Область техники, к которой относится изобретение
Настоящее изобретение относится к системам регулирования движения дорожного транспорта, и, более конкретно, к системе помощи водителю для предотвращения съезда с полосы движения.
Уровень техники
Автомобильная индустрия всего мира развивается очень активно. Повсеместное развитие и внедрение новых технологий привело к активному развитию автоматизированных решений для транспортных средств - создание передовых систем содействия водителю и полностью автономных транспортных средств (беспилотных автомобилей).
Прогнозируется, что к 2035 году беспилотные автомобили могут составить до 25% от всех продаваемых в мире автомобилей. Их активное использование приведет к тому, что в городах парк автомобилей сократится на 60%, выхлопные газы - на 80%, аварии на дорогах - на 90%.
Процесс перемещения беспилотных или оснащенных системами содействия водителю транспортных средств схож и его можно представить в виде следующих шагов, которые выполняются непрерывно в режиме реального времени с разной степенью детализации (в зависимости от уровня автоматизации автомобиля):
1. Локализация. Транспортное средство определяет расположение различных объектов: светофора, дорожной разметки, дорожных знаков, препятствий и т.д.
2. Восприятие. Транспортное средство выполняет идентификацию окружающих объектов и определяет их скорость, направление движения.
3. Предсказание. Транспортное средство прогнозирует процессы и события - например, движение других автомобилей.
4. Планирование. Исходя из предыдущих задач, алгоритмы транспортного средства определяют дальнейшие действия и отдают команды системам управления или рекомендации водителю.
Система продвинутой помощи водителю (Advanced Driver Assistance System или сокращенно ADAS) включает в себя различные алгоритмы взаимодействия и оповещения. В большинстве производимых автомобилей сейчас устанавливаются системы ADAS разного уровня в зависимости от класса транспортного средства. Ключевым фактором, способствующим росту мирового рынка ADAS систем, стали правительственные нормативные акты в некоторых странах. Интерес автопарков к ADAS обусловлен желанием сократить эксплуатационные расходы и вероятность возможных инцидентов.
ADAS включает в себя различные алгоритмы, задача которых - анализировать ситуацию на дороге и предупредить водителя о возникновении опасного инцидента во время движения.
Сущность изобретения
Настоящее изобретение направлено на создание системы помощи водителю, способной выполнять отслеживание полосы движения и предупреждать водителя о возможном съезде с нее.
В частности, предложена система помощи водителю, содержащая расположенный в транспортном средстве (ТС) обработчик, соединенный с шиной CAN ТС с возможностью обмена сигналами с шиной CAN и приема сигналов от датчиков ТС через шину CAN, соединенный с камерой ТС с возможностью приема сигналов от нее и соединенный с приемником глобальной навигационной спутниковой системы (GNSS) ТС с возможностью приема сигналов от него, при этом обработчик выполнен с возможностью:
получать значение текущей скорости ТС и значение указателей поворота от соответствующих датчиков ТС;
выполнять поиск разметки и полосы движения на основе изображений, полученных с камеры ТС, с помощью одного или более методов компьютерного зрения;
если скорость ТС находится в предварительно заданных пределах и если обнаружена полоса движения: вычислять положение ТС в полосе в виде сдвига ТС относительно полосы движения на основе местоположения и ориентации приемника GNSS на дороге, известных параметров ТС, а также места и ориентации установки приемника GNSS на ТС, и вычислять скорость выхода ТС с полосы на основе положения ТС в полосе и направления движения ТС относительно полосы;
если значение сдвига ТС относительно полосы движения превышает предварительно заданный предел и модуль скорости выхода ТС с полосы превышает предварительно заданный предел, проверять значение указателей поворота; и
если направление указателя поворота не совпадает с направлением выхода ТС из полосы или указатель поворота не включен, выдавать предупреждающий сигнал о возможном съезде ТС с полосы движения.
В одном из вариантов осуществления, если скорость ТС находится в предварительно заданных пределах и если обнаружена полоса движения, обработчик дополнительно выполнен с возможностью повторно выполнять поиск разметки и полосы движения.
В одном из вариантов осуществления обработчик дополнительно выполнен с возможностью, после получения значения текущей скорости ТС выполнять предсказание скорости движения, с которой будет двигаться ТС через предварительно заданный промежуток времени, соответствующий времени обработки на этапе поиска разметки и полосы движения, причем при проверке того, находится ли скорость ТС в предварительно заданных пределах, обработчик выполнен с возможностью использовать упомянутое предсказание скорости движения ТС через предварительно заданный промежуток времени.
В одном из вариантов осуществления обработчик дополнительно выполнен с возможностью использовать упомянутое предсказание скорости движения ТС через предварительно заданный промежуток времени, чтобы корректировать значение скорости выхода ТС с полосы.
В одном из вариантов осуществления, если на этапе поиска разметки и полосы движения не удалось найти полосу, обработчик дополнительно выполнен с возможностью выполнять предсказание полосы движения на данный момент на основе истории данных.
Технический результат
Благодаря вышеизложенным признакам настоящее изобретение позволяет:
- повысить точность и эффективность работы системы помощи водителю;
- повысить безопасность дорожного движения.
Краткое описание чертежей
На Фиг. 1 представлена блок-схема способа, выполняемого предложенной системой.
На Фиг. 2 представлена блок-схема системы помощи водителю.
Подробное описание
ADAS для получения информации об окружающем мире использует различные датчики: камеры, радары и лидары.
Общие принципы работы всех автоматизированных транспортных средств схожи и для них используются множество технологий:
1. Камеры фото и видеофиксации для детекции различных объектов.
2. Радары для обнаружения воздушных, морских и наземных объектов, а также для определения их дальности, скорости и геометрических параметров путем излучения радиоволн.
3. Лидары для создания облака точек, измерения расстояний и определения других параметров путем излучения света.
4. Другие датчики для контроля состояния внутренних систем транспортного средства и окружающего пространства.
5. Искусственный интеллект для обработки информации, поступившей с датчиков и камер, для управления транспортным средством или для поддержки принятия решений.
Среди существующих систем ADAS можно выделить следующие:
- Антиблокировочные тормозные системы (ABS): Ставшая стандартной для многих современных автомобилей система ABS предотвращает блокировку колес во время аварийного торможения, обнаруживая различия в скорости вращения колес, и затем быстрыми импульсами затормаживая соответствующие колеса до тех пор, пока они не станут вращаться с той же скоростью, что и другие.
- Система экстренного торможения (BA): Система экстренного торможения или система помощи при аварийном торможении (EBA), предназначена для распознавания экстренного торможения с использованием данных от датчика торможения и переднего радара или ультразвуковых датчиков. Если водитель недостаточно сильно нажал на педаль тормоза, то для обеспечения дополнительного тормозного усилия включается система экстренного торможения, работающая совместно с системой ABS.
- Система курсовой устойчивости (ESP): Система ESP, также известная как электронный контроль устойчивости (ESC), предназначена для снижения риска заноса путем притормаживания соответствующих колес и уменьшения мощности двигателя в случае обнаружения избыточной или недостаточной реакции автомобиля на поворот руля при осуществлении поворотов, при маневрах уклонения от столкновения или при внезапном изменении дорожных условий и сцепления с дорожным полотном. При этом важно, чтобы любое дополнительное оборудование на автомобиле, например, тягово-сцепное устройство, было правильно установлено и запрограммировано. Когда к автомобилю прицепляется прицеп или фургон, ESP автоматически настраивается для учета дополнительной нагрузки и распределения веса.
- Адаптивный круиз-контроль (ACC): Активный круиз-контроль (ACC), также известный как автономный круиз-контроль, интеллектуальный круиз-контроль или радиолокационный круиз-контроль, автоматически регулирует скорость автомобиля, поддерживая безопасное расстояние до автомобиля, движущегося впереди. Большинство систем автоматически отключаются при определенной скорости, однако некоторые производители предлагают функцию Stop & Go или Queue Assist, которые можно использовать в медленно движущемся потоке.
- Система предупреждения фронтального столкновения (FCW): Система FCW, также известная как система предотвращения столкновений или система раннего предупреждения о лобовом столкновении, постоянно контролирует дорогу впереди с целью обнаружения объектов на пути транспортного средства, таких как пешеходы, животные или другие транспортные средства. В случае неизбежного столкновения система подает водителю аудио- или визуальные сигналы, чтобы он мог предпринять маневр уклонения, то есть, затормозить или объехать препятствие.
- Система автономного экстренного торможения (AEB): Система AEB - это дальнейшее усовершенствование системы предупреждения столкновения. Вместо того, чтобы просто предупреждать водителя, она задействует тормоз и/или рулевое управление без его участия, чтобы смягчить последствия аварии или даже полностью предотвратить ее.
- Система предупреждения о выезде с полосы (LDW): Системы LDW предназначены для предотвращения непреднамеренного съезда автомобиля с полосы движения. Если система обнаруживает, что автомобиль отклоняется от курса без каких-либо соответствующих сигналов, она подает аудиовизуальные сигналы, чтобы водитель мог скорректировать траекторию движения.
- Система контроля положения автомобиля относительно дорожной разметки (LKA): Системы LKA или системы контроля положения автомобиля относительно дорожной разметки представляют собой следующий этап развития систем слежения за дорожной разметкой. Вместо того, чтобы просто предупредить водителя о выезде с полосы движения, система LKA автоматически корректирует траекторию движения, возвращая автомобиль в исходное положение без какого-либо участия водителя. На некоторые автомобили также устанавливается усовершенствованная версия этой системы, которая называется системой адаптивного управления движением по полосе. Она постоянно корректирует курс, чтобы автомобиль всегда находился в центре своей полосы движения.
- Система помощи при перестроении: Эта система, которую обычно называют системой обнаружения объектов в слепой зоне или системой информирования об объектах в слепой зоне, контролирует область вокруг автомобиля на предмет движения по каким-либо полосам. Если система определяет, что менять полосу движения небезопасно из-за другого автомобиля, движущегося по полосе, на которую нужно перестроиться, особенно в слепой зоне водителя, она подает сигнал тревоги.
- Система интеллектуального регулирования/адаптации скорости (ISA): Система ISA помогает водителю поддерживать безопасную и/или разрешенную скорость. Если автомобиль превышает это ограничение, система либо предупредит водителя, либо примет меры по снижению скорости путем снижения мощности двигателя.
- Система распознавания дорожных знаков (TSR): Сканируя дорогу впереди, система TSR помогает водителям идентифицировать находящиеся впереди дорожные знаки, такие как знаки ограничения скорости или знаки, информирующие о потенциальных опасностях. Система определяет знак и передает его изображение на приборную панель и/или дисплей информационно-развлекательной системы, чтобы предупредить водителя.
- Адаптивные фары: Адаптивные фары всегда направляют свет на дорогу благодаря информации, получаемой от системы рулевого управления, а также информации о скорости и угле наклона автомобиля. Наряду с улучшением видимости в условиях низкой освещенности она также уменьшает вероятность ослепления встречных водителей.
- Системы контроля давления в шинах (TPMS): Система TMPS предупреждает водителя о недостаточном давлении в одной или нескольких шинах, измеряя либо скорость вращения колес, либо давление внутри каждой шины. Помимо повышения безопасности система помогает снизить количество выхлопных газов и расход топлива.
- Системы ночного видения: Системы ночного видения с помощью тепловизионных камер могут регистрировать объекты за пределами зоны, освещаемой фарами автомобиля, предупреждая водителя о возможных столкновениях в условиях низкой освещенности или в плохих погодных условиях.
- Система помощи при парковке: Одна из наиболее распространенных технологий ADAS, система помощи при парковке, может представлять собой как камеры заднего вида, которые просто передают аудио- или визуальные сигналы водителю о близости любых препятствий, так и полностью автономные системы, которые самостоятельно осуществляют управление автомобилем при въезде на парковочное место и/или при выезде с него.
- Система контроля усталости водителя: Эти системы, также известные как системы распознавания сонливости водителя, могут обнаруживать усталость, наблюдая за поведением водителя в начале и во время каждой поездки. При обнаружении каких-либо признаков усталости система посылает водителю предупреждающий сигнал.
Система ADAS может предупреждать водителя о следующих опасных ситуациях:
- Предупреждение о критическом сближении с пешеходом. Предотвращает столкновение, подавая предупреждающие сигналы, в случаях, когда впереди находится пешеход, велосипед или мотоцикл (который двигается, например, со скоростью от 0 до 40 км/час).
- Система контроля опасного сближения. Предупреждает водителя сигналами и изображением на экране о слишком быстром сближении.
- Предупреждает о съезде с полосы движения. Система подает звуковые и визуальные предупреждения и помогает восстановить направление, если автомобиль неожиданно съехал с полосы.
- Уведомляет водителя, если впереди стоящий автомобиль начинает двигаться вперед даже с нулевой скоростью (при полном состоянии остановки), а сзади стоящий автомобиль не двигается в течение заданного времени - например, 2 секунд.
- Уведомляет водителя, когда в зоне обнаружения находится транспортное средство. Диапазон обнаружения может быть установлен, например, на диапазон 1,2 м /2,0 м /3,0 м (активный от 0 до 30 км/ч).
- Записывает кадры до и после аварии. Видеорегистратор записывает данные в память - например, на микро-SD-карту каждую минуту в цикле.
- Распознавание знаков ограничения скорости. Система издает предупредительный сигнал, если водитель движется со скоростью выше разрешенной.
Ассоциация инженеров автомобильной промышленности классифицирует системы ADAS на уровни от 0 до 5. Ниже в таблице 1 приведено краткое описание этих уровней.
Система предупреждения о выезде с полосы (СПВП)
Настоящее изобретение направлено на создание системы помощи водителю, способной выполнять отслеживание полосы движения и предупреждать водителя о возможном выезде с нее.
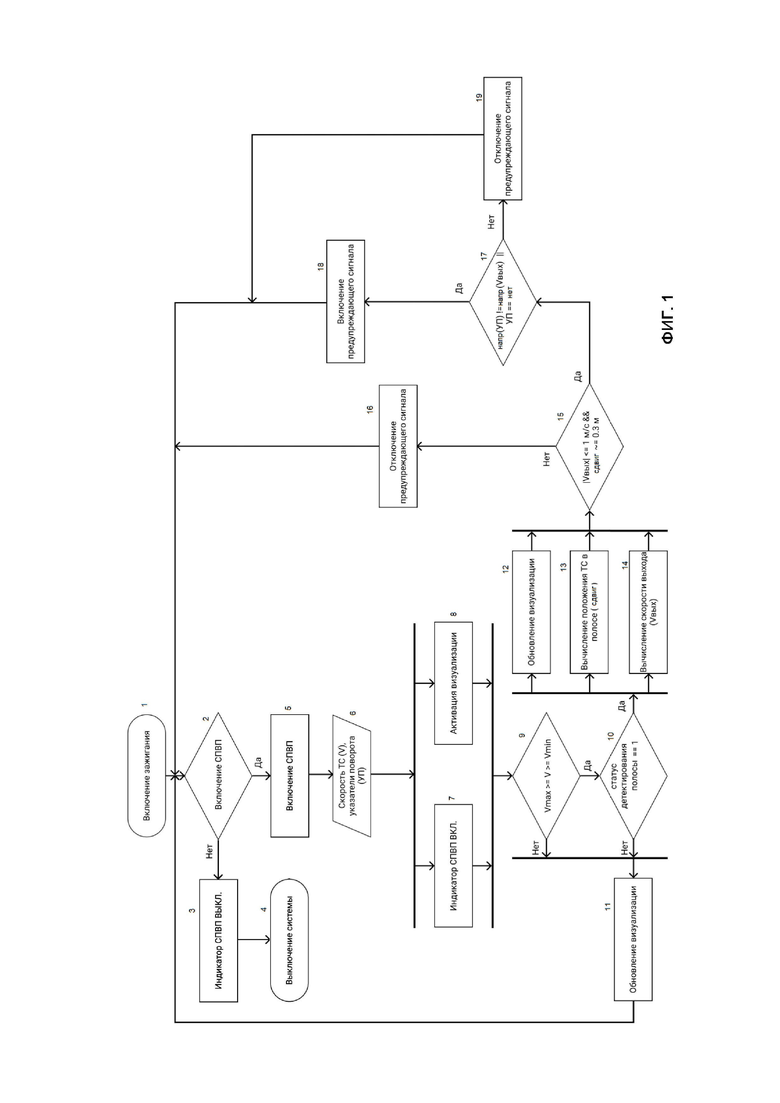
Способ, реализуемый предложенной системой, показан на Фиг. 1.
На этапе 1 происходит включение зажигания.
На этапе 2 система спрашивает водителя, следует ли включить (или наоборот, не включать) СПВП. В другом варианте система может не взаимодействовать напрямую с водителем, а ожидать ввод от водителя. Также, если по умолчанию система должна быть включена, то она может ожидать ввод от водителя в течение предварительно заданного времени перед включением.
Если получен отказ, на этапе 3 система выдает сигнал в шину CAN о том, что СПВП выключена, чтобы на приборной панели или в другом подходящем положении был активирован соответствующий индикатор и чтобы водитель учитывал этот факт при дальнейшем использовании транспортного средства (ТС).
После этого на этапе 4 система может быть выключена или может перейти в режим ожидания, в котором она не работает и лишь ожидает сигнала включения от водителя.
Если на этапе 2 не получен отказ, на этапе 5 система СПВП включается, то есть запускается обработка сигналов датчиков и камеры и другие функции системы.
На этапе 6 содержащийся в системе обработчик получает через шину CAN значение скорости ТС и значение указателей поворота (УП) от соответствующих датчиков. Например, если ни один указатель поворота не включен, то значение УП может быть равно «нет» или «0», если включен левый УП, то значение УП может быть равно «левый» или «-1», и т.д. Возможны и другие варианты в зависимости от конкретной реализации датчиков, шин и других компонентов системы.
Вместе с включением системы на этапе 7 выдается сигнал в шину CAN о том, что СПВП включена, чтобы на приборной панели или в другом подходящем положении был активирован соответствующий индикатор и чтобы водитель учитывал этот факт при дальнейшем использовании ТС.
Также на этапе 8 выполняется активация визуализации, то есть поиск разметки и полосы движения. Поиск разметки и полосы движения выполняется на основе изображений, полученных с камеры ТС, с помощью нейронной сети или с помощью других методов компьютерного зрения, таких как пороговая обработка на основе гистограмм, метод минимального покрывающего дерева, метод DBSCAN и т.д. Кроме того, возможно использование параллельной и/или последовательной комбинации различных методов, каждый из которых направлен на определение отдельных параметров дороги или разметки или на обработку данных - например, поиск границ дороги, определение цвета, формы, кластеризация, фильтрация, сравнение с предыдущими кадрами, сравнение с предсказанными кадрами и т.д.
На этапе 9 выполняется проверка, находится ли текущая скорость ТС в предварительно заданных пределах, в которых целесообразно использование СПВП. Например, может быть задан нижний порог скорости в 50 км/ч, что подразумевает, что на скоростях ниже 50 км/ч водитель самостоятельно способен контролировать разметку и не нуждается в дополнительной индикации. Например, может быть задан верхний порог скорости в 125 км/ч, что подразумевает, что водитель достигает скорости выше 125 км/ч осознанно и сигналы СПВП при этом могут привести к снижению концентрации внимания водителя на дорожной обстановке, что критично на такой скорости. Таким образом, обеспечивается достаточная степень безопасности дорожного движения, при этом снижается психологическая нагрузка на водителя и скорость его утомления. Возможны также варианты, при которых верхний, нижний или оба порога не устанавливаются в зависимости от требований конкретного применения (например, в зависимости от стажа водителя, от максимально достижимой скорости ТС, от набора условий и предписаний ПДД на том участке, где должно использоваться ТС, и т.д.).
Если проверка на этапе 9 показала, что текущая скорость ТС находится в предварительно заданных пределах, то система переходит к этапу 10, на котором определяется, обнаружена ли полоса движения.
Если проверка на этапе 9 показала, что текущая скорость ТС не подразумевает использование СПВП, или если проверка на этапе 10 показала, что полоса движения не обнаружена, то система переходит к этапу 11, на котором принимается решение о необходимости обновления визуализации, вследствие чего система возвращается к этапу 2 или сразу к этапу 6.
Возможен вариант осуществления, в котором этап 9 выполняется перед этапом 8, что может предотвратить ненужную обработку, связанную с поиском полосы и тем самым сэкономить вычислительные ресурсы и ресурсы питания. Кроме того, в другом варианте осуществления между этапами 6 и 8 может выполняться дополнительный этап (не показан), на котором выполняется предсказание скорости движения, с которой будет двигаться ТС через предварительно заданный промежуток времени. Это связано с тем, что обработка на этапе 8 визуализации занимает некоторое время, и результат обработки на момент окончания обработки может оказаться неактуальным. Предсказание может выполняться методами аппроксимации, такими как регрессия, экстраполяция и т.д., и учитывать предыдущие показания скорости, технические характеристики ТС (касающиеся ускорения, торможения), данные о дорожном покрытии, данные о стиле вождения водителя и т.д. Таким образом, обеспечивается повышение точности системы.
Если проверка на этапе 9 показала, что текущая скорость ТС находится в предварительно заданных пределах, и проверка на этапе 9 показала, что полоса движения обнаружена, система переходит к этапу 12, на котором принимается решение о необходимости обновления визуализации, вследствие чего система возвращается к этапу 2 или сразу к этапу 6.
Вместе с тем, система также переходит к этапу 13, на котором выполняется вычисление положения ТС в полосе. В частности, с учетом данных глобальной навигационной спутниковой системы (GNSS) определяется местоположение и ориентация приемника GNSS на дороге. Затем с учетом известных параметров ТС (размер и положение колес), а также места и ориентации установки приемника GNSS на ТС определяется положение ТС в полосе. Значение положения ТС в полосе может выражаться в виде сдвига (смещения) ТС относительно полосы движения - например, 0 м, 0,3 м, -0,2 м и т.д.
Кроме того, система выполняет этап 14, на котором вычисляется скорость выхода ТС с полосы. Для этого учитывается положение ТС в полосе и направление движения ТС относительно полосы. При этом система может учитывать вышеуказанное предсказание скорости движения ТС через предварительно заданный промежуток времени, чтобы должным образом скорректировать значение скорости выхода ТС с полосы.
До тех пор, пока не будут получены новые данные с этапа визуализации, система использует имеющиеся данные. Для повышения точности система может выполнять предсказание полосы движения на текущий момент исходя из истории данных, даже если на этапе 8 больше не удается найти полосу.
Далее система переходит к этапу 15, на котором выполняется проверка, находится ли положение ТС в полосе в предварительно заданном диапазоне (не превышает ли значение сдвига предварительно заданный предел), а также находится ли скорость выхода ТС с полосы в предварительно заданном диапазоне (не превышает ли модуль скорости выхода ТС с полосы предварительно заданный предел). Предел сдвига может быть задан, например, равным 0,3 м и определяться погрешностью GNSS и определения положения ТС в полосе, а также предельно допустимым значением выезда с полосы, при котором предполагается, что колеса по-прежнему находятся на линии разметки или поблизости от нее, и вероятность ДТП мала. Предел скорости выхода ТС с полосы может быть предварительно задан, например, равным 1 м/с и определяться тем, намеренно ли при такой скорости обычно действует водитель, велика ли вероятность ДТП и контролирует ли ситуацию водитель.
Если проверки на этапе 15 показывают отсутствие выходов показателей за предварительно заданные пределы, система на этапе 16 отключает предупреждающий сигнал, если он ранее был включен, или ничего не делает, если он ранее не был включен, и продолжает контроль, переходя к этапу 2 (или к этапу 6). Далее, если новые данные визуализации еще не получены, система может пропускать этап 8 или использовать вместо этого данные предсказания визуализации.
Если проверки на этапе 15 показывают одновременное наличие выходов показателей за предварительно заданные пределы, система переходит к этапу 17, на котором проверяет, выполняется ли хотя бы одно из следующих условий: направление УП не совпадает с направлением выхода ТС из полосы или указатель поворота вообще выключен.
Если хотя бы одно из условий на этапе 17 выполняется, то это означает, что ТС непреднамеренно выходит из полосы, поэтому система переходит к этапу 18, на котором включает предупреждающий сигнал, если он ранее не был включен, и продолжает контроль, переходя к этапу 2 (или к этапу 6). Далее, если новые данные визуализации еще не получены, система может пропускать этап 8 или использовать вместо этого данные предсказания визуализации.
Если ни одно из условий на этапе 17 не выполняется, то это означает, что ТС преднамеренно выходит из полосы, поэтому система переходит к этапу 19, на котором отключает предупреждающий сигнал, если он ранее был включен, или ничего не делает, если он ранее не был включен, и продолжает контроль, переходя к этапу 2 (или к этапу 6). Далее, если новые данные визуализации еще не получены, система может пропускать этап 8 или использовать вместо этого данные предсказания визуализации.
Таким образом, обеспечивается система помощи водителю, обладающая повышенной точностью и обеспечивающая повышенную безопасность дорожного движения.
Блок-схема предложенной системы показана на Фиг.2. Обработчик 110, содержащий компьютер, принимает сигналы от камеры 120, от датчиков 150 ТС через шину CAN 130 и приемника GNSS 140, а также передает в шину CAN предупреждающие сигналы.
Система предупреждения съезда транспортного средства с полосы движения относится к системам помощи водителю и предназначена для слежения за правильным положением автомобиля на дороге и реализует звуковое и/или световое предупреждение водителя при ненамеренном съезде с полосы, предотвращая возможную аварийную ситуацию. Система предупреждает водителя в следующих случаях: при отсутствии включенного указателя поворота о пересечении транспортным средством видимой маркировки полосы движения на автодороге; о выходе из полосы движения в диапазоне от минимального порога скорости до максимального порога скорости транспортного средства; о возможном пересечении полосы движения при перемещении транспортного средства влево/вправо. Предусмотрена возможность отключения предупреждающих сигналов ручным способом. Коммуникация с бортовой электронной системой транспортного средства происходит посредством CAN, например, по протоколу SAE J1939.
Дополнительные особенности реализации
Один или более описанных в настоящем документе блоков или устройств передачи (передатчиков) и один или более блоков или устройств приема (приемников) физически могут быть реализованы в одном и том же блоке или устройстве приемопередачи или в разных блоках или устройствах.
Устройством или блоком передачи в данном документе для упрощения описания может называться устройство или блок, имеющий функции не только передачи, но и приема данных, информации и/или сигналов. Аналогичным образом, устройство или блок приема может также заключать в себе функции передачи данных, информации и/или сигналов.
Различные иллюстративные блоки и модули, описанные в связи с раскрытием сущности в данном документе, могут реализовываться или выполняться с помощью процессора общего назначения, процессора цифровых сигналов (DSP), специализированной интегральной схемы (ASIC), программируемой пользователем вентильной матрицы (FPGA) или другого программируемого логического устройства (PLD), дискретного логического элемента или транзисторной логики, дискретных аппаратных компонентов либо любой комбинации вышеозначенного, предназначенной для того, чтобы выполнять описанные в данном документе функции. Процессор общего назначения может представлять собой микропроцессор, но в альтернативном варианте, процессор может представлять собой любой традиционный процессор, контроллер, микроконтроллер или конечный автомат.Процессор также может реализовываться как комбинация вычислительных устройств (к примеру, комбинация DSP и микропроцессора, несколько микропроцессоров, один или более микропроцессоров вместе с DSP-ядром либо любая другая подобная конфигурация).
Некоторые блоки по отдельности или вместе могут представлять собой, например, компьютер, и включать в себя процессор, который сконфигурирован для вызова и выполнения компьютерных программ из памяти для выполнения этапов способа или функций блоков в соответствии с вариантами осуществления настоящего изобретения. Согласно вариантам осуществления, устройство может дополнительно включать в себя память. Процессор может вызывать и выполнять компьютерные программы из памяти для выполнения способа. Память может быть отдельным устройством, независимым от процессора, или может быть интегрирована в процессор. Память может хранить код, инструкции, команды и/или данные для исполнения на наборе из одного или более процессоров описанного устройства. Коды, инструкции, команды могут предписывать процессору выполнять этапы способа или функции устройства.
Функции, описанные в данном документе, могут реализовываться в аппаратном обеспечении, программном обеспечении, выполняемом посредством одного или более процессоров, микропрограммном обеспечении или в любой комбинации вышеозначенного. Аппаратные и программные средства, реализующие функции, также могут физически находиться в различных позициях, в том числе согласно такому распределению, что части функций реализуются в различных физических местоположениях, то есть может выполняться распределенная обработка или распределенные вычисления.
При необходимости (например, в случае если велик объем данных и/или вычислений, которые необходимо выполнить в отношении этих данных), может производиться многопоточная обработка данных, которая в простом представлении может выражаться в том, что все множество подлежащих обработке данных разделяется на набор подмножеств, и каждое ядро процессора выполняет обработку в отношении назначенного для него подмножества данных.
Вышеупомянутая память может быть энергозависимой или энергонезависимой памятью или может включать в себя как энергозависимую, так и энергонезависимую память. Специалисту в области техники должно быть также понятно, что, когда речь идет о памяти и о хранении данных, программ, кодов, инструкций, команд и т.п., подразумевается наличие машиночитаемого (или компьютерно-читаемого, процессорно-читаемого) запоминающего носителя. Машиночитаемые носители данных включают в себя как некратковременные компьютерные носители хранения данных, так и среду связи, включающую в себя любую передающую среду, которая упрощает перемещение компьютерной программы или ее части из одного места в другое. Некратковременный машиночитаемый запоминающий носитель может представлять собой любой доступный носитель, который может использоваться для того, чтобы переносить или сохранять требуемое средство программного кода в форме инструкций или структур данных, и к которому можно осуществлять доступ посредством компьютера, процессора или иного устройства обработки общего назначения или специального назначения.
В качестве примера, а не ограничения, машиночитаемые носители могут содержать постоянное запоминающее устройство (ROM), программируемое постоянное запоминающее устройство (PROM), стираемое программируемое постоянное запоминающее устройство (EPROM), электронно-стираемое программируемое постоянное запоминающее устройство (EEPROM), флэш-память, оперативную память (RAM), статическую память с произвольным доступом (SRAM), динамическую память с произвольным доступом (DRAM), синхронную динамическую память с произвольным доступом (SDRAM), синхронную динамическую память с произвольной выборкой с двойной скоростью передачи данных (DDR SDRAM), синхронную динамическую память с произвольной выборкой с повышенной скоростью (ESDRAM), DRAM с синхронной линией связи (SLDRAM) и оперативную память с шиной прямого доступа (DR RAM), регистр, кэш-память, полупроводниковые запоминающие устройства, магнитные носители, такие как внутренние жесткие диски и съемные диски, магнитооптические носители и оптические носители, такие как диски CD-ROM и цифровые универсальные диски (DVD), а также любые другие известные в уровне техники носители данных.
Информация и сигналы, описанные в данном документе, могут представляться с помощью любой из множества различных технологий. Например, данные, инструкции, команды, информация, сигналы, биты, символы и элементарные сигналы, которые могут приводиться в качестве примера в вышеприведенном описании, могут представляться посредством напряжений, токов, электромагнитных волн, магнитных полей или частиц, оптических полей или частиц либо любой комбинации вышеозначенного, если это применимо к настоящему изобретению.
Следует понимать, что хотя в настоящем документе для описания различных блоков, модулей, сетей, элементов, компонентов, областей, слоев и/или секций, могут использоваться такие термины, как "первый", "второй", "третий" и т.п., эти блоки, модули, сети, элементы, компоненты, области, слои и/или секции не должны ограничиваться этими терминами. Эти термины используются только для того, чтобы отличить один блок, модуль, сеть, элемент, компонент, область, слой или секцию от другого блока, модуля, сети, элемента, компонента, области, слоя или секции. Так, первый блок, модуль, сеть, элемент, компонент, область, слой или секция может быть назван вторым блоком, модулем, сетью, элементом, компонентом, областью, слоем или секцией без выхода за рамки объема настоящего изобретения. В настоящем описании термин "и/или" включает любые и все комбинации из одной или более из соответствующих перечисленных позиций. Элементы, упомянутые в единственном числе, не исключают множественности элементов, если отдельно не указано иное.
Функциональность элемента, указанного в описании или формуле изобретения как единый элемент, может быть реализована на практике посредством нескольких компонентов устройства, и наоборот, функциональность элементов, указанных в описании или формуле изобретения как несколько отдельных элементов, может быть реализована на практике посредством единого компонента.
Несмотря на то, что примерные варианты осуществления были подробно описаны и показаны на сопроводительных чертежах, следует понимать, что такие варианты осуществления являются лишь иллюстративными и не предназначены ограничивать настоящее изобретение, и что данное изобретение не должно ограничиваться конкретными показанными и описанными компоновками и конструкциями, поскольку специалисту в данной области техники на основе информации, изложенной в описании, и знаний уровня техники могут быть очевидны различные другие модификации и варианты осуществления изобретения, не выходящие за пределы сущности и объема данного изобретения.

Изобретение относится к системам регулирования движения дорожного транспорта, а именно, к системе помощи водителю для предотвращения съезда с полосы движения. Система помощи водителю содержит расположенный в транспортном средстве (ТС) обработчик, выполненный с возможностью получать значение текущей скорости ТС и значение указателей поворота от соответствующих датчиков ТС выполнять поиск разметки и полосы движения на основе изображений, полученных с камеры ТС, с помощью методов компьютерного зрения. Если направление указателя поворота не совпадает с направлением выхода ТС из полосы или указатель поворота не включен, выдавать предупреждающий сигнал о возможном съезде ТС с полосы движения. Повышается безопасность дорожного движения. 4 з.п. ф-лы, 2 ил., 1 табл.
1. Система помощи водителю, содержащая расположенный в транспортном средстве (ТС) обработчик, соединенный с шиной CAN ТС с возможностью обмена сигналами с шиной CAN и приема сигналов от датчиков ТС через шину CAN, соединенный с камерой ТС с возможностью приема сигналов от нее и соединенный с приемником глобальной навигационной спутниковой системы (GNSS) ТС с возможностью приема сигналов от него, при этом обработчик выполнен с возможностью:
получать значение текущей скорости ТС и значение указателей поворота от соответствующих датчиков ТС;
выполнять поиск разметки и полосы движения на основе изображений, полученных с камеры ТС, с помощью одного или более методов компьютерного зрения;
если скорость ТС находится в предварительно заданных пределах и если обнаружена полоса движения: вычислять положение ТС в полосе в виде сдвига ТС относительно полосы движения на основе местоположения и ориентации приемника GNSS на дороге, известных параметров ТС, а также места и ориентации установки приемника GNSS на ТС, и вычислять скорость выхода ТС с полосы на основе положения ТС в полосе и направления движения ТС относительно полосы;
если значение сдвига ТС относительно полосы движения превышает предварительно заданный предел и модуль скорости выхода ТС с полосы превышает предварительно заданный предел, проверять значение указателей поворота; и
если направление указателя поворота не совпадает с направлением выхода ТС из полосы или указатель поворота не включен, выдавать предупреждающий сигнал о возможном съезде ТС с полосы движения.
2. Система помощи водителю по п. 1, в которой, если скорость ТС находится в предварительно заданных пределах и если обнаружена полоса движения, обработчик дополнительно выполнен с возможностью повторно выполнять поиск разметки и полосы движения.
3. Система помощи водителю по п. 1, в которой обработчик дополнительно выполнен с возможностью, после получения значения текущей скорости ТС выполнять предсказание скорости движения, с которой будет двигаться ТС через предварительно заданный промежуток времени, соответствующий времени обработки на этапе поиска разметки и полосы движения, причем при проверке того, находится ли скорость ТС в предварительно заданных пределах, обработчик выполнен с возможностью использовать упомянутое предсказание скорости движения ТС через предварительно заданный промежуток времени.
4. Система помощи водителю по п. 3, в которой обработчик дополнительно выполнен с возможностью использовать упомянутое предсказание скорости движения ТС через предварительно заданный промежуток времени, чтобы корректировать значение скорости выхода ТС с полосы.
5. Система помощи водителю по п. 1, в которой, если на этапе поиска разметки и полосы движения не удалось найти полосу, обработчик дополнительно выполнен с возможностью выполнять предсказание полосы движения на данный момент на основе истории данных.
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581809C1 |
| СПОСОБ ПОМОЩИ ПРИ ВОЖДЕНИИ И СИСТЕМА ПОМОЩИ ПРИ ВОЖДЕНИИ | 2019 |
|
RU2778327C1 |
| Приспособление к конденсаторам и вариометрам для грубой и точной настройки | 1930 |
|
SU20160A1 |
| JP 6495971 B2, 03.04.2019. | |||

