1. Область техники, к которой относится изобретение
Изобретение относится к области спортивно-туристического инвентаря, а именно к роликовым конькам.
2. Уровень техники
Известны «Электрические гусеничные роликовые коньки» с портативными аккумуляторами. Источник информации Интернет
http://www.innoros.ru/news/foreign/16/03/gusenichnye-rolikovye-konki
Недостатком данного устройства является то, что направление движения меняется наклоном тела, изначально нарушающим равновесие. Скорость движения устанавливается дополнительными проводными устройствами - контролером и пультом управления в виде джойстика. Не предусмотрена возможность автоматического прекращения крутящего момента в нештатных ситуациях, что чревато травмированием пользователя и окружающих. Поэтому вынужденно ограничивается мощность двигателя. Отсутствие направляющего колеса затрудняет преодоление наиболее распространенных мелких неровностей грунта и небольших предметов на нем.
Указанный прототип «Электрические гусеничные роликовые коньки» является наиболее близким аналогом предлагаемого изобретения.
3. Раскрытие изобретения
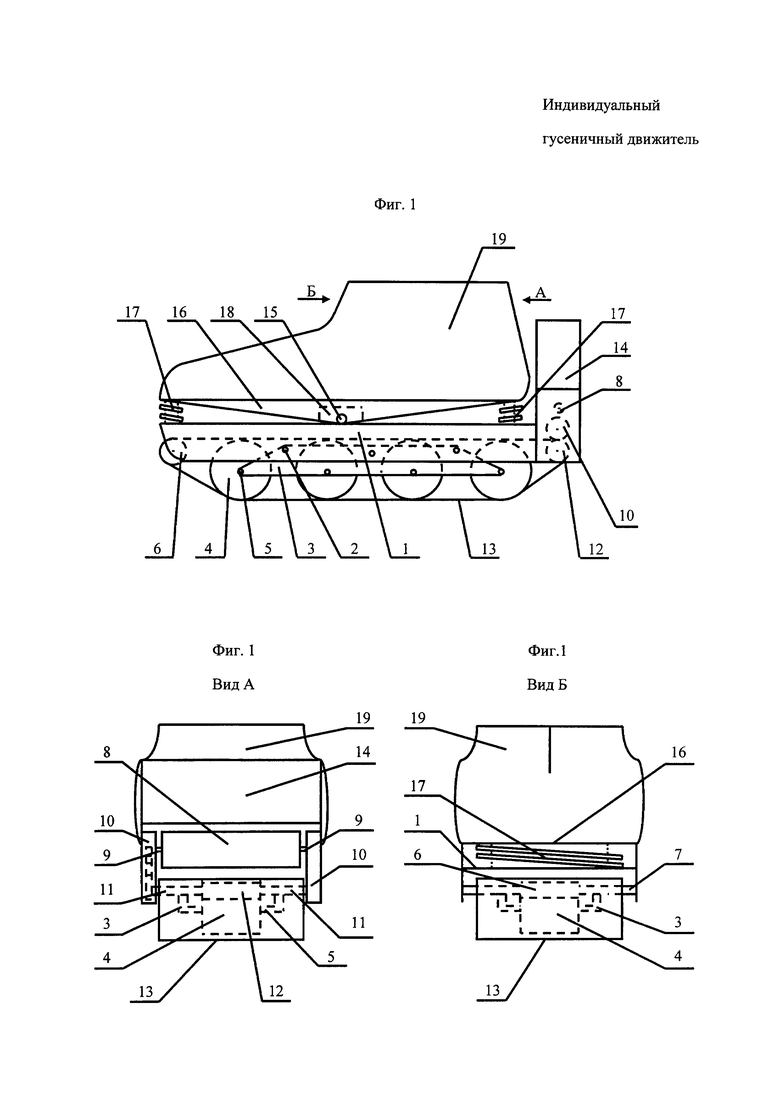
3.1. Сущность изобретения как технического решения поясняется Фиг. 1; Фиг 1. Вид А; Фиг. 1. Вид Б.
Индивидуальный гусеничный движитель состоит из пары имеющих стандартные размеры гусеничных роликовых коньков, левого и правого. Каждый из них имеет раму 1 в форме обращенного вниз швеллера. Снизу к раме 1 штифтами 2 жестко крепится каретка 3 со всеми конструктивно предусмотренными опорными катками 4, вращающимися на неподвижных жестко скрепленных с кареткой 3 осях 5. Спереди в носовой части к раме 1 крепится направляющее колесо 6, вращающееся на неподвижной жестко скрепленной с рамой 1 оси 7. К задней пяточной части рамы 1 крепится электродвигатель постоянного тока 8, имеющий вал ротора с двумя выступающими концами 9, передающими вращательный момент через редукторы 10 на ось 11, жестко соединенную с рабочим колесом 12. Над электродвигателем 8 размещаются источники питания аккумуляторы 14.
Опорные катки 4, направляющее колесо 6 и рабочее колесо 12 охватываются замкнутой гусеничной лентой 13 шириной в пределах рамы 1.
Сверху рамы 1 на оси 15 устанавливается ножная педаль 16, регулирующая направление и скорость движения. Ножная педаль 16 призматическими пружинами сжатия 17, а также пружинами сжатия и растяжения (не показаны) удерживается в горизонтальном положении относительно рамы 1. В полости ножной педали 16 размещается электрический переключатель с реостатом 18, реагирующий на изменение положения педали 16 относительно рамы 1. К ножной педали 16 крепится ботинок 19.
Техническим результатом предлагаемого изобретения является возможность ускоренного без применения физических усилий передвижения пользователя по любому грунту с помощью рефлекторно управляемого стопой ноги электропривода гусеничных роликовых коньков с портативными источниками питания.
3.2. Индивидуальный гусеничный движитель решает задачу ускоренного передвижения пользователя по любому грунту с помощью электропривода следующим способом.
При обычном выпрямленном положении тела пользователя с надетыми коньками ножная педаль 16 находится в горизонтальном положении относительно рамы 1. В этом положении электрическая цепь разомкнута, и движение не происходит.
Для движения вперед или назад пользователь переносит тяжесть тела на носок или пятку стопы. Ножная педаль 16 проворачивается на оси 15 и тем изменяет свое положение относительно рамы 1. Переключатель с реостатом 18 замыкает электрическую цепь в нужной полярности, увеличивая напряжение, а следовательно, и скорость движения, в зависимости от степени отклонения педали 16 относительно рамы 1.
Изменение направления и скорости движения посредством давления стопы на ножную педаль 16 соответствует рефлекторным реакциям организма на положение ног и тела в пространстве, не нарушает равновесие и высвобождает руки пользователя.
При перемене полярности электропитания происходит торможение движения, если оно перед этим осуществлялось.
Смена направления движения вбок производится как на обычных роликовых коньках путем поворота и перестановки ног.
Лестничные ступени, сложные и высокие препятствия преодолеваются путем переступания.
При отключенном электропитании можно двигаться обычным шагом или качением с помощью мускульной силы.
При движении под уклон возможна рекуперация электроэнергии.
Дополнительные источники питания аккумуляторы при необходимости могут размещаться на носке ботинка и на теле пользователя.
При отсутствии давления стопы на ножную педаль 16, например при подъеме ноги для преодоления препятствия или внезапном падении, пружины 17 автоматически возвращают ножную педаль 16 в горизонтальное по отношению к раме 1 положение. Электрическая цепь размыкается, и вращение гусеничной ленты прекращается. Это уберегает пользователя и окружающих от травм вращающимися деталями индивидуального гусеничного движителя в нештатных ситуациях, и конструктивно позволяет безопасно увеличивать мощность двигателя.
4. Краткое описание чертежей
4.1. На Фиг. 1 представлен вид сбоку.
Показаны:
- вама 1,
- штифты 2 крепления к раме 1 каретки 3,
- каретка 3,
- опорные катки 4 собранные в каретку 3,
- оси 5 опорных катков 4,
- направляющее колесо 6,
- электродвигатель 8,
- редуктор 10,
- рабочее колесо 12,
- гусеничная лента 13,
- источники питания аккумуляторы 14,
- ось 15,
- ножная педаль 16,
- призматические пружины сжатия 17,
- электрический переключатель с реостатом 18,
- ботинок 19.
4.2. На Фиг. 1. Вид А представлен вид сзади.
Показаны:
- каретка 3,
- опорные катки 4 собранные в каретку 3,
- оси 5 опорных катков 4,
- электродвигатель 8,
- выступающие концы 9 ротора электродвигателя,
- редукторы 10,
- ось рабочего колеса 11,
- рабочее колесо 12,
- гусеничная лента 13,
- источники питания аккумуляторы 14,
- ботинок 19.
4.3. На Фиг. 1. Вид Б представлен вид спереди.
Показаны:
- рама 1,
- каретка 3,
- опорные катки 4 собранные в каретку 3,
- направляющее колесо 6,
- ось направляющего колеса 7,
- гусеничная лента 13,
- ножная педаль 16,
- призматическая пружина сжатия 17,
- ботинок 19.
5. Осуществление изобретения
Индивидуальный гусеничный движитель состоит из обычных элементов и материалов, широко используемых при изготовлении роликовых коньков и электроприборов. Он может быть изготовлен по отработанным технологиям и штампам на любом предприятии по выпуску спортивного инвентаря.
В связи с тем, что Индивидуальный гусеничный движитель значительно отличается от прототипа, требуется проведение экспериментальной отработки образцов для подбора наиболее подходящих материалов, выработки инженерных и дизайнерских решений.
Источник информации
Интернет http://www.innoros.ru/news/foreign/16/03/gusenichnye-rolikovye-konki
| название | год | авторы | номер документа |
|---|---|---|---|
| РОЛИКОВЫЕ КОНЬКИ С ЭЛЕКТРОПРИВОДОМ | 2017 |
|
RU2660519C1 |
| ЗАЩИТНЫЙ РАЗГРУЗОЧНЫЙ ЖЕСТКИЙ БРОНЕКОМБИНЕЗОН | 2017 |
|
RU2669169C1 |
| ТРАНСПОРТНАЯ СИСТЕМА | 2017 |
|
RU2661412C1 |
| Нательное крепление для оружия | 2023 |
|
RU2832665C1 |
| ПОДВОДНЫЙ ДВИЖИТЕЛЬ | 2018 |
|
RU2753922C2 |
| ПЕДАЛЬНЫЙ ПРИВОД | 2003 |
|
RU2274576C2 |
| МУСКУЛЬНЫЙ ПРИВОД СТАРОВЕРОВА (ВАРИАНТЫ) | 2014 |
|
RU2560226C1 |
| СПАСАТЕЛЬНО-ДЕСАНТНОЕ УСТРОЙСТВО ВЕРТОЛЕТНОГО ТИПА С ЭЛЕКТРОПРИВОДОМ | 2017 |
|
RU2661203C1 |
| Гусеничный лежачий электроскутер | 2022 |
|
RU2793388C1 |
| РОЛИКОВЫЙ КОНЁК | 2016 |
|
RU2655689C2 |
Изобретение относится к области спортивно-туристического инвентаря, а именно к роликовым конькам. Индивидуальный гусеничный движитель содержит пару гусеничных роликовых коньков с электроприводом. Управление включением переднего и заднего хода, скоростью движения и торможением осуществляется ножной педалью, удерживаемой в горизонтальном положении с помощью призматических пружин сжатия, а также пружинами сжатия и растяжения, путем изменения ее положения относительно рамы рефлекторным без нарушения равновесия попеременным переносом тяжести тела на оконечности педали. В движителе предусмотрено автоматическое прекращение вращательного момента в нештатных ситуациях за счет разрыва электрической цепи при возвращении ножной педали в горизонтальное положение относительно рамы из-за отсутствия давления тела пользователя на нее. Достигается повышение проходимости и управляемости. 1 з.п. ф-лы, 3 ил.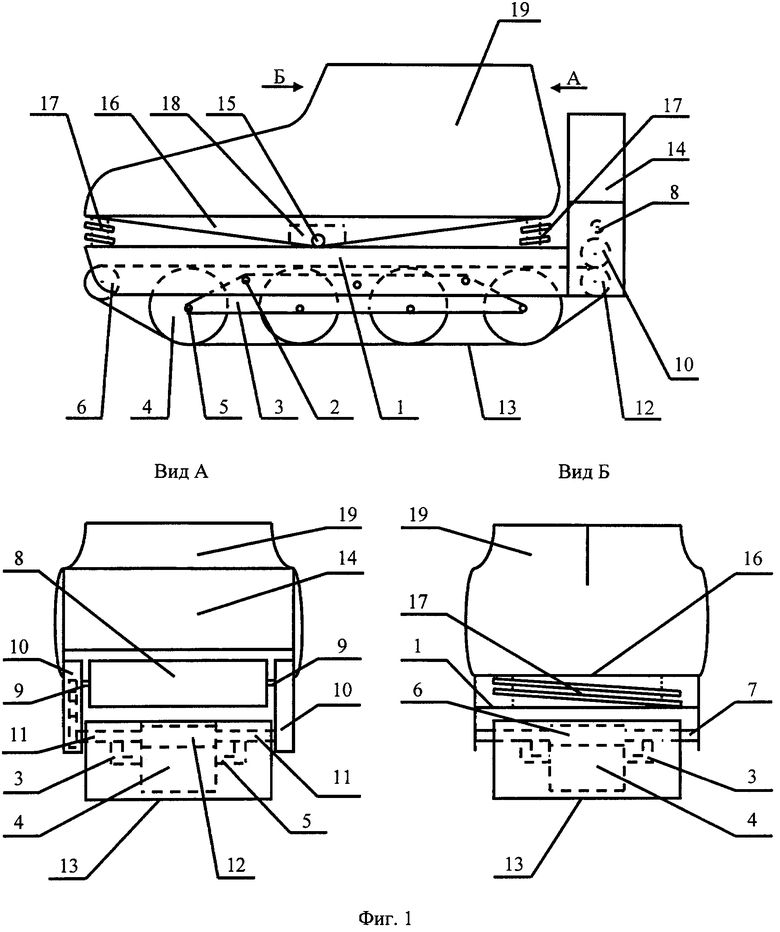
1. Индивидуальный гусеничный движитель, содержащий пару гусеничных роликовых коньков с электроприводом, отличающийся тем, что управление включением переднего и заднего хода, скоростью движения и торможением осуществляется ножной педалью, удерживаемой в горизонтальном положении с помощью призматических пружин сжатия, а также пружинами сжатия и растяжения, путем изменения положения ножной педали относительно рамы рефлекторным без нарушения равновесия попеременным переносом тяжести тела на оконечности педали.
2. Индивидуальный гусеничный движитель по п. 1, отличающийся тем, что в нем предусмотрено автоматическое прекращение вращательного момента в нештатных ситуациях за счет разрыва электрической цепи при возвращении ножной педали в горизонтальное положение относительно рамы из-за отсутствия давления тела пользователя на нее, что уменьшает риск травматизма и позволяет не ограничивать мощность электродвигателя.
| статья: Гусеничные роликовые коньки, 29.03.2016, http://www.innoros.ru/news/foreign/16/03/gusenichnye-rolikovye-konki | |||
| CN 102358370 A, 22.02.2012 | |||
| RU 2006124875 A, 20.01.2008 | |||
| СПОСОБ РАСПОЗНАВАНИЯ ГРАНИЧНОГО СЛОЯ С ИСПОЛЬЗОВАНИЕМ ЩИТОВОЙ КРЕПИ ДЛЯ ПОДЗЕМНЫХ ГОРНЫХ РАБОТ | 2007 |
|
RU2366815C2 |

