Область техники
Изобретения относятся к средствам и методам обслуживания спутниковых систем различного назначения (мониторинга, навигации, связи и др.), преимущественно в эпоху достаточно развитой индустриализации ближнего космоса (околоземного и окололунного пространства).
При этом термин "обслуживание" здесь понимается в широком смысле, включая в себя не только ремонт, дозаправку, модернизацию оборудования, инспекцию и т.п., но и полную замену КО на новый (с возможной утилизацией первого).
Упомянутые выше средства и методы представлены, например, в монографии [1] B.C. Авдуевский, Г.Р. Успенский. Космическая индустрия. М. Маш. 1989, с. 48-61, 69-71.
Там описаны, наряду с традиционными системами и способами обслуживания различных космических объектов (КО): спутников, орбитальных станций, платформ и т.д., предусматривающими размещение на базовых орбитах (БО) необходимых средств обслуживания (СО) и их доставку к обслуживаемым КО, также и некоторые системы более отдаленной перспективы, такие как тросовые системы (ТС), позволяющие в значительной мере (иногда ~ на 100%) уменьшить затраты рабочего тела на орбитальное маневрирование (см. [1], с. 48-61).
В эпоху, к которой преимущественно относятся предлагаемые технические решения, следует ожидать высокого уровня развития космического производства (на околоземных орбитах, а также в начальной стадии - на поверхности Луны). Для космических средств этой эпохи будут характерны значительные модульность, унификация систем и узлов, многократность применения.
Предшествующий уровень техники
Обслуживаемые КО могут располагаться на самых разных орбитах: низких - с высотой ~ 1000 км (спутники сер. «Космос», орбитальные станции), средней высоты ~ 5000…20000 км (ГЛОНАСС/GPS), высокоэллиптических («Молния»), а также на экваториальной геостационарной орбите (ГСО) с высотой ≈ 35800 км, где наблюдается наибольшая активность в области развертывания и эксплуатации спутниковых систем различного назначения.
В настоящее время хорошо известно обслуживание КО с помощью сервисных космических аппаратов (КА), непосредственно выводимых с Земли, например, многоразовыми транспортными КΑ (ТКА) на низкие орбиты, а оттуда, при необходимости, с помощью межорбитальных транспортных аппаратов (МТА) - на более высокие орбиты обслуживаемых КО (см. патенты US 5242135 A, RU 2645179 С2, RU 2705028 С2 и др.).
С ростом числа обслуживаемых КО, высот их орбит и различия наклонений этих орбит -затраты энергии и/или времени на обслуживание резко увеличиваются. Особенно это сказывается при выведении СО с Земли (отчего страдает и экологическая ситуация). При увеличении населенности низких орбит пространство существенно засоряется мусором. Обслуживание КО на ГСО с поверхности Земли является особенно затратным.
Вместе с тем ясно, что если расположить базу СО не на Земле, а на орбите - как это имеет место в случае транспортно-технических центров (ТТЦ), описанных в [1], то затраты характеристической скорости на доставку СО с такой БО будут существ ниже, чем с Земли. Особенно - если БО и орбиты обслуживаемых КО достаточно высоки (при этом их отличия по высотам и наклонениям становится менее критичными).
Конечно, для снабжения БО с Земли требуются, вообще говоря, значительные затраты. Но, во-первых, пополнение ресурсов можно производить постепенно - в космосе с помощью ЭРД (оперативности здесь не требуется), а в перспективе - и из внеземных источников (с Луны, астероидов). В еще более продвинутом варианте, получение значительной части СО может быть осуществлено из отработавших КО - по образу «замкнутой экосистемы». Поэтому интерес к высоким БО имеет достаточно оснований.
Другим следствием высоких орбит является уменьшение потребных разностей скоростей ΔV в межорбитальных переходах (например, гомановских), что открывает благоприятные возможности применения неракетных систем, например, ТС.
Как отмечено выше, применение ТС описано в [1, с. 48-61], где представлены различные схемы их построения. Однако в [1] главное внимание уделено гравитационно стабилизированным ТС, эффективность которых, в смысле реализуемых ΔV, пропорциональна их длине, что существенно затрудняет их применение для орбитальных маневров КА (ввиду малой угловой скорости синхронного вращения ТС вокруг их центров масс, равной угловой орбитальной скорости (ω0), которая для высоких орбит составляет ω0 ~ 10-4 с-1 и менее, так что длины ТС оказываются практически неприемлемыми: более ~ 1000 км для ΔV ~ 100 м/с).
Чтобы получить возможность практического применения ТС для орбитальных маневров, надо перейти к другому их типу- быстро вращающимся ТС (см., например, [2] Итоги науки и техники. Ракетостроение и космическая техника. Т. 12, ВИНИТИ, М. 1991, с. 108-111), которые наиболее подходят для высокоорбитальных переходов между БО, ГСО и другими орбитами.
Таким образом, исходя из сказанного, в качестве ближайших аналогов предлагаемых изобретений могут быть взяты космическая инфраструктура и способ обслуживания КО посредством этой инфраструктуры, описанные в [1, с. 69-71].
Известная космическая инфраструктура [1] включает в себя расположенные на базовой орбите (БО) один или более орбитальных транспортно-технических центров (ТТЦ), снабженных средствами формирования ПН для обслуживания КО, взаимодействующие с ТТЦ многоразовые модульные МТА для доставки ПН к обслуживаемым КО, с последующим возвратом на БО.
Известный способ обслуживания КО [1] включает размещение на околоземной БО транспортно-технических центров (ТТЦ), СО и модульных МТА для доставки СО на орбиты обслуживаемых КО, взаимодействие СО и МТА с ТТЦ, перелеты МТА между БО и орбитами КО.
Недостатком известных решений [1] является то, что в них специально не рассмотрено обслуживание КО (спутников) на ГСО, наряду с обслуживанием КО на средних и высоких орбитах, не выявлены связанные с этим возможности экономии ресурсов, в т.ч. рабочего тела для МТА - за счет применения нетрадиционных систем, таких как ТС, и не определены соответствующие комбинированные схемы такого обслуживания.
Сущность изобретений
Задачей предлагаемых изобретений является устранение указанного выше недостатка путем разработки космической инфраструктуры (КИС) и способа обслуживания КО на ГСО и более низких орбитах посредством этой КИС, позволяющих обеспечить указанное обслуживание КО (спутников) с существенной экономией ресурсов и с достаточной оперативностью, достигаемыми благодаря применению быстровращающихся ТС.
Техническим результатом является достижение экономичного и оперативного обслуживания КО на ГСО и других орбитах, обеспечиваемого высоким уровнем внеземной производственно-технической активности и (частичным) использованием нереактивных систем, таких как быстровращающиеся ТС.
Решение поставленной задачи, с получением указанного технического результата достигается тем, что в КИС, включающей в себя расположенные на БО один или более орбитальных ТТЦ, снабженных средствами формирования ПН для обслуживания КО, взаимодействующие с ТТЦ многоразовые модульные МТА для доставки ПН к обслуживаемым КО, с последующим возвратом на БО, БО выбрана экваториальной круговой, близкой к ГСО, МТА снабжены ТС регулируемой длины, содержащими на концах ТС средства стыковки и расстыковки с указанными ПН, доставляемыми на ГСО, с модулями МТА и с обслуживаемыми КО на ГСО, причем средство стыковки с КО снабжено головкой наведения на КО (ГНКО), а средство стыковки с ПН или модулем МТА снабжено тросовой лебедкой, при этом ТТЦ содержат средства получения из отработавших срок и аварийных элементов и систем КО обновленных элементов и систем для использования в составе обслуживаемых КО.
В основном варианте реализации КИС, ПН, доставляемыми на ГСО, являются КО, заменяющие отработавшие или аварийные КО на ГСО.
Преимущественно, средства стыковки и тросовая лебедка снабжены автономными системами управления, причем лебедка имеет возможность подключения через разъем к системе энергопитания МТА, а ГНКО снабжена ракетными двигателями для управления траекторией ее движения и ориентации.
Решение поставленной задачи и достижение технического результата обеспечиваются также способом обслуживания КО посредством указанной выше КИС, включающим формирование на БО с помощью ТТЦ ПН для обслуживания КО, доставку ПН с помощью МТА к КО и возврат МТА на БО, причем на БО стыкуют ПН с МТА, соединяют ПН с концом ТС, где размещена лебедка, выводят связку состыкованных объектов и ТС на переходную к ГСО орбиту, на которой регулируют длину и угловую скорость вращения ТС вокруг центра масс связки, при достижении апогея переходной орбиты осуществляют наведение и стыковку соответствующего конца ТС с обслуживаемым КО, фиксацию длины троса между ПН и КО, отделяют ПН от МТА, образуя тем самым вращающуюся связку КО и ПН, а затем отделяют ПН от троса в момент достижения ПН, вследствие ее вращения вокруг центра масс связки, скорости, близкой к орбитальной скорости на ГСО, при этом КО, состыкованный с тросом, переходит на орбиту, близкую к переходной.
В предпочтительном варианте, при выведении образованной на БО связки на переходную орбиту сообщают связке начальное вращение вокруг ее центра масс, разводя концы ТС в поперечном направлении на достаточную длину перед запуском двигателя МТА, а угловую скорость вращения ТС при движении связки по переходной орбите регулируют путем изменения длины троса до получения на свободном конце троса, где размещена ГНКО, заданной скорости движения относительно центра масс связки, по величине близкой к разности скоростей на ГСО и в апогее переходной орбиты, одновременно синхронизируя вращение связки с ее орбитальным движением, при достижении апогея корректируют движение свободного конца ТС посредством ГНКО и осуществляют стыковку с КО, выбирают трос при его минимальном натяжении и фиксируют минимальную длину троса непосредственно перед отделением ПН от МТА.
Если масса ПН меньше массы КО, то перед отделением МТА от ПН в апогее переходной орбиты прикладывают к МТА корректирующий тормозной импульс, а при вращении связки ПН и КО увеличивают ее длину, путем травления троса, в отношении, пропорциональном отношению масс КО и ПН.
Если масса ПН больше массы КО, то снабжают ПН корректирующим двигательным модулем (КДМ), который на БО соединяют с концом ТС, где размещена лебедка, в апогее переходной орбиты отделяют МТА от ПН (состыкованной с КДМ), при вращении связки ПН и КО ее длину не изменяют, перед отделением ПН от КДМ прикладывают к ПН посредством КДМ. корректирующий разгонный импульс, после чего отделяют КДМ от ПН, а затем посредством КДМ прикладывают через трос, в подходящей фазе его вращения, корректирующий разгонный импульс к КО.
В предпочтительном варианте, указанный КО (снятый с ГСО), состыкованный с тросом, переводят с орбиты, близкой к переходной, на БО и помещают в ТТЦ, где получают из отработавших срок и/или аварийных элементов и систем данного КО обновленных элементов и систем, которые используют в формировании ПН для обслуживания КО на более низких, чем ГСО, орбитах.
Перечень фигур
Существо предлагаемых изобретений поясняется нижеследующим детальным описанием примеров их осуществления с прилагаемыми чертежами, на которых изображены:
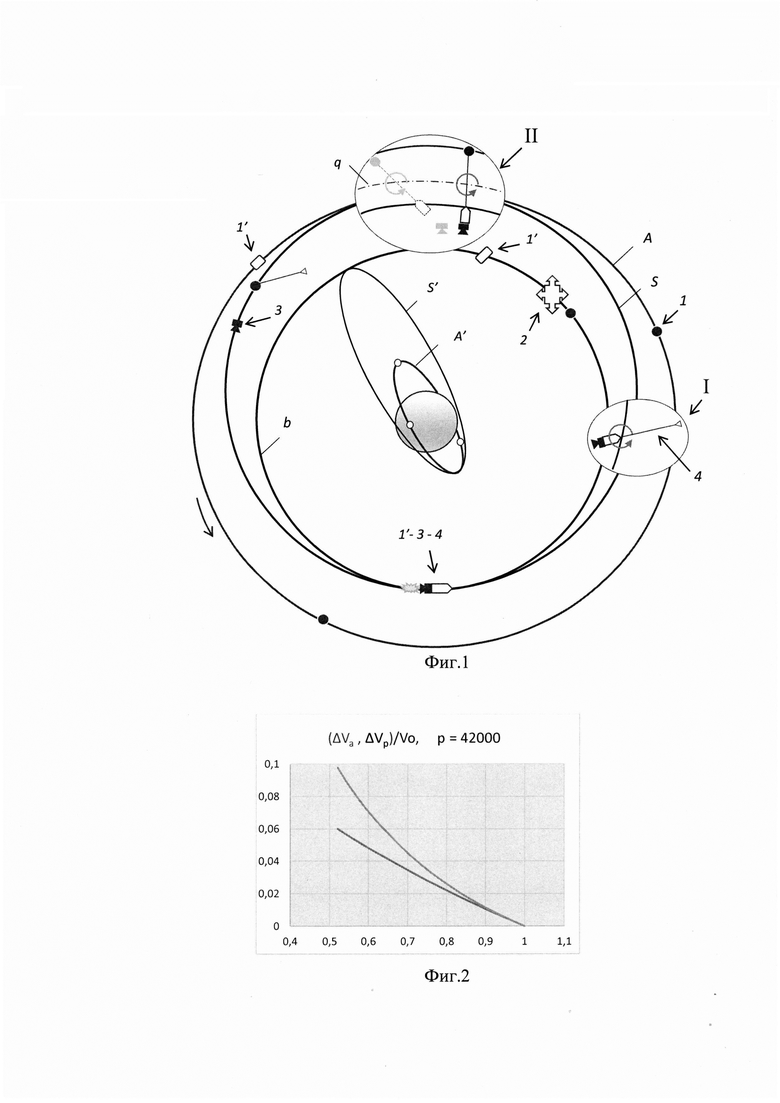
Фиг. 1 - структура предлагаемой КИС и основные особенности ее функционирования;
Фиг. 2 - зависимость величин импульсов скорости в гомановской схеме перехода на ГСО с БО от относительного радиуса БО;
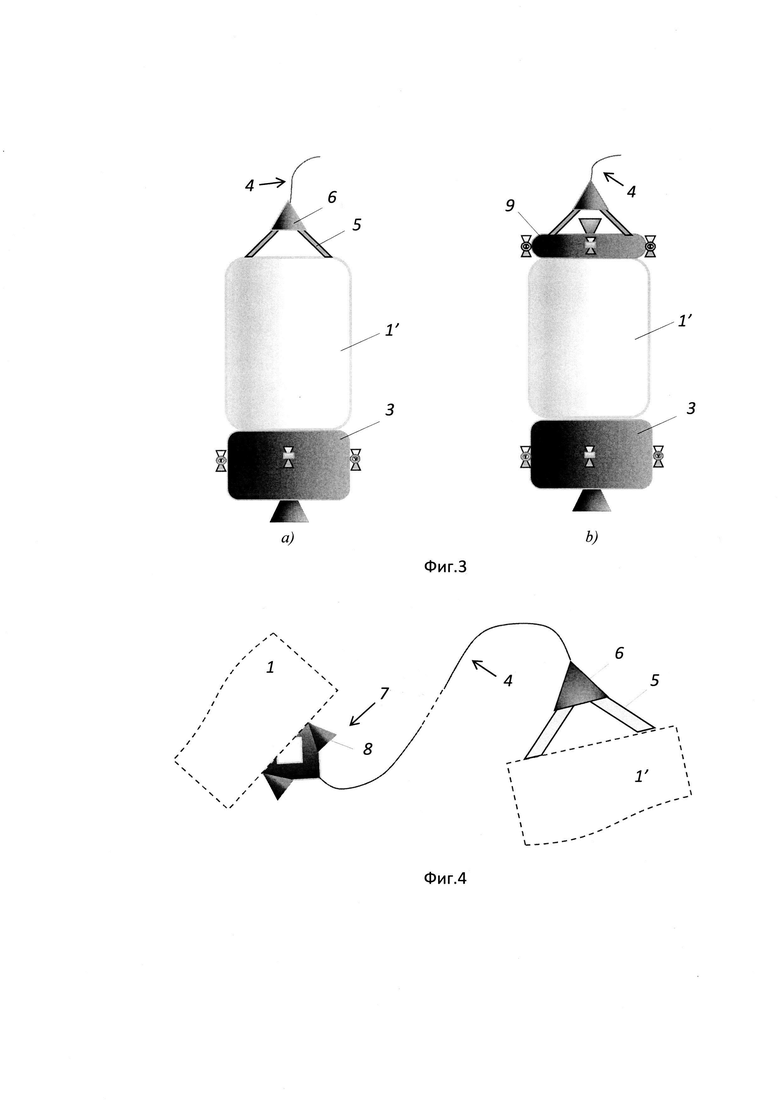
Фиг. 3 - оснащение средств доставки ПН на ГСО при различной относительной массе ПН (по отношению к заменяемому на ГСО спутнику);
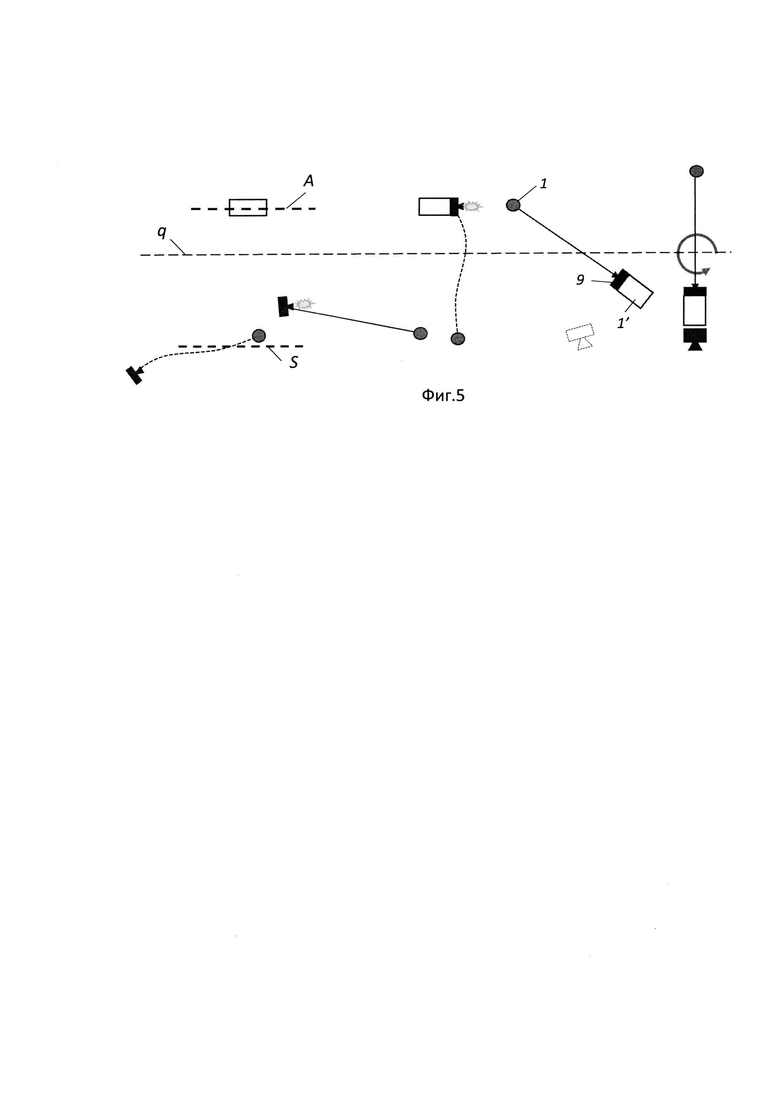
Фиг. 4 - основные элементы ТС;
Фиг. 5 - схема операций по замене на ГСО спутника меньшей массы, чем у заменяющего КО (ПН).
Раскрытие и примеры осуществления изобретений
Предлагаемая КИС включает в себя (фиг. 1) расположенные на БО (6) один или более орбитальных ТТЦ 2, обслуживаемые средствами ТТЦ многоразовые МТА 3 для доставки ПН 1' к обслуживаемым КО 1 по переходным орбитам (5). БО выбрана экваториальной круговой, близкой к ГСО (А). Обслуживаемые КО располагаются как на ГСО, так и на более низких орбитах (Α'), к которым обслуживающие ПН 1' доставляются по переходным орбитам (S').
Близость орбит b и А следует понимать главным образом в смысле достаточной малости величины апогейного импульса скорости (ΔVa) в гомановской схеме перехода между b и А (фиг. 2), что диктуется практической целесообразностью применения ТС - так что радиус БО может составлять, например, 70…60% от радиуса ГСО, т.е. около 30000…25000 км - это отвечает области орбит А' типа ГЛОНАСС/GPS. Такого рода орбиты А' энергетически выгодно обслуживать с близкой к ним БО b.
МТА снабжены ТС с тросами 4, каждая из которых имеет на одном конце средство 5 временной стыковки с ПН 1' (фиг. 3), а на другом конце - средство захвата (стыковки с) КО 1, входящее в состав головки 7 наведения на КО (ГНКО) (фиг. 4). Стыковочное средство 5 снабжено тросовой лебедкой 6, при этом средство 5 стыковки, тросовая лебедка 6 и ГНКО 7 - снабжены автономными системами управления, а ГНКО 7 имеет ракетные двигатели 8 для управления траекторией ее движения и ориентации. Лебедка 6 имеет возможность подключения через разъем к системе энергопитания МТА.
В качестве ПН, доставляемых на ГСО, преимущественно выступают КО (спутники), заменяющие отработавшие или аварийные КО (спутники) на ГСО. При этом используется ТС, посредством которой осуществляется «обмен» КО 1 на ПН 1' (см. область II на фиг. 1). Отслужившие КО 1 возвращаются по нисходящей ветви орбиты S к БО. Их перевод на БО производится МТА, которые сближаются и стыкуются с КО 1 во время движения по орбите S.
Посредством описанной КИС предлагаемый способ осуществляется следующим образом.
На БО формируют (включая ремонт и изготовление элементов КО на ТТЦ 2) ПН для обслуживания (замены) КО. В варианте а) (фиг. 3) стыкуют ПН 1' с МТА 3 и с концом ТС, где размещена лебедка 6 (далее - свободный конец), а затем выводят связку состыкованных объектов и ТС на переходную орбиту S. Перед выведением разводят концы ТС в поперечном (относительно вектора тяги МТА) направлении, удаляя от ПН свободный конец троса на достаточное расстояние (используя двигатели ГНКО или, для экономии, вспомогательные двигатели, отделяемые от ГНКО). Затем запускают двигатель МТА, и в результате сообщения МТА с ПН перигейного импульса скорости (ΔVp) трос 4 приходит во вращение, которое сохраняется и регулируется изменением длины троса (область I на фиг. 1).
Регулированием длины  троса задается такое изменение угловой скорости вращения ω(t) ТС вокруг ее центра масс (ц/м), чтобы к моменту достижения апогея орбиты S скорость свободного конца троса относительно ц/м была ΔVG=VG - Va, где VG - орбитальная скорость на ГСО; Va - скорость ц/м ТС в апогее орбиты S. Закон ω(t) обеспечивает и необходимую синхронизацию вращения ТС с движением ее ц/м - так, чтобы при сближении связки с заменяемым КО 1 в апогее орбиты 5 (область II на фиг. 1) свободный конец троса был вблизи этого КО 1. В этой ситуации ГНКО сравнительно легко наводится и стыкуется с КО 1.
троса задается такое изменение угловой скорости вращения ω(t) ТС вокруг ее центра масс (ц/м), чтобы к моменту достижения апогея орбиты S скорость свободного конца троса относительно ц/м была ΔVG=VG - Va, где VG - орбитальная скорость на ГСО; Va - скорость ц/м ТС в апогее орбиты S. Закон ω(t) обеспечивает и необходимую синхронизацию вращения ТС с движением ее ц/м - так, чтобы при сближении связки с заменяемым КО 1 в апогее орбиты 5 (область II на фиг. 1) свободный конец троса был вблизи этого КО 1. В этой ситуации ГНКО сравнительно легко наводится и стыкуется с КО 1.
Далее трос 4 выбирают лебедкой 6 при его минимальном натяжении и фиксируют минимальную длину троса непосредственно перед отделением ПН 1' от МТА 3. В результате отделения ПН от МТА образуется быстро вращающаяся связка ПН 1' и КО 1, ц/м которой движется по орбите q с некоторой скоростью Vq (зависящей от масс Μ и m - соответственно ПН и КО 1), промежуточной между VG и Va (область II на фиг. 1).
Через пол-оборота связки вокруг ц/м ПН 1' и КО 1 меняются ролями: ПН переходит на орбиту, близкую к ГСО, а КО 1 - на орбиту, близкую к S. В этот момент ПН отделяют от КО 1. Точный обмен орбитами ПН и КО 1 происходит в случае равенства их масс: М=m, и тогда имеет место 100% экономия топлива, традиционно требующегося для указанной замены спутников. Другими словами, экономится характеристическая скорость = 2ΔVG.
Однако практически массы спутников могут отличаться, как в сторону возрастания:  так и в сторону уменьшения;
так и в сторону уменьшения;  В первом случае заменяющий
В первом случае заменяющий
спутник (М>т) может быть более мощным и многофункциональным, а во втором случае (М<т) - того же назначения, но более совершенным. В данной ситуации необходима реактивная коррекция и, кроме того, можно применить регулирование длины троса связки ПН и КО 1.
Используя формулы для скоростей концов быстро вращающейся связки (см. [2], с. 108-109), можно получить для скоростей ПН (VM') и КО 1 (Vm') через пол-оборота связки вокруг ее ц/м следующие выражения:
Где  - коэффициент удлинения троса от начальной до конечной длины, причем далее считается, что λ ≤ 1, т.е. трос может только удлиняться (стравливаться с лебедки 6), т.к. подтягивание троса во вращении связки требует значительной мощности лебедки, что нежелательно. Из (1) видно, что при
- коэффициент удлинения троса от начальной до конечной длины, причем далее считается, что λ ≤ 1, т.е. трос может только удлиняться (стравливаться с лебедки 6), т.к. подтягивание троса во вращении связки требует значительной мощности лебедки, что нежелательно. Из (1) видно, что при  т.е. спутники просто меняются орбитами (т.к. вначале VM=Va, Vm=VG).
т.е. спутники просто меняются орбитами (т.к. вначале VM=Va, Vm=VG).
В рассмотренном выше варианте а) выполнено условие  при котором из (1) следует, что всегда VM' ≡ VG, т.е. ПН автоматически выходит на ГСО. Но заменяемый спутник (КО 1) на орбиту S' не переводится: Vm' ≠ Va. Для этого нужна коррекция скорости Va → Va+ΔVa перед отделением ПН 1' от МТА 3. Коррекция осуществляется двигателем МТА и составляет
при котором из (1) следует, что всегда VM' ≡ VG, т.е. ПН автоматически выходит на ГСО. Но заменяемый спутник (КО 1) на орбиту S' не переводится: Vm' ≠ Va. Для этого нужна коррекция скорости Va → Va+ΔVa перед отделением ПН 1' от МТА 3. Коррекция осуществляется двигателем МТА и составляет  При
При  выпускается трос, т.к.
выпускается трос, т.к.  Заметим, что ΔVa растет с ростом
Заметим, что ΔVa растет с ростом  но масса Μ убывает в том же отношении, так что импульс коррекции растет медленнее:
но масса Μ убывает в том же отношении, так что импульс коррекции растет медленнее: 
В варианте б) (фиг. 3) выполнены условия  и λ ≡ 1, и обе скорости концов ТС через пол-оборота связки ПН и КО 1 не совпадают с требуемыми: VM' ≠ VG, Vm' ≠ Va, так что нужна коррекция конечных скоростей как ПН, так и КО 1, причем величины обеих коррекций одинаковы и равны
и λ ≡ 1, и обе скорости концов ТС через пол-оборота связки ПН и КО 1 не совпадают с требуемыми: VM' ≠ VG, Vm' ≠ Va, так что нужна коррекция конечных скоростей как ПН, так и КО 1, причем величины обеих коррекций одинаковы и равны 
Для указанных коррекций служит КДМ 9, стыкуемая к ПН 1' со стороны, противоположной МТА 3, причем средство стыковки 5 с лебедкой 6 стыкуется с КДМ 9 (фиг. 3, б)).
Схема операций в апогее орбиты 5 в рассматриваемом варианте показана на фиг. 5. После отделения ПН 1' от МТА и завершения пол-оборота связки вокруг своего ц/м производится первая коррекция скорости ΔVM ПН при ослабленном тросе (что облегчает перевод КДМ в требуемую ориентацию). По ее завершении отделяют ПН от КДМ, сохраняя связь КДМ с КО 1. Затем натяжение троса постепенно увеличивают, и в положении ТС, близком к тангенциальному (для орбиты S), производят вторую коррекцию скорости ΔVm КО 1, используя буксировку последнего на тросе с помощью КДМ. В итоге КДМ и КО 1 переводятся на орбиту S.
Эффективность описанной выше схемы замены КО на орбитах А и S можно оценить показателем
в виде отношения суммы потребных импульсов коррекции траекторий ПН и КО 1 в обменной схеме к суммарному потребному импульсу в традиционной схеме замены спутников. Нетрудно показать, что данный показатель для всех случаев реализации обмена с помощью ТС (т.е. для любых  ) будет одинаков и составит
) будет одинаков и составит 
Таким образом, выигрыш будет ощутимым даже при значительном отличии масс заменяемых и заменяющих спутников: например, при отличии их масс в три раза в ту и другую сторону:  или 1/3, значение
или 1/3, значение  т.е. затраты будут вдвое меньше традиционных; для
т.е. затраты будут вдвое меньше традиционных; для  или 0,67 значение
или 0,67 значение  т.е. затраты - в пять раз меньше и т.д.
т.е. затраты - в пять раз меньше и т.д.
Принципиально, схему обмена посредством ТС можно применять в той или иной мере при обслуживании спутников не только на ГСО, но и на других орбитах (например, орбитах А' на фиг. 1). Причем критическим моментом является не масса троса, а его длина и тонкость (низкая живучесть).
Относительная масса μ троса вращающейся связки, как известно, зависит от удельной прочности [σ] материала троса и разности ΔV скоростей ц/м связки и некоторой массы на конце троса (по отношению к которой и определяется масса троса). Для троса постоянного сечения эта масса μ = ΔV2/(g0[σ]) (см. [2], с. 20). Удельная прочность современных марок волокна Kevlar [σ] ~ 3*106 м (для УНТ («графена») она выше на порядок и более). При ΔV = 300, 500, 1000 и 2000 м/с будет соответственно: μ ≈ 0,003; 0,008; 0,03 и 0,13.
Таким образом, масса μ троса для обменных маневров с ΔV ~ 1000 м/с и ниже пренебрежимо мала; причем значения μ на один - два порядка ниже, чем потребная относительная масса топлива для таких маневров при использовании двигателя с удельным импульсом ~350 с (электроракетные двигатели хотя и приближаются по расходу рабочего тела к приведенным значениям μ, но сами достаточно массивны и дают низкую оперативность обслуживания).
Однако требование ограничения перегрузки  действующей на ПН или КО во вращении, задает минимальную допустимую длину троса
действующей на ПН или КО во вращении, задает минимальную допустимую длину троса  В частности, для ΔV = 500 м/с и n = 10 будет
В частности, для ΔV = 500 м/с и n = 10 будет  км, а в более мягком режиме n = 2…4:
км, а в более мягком режиме n = 2…4:  км. Это - вполне приемлемо. Однако для ΔV = 1000 м/с мягкий режим дает уже ~ 25…13 км (что пока проблематично); при допустимости n = 10 будет
км. Это - вполне приемлемо. Однако для ΔV = 1000 м/с мягкий режим дает уже ~ 25…13 км (что пока проблематично); при допустимости n = 10 будет  км, что по-видимому приемлемо и т.д.
км, что по-видимому приемлемо и т.д.
Исходя из такого рода ограничений выбирается положение БО (фиг. 2). На графиках гомановские импульсы скорости ΔVa и ΔVP отнесены к скорости V0 = 7540 м/с на низкой орбите с радиусом 7000 км. Например, для ΔVa = 500 м/с ≈ 0,066V0 из графика получаем минимальный радиус БО ≈ 0,6 радиуса ГСО, т.е. примерно 25 200 км; для ΔVa = 300 м/с минимальный радиус БО ≈ 0,72 или 30 200 км и т.д.
Промышленная применимость Для осуществления предлагаемых изобретений не требуется принципиально новых теоретических представлений и разработок в области космической техники; здесь могут быть использованы, в основном, традиционные и апробированные, а также теоретически подробно исследованные средства и методы построения космических систем и управления ими.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обслуживания космических объектов на орбитах различного наклонения и высокоорбитальная космическая инфраструктура для реализации способа | 2022 |
|
RU2775039C1 |
| Способ обслуживания системы спутников на околокруговых орбитах и космическая обслуживающая система для осуществления способа | 2022 |
|
RU2772498C1 |
| Космическая обслуживающая система и способ ее функционирования | 2022 |
|
RU2771191C1 |
| Способ обслуживания искусственных спутников на средних и высоких околоземных орбитах | 2022 |
|
RU2774915C1 |
| КОСМИЧЕСКАЯ ОБСЛУЖИВАЮЩАЯ СИСТЕМА И СПОСОБ ЕЕ ПОСТРОЕНИЯ | 2013 |
|
RU2535760C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ | 2015 |
|
RU2605463C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2014 |
|
RU2562908C2 |
| СПОСОБ РАЗМЕЩЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2480384C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНОЙ КОСМИЧЕСКОЙ СИСТЕМОЙ | 2015 |
|
RU2614466C2 |
| Способ увода объектов крупногабаритного космического мусора и устройство для его реализации | 2021 |
|
RU2775092C1 |
Изобретения относятся к средствам и методам обслуживания спутниковых систем различного назначения, преимущественно в эпоху достаточно развитой индустриализации околоземного и окололунного пространства. Космическая инфраструктура содержит на базовой орбите (БО), близкой к геостационарной орбите (ГСО), центры ремонта, модификации, производства и сборки элементов и систем космических объектов (КО), а также средства обслуживания КО. Эти средства включают быстровращающиеся тросовые системы (ТС), используемые для замены спутников, преимущественно на ГСО, нереактивным способом, а также межорбитальные транспортные аппараты (МТА) для доставки указанных средств к КО. Модули МТА применяют также для коррекций траекторий КО, взаимодействующих с ТС. Доставленные на БО отработавшие КО используют в модификации и производстве новых КО и/или их частей. Техническим результатом является достижение оперативного обслуживания КО на ГСО и других орбитах, обеспечиваемого высоким уровнем внеземной производственно-технической активности, а также частичным использованием нереактивных средств (ТС). 2 н. и 6 з. п. ф-лы, 5 ил.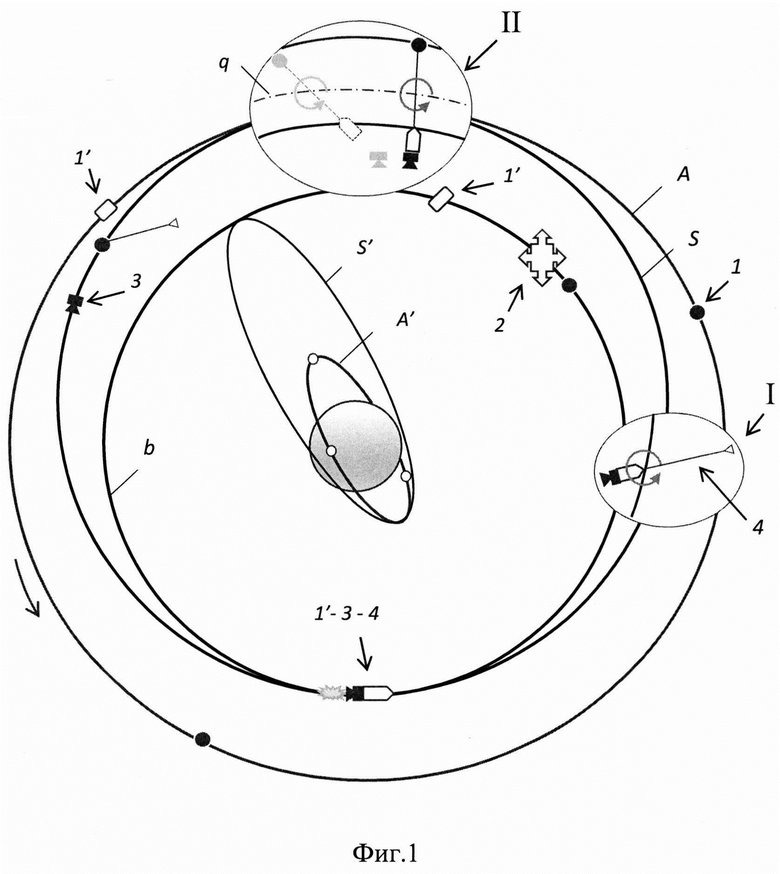
1. Космическая инфраструктура для обслуживания космических объектов (КО) на геостационарной (ГСО) и более низких орбитах, включающая в себя расположенные на базовой орбите (БО) один или более орбитальных транспортно-технических центров (ТТЦ), снабженных средствами формирования полезных нагрузок (ПН) для обслуживания КО, взаимодействующие с ТТЦ многоразовые модульные межорбитальные транспортные аппараты (МТА) для доставки ПН к обслуживаемым КО с последующим возвратом на БО, отличающаяся тем, что БО выбрана экваториальной круговой, близкой к ГСО, МТА снабжены тросовыми системами (ТС) регулируемой длины, содержащими на концах ТС средства стыковки и расстыковки с указанными ПН, доставляемыми на ГСО, с модулями МТА и с обслуживаемыми КО на ГСО, причем средство стыковки с КО снабжено головкой наведения на КО (ГНКО), а средство стыковки с ПН или модулем МТА снабжено тросовой лебедкой, при этом ТТЦ содержат средства получения из отработавших срок и аварийных элементов и систем КО обновленных элементов и систем для использования в составе обслуживаемых КО.
2. Космическая инфраструктура по п. 1, отличающаяся тем, что ПН, доставляемые на ГСО, являются КО, заменяющими отработавшие или аварийные КО на ГСО.
3. Космическая инфраструктура по п. 1 или 2, отличающаяся тем, что средства стыковки и тросовая лебедка снабжены автономными системами управления, причем лебедка имеет возможность подключения через разъем к системе энергопитания МТА, а ГНКО снабжена ракетными двигателями для управления траекторией ее движения и ориентации.
4. Способ обслуживания КО посредством космической инфраструктуры по любому из пп. 1-3, включающий формирование на БО с помощью ТТЦ ПН для обслуживания КО, доставку ПН с помощью МТА к КО и возврат МТА на БО, отличающийся тем, что на БО стыкуют ПН с МТА, соединяют ПН с концом ТС, где размещена лебедка, выводят связку состыкованных объектов и ТС на переходную к ГСО орбиту, на которой регулируют длину и угловую скорость вращения ТС вокруг центра масс связки, при достижении апогея переходной орбиты осуществляют наведение и стыковку соответствующего конца ТС с обслуживаемым КО, фиксацию длины троса между ПН и КО, отделяют ПН от МТА, образуя тем самым вращающуюся связку КО и ПН, а затем отделяют ПН от троса в момент достижения ПН, вследствие ее вращения вокруг центра масс связки, скорости, близкой к орбитальной скорости на ГСО, при этом КО, состыкованный с тросом, переходит на орбиту, близкую к переходной.
5. Способ по п. 4, отличающийся тем, что при выведении образованной на БО связки на переходную орбиту сообщают связке начальное вращение вокруг ее центра масс, разводя концы ТС в поперечном направлении на достаточную длину перед запуском двигателя МТА, а угловую скорость вращения ТС при движении связки по переходной орбите регулируют путем изменения длины троса до получения на свободном конце троса, где размещена ГНКО, заданной скорости движения относительно центра масс связки, по величине, близкой к разности скоростей на ГСО и в апогее переходной орбиты, одновременно синхронизируя вращение связки с ее орбитальным движением, при достижении апогея корректируют движение свободного конца ТС посредством ГНКО и осуществляют стыковку с КО, выбирают трос при его минимальном натяжении и фиксируют минимальную длину троса непосредственно перед отделением ПН от МТА.
6. Способ по п. 4 или 5, отличающийся тем, что при массе ПН, меньшей массы КО, перед отделением МТА от ПН в апогее переходной орбиты прикладывают к МТА корректирующий тормозной импульс, а при вращении связки ПН и КО увеличивают ее длину путем травления троса в отношении, пропорциональном отношению масс КО и ПН.
7. Способ по п. 4 или 5, отличающийся тем, что при массе ПН, большей массы КО, снабжают ПН корректирующим двигательным модулем (КДМ), который на БО соединяют с концом ТС, где размещена лебедка, в апогее переходной орбиты отделяют МТА от ПН (состыкованной с КДМ), при вращении связки ПН и КО ее длину не изменяют, перед отделением ПН от КДМ прикладывают к ПН посредством КДМ корректирующий разгонный импульс, после чего отделяют КДМ от ПН, а затем посредством КДМ прикладывают через трос в подходящей фазе его вращения корректирующий разгонный импульс к КО.
8. Способ по п. 4, отличающийся тем, что указанный КО, состыкованный с тросом, переводят с орбиты, близкой к переходной, на БО и помещают в ТТЦ, где получают из отработавших срок и/или аварийных элементов и систем данного КО обновленных элементов и систем, которые используют в формировании ПН для обслуживания КО на более низких, чем ГСО, орбитах.
| US 7681840 B1, 23.03.2010 | |||
| Екимовская, А | |||
| А | |||
| Орбитальный переход Гомана посредством вращающихся тросовых систем / А | |||
| А | |||
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| Весенняя сессия : Сборник научных трудов по материалам фестиваля науки, г.о | |||
| Королёв, 17-24 апреля 2021 года | |||
| - Москва: Общество с ограниченной ответственностью "Научный консультант", | |||

