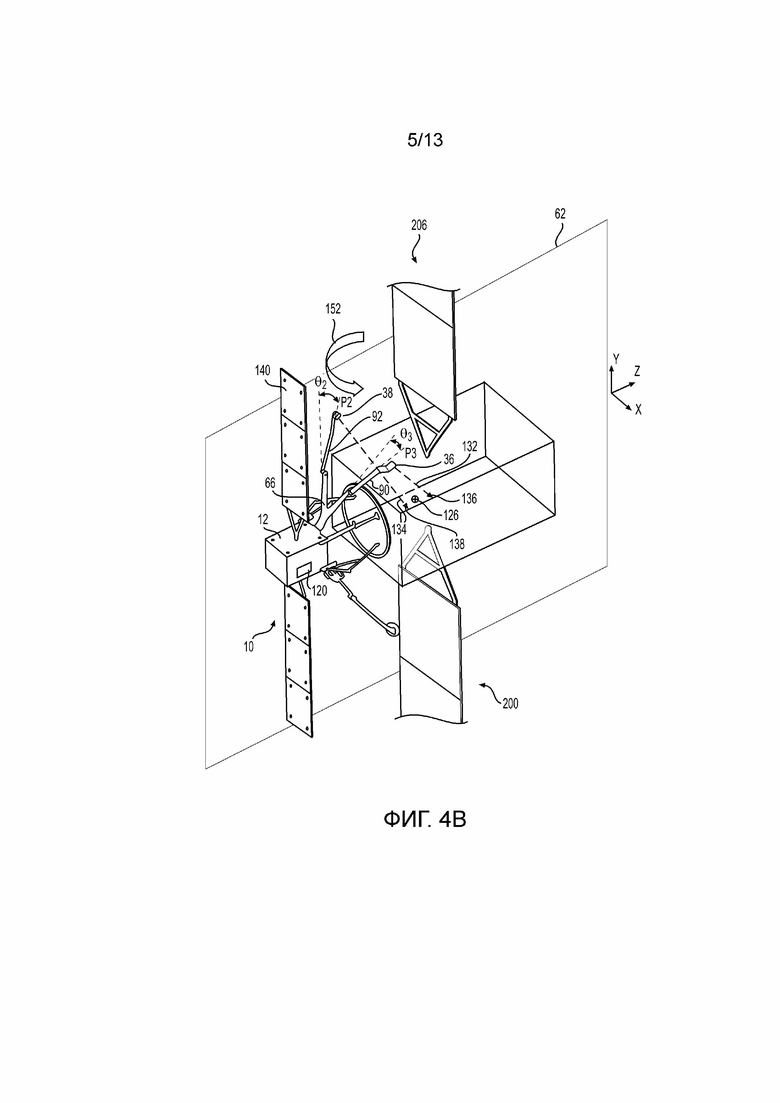
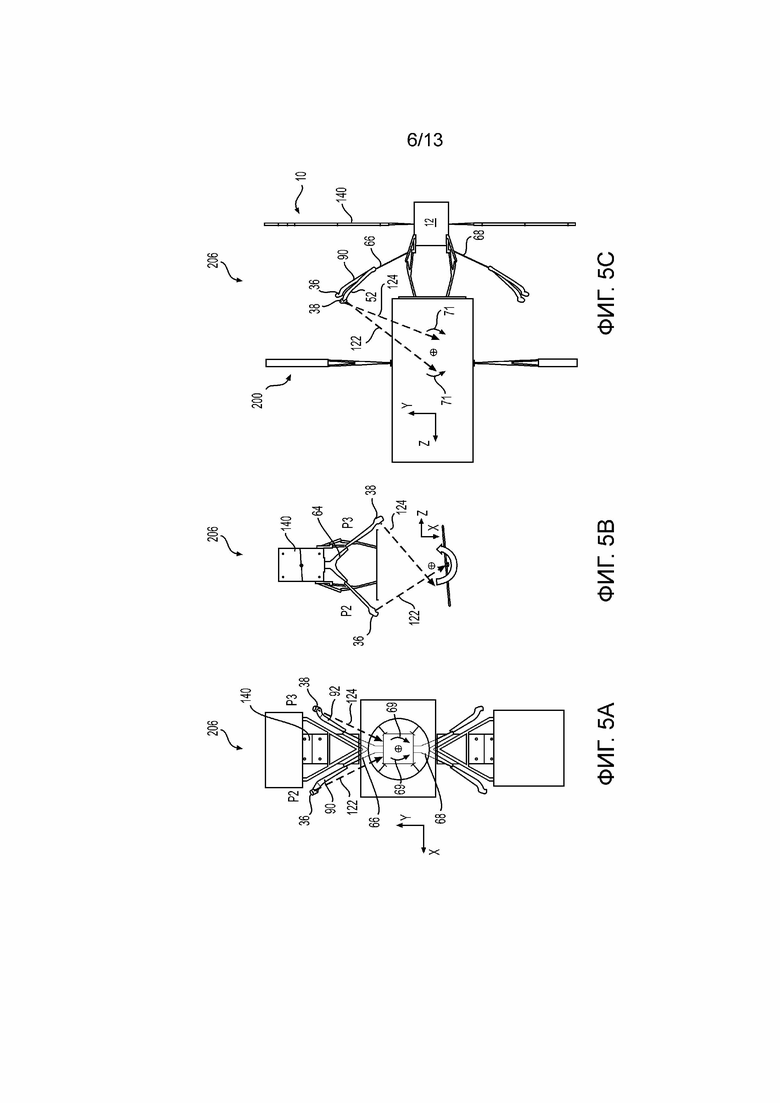
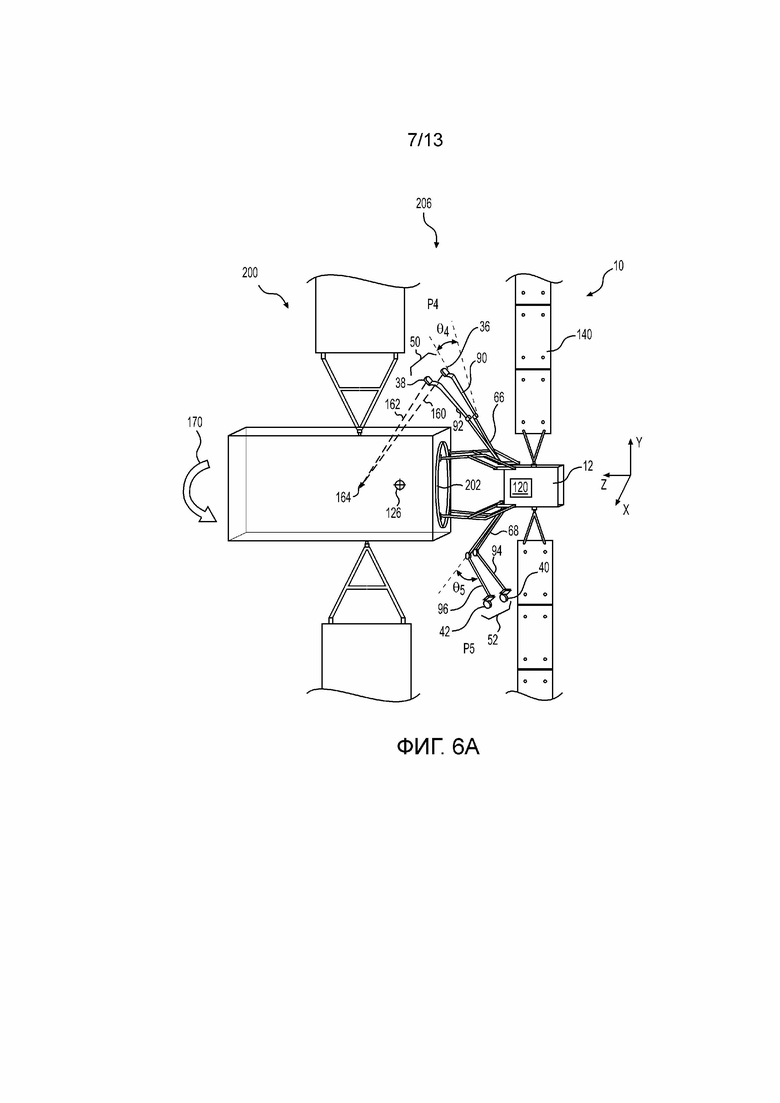
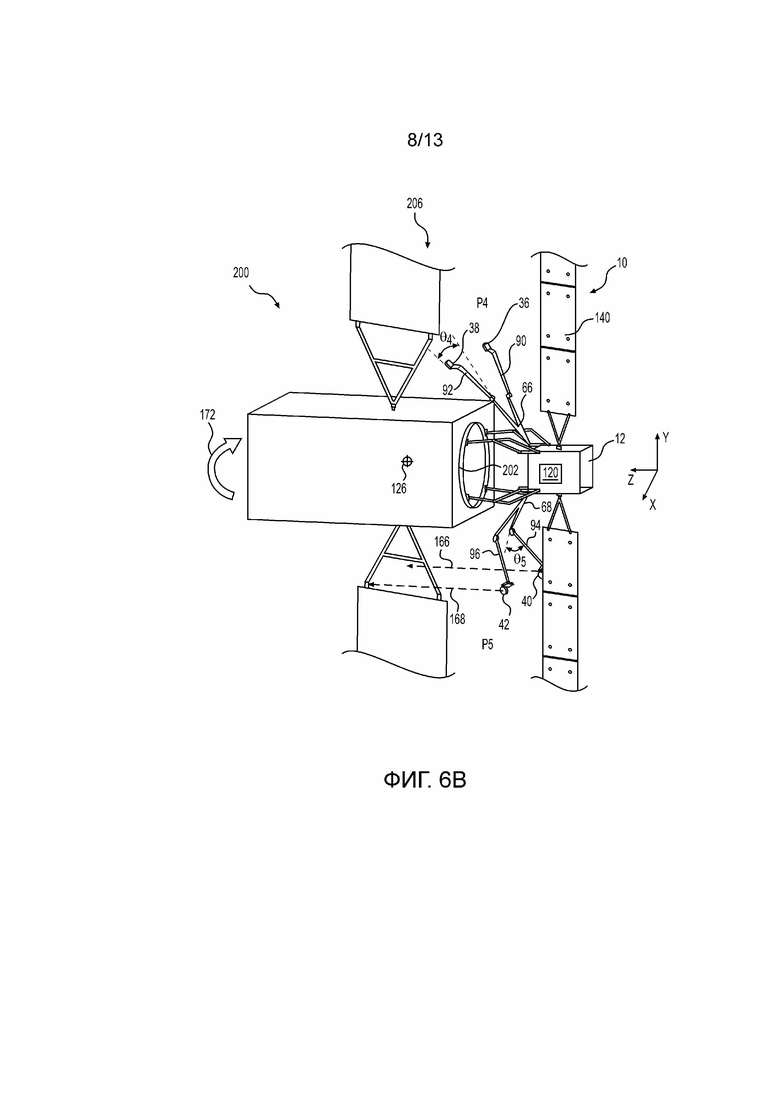
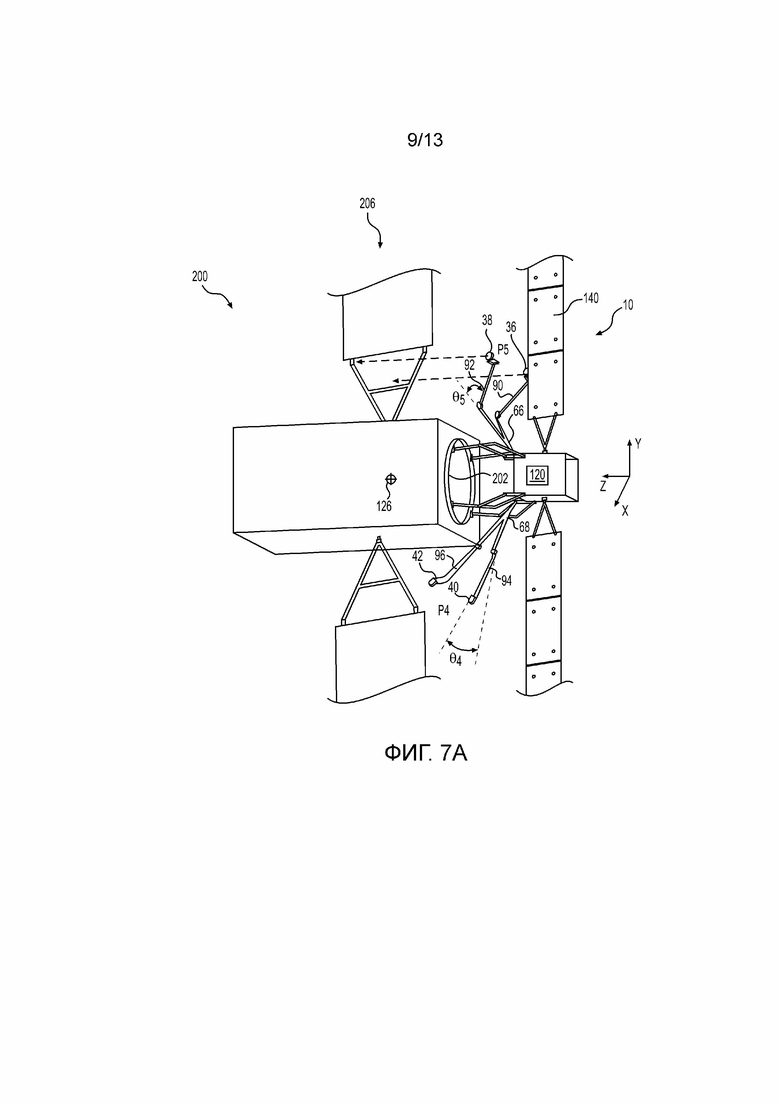
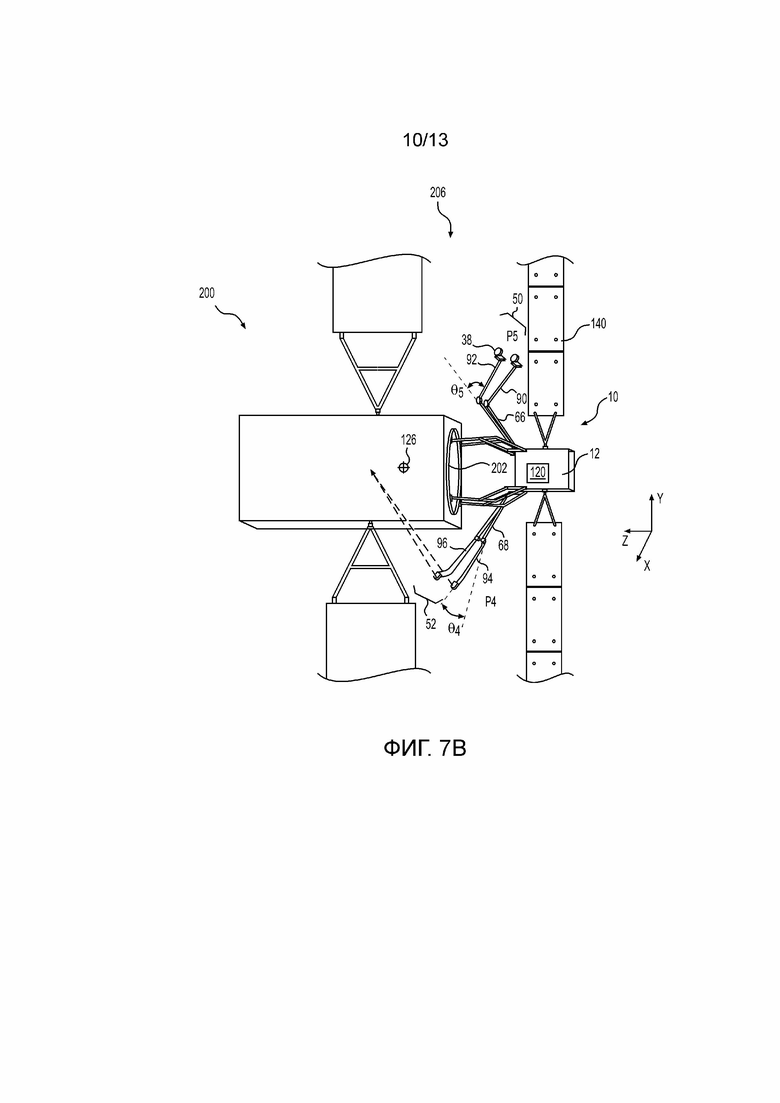
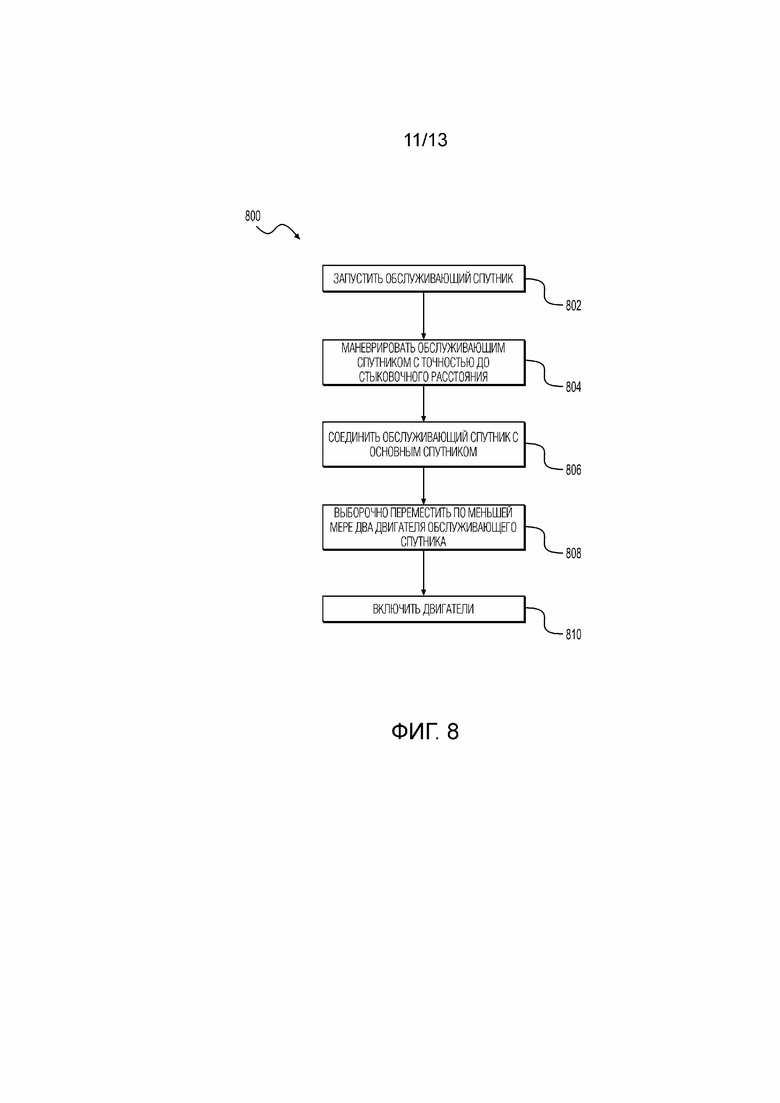
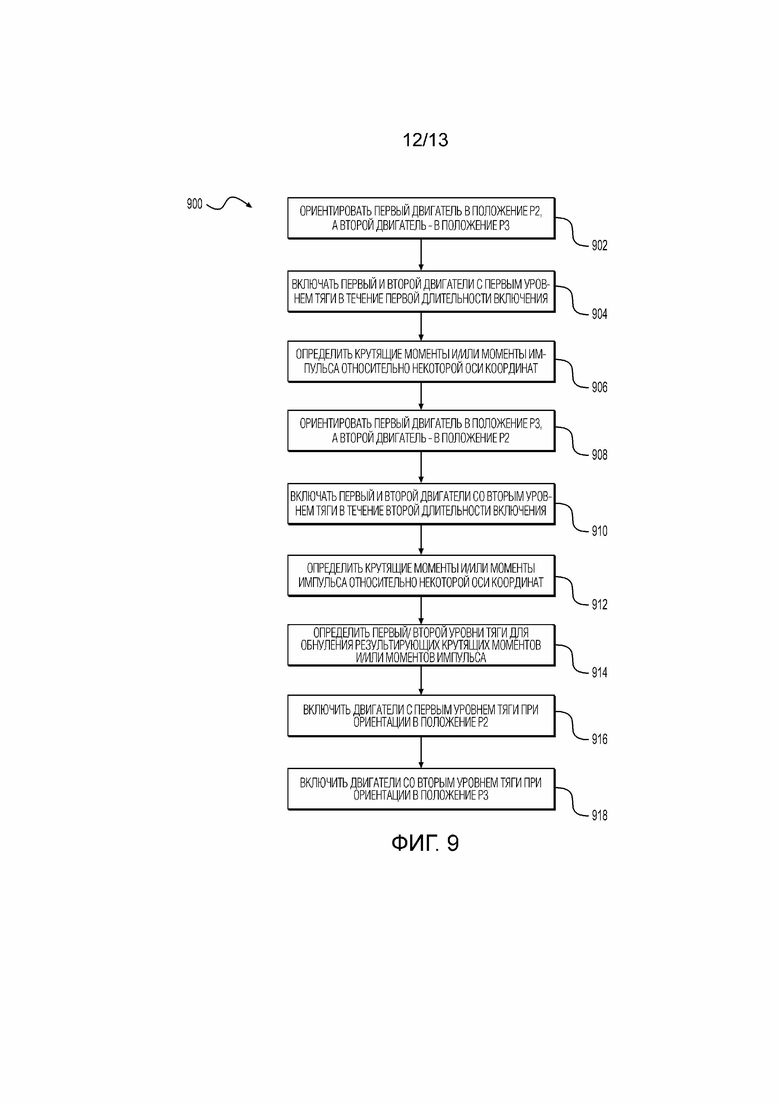
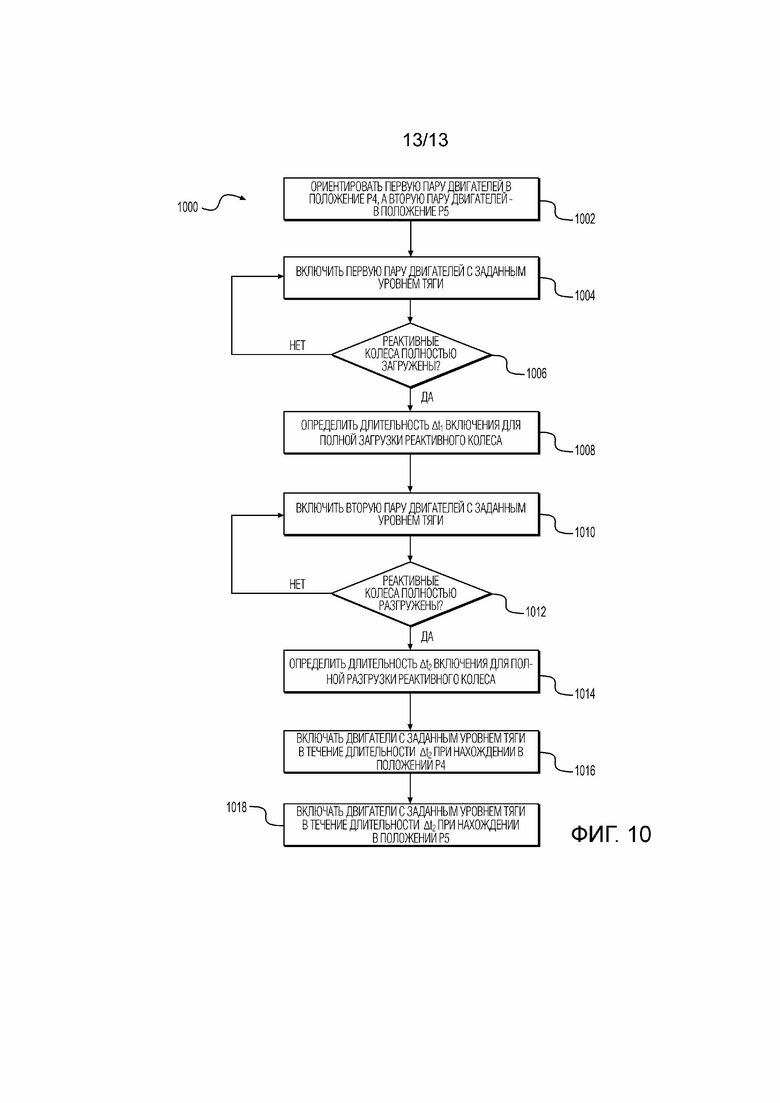
Группа изобретений относится к космической технике. Обслуживающий спутник для обеспечения услуг по поддержанию положения для основного спутника. Обслуживающий спутник может иметь тело и захватывающий механизм, прикрепленный к телу. Захватывающий механизм может быть выполнен с возможностью прикрепления к стыковочному кольцу, продолжающемуся от внешней поверхности основного спутника, для образования соединения между основным спутником и обслуживающим спутником через продолжающееся наружу стыковочное кольцо. Прикрепление захватывающего механизма к стыковочному кольцу может образовывать соединенный блок, имеющий совместный центр масс. Обслуживающий спутник может иметь два двигателя и контроллер. Упомянутый контроллер может поддерживать соединенный блок на по существу стационарной орбите посредством выборочного ориентирования упомянутых двух двигателей таким образом, чтобы векторы тяги упомянутых двух двигателей не проходили через совместный центр масс, и каждый из них был смещен от совместного центра масс. Обеспечивается поддержание положения для основного спутника без определения совместного центра масс обслуживающего спутника и основного спутника. 5 н. и 15 з.п. ф-лы, 16 ил.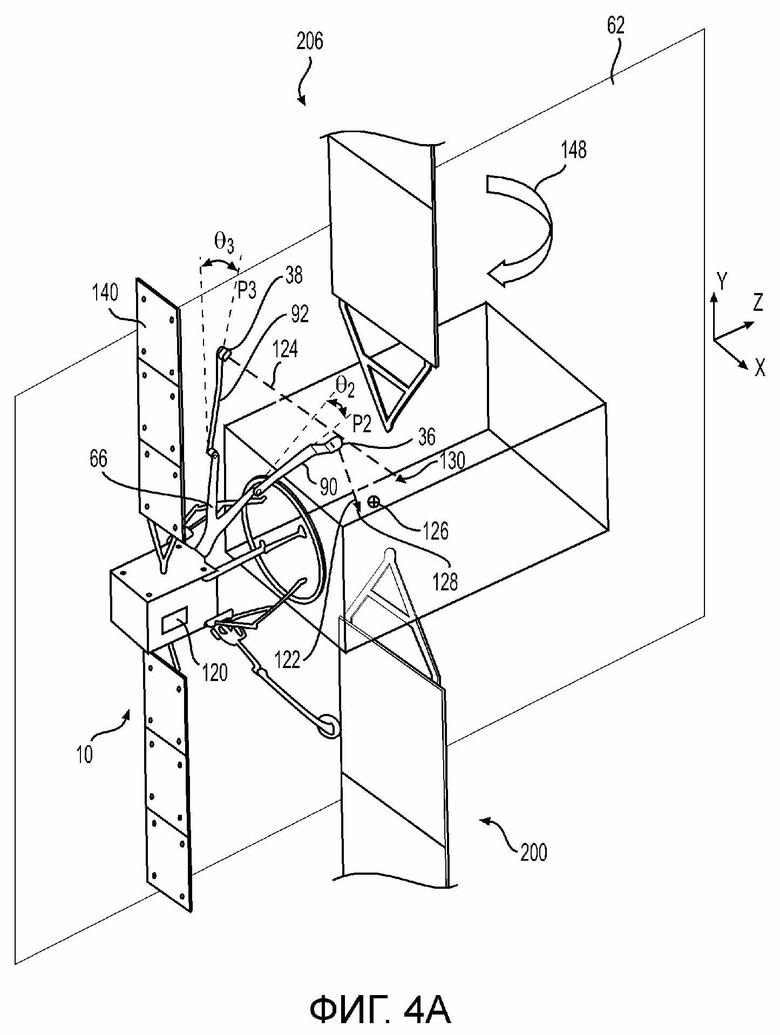
1. Поддерживающий положение обслуживающий спутник, содержащий
тело;
захватывающий механизм, прикрепленный к телу и выполненный с возможностью прикрепления к основному спутнику для образования соединенного блока, содержащего основной спутник и обслуживающий спутник и имеющего совместный центр масс;
первый развертываемый удлинитель, содержащий первый рычаг вилки, соединенный с возможностью вращения с каждым из первого рычага двигателя и второго рычага двигателя, причем проксимальный конец первого рычага вилки соединен с возможностью вращения с упомянутым телом, дистальный конец первого рычага двигателя неподвижно прикреплен к первому двигателю, а дистальный конец второго рычага двигателя неподвижно прикреплен ко второму двигателю, причем первый двигатель выполнен с возможностью создания вектора тяги первого двигателя, направленного вдоль оси тяги первого двигателя и направленного к телу основного спутника, а второй двигатель выполнен с возможностью создания вектора тяги второго двигателя, направленного вдоль оси тяги второго двигателя и направленного к телу основного спутника;
второй развертываемый удлинитель, содержащий второй рычаг вилки, соединенный с возможностью вращения с каждым из третьего рычага двигателя и четвертого рычага двигателя, причем проксимальный конец второго рычага вилки соединен с возможностью вращения с упомянутым телом, дистальный конец третьего рычага двигателя неподвижно прикреплен к третьему двигателю, а дистальный конец четвертого рычага двигателя неподвижно прикреплен к четвертому двигателю, причем третий двигатель выполнен с возможностью создания вектора тяги третьего двигателя, направленного вдоль оси тяги третьего двигателя и направленного к телу основного спутника, а четвертый двигатель выполнен с возможностью создания вектора тяги четвертого двигателя, направленного вдоль оси тяги четвертого двигателя и направленного к телу основного спутника;
контроллер, выполненный с возможностью включения первого двигателя в предварительно заданной первой ориентации и с возможностью включения второго двигателя в предварительно заданной второй ориентации; причем:
ось тяги первого двигателя пересекает ось тяги второго двигателя в точке пересечения векторов тяги, находящейся внутри тела основного спутника; и
соединенный блок поддерживается на по существу стационарной орбите посредством включения первого двигателя, второго двигателя, третьего двигателя и четвертого двигателя.
2. Обслуживающий спутник по п.1, дополнительно содержащий датчик для определения момента импульса или частоту вращения соединенного блока.
3. Обслуживающий спутник по п.2, в котором включение по меньшей мере одного из первого, второго, третьего и четвертого двигателей по существу уменьшает момент импульса или частоту вращения соединенного блока до примерно нуля.
4. Поддерживающий положение обслуживающий спутник, содержащий
тело;
захватывающий механизм, прикрепленный к телу и выполненный с возможностью прикрепления к основному спутнику для образования соединенного блока, содержащего основной спутник и обслуживающий спутник и имеющего совместный центр масс;
первый развертываемый удлинитель, содержащий первый рычаг вилки, соединенный с возможностью вращения с первым рычагом двигателя, причем проксимальный конец первого рычага вилки соединен с возможностью вращения с упомянутым телом, а дистальный конец первого рычага двигателя неподвижно прикреплен к первому двигателю, причем первый двигатель выполнен с возможностью создания вектора тяги первого двигателя, направленного вдоль оси тяги первого двигателя и направленного к телу основного спутника;
второй развертываемый удлинитель, содержащий второй рычаг вилки, соединенный с возможностью вращения со вторым рычагом двигателя, причем проксимальный конец второго рычага вилки соединен с возможностью вращения с упомянутым телом, а дистальный конец второго рычага двигателя неподвижно прикреплен ко второму двигателю, причем второй двигатель выполнен с возможностью создания вектора тяги второго двигателя, направленного вдоль оси тяги второго двигателя и направленного к телу основного спутника; и
контроллер, выполненный с возможностью включения первого двигателя в предварительно заданной первой ориентации и с возможностью включения второго двигателя в предварительно заданной второй ориентации; причем:
ось тяги первого двигателя пересекает ось тяги второго двигателя в точке пересечения векторов тяги, находящейся внутри тела основного спутника;
соединенный блок поддерживается на по существу стационарной орбите посредством включения первого двигателя и второго двигателя; и
первый двигатель и второй двигатель выполнены так, что вектор тяги первого двигателя и вектор тяги второго двигателя не проходят через упомянутый совместный центр масс и пересекаются с продольной плоскостью соединенного блока на противоположных сторонах совместного центра масс.
5. Обслуживающий спутник по п.1, в котором первый двигатель и второй двигатель выполнены так, что совместный центр масс находится между точками пересечения продольной плоскости соединенного блока и первого вектора тяги и второго вектора тяги.
6. Обслуживающий спутник по п.1, в котором
каждый из первого развертываемого удлинителя и второго развертываемого удлинителя выполнены с возможностью функционирования в неразвернутой конфигурации до прикрепления захватывающего механизма к основному спутнику; и
каждый из первого развертываемого удлинителя и второго развертываемого удлинителя выполнены с возможностью функционирования в развернутой конфигурации после прикрепления захватывающего механизма к основному двигателю.
7. Обслуживающий спутник по п.1, в котором по меньшей мере два из первого, второго, третьего и четвертого двигателей выполнены с возможностью одновременного включения.
8. Обслуживающий спутник по п.1, в котором
первый двигатель и второй двигатель находятся на расстоянии друг от друга и позиционированы в различных предварительно заданных ориентациях; и
третий двигатель и четвертый двигатель находятся на расстоянии друг от друга и позиционированы в различных предварительно заданных ориентациях.
9. Обслуживающий спутник по п.1, в котором
первый двигатель и второй двигатель размещены на первой стороне обслуживающего спутника; и
третий двигатель и четвертый двигатель размещены на второй стороне обслуживающего спутника, которая противоположна первой стороне.
10. Поддерживающий положение обслуживающий спутник, содержащий
тело;
захватывающий механизм, прикрепленный к телу и выполненный с возможностью прикрепления к стыковочному кольцу, проходящему от внешней поверхности основного спутника, для образования соединенного блока, содержащего основной спутник и обслуживающий спутник и имеющего совместный центр масс;
первый развертываемый удлинитель, содержащий первый рычаг вилки, первый рычаг двигателя и второй рычаг двигателя, причем первый рычаг вилки прикреплен с возможностью вращения к обслуживающему спутнику на первом конце и соединен с возможностью вращения с каждым из первого рычага двигателя и второго рычага двигателя, причем дистальный конец первого рычага двигателя неподвижно прикреплен к первому двигателю, а дистальный конец второго рычага двигателя неподвижно прикреплен ко второму двигателю, причем первый двигатель выполнен с возможностью создания вектора тяги первого двигателя, направленного вдоль оси тяги первого двигателя и направленного к телу основного спутника, а второй двигатель выполнен с возможностью создания вектора тяги второго двигателя, направленного вдоль оси тяги второго двигателя и направленного к телу основного спутника;
второй развертываемый удлинитель, содержащий второй рычаг вилки, третий рычаг двигателя и четвертый рычаг двигателя, причем второй рычаг вилки прикреплен с возможностью вращения к обслуживающему спутнику на первом конце и соединен с возможностью вращения с каждым из третьего рычага двигателя и четвертого рычага двигателя, причем дистальный конец третьего рычага двигателя неподвижно прикреплен к третьему двигателю, а дистальный конец четвертого рычага двигателя неподвижно прикреплен к четвертому двигателю, причем третий двигатель выполнен с возможностью создания вектора тяги третьего двигателя, направленного вдоль оси тяги третьего двигателя, а четвертый двигатель выполнен с возможностью создания вектора тяги четвертого двигателя, направленного вдоль оси тяги четвертого двигателя;
контроллер, выполненный с возможностью включения первого двигателя в предварительно заданной первой ориентации из набора предварительно заданных первых ориентаций и с возможностью включения второго двигателя в предварительно заданной второй ориентации из набора предварительно заданных вторых ориентаций; причем:
ось тяги первого двигателя пересекает ось тяги второго двигателя в точке пересечения векторов тяги, находящейся внутри тела основного спутника;
первый двигатель представляет собой первый северный двигатель, а второй двигатель представляет собой второй северный двигатель, причем каждый размещен на первой стороне обслуживающего спутника; и
третий двигатель представляет собой первый южный двигатель, а четвертый двигатель представляет собой второй южный двигатель, причем каждый размещен на второй стороне обслуживающего спутника, противоположной упомянутой первой стороне; и
соединенный блок поддерживается на по существу стационарной орбите посредством функционирования по меньшей мере одного из первого двигателя, второго двигателя, третьего двигателя и четвертого двигателя.
11. Поддерживающий положение обслуживающий спутник, содержащий
тело;
захватывающий механизм, прикрепленный к телу и выполненный с возможностью прикрепления к стыковочному кольцу, проходящему от внешней поверхности основного спутника, для образования соединенного блока, содержащего основной спутник и обслуживающий спутник и имеющего совместный центр масс;
первый развертываемый удлинитель, содержащий первый рычаг вилки и первый рычаг двигателя, причем первый рычаг вилки прикреплен с возможностью вращения к обслуживающему спутнику на первом конце и соединен на втором конце с возможностью вращения с первым концом первого рычага двигателя, причем второй конец первого рычага двигателя неподвижно прикреплен к первому двигателю, причем первый двигатель выполнен с возможностью создания вектора тяги первого двигателя, направленного вдоль оси тяги первого двигателя и направленного к телу основного спутника;
второй развертываемый удлинитель, содержащий второй рычаг вилки и второй рычаг двигателя, причем второй рычаг вилки прикреплен с возможностью вращения к обслуживающему спутнику на первом конце и соединен на втором конце с возможностью вращения с первым концом второго рычага двигателя, причем второй конец второго рычага двигателя неподвижно прикреплен ко второму двигателю, причем второй двигатель выполнен с возможностью создания вектора тяги второго двигателя, направленного вдоль оси тяги второго двигателя и направленного к телу основного спутника;
контроллер, выполненный с возможностью включения первого двигателя в предварительно заданной первой ориентации из набора предварительно заданных первых ориентаций и с возможностью включения второго двигателя в предварительно заданной второй ориентации из набора предварительно заданных вторых ориентаций; причем:
ось тяги первого двигателя пересекает ось тяги второго двигателя в точке пересечения векторов тяги;
первый двигатель представляет собой пару первых двигателей, содержащую первый северный двигатель и второй северный двигатель, причем эта пара первых двигателей размещена на первой стороне обслуживающего спутника; и
второй двигатель представляет собой пару вторых двигателей, содержащую первый южный двигатель и второй южный двигатель, причем эта пара вторых двигателей размещена на второй стороне обслуживающего спутника, противоположной упомянутой первой стороне; и
соединенный блок поддерживается на по существу стационарной орбите посредством функционирования первого двигателя и второго двигателя;
первый двигатель и второй двигатель выполнены так, что вектор тяги первого двигателя и вектор тяги второго двигателя не проходят через упомянутый совместный центр масс и пересекаются с продольной плоскостью соединенного блока на противоположных сторонах совместного центра масс.
12. Обслуживающий спутник по п.10, в котором первый двигатель и второй двигатель выполнены так, что совместный центр масс находится между точками пересечения продольной плоскости соединенного блока и векторов тяги от каждого из первого двигателя и второго двигателя.
13. Обслуживающий спутник по п.10, в котором
каждый из первого развертываемого удлинителя и второго развертываемого удлинителя выполнены для функционирования в неразвернутой конфигурации до того, как захватывающий механизм прикрепится к стыковочному кольцу; и
каждый из первого развертываемого удлинителя и второго развертываемого удлинителя выполнены для функционирования в развернутой конфигурации после прикрепления захватывающего механизма к стыковочному кольцу.
14. Обслуживающий спутник по п.10, в котором по меньшей мере два из первого, второго, третьего и четвертого двигателей выполнены с возможностью одновременного включения.
15. Обслуживающий спутник по п.10, в котором
первый двигатель и второй двигатель находятся на расстоянии друг от друга и позиционированы в различных предварительно заданных ориентациях; и
третий двигатель и четвертый двигатель находятся на расстоянии друг от друга и позиционированы в различных предварительно заданных ориентациях.
16. Поддерживающий положение обслуживающий спутник, содержащий
тело;
захватывающий механизм, прикрепленный к телу и выполненный с возможностью прикрепления к внешней поверхности основного спутника для образования соединенного блока, содержащего основной спутник и обслуживающий спутник и имеющего совместный центр масс;
первый развертываемый удлинитель, содержащий первый рычаг вилки, первый рычаг двигателя и второй рычаг двигателя, причем первый рычаг вилки прикреплен к обслуживающему спутнику на первом конце и соединен с возможностью вращения с первым концом первого рычага двигателя и соединен с возможностью вращения с первым концом второго рычага двигателя, причем второй конец первого рычага двигателя прикреплен к первому двигателю, а второй конец второго рычага двигателя прикреплен ко второму двигателю, причем первый двигатель выполнен с возможностью создания вектора тяги первого двигателя, направленного вдоль оси тяги первого двигателя и направленного к телу основного спутника, а второй двигатель выполнен с возможностью создания вектора тяги второго двигателя, направленного вдоль оси тяги второго двигателя и направленного к телу основного спутника;
второй развертываемый удлинитель, содержащий второй рычаг вилки, третий рычаг двигателя и четвертый рычаг двигателя, причем второй рычаг вилки прикреплен к обслуживающему спутнику на первом конце и соединен с возможностью вращения с первым концом третьего рычага двигателя и соединен с возможностью вращения с первым концом четвертого рычага двигателя, причем второй конец третьего рычага двигателя прикреплен к третьему двигателю, причем третий двигатель выполнен с возможностью создания вектора тяги третьего двигателя, направленного вдоль оси тяги третьего двигателя и направленного к телу основного спутника, а второй конец четвертого рычага двигателя прикреплен к четвертому двигателю, причем четвертый двигатель выполнен с возможностью создания вектора тяги четвертого двигателя, направленного вдоль оси тяги четвертого двигателя;
контроллер, выполненный с возможностью включения первого двигателя и второго двигателя так, чтобы ось тяги первого двигателя пересекала ось тяги второго двигателя в точке пересечения векторов тяги, причем точка пересечения векторов тяги находится внутри тела основного спутника; причем:
соединенный блок поддерживается на по существу стационарной орбите посредством функционирования по меньшей мере одного из первого двигателя, второго двигателя, третьего двигателя и четвертого двигателя.
17. Обслуживающий спутник по п.16, в котором котроллер дополнительно выполнен с возможностью включения первого двигателя в предварительно заданной первой ориентации из набора предварительно заданных первых ориентаций, и включения второго двигателя в предварительно заданной второй ориентации из набора предварительно заданных вторых ориентаций.
18. Обслуживающий спутник по п.16, в котором
каждый из первого развертываемого удлинителя и второго развертываемого удлинителя выполнены для функционирования в неразвернутой конфигурации до того, как захватывающий механизм прикрепится к основному спутнику; и
каждый из первого развертываемого удлинителя и второго развертываемого удлинителя выполнены для функционирования в развернутой конфигурации после прикрепления захватывающего механизма к основному спутнику.
19. Обслуживающий спутник по п.16, в котором
первый рычаг вилки прикреплен с возможностью вращения к обслуживающему спутнику на первом конце первого рычага вилки;
второй конец первого рычага двигателя неподвижно прикреплен к первому двигателю, а второй конец второго рычага двигателя неподвижно прикреплен ко второму двигателю;
второй рычаг вилки прикреплен с возможностью вращения к обслуживающему спутнику на первом конце второго рычага вилки;
второй конец третьего рычага двигателя неподвижно прикреплен к третьему двигателю, а второй конец четвертого рычага двигателя неподвижно прикреплен к четвертому двигателю.
20. Обслуживающий спутник по п.16, в котором
первый двигатель и второй двигатель расположены каждый на первой стороне обслуживающего спутника; и
третий двигатель и четвертый двигатель расположены каждый на второй стороне обслуживающего спутника, противоположной упомянутой первой стороне.
| Токарный резец | 1924 |
|
SU2016A1 |
| US 9522746 B1, 20.12.2016 | |||
| US 3948470 A, 06.04.1976 | |||
| 0 |
|
SU157142A1 | |

