ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к системе помощи водителю для сельскохозяйственных рабочих машин.
УРОВЕНЬ ТЕХНИКИ
В DE 10147733 раскрыта система помощи водителю, которая помогает оператору сельскохозяйственной рабочей машины в оптимизации рабочих параметров рабочих механизмов. Система помощи водителю содержит блок визуального отображения, а также арифметическое логическое устройство для обработки сигналов различных датчиков. Сельскохозяйственная рабочая машина, которая выполнена в виде уборочного комбайна, содержит большое количество рабочих механизмов, напр., жатку, молотилку, механизмы разделения и по меньшей мере один механизм очистки, которые соединены с большим количеством измеряющих механизмов, способных определять рабочие параметры рабочих механизмов, а также параметры эффективности сельскохозяйственной рабочей машины, такие как потеря зерна, качество зерна и количество отходов.
Информация, которая поддается проверке с использованием измеряющих механизмов, передается в центральное арифметическое логическое устройство, которое извлекает из данных сигналов информацию, которая может быть визуализирована на устройстве отображения. Визуализированная информация содержит рабочие параметры сельскохозяйственной рабочей машины, такие как число оборотов барабана, скорость вентилятора очистки, выход убираемого материала и ширина подбарабанья, а также параметры эффективности, такие как потеря зерна из механизмов очистки и разделения. Для оптимизации различных рабочих параметров, в DE 10147733 предоставлен способ, в котором, на первом этапе способа, оператор направляет сельскохозяйственную рабочую машину через хлебостой, подлежащий уборке, со скоростью хода, которая соответствует ожидаемому выходу убираемого материала, обеспечивая за счет этого, что на уборочный комбайн в пределах некоторого периода времени воздействует приблизительно стабильное количество убираемого материала. Оператор должен ждать до тех пор, пока уборочный комбайн не достигнет состояния равновесия, в котором достигается приблизительно стабильный, хороший или плохой рабочий результат. Данный рабочий результат регистрируется, при этом он визуализируется для оператора в блоке отображения. Если рабочий результат является неудовлетворительным, оператор уборочного комбайна проделывает повторные изменения в представляющем интерес рабочем параметре рабочего механизма, и каждый раз ожидает достижения уборочным комбайном состояния равновесия при использовании модифицированного рабочего параметра. Все рабочие результаты регистрируются в качестве функции времени, позволяя за счет этого оператору идентифицировать конкретное значение рабочего параметра, при котором достигался наилучший рабочий результат. Затем данное конкретное значение используется для настройки конкретного рабочего механизма, обеспечивая за счет этого, что в конце концов достигается улучшенный рабочий результат сельскохозяйственной рабочей машины.
Способ данного типа имеет основной недостаток, что требуется относительно долгий период времени перед тем, как различные рабочие параметры уборочного комбайна будут функционировать в пределах оптимизированного диапазона параметра, поскольку раскрытая процедура настройки должна быть реализована для каждого рабочего параметра. В дополнение, в случае структурированного таким образом способа настройки, быстрое и успешное выполнение оптимизации зависит от уровня знаний оператора сельскохозяйственной рабочей машины, поскольку различные рабочие параметры влияют друг на друга через очень сложные взаимодействия.
В US 8406964 раскрыта система помощи водителю для сельскохозяйственной рабочей машины, такой как машина, раскрытая в DE 10147733, которая является интерактивной с использованием родного языка на визуальном дисплее, соединенном с арифметическим логическим устройством. Система отображает последовательность информационных экранов для содействия оператору в идентификации.
В системе, оператор идентифицирует эффективность работы, которую оператор желает улучшить, например, потерю зерна, качество зерна или количество отходов. На последующем экране, система помощи водителю в ответ предлагает один или более критериев качества. Данный критерий качества основан на рабочей эффективности, выбранной оператором. Оператор в ответ выбирает один из критериев качества. В ответ на данный выбор, система помощи водителю действует по пути критического решения и определяет новую установку параметра рабочего механизма и
предлагает данную новую установку оператору. Если оператор принимает установку, то система помощи водителю подает рабочему механизму команду новой установки и ожидает достижения системой устойчивого состояния. После того, как система достигает устойчивого состояния, система тогда запрашивает у оператора, удовлетворительно ли работает система. Если оператор указывает, что система работает неудовлетворительно…
Один недостаток данной системы помощи водителю состоит в том, что система откликается только на один критерий качества. Во многих случаях, оператор осознает, или по другим причинам хочет одновременно оптимизировать множество критериев качества. Однако, поскольку только один критерий качества может быть представлен в систему помощи водителю единовременно, невозможно за один раз оптимизировать более чем один критерий качества. В результате, водитель должен последовательно оптимизировать различные критерии качества вместо того, чтобы одновременно оптимизировать несколько критериев качества. Это задерживает оптимизацию сельскохозяйственной рабочей машины и отвлекает внимание водителя от (в данном случае) уборочного процесса.
Цель представленного изобретения, поэтому состоит в том, чтобы избежать описанных выше недостатков предшествующего уровня техники и, в частности, предоставить систему помощи водителю для оптимизации эффективности сельскохозяйственной рабочей машины, которая обеспечивает, что сельскохозяйственная рабочая машина достигает оптимизированного рабочего состояния в пределах возможного кратчайшего количества времени.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с первым аспектом изобретения, система помощи водителю для уборочного комбайна содержит ALU, выполненное с возможностью приема от оператора множества областей улучшений и с возможностью расчета на основании множества областей улучшений по меньшей мере одного регулирующего действия.
В соответствии со вторым аспектом изобретения, способ управления системой помощи водителю для уборочного комбайна включает электронное предложение множества областей улучшений, электронное получение от оператора выбранного множества областей улучшений и электронное определение на основании выбранного множества областей улучшений по меньшей мере одного регулирующего действия.
В соответствии с третьим аспектом изобретения, система помощи водителю для уборочного комбайна содержит дисплей; множество рабочих механизмов; множество датчиков; арифметическое логическое устройство, соединенное с множеством рабочих механизмов, множеством датчиков и дисплеем; при этом арифметическое логическое устройство выполнено с возможностью электронного приема от оператора уборочного комбайна множества областей улучшений; при этом арифметическое логическое устройство выполнено с возможностью определения по меньшей мере одного регулирующего действия, которое по расчетам арифметического логического устройства, должно улучшить множество областей улучшений.
По меньшей мере одно регулирующее действие может содержать множество регулирующих действий, и арифметическое логическое устройство может быть выполнено с возможностью установки приоритета отдельных регулирующих действий из множества регулирующих действий на основании степени, в которой отдельные регулирующие действия будут осуществлять большую часть из множества областей улучшений.
Арифметическое логическое устройство может быть выполнено с возможностью одновременного представления на дисплее множества областей улучшений, ранее предоставленных оператором.
Арифметическое логическое устройство может быть выполнено с возможностью представления на дисплее критериев разрешения для каждой из множество областей улучшений.
Критерии разрешения могут включать визуальные указатели, указывающие улучшение областей улучшений, и визуальные критерии, указывающие ухудшение областей улучшений.
Критерии разрешения могут включать визуальные указатели, указывающие, что область улучшений была разрешена.
Арифметическое логическое устройство может быть выполнено с возможностью определения по меньшей мере одного дополнительного регулирующего действия, которое, как рассчитывает арифметическое логическое устройство, будет улучшать множество областей улучшений, и кроме этого при этом арифметическое логическое устройство выполнено с возможностью представления одновременно на дисплее по меньшей мере одного регулирующего действия и по меньшей мере одного дополнительного регулирующего действия.
В соответствии с первым аспектом изобретения, способ управления системой помощи водителю для уборочного комбайна включает этапы электронного предложения оператору множества областей улучшений; электронного получения от оператора по меньшей мере двух выбранных областей улучшений из множества областей улучшений; электронного расчета по меньшей мере одного регулирующего действия, которое будет улучшать по меньшей мере две выбранные области улучшений; и электронного представления по меньшей мере одного регулирующего действия на электронном дисплее.
Способ может дополнительно включать этап электронного расчета по меньшей мере одного дополнительного регулирующего действия, которое будет улучшать по меньшей мере две выбранные области улучшений.
Способ может дополнительно включать этап электронного и одновременного представления на электронном дисплее по меньшей мере одного регулирующего действия и по меньшей мере одного дополнительного регулирующего действия.
Способ может дополнительно включать этап электронного определения, какое из по меньшей мере одного регулирующего действия и по меньшей мере одного дополнительного регулирующего действия будет более хорошо улучшать по меньшей мере две выбранные области улучшений, полученные от оператора.
Новые признаки, которые рассматриваются в качестве отличительных для представленного изобретения, изложены в частности в приложенной формуле изобретения. Однако, само изобретение, как и его конструкция и его способ работы, вместе с его дополнительными целями и преимуществами, будет лучше всего понятно из следующего описания конкретных вариантов осуществления при прочтении вместе с сопровождающими чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
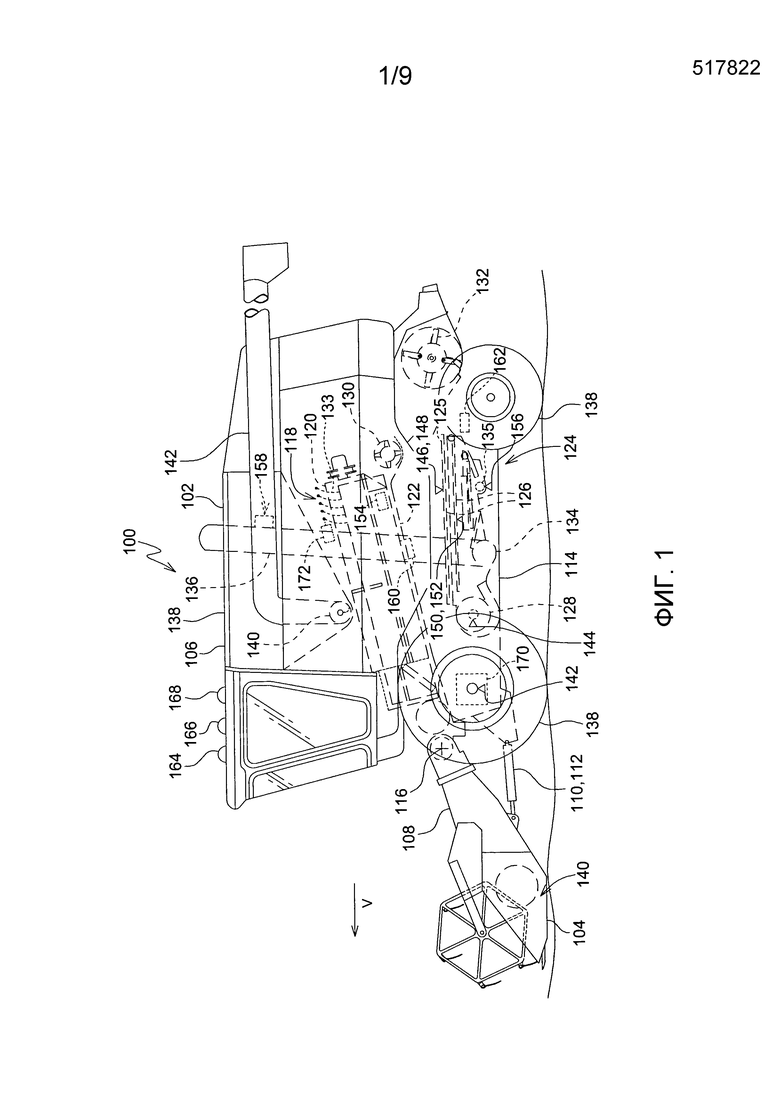
Фиг. 1 представляет собой схематичный вид сбоку сельскохозяйственной рабочей машины в соответствии с представленным изобретением.
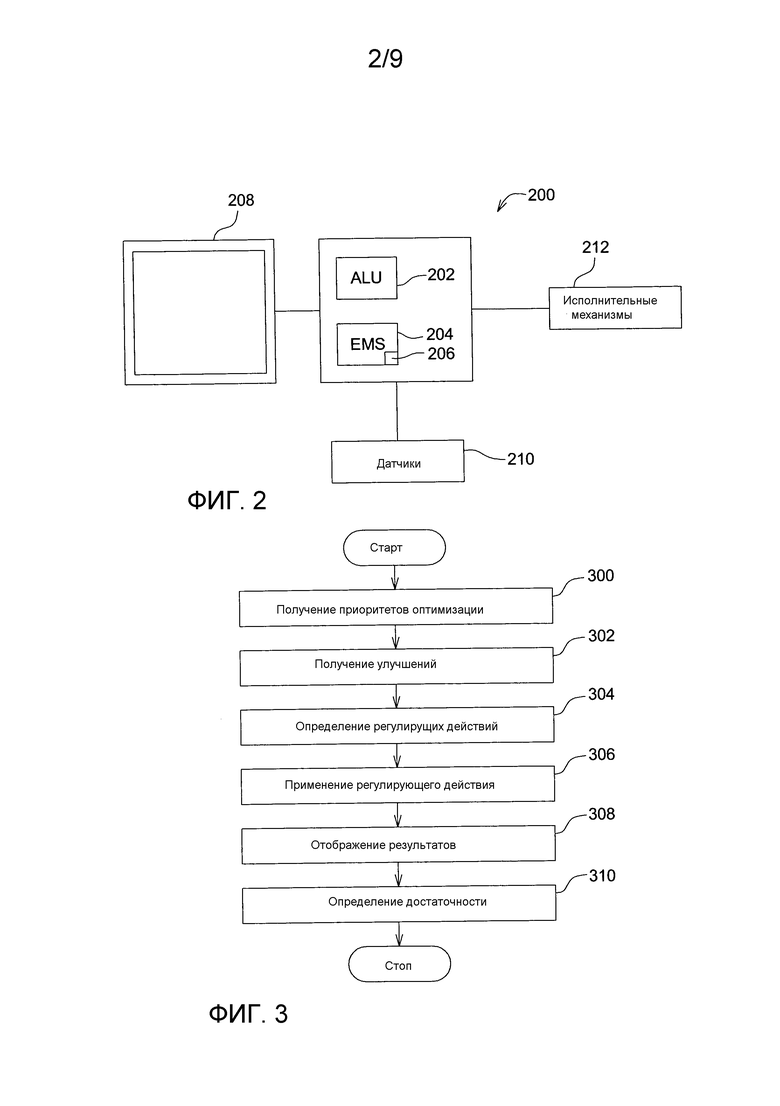
Фиг. 2 представляет собой схематичный рисунок системы помощи водителю сельскохозяйственной рабочей машины Фиг. 1 и Фиг. 2.
Фиг. 3 представляет собой блок-схему процесса, выполняемого арифметическим логическим устройством (ALU) сельскохозяйственной рабочей машины Фиг. 1 и Фиг. 2.
Фиг. 4-16 представляют собой экраны, показанные на дисплее системы помощи водителю Фигуры 2 по мере того, как она выполняет процесс Фиг. 3.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
В обсуждении в данной заявке термины «в боковом направлении», «бок о бок» и тому подобное относятся к горизонтальному направлению, которое продолжается в общем перпендикулярно направлению движения сельскохозяйственного комбайна по полю при уборке сельскохозяйственных культур. Аналогичным образом, термины «вперед», «передний» и тому подобное относятся к направлению, которое в общем параллельно направлению движения сельскохозяйственного комбайна в поле при уборке сельскохозяйственных культур.
На фиг. 1, сельскохозяйственное уборочное транспортное средство 100 содержит уборочный комбайн 102 и сельскохозяйственную уборочную насадку 104, поддерживаемую на приемной камере 108, шарнирно соединенную с передней частью уборочного комбайна 102.
Первый исполнительный механизм 110 и второй исполнительный механизм 112 соединены с приемной камерой 108 и шасси 114 уборочного комбайна 102 и между ними для поддержки над землей переднего конца приемной камеры 108 и сельскохозяйственной уборочной насадки 104.
Когда первый исполнительный механизм 110 и второй исполнительный механизм 112 выдвигаются, передний конец приемной камеры 108 и сельскохозяйственная уборочная насадка 104 поднимаются вверх, поворачиваясь по часовой стрелке (на фигуре 1) вокруг шарнирного соединения 116, которое соединяет приемную камеру 108 с шасси 114.
Уборочный комбайн 102 принимает из сельскохозяйственной уборочной насадки 104 срезанный убираемый материал, который перемещается вверх в приемную камеру 108 и транспортируется в систему 118 обмолота. Система 118 обмолота содержит ротор 120, который вращается относительно подбарабанья 122. Такое относительное движение отделяет зерно от материала, не являющегося зерном (MOG), в срезанном убираемом материале. Зерно падает вниз в систему 124 очистки.
Система 124 очистки содержит сито 125 и мякинное решето 126. Система 124 очистки также содержит вентилятор 128, который продувает воздух через сито 125 и мякинное решето 126. Данный воздух поднимает легкий MOG и переносит его назад, где он оседает на землю.
Для приема MOG, отделяемого от зерна в системе 118 обмолота в задней части системы 118 обмолота предоставлен молотильный барабан 130. Зерно, которое дополнительно отделяется от MOG в молотильном барабане 130, падает в систему 124 очистки. MOG выходит из системы 118 обмолота и транспортируется назад в измельчающее устройство 132, которое сбрасывает MOG на землю позади уборочного комбайна 102.
Над верхней поверхностью ротора 120 предоставлены лопатки 133 сортировальной машины. Лопатки 133 сортировальной машины расположены в целом по спиральному шаблону и слегка выступают из верхней поверхности ротора 120.
Функция данных лопаток состоит в том, чтобы ускорять или замедлять срезанный убираемый материал по мере того, как он проходит между ротором 120 и подбарабаньем 122 в системе 118 обмолота.
За счет увеличения угла лопаток сортировальной машины относительно ротора 120, срезанный убираемый материал быстрее транспортируется через ротор 120 и подбарабанье 122 и за счет этого подвергается меньшему обмолоту.
За счет уменьшения угла лопаток сортировальной машины относительно ротора, срезанный убираемый материал медленнее транспортируется через ротор и подбарабанье и за счет этого подвергается большему обмолоту.
Зерно, которое очищается в системе 124 очистки, падает на скатную доску, которая поддерживает расположенный в боковом направлении шнек 134 для чистого зерна, который переносит чистое зерно к одной стороне уборочного комбайна 102. Подъемное устройство 136, расположенное на этой одной стороне, принимает чистое зерно из шнека 134 и поднимает чистое зерно вверх. Также в задней части шнека 134 предоставлен шнек 135 для отходов для перемещения отходов в боковом направлении во второе вертикальное подъемное устройство (не показано), которое переносит отходы вверх к переднему концу ротора 120, где они размещаются для повторного обмолота.
Уборочный комбайн 102 закреплен на колесах 138, которые перемещают уборочный комбайн 102 по земле при уборке сельскохозяйственных культур. Колеса 138 приводятся в движение с помощью двигателей (не показано).
Для мониторинга и управления, соответственно, рабочими механизмами уборочного комбайна 102 на уборочном комбайне 102 предоставлено несколько датчиков и исполнительных механизмов.
Датчики и исполнительные механизмы включают в себя датчик 140 высоты жатки, датчик 142 скорости хода, датчик 144 скорости вентилятора, исполнительный механизм 146 положения сита, датчик 148 положения сита, исполнительный механизм 150 положения мякинного решета, датчик 152 положения мякинного решета, датчик 154 потерь сортировальной машины, датчик 156 отходов, датчик 158 качества зерна, исполнительный механизм 160 зазора молотилки, датчик 162 потери на решетном стане, датчик 164 положения транспортного средства (напр., GPS датчик), датчик 166 продольного наклона, датчик 168 крена, двигатель 170 и исполнительный механизм 172 лопаток сортировальной машины.
Датчик 140 высоты жатки определяет высоту жатки над землей и предоставляет сигнал, являющийся показателем данной высоты.
Датчик 142 скорости хода определяет скорость транспортного средства уборочного комбайна по мере того, как оно движется по полю при уборке сельскохозяйственных культур, и предоставляет сигнал, являющийся показателем данной скорости хода.
Датчик 144 скорости вентилятора определяет скорость вентилятора 128 и предоставляет сигнал, являющийся показателем скорости вентилятора.
Исполнительный механизм 146 положения сита регулирует положение планок, которые образуют сито 125. За счет изменения положения планок, можно изменять скорость и количество воздуха, который проходит через сито 125.
Датчик 148 положения сита определяет положение планок, которые образуют сито 125, и генерирует сигнал, являющийся показателем положения планок сита 125.
Исполнительный механизм 150 положения мякинного решета регулирует положение планок, которые образуют мякинное решето 126. За счет изменения положения планок, можно изменять скорость и количество воздуха, который проходит через мякинное решето 126.
Датчик 152 положения мякинного решета определяет положение планок, которые образуют мякинное решето 126, и генерирует сигнал, свидетельствующий о слабом положении мякинного решета 126.
Датчик 154 потерь сортировальной машины определяет потерю зерна в системе обмолота, и в частности зерна, которое перемещается в заднюю часть ротора 120 и подбарабанья 122.
Датчик 156 отходов выявляет количество отходов, которые принимает шнек 135 для отходов.
Датчик 158 качества зерна соединен с подъемным устройством 136 и генерирует один или более сигналов. Данные сигналы указывают качество зерна, которое может включать количество (или относительное количество) зерна, которое было поломано в процессе обмолота, загрязнения в зерне, и типы загрязнений в зерне, например, небольшой MOG (напр., мякина и шелуха), и большой MOG (напр., необмолоченное зерно, стебли, грязь и стержни початков).
Исполнительный механизм 160 зазора молотилки регулирует относительное положение подбарабанья 122 относительно ротора 120. Как правило, он соединен с подбарабаньем 122 и передвигает подбарабанье 122 вверх и вниз относительно ротора 120, изменяя за счет этого зазор между подбарабаньем 122 и ротором 120.
Датчик 162 потери на решетном стане расположен в задней части системы 124 очистки, и определяет количество зерна, которое перемещается из системы 124 очистки и укладывается на землю. В качестве альтернативы, датчик 162 потери на решетном стане может располагаться внутри системы 124 очистки и приблизительно в том же положении таким образом, что он выявляет зерно, которое сберегается, непосредственно перед тем, как MOG покидает систему 124 очистки и распределяется по земле. Количество зерна, которое сберегается в задней части системы 124 очистки, также является показателем количества зерна, которое перемещается из системы 124 очистки и укладывается на землю.
Датчик 166 продольного наклона реагирует на степень продольного наклона уборочного комбайна 102 и генерирует сигнал, свидетельствующий продольном наклоне уборочного комбайна 102.
Датчик 168 крена откликается на степень крена уборочного комбайна 102 и генерирует сигнал, свидетельствующий о крене уборочного комбайна 102.
Двигатель 170 приводит в действие колеса, которые поддерживают уборочный комбайн 102.
Со ссылкой на фигуру 2, система 200 помощи водителю содержит арифметическое логическое устройство (или «ALU») 202, электронную запоминающую схему 204, которая хранит команды, выполняемые ALU 202, и цифровые данные 206, используемые ALU 202 при обработке команд, дисплей 208, соединенный с ALU 202 и выполненный с возможностью отображения множества экранов с информацией, предоставляемой ALU 202 (показанных ниже на Фигурах 4-16). Дисплей 208 содержит устройство ввода-вывода, такое как сенсорный экран, с которым оператор может взаимодействовать для передачи команд в ALU 202 (показано ниже на Фиг. 4-16).
ALU 202 выполнено с возможностью извлечения цифровых команд и цифровых данных, хранящихся в электронной запоминающей схеме 204, с возможностью сохранения цифровых данных в электронную запоминающую схему 204, с возможностью отображения экранов с информацией на дисплее 208 и с возможностью извлечения команд оператора с дисплея 208. Цифровые команды включают команды для генерирования различных потоков и выполнения различных расчетов, названных в данной заявке. ALU соединено со всеми датчиками, названными в данной заявке (показанными на фигуре 2 в виде датчиков 210), и всеми исполнительными механизмами (включая двигатель 170), которые названы в данной заявке (показаны на фиг. 2 в виде исполнительных механизмов 212).
Фиг. 3 иллюстрирует последовательность действий, выполняемых системой 200 помощи водителю.
ALU 202 выполнено с возможностью получения на этапе 300 вводимых оператором приоритетов оптимизации. Это более подробно обсуждается в связи с Фиг. 7.
ALU 202 выполнен с возможностью получения на этапе 302 одного или более необходимых вводимых оператором улучшений. Это обсуждается более подробно в связи с Фиг. 6, 8 и 9.
ALU 202 выполнено с возможностью определения на этапе 304 одного или более регулирующих действий на основании одного или более вводимых оператором необходимых улучшений, с возможностью отображения оператору регулирующих действий и с возможностью получения подтверждения оператора для приема данных регулирующих действий. Это обсуждается более подробно ниже после обсуждения Фиг. 9 и в связи с Фиг. 10.
ALU 202 выполнено с возможностью применения на этапе 306 регулирующего действия, которое оператор подтвердил, и с возможностью ожидания до тех пор, пока система не достигнет устойчивого состояния. Это обсуждается более подробно ниже в связи с Фиг. 10-13.
ALU выполнено с возможностью отображения на этапе 308 результатов регулирующего действия. Это обсуждается более подробно ниже в связи с Фиг. 14.
ALU выполнено с возможностью определения на этапе 310, было ли достаточным регулирующее действие для соответствия одному или более необходимым улучшениям, указанным оператором на этапе 302. Это обсуждается более подробно ниже в связи с Фиг. 15.
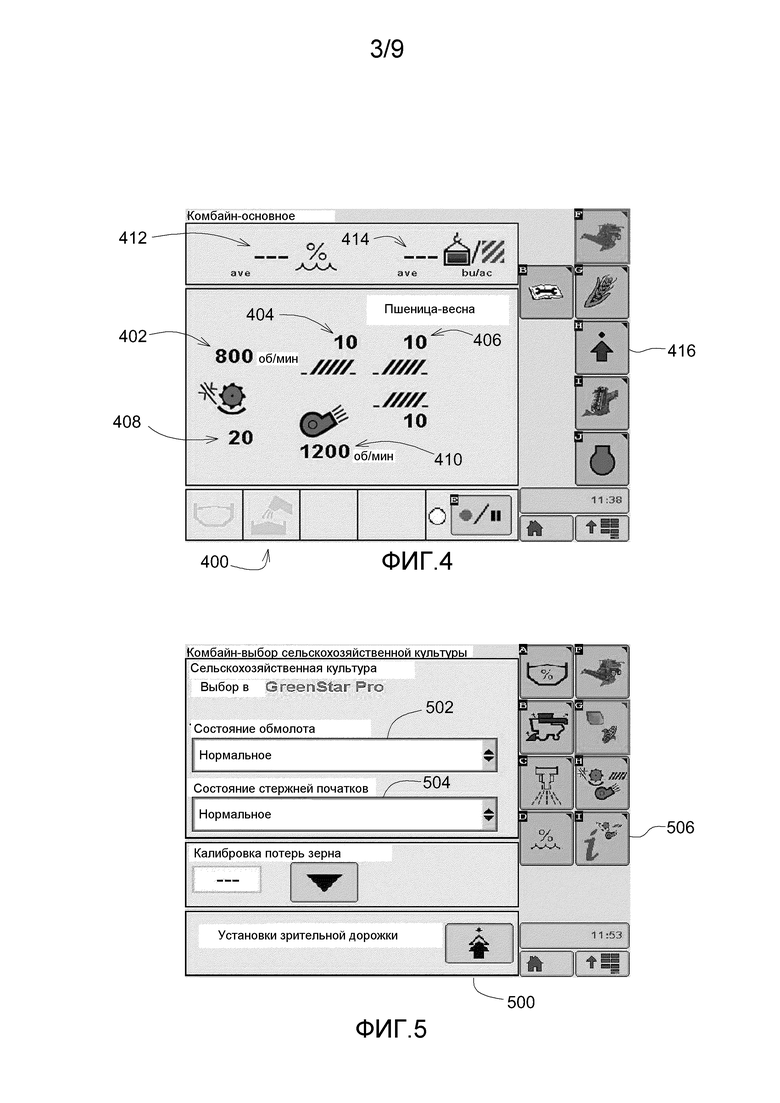
Фиг. 4 иллюстрирует первоначальный экран 400, предоставляемый ALU 202 на дисплее 208. Экран 400 предоставляется непрерывно по мере того, как сельскохозяйственное уборочное транспортное средство 100 движется по полю при уборке сельскохозяйственных культур. Экран 400 имеет несколько областей экрана, которые указывают несколько рабочих параметров сельскохозяйственного уборочного транспортного средства 100. Он также содержит несколько выбираемых областей экрана, которые оператор выбирает для указания команд оператора. Когда оператор выбирает какую-либо из выбираемых областей экрана, сигнал передается с дисплея 208 в ALU 202, указывая выбор, сделанный оператором.
Рабочие параметры, указанные ALU 202 на экране 400, включают число оборотов ротора в области 402 экрана, положение сита в области 404 экрана, положение мякинного решета в области 406 экрана, расстояние между ротором/подбарабаньем в области 408 экрана, скорость вентилятора в области 410 экрана, количество влаги в зерне в области 412 экрана и количество убираемого зерна в области 414. ALU 202 выполнено с возможностью динамического обновления данных рабочих параметров по мере того, как сельскохозяйственное уборочное транспортное средство 100 движется по полю. Данные рабочие параметры также отображаются на нескольких других экранах, генерируемых ALU 202, включая экраны, показанные на Фиг. 8, 9, 10, 11, 12, 13 и 15. Данное отображение рабочих параметров на нескольких экранах полезно по той причине, что оно обеспечивает оператору возможность быть в курсе рабочего состояния уборочного комбайна 102 во время процесса оптимизации работы уборочного комбайна 102.
Выбираемые области экрана 400 включают область 416, которую оператор выбирает для того, чтобы подать ALU 202 сигнал выполнения этапов на фиг. 3. ALU 202 выполнено с возможностью отображения экрана 500, показанного на фиг. 5, когда оператор выбирает область 416 экрана.
Фиг. 5 иллюстрирует экран 500, предоставляемый ALU 202 на дисплее 208. Данный экран позволяет оператору идентифицировать состояние обмолота и состояние соломы перед дальнейшим продолжением. Состояние обмолота, указанное на экране, сохраняется ALU 202 в электронной запоминающей схеме 204.
Оператор может изменять состояние обмолота, которое он замечает, посредством выбора области 502 экрана, которая отображается в виде раскрывающегося блока списка, указывающего множество состояний обмолота.
Состояния обмолота, отображаемые ALU 202, могут включать «нормальной», «тяжелый», «легкий», «жесткий» или «спокойный» или аналогичные слова, указывающие степень трудности, с которой сталкивается уборочный комбайн 102 при обмолоте сельскохозяйственной культуры, или объем сельскохозяйственной культуры, которая убирается в настоящее время.
Оператор может изменять состояние соломы, которое он замечает, посредством касания области 504 экрана, которая отображается в виде раскрывающегося блока списка, указывающего множество состояний соломы.
ALU 202 выполнено с возможностью сохранения данных, свидетельствующих о выборах в электронную запоминающую схему 204 для использования в последующей обработке, всякий раз, когда оператор выбирает состояние обмолота или состояние соломы.
Выбираемые области экрана включают область 506 экрана, которую оператор выбирает для того, чтобы подать ALU 202 сигнал продолжения выполнения этапов на фиг. 3. ALU 202 выполнено с возможностью отображения экрана 600 на дисплее 208, как показано на фиг. 6, когда оператор выбирает область 506 экрана.
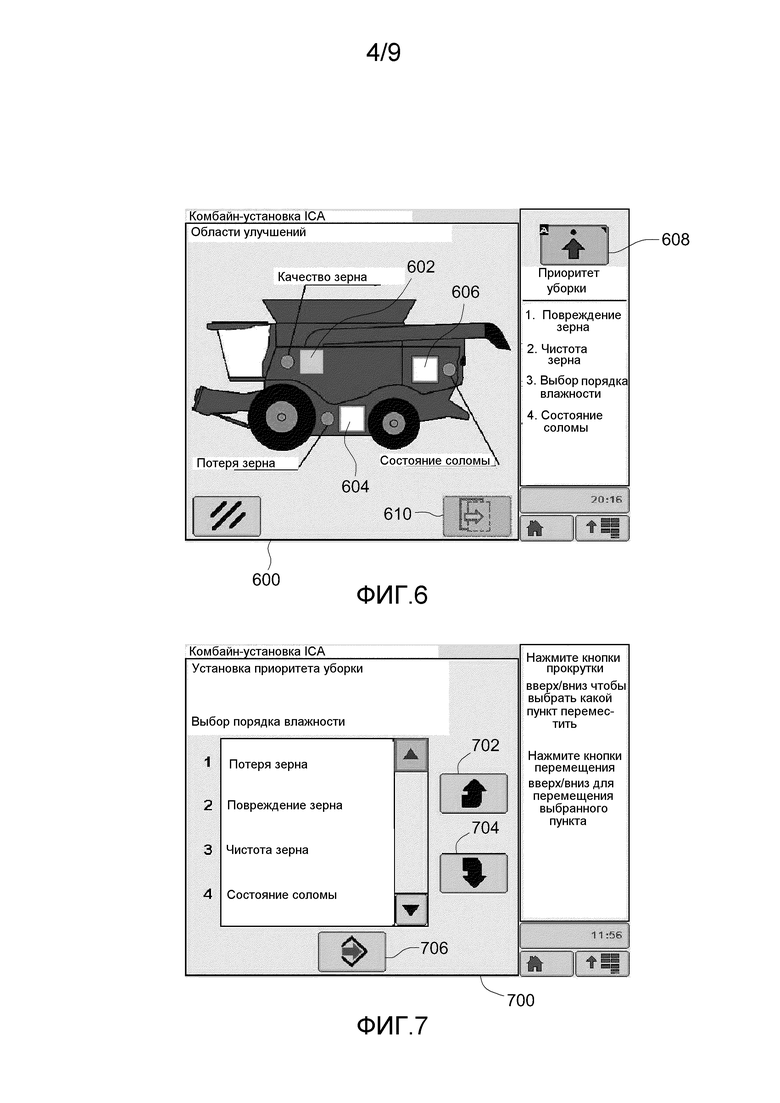
Фиг. 6 иллюстрирует экран 600. Экран 600 позволяет оператору выбирать одну или более общих областей улучшений, которые он хочет, чтобы система 200 помощи водителю сделала, в виде части процесса оптимизации. В качестве альтернативы оператор может выбрать область 608 экрана, которая позволяет ему изменять приоритеты оптимизации, используемые ALU 202, когда он выявляет регулирующее действие (или список регулирующих действий с расставленными приоритетами) для представления оператору в качестве одной или более рекомендаций.
Имеется три общие области улучшений, показанные на экране 600, которые оператор может выбрать. Данные общие области улучшений включают качество зерна, потерю зерна и состояние соломы.
Оператор может выбрать качество зерна посредством выбора области 602 экрана. Оператор может выбрать потерю зерна посредством выбора области 604 экрана. Оператор может выбрать состояние соломы посредством выбора области 606 экрана.
В качестве альтернативы, оператор может указать, что он хочет изменить приоритет оптимизации посредством выбора области 608 экрана. Если оператор выбирает область 608 экрана, в ответ ALU 202 будет генерировать экран 700, показанный на фиг. 7.
Фиг. 7 иллюстрирует экран 700, предоставляемый ALU 202 на дисплее 208. Экран 700 позволяет оператору посмотреть (а если оператор хочет изменить) приоритеты оптимизации (также называемые «приоритеты уборки»), выполняемой системой 200 помощи водителю. ALU 202 сохраняет приоритеты оптимизации в электронной запоминающей схеме 204. Приоритетами оптимизации, показанными в данном случае, являются «повреждение зерна», «потеря зерна», «чистота зерна» и «состояние соломы». Они указывают ALU 202 относительную важность факторов повреждения зерна, потери зерна, чистоты зерна и состояния соломы, когда ALU 202 определяет регулирующее действие, подлежащее выполнению.
Оператор изменяет относительные приоритеты данных факторов посредством выбора области экрана, на которой отображается название фактора. Это подает сигнал ALU 202 выделить данный фактор на экране. Выделив отдельный фактор, оператор повышает его приоритет посредством выбора области 702 экрана. Оператор уменьшает приоритет выделенного фактора посредством выбора области 704 экрана. Всякий раз, когда оператор выбирает область 702 экрана или область 704 экрана, ALU 202 в ответ изменяет порядок списка факторов, и передает список с измененным порядком на дисплей 208, обновляя соответственно экран 700. Когда оператор удовлетворен порядком приоритета факторов, он выбирает область 706 экрана. ALU 202 выполнено с возможностью реагировать на данный выбор и снова отображать экран, показанный на фиг. 6.
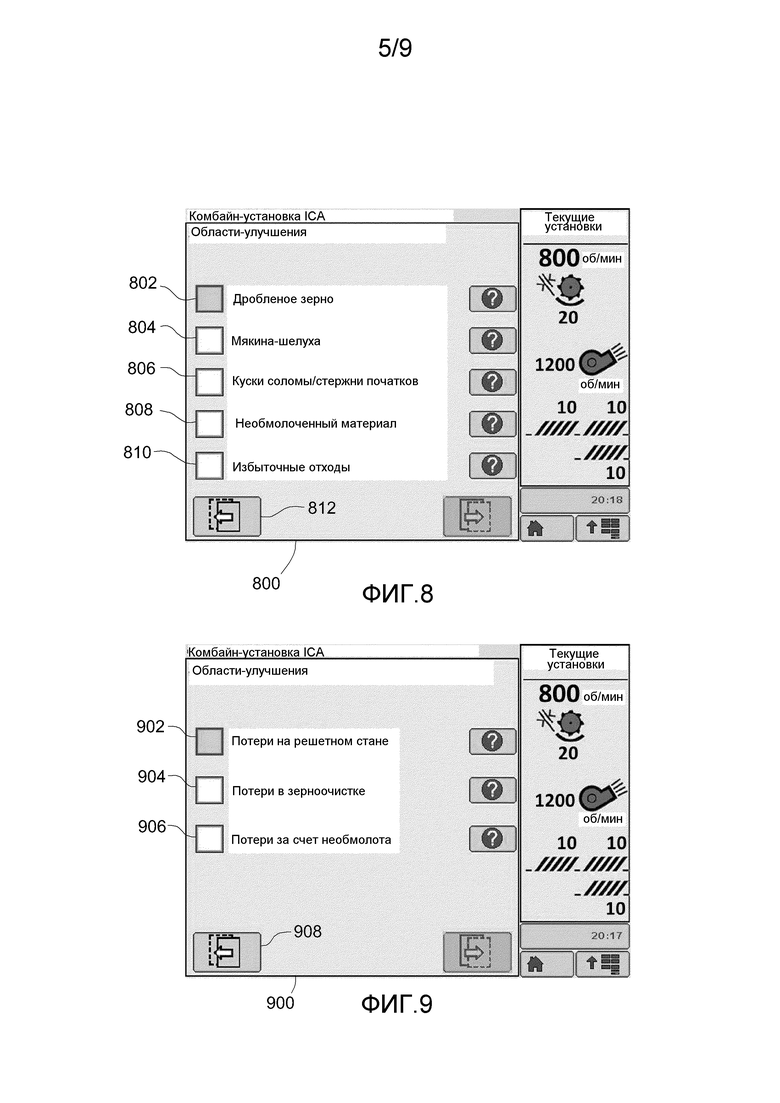
Возвращаясь назад к Фиг. 6, если оператор в качестве общей области улучшений оператора выбирает область 602 экрана, область экрана, свидетельствующую о качества зерна, ALU 202 будет в ответ генерировать экран 800, показанный на фиг. 8.
Со ссылкой на фиг. 8, экран 800 содержит список отдельных областей улучшений, которые попадают в общую область улучшений, называемую «повреждение зерна». Данные отдельные области улучшений включают разбитое зерно, мякину/шелуху, куски соломы/стержни початков, необмолоченный материал и избыточные отходы. Оператор выбирает разбитое зерно, когда он хочет уменьшить долю зерна, разбитого в процессе обмолота. Оператор выбирает мякину/шелуху, когда он хочет уменьшить количество мякины и/или шелухи (т.е. небольших кусков MOG), которая смешивается с чистым зерном после обмолота. Оператор выбирает куски соломы/стержни початков, когда он хочет уменьшить количество разорванной соломы и/или стержней кукурузных початков (напр., больших кусков MOG), которые перемешиваются с чистым зерном после обмолота. Оператор выбирает необмолоченный материал, когда он хочет уменьшить количество необмолоченного материала (напр., MOG с прикрепленным зерном) после процесса обмолота. Оператор выбирает избыточные отходы, когда он хочет уменьшить объем отходов, образующихся за счет процесса обмолота.
Оператор может выбрать любое количество данных отдельных областей улучшений посредством выбора соответствующей выбираемой области 802, 804, 806, 808 и/или 810 экрана, расположенной непосредственно слева от текстовых указаний на экране 800.
Когда оператор заканчивает выбор всех своих необходимых отдельных областей улучшений (что может включать не выбор ни одного из них) он выбирает область 812 экрана. ALU 202 выполнено с возможностью снова отображать экран 600, показанный на фиг. 6, когда оператор выбирает область 812 экрана. ALU 202 также выполнено с возможностью указывать, что оператор выбрал одну или более данных отдельных областей улучшений посредством помещения визуального индикатора (напр., галочки) в области 602 экрана 600.
Снова со ссылкой на Фиг. 6, если оператор в качестве общей области улучшений выбирает область 604 экрана, область экрана, свидетельствующую о потере зерна, ALU 202 в ответ будет генерировать экран 900, показанный на фиг. 9.
Со ссылкой на фиг. 9, экран 900 содержит список отдельных областей улучшений, которые попадают в общую область улучшений, называемую «потеря зерна». Данные отдельные области улучшений включают потерю сортировальной машины, потерю зерноочистки и потерю за счет необмолота. Оператор выбирает потерю сортировальной машины, если он хочет уменьшить количество зерна, теряемого в процессе обмолота. Данная потеря определяется датчиком 154 потерь сортировальной машины. Оператор выбирает потерю зерноочистки, если он хочет уменьшить количество зерна, теряемого зерноочисткой. Данная потеря определяется датчиком 162 потерь зерноочистки. Оператор выбирает потерю за счет необмолота, если он хочет уменьшить количество необмолоченного материала (напр., MOG с прикрепленным зерном) такой как колоски зерна или участки стержня кукурузных початков с еще прикрепленными зернами кукурузы.
Оператор может выбрать любое количество данных отдельных областей улучшений посредством выбора соответствующей выбираемой области 902, 904 и 906 экрана, расположенной непосредственно слева от текстовых указаний на экране 900. Когда оператор заканчивает выбор всех необходимых для него отдельных областей улучшений (что может включать не выбор ни одного из них), он выбирает область 908 экрана. ALU 202 выполнено с возможностью снова отображать экран 600, показанный на фиг. 6, когда оператор выбирает область 908 экрана. ALU 202 также выполнено с возможностью указывать, что оператор выбрал одну или более из данных отдельных областей улучшений за счет помещения визуального индикатора (напр., галочки) в области 604 экрана.
Снова со ссылкой на Фиг. 6, заключительной областью улучшений, которую оператор может выбрать посредством выбора области 606 экрана, является общая область состояния соломы. Состояние соломы улучшают посредством конфигурирования машины обмолачивать срезанный убираемый материал менее энергично, и за счет этого получают солому (т.е. MOG), которая в среднем имеет более большую длину. Более длинная солома в общем предпочтительнее более короткой соломы, когда фермер продает солому в качестве продукта. Отсутствуют отдельные области улучшений, образованные для состояния соломы, и вследствие этого, когда оператор выбирает область 606 экрана, дополнительный экран не отображается. Вместо этого, ALU 202 выполнено только с возможностью изменения экрана 600 за счет помещения визуального индикатора (напр., галочки) в области 606 экрана.
После того, как оператор закончил выбор всех общих областей улучшений и всех отдельных областей улучшений, которые он желает улучшить с помощью системы 200 помощи водителю, он выбирает на экране 600 область 610 экрана. Когда оператор выбирает область 610, он подает ALU 202 сигнал, что оператор закончил процесс выбора, и все области улучшений были идентифицированы.
В этот момент, ALU 202 получает все области улучшений, как общие, так и отдельные идентифицированные оператором, и сохраняет их в электронной запоминающей схеме 204 системы 200 помощи водителю. Как объяснялось выше, ALU 202 также получает данные, свидетельствующие о состоянии обмолота и состоянии соломы (см. Фиг. 5), а также приоритет оптимизации нескольких факторов (см. Фиг. 7).
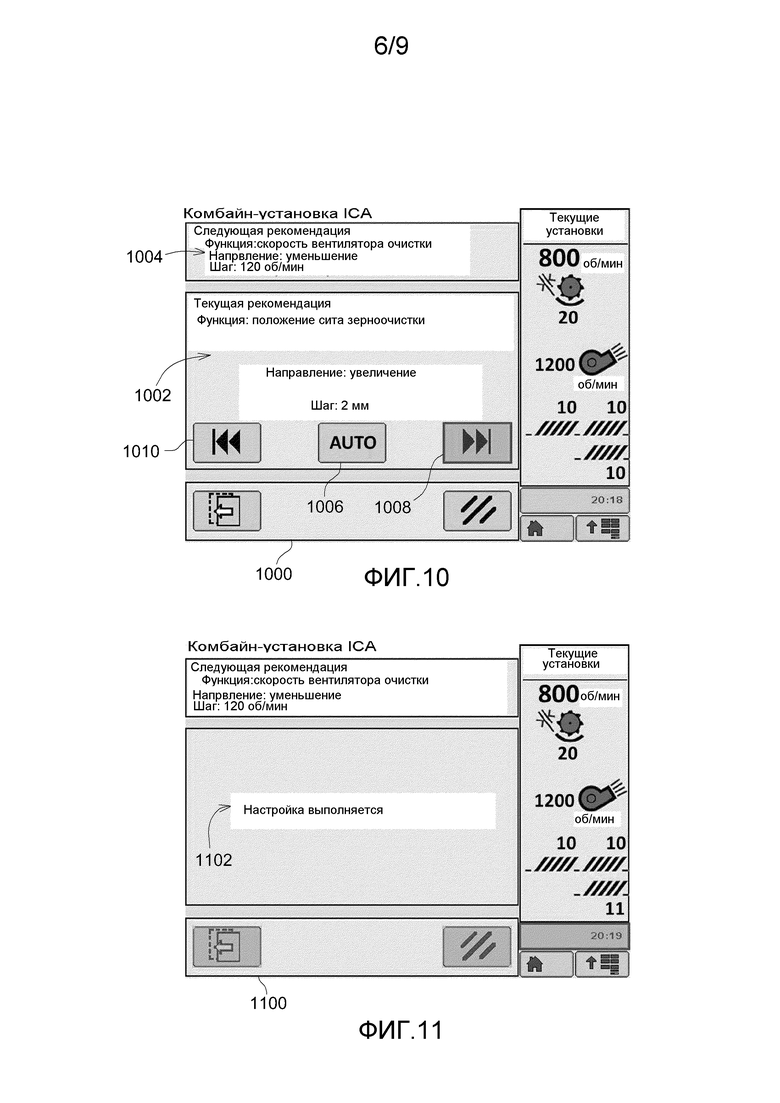
Затем ALU 202 обращается к внутренней базе данных или экспертной системе для определения нескольких регулирующих действий, которые оно может предпринять для улучшения многих (если не всех) областей улучшений, идентифицированных оператором. В качестве части данного процесса, ALU 202 предпочтительно оценивает важность некоторых из возможных регулирующих действий больше, чем других возможных регулирующих действий на основании приоритетов оптимизации, предоставленных оператором (см. Фиг. 7). Далее ALU 202 оценивает важность некоторых из возможных регулирующих действий больше, чем других возможных регулирующих действий на основании того, улучшит ли предпочтительно конкретное регулирующее действие большинство (или все) области улучшений, идентифицированные оператором. В результате данного процесса, ALU 202 создает приоритизированный список регулирующих действий. Когда данный процесс заканчивается, ALU 202 предоставляет оператору экран, такой как экран 1000, показанный на фиг. 10 на дисплее 208.
На фиг. 10, экран 1000 в качестве рекомендации показывает наиболее предпочтительное регулирующее действие в области 1002 экрана. Данная рекомендация включает идентификацию рабочего механизма уборочного комбайна 102, параметры которого необходимо настроить (в примере Фиг. 10, положение сита 125), направление, в котором должна быть проделана данная настройка (в примере Фиг. 10, увеличение расстояния между соседними планками сита 125), и величину настройки, которая должна быть проделана (в примере Фиг. 10, увеличение промежутка сита 125 на 2 мм).
Регулирующие действия, которые ALU 202 может рекомендовать и проделать, включают число оборотов ротора, просвет между ротором и подбарабаньем, положение лопаток 133 сортировальной машины, положение мякинного решета 126, положение сита 125, скорость вентилятора 128 и скорость движения вперед уборочного комбайна 102, и высоту сельскохозяйственной уборочной насадки 104 над землей.
Для того, чтобы выполнить данные регулирующие действия, ALU 202 соединено и приводит в действие исполнительные механизмы, которые настраивают данные рабочие механизмы (как обсуждалось выше в связи с Фиг. 1).
Экран 1000 также показывает второе наиболее предпочтительное регулирующее действие в области 1004 экрана. Показ дополнительного регулирующего действия на одном и том же экране является полезным вследствие того, что это обеспечивает возможность опытному оператору сравнивать два регулирующих действия одновременно на одном и том же экране с полной детализацией вместо того, чтобы требовать от оператора перелистывания по нескольким экранам регулирующих действий чтобы решить, какое регулирующее действие предпринять. Это может значительно ускорить процесс выбора регулирующего действия.
Оператор может выбрать регулирующее действие, идентифицированное в области 1002 экрана, посредством выбора области 1006 экрана, помеченной «AUTO». В качестве альтернативы, если оператор не желает выбирать регулирующее действие, идентифицированное в области 1002 экрана, а желает выбрать следующее наиболее предпочтительное регулирующее действие (которое показано в области 1004 экрана) или какое-то другое регулирующее действие в приоритизированном списке регулирующих действий, хранящихся в ALU 202, оператор может выбрать область 1008 экрана. В качестве альтернативы, если оператор желает вернуться назад и взглянуть на регулирующее действие, рекомендованное ALU 202, которое оператор видел ранее, оператор может выбрать область 1010 экрана.
В случае, когда оператор выбирает область 1008 экрана, ALU 202 выполнено с возможностью сгенерировать новый экран 1000, на котором второе наиболее предпочтительное регулирующее действие в области 1004 экрана представлено в области 1002 экрана, а следующее регулирующее действие в приоритизированном списке регулирующих действий помещено в области 1004 экрана. Данный процесс может повторяться множество раз до тех пор, пока оператор не увидит все регулирующие действия в приоритизированном списке регулирующих действий, или в качестве альтернативы не выберет конкретное регулирующее действие и не выберет область 1006 экрана.
Когда оператор выбирает область 1006 экрана, ALU 202 в ответ отображает экран 1100 на фиг. 11 на дисплее 208.
На фиг. 11, область 1102 экрана извещает оператора, что регулирующее действие (называемое «настройка» на фиг. 11) выполняется. ALU 202 выполнено с возможностью включения и выключения освещения области 1102 экрана с секундными интервалами в течение четырех секунд для того, чтобы привлечь внимание оператора.
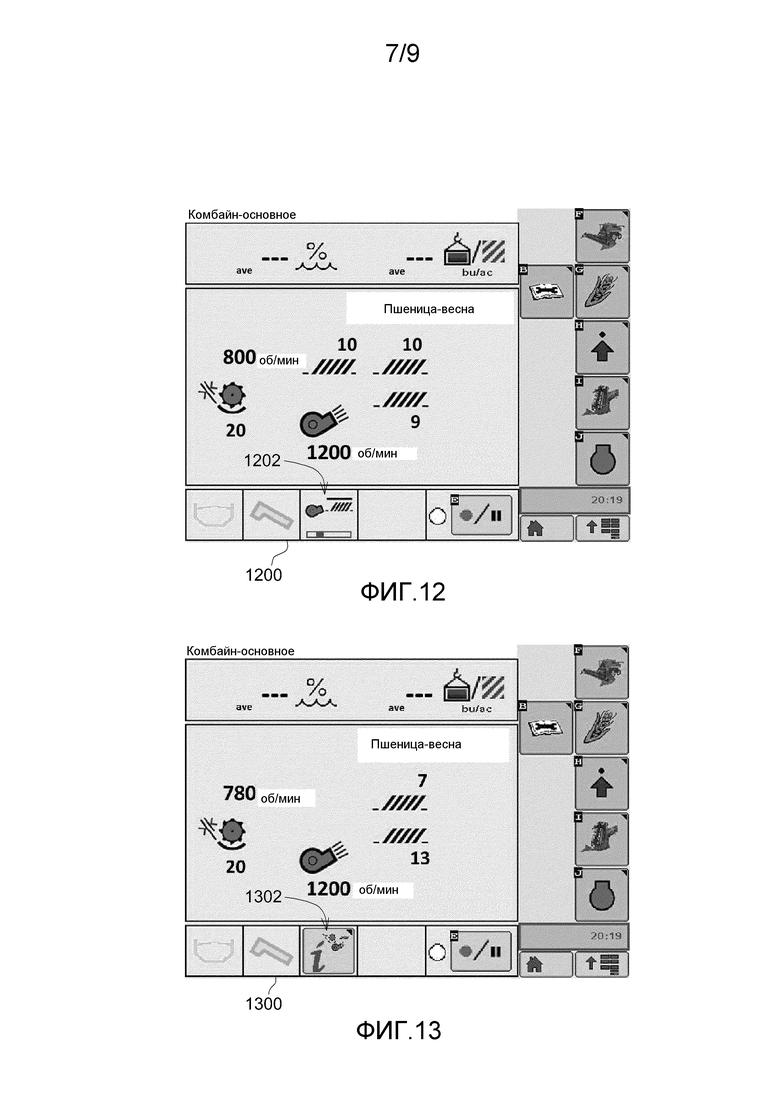
После этого, ALU 202 автоматически отображает экран 1200 на фиг. 12 на дисплее 208.
На фиг. 12, область 1202 экрана показывает, что регулирующее действие все еще выполняется. В частности, цветная полоса, показанная в области 1202 экрана, передвигается назад и вперед, указывая, что регулирующее действие все еще выполняется. После того, как ALU 202 определяет, что настройка завершена, оно тогда в ответ отображает экран 1300 и Фиг. 13.
На фиг. 13, ALU 202 включает и выключает освещение области 1302 экрана до тех пор, пока уборочный комбайн 102 не достигнет устойчивого состояния. Это может быть устойчивое состояние, принимаемое спустя предварительно определенный временной интервал, такой как например, 30 секунд, или устойчивое состояние может определяться ALU 202. В данном случае, ALU 202 будет мониторить датчики (идентифицированные на фиг. 1) и ждать до тех пор, пока один или более из них не прекратит изменяться и не останется постоянным, или в качестве альтернативы, не будет изменяться в пределах узкого диапазона значений. В любом случае, после того, как ALU 202 определяет, что имеется устойчивое состояние, ALU 202 останавливает освещение области 1302 экрана. Визуальный указатель (на экране 1300 это буква «I») будет оставаться в области 1302 экрана, указывая, что оператор еще не показал системе 200 помощи водителю утвердительно, что были сделаны улучшения, которые он требовал. Тем не менее, ALU 202 не будет предпринимать дополнительные регулирующие действия (проделывать больше настроек рабочих механизмов) до тех пор, пока оператор не завершит процесс. Когда устойчивое состояние было достигнуто, область 1302 экрана не освещается, оператор может выбрать область 1302 экрана. Когда оператор выбирает область 1302 экрана, ALU в ответ отображает на дисплее 208 экран 1400 Фиг. 14.
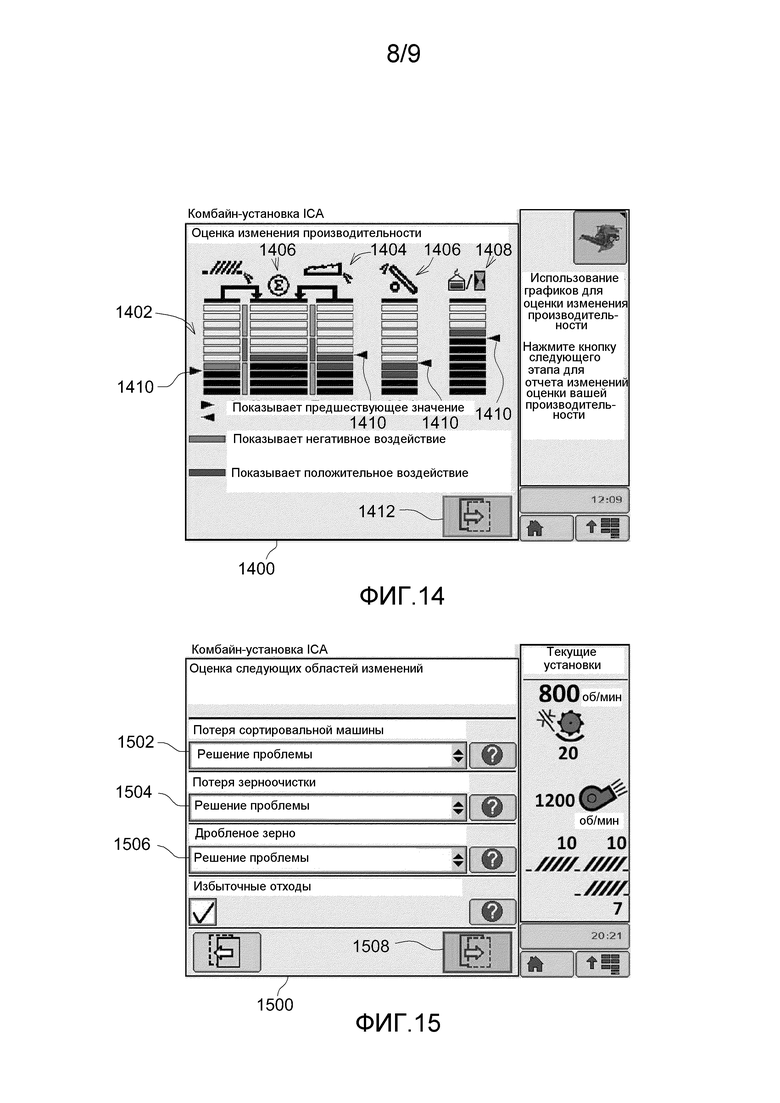
На фиг. 14, ALU отображает несколько областей, указывая изменение производительности уборочного комбайна 102.
В частности, в области 1402 экрана, ALU 202 отображает потерю сортировальной машины в виде вертикальной столбчатой диаграммы. Чем выше освещенные полосы продолжаются в области 1402 экрана, тем больше потери сортировальной машины. В области 1404 экрана ALU 202 отображает потерю зерноочистки в виде вертикальной столбчатой диаграммы. Чем выше освещенные полосы продолжаются в области 1404 экрана, тем больше потери зерноочистки. В области 1406 экрана, ALU 202 отображает сумму потерь зерноочистки и потерь сортировальной машины. В области 1406 экрана ALU 202 отображает объем отходов. В области 1408 экрана, ALU 202 отображает выход машины (напр., объем зерна на единицу площади поля, например, бушелей на акр).
Производительность перед настройкой указана маленьким визуальным указателем 1410, который указывает оператору производительность уборочного комбайна 102 непосредственно перед предыдущим регулирующим действием, которое ALU 202 предложило и которое оператор выбрал. Является ли изменение производительности положительным или отрицательным показано цветом полос на столбчатых диаграммах.
Экран, показанный на фиг. 14, позволяет оператору немедленно определить, какие улучшения были сделаны в работе машин при последнем регулирующем действии.
Увидев экран 1400, оператор может в любое время выбрать область 1412 экрана. Когда оператор выбирает область 1412 экрана, ALU 202 в ответ отображает экран 1500 на фиг. 15.
На фиг. 15, ALU отображает все области улучшений, которые оператор выбрал на экране 800 Фиг. 8 и экране 900 Фиг. 9. Каждая из областей улучшений, которую оператор выбрал, показана в виде списка на экране 1500. Области улучшений идентифицируют терминами, которые оператор выбрал на экране 800 и экране 900. Пример Фиг. 15 показывает, что бы отображалось, если бы оператор выбрал «потеря сортировальной машины», «потери на решетном стане», «разбитое зерно» и «избыточные отходы». Каждая из областей улучшений на экране 1500 связана с соответствующим раскрывающимся блоком списка, расположенным непосредственно под названием области улучшений. Соответственно, область улучшений «потеря сортировальной машины» имеет раскрывающийся блок списка, показанный в области 1502 экрана, область улучшений «потери на решетном стане» имеет раскрывающийся блок списка, показанный в области 1504 экрана, а область улучшений «разбитое зерно» имеет блок списка, показанный в области 1506 экрана.
При выборе какой-либо из данных областей экрана, ALU 202 генерирует на экране 1500 раскрывающийся блок списка. Раскрывающийся блок списка предлагает оператору несколько вариантов выбора, с помощью которых он характеризует изменения в области улучшений, а также показывает, не требуется ли дополнительное улучшение.
Данные варианты выбора из блока списка включают «проблема разрешена» (что является первоначальным значением по умолчанию, автоматически генерируемым ALU 202), «лучше», «хуже», и «одинаково».
Если оператор выбирает «проблема разрешена», оператор подает ALU 202 сигнал, что теперь больше нет необходимости в улучшении связанной области улучшений, и оператор удовлетворен результатами, полученными с помощью последнего регулирующего действия. Если оператор выбирает «лучше», оператор подает ALU 202 сигнал 202, что с помощью последнего регулирующего действия произошло некоторое улучшение в области улучшений, но что оператор хотел бы большее улучшение. Если оператор выбирает «одинаково» оператор подает ALU 202 сигнал, что с помощью последнего регулирующего действия не произошло существенного изменения, сделанного в данной области улучшений, и что оператор хотел бы большего улучшения. Если оператор выбирает «хуже» оператор подает ALU 202 сигнал, что улучшение не произошло, но что область улучшений стала хуже.
После того, как оператор охарактеризовал все области улучшений либо посредством выбора раскрывающегося блока, либо посредством приема обозначения по умолчанию «проблема разрешена», тогда оператор может выбрать область 1508 экрана. В этот момент, ALU 202 в ответ сравнивает все выборы оператора на экране 1500 (включая выбор по умолчанию «проблема разрешена», если оператор ничего не изменил) для определения, не является ли нерешенной какая-либо область улучшений. Если по меньшей мере одна область улучшений не разрешена, ALU 202 в ответ снова отображает экран 1000 на фиг. 10. В данном случае, однако, поскольку оператор ранее выбрал по меньшей мере одно регулирующее действие, ALU 202 отображает следующее регулирующее действие, которое оно извлекает из своего приоритизированного списка регулирующих действий. Таким образом, оператор может повторить процесс выбора регулирующих действий, рекомендованных ALU 202 точно так, как описано выше в связи с Фиг. 10, без необходимости возврата к экрану 600 на фиг. 6 и нового выбора сначала каждой области улучшений.
Данный процесс последовательного разрешения множества областей улучшений с использованием приоритизированного списка регулирующих действий (т.е. процессов ALU 202, связанных с Фиг. 10-15) повторяется до тех пор, пока оператор не показывает, что все области улучшений были разрешены. В этот момент, ALU 202 показывает, что процесс оптимизации завершен посредством отображения экрана 1600 на фиг. 16.
Выше было описано единственное ALU 202. ALU 202 может включать два или более ALU, которые соединены вместе в компьютерную сеть. Каждое из ALU в компьютерной сети может выполнять одну или более функций, названных выше для ALU 202.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2013 |
|
RU2612444C2 |
| УБОРОЧНАЯ МАШИНА С СИСТЕМОЙ ОЧИСТКИ, ИМЕЮЩЕЙ РАННИЙ ВЫПУСК ЧИСТОГО ЗЕРНА | 2012 |
|
RU2589225C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА С ДВИЖУЩЕЙСЯ В БОКОВОМ НАПРАВЛЕНИИ СКАТНОЙ ЗЕРНОВОЙ ДОСКОЙ | 2016 |
|
RU2729159C2 |
| АДАПТИВНЫЕ ЦЕЛЕВЫЕ ПОКАЗАТЕЛИ ДЛЯ УПРАВЛЕНИЯ ПЕРЕДВИЖНОЙ МАШИНОЙ | 2016 |
|
RU2725806C2 |
| УБОРОЧНАЯ МАШИНА С ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ ДЛЯ ВЫЯВЛЕНИЯ УСТОЙЧИВОГО СОСТОЯНИЯ ПЕРЕРАБОТКИ УРОЖАЯ | 2014 |
|
RU2649016C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА С ВРАЩАЮЩИМСЯ ЭЛЕВАТОРОМ | 2015 |
|
RU2709763C2 |
| КОНТУР УПРАВЛЕНИЯ УСИЛИЕМ НА ГРУНТ ШАРНИРНО-СОЧЛЕНЕННОЙ УБОРОЧНОЙ ЖАТКИ | 2014 |
|
RU2672373C2 |
| Сельскохозяйственный элеватор, снабженный множеством поперечных шнеков | 2015 |
|
RU2692639C2 |
| УБОРОЧНЫЙ КОМБАЙН С БОКОВЫМ ДВИЖЕНИЕМ СКАТНОЙ ЗЕРНОВОЙ ДОСКИ | 2016 |
|
RU2725817C2 |
| СИСТЕМА ПРИВОДА СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2016 |
|
RU2730031C2 |
Группа изобретений относится к сельскому хозяйству. Система помощи водителю для уборочного комбайна содержит арифметическое логическое устройство, дисплей, множество настраиваемых рабочих механизмов уборочного комбайна, множество датчиков и множество исполнительных механизмов для выборочной настройки рабочих механизмов. Арифметическое логическое устройство включает электронную запоминающую схему, хранящую определенные рабочие параметры и цифровые данные, используемые арифметическим логическим устройством для выполнения команд. Арифметическое логическое устройство выполнено с возможностью получения от оператора необходимых областей улучшений и с возможностью расчета регулирующего действия для улучшения отдельных пунктов, выбранных оператором для улучшения. Группа изобретений обеспечивает достижение оптимизированного рабочего состояния комбайна в кратчайшее время. 2 н. и 9 з.п. ф-лы, 16 ил.
1. Система помощи водителю для уборочного комбайна, которая содержит:
дисплей;
множество настраиваемых рабочих механизмов уборочного комбайна, который обрабатывает убираемый материал, проходящий через уборочный комбайн, при этом каждый рабочий механизм имеет связанный с ним рабочий параметр, изменяемый путем настройки рабочего механизма;
множество исполнительных механизмов, соответственно соединенных с множеством рабочих механизмов для выборочной настройки рабочих механизмов для изменения связанного с ними рабочего параметра;
множество датчиков, соответственно связанных с рабочими механизмами для определения связанного с ними рабочего параметра;
арифметическое логическое устройство, соединенное для выборочного регулирования множества исполнительных механизмов множества рабочих механизмов для того, чтобы выборочно регулировать связанные с ними рабочие параметры, с множеством датчиков для получения определенных рабочих параметров и с дисплеем для предоставления информации оператору;
при этом арифметическое логическое устройство включает в себя электронную запоминающую схему, хранящую определенные рабочие параметры и обновляющую указанные рабочие параметры во время работы уборочного комбайна, которая хранит команды, выполняемые арифметическом логическим устройством и хранит цифровые данные, используемые арифметическим логическим устройством при выполнении команд;
при этом дисплей содержит устройство ввода-вывода, посредством которого оператор может взаимодействовать для передачи команд арифметическому логическому устройству, и предоставляет список множества общих пунктов, относящихся к обработке убираемого материала, вместе со списком множества отдельных пунктов, соответственно относящихся к множеству общих пунктов, при этом оператор может выбирать множество пунктов из множества общих и отдельных пунктов для улучшения;
причем каждый из множества общих и отдельных пунктов для улучшения можно улучшить путем настройки по меньшей мере одного из рабочих механизмов для изменения связанного с ними рабочего параметра по меньшей мере одного рабочего механизма;
при этом арифметическое логическое устройство выполнено с возможностью электронного приема от оператора по меньшей мере двух пунктов для улучшения, выбранных оператором из списка общих и отдельных пунктов для улучшения;
причем электронная запоминающая схема содержит внутреннюю базу данных, к которой может обращается арифметическое логическое устройство для определения регулирующих действий, которые могут быть предприняты для улучшения пунктов, выбранных для улучшения;
при этом арифметическое логическое устройство выполнено с возможностью действовать в ответ на получение от оператора по меньшей мере двух пунктов для улучшения, для определения по меньшей мере одного регулирующего действия для регулирования по меньшей мере одного исполнительного механизма для изменения рабочего параметра по меньшей мере одного рабочего механизма до предварительно выбранного настроенного рабочего параметра, который по расчетам арифметического логического устройства должен улучшить по меньшей мере два пункта, выбранных оператором для улучшения.
2. Система помощи водителю по п. 1, в которой по меньшей мере одно регулирующее действие включает множество регулирующих действий для соответствующего изменения множества рабочих параметров множества рабочих механизмов путем соответствующей регулировки множества исполнительных механизмов, соответственно соединенных для регулировки множества рабочих механизмов для соответствующего изменения рабочих параметров множества рабочих механизмов до предварительно выбранного множества настроенных рабочих параметров, которые по расчетам арифметического логического устройства должны улучшить по меньшей мере два пункта, выбранных оператором для улучшения, и в которой арифметическое логическое устройство выполнено с возможностью установки приоритета отдельных регулирующих действий из множества регулирующих действий на основании степени, в которой отдельные регулирующие действия будут наиболее улучшать по меньшей мере два пункта для улучшения, выбранных оператором.
3. Система помощи водителю по п. 1, в которой арифметическое логическое устройство выполнено с возможностью одновременного представления на дисплее каждого из по меньшей мере двух пунктов, ранее выбранных оператором для улучшения.
4. Система помощи водителю по п. 1, в которой арифметическое логическое устройство выполнено с возможностью представления на дисплее критериев разрешения для каждого из пунктов для улучшения.
5. Система помощи водителю по п. 4, в которой критерии разрешения содержат визуальные указатели, указывающие улучшение для каждого из пунктов для улучшения на дисплее, и визуальные критерии, указывающие ухудшение для каждого из пунктов для улучшения на дисплее.
6. Система помощи водителю по п. 4, в которой критерии разрешения содержат визуальные указатели, указывающие, что пункты для улучшения были улучшены и, следовательно, были разрешены.
7. Система помощи водителю по п. 1, в которой арифметическое логическое устройство выполнено с возможностью определения по меньшей мере одного дополнительного регулирующего действия, которое, как рассчитывает арифметическое логическое устройство, будет улучшать по меньшей мере два пункта, выбранных оператором для улучшения, и кроме этого в которой арифметическое логическое устройство выполнено с возможностью представления одновременно на дисплее по меньшей мере одного регулирующего действия и по меньшей мере одного дополнительного регулирующего действия.
8. Способ эксплуатации системы помощи водителю для уборочного комбайна по любому из пп. 1-7, содержащего множество рабочих механизмов, которые обрабатывают убираемый материал, проходящий через уборочный комбайн, и который содержит множество исполнительных механизмов, соответственно соединенных с множеством рабочих механизмов для настройки рабочих параметров рабочих механизмов,
включающий в себя этапы:
предоставления оператору списка пунктов, содержащего множество общих пунктов, относящихся к обработке убираемого материала, вместе со списком множества отдельных пунктов, соответственно относящихся к множеству общих пунктов, при этом оператор может выбирать множество пунктов из множества общих и отдельных пунктов для улучшения;
электронного получения от оператора по меньшей мере двух пунктов для улучшения, выбранных оператором из списка пунктов, содержащего общие и отдельные пункты, относящиеся к обрабатываемому материалу;
электронного получения информации, относящейся к параметрам рабочих механизмов уборочного комбайна, которые обрабатывают убираемый материал, проходящий через уборочный комбайн, и которые связаны с генерированием множества пунктов для улучшения, относящихся к обрабатываемому материалу, из списка пунктов;
электронного расчета по меньшей мере одного регулирующего действия на основе электронно полученной информации, относящейся к рабочим механизмам, которые связаны с генерированием множества пунктов для улучшения, которое будет улучшать по меньшей мере два выбранных пункта для улучшения путем настройки по меньшей мере одного рабочего механизма для изменения рабочего параметра по меньшей мере одного рабочего механизма до предварительно выбранного настроенного рабочего параметра; и
электронного представления по меньшей мере одного регулирующего действия на электронном дисплее.
9. Способ эксплуатации системы помощи водителю по п. 8, дополнительно включающий этап электронного расчета по меньшей мере одного дополнительного регулирующего действия, которое будет улучшать по меньшей мере два пункта для улучшения, выбранные оператором, путем настройки по меньшей мере одного дополнительного рабочего механизма для изменения рабочего параметра по меньшей мере одного дополнительного рабочего механизма до предварительно выбранного настроенного рабочего параметра.
10. Способ эксплуатации системы помощи водителю по п. 9, дополнительно включающий этап электронного и одновременного представления по меньшей мере одного регулирующего действия, включающего в себя предварительно выбранный настроенный рабочий параметр по меньшей мере одного рабочего механизма, и по меньшей мере одного дополнительного регулирующего действия, включающего в себя предварительно выбранный настроенный рабочий параметр по меньшей мере одного рабочего механизма, на электронном дисплее.
11. Способ эксплуатации системы помощи водителю по п. 9, дополнительно включающий этап электронного определения, какое из по меньшей мере одного регулирующего действия и по меньшей мере одного дополнительного регулирующего действия будет более хорошо улучшать по меньшей мере два выбранных пункта для улучшения, полученные от оператора.
| US 8406964 B2, 26.03.2013 | |||
| DE 10147733 A1, 10.04.2003 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕЛЕВОГО ЗНАЧЕНИЯ ПАРАМЕТРА УПРАВЛЕНИЯ РАБОЧЕГО АГРЕГАТА УБОРОЧНОЙ СЕЛЬХОЗМАШИНЫ, УСТРОЙСТВО УПРАВЛЕНИЯ РАБОЧИМ АГРЕГАТОМ И УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2006 |
|
RU2403698C2 |
| ЗЕРНОУБОРОЧНАЯ МАШИНА, ПРЕИМУЩЕСТВЕННО ЗЕРНОУБОРОЧНЫЙ КОМБАЙН, С МУЛЬТИПРОЦЕССОРНЫМ УПРАВЛЯЮЩИМ УСТРОЙСТВОМ | 1994 |
|
RU2154296C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ УБОРОЧНОЙ СЕЛЬХОЗМАШИНОЙ | 2006 |
|
RU2402191C2 |

