Изобретение относится к электротехнике, а именно к области управления пуском асинхронного двигателя с фазным ротором.
Известен способ управления асинхронным двигателем с фазным ротором, в соответствии с которым обмотку статора двигателя питают от вентильного регулятора напряжения, а в обмотке ротора поддерживают постоянство тока с помощью подключаемого к обмотке ротора мостового выпрямителя и соединенного с ним через резистор параметрического стабилизатора тока. При управлении двигателем изменяют напряжение, подводимое к обмотке статора двигателя от регулятора напряжения [1].
Недостатками данного способа являются неэкономичность, вследствие больших потерь энергии на резисторе, включенном в цепь постоянного тока, сложность регулирования момента двигателя, т.к. параметрический стабилизатор тока, выполненный на базе резонансных L-C контуров, не способен плавно регулировать ток ротора двигателя.
Наиболее близким к изобретению является способ управления асинхронным двигателем с фазным ротором, в соответствии с которым подают в обмотку статора переменное напряжение, выпрямляют с помощью регулируемого выпрямителя напряжение сети, выпрямляют с помощью нерегулируемого выпрямителя напряжение, снимаемое с выводов обмотки ротора двигателя, эти выпрямленные напряжения суммируют и подают на вход инвертора, полученное с выхода инвертора переменное напряжение трансформируют по амплитуде и подают в обмотку статора двигателя, задают желаемое значение тока на входе инвертора, измеряют величину тока на входе инвертора, сравнивают заданное и измеренное значения этих токов, регулируют напряжение на выходе регулируемого выпрямителя так, чтобы поддерживать заданное значение тока на входе инвертора [2].
Недостатками данного способа являются сложность реализации, т.к. в силовой схеме требуется три силовых мостовых вентильных элемента, при этом требуется две системы управления: регулируемым выпрямителем и инвертором, повышенная установленная мощность всех элементов системы, т.к. поток энергии, поступающий в обмотку статора, проходит через все вентильные элементы и трансформатор, вследствие чего также возрастают потери при пуске двигателя, большое потребление реактивной мощности из питающей сети регулируемым выпрямителем при регулировании угла управления питающим выпрямителем.
Целью изобретения является упрощение процесса ограничения и автоматической стабилизации пускового тока и момента асинхронного двигателя с фазным ротором при пуске.
В предлагаемом способе управления асинхронным двигателем с фазным ротором подают в обмотку статора двигателя переменное напряжение, выпрямляют с помощью нерегулируемого выпрямителя напряжение, снимаемое с выводов обмотки ротора двигателя, фильтруют его и подают на вход инвертора, переменное напряжение с выхода инвертора подают на индуктивно-активную нагрузку, задают желаемое значение выпрямленного тока ротора двигателя, измеряют величину выпрямленного тока ротора двигателя, определяют величину рассогласования между заданным и измеренным значениями этих токов, регулируют частоту тока на выходе инвертора, так чтобы поддерживать заданное значение выпрямленного тока ротора двигателя.
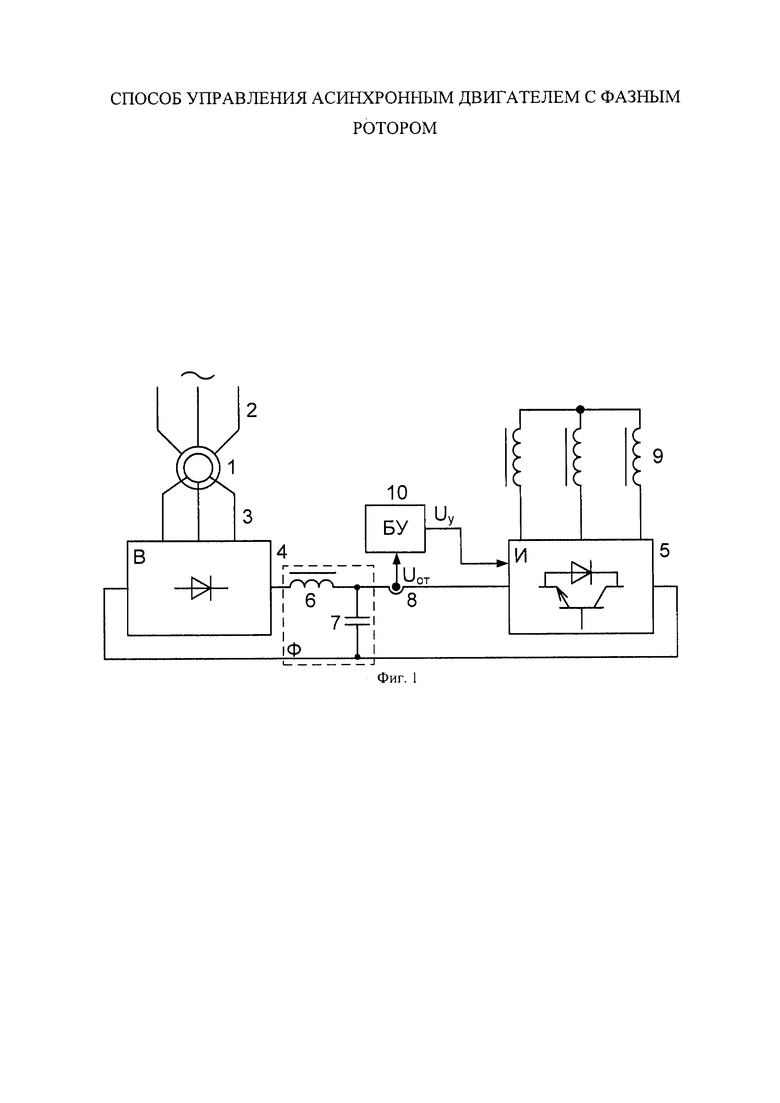
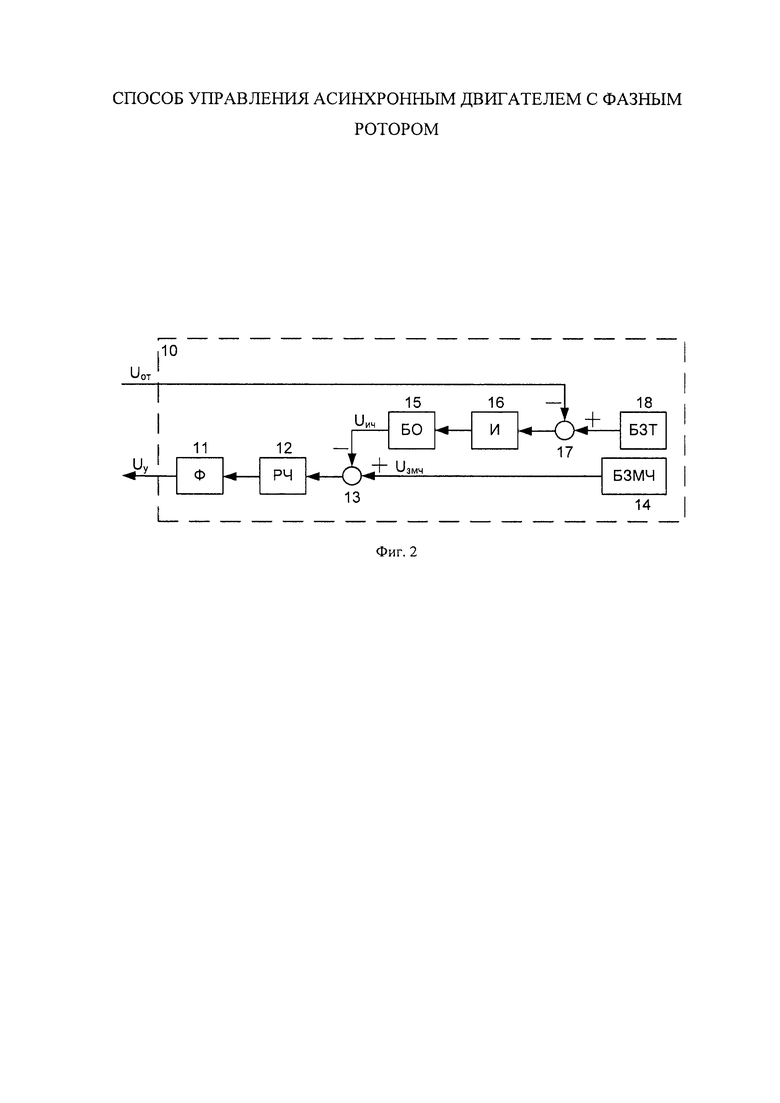
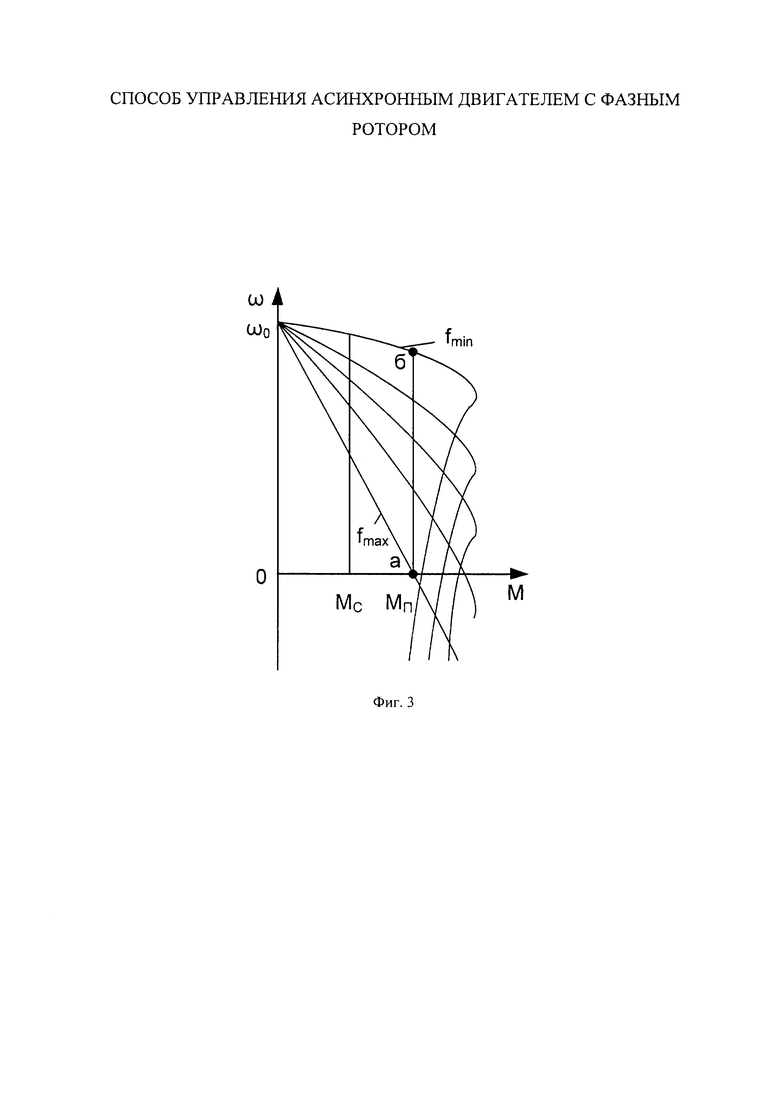
На фиг. 1 показана схема устройства, реализующего предложенный способ управления асинхронным двигателем с фазным ротором; на фиг. 2 показана схема управления инвертором; на фиг. 3 приведены статические механические характеристики электропривода, управляемого согласно предложенному способу, полученные на математической модели при фиксированных значения частоты выходного тока инвертора и при автоматическом регулировании частоты выходного тока инвертора.
Электропривод переменного тока содержит асинхронный двигатель с фазным ротором 1, обмотка статора 2 которого подключена к питающей сети, выводы обмоток ротора 3 подключены к входу трехфазного нерегулируемого мостового выпрямителя 4. Анодный выход нерегулируемого выпрямителя 4 соединен с катодным входом регулируемого инвертора 5. Катодный выход нерегулируемого выпрямителя 4 соединен с одним выводом сглаживающего дросселя 6, другой вывод которого соединен с одним выводом конденсатора 7 и одним выводом датчика тока 8. Другой вывод конденсатора 7 соединен с анодным выходом диодного выпрямителя 4. Другой выход датчика тока 8 соединен с катодным входом инвертора 5. Сглаживающий дроссель 6 и конденсатор 7 составляют фильтр. К фазным выходам инвертора 5 подключены первые выводы фазных обмоток реактора 9, вторые выводы которых соединены в общую точку, управляющий вход инвертора 5 соединен с выходом блока 10 управления частотой выходного тока инвертора 5, выход датчика тока 8 соединен с входом блока 10 управления частотой выходного тока инвертора 5.
Блок 10 управления частотой выходного тока инвертора 5 может быть выполнен следующим образом - он содержит формирователь сигналов 11, имеющий количество выходных каналов, соответствующее количеству ключевых элементов инвертора 5, выход формирователя сигналов 11 соединен с управляющим входом инвертора 5, вход формирователя сигналов 11 соединен с выходом регулятора 12 частоты переменного тока на выходе инвертора, вход которого соединен с выходом первого узла сравнения 13, положительный вход которого соединен с блоком задания максимальной частоты 14, а отрицательный вход первого узла сравнения 13 соединен с выходом блока ограничения 15, вход которого соединен с выходом интегрального блока (регулятора тока) 16, вход которого соединен с выходом второго узла сравнения 17, положительный вход которого соединен с блоком задания выпрямленного тока 18, а отрицательный вход второго узла сравнения 17 соединен с выходом датчика тока 8.
Электропривод переменного тока работает следующим образом.
При подаче напряжения на обмотку статора 2 в обмотке ротора 3 наводится ЭДС, выпрямленное выпрямителем 4 напряжение поступает на вход инвертора 5. В системе управления инвертором 5 на положительный вход первого узла сравнения 13 поступает сигнал от блока задания максимальной частоты 14, в начальный момент времени на отрицательный вход первого узла сравнения 13 от интегрального блока (регулятора тока) 16 через блок ограничения 15 поступает нулевой сигнал. Результирующий сигнал задания на частоту выходного тока обеспечит максимальную частоту тока на выходе открывшегося инвертора 5, при этом индуктивное сопротивление реактора 9 будет максимальным. После открытия инвертора 5, по цепи, состоящей из обмотки ротора 3, нерегулируемого выпрямителя 4, сглаживающего дросселя 6, датчика тока 8, регулируемого инвертора 5, реактора 9, начинает протекать ток, так же происходит заряд конденсатора 7.
Ток в выпрямленной цепи можно рассчитать по формуле
где Edp - приведенная к выпрямленной цепи ЭДС ротора; Edи - противо-ЭДС инвертора в выпрямленной цепи; Rd - суммарное сопротивление, приведенное к цепи постоянного тока; ΔUB∑ - суммарное падение напряжения на вентилях схемы.
где R2 - активное сопротивление обмотки ротора; Х2 - индуктивное сопротивление обмотки ротора; S - скольжение; RДР - активное сопротивление сглаживающего дросселя; RP - активное сопротивление фазы обмотки реактора (при трехфазной мостовой схеме инвертора).
Противо-ЭДС инвертора, в первом приближении, численно равна падению напряжения на индуктивном сопротивлении реактора 9.
При изменении частоты fИ на выходе инвертора изменяется индуктивная составляющая сопротивления реактора, равная
ХР=2π⋅LP⋅fи,
соответственно, изменяется величина противо-ЭДС инвертора
где kCX - коэффициент приведения напряжения мостовой схемы к цепи постоянного тока.
При прохождении тока в выпрямленной цепи через датчик тока 8, сигнал UОТ с датчика тока 8 поступает на отрицательный вход второго узла сравнения 17, а от блока задания выпрямленного тока 18 поступает сигнал UЗТ на положительный вход узла сравнения 17. Сигнал рассогласования ΔUT=UЗТ-UОТ поступает на вход интегрального блока 16, который вырабатывает сигнал желаемого изменения частоты UИЧ, этот сигнал ограничивается блоком ограничения 15. По мере разгона асинхронного двигателя 1 происходит уменьшение ЭДС ротора, поэтому для поддержания постоянства тока ротора необходимо уменьшать частоту на выходе инвертора 5, вследствие чего уменьшается индуктивное сопротивление реактора 9, влияющее на результирующее сопротивление в цепи ротора. Необходимый темп уменьшения частоты на выходе инвертора в процессе пуска задают исходя из желаемого темпа разгона электропривода, путем соответствующей настройки постоянной времени интегрального блока 16.
При изменении скорости асинхронного двигателя 1 в процессе пуска на первом узле сравнения 13 производится сравнение сигнала задания максимальной частоты UЗМЧ, поступающего с блока 14, и сигнала желаемого изменения частоты UИЧ, определяется рассогласование ΔUЧ=UЗМЧ-UИЧ. Блок 15, ограничивающий сигнал UИЧ, настраивают так, чтобы сигнал ΔUЧ на входе блока 12 был всегда положительным.
Если, например, при разгоне асинхронного двигателя 1 ток в выпрямленной цепи начинает превышать заданное блоком 18 значение, сигнал ΔUT=UЗТ-UОТ становится отрицательным, снижаются сигналы на выходах интегрального блока 16, затем блока ограничения 15 и на отрицательном входе первого блока сравнения 13, а сигнал на входе регулятора частоты 12 возрастает, частота на выходе инвертора возрастает, индуктивная составляющая сопротивления реактора 9 возрастает, поэтому ток в выпрямленной цепи приближается к заданному значению.
После достижения двигателем скорости, близкой к скорости на естественной механической характеристике, частота тока на выходе инвертора 5 устанавливается минимальной, или равной нулю, для этого открывают только два ключевых вентильных элемента - один в анодной, а другой в катодной группах вентилей инвертора 5, и по двум фазным обмоткам реактора 9 будет протекать постоянный ток, в этом случае добавочное сопротивление, введенное в цепь ротора асинхронного двигателя 1, будет минимальным.
Для получения пониженной скорости вращения асинхронного двигателя 1 необходимо устанавливать соответствующую частоту тока на выходе инвертора 5, что показывают механические характеристики, приведенные на фиг. 3, где характеристика, показанная линией "аб", получена при поддержании в процессе пуска постоянства выпрямленного тока ротора.
Преимущество предлагаемого способа управления асинхронным двигателем с фазным ротором заключается в простоте реализации, т.к. регулируется только одна переменная - частота тока на выходе инвертора. При построении замкнутого контура регулирования тока в выпрямленной цепи обеспечивается постоянство тока ротора и момента при пуске асинхронного двигателя.
Источники информации
1. Авторское свидетельство СССР №1381639. Способ управления асинхронным двигателем с фазным ротором. МКП Н02Р 7/62, 1988.
2. Авторское свидетельство СССР №2099850. Способ управления асинхронным двигателем с фазным ротором. МКП Н02Р 7/63. Опубл. 20.12.1997. Бюл. №35.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1996 |
|
RU2099850C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2015 |
|
RU2606643C1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1998 |
|
RU2160495C2 |
| Способ управления асинхронным двигателем с фазным ротором | 2022 |
|
RU2786694C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2297090C1 |
| ЭЛЕКТРОПРИВОД | 2008 |
|
RU2399149C1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2237345C2 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2474038C1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2021 |
|
RU2761868C1 |
Изобретение относится к области электротехнике и может быть использовано для управления пуском асинхронного двигателя с фазным ротором. Технический результат заключается в упрощении процесса стабилизации пускового тока и момента асинхронного двигателя с фазным ротором. В способе управления асинхронным двигателем с фазным ротором подают в обмотку статора двигателя переменное напряжение, выпрямляют с помощью нерегулируемого выпрямителя напряжение, снимаемое с выводов обмотки ротора двигателя, фильтруют его и подают на вход инвертора, переменное напряжение с выхода инвертора подают на индуктивно-активную нагрузку, задают желаемое значение выпрямленного тока ротора двигателя, измеряют величину выпрямленного тока ротора двигателя, определяют величину рассогласования между заданным и измеренным значениями этих токов, регулируют частоту тока на выходе инвертора, так чтобы поддерживать заданное значение выпрямленного тока ротора двигателя. Преимущество предлагаемого способа управления асинхронным двигателем с фазным ротором заключается в простоте реализации, т.к. регулируется только одна переменная - частота тока на выходе инвертора. 3 ил.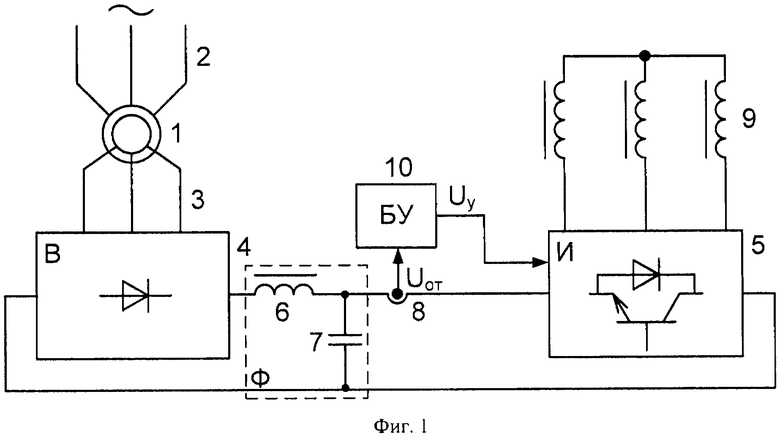
Способ управления асинхронным двигателем с фазным ротором, согласно которому подают в обмотку статора двигателя переменное напряжение, выпрямляют с помощью нерегулируемого выпрямителя напряжение, снимаемое с выводов обмотки ротора двигателя, фильтруют его и подают на вход инвертора, на выходе инвертора получают переменное напряжение, отличающийся тем, что переменное напряжение с выхода инвертора подают на индуктивно-активную нагрузку, задают желаемое значение выпрямленного тока ротора двигателя, измеряют величину выпрямленного тока ротора двигателя, определяют величину рассогласования между заданным и измеренным значениями этих токов, регулируют частоту тока на выходе инвертора так, чтобы поддерживать заданное значение выпрямленного тока ротора двигателя.
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1996 |
|
RU2099850C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 2006 |
|
RU2300169C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1999 |
|
RU2202850C2 |
| GB 1207042 A, 30.02.1970 | |||
| Прибор для измерения величины и на правления скорости потока в аэродинамической модели реки | 1955 |
|
SU108162A1 |
| JP 2006136121 A, 25.05.2006 | |||
| US 20060097689 A1, 11.05.2006 | |||
| WO 9707589 A1, 27.02.1997. | |||

