Изобретение относится к электротехнике, а именно к области управления пуском и регулирования скорости асинхронных двигателей.
Известен способ управления асинхронным двигателем, питаемым от инвертора с углом проводимости ключей 120 град. при котором задают начальную частоту питания двигателя, измеряют электрический параметр в отключенной фазе двигателя и по результату измерения формируют команду на переключение ключей инвертора, измеряют импульсы тока в отключенной от источника питания фазе двигателя, сравнивают их с заданным пороговым уровнем и при достижении импульсом тока заданного порогового уровня формируют команду на переключение ключей инвертора [1]
Недостатком данного способа является невозможность управления электромагнитным моментом двигателя, т.к. в данном способе не контролируется ток ротора или магнитный поток двигателя.
Известен также способ управления асинхронным двигателем с фазным ротором, в соответствии с которым обмотку статора двигателя питают от вентильного регулятора напряжения, а в обмотке ротора поддерживают постоянство тока с помощью подключенного к обмотке ротора мостового выпрямителя и соединенного с ним через резистор параметрического стабилизатора тока. При управлении двигателем изменяют напряжение, подводимое к обмотке статора двигателя от регулятора напряжения [2]
Недостатками данного способа являются малая надежность, т.к. используется параметрический стабилизатор тока, выполненный с помощью резонансных L-C-контуров, для которых режим холостого хода является аварийным; неэкономичность, т. к. необходим резистор с большим сопротивлением в цепи постоянного тока, на котором происходят дополнительные потери энергии; малая точность стабилизации момента двигателя, т.к. параметрический стабилизатор стабилизирует только ток ротора; сложность регулирования момента двигателя, т.к. параметрический стабилизатор не может плавно регулировать ток ротора двигателя.
В предлагаемом способе управления асинхронным двигателем с фазным ротором регулируют скорость двигателя, изменяя с помощью трехфазного преобразователя частоты со звеном постоянного тока, состоящего из инвертора и регулируемого выпрямителя, частоту напряжения, подведенного к обмоткам статора двигателя, причем напряжение, полученное с выхода инвертора, трансформируют по амплитуде и подают на обмотку статора двигателя, выпрямляют напряжение, снимаемое с выводов обмоток ротора двигателя, а подают его последовательно и согласно с напряжением, полученным от регулируемого выпрямителя, задают желаемое значение тока на входе инвертора, измеряют величину тока на входе инвертора, сравнивают заданное и измеренное значения токов, регулируют напряжение на выходе регулируемого выпрямителя так, чтобы поддерживать заданное значение тока на входе инвертора.
В данном способе управления асинхронным двигателем амплитуда тока статора поддерживается на заданном уровне в течение всего времени работы двигателя. В процессе пуска и регулирования скорости двигателя амплитуды тока ротора поддерживаются на заданном уровне, поэтому ток намагничивается, магнитный поток и момент двигателя имеют практически постоянное значение в течение всего времени пуска или регулирования скорости.
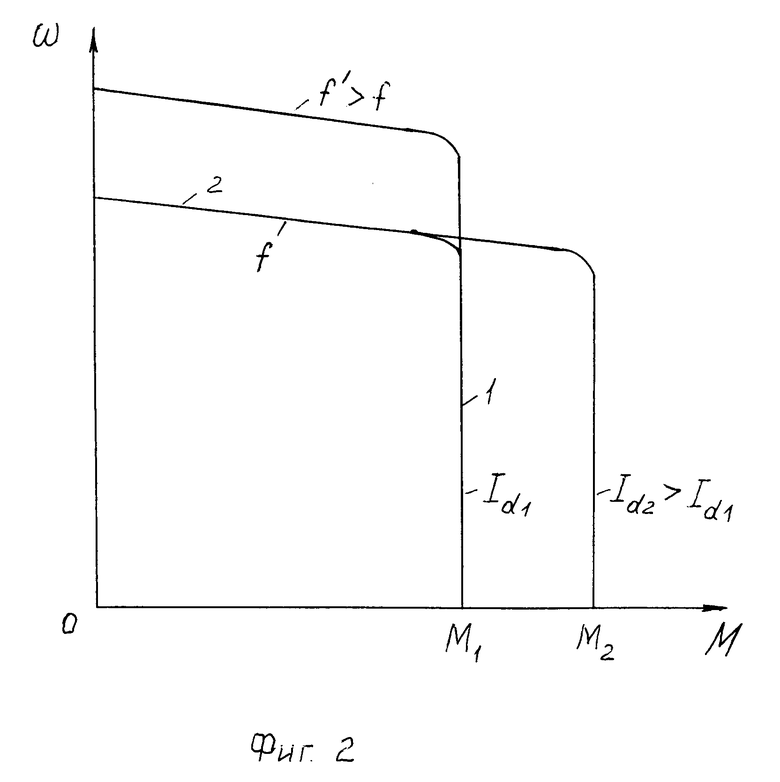
На фиг.1 показана схема устройства, реализующего предложенный способ управления асинхронным двигателем; на фиг.2 экспериментальные механические характеристики асинхронного электропривода, управляемого согласно предложенному способу.
Устройство, реализующее предложенный способ, содержит асинхронный двигатель 1 с фазным ротором, нерегулируемый выпрямитель 2, трехфазный вход которого подключен к обмоткам ротора двигателя 1, преобразователь частоты, содержащий инвертор 3 с блоком 4 задания выходной частоты, причем выход инвертора подключен к первичным обмоткам согласующего трансформатора 5, вторичные обмотки которого подключены к обмоткам статора двигателя 1, а вход инвертора 3 соединен последовательно с нерегулируемым выпрямителем 2, сглаживающим реактором 6, регулируемым выпрямителем 7, вход которого подключен к питающей сети, к управляющему входу регулируемого выпрямителя 7 подключен выход блока 8 импульсно-фазового управления выпрямителем, к входу которого подключен выход регулятора 9 входного тока инвертора, имеющего узел сравнения 10, к которому подключен выход блока задания входного тока инвертора 11 и выход датчика 12 входного тока инверторов, реализующего отрицательную обратную связь по току.
Способ управления асинхронным двигателем с фазным ротором в данном устройстве осуществляется следующим образом.
В момент пуска двигателя от блока задания 11 через регулятор тока 9 и блок 8 импульсно-фазового управления подают сигнал задания Uз на выход регулируемого выпрямителя 7. Одновременно устанавливают блоком 4 задания частоты величину выходной частоты инвертора 3. По обмоткам статора двигателя начинает протекать ток заданной частоты. В обмотках ротора двигателя наводится ЭДС и напряжение на выходе выпрямителя 2 складывается с напряжением регулируемого выпрямителя 7. За счет отрицательной обратной связи по току в цепи постоянного тока поддерживается заданная величина тока, то есть входной ток инвертора Id будет иметь заданное значение. В установившемся режиме при неизменном значении тока Id можно записать баланс напряжений в цепи постоянного тока:
Id = K
где E2к ЭДС неподвижного ротора; S скольжение двигателя;
Uв напряжение на выходе регулируемого выпрямителя; DUΣ падение напряжения в вентилях схемы; Rэ эквивалентное сопротивление всех элементов, приведенное к цепи постоянного тока; K
X
R
где  индуктивное сопротивление обмотки статора двигателя, приведенное к ротору,
индуктивное сопротивление обмотки статора двигателя, приведенное к ротору,
X2 индуктивное сопротивление обмотки ротора двигателя;
X1т индуктивное сопротивление первичной обмотки трансформатора;
X2т индуктивное сопротивление вторичной обмотки трансформатора;
Kт коэффициент трансформации трансформатора, для повышающего трансформатора 
 активное сопротивление статора двигателя, приведенное к ротору;
активное сопротивление статора двигателя, приведенное к ротору;
R2 активное сопротивление ротора двигателя;
Ke коэффициент трансформации двигателя 
Rd активное сопротивление сглаживающего реактора;
R1т -активное сопротивление первичной обмотки трансформатора;
R2т активное сопротивление вторичной обмотки трансформатора.
Регулируемый выпрямитель 7 подключен к сети напрямую, сеть считаем бесконечно мощной и ее сопротивлением пренебрегаем. Если между сетью и регулируемым выпрямителем поставить согласующий трансформатор, то его сопротивление можно будет учесть в формуле (2).
На пусковом участке механической характеристики (фиг.2, линия 1) при больших скольжениях двигателя ЭДС обмотки ротора велика E2 E2к•S. Нерегулируемый диодный выпрямитель 2 работает в режиме, при котором осуществляется нормальная поочередная коммутация диодов. При изменении скольжения S ЭДС обмотки ротора E2 меняется, но за счет действия отрицательной обратной связи по току изменяется также Uв напряжение на выходе регулируемого выпрямителя 7 так, что ток Id остается постоянным по величине.
Согласующий трансформатор 5 служит для согласования токов статора и ротора двигателя. Ток статора равен
I1 Id•Kси•Kт, (5)
где
Kси коэффициент приведения постоянного тока к фазе двигателя.
Ток ротора I2 и приведенный ток ротора  равны
равны
I2 Id•Kсв; (6)
где Kсв коэффициент приведения постоянного тока к фазе ротора двигателя,  .
.
Если инвертор 3 и выпрямитель 2 выполнены по мостовой схеме, то можно считать Kси Kсв.
Подбирая нужный коэффициент трансформации Kт трансформатора 5, можно получить нужное соотношение между токами статора и ротора двигателя и нужный ток намагничивания I0.

Модули токов статора и ротора определяются выражениями (5) и (6), в которых ток Id является регулируемой величиной, которая определяется сигналом задания, подаваемым с блока задания 11. В цепь ротора двигателя введено эквивалентное активное сопротивление Rэ (2), оно мало изменяется при изменении скольжения двигателя. Угол Φ2 сдвига фаз между током ротора и ЭДС ротора небольшой и индуктивная составляющая тока ротора невелика. Поскольку в процессе пуска двигателя амплитуды токов статора и ротора практически постоянны, то и намагничивающий ток I0 не изменяется, тогда постоянным будет и магнитный поток Φ двигателя и соответственно практически постоянным будет и электромагнитный момент двигателя.
M = K•Φ•I2•cosΦ2 (9)
На фиг. 2 участок 1 механической характеристики, полученной экспериментальным путем, показывает, что при пуске двигатель имеет постоянный момент.
После достижения двигателем скорости, близкой к скорости на естественной характеристике, ЭДС ротора, пропорциональная скольжению, настолько снижается, что мостовой диодный выпрямитель 2 переходит в режим работы, при котором одновременно открыты четыре диода, которые находятся в проводящем состоянии, то есть обмотка ротора двигателя находится практически в закороченном состоянии. В этом случае двигатель работает на участке 2 механической характеристики (фиг.2), здесь механическая характеристика двигателя близка к естественной. При этом ток ротора двигателя I2 определяется величиной нагрузки на его валу, чем меньше нагрузка, тем меньше ток ротора. В соответствии с выражением (8) возрастает величина тока намагничивания. Поэтому при работе в установленном режиме с постоянной скоростью и постоянной нагрузкой можно уменьшить сигнал задания на ток U3 с помощью блока задания 11 и установить нужное значение тока статора.
Для регулирования установившейся скорости двигателя вверх от начального значения нужно с помощью блока 4 задания чистоты увеличить чистоту на выходе инвертора 3 и тем самым увеличить скорость вращения поля статора двигателя 1. После этого будет осуществляться автоматический разгон двигателя до новой скорости с постоянным моментом.
Предложенный способ управления асинхронным двигателем с фазным ротором позволяет полезно использовать энергию скольжения двигателя, передавая ее в цепь статора через звено постоянного тока. Это делает способ очень экономичным. Обеспечивается регулирование в широком диапазоне скорости и момента двигателя, при пуске двигателя поддерживается постоянство тока статора, тока ротора и момента двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1998 |
|
RU2160495C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ДВИГАТЕЛЯ ДВОЙНОГО ПИТАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2076450C1 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2237345C2 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2001 |
|
RU2213409C2 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 2017 |
|
RU2661343C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2237344C2 |
| ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2474038C1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2007 |
|
RU2342767C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2007 |
|
RU2362264C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2015 |
|
RU2606643C1 |
Использование: в электроприводах общепромышленных механизмов. Сущность. В способе управления асинхронным двигателем обмотку статора питают от инвертора. В цепи ротора последовательно включены инвертор, нерегулируемый и регулируемый выпрямители. Измеренный ток на входе инвертора сравнивают с заданным значением и по результатам сравнения регулируют напряжение на выходе регулируемого выпрямителя для уменьшения рассогласования между измеренным и заданным значениями тока на входе инвертора. Скорость регулируют изменением частоты напряжения на входе инвертора. В результате уменьшаются потери, повышаются надежность и точность стабилизации момента. 2 ил.
Способ управления асинхронным двигателем с фазным ротором, согласно которому подают в обмотку статора двигателя переменное напряжение, выпрямляют с помощью нерегулируемого выпрямителя напряжение, снимаемое с выводов обмотки ротора двигателя, и регулируют скорость двигателя, отличающийся тем, что указанное переменное напряжение подают с выхода инвертора, выпрямляют переменное напряжение питающей сети с помощью регулируемого выпрямителя, суммируют это напряжение с выпрямленным напряжением, снимаемым с выводов обмоток ротора двигателя, подают полученную сумму этих двух напряжений на вход инвертора, напряжение, полученное с выхода инвертора, трансформируют по амплитуде и подают на обмотку статора двигателя, задают желаемое значение тока на входе инвертора, измеряют величину тока на входе инвертора, сравнивают заданное и измеренное значения токов, регулируют напряжение на выходе регулируемого выпрямителя так, чтобы поддержать заданное значение тока на входе инвертора, а регулирование скорости двигателя осуществляют изменением частоты напряжения на выходе инвертора с помощью блока задания выходной частоты инвертора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1979 |
|
SU1037403A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления асинхронным двигателем с фазным ротором | 1986 |
|
SU1381679A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
