Область техники
[0001]
Настоящее изобретение относится к способу управления транспортным средством и оборудованию управления транспортным средством.
Уровень техники
[0002]
Раскрывается предшествующий уровень техники (см. Патентный документ 1), который подавляет странный шум торможения во время трогания путем вывода на ось, если во время остановки транспортного средства обнаруживается запрос на приведение в движение, движущей силы (приводная мощность), которая меньше движущей силы, основанной на запросе на приведение в движение.
Документы предшествующего уровня техники
Патентные документы
[0003]
Патентный документ 1: Публикация непрошедшей экспертизу патентной заявки Японии №. 2007-168650
Сущность изобретения
Проблемы, решаемые изобретением
[0004]
Однако использование вышеупомянутого известного уровня техники приводит к уменьшению движущей силы во время трогания и, следовательно, вызывает проблему ухудшения характеристик ускорения во время трогания.
[0005]
Принимая во внимание вышеупомянутую проблему, задачей настоящего изобретения является создание способа управления транспортным средством и устройства управления транспортным средством, способных улучшить характеристики ускорения при трогании транспортного средства, которое остановлено.
Средства для решения проблем
[0006]
Способ управления транспортным средством в соответствии с аспектом настоящего изобретения ограничивает, во время трогания транспортного средства, если транспортное средство останавливается даже без операции торможения транспортного средства, движущую силу, которая должна быть сформирована до фактического трогания транспортного средства, до или ниже предварительно заданной максимальной движущей силы.
ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0007]
Согласно настоящему изобретению характеристики ускорения во время трогания транспортного средства, которое остановлено, могут быть улучшены.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
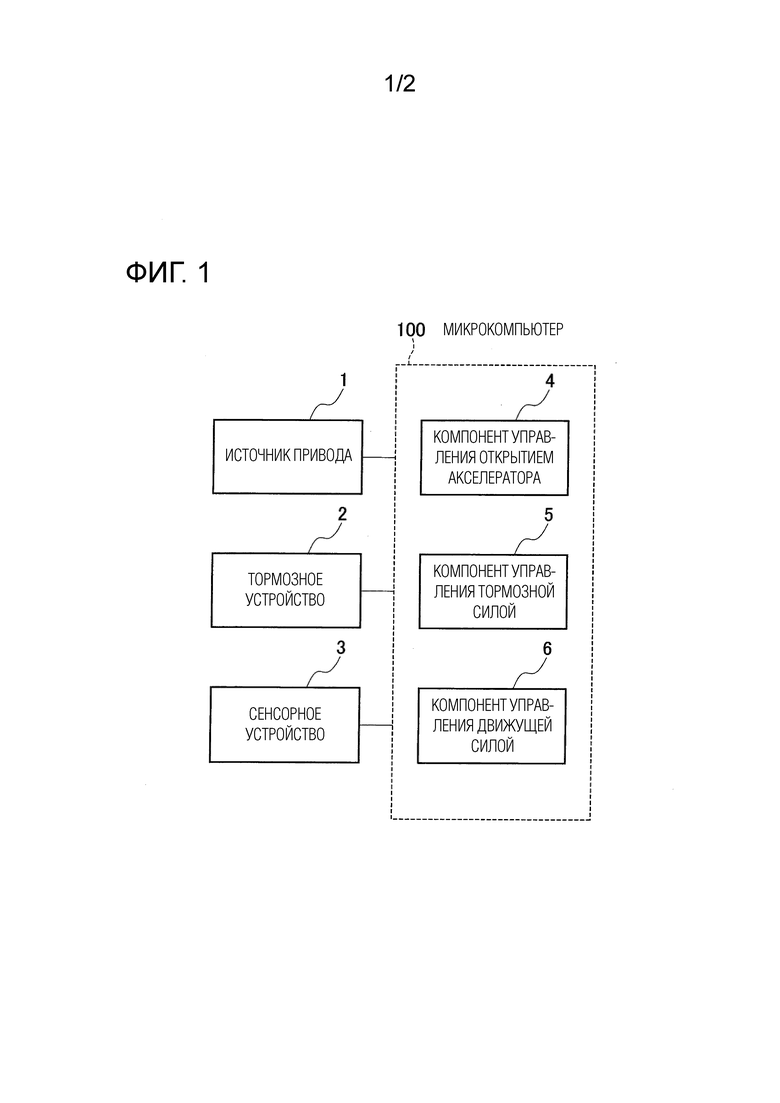
Фиг.1 - это блок-схема, иллюстрирующая часть транспортного средства и оборудование управления транспортным средством в соответствии с вариантом осуществления настоящего изобретения.
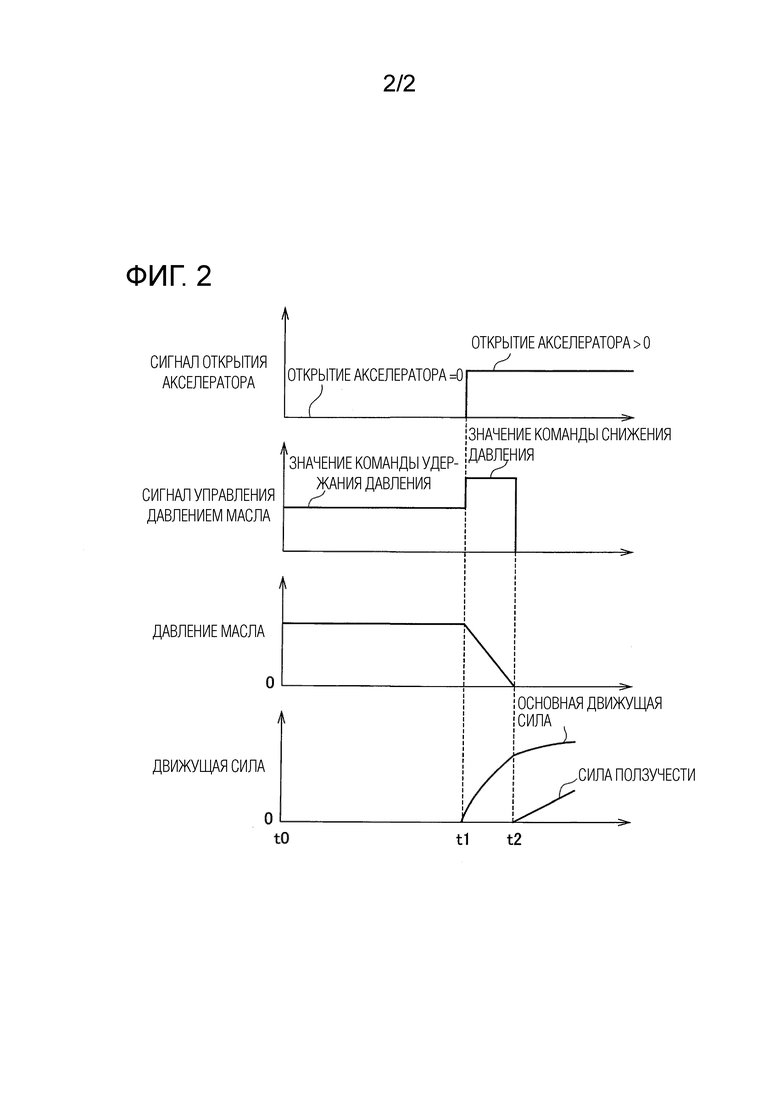
Фиг.2 - временная диаграмма, иллюстрирующая временные изменения в сигнале открытия акселератора, указывающем открытие акселератора, сигнал управления давлением масла для управления давлением масла тормозного устройства, давление масла тормозного устройства и движущую силу.
РЕЖИМ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0009]
Со ссылкой на чертежи варианты осуществления настоящего изобретения будут объяснены подробно. В объяснении одинаковые части представлены одинаковыми ссылочными позициями, чтобы пропустить повторное объяснение.
[0010]
Как показано на фиг.1, транспортное средство в соответствии с вариантом осуществления снабжено источником 1 привода (приведения в движение), тормозным устройством 2, сенсорным устройством 3 и микрокомпьютером 100. Далее транспортное средство, показанное на фиг.1, называется собственным транспортным средством.
Источником 1 привода в данном документе является электромотор, и аккумулятор для подачи электрической энергией на источник 1 привода (электромотор) может заряжаться, например, электрической энергией, генерируемой вращением генератора посредством двигателя внутреннего сгорания. Кстати, источником 1 привода может быть сам двигатель внутреннего сгорания.
[0011]
Тормозное устройство 2 - это устройство, которое в основном работает в соответствии с операцией торможения водителем, и в данном документе представляет собой гидравлическое тормозное устройство. Тормозное устройство 2 работает, управляя давлением масла, даже без действия тормоза водителем. Тормозное устройство 2 принимает сигнал управления давлением масла для управления давлением масла тормозного устройства 2 и в соответствии с сигналом управления давлением масла управляет тормозной силой. Сигнал управления давлением масла установлен на одно из значения, указывающего, что давление масла должно поддерживаться (называемое значением команды удержания давления), и значения, указывающего, что давление масла должно быть уменьшено (называемое значением команды снижения давления). В случае значения команды удержания давления тормозное устройство 2 удерживает давление масла, чтобы приложить тормозную силу к транспортному средству, и в случае значения инструкции уменьшения давления уменьшает давление масла, чтобы уменьшить тормозную силу с течением времени, и вскоре обнулит тормозную силу.
[0012]
Сенсорное устройство 3 включает в себя множество различных типов датчиков обнаружения объектов, таких как лазерный радар, радар миллиметрового диапазона и камера, установленная на собственном транспортном средстве для обнаружения объектов вокруг собственного транспортного средства. Сенсорное устройство 3 использует множество датчиков обнаружения объектов и обнаруживает объекты вокруг собственного транспортного средства.
Также сенсорное устройство 3 обнаруживает внутреннее состояние собственного транспортного средства с помощью датчиков различного типа, установленных в собственном транспортном средстве.
[0013]
Здесь предполагается, что сенсорное устройство 3 способно измерять (1) коэффициент трения μ поверхности дороги в положении собственного транспортного средства, (2) вес W собственного транспортного средства, (3) количество людей N в собственном транспортном средстве (4) нагрузка Т собственного транспортного средства и (5) внутреннее давление p шины собственного транспортного средства. Кроме того, предполагается, что он способен измерять (6) градиент U наклона вверх поверхности дороги, (7) градиент D наклона вниз поверхности дороги, (8) скорость ветра aw, которую собственное транспортное средство получает спереди, и (9) скорость ветра fw, которую собственное транспортное средство получает сзади.
[0014]
Микрокомпьютер 100 соответствует оборудованию управления транспортным средством согласно варианту осуществления и включает в себя компонент 4 управления открытием акселератора для генерации сигнала открытия акселератора, который указывает на открытие акселератора (далее называемого открытием акселератора) собственного транспортного средства, компонент 5 управления тормозной силой для формирования сигнала управления давлением масла для управления давлением масла в тормозном устройстве 2 и компонент 6 управления движущей силой для управления движущей силой (крутящим моментом), создаваемой источником 1 привода. Компонент 5 управления тормозной силой также функционирует в качестве устройства удержания тормоза, которое поддерживает работу тормозного устройства 2, даже если водитель останавливает операцию торможения и освобождает работу тормозного устройства 2, когда водитель выполняет операцию трогания.
[0015]
Микрокомпьютер 100 является микрокомпьютером общего назначения, снабженным CPU (центральным процессором), памятью и компонентом ввода/вывода. Микрокомпьютер 100 установлен с компьютерной программой (программой управления транспортным средством) для функционирования в качестве оборудования управления транспортным средством. Выполняя компьютерную программу, микрокомпьютер 100 функционирует как множество схем обработки информации (4-6). Множество схем обработки информации (4-6), поясненных здесь, являются примерами, которые реализуются программным обеспечением. Естественно, можно подготовить аппаратные средства исключительного использования для выполнения упомянутых ниже информационных процессов, чтобы они составляли схемы обработки информации (4-6). Кроме того, множество схем обработки информации (4-6) может быть сформировано из отдельных аппаратных частей. Кроме того, схемы обработки информации (4-6) могут быть общими с электронными блоками управления (ECU), используемыми для других целей управления, касающихся транспортного средства.
[0016]
Компонент 4 управления открытием акселератора генерирует сигнал открытия акселератора, указывающий открытие акселератора, соответствующее величине нажатия педали акселератора собственного транспортного средства. Здесь компонент 4 управления открытием акселератора выполнен с возможностью генерирования сигнала открытия акселератора, указывающего требуемое открытие акселератора, даже когда собственное транспортное средство находится в режиме автоматического вождения.
[0017]
Компонент 5 управления тормозной силой выводит сигнал управления давлением масла, и когда водитель собственного транспортного средства выполняет операцию торможения, этот сигнал управления маслом указывает значение команды удержания давления для поддержания давления масла тормозного устройства 2. Здесь, даже когда водитель собственного транспортного средства не выполняет операцию торможения, сигнал управления давлением масла указывает значение команды удержания давления, если выполнены предварительно определенные условия.
[0018]
Например, когда собственное транспортное средство находится в режиме автоматического вождения, сигнал управления давлением масла указывает значение команды удержания давления в случае необходимости в тормозной силе. Точнее, сигнал управления давлением масла указывает значение команды удержания давления, если тормозная сила необходима при последующем движении во время автоматического вождения по перегруженной дороге.
[0019]
Кроме того, в некоторых случаях сигнал управления давлением масла указывает значение команды удержания давления, даже когда нога находится вдали от педали тормоза на склоне или тому подобном. Кроме того, в некоторых случаях сигнал управления давлением масла сохраняет значение команды удержания давления, когда педаль тормоза работает в течение заданного времени или дольше во время ожидания сигнала светофора и т.п., даже если нога снята с педали тормоза. Кроме того, когда открытие акселератора изменяется от 0 (ноль) до более 0 (ноль), т.е. во время запроса на трогание, сигнал управления давлением масла переключается со значения команды давления масла на значение команды снижения давления для уменьшения давления масла в тормозном устройстве 2.
[0020]
Компонент 6 управления движущей силой управляет источником 1 привода таким образом, что, хотя открытие акселератора превышает 0, то есть, когда имеется запрос на трогание, источник 1 привода генерирует движущую силу, соответствующую открытию акселератора. В настоящем документе эта движущая сила называется «главной движущей силой».
[0021]
Кроме того, компонент 6 управления движущей силой управляет источником 1 привода таким образом, что, если трансмиссия собственного транспортного средства не является нейтральной, даже когда открытие акселератора равно 0, источник 1 привода генерирует движущую силу. А именно, компонент 6 управления движущей силой управляет источником 1 привода, чтобы генерировать движущую силу даже до того, как собственное транспортное средство фактически трогается. Это делается, например, для того, чтобы люди в транспортном средстве чувствовали силу, подобную силе ползучести, которая генерируется во время холостого хода двигателя внутреннего сгорания в транспортном средстве, установленном с двигателем внутреннего сгорания и гидротрансформатором. В соответствии с этим эта движущая сила называется «силой ползучести».
[0022]
И компонент 6 управления движущей силой управляет силой ползучести, равной или меньшей, чем предварительно определенная максимальная движущая сила, в течение периода, пока тормозная сила не уменьшится до предварительно определенного порогового значения тормозной силы или ниже. Здесь пороговое значение тормозной силы считается равным 0 (ноль), а максимальная движущая сила 0 (ноль). При этом во время генерации тормозной силы генерация силы ползучести подавляется. Кстати, пороговое значение тормозной силы не ограничено 0 (ноль). Кроме того, максимальная движущая сила не ограничена 0 (ноль). Например, они могут быть установлены в соответствии со степенью толчка, испытываемого людьми в собственном транспортном средстве из-за колебаний ускорения (G) во время трогания, или в соответствии с требуемыми характеристиками ускорения.
[0023]
Со ссылкой на фиг.2 работа собственного транспортного средства будет объяснена во временной последовательности. Здесь предполагается, что трансмиссия собственного транспортного средства настроена на движение вперед, а не на нейтральную передачу.
[0024]
Как показано на фиг.2, в момент времени t0 водитель собственного транспортного средства не задействует акселератор, и сигнал открытия акселератора указывает, что открытие акселератора равно 0. Кроме того, в момент времени t0 водитель не задействует тормоз, но управляющий сигнал давления масла указывает значение команды удержания давления. А именно, компонент 5 управления тормозной силой действует как устройство удержания тормоза, так что давление масла в тормозном устройстве 2 поддерживается. А именно, тормозное устройство 2 поддерживает тормозную силу, даже если не происходит операции торможения собственного транспортного средства, тем самым поддерживая собственное транспортное средство остановленным.
[0025]
Кстати, даже когда собственное транспортное средство находится в режиме автоматического вождения, если сигнал управления давлением масла указывает значение команды удержания давления, то есть если компонент 5 управления тормозной силой работает в качестве устройства удержания тормоза, давление масла и тормозная сила поддерживаются, чтобы остановить собственное транспортное средство.
[0026]
Кроме того, в момент времени t0 открытие акселератора равно 0 (нулю), и, следовательно, основная движущая сила равна 0 (нулю), а сила ползучести также равна 0 (нулю), поскольку давление масла не равно 0 (нулю) и обеспечивается тормозная сила.
[0027]
Здесь, в момент времени t1 после момента времени t0, предполагается, что открытие акселератора изменяется от 0 (ноль) до более 0 (ноль).
[0028]
В момент времени t1 управляющий сигнал давления масла изменяется со значения команды удержания давления на значение команды снижения давления. При этом давление масла в тормозном устройстве 2 начинает уменьшаться.
[0029]
С другой стороны, в момент времени t1 основная движущая сила начинает увеличиваться, и собственное транспортное средство трогается. А именно, без уменьшения основной движущей силы, основная движущая сила, соответствующая открытию акселератора, применяется к собственному транспортному средству, и, следовательно, эффективность ускорения во время трогания остановленного собственного транспортного средства может быть улучшена. В случае автоматического вождения без использования операции акселератора водителя собственное транспортное средство трогается, и в этом случае также могут быть улучшены характеристики ускорения.
[0030]
В момент времени t1 давление масла больше 0 (ноль), то есть тормозная сила больше, чем пороговое значение тормозной силы, и, следовательно, сила ползучести равна 0 (ноль). Соответственно, для людей в собственном транспортном средстве нет никакого толчка из-за колебаний ускорения во время трогания (G), и трогание является плавным. Например, как следование во время автоматического вождения по перегруженной дороге, даже в ситуации, когда люди легко испытывают толчок во время трогания, толчок во время трогания может быть подавлен без ущерба для характеристик ускорения.
[0031]
И в момент времени t2 после момента времени t1 давление масла в тормозном устройстве 2 становится равным 0 (нулю), то есть тормозная сила уменьшается до или ниже порогового значения тормозной силы. Уменьшение тормозной силы до или ниже порогового значения тормозной силы приводит к созданию силы ползучести, и сила ползучести увеличивается с течением времени. Кроме того, после прохождения времени t2 увеличение (градиент по времени) основной движущей силы в единицу времени становится меньше, чем до момента времени t2. При этом увеличение общей движущей силы, включая силу ползучести (сумма основной движущей силы и силы ползучести), за единицу времени, регулируется так, чтобы быть примерно одинаковым до и после момента времени t2. Соответственно, можно не заставлять людей в собственном транспортном средстве испытывать толчок в момент времени t2 из-за силы ползучести. Здесь, даже если увеличение общей движущей силы в единицу времени изменяется до некоторой степени до и после момента времени t2, собственное транспортное средство уже трогается в момент времени t2, и, следовательно, вряд ли будет ощущаться толчок, вызванный силой ползучести.
[0032]
Кроме того, когда запрошенное значение движущей силы, соответствующее открытию акселератора, увеличивается, пороговое значение тормозной силы может быть увеличено для раннего генерирования силы ползучести, чтобы тем самым на раннем этапе получить, в сочетании с основной движущей силой, высокую характеристику ускорения. Кроме того, если запрошенное значение движущей силы мало, вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, может быть уменьшена.
[0033]
Кроме того, уменьшение в единицу времени давления масла может быть увеличено, чтобы быстро прекратить тормозную силу, тем самым дополнительно улучшая характеристики ускорения. Например, когда запрошенное значение движущей силы увеличивается, уменьшение в единицу времени тормозной силы увеличивается. Благодаря этому можно повысить характеристика ускорения. Кроме того, если запрошенное значение движущей силы мало, вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, может быть уменьшена.
[0034]
Например, по сравнению со случаем, когда водитель прекращает операцию торможения для уменьшения тормозной силы, устройство удержания тормоза сохраняет тормозную силу, даже если водитель останавливает операцию торможения, и когда эта тормозная сила освобождается и уменьшается, уменьшение тормозной силы в единицу времени сделано меньшим. При этом вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, может быть уменьшена. С другой стороны, когда водитель прекращает операцию торможения и толчок почти не ощущается, характеристики ускорения могут быть улучшены.
[0035]
Здесь будет объяснено трогание из ситуации, когда тормозное устройство 2 работает в соответствии с операцией торможения водителя, по сравнению с операцией по фиг.2.
[0036]
Отличия от операции, показанной на фиг. 2, заключаются в том, что, когда водитель останавливает операцию торможения, управляющий сигнал давления масла изменяется со значения команды удержания давления на значение команды снижения давления, что, когда водитель выполняет операцию акселератора (операция трогания), открытие акселератора изменяется от 0 (ноль) до более 0 (ноль), и что сила ползучести возникает до того, как транспортное средство фактически трогается.
Предпочтительно сила ползучести, создаваемая до фактического трогания транспортного средства, задается так, чтобы она превышала максимальную движущую силу. Например, даже до того, как тормозная сила уменьшится до или ниже порогового значения тормозной силы, создается сила ползучести, и величина силы ползучести устанавливается так, чтобы она превышала максимальную движущую силу.
[0037]
А именно, когда транспортное средство трогается согласно отпусканию тормоза и работе акселератора, выполняемой водителем, водитель едва испытывает толчок во время трогания, и, следовательно, увеличение силы ползучести выше максимальной движущей силы может улучшить характеристики ускорения в большей степени, чем в случае, если толчок при трогании легко ощущается. А именно, можно отразить намерение водителя по ускорению на характеристику трогания.
[0038]
Как упомянуто выше, согласно варианту осуществления, во время трогания собственного транспортного средства (t1), если собственное транспортное средство остановлено без операции торможения собственного транспортного средства, движущая сила (сила ползучести), генерируемая до фактического трогания собственного транспортного средства, ограничена до или ниже предварительно определенной максимальной движущей силы.
[0039]
А именно, без уменьшения основной движущей силы ограничивается только сила ползучести, тем самым улучшая характеристики ускорения во время трогания собственного транспортного средства, которое остановлено. Кроме того, когда собственное транспортное средство останавливается без операции торможения собственного транспортного средства, высока вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания. Однако ограничение силы ползучести может снизить вероятность ощущения толчка. А именно, колебание движущей силы из-за силы ползучести может быть подавлено, и, кроме того, может быть улучшена характеристика ускорения, тем самым улучшая характеристику трогания.
Например, если будет уменьшаться только наклон подъема движущей силы, внезапное уменьшение тормозной силы вызовет резкое увеличение движущей силы. Однако, как и в варианте осуществления, до тех пор, пока тормозная сила не уменьшится до или ниже порогового значения тормозной силы, сила ползучести ограничивается до максимальной движущей силы или ниже, а когда тормозная сила уменьшается до или ниже порогового значения тормозной силы, ограничение снимается, тем самым предотвращая резкое уменьшение тормозной силы от резкого увеличения движущей силы.
[0040]
Кроме того, собственное транспортное средство снабжено тормозным устройством 2, которое работает в соответствии с операцией торможения водителем, и устройством удержания тормоза (компонент 5 управления тормозной силой), которое поддерживает работу тормозного устройства 2, даже если водитель останавливает операцию торможения, и отключает работу тормозного устройства 2, когда водитель выполняет операцию трогания.
[0041]
И когда устройство удержания тормоза действует (когда устройство удержания тормоза отпускает тормоз), движущая сила (сила ползучести) ограничивается до максимальной движущей силы или ниже, и когда тормозное устройство 2 действует на основе операции торможения посредством водителя, движущая сила (сила ползучести) увеличивается больше, чем максимальная движущая сила.
[0042]
А именно, неясно, когда водитель прекращает операцию торможения, и, следовательно, движущая сила (сила ползучести) увеличивается больше, чем максимальная движущая сила, чтобы улучшить отзывчивость. С другой стороны, когда устройство удержания тормоза действует, толчок во время трогания может быть подавлен, и характеристика ускорения может быть улучшена.
[0043]
Кроме того, при трогании из состояния, в котором действует устройство удержания тормоза, до тех пор, пока тормозная сила тормозного устройства 2 не снизится до или ниже порогового значения тормозной силы, движущая сила (сила ползучести) ограничивается до или ниже максимальной дижущей силы. С другой стороны, при трогании из состояния, когда тормозное устройство 2 действует на основе операции торможения водителем, движущая сила (сила ползучести) увеличивается больше, чем максимальная движущая сила.
[0044]
А именно, неясно, когда водитель прекращает операцию торможения, и, следовательно, движущая сила (сила ползучести) увеличивается больше, чем максимальная движущая сила, чтобы улучшить отзывчивость. С другой стороны, когда нет намерения водителя трогаться, подавление толчка во время трогания может быть подчеркнуто.
[0045]
Кроме того, после окончания ограничения движущей силы (силы ползучести), движущая сила (сила ползучести) увеличивается с течением времени, чтобы улучшить характеристики ускорения после трогания с помощью основной движущей силы, то есть, чтобы дополнительно улучшить характеристики ускорения в то время, когда толчок при трогании почти не ощущается.
[0046]
Кроме того, использование электромотора в качестве источника 1 привода собственного транспортного средства может эффективно использовать ускоряющую способность электромотора, которая выше, чем у двигателя внутреннего сгорания, тем самым улучшая характеристики ускорения собственного транспортного средства.
[0047]
Между прочим, тормозное устройство 2 может быть тормозным устройством, отличным от типа устройства с давлением масла. Если его тормозная сила регулируется подобно вышеупомянутой тормозной силе давления масла, то достигается эффект, подобный эффекту варианта осуществления.
[0048]
(Варианты)
Модификации варианта осуществления будут объяснены. Среди множества модификаций, объясненных ниже, те, которые могут быть объединены друг с другом, могут быть объединены для реализации.
[0049]
Модификации А1-А7 выявляют факторы, влияющие на трогание собственного транспортного средства, и в соответствии с этими факторами управляют увеличением движущей силы (силы ползучести) в единицу времени. При этом факторы могут быть отражены в увеличении движущей силы (сила ползучести) в единицу времени, чтобы более точно управлять характеристиками во время трогания собственного транспортного средства.
[0050]
Модификации от B1 до B7 определяют факторы, влияющие на трогание собственного транспортного средства, и в соответствии с факторами устанавливают максимальную движущую силу. При этом факторы могут быть отражены на максимальной движущей силе, чтобы более точно управлять характеристиками во время трогания собственного транспортного средства.
[0051]
Модификации C1-C7 обнаруживают факторы, влияющие на трогание собственного транспортного средства, и в соответствии с этими факторами управляют тормозной силой тормозного устройства 2. При этом факторы могут быть отражены на тормозной силе, чтобы более точно управлять характеристиками во время трогания собственного транспортного средства.
[0052]
(Модификация А1)
В модификации A1 сенсорное устройство 3 в качестве внешней силы, препятствующей троганию собственного транспортного средства, обнаруживает коэффициент трения μ поверхности дороги в положении собственного транспортного средства.
[0053]
И после окончания ограничения движущей силы, то есть после момента времени t2 на фиг.2, компонент 6 управления движущей силой увеличивает силу ползучести с течением времени и усиливает увеличение (тенденцию к увеличению) силы ползучести в единицу времени, по мере того как величина коэффициента трения μ становится больше.
[0054]
А именно, чем больше коэффициент трения μ (внешняя сила, препятствующая троганию собственного транспортного средства), тем больше увеличение силы ползучести в единицу времени. Соответственно, вместе с основной движущей силой характеристика ускорения может быть дополнительно улучшена.
[0055]
Кроме того, если коэффициент трения μ мал, увеличение силы ползучести в единицу времени также мало, и, следовательно, вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, может быть уменьшена. Кроме того, можно предотвратить инцидент, когда собственное транспортное средство трогается, словно делая рывок вперед.
[0056]
(Модификация А2)
В модификации A2 сенсорное устройство 3 обнаруживает в качестве внешней силы, препятствующей троганию собственного транспортного средства, вес W собственного транспортного средства. Вместо веса W может быть обнаружено количество людей N в собственном транспортном средстве или нагрузка T.
[0057]
И после окончания ограничения движущей силы, то есть после момента времени t2 на фиг.2, компонент 6 управления движущей силой увеличивает силу ползучести с течением времени и усиливает увеличение силы ползучести в единицу времени, по мере того как вес W (или количество человек N или нагрузка T) увеличивается.
[0058]
А именно, чем больше внешняя сила, препятствующая троганию собственного транспортного средства, тем больше увеличение силы ползучести в единицу времени. Соответственно, вместе с основной движущей силой характеристика ускорения может быть дополнительно улучшена.
[0059]
Кроме того, если вес W (или количество людей N или нагрузка T) мал, увеличение силы ползучести в единицу времени также мало, и, следовательно, вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, можно уменьшить. Кроме того, можно предотвратить инцидент, когда собственное транспортное средство трогается, словно делая рывок вперед.
[0060]
(Модификация А3)
В модификации A3 сенсорное устройство 3 измеряет, для простоты трогания собственного транспортного средства, давление p в шинах собственного транспортного средства.
[0061]
И после окончания ограничения движущей силы, то есть после момента времени t2 на фиг.2, компонент 6 управления движущей силой увеличивает силу ползучести с течением времени и делает увеличение силы ползучести в единицу времени меньшим, по мере того как давление р становится выше.
[0062]
А именно, чем больше давление p (легкость трогания собственного транспортного средства), тем меньше увеличение силы ползучести в единицу времени, чтобы предотвратить внезапное увеличение ускорения после окончания ограничения движущей силы. Соответственно, характеристика ускорения может быть дополнительно улучшена, и вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, может быть уменьшена. Кроме того, можно предотвратить инцидент, когда собственное транспортное средство трогается, словно делая рывок вперед.
[0063]
Кроме того, когда давление p мало, увеличение силы ползучести в единицу времени становится больше, тем самым дополнительно улучшая характеристики ускорения.
[0064]
(Модификация А4)
В модификации А4 сенсорное устройство 3 в качестве внешней силы, препятствующей троганию собственного транспортного средства, измеряет градиент U наклона вверх поверхности дороги. Градиент U наклона вверх измеряется с помощью датчика ускорения.
[0065]
И после окончания ограничения движущей силы, то есть после момента времени t2 на фиг.2, компонент 6 управления движущей силой увеличивает силу ползучести с течением времени и усиливает увеличение силы ползучести в единицу времени, по мере того как градиент U наклона вверх становится больше.
[0066]
А именно, чем больше градиент U наклона вверх (внешняя сила, препятствующая троганию собственного транспортного средства), тем больше увеличение силы ползучести в единицу времени. Соответственно, вместе с основной движущей силой характеристика ускорения может быть дополнительно улучшена. Кроме того, это может предотвратить скольжение собственного транспортного средства назад.
[0067]
Кроме того, если градиент U наклона вверх мал, увеличение силы ползучести в единицу времени также мало, и, следовательно, вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, может быть уменьшена. Кроме того, можно предотвратить инцидент, когда собственное транспортное средство трогается, словно делая рывок вперед.
[0068]
(Модификация А5)
В модификации A5 сенсорное устройство 3 в качестве внешней силы, препятствующей троганию собственного транспортного средства, измеряет скорость ветра aw ветра, который собственное транспортное средство принимает спереди.
[0069]
И после окончания ограничения движущей силы, то есть после момента времени t2 по фиг.2, компонент 6 управления движущей силой увеличивает силу ползучести с течением времени и усиливает увеличение силы ползучести в единицу времени по мере того как скорость ветра аw увеличивается.
[0070]
А именно, чем больше скорость ветра aw (внешняя сила, препятствующая троганию собственного транспортного средства), тем больше увеличение силы ползучести в единицу времени. Соответственно, вместе с основной движущей силой характеристика ускорения может быть дополнительно улучшена.
[0071]
Кроме того, если скорость ветра aw мала, увеличение силы ползучести в единицу времени также мало, и, следовательно, вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, может быть уменьшена. Кроме того, можно предотвратить инцидент, когда собственное транспортное средство трогается, словно делая рывок вперед.
[0072]
(Модификация А6)
В модификации A6 сенсорное устройство 3 измеряет в качестве внешней силы, ускоряющей трогание собственного транспортного средства, градиент D наклона вниз поверхности дороги. Градиент D наклона вниз можно измерить с помощью датчика ускорения.
[0073]
И после окончания ограничения движущей силы, то есть после момента времени t2 на фиг.2, компонент 6 управления движущей силой увеличивает силу ползучести с течением времени и делает увеличение силы ползучести в единицу времени меньшим по мере того как градиент D наклона вниз увеличивается.
[0074]
А именно, чем больше градиент D наклона вниз (внешняя сила, ускоряющая трогание собственного транспортного средства), тем меньше увеличение силы ползучести в единицу времени. Соответственно, вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, может быть уменьшена. Кроме того, можно предотвратить инцидент, когда собственное транспортное средство трогается, словно делая рывок вперед.
[0075]
Кроме того, если градиент D наклона вниз мал, увеличение силы ползучести в единицу времени делается большим для дополнительного улучшения характеристики ускорения.
[0076]
(Модификация А7)
В модификации A7 сенсорное устройство 3 измеряет в качестве внешней силы, ускоряющей трогание собственного транспортного средства, скорость ветра fw, который собственное транспортное средство принимает сзади.
[0077]
И после окончания ограничения движущей силы, то есть после момента времени t2 на фиг.2, компонент 6 управления движущей силой увеличивает силу ползучести с течением времени и уменьшает увеличение силы ползучести в единицу времени по мере того как скорость ветра fw увеличивается.
[0078]
А именно, чем больше скорость ветра fw (внешняя сила, ускоряющая трогание собственного транспортного средства), тем меньше увеличение силы ползучести в единицу времени. Соответственно, вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, может быть уменьшена. Кроме того, можно предотвратить инцидент, когда собственное транспортное средство трогается, словно делая рывок вперед.
[0079]
Кроме того, если скорость ветра fw мала, увеличение силы ползучести в единицу времени является большим для дополнительного улучшения характеристики ускорения.
[0080]
(Модификация B1)
В модификации B1 сенсорное устройство 3 в качестве внешней силы, препятствующей троганию собственного транспортного средства, измеряет коэффициент трения μ поверхности дороги в положении собственного транспортного средства.
[0081]
И, когда коэффициент трения µ становится больше, компонент 6 управления движущей силой увеличивает максимальную движущую силу. В результате сила ползучести генерируется во время уменьшения тормозной силы, и чем больше коэффициент трения μ, тем больше сила ползучести, тем самым дополнительно улучшая характеристики ускорения.
[0082]
Кроме того, если коэффициент трения μ мал, максимальная движущая сила также мала, и, следовательно, вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, может быть уменьшена. Кроме того, можно предотвратить инцидент, когда собственное транспортное средство трогается, словно делая рывок вперед.
[0083]
(Модификация B2)
В модификации B2 сенсорное устройство 3 в качестве внешней силы, препятствующей троганию собственного транспортного средства, обнаруживает вес W (или количество людей N или нагрузку T) собственного транспортного средства.
[0084]
И, когда вес W (или количество людей N или нагрузка T) увеличивается, компонент 6 управления движущей силой увеличивает максимальную движущую силу. В результате сила ползучести генерируется во время уменьшения тормозной силы, и чем больше вес W (или количество людей N или нагрузка T), тем больше сила ползучести, тем самым дополнительно улучшая характеристики ускорения.
[0085]
Если вес W (или количество людей N или нагрузка T) мал, максимальная движущая сила также мала, и, следовательно, вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, может быть уменьшена.
[0086]
(Модификация B3)
В модификации B3 сенсорное устройство 3 измеряет, для простоты трогания собственного транспортного средства, давление p в шинах собственного транспортного средства.
[0087]
И, когда давление p становится больше, компонент 6 управления движущей силой уменьшает максимальную движущую силу. В результате, даже если сила ползучести генерируется во время уменьшения тормозной силы, чем больше давление p, тем меньше сила ползучести, чтобы уменьшить вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания. Кроме того, можно предотвратить инцидент, когда собственное транспортное средство трогается, словно делая рывок вперед.
[0088]
Кроме того, если давление p мало, максимальная движущая сила велика, чтобы дополнительно улучшить характеристики ускорения.
[0089]
(Модификация B4)
В модификации B4 сенсорное устройство 3 в качестве внешней силы, препятствующей троганию собственного транспортного средства, измеряет градиент U наклона вверх. Градиент U наклона вверх измеряется с использованием датчика ускорения.
[0090]
И, по мере того как градиент U наклона вверх становится больше, компонент 6 управления движущей силой увеличивает максимальную движущую силу. В результате сила ползучести генерируется во время уменьшения тормозной силы, и чем больше градиент U наклона вверх, тем больше сила ползучести, чтобы дополнительно улучшить характеристики ускорения.
[0091]
Кроме того, если градиент U наклона вверх мал, максимальная движущая сила также мала, и, следовательно, вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, может быть уменьшена. Кроме того, можно предотвратить инцидент, когда собственное транспортное средство трогается, словно делая рывок вперед.
[0092]
(Модификация B5)
В модификации B5 сенсорное устройство 3 в качестве внешней силы, препятствующей троганию собственного транспортного средства, измеряет скорость ветра aw, который собственное транспортное средство принимает спереди.
[0093]
И когда скорость ветра aw становится больше, компонент 6 управления движущей силой увеличивает максимальную движущую силу. В результате сила ползучести генерируется во время уменьшения тормозной силы, и чем больше скорость ветра aw, тем больше сила ползучести, чтобы дополнительно улучшить характеристики ускорения.
[0094]
Кроме того, если скорость ветра aw мала, максимальная движущая сила также мала, и, следовательно, вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, может быть уменьшена. Кроме того, можно предотвратить инцидент, когда собственное транспортное средство трогается, словно делая рывок вперед.
[0095]
(Модификация B6)
В модификации B6 сенсорное устройство 3 измеряет в качестве внешней силы, ускоряющей трогание собственного транспортного средства, градиент D наклона вниз поверхности дороги. Градиент D наклона вниз можно измерить с помощью датчика ускорения.
[0096]
И, по мере того как градиент D наклона вниз становится больше, компонент 6 управления движущей силой делает максимальную движущую силу меньше. В результате, даже если сила ползучести генерируется во время уменьшения тормозной силы, чем больше градиент D наклона вниз, тем меньше сила ползучести, чтобы снизить вероятность того, что люди в транспортном средстве испытают толчок во время трогания. Кроме того, можно предотвратить инцидент, когда собственное транспортное средство трогается, словно делая рывок вперед.
[0097]
Кроме того, если градиент D наклона вниз мал, максимальная движущая сила велика, чтобы дополнительно улучшить характеристики ускорения.
[0098]
(Модификация B7)
В модификации B7 сенсорное устройство 3 измеряет в качестве внешней силы, ускоряющей трогание собственного транспортного средства, скорость ветра fw, который собственное транспортное средство принимает сзади.
[0099]
И, когда скорость ветра fw становится больше, компонент 6 управления движущей силой уменьшает максимальную движущую силу. В результате, даже если сила ползучести генерируется во время уменьшения тормозной силы, чем больше скорость ветра fw, тем меньше сила ползучести, чтобы снизить вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания. Кроме того, можно предотвратить инцидент, когда собственное транспортное средство трогается, словно делая рывок вперед.
[0100]
Кроме того, если скорость ветра fw мала, максимальная движущая сила велика для дополнительного улучшения характеристик ускорения.
[0101]
(Модификация С1)
В модификации C1 сенсорное устройство 3 измеряет в качестве внешней силы, препятствующей троганию собственного транспортного средства, коэффициент трения µ поверхности дороги в положении собственного транспортного средства.
[0102]
И чем больше коэффициент трения μ, тем быстрее компонент 5 управления тормозной силой уменьшает тормозную силу тормозного устройства 2 после момента времени t1 на фиг. 2 (то же самое для модификации C2 и после нее). Например, градиент уменьшения тормозной силы (уменьшение в единицу времени, в дальнейшем то же самое) увеличивается, чтобы быстро уменьшить тормозную силу тормозного устройства 2. В результате, даже если сила трения велика, могут быть реализованы высокие характеристики ускорения.
[0103]
Кроме того, если коэффициент трения µ мал, тормозная сила сохраняется долго, и, следовательно, вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, может быть уменьшена. Кроме того, можно предотвратить инцидент, когда собственное транспортное средство трогается, словно делая рывок вперед.
Кроме того, увеличение порогового значения тормозной силы при увеличении коэффициента трения µ может обеспечить тот же эффект.
[0104]
(Модификация С2)
В модификации C2 сенсорное устройство 3 в качестве внешней силы, предотвращающей трогание собственного транспортного средства, обнаруживает вес W (или количество людей N или нагрузку T) собственного транспортного средства.
[0105]
И чем больше вес W (или количество людей N или нагрузка T), тем быстрее компонент 5 управления тормозной силой уменьшает тормозную силу тормозного устройства 2. Например, градиент уменьшения тормозной силы увеличивается, чтобы быстро уменьшить тормозную силу тормозного устройства 2. В результате, даже если вес W (или количество людей N или нагрузка T) велик, достигаются высокие характеристики ускорения.
[0106]
Кроме того, если вес W (или количество людей N или нагрузка T) мал, тормозная сила сохраняется долго, и, следовательно, вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, может быть уменьшена.
Кроме того, увеличение порогового значения тормозной силы при увеличении веса W (или количества людей N или нагрузки T) будет обеспечивать аналогичный эффект.
[0107]
(Модификация С3)
В модификации C3 сенсорное устройство 3 измеряет, для простоты трогания собственного транспортного средства, давление p в шинах собственного транспортного средства.
[0108]
И чем ниже давление p, тем быстрее компонент 5 управления тормозной силой уменьшает тормозную силу тормозного устройства 2. Например, градиент уменьшения тормозной силы увеличивается, чтобы быстро уменьшить тормозную силу тормозного устройства 2. В результате, даже когда давление p низкое, чтобы помешать троганию транспортного средства, высокая характеристика ускорения становится достижимой.
[0109]
Кроме того, когда давление p высокое, чтобы сделать трогание транспортного средства проще, тормозная сила сохраняется долго, чтобы уменьшить вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания. Кроме того, можно предотвратить инцидент, что собственное транспортное средство трогается, словно делая рывок вперед.
Кроме того, увеличение порогового значения тормозной силы по мере снижения давления p обеспечит аналогичный эффект.
[0110]
(Модификация C4)
В модификации C4, сенсорное устройство 3 измеряет в качестве внешней силы, препятствующей троганию собственного транспортного средства, градиент U наклона вверх. Градиент U наклона вверх можно измерить с помощью датчика ускорения.
[0111]
И, чем больше градиент U наклона вверх, тем медленнее компонент 5 управления тормозной силой уменьшает тормозную силу тормозного устройства 2. Например, градиент уменьшения тормозной силы делается меньше, чтобы медленнее уменьшить тормозную силу тормозного устройства 2. Например, когда градиент U наклона вверх большой на подъеме, быстрое уменьшение тормозной силы приводит к увеличению вероятности того, что собственное транспортное средство будет двигаться назад по наклону вверх. Однако, медленное уменьшение тормозной силы способно предотвратить такие неудобства.
[0112]
Кроме того, когда градиент U наклона вверх мал, тормозная сила уменьшается быстрее, и, следовательно, высокая характеристика ускорения достижима.
Кроме того, снижение порогового значения тормозной силы по мере увеличения градиента U наклона вверх обеспечит аналогичный эффект.
[0113]
(Модификация C5)
В модификации C5, сенсорное устройство 3 измеряет в качестве внешней силы, препятствующей троганию собственного транспортного средства, скорость ветра aw, который собственное транспортное средство принимает спереди.
[0114]
И, чем больше скорость ветра aw, тем медленнее компонент 5 управления тормозной силой уменьшает тормозную силу тормозного устройства 2. Например, градиент уменьшения тормозной силы делается меньше, чтобы медленнее уменьшить тормозную силу тормозного устройства 2. Например, когда скорость ветра aw большая, быстрое уменьшение тормозной силы приводит к увеличению вероятности движения собственного транспортного средства назад из-за ветра. Однако медленное снижение тормозной силы может предотвратить такие неудобства.
[0115]
Кроме того, когда скорость ветра мала, тормозная сила быстро уменьшается, и, следовательно, высокая характеристика ускорения становится достижимой.
Кроме того, снижение порогового значения тормозной силы по мере увеличения скорости ветра aw обеспечит аналогичный эффект.
[0116]
(Модификация C6)
В модификации C6, сенсорное устройство 3 измеряет в качестве внешней силы, ускоряющей трогание собственного транспортного средства, градиент D наклона вниз поверхности дороги. Градиент D наклона вниз может измеряться с помощью датчика ускорения.
[0117]
И, чем меньше градиент D наклона вниз, тем быстрее компонент 5 управления тормозной силой уменьшает тормозную силу тормозного устройства 2. Например, градиент уменьшения тормозной силы увеличивается, чтобы быстро уменьшить тормозную силу тормозного устройства 2. В результате, даже когда градиент D наклона вниз мал, так что сила ускорения за счет силы гравитации мала, высокая характеристика ускорения достижима.
[0118]
Кроме того, когда градиент D наклона вниз большой, тормозная сила сохраняется долго, и, следовательно, вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания, может быть уменьшена. Кроме того, можно предотвратить инцидент, когда собственное транспортное средство трогается, словно делая рывок вперед.
Кроме того, увеличение порогового значения тормозной силы по мере того, как градиент D наклона вниз становится меньше, обеспечит аналогичный эффект.
[0119]
(Модификация C7)
В модификации C7, сенсорное устройство 3 измеряет в качестве внешней сила, ускоряющей трогание собственного транспортного средства, скорость ветра fw, который собственное транспортное средство принимает сзади.
[0120]
И, чем меньше скорость ветра fw, тем быстрее компонент 5 управления тормозной силы уменьшает тормозную силу тормозного устройства 2. Например, градиент уменьшения тормозной силы увеличивается, чтобы быстро уменьшить тормозную силу тормозного устройства 2. В результате, даже когда скорость ветра fw мала, так что сила ускорения за счет ветра мала, достигается высокая эффективность ускорения.
[0121]
Кроме того, когда скорость ветра fw велика, тормозная сила сохраняется долго, чтобы уменьшить вероятность того, что люди в транспортном средстве почувствуют толчок во время трогания. Кроме того, можно предотвратить инцидент, когда собственное транспортное средство трогается, словно делая рывок вперед.
Кроме того, увеличение порогового значения тормозной силы при уменьшении скорости ветра fw обеспечит аналогичный эффект.
[0122]
Кстати, варианты осуществления устанавливают оборудование управления транспортным средством на собственном транспортном средстве. Однако оборудование управления транспортным средством может быть установлено в серверном устройстве, способном осуществлять связь с собственным транспортным средством или во втором транспортном средстве, отличном от собственного транспортного средства, так что необходимая информация и инструкции передаются/принимаются между собственным транспортным средством и серверным устройством или вторым транспортным средством, тем самым дистанционно достигая аналогичного способа управления транспортным средством. Связь между собственным транспортным средством и серверным устройством достигается посредством беспроводной связи или связи между дорожной инфраструктурой и транспортными средствами (road-to-vehicle communication). Связь между собственным транспортным средством и вторым транспортным средством достигается с помощью так называемой связи между транспортными средствами (vehicle-to-vehicle communication).
[0123]
Выше были упомянуты варианты осуществления настоящего изобретения. Не следует понимать, что описания и чертежи, которые составляют часть этого раскрытия, ограничивают настоящее изобретение. Это раскрытие прояснит для специалистов в данной области техники различные модификации, альтернативные варианты осуществления и практические методы.
[0124]
Функции, упомянутые в вышеупомянутых вариантах осуществления, достижимы с помощью одной или множества схем обработки. Схемы обработки включают в себя запрограммированные устройства обработки, в том числе электрические схемы и блоки обработки. Кроме того, схемы обработки включают в себя специализированные интегральные схемы (ASIC), предназначенные для выполнения функций, упомянутых в вариантах осуществления, устройства, такие как обычные компоненты схемы, и тому подобное.
Описание ссылочных позиций
[0125]
1: Источник привода (Электромотор)
2: Тормозное устройство
3: Сенсорное устройство
4: Компонент управления открытием акселератора
5: Компонент управления тормозной силой (устройство удержания тормоза)
6: Компонент управления движущей силой
100: Микрокомпьютер (устройство управления транспортным средством)
μ: Коэффициент трения поверхности дороги в положении собственного транспортного средства
W: вес собственного транспортного средства
N: количество человек в собственном транспортном средстве
T: нагрузка собственного транспортного средства
p: давление в шинах собственного автомобиля
U: градиент наклона вверх
D: градиент наклона вниз
АУ: Скорость ветра спереди
ФВ: Скорость ветра сзади
Изобретение относится к транспортным средствам. В способе управления троганием транспортного средства во время трогания, если транспортное средство остановлено без операции торможения, ограничивают движущую силу, которая должна генерироваться перед фактическим троганием, до или ниже предварительной максимальной движущей силы. Движущая сила, генерируемая при трогании, представляет собой силу ползучести, генерируемую, даже когда каждое из основной движущей силы, генерируемой вследствие открытия акселератора, и открытия акселератора, равно нулю. Когда транспортное средство трогается из состояния, в котором работает устройство удержания тормоза, ограничивают силу ползучести до или ниже максимальной движущей силы до тех пор, пока тормозная сила не уменьшится до или ниже определенного значения, но не ограничивают основную силу. Когда транспортное средство трогается из состояния, когда тормозное устройство работает на основе операции торможения, выполняемой водителем, увеличивают силу ползучести выше максимальной движущей силы. Улучшаются характеристики ускорения при трогании. 2 н. и 13 з.п. ф-лы, 2 ил.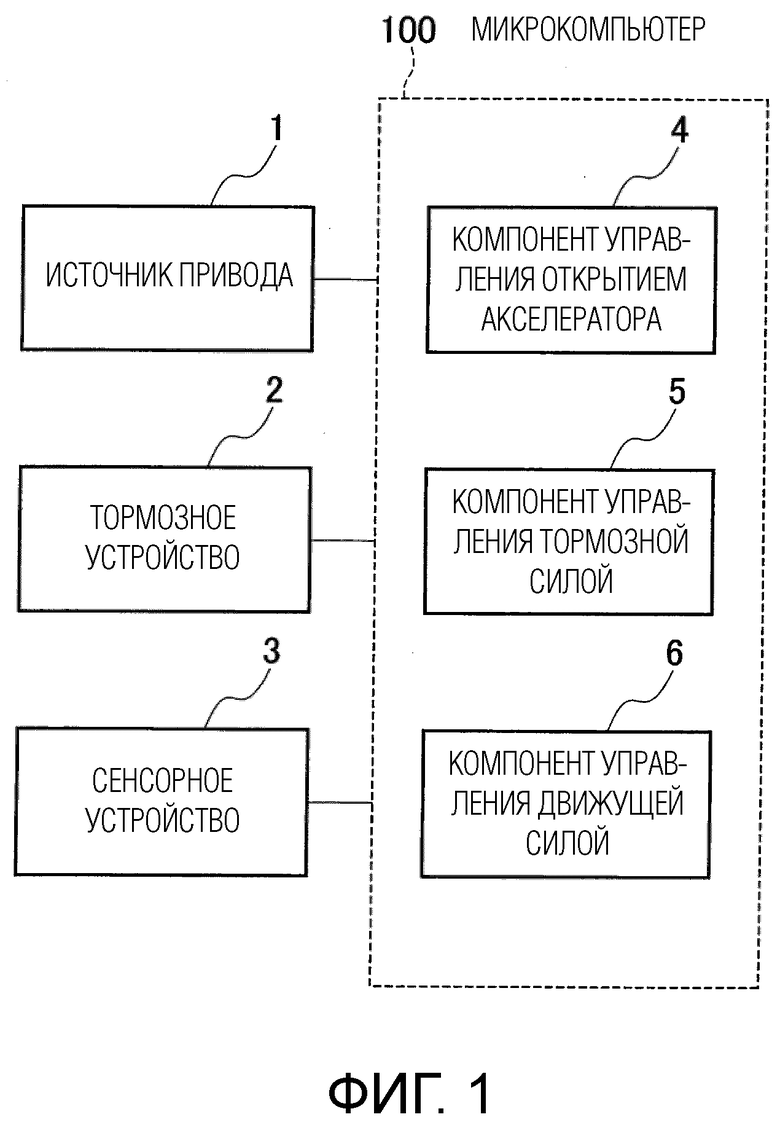
1. Способ управления троганием транспортного средства для управления транспортным средством, причем транспортное средство включает в себя тормозное устройство, которое работает на основе операции, выполняемой водителем, и устройство удержания тормоза, которое поддерживает работу тормозного устройства, даже если водитель останавливает операцию торможения, и прекращает работу тормозного устройства, когда водитель выполняет операцию трогания, причем способ характеризуется этапами, на которых:
во время трогания транспортного средства, если транспортное средство остановлено даже без операции торможения транспортного средства, ограничивают движущую силу, которая должна генерироваться перед фактическим троганием транспортного средства, до или ниже предварительно определенной максимальной движущей силы;
движущая сила, генерируемая при трогании транспортного средства, представляет собой силу ползучести, генерируемую, даже когда каждое из основной движущей силы, генерируемой вследствие открытия акселератора, и открытия акселератора равно нулю;
когда транспортное средство трогается из состояния, в котором работает устройство удержания тормоза, ограничивают силу ползучести до или ниже максимальной движущей силы до тех пор, пока тормозная сила тормозного устройства не уменьшится до или ниже предварительно определенного порогового значения тормозной силы, но не ограничивают основную силу; и
когда транспортное средство трогается из состояния, когда тормозное устройство работает на основе операции торможения, выполняемой водителем, увеличивают силу ползучести выше максимальной движущей силы.
2. Способ управления троганием транспортного средства по п.1, отличающийся тем, что:
после окончания ограничения движущей силы увеличивают движущую силу с течением времени.
3. Способ управления троганием транспортного средства по п.2, отличающийся тем, что:
обнаруживают фактор, влияющий на трогание транспортного средства; и
в соответствии с упомянутым фактором управляют увеличением движущей силы в единицу времени.
4. Способ управления троганием транспортного средства по п.3, отличающийся тем, что:
измеряют в качестве упомянутого фактора внешнюю силу, препятствующую троганию транспортного средства; и
усиливают увеличение движущей силы в единицу времени, по мере того как внешняя сила, препятствующая троганию транспортного средства, становится больше.
5. Способ управления троганием транспортного средства по п.3 или 4, отличающийся тем, что:
измеряют в качестве упомянутого фактора внешнюю силу, ускоряющую трогание транспортного средства; и
уменьшают увеличение движущей силы в единицу времени, по мере того как внешняя сила, ускоряющая трогание транспортного средства, становится больше.
6. Способ управления троганием транспортного средства по любому из пп.1-5, отличающийся тем, что:
обнаруживают фактор, влияющий на трогание транспортного средства; и
в соответствии с упомянутым фактором устанавливают максимальную движущую силу.
7. Способ управления троганием транспортного средства по п.6, отличающийся тем, что:
измеряют в качестве упомянутого фактора внешнюю силу, препятствующую троганию транспортного средства; и
увеличивают максимальную движущую силу, по мере того как внешняя сила, препятствующая троганию транспортного средства, становится больше.
8. Способ управления троганием транспортного средства по п.6 или 7, отличающийся тем, что:
измеряют в качестве упомянутого фактора внешнюю силу, ускоряющую трогание транспортного средства; и
уменьшают максимальную движущую силу, по мере того как внешняя сила, ускоряющая трогание транспортного средства, становится больше.
9. Способ управления троганием транспортного средства по любому из пп.1-8, отличающийся тем, что:
обнаруживают фактор, влияющий на трогание транспортного средства; и
в соответствии с упомянутым фактором управляют тормозной силой тормозного устройства транспортного средства.
10. Способ управления троганием транспортного средства по п.9, отличающийся тем, что:
измеряют в качестве упомянутого фактора внешнюю силу, ускоряющую трогание транспортного средства; и
уменьшают тормозную силу быстрее по мере того как внешняя сила, ускоряющая трогание транспортного средства, становится меньше.
11. Способ управления троганием транспортного средства по любому из пп.3-10, отличающийся тем, что:
измеряют в качестве упомянутого фактора одно или более из коэффициента трения поверхности дороги в положении транспортного средства, веса транспортного средства, количества людей в транспортном средстве, нагрузки транспортного средства, давления в шинах транспортного средства, наклона поверхности дороги и скорости ветра, принимаемого транспортным средством.
12. Способ управления троганием транспортного средства по п.9, отличающийся тем, что:
измеряют в качестве упомянутого фактора коэффициент трения поверхности дороги в положении транспортного средства, вес транспортного средства или количество людей в транспортном средстве; и
уменьшают тормозную силу быстрее, по мере того как коэффициент трения, вес или число людей в транспортном средстве становится больше.
13. Способ управления троганием транспортного средства по п.9, отличающийся тем, что:
измеряют в качестве упомянутого фактора градиент наклона вверх поверхности дороги в положении транспортного средства или скорость ветра, который транспортное средство принимает спереди; и
уменьшают тормозную силу медленнее, по мере того как градиент наклона вверх или скорость ветра становится больше.
14. Способ управления троганием транспортного средства по любому из пп.1-13, отличающийся тем, что источником привода транспортного средства является электромотор.
15. Устройство управления троганием транспортного средства для управления транспортным средством, которое включает в себя тормозное устройство, управляемое на основании источника привода и операции торможения водителя, содержащее:
контроллер движущей силы, управляющий движущей силой, генерируемой источником привода, и контроллер тормозной силы, генерирующий управляющий сигнал контроллера движущей силы; и
устройство удержания тормоза, включенное в контроллер тормозной силы и поддерживающее работу тормозного устройства, даже если водитель останавливает операцию торможения, и прекращающее работу тормозного устройства, когда водитель выполняет операцию трогания, причем
контроллер тормозной силы выполнен с возможностью:
во время трогания транспортного средства и если транспортное средство остановлено даже без операции торможения транспортного средства, ограничивать силу ползучести, генерируемую перед фактическим троганием транспортного средства, до или ниже предварительно определенной максимальной движущей силы до тех пор, пока тормозная сила тормозного устройства не уменьшится до или ниже предварительно определенного порогового значения тормозной силы;
когда транспортное средство трогается из состояния, в котором работает устройство удержания тормоза, ограничивать силу ползучести до или ниже максимальной движущей силы до тех пор, пока тормозная сила тормозного устройства не уменьшится до или ниже предварительно определенного порогового значения тормозной силы, но не ограничивать основную силу, генерируемую вследствие открытия акселератора; и
когда транспортное средство трогается из состояния, когда тормозное устройство работает на основе операции торможения, выполняемой водителем, увеличивать движущую силу выше максимальной движущей силы.
| JP 2009214580 A, 24.09.2009 | |||
| Способ определения активности и стойкости ванн сульфидирования | 1958 |
|
SU116448A1 |
| JP 2012016987 A, 26.01.2012 | |||
| JP 2008201182 A, 04.09.2008 | |||
| US 2002029943 A1, 14.03.2002. | |||

