Изобретение относится к области обеспечения безаварийного движения автомобильной техники (AT), и может быть использовано для автоматизации предупреждения столкновений AT во время движения в колонне при возникающей аварийной ситуации и регулирования параметров колонны в различных дорожных условиях. Изобретение рассчитано, прежде всего, на использование современных бортовых электронных систем управления (БЭСУ), обеспечивающих оптимальную скорость и безопасность движения в колонне. Реализация предлагаемого способа возможна при разработке новых и в ходе модернизации существующих БЭСУ движением AT.
Движение AT в составе организованных колонн осуществляется с соблюдением скоростного режима, выдерживанием установленной дистанции, принятием других мер по обеспечению безопасности движения, в том числе в сложных дорожных условиях.
Движение колонны по маршруту сопровождается преодолением участков, с различающимся состоянием опорной поверхности (ОП), рельефа, кривизны траектории, а также воздействием других внешних и внутренних возмущающих факторов, вызывающих необходимость изменения режима движения участников колонны, что в условиях отсутствия абсолютной синхронности по совокупности приводит к появлению задержек движения и постоянному изменению параметров колонны: дистанции между AT, длины колонны, средней скорости движения колонны.
Интенсивное сокращение дистанции между участниками колонны приводит к созданию аварийной обстановки, а увеличение - к растягиванию и разрыву колонны.
В этой связи в рамках повышения подвижности и обеспечения безопасности движения AT в колонне актуальным направлением является поддержание заданных оптимальных параметров колонны (длина и скорость движения колонны, задержки движения) за счет улучшения способа управления транспортными средствами в колонне.
БЭСУ современных автомобилей, как правило, имеют электронные системы управления, предназначенные для контроля и диагностики узлов и агрегатов AT. Известны автоматизированные системы обеспечения безопасности движения (системы обеспечения курсовой и поперечной устойчивости, системы предотвращения столкновения).
Ряд современных автоматизированных электронных систем имеет возможность определения положения транспортного средства в координатном пространстве и параметров его взаимодействия с окружающей средой и другими участниками движения, в том числе на основе анализа состояния среды, в которой осуществляется движение, и внесения при необходимости корректировок в процесс управления транспортным средством в соответствии с заданными алгоритмами.
Вероятности столкновения транспортных средств в колонне рст и растягивания (или разрыва) колонны рр должны стремиться к минимуму, скорость νк колонны должна стремиться к максимуму (либо к целевой скорости νц), дистанция di между соседними транспортными средствами (i и i+1) должна стремиться к заданному значению dц, обеспечивающему безопасность движения и требуемую протяженность (длину) колонны. Это значение обычно зависит от целевой скорости движения.
БЭСУ обеспечивает управление движением транспортной колонны за счет автоматической корректировки скорости движения транспортных средств νi, либо за счет рекомендации по скоростному режиму водителю с последующей корректировкой значения скорости водителем. Поэтому основное действие БЭСУ сводится к определению и установлению с помощью исполнительных схем оптимальной скорости движения νi(t-Δt) транспортного средства i в последующий момент времени t+Δt по отношению к текущему моменту времени t. Для определения оптимальной скорости νi(t+Δt) БЭСУ использует множество данных в момент времени t. Основными исходными данными для управления служат текущие значения скоростей и дистанции всех транспортных средств колонны в заданных условиях движения:

где i - индекс транспортного средства, оснащенного БЭСУ;
F - функция управления;
j - индекс транспортного средства колонны (j=1…n);
{νj(t)} - множество скоростей транспортных средств колонны в текущий момент времени t;
{dj(t)} - множество дистанций между транспортными средствами колонны.
В рамках решения задачи (1) управление колонной осуществляется непосредственно по текущему состоянию колонны. Для оптимального управления колонной этого не достаточно, поэтому к параметрам текущего состояния колонны {νj(t)}, {dj(t)} необходимо добавлять параметры прогнозируемого состояния колонны  :
:

Реализация способа управления колонной по параметрам ее прогнозируемого состояния осуществляется с использованием нейросетевого прогнозирования.
Известен способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны на территориях с холодным климатом, содержащей ведущее пилотное транспортное средство (ПТС) и, по меньшей мере, одно ведомое автоматически управляемое беспилотное транспортное средств (БТС), включающий получение водителем пилотного транспортного средства задания на проводку колонны с тактико-техническими характеристиками (ТТХ) всех транспортных средств (ТС), ее составляющих, описание маршрута движения и комплекта маршрутных карт для всех ТС, как пилотного, так и беспилотных, адаптирование под реальные ТТХ каждого БТС, их прогностическую корректировку по реальному прогнозу технического состояния каждого ТС и прогнозу состояния дорожных и погодных условий на маршруте, передачу на каждое БТС соответствующей адаптированной прогностической маршрутной карты, при движении на маршруте ответный контроль технического состояния каждого БТС, реальных дорожных и погодных условий и выполнение действий согласно указанной маршрутной карте, с осуществлением в режиме реального времени контроля и двусторонней передачи данных о маршруте от ПТС к каждому БТС и обратно о техническом состоянии каждого БТС и о локальных дорожных и погодных условиях по маршруту его движения, при этом передача ведется последовательно через средства связи и управления, выполненные многоканальными, иерархически подчиненными в соответствии с порядком расположения и движения ПТС и БТС в колонне, и обратно, также БТС автоматически пересылают отчеты о результатах выполнения действий по движению, соответствующих требованиям маршрутной карты каждого БТС, причем водитель ПТС определяет каждый вновь выявленный им реально измененный участок маршрута с определением локальных контрольных точек его начала и окончания, а также типа опасных или измененных маршрута и/или условий движения, перед прохождением которого каждое БТС автоматически по команде из ПТС изменяет маршрут и/или условия движения в маршрутной карте по заранее установленным критериям безопасного движения, и после прохождения которых каждое БТС автоматически посылает сигнал о благополучном или аварийном преодолении опасного участка и его локальных контрольных точек, причем каждое БТС при каждом невыполнении действий в соответствии с требованиями маршрутной карты или при возникновении аварийной ситуации автоматически посылает на ПТС аварийный сигнал с автоматизированным определением и указанием причины [патент RU 2690143 C1 B60W 30/165 G07C 5/08].
Рассматриваемый способ предусматривает, что средства контроля технического состояния и локальных дорожных и погодных условий по маршруту движения каждого БТС в режиме реального времени включают, по меньшей мере, динамически управляемую адаптивную систему круиз-контроля, средства контроля расстояния до ПТС и ближайших БТС, определения состояния поверхности дороги и ее подосновы.
Недостатком рассматриваемого способа является то, что его использование ограничено определенными условиями эксплуатации колонны и не может быть применено в общем транспортном потоке, так как способ имеет возможность контроля положения БТС в колонне и аварийного сближения с другими БТС и не предусматривает учет встраивания в колонну других транспортных средств.
Вместе с тем, рассматриваемый способ управления колонной обеспечивает регулирование скоростей БТС с целью исключения их столкновения в колоне и не предусматривает автоматического регулирования скоростей движения БТС в функции поддержания заданной длинны колонны, так как иерархическая последовательная передача команд и сообщений последовательно от одного БТС к другому согласно порядку расположения БТС в колонне не предусматривает проведения комплексного анализа состояния параметров колонны в целом для какого-либо конкретного БТС и прогностической корректировки режима его движения на основе прогноза возможности осуществления на опасных участках и их локальных контрольных точках движения другими БТС и прогнозируемой величины их скорости, вероятного изменения вследствие этого дистанции между участниками колонны и управления скоростью конкретного БТС с целью исключения разрыва или растягивания колонны и поддержания заданной дистанции между БТС в колонне и обеспечения заданной длины колонны в целом.
Наиболее близким к заявляемому решению (прототипом) является способ управления движением военной автомобильной техники (ВАТ) в составе колонны с учетом неровностей и реологического состояния опорной поверхности (ОП), заключающийся в управлении исполнительными схемами ВАТ и индикацией для реагирования водителем по критерию выдерживания постоянного расстояния между ВАТ в составе колонны с прогнозированием наиболее вероятного состояния колонны через определенный интервал времени с помощью искусственной радиальной нейронной сети и базы данных о предыдущих и последующих состояниях колонны на основе регулярного измерения исходных данных для прогнозирования: координат от подсистемы навигации, дистанции до впереди идущего автомобиля, скорости автомобиля, компонентов ускорений и наклонов автомобиля, параметров рельефа и реологического состояния опорной поверхности [патент RU 2746046 С2 G05D 1/00 G05D 3/00 G08G 1/16 B60W 30/095 B60W 30/10 B60W 30/16 B60W 40/06 B60W 40/10].
В качестве недостатков прототипа рассматривается то, что управление движением транспортных средств в колонне с использованием прогнозирования осуществляется путем обеспечения оптимальной скорости по параметрам безопасной дистанции между автомобилями с учетом состояния ОП за счет применения исполнительных схем (управления подачей топлива и управления тормозной системой), которые в случаях наиболее опасного сближения транспортных средств формируют необходимое замедление автомобиля, независимо от действий водителя, что не предоставляет водителю возможности совершения маневра (для выезда на обочину или полосу встречного движения при резкой остановке или скатывании (сползании) назад при движении на подъеме впереди идущего транспортного средства).
Также отмечается, что рассматриваемый способ не предусматривает прогноз состояния колонны и управление ею по критериям обеспечения безопасности и возможности движения транспортных средств на участках маршрута колонны со сложными дорожно-грунтовыми условиями, когда происходит снижение скорости движения транспортных средств по условиям сопротивления движению или обеспечения безопасности по заносу или опрокидыванию. Отсутствие прогнозной информации и рекомендаций по выбору скоростного режима движения на предстоящих участках со сложными дорожно-грунтовыми условиями создает предпосылки к аварийности, приводит к рассогласованному скоростному режиму участников колонны, что вызывает разрыв или растягивание колонны. При этом способ не предусматривает учет встраивания в колонну других транспортных средств, не являющихся участниками колонны и необорудованных БЭСУ.
Таким образом, задачами, на решение которых направленно заявляемое изобретение, являются:
обеспечение безопасности движения колонны за счет предоставления исполнительными схемами возможности осуществления водителем маневра при резкой остановке или скатывании (сползании) назад при движении на подъеме впереди идущего транспортного средства, а также прогнозирования на предстоящих участках маршрута колонны с изменяющимися рельефом, кривизной и дорожно-грунтовыми условиями критических скоростей по заносу и опрокидыванию;
обеспечение заданной длины колонны, исключение ее разрыва или растягивания при преодолении участков пути с изменением состояния опорной поверхности, рельефа и кривизны маршрута за счет прогнозирования состояния параметров колонны по показателям тягово-скоростных характеристик, критических скоростей по заносу и опрокидыванию всех транспортных средств колонны и информирования водителей о выборе оптимального и безопасного режима движения;
корректировка задаваемых параметров колонны с учетом встраивания в колонну посторонних транспортных средств, не являющихся участниками колонны и необорудованных БЭСУ.
Решение указанных задач осуществляется способом управления движением AT в составе колонны с учетом состояния ОП, рельефа и кривизны маршрута, заключающимся в управлении исполнительными схемами AT и индикацией для реагирования водителем по критерию выдерживания постоянного расстояния между AT в составе колонны с прогнозированием наиболее вероятного состояния колонны через определенный интервал времени с помощью искусственной радиальной нейронной сети и базы данных о предыдущих и последующих состояниях колонны на основе регулярного измерения исходных данных для прогнозирования: координат от подсистемы навигации, дистанции до впереди идущего транспортного средства, скорости транспортного средства, компонентов ускорений и наклонов транспортного средства, параметров рельефа и реологического состояния ОП с прогнозированием параметров колонны по критериям обеспечения безопасности и возможности движения каждого транспортного средства в колонне в заданных условиях путем определения показателей тягово-скоростной характеристики, критических скоростей по заносу и опрокидыванию, а также информированием водителей каждого транспортного средства о выборе оптимального и безопасного режима движения по заданным параметрам колонны на основании анализа действий водителя, направленных на соответствие безопасному и оптимальному прогнозируемому режиму движения.
Отличительными признаками от прототипа является то, что способ осуществляет прогнозирование параметров колонны по критериям обеспечения безопасности и возможности движения каждого транспортного средства в колонне в заданных условиях путем определения показателей тягово-скоростной характеристики, критических скоростей по заносу и опрокидыванию, а также информирование водителей каждого транспортного средства о выборе оптимального и безопасного режима движения по заданным параметрам колонны на основании анализа действий водителя, направленных на соответствие безопасному и оптимальному прогнозируемому режиму движения. При этом заданные параметры колонны корректируются с учетом встраивания в состав колонны посторонних транспортных средств, не являющихся участниками колонны и необорудованных БЭСУ.
Реализация способа осуществляется за счет нейросетевого прогнозирования БЭСУ AT при движении в составе колонны, позволяющего с помощью радиальной нейронной сети и базы данных об эталонных состояниях колонны (скорости транспортных средств, дистанции между транспортными средствами) с известными последующими состояниями колонны на основе измерения и обмена между транспортными средствами колонны параметров состояния колонны от подсистем навигации, измерения дистанции до впереди идущего автомобиля, измерения ускорений, уклонов и радиусов поворота, измерения скорости, оценки состояния дороги (классификатор типа дорожно-грунтовых условий (ДГУ)), базы данных о дорожном покрытии, контроля состояния органов управления транспортным средством определить наиболее вероятное состояние колонны через определенный момент времени и скорректировать состояние колонны исполнительными схемами транспортного средства (управлением подачей топлива, тормозной системой, визуальной и звуковой индикацией для реагирования водителя).
Для осуществления заявленного способа для текущей комбинации показаний датчиков и известных параметров ОП необходимо выполнить прогноз дистанции до впереди идущего автомобиля d. Для этого выбираются наиболее похожие комбинации параметров (эталоны), и усредняются с определенными весами, соответствующие им дистанции dj для получения прогноза:

где di - выходной показатель варианта-эталона из базы данных;
αi(ri) - весовой коэффициент нейрона-эталона i, зависящий от расстояния ri, в факторном пространстве (P1, Р2, …, Pm) между данными для прогноза и i-м эталонным вариантом; n - количество вариантов (порядка 1000).
Расстояние в факторном пространстве между новым случаем (Pi, Pm) и эталонным рассчитывается по теореме Пифагора для n измерений:

где j - номер исходного показателя эталона.
С помощью весовых коэффициентов αi учитывается, какую долю информации передают эталоны в зависимости от расстояния до пробной точки факторного пространства. Весовой коэффициент αi должен быть тем больше, чем меньше расстояние ri, а при неограниченном увеличении расстояния αi должен стремиться к нулю. Для весовых коэффициентов используется выражение в форме гауссовой функции:

где индекс 0 в обозначении переменной  означает предварительный ненормированный вариант;
означает предварительный ненормированный вариант;
σ - характерное расстояние, до которого эталоны считаются ближайшими.
При определении весовых коэффициентов αi по выражению (5) производится их нормировка для выполнения условия:

Нормировка коэффициентов  осуществляется по формуле:
осуществляется по формуле:

Окончательное выражение для прогноза показателя d для нового набора данных выглядит следующим образом:

Входными параметрами для прогнозирования являются:
di - дистанция от транспортного средства i до впереди идущего транспортного средства в колонне;
axi - ускорение (замедление) транспортного средства i в горизонтальном продольном направлении х;
νxi - скорость транспортного средства i в направлении х;
Lк - длина колонны, определяемая по показаниям датчиков ГЛОНАСС первого и последнего транспортных средств колонны (Lк=х1-xn) с учетом габаритных размеров транспортных средств.
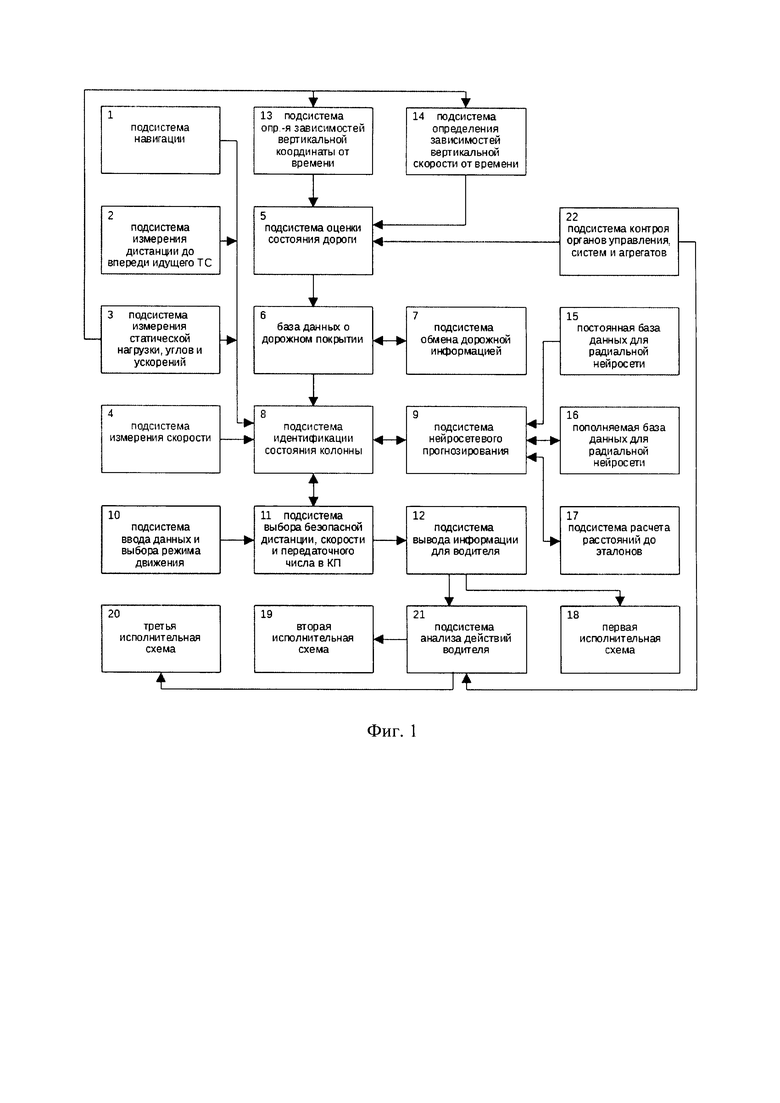
Система управления БЭСУ представляет собой совокупность ряда подсистем (Фиг. 1).
При реализации способа на основе прогнозирования движения AT в составе колонны с учетом состояния ОП происходит обмен информацией между компонентами БЭСУ, которая содержит (Фиг. 1): подсистему 1 навигации; подсистему 2 измерения дистанции до впереди идущего транспортного средства; подсистему 3 измерения статической нагрузки, ускорений и уклонов; подсистему 4 измерения скорости; подсистему 5 оценки состояния дороги (классификатор типа ДГУ); базу данных 6 о дорожном покрытии; подсистему 7 обмена дорожной информацией; подсистему 8 идентификации состояния колонны; подсистему 9 нейросетевого прогнозирования; подсистему 10 ввода данных и выбора режима движения; подсистему 11 выбора безопасной дистанции, скорости и оптимального передаточного числа в коробке передач; подсистему 12 вывода информации для водителя; подсистемы 13 и 14 определения зависимостей от времени вертикальных координаты и скорости, соответственно; постоянную базу данных 15 для радиальной нейросети; пополняемую базу данных 16 для радиальной нейросети; подсистему 17 расчета расстояний до эталонов; первую исполнительную схему (аудиовизуальный сигнал) 18; вторую исполнительную схему (управление подачей топлива) 19; третью исполнительную схему (управление тормозной системой) 20; подсистему 21 анализа действий водителя; подсистему 22 контроля положения органов управления и состояния работы систем и агрегатов.
Заявленный способ управления движением AT в составе колонны с учетом состояния ОП, рельефа и кривизны маршрута реализуется в следующем порядке функционирования подсистем БЭСУ: с помощью подсистемы 10 ввода данных и выбора режима движения задаются дистанция между транспортными средствами и целевая скорость колонны, которые в подсистеме 11 выбора безопасной дистанции, скорости и оптимального передаточного числа в коробке передач сравниваются с реальными и прогнозируемыми дистанцией и скоростью. Также в подсистеме 11 происходит сравнение реальных и прогнозируемых параметров тягово-скоростной характеристики по условиям сопротивления движению, критических значений скорости по опрокидыванию и заносу и делается вывод о соответствии включенной передачи в коробке передач для обеспечения движения и скорости движения для обеспечения безопасности в прогнозируемых условиях. Рассчитанная БЭСУ оптимальная скорость транспортного средства и оптимальная передача в коробке передач отображается для водителя подсистемой 12 вывода информации и одновременно через подсистему 21 анализа действий водителя в зависимости от ситуации подается на исполнение в подсистемы исполнительных устройств 19 и 20 (регулирующую подачу топлива и включающую экстренное торможение, соответственно).
Информация водителю в подсистеме 12 вывода информации формируется на основании выбора рекомендуемых параметров в подсистеме 11 по условиям:
по прогнозируемым параметрам безопасной скорости своего транспортного средства на криволинейных участках маршрута (исключение заноса и опрокидывания);
по прогнозируемым параметрам опорно-тяговой проходимости своего транспортного средства (обеспечение движения по условиям сопротивления движению и отсутствия буксования);
по параметрам длины колонны (исключение растягивания колонны вследствие прогнозируемого или реального снижения скорости движения других участников колонны);
по параметрам безопасной дистанции (исключение столкновения).
Выбор скорости и передачи в коробке передач в подсистеме 11 по перечисленным условиям осуществляется на основе данных подсистемы 8 идентификации состояния колонны. Идентификация состояния колонны производится: во-первых, на основании показаний датчиков подсистемы 1 навигации, подсистемы 2 измерения дистанции до впереди идущего транспортного средства, подсистемы 3 измерения статической нагрузки, ускорений и уклонов, подсистемы 4 измерения скорости, во-вторых, базы данных 6 о дорожном покрытии, в-третьих, подсистемы 9 нейросетевого прогнозирования состояния колонны, которая по текущему и предыдущим состояниям колонны прогнозирует состояние колонны в будущем, через определенный интервал времени Δt.
База данных 6 о дорожном покрытии поддерживается на каждом транспортном средстве колонны и непрерывно пополняется. На основе результатов работы подсистемы 5 оценки состояния дороги первых транспортных средств колонны для последующих становятся известны характеристики дороги (параметры, характеризующие сцепление колес с ОП, сопротивление качению, сопротивление подъему, вибронагрузки), а на основании работы подсистемы 22 контроля положения органов управления и состояния работы систем и агрегатов по положению рулевого колеса осуществляется корректировка кривизны маршрута. Для передачи данных между транспортными средствами используется подсистема 7 обмена дорожной информацией.
На основе сведений о состоянии опорной поверхности, кривизны траектории движения и рельефа, получаемой каждым транспортным средством от подсистемы обмена дорожной информацией, в БЭСУ каждого транспортного средства происходит определение значений критических скоростей по заносу и опрокидыванию, а также значений параметров тягово-скоростных характеристик (номер передачи в коробке передач и скорость движения), обеспечивающих возможность движения по условиям сопротивления движению и отсутствия буксования. Полученные значения поступают в пополняемую базу данных 16 для радиальной нейросети.
При классификации типа дорожно-грунтовых условий в подсистеме 5 используются зависимости от времени вертикальных координат и скорости точки размещения датчика вертикальных ускорений, которые определяются в блоках 13 и 14, соответственно, путем численного интегрирования показаний датчика вертикальных ускорений в подсистеме 3 измерения ускорений и уклонов. На основании показаний датчиков подсистемы 22 контроля положения органов управления и состояния работы систем и агрегатов по измеренным и расчетным значениям линейной скорости колеса определяется величина проскальзывания колеса и на основании зависимости коэффициента сцепления от коэффициента скольжения корректируются сведения о сцепных качествах ОП, по показаниям нагрузки на двигатель, значениям показателей работы двигателя и трансмиссии совместно с данными, поступающими от подсистемы 3 измерения ускорений и уклонов формируются сведения о величине угла и протяженности подъема и параметрах сопротивления движению.
Подсистема нейросетевого прогнозирования 9 использует как постоянную базу данных 15, связывающую дорожно-грунтовые условия, кинематические параметры, тактико-технические характеристики и взаимное расположение транспортных средств в колонне, так и поддерживает обмен с пополняемой базой данных 16. Постоянная база данных 15 заполняется на этапе разработки БЭСУ, основываясь на наиболее распространенных дорожных ситуациях. Пополняемая база данных 16 непрерывно пополняется и через некоторое время после начала специфического режима движения позволяет со всей увеличивающейся точностью прогнозировать дорожную ситуацию для данного режима. За счет обратной связи подсистемы 11 выбора безопасной дистанции, скорости и оптимального передаточного числа в коробке передач с подсистемой 8 идентификации состояния колонны в пополняемую базу данных 16 поступают сведения о реальном и прогнозируемых значениях скорости транспортных средств колонны, обобщенные по условиям обеспечения безопасной дистанции, по условиям сопротивления движению и по условиям исключения заноса и опрокидывания.
В высокопроизводительном вычислительном блоке 17 реализуется нейросетевой расчет: прогнозирование по эталонным ситуациям методом радиальных нейронных сетей. На основании реальных и прогнозируемых значений скоростей транспортных средств колонны осуществляется расчет прогнозируемой дистанции между транспортными средствами и длина колонны, после чего через подсистему 8 идентификации колонны в подсистеме 11 каждому транспортному средству в зависимости от его места в колонне формируются рекомендации по выбору режима движения. Обобщенные рекомендации реализуются через подсистему 12 вывода информации.
Подсистема 12 вывода информации в зависимости от прогнозируемой ситуации может задействовать три уровня реагирования. В безопасных ситуациях задействуется исполнительная схема 18, подающая аудиовизуальный сигнал водителю и индицирующая рекомендуемую скорость:
для исключения вероятности заноса и опрокидывания на повороте;
для обеспечения движения по условиям сопротивления качению и подъему (в данном случае еще выдается информация о рекомендуемой передаче в коробке передач);
для поддержания целевых дистанций в колонне в случаях:
- сближения транспортных средств (для исключения столкновения). При этом впереди идущему транспортному средству в зависимости от ситуации подается сигнал об увеличении скорости, а последующему -о снижении;
- увеличения дистанции между транспортными средствами, вследствие снижения скорости движения какого-либо участника колонны в особых условиях. При этом информируемому транспортному средству сообщается дополнительная информация о положении снижающих скорость транспортных средств в колонне относительно информируемого (какой по счету впереди или сзади).
Характер аудиовизуальной сигнализация при выдаче рекомендаций отличается при реальном и прогнозируемом состоянии колонны.
В более опасной ситуации, кроме исполнительной схемы 18 задействуется исполнительная схема 19, управляющая подачей топлива и позволяющая путем ее (подачи) снижения обеспечить режим торможения двигателем, независимо от действий водителя. В случаях наиболее опасного сближения транспортных средств, кроме исполнительных схем 18 и 19, задействуется исполнительная схема 20 в тормозной системе, позволяющая обеспечить необходимый уровень замедления транспортного средства, независимо от действий водителя. Вместе с тем, на основании анализа информации о значении интенсивности сближения с впереди идущим транспортным средством, получаемой от подсистемы 2 измерения дистанции до впереди идущего транспортного средства, а также информации о величине подъема, получаемой от подсистемы 3 измерения ускорений и уклонов, в случае воздействия при этом водителя на орган подачи топлива и рулевой управляющий орган (при необходимости совершения маневра с целью исключения столкновения с внезапно остановившемся или скатывающимся (сползающим) назад впереди идущим транспортным средством), информация о котором поступает в подсистему 21 анализа действий водителя от подсистемы 22 контроля положения органов управления, действие исполнительных схем 19 и 20 исключается.
В ходе движения колонны в транспортном потоке существует вероятность встраивания в колонну посторонних транспортных средств. Идентификация встраивания в состав колонны постороннего транспортного средства, не являющегося участником колонны и необорудованного БЭСУ, осуществляется как возникновение движущегося препятствия, расстояние до которого от рассматриваемого транспортного средства колонны определяется подсистемой 2 измерения дистанции. При этом подсистемой 2 измерения дистанции определяется расстояние от рассматриваемого транспортного средства колонны до впереди идущего транспортного средства колонны, оборудованного БЭСУ, между которыми произошло встраивание постороннего транспортного средства. На основании информации подсистемы 1 навигации и подсистемы 2 измерения дистанции, поступающей в подсистему 8 идентификации состояния колонны производится расчет дистанции между посторонним транспортным средством и участниками колонны, между которыми произошло встраивание, определяется длина постороннего транспортного средства, Полученные сведения вносятся в пополняемую базу данных 16 для корректировки длины и других эталонных значений параметров колонны.
Нейронная сеть позволяет прогнозировать будущую дистанцию между транспортными средствами через различные промежутки времени (представляются оптимальными промежутки 10, 5 и 2 секунды).
Прогнозирование на длительный промежуток (10 секунд) позволяет БЭСУ точно и заблаговременно формировать рекомендации по выбору скоростного режима транспортных средств в соответствии с условиями движения путем аудиовизуального оповещения водителя и при необходимости плавно регулировать скорость транспортного средства путем управления подачей топлива, с целью выдерживания заданной безопасной дистанции и скорости колонны. Прогнозирование на более короткий промежуток (5 секунд) позволяет БЭСУ предупреждать водителя посредством аудиовизуальной сигнализации о вероятной аварийной ситуации и при необходимости реагировать на предупреждение интенсивного сближения транспортных средств при движении в колонне путем автоматического ограничения подачи топлива. Прогнозирование на короткий промежуток времени (2 секунды), позволяет БЭСУ автоматически реагировать в аварийных ситуациях - отключать подачу топлива и при необходимости, в случае отсутствия действий водителя по маневрированию -использовать тормозную систему для планового или экстренного торможения.
Нейронная сеть производит прогнозирование на основе множества входных параметров (от 2 до 100 и более). На этапе настройки (обучения) нейронной сети определяются весовые коэффициенты входных параметров. Наиболее важными являются следующие параметры: текущая дистанция до впереди идущего транспортного средства, скорость транспортного средства, расстояние между первым и последним транспортными средствами колонны, перепад высот между данным транспортным средством и впереди идущим. Менее важными являются параметры рельефа, состояния ОП, кривизны маршрута, дистанции между другими транспортными средствами колонны, не находящимися непосредственно перед рассматриваемым транспортным средством.
Радиальная нейронная сеть, согласно своему принципу действия, определяет расстояния («радиусы») в многофакторном пространстве входных параметров от текущей ситуации до каждой эталонной ситуации с известными дистанциями через набор промежутков времени (10, 5, 2 секунды). Запоминание множества эталонов производится как на предварительном этапе обучения нейронной сети (на основе эксперимента по движению колонны или компьютерного моделирования), так и на этапе движения AT в колонне, к множеству эталонов добавляются «текущее» подмножество эталонов, которые фиксируются в процессе движения колонны по текущим дорожно-грунтовым условиям. Чтобы прогноз учитывал, как постоянно хранимые в памяти эталоны, так и непрерывно обновляющиеся эталоны, производится усреднение с определенными весовыми коэффициентами (в частности, одинаковыми и равными 0,5) результатов прогнозирования дистанции до впереди идущего транспортного средства.
В результате достигается:
1. Обеспечение безопасности движения колонны за счет:
наличия возможности осуществления водителем маневра при резкой остановке или скатывании (сползании) назад при движении на подъеме впереди идущего транспортного средства путем исключения действия при этом исполнительных схем, оказывающих воздействие на подачу топлива и торможение;
прогнозирования на предстоящих участках маршрута колонны с изменяющимися рельефом, кривизной и дорожно-грунтовыми условиями критических скоростей по заносу и опрокидыванию;
2. Поддержание заданной длины колонны, исключение ее разрыва или растягивания при преодолении участков пути с изменением состояния опорной поверхности, рельефа и кривизны маршрута за счет прогнозирования состояния параметров колонны по показателям тягово-скоростных характеристик, критических скоростей по заносу и опрокидыванию всех транспортных средств колонны и информирования водителей о выборе оптимального и безопасного режима движения. При этом осуществляется информирование первого и последующих транспортных средств колонны о завершении преодоления труднопроходимых участков всеми транспортными средствами колонны, в том числе и замыкающим, для выбора оптимального момента времени увеличения скорости движения (перехода на высшую передачу) во избежание растягивания колонны.
3. Корректировка задаваемых параметров колонны с учетом встраивания в колонну посторонних транспортных средств, не являющихся участниками колонны и необорудованных БЭСУ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ВОЕННОЙ АВТОМОБИЛЬНОЙ ТЕХНИКИ В СОСТАВЕ КОЛОННЫ С УЧЁТОМ СОСТОЯНИЯ ОПОРНОЙ ПОВЕРХНОСТИ | 2020 |
|
RU2746046C2 |
| Способ дистанционного управления автономным движением колонн и/или беспилотных транспортных средств (БТС) интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2018 |
|
RU2712715C1 |
| Способ управления движением беспилотных транспортных средств (БТС) в колонне и/или отдельных БТС и мониторинга интеллектуальной транспортной инфраструктурой (ИТИ) сети автомобильных дорог | 2019 |
|
RU2725569C1 |
| Способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны на территориях с холодным климатом | 2018 |
|
RU2690143C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕЕЗДЕ | 2018 |
|
RU2681451C1 |
| Способ прогностического иерархического управления интеллектуальной транспортной системой при управлении движением колонны | 2020 |
|
RU2750942C1 |
| Способ оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда, и устройство для оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда | 2023 |
|
RU2809391C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ НА УЧАСТКАХ ДОРОГ ВНЕ НАСЕЛЕННЫХ ПУНКТОВ | 2021 |
|
RU2770723C1 |
| СИСТЕМА АКТИВНОЙ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2023 |
|
RU2815561C1 |
| СПОСОБ И УСТРОЙСТВО СВЕТОВОЙ СИГНАЛИЗАЦИИ В АВТОМОБИЛЕ | 2000 |
|
RU2174922C1 |
Изобретение относится к способу управления движением автомобильной техники (AT) в составе колонны с учетом состояния опорной поверхности, рельефа и кривизны маршрута. Способ заключается в управлении исполнительными схемами AT и индикацией для реагирования водителем. Управление заключается в выдерживании постоянного расстояния между AT в составе колонны с прогнозированием наиболее вероятного состояния колонны, через определенный интервал времени с помощью искусственной радиальной нейронной сети и базы данных о предыдущих и последующих состояниях колонны на основе регулярного измерения исходных данных для прогнозирования. Данные для прогнозирования содержат: координаты от подсистемы навигации, дистанцию до впереди идущего транспортного средства, скорость транспортного средства, компоненты ускорений и наклонов транспортного средства, параметры рельефа и реологического состояния опорной поверхности. При этом заданные параметры колонны корректируются с учетом встраивания в состав колонны посторонних транспортных средств, не являющихся участниками колонны и необорудованных бортовой электронной системой управления. Достигается обеспечение безопасности движения колонны. 1 ил.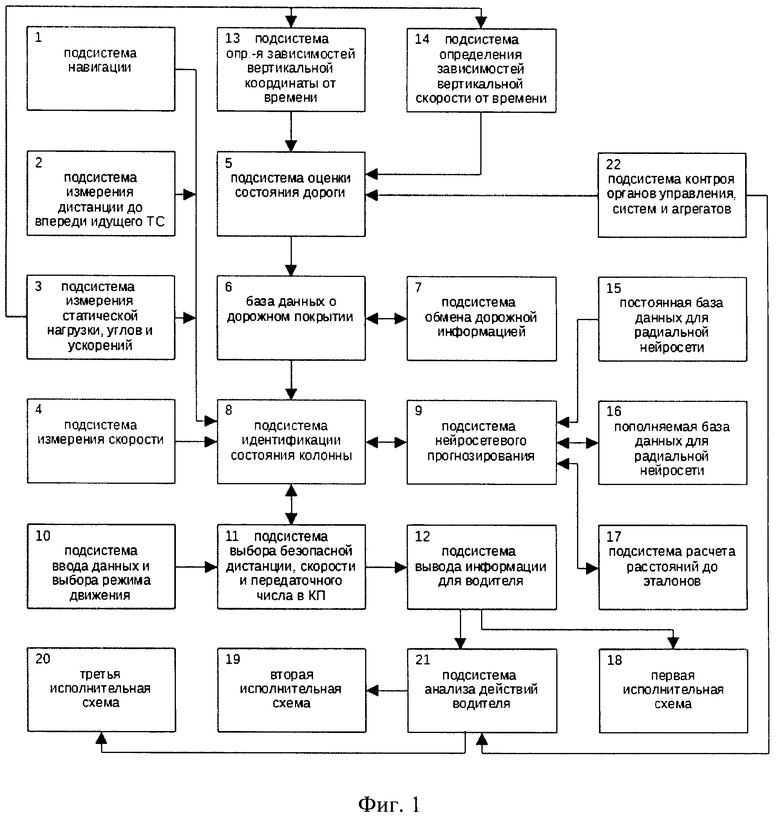
Способ управления движением автомобильной техники (AT) в составе колонны с учетом состояния опорной поверхности, рельефа и кривизны маршрута, заключающийся в управлении исполнительными схемами AT и индикацией для реагирования водителем по критерию выдерживания постоянного расстояния между AT в составе колонны с прогнозированием наиболее вероятного состояния колонны через определенный интервал времени с помощью искусственной радиальной нейронной сети и базы данных о предыдущих и последующих состояниях колонны на основе регулярного измерения исходных данных для прогнозирования: координат от подсистемы навигации, дистанции до впереди идущего транспортного средства, скорости транспортного средства, компонентов ускорений и наклонов транспортного средства, параметров рельефа и реологического состояния опорной поверхности, отличающийся прогнозированием параметров колонны по критериям обеспечения безопасности и возможности движения каждого транспортного средства в колонне в заданных условиях путем определения показателей тягово-скоростной характеристики, критических скоростей по заносу и опрокидыванию, а также информированием водителей каждого транспортного средства о выборе оптимального и безопасного режима движения по заданным параметрам колонны на основании анализа действий водителя, направленных на соответствие безопасному и оптимальному прогнозируемому режиму движения, при этом заданные параметры колонны корректируются с учетом встраивания в состав колонны посторонних транспортных средств, не являющихся участниками колонны и необорудованных бортовой электронной системой управления.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ВОЕННОЙ АВТОМОБИЛЬНОЙ ТЕХНИКИ В СОСТАВЕ КОЛОННЫ С УЧЁТОМ СОСТОЯНИЯ ОПОРНОЙ ПОВЕРХНОСТИ | 2020 |
|
RU2746046C2 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНЫХ СРЕДСТВ В КОЛОННЕ | 2004 |
|
RU2292564C2 |
| 0 |
|
SU158143A1 | |
| US 9494944 B2, 15.11.2016. | |||

