Область техники
Настоящее изобретение относится к способу и устройству управления блокировкой транспортного средства, в которых когда блокирующая муфта в расцепленном состоянии переводится в зацепленное состояние во время трогания с места или движения, блокирующая муфта переключается в зацепленное состояние через управление проскальзыванием.
Уровень техники
Традиционно, известно устройство управления силой зацепления для блокирующей муфты, в котором предоставляется преобразователь крутящего момента, расположенный между двигателем и трансмиссией и имеющий блокирующую муфту, и выполняется управление блокировкой при начальном движении, при котором блокирующая муфта управляется на основе проскальзывания во время трогания с места. При этом управлении блокировкой при начальном движении, перегрузочная способность блокирующей муфты постепенно увеличивается, и частота вращения при проскальзывании уменьшается, чтобы за счет этого переключать блокирующую муфту из расцепленного состояния в зацепленное состояние (см., например, публикацию выложенной заявки на патент Японии № 2004-138147).
Задача, решаемая изобретением
Тем не менее, в традиционном устройстве, когда операция увеличения степени нажатия педали акселератора выполняется непосредственно перед тем, как блокирующая муфта зацепляется во время управления проскальзыванием при управлении блокировкой при начальном движении, имеется риск того, что возникает следующая проблема.
То есть, вследствие увеличения крутящего момента двигателя, сопровождающего операцию увеличения степени нажатия педали акселератора, в некоторых случаях, крутящий момент двигателя превышает перегрузочную способность блокирующей муфты. Как результат, даже если оно возникает непосредственно перед тем, как блокирующая муфта зацепляется, возникает так называемое расслоение вращения, при котором частота вращения при проскальзывании переходит с уменьшения на увеличение. Толчок при зацеплении и толчкообразная вибрация (самовозбуждающаяся вибрация) возникают вследствие этого расслоения вращения.
С учетом вышеописанных проблем, цель настоящего изобретения заключается в том, чтобы создать способ управления и устройство управления блокировкой транспортного средства, которые предотвращают возникновение толчка при зацеплении и толчкообразной вибрации во время управления проскальзыванием при управлении блокировкой, даже если операция увеличения степени нажатия педали акселератора выполняется непосредственно перед тем, как блокирующая муфта зацепляется.
Средство достижения цели
Чтобы достигать цели, описанной выше, настоящее изобретение содержит преобразователь крутящего момента, который имеет блокирующую муфту и который располагается между двигателем и трансмиссией.
В этом транспортном средстве, когда запрос на зацепление блокирующей муфты выдается, выполняется управление блокировкой, за счет чего зацепление достигается через управление проскальзыванием, которое увеличивает перегрузочную способность блокирующей муфты и постепенно уменьшает частоту вращения при проскальзывании, которая представляет собой частоту дифференциального вращения входного/выходного вала блокирующей муфты.
Во время управления проскальзыванием при управлении блокировкой, если частота вращения при проскальзывании достигает или опускается ниже заданного значения или меньше, выполняется управление уменьшением крутящего момента двигателя, за счет чего крутящий момент двигателя уменьшается таким образом, что он ниже нормального крутящего момента, который прикладывается в ответ на запрос водителя.
Преимущества изобретения
Следовательно, если частота вращения при проскальзывании достигает или опускается ниже заданного значения во время управления проскальзыванием при управлении блокировкой, выполняется управление уменьшением крутящего момента двигателя, за счет чего крутящий момент двигателя уменьшается таким образом, что он ниже нормального крутящего момента, который прикладывается в ответ на запрос водителя.
Таким образом, частота вращения при проскальзывании блокирующей муфты уменьшается, и частота вращения при проскальзывании достигает или опускается ниже заданного значения непосредственно перед тем, как блокирующая муфта зацепляется. Соответственно, увеличение крутящего момента двигателя подавляется посредством выполнения управления уменьшением крутящего момента двигателя, даже если операция увеличения степени нажатия педали акселератора выполняется в области непосредственно перед тем, как блокирующая муфта зацепляется. Следовательно, крутящий момент двигателя не превышает перегрузочную способность блокирующей муфты, и так называемое расслоение вращения, при котором частота вращения при проскальзывании переключается с уменьшения на увеличение, предотвращается.
Как результат, можно предотвращать возникновение толчка при зацеплении и толчкообразной вибрации во время управления проскальзыванием при управлении блокировкой, даже если операция увеличения степени нажатия педали акселератора выполняется непосредственно перед тем, как блокирующая муфта зацепляется.
Краткое описание чертежей
Фиг. 1 является общим системным видом, иллюстрирующим оснащенное двигателем транспортное средство, к которому применяются способ управления и устройство управления блокировкой согласно первому варианту осуществления.
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса управления блокировкой при начальном движении блокирующей муфты, который выполняется в модуле CVT-управления первого варианта осуществления.
Фиг. 3 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса совместного управления блокирующей муфтой и двигателем, который выполняется в модуле CVT-управления первого варианта осуществления.
Фиг. 4 является схемой карты крутящего момента двигателя, иллюстрирующей пример карты крутящего момента двигателя в нормальном состоянии, карты 1 уменьшения крутящего момента и карты 2 уменьшения крутящего момента относительно величины открытия позиции педали акселератора, используемой при вычислении значения уменьшения крутящего момента для процесса совместного управления по фиг. 3.
Фиг. 5 является схемой карты линейно-изменяющегося наклона, иллюстрирующей пример карты линейно-изменяющегося наклона относительно величины открытия позиции педали акселератора, используемой при вычислении линейно-изменяющегося наклона во время управления прекращением уменьшения крутящего момента в процессе совместного управления по фиг. 3.
Фиг. 6 является временной диаграммой, иллюстрирующей соответствующие характеристики величины APO открытия позиции педали акселератора/фактической частоты Ne вращения двигателя/частоты Nt вращения турбины/крутящего момента Te двигателя/значения команды управления блокировкой (значения LU-команды), когда операция увеличения степени нажатия педали акселератора выполняется с временным интервалом непосредственно перед зацеплением муфты, во время управления проскальзыванием при управлении блокировкой при начальном движении сравнительного примера.
Фиг. 7 является временной диаграммой, иллюстрирующей соответствующие характеристики величины APO открытия позиции педали акселератора/фактической частоты Ne вращения двигателя/частоты Nt вращения турбины/крутящего момента Te двигателя/значения команды управления блокировкой (значения LU-команды), когда операция увеличения степени нажатия педали акселератора выполняется с временным интервалом непосредственно перед зацеплением муфты, во время управления проскальзыванием при управлении блокировкой при начальном движении первого варианта осуществления.
Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса совместного управления блокирующей муфтой и двигателем, который выполняется в модуле CVT-управления второго варианта осуществления.
Фиг. 9 является временной диаграммой, иллюстрирующей соответствующие характеристики величины APO открытия позиции педали акселератора/фактической частоты Ne вращения двигателя/частоты Nt вращения турбины/крутящего момента Te двигателя/значения команды управления блокировкой (значения LU-команды), когда операция увеличения степени нажатия педали акселератора выполняется с временным интервалом непосредственно перед зацеплением муфты, во время управления проскальзыванием при управлении блокировкой при начальном движении второго варианта осуществления.
Подробное описание вариантов осуществления изобретения
Далее описывается предпочтительный вариант осуществления для реализации способа управления и устройства управления блокировкой транспортного средства настоящего изобретения на основе первого варианта осуществления и второго варианта осуществления, проиллюстрированных на чертежах.
Первый вариант осуществления
Сначала описывается конфигурация.
Способ управления и устройство управления блокировкой в первом варианте осуществления применяются к оснащенному двигателем транспортному средству, оснащенному преобразователем крутящего момента и бесступенчатой трансмиссией (CVT). Ниже отдельно описываются "общая конфигурация системы", "конфигурация процесса управления блокировкой при начальном движении" и "конфигурация процесса совместного управления" относительно конфигурации способа управления и устройства управления блокировкой оснащенного двигателем транспортного средства, как описано в первом варианте осуществления.
Общая конфигурация системы
Фиг. 1 иллюстрирует оснащенное двигателем транспортное средство, к которому применяются способ управления и устройство управления блокировкой первого варианта осуществления. Ниже описывается общая конфигурация системы на основе фиг. 1.
Приводная система транспортного средства содержит двигатель 1, выходной вал 2 двигателя, блокирующую муфту 3, преобразователь 4 крутящего момента, входной трансмиссионный вал 5, бесступенчатую трансмиссию 6 (трансмиссию), ведущий вал 7 и ведущие колеса 8, как проиллюстрировано на фиг. 1.
Блокирующая муфта 3 встроена в преобразователь 4 крутящего момента, соединяет двигатель 1 и бесступенчатую трансмиссию 6 через преобразователь 4 крутящего момента посредством расцепления муфты и непосредственно соединяет выходной вал 2 двигателя и входной трансмиссионный вал 5 посредством зацепления муфты. Зацепление/зацепление в режиме проскальзывания/расцепление этой блокирующей муфты 3 управляется посредством фактического давления масла в режиме блокировки, которое регулируется на основе давления в магистрали, которое представляет собой исходное давление, когда задаваемое давление в режиме блокировки выводится из модуля 12 CVT-управления, который описывается ниже. Давление в магистрали формируется посредством регулирования, с использованием соленоидного клапана регулирования давления в магистрали, давления масла на выпуске масляного насоса, который не показан, который вращательно приводится в действие посредством двигателя 1.
Преобразователь 4 крутящего момента содержит рабочее колесо 41 насоса, рабочее колесо 42 турбины, которое располагается напротив рабочего колеса 41 насоса, и статор 43, который располагается между рабочим колесом 41 насоса и рабочим колесом 42 турбины. Этот преобразователь 4 крутящего момента представляет собой гидромуфту, которая передает крутящий момент посредством циркуляции гидравлического масла, заполненного в ней, в каждую лопасть рабочего колеса 41 насоса, рабочего колеса 42 турбины и статора 43. Рабочее колесо 41 насоса соединяется с выходным валом 2 двигателя через крышку 44 преобразователя, внутренняя поверхность которой представляет собой зацепляющую поверхность блокирующей муфты 3. Рабочее колесо 42 турбины соединяется с входным трансмиссионным валом 5. Статор 43 предоставляется на стационарном элементе (картере трансмиссии и т.д.) через одностороннюю муфту 45.
Бесступенчатая трансмиссия 6 представляет собой ременную бесступенчатую трансмиссию, которая непрерывно управляет передаточным отношением посредством назначения диаметра точки контакта ремня первичному шкиву и вторичному шкиву, и вращение выходного вала после переключения передач передается на ведущие колеса 8 через ведущий вал 7.
Система управления транспортного средства содержит модуль 11 управления двигателем (ECU), модуль 12 CVT-управления (CVTCU) и линию 13 CAN-связи, как проиллюстрировано на фиг. 1. Датчик 14 частоты вращения двигателя, датчик 15 частоты вращения турбины (= датчик частоты вращения входного вала CVT) и датчик 16 частоты вращения выходного вала CVT (= датчик скорости транспортного средства) предусмотрены в качестве датчиков для получения входной информации. Дополнительно предусмотрены датчик 17 величины открытия позиции педали акселератора, датчик 18 частоты вращения вторичного шкива, датчик 19 частоты вращения первичного шкива, датчик 20 фактического давления масла в режиме блокировки, тормозной переключатель 21 и т.п.
Модуль 11 управления двигателем уменьшает объем впрыска топлива в двигатель 1 таким образом, чтобы получать значение уменьшения крутящего момента, которое основано на величине APO открытия позиции педали акселератора, при приеме сигнала уменьшения крутящего момента, запрашивающего начало управления уменьшением крутящего момента двигателя, из модуля 12 CVT-управления через линию 13 CAN-связи. После этого, когда сигнал уменьшения крутящего момента, принимаемый из модуля 12 CVT-управления через линию 13 CAN-связи, прекращается во время выполнения управления уменьшением крутящего момента двигателя, управление впрыском топлива для получения нормального крутящего момента, соответствующего запросу водителя, восстанавливается. Нормальный крутящий момент, соответствующий запросу водителя, означает крутящий момент двигателя для получения запрашиваемой водителями движущей силы, вычисленной из величины APO открытия позиции педали акселератора (см. карту крутящего момента двигателя в нормальном состоянии по фиг. 4).
Модуль 12 CVT-управления выполняет управление трансмиссией для управления передаточным отношением бесступенчатой трансмиссии 6, управление давлением в магистрали, управление блокировкой для управления зацеплением/зацеплением в режиме проскальзывания/расцеплением блокирующей муфты 3 и т.п. Из этого управления блокировкой, во время трогания с места, инициируемого посредством нажатия акселератора, запрос на зацепление блокирующей муфты выводится в блокирующую муфту 3, чтобы выполнять управление блокировкой при начальном движении, чтобы переходить в полностью зацепленное состояние через управление проскальзыванием, в целях повышения эффективности использования топлива. При этом управлении блокировкой при начальном движении, непосредственно давление в магистрали не стабилизируется, тогда как давление в магистрали, которое представляет собой исходное давление для фактического давления масла в режиме блокировки, повышается; в силу этого значение команды управления блокировкой задерживается (значение команды управления поддерживается) при условии, что давление в магистрали повышается. Затем после того, как время задержки истекло, значение команды управления блокировкой повышается, и управление проскальзыванием выполняется для того, чтобы постепенно уменьшать частоту вращения при проскальзывании. Помимо этого, совместное управление блокирующей муфтой 3 и двигателем 1 выполняется для того, чтобы выполнять управление уменьшением крутящего момента двигателя, чтобы уменьшать крутящий момент двигателя 1 таким образом, что он ниже нормального крутящего момента, который прикладывается в ответ на запрос водителя, во время управления блокировкой при начальном движении.
Конфигурация процесса управления блокировкой при начальном движении
Фиг. 2 иллюстрирует последовательность операций процесса управления блокировкой при начальном движении блокирующей муфты 3, который выполняется в модуле 12 CVT-управления первого варианта осуществления (модулем управления блокирующей муфтой). Ниже описывается каждый этап на фиг. 2, показывающем конфигурацию процесса при управлении блокировкой при начальном движении блокирующей муфты 3, которое начинается в остановленном состоянии с включенным тормозом/выключенным акселератором.
Описание "LU" является сокращением для "блокировки".
На этапе S1, определяется то, переключен или нет сигнал переключения из тормозного переключателя 21 из включенного в выключенное состояние посредством операции снятия ноги с педали тормоза. Если "Да" ("тормоз включен --> выключен"), процесс переходит к этапу S2, а если "Нет" (не "тормоз включен --> выключен"), процесс переходит к концу.
На этапе S2, после определения "тормоз включен --> выключен" на этапе S1, или определения того, что не "акселератор выключен --> включен", на этапе S3, значение LU-команды задается в качестве давления состояния готовности, и процесс переходит к этапу S3.
Здесь, "давление состояния готовности" представляет собой подготовительное давление гидравлического масла для подготовки к зацеплению блокирующей муфты 3, чтобы заполнять гидравлическую схему в блокирующей муфте 3 гидравлическим маслом, и значение LU-команды, чтобы получать давление состояния готовности, задается равным постоянному значению, при котором не возникает перегрузочная способность блокирующей муфты.
На этапе S3, после "значение LU-команды=давление состояния готовности" на этапе S2, определяется то, выполнена или нет операция нажатия педали акселератора с намерением трогания с места транспортного средства. Если "Да" ("акселератор выключен --> включен"), процесс переходит к этапу S4, а если "Нет" (не "акселератор выключен --> включен"), процесс возвращается к этапу S2.
Здесь, определение того, что операция нажатия педали акселератора выполнена, определяется, например, когда величина APO открытия позиции педали акселератора из датчика 17 величины открытия позиции педали акселератора переходит от величины открытия 0/8 (состояния отпускания педали акселератора) к величине открытия, которая выше 0/8 величины открытия. Помимо этого, при использовании переключателя акселератора, определяется то, когда сигнал переключения переключен из выключенного состояния (состояния отпускания педали акселератора) во включенное состояние (состояние нажатия педали акселератора).
На этапе S4, после определения "акселератор выключен --> включен" на этапе S3, или определения того, что T≤T1, на этапе S4, определяется то, превышает или нет значение T таймера, подсчет которого начинается, когда операция нажатия педали акселератора определяется на этапе S3, время T1 задержки согласно значению LU-команды. В случае "Да" (T>T1), процесс переходит к этапу S5, а если "Нет" (T≤T1), повторяется определение этапа S4.
Здесь, "время T1 задержки согласно значению LU-команды" задается в качестве времени, требуемого для повышения и стабилизации давления в магистрали после трогания с места, на основе множества экспериментальных данных. Время T1 задержки согласно значению LU-команды может предоставляться в качестве фиксированного времени или в качестве переменного времени, которое отличается в зависимости от температуры трансмиссионного гидравлического масла, которая представляет собой влияющий фактор в гидравлической характеристике.
На этапе S5, после определения того, что T>T1, на этапе S4, или определения того, что "значение LU-команды ≤ заданное значение", на этапе S6, значение LU-команды повышается с использованием линейно-изменяющегося наклона для формирования LU-давления, и процесс переходит к этапу S6.
Таким образом, посредством повышения значения LU-команды с использованием линейно-изменяющегося наклона для формирования LU-давления, LU-давление повышается с давления состояния готовности до начального давления точки пересечения, при котором начинает выводиться перегрузочная LU-способность (= передаваемый крутящий момент муфты). Линейно-изменяющийся наклон для формирования LU-давления значения LU-команды может предоставляться с использованием ступенчатого градиента, за счет чего значение LU-команды повышается сразу.
На этапе S6, после "значение LU-команды=линейно-изменяющийся наклон для формирования LU-давления" на этапе S5, определяется то, превышает или нет значение LU-команды заданное значение для получения начального давления точки пересечения, при котором начинает выводиться перегрузочная LU-способность. В случае "Да" ("значение LU-команды > заданное значение"), процесс переходит к этапу S7, а если "Нет" ("значение LU-команды ≤ заданное значение"), процесс возвращается к этапу S5.
На этапе S7, после определения того, что "значение LU-команды > заданное значение", на этапе S6, или определения того, что "частота вращения при проскальзывании > N1", на этапе S8, выполняется управление перегрузочной способностью блокирующей муфты (FB-управление) для блокирующей муфты 3, и процесс переходит к этапу S8.
При этом управлении перегрузочной способностью блокирующей муфты, характеристика целевой частоты вращения при проскальзывании блокирующей муфты 3 задается равной характеристике, которая уменьшается с постепенным градиентом от момента, когда определяется то, что "значение LU-команды > заданное значение". Затем значение LU-команды в блокирующую муфту 3 подвергается управлению с обратной связью (FB-управлению) таким образом, что фактическая частота вращения при проскальзывании (= "частота Ne вращения двигателя - частота Nt вращения турбины") совпадает с целевой частотой вращения двигателя посредством характеристики целевой частоты вращения при проскальзывании.
На этапе S8, после управления перегрузочной LU-способностью (FB-управления) на этапе S7 или определения того, что "частота вращения при проскальзывании > N2", на этапе S10, определяется то, достигает или опускается ниже либо нет частота вращения при проскальзывании первого заданного значения N1, и процесс переходит к этапу S9.
Здесь, "первое заданное значение N1" является пороговым значением для определения того, что частота вращения при проскальзывании переходит в область управления плавным включением непосредственно перед зацеплением, и задается, например, равным значению приблизительно N1=200 об/мин. Значение этого первого заданного значения N1 также используется в качестве порогового значения начало определения диапазона определения увеличения степени нажатия педали акселератора в процессе совместного управления по фиг. 3.
На этапе S9, после определения того, что "частота вращения при проскальзывании ≤ N1", на этапе S8, выполняется линейно-изменяющееся управление (FF-управление) для повышения значения LU-команды с использованием заданного линейно-изменяющегося наклона, и процесс переходит к этапу S10.
Здесь, "заданный линейно-изменяющийся наклон" предоставляется посредством градиента увеличения значения LU-команды, который увеличивает скорость уменьшения частоты вращения при проскальзывании больше по сравнению с управлением перегрузочной LU-способностью (FB-управлением). "FF-управление (управление с прямой связью)" отличается от FB-управления, которое учитывает фактическую частоту вращения при проскальзывании и целевую частоту вращения при проскальзывании, и означает управление для вывода значения LU-команды согласно заданной характеристике линейно-изменяющегося наклона.
На этапе S10, после увеличения значения LU-команды (FF-управление) на этапе S9, определяется то, достигает или опускается ниже либо нет частота вращения при проскальзывании второго заданного значения N2. Если "Да" ("частота вращения при проскальзывании ≤ N2"), процесс переходит к этапу S11, а если "Нет" ("частота вращения при проскальзывании > N2"), процесс возвращается к этапу S8.
Здесь, "второе заданное значение N2 (= частота вращения для определения зацепления муфты)" является пороговым значением для определения того, что частота вращения при проскальзывании переходит в область, в которой муфта может считаться зацепленной, и задается, например, равным значению приблизительно N2=50 об/мин. Значение этого второго заданного значения N2 также используется в качестве порогового значения завершения определения диапазона определения увеличения степени нажатия педали акселератора в процессе совместного управления по фиг. 3.
На этапе S11, после определения того, что "частота вращения при проскальзывании ≤ N2", на этапе S10, или определения того, что "частота вращения при проскальзывании > N3", на этапе S12, выполняется управление LU-зацеплением (FF-управление), и процесс переходит к этапу S12.
Здесь, при "управлении LU-зацеплением", управление с прямой связью (FF-управление) для быстрого повышения значения LU-команды с использованием линейно-изменяющегося наклона, который превышает линейно-изменяющийся наклон на этапе S9, выполняется для того, чтобы быстро переключать блокирующую муфту 3 в зацепленное состояние.
На этапе S12, после управления LU-зацеплением (FF-управления) на этапе S11, определяется то, достигает или опускается ниже либо нет частота вращения при проскальзывании третьего заданного значения N3. Если "Да" ("частота вращения при проскальзывании ≤ N3"), процесс переходит к этапу S13, а если "Нет" ("частота вращения при проскальзывании > N3"), процесс возвращается к этапу S11.
Здесь, "третье заданное значение N3" является пороговым значением для определения того, что частота вращения при проскальзывании исчезает, и задается, например, равным значению приблизительно N3=10 об/мин.
На этапе S13, после определения того, что "частота вращения при проскальзывании ≤ N3", на этапе S12, выполняется управление (FF-управление) для того, чтобы максимизировать перегрузочную LU-способность, и процесс переходит к концу. Здесь, при "управлении, чтобы максимизировать перегрузочную LU-способность", управление с прямой связью (FF-управление) для повышения значения LU-команды до максимального значения пошагово выполняется для того, чтобы переводить блокирующую муфту 3 в полностью зацепленное состояние.
Конфигурация процесса совместного управления
Фиг. 3 иллюстрирует последовательность операций процесса совместного управления блокирующей муфтой 3 и двигателем 1, который выполняется в модуле 12 CVT-управления первого варианта осуществления (модуле совместного управления). Ниже описывается каждый этап на фиг. 3, показывающем конфигурацию процесса при совместном управлении блокирующей муфты 3 и двигателя 1 (процесс управления блокировкой при начальном движении+управление уменьшением крутящего момента двигателя), который начинается в остановленном состоянии с отключенным акселератором. Этот процесс совместного управления начинается одновременно с началом управления блокировкой при начальном движении.
На этапе S21, определяется то, выполнена или нет операция нажатия педали акселератора с намерением трогания с места транспортного средства после операции выключения тормоза для начала управления блокировкой при начальном движении. Если "Да" ("акселератор выключен --> включен"), процесс переходит к этапу S22, а если "Нет" (не "акселератор выключен --> включен"), процесс переходит к концу.
Здесь, определение того, что операция нажатия педали акселератора выполнена, выполняется посредством использования определения, идентичного определению на этапе S3 по фиг. 2.
На этапе S22, после определения "акселератор выключен --> включен" на этапе S21, или определения того, что "частота вращения при проскальзывании > N1", либо того, что "увеличение степени нажатия педали акселератора отсутствует", на этапе S23, выполняется управление уменьшением крутящего момента двигателя (первое управление уменьшением крутящего момента двигателя), и процесс переходит к этапу S23.
Здесь, управление уменьшением крутящего момента двигателя начинается посредством вывода сигнала уменьшения крутящего момента двигателя в модуль 11 управления двигателем через линию 13 CAN-связи. Значение ΔTe1 уменьшения крутящего момента (первое значение уменьшения крутящего момента) является значением, полученным посредством вычитания крутящего момента Tem1 двигателя согласно карте 1 из крутящего момента Ten1 двигателя в нормальном состоянии, когда, например, величина открытия позиции педали акселератора составляет APO1, как проиллюстрировано на фиг. 4.
На этапе S23, после выполнения первого управления уменьшением крутящего момента двигателя на этапе S22, определяется то, устанавливается или нет "частота вращения при проскальзывании ≤ N1", и то, что "увеличение степени нажатия педали акселератора присутствует". Если "Да" ("частота вращения при проскальзывании ≤ N1" и "увеличение степени нажатия педали акселератора присутствует"), процесс переходит к этапу S24, а если "Нет" ("частота вращения при проскальзывании > N1" или "увеличение степени нажатия педали акселератора отсутствует"), процесс возвращается к этапу S22.
Здесь, "первое заданное значение N1" является пороговым значением для определения того, что частота вращения при проскальзывании переходит в область управления плавным включением непосредственно перед зацеплением, и задается, например, равным значению приблизительно N1=200 об/мин, которое является значением, идентичным первому заданному значению N1, используемому на этапе S8 по фиг. 2. Определение "увеличение степени нажатия педали акселератора присутствует" выполняется посредством отслеживания величины APO открытия позиции педали акселератора и определения того, что "увеличение степени нажатия педали акселератора присутствует", когда, например, величина APO открытия позиции педали акселератора увеличивается таким образом, что она превышает значение определения увеличения степени нажатия.
На этапе S24, после определения того, что "частота вращения при проскальзывании ≤ N1", и того, что "увеличение степени нажатия педали акселератора присутствует", на этапе S23, или определения того, что "частота вращения при проскальзывании > N2", на этапе S25, выполняется управление уменьшением крутящего момента двигателя (второе управление уменьшением крутящего момента двигателя), и процесс переходит к этапу S25.
Здесь, значение ΔTe2 уменьшения крутящего момента (второе значение уменьшения крутящего момента) является значением, полученным посредством вычитания крутящего момента Tem2 двигателя согласно карте 2 из крутящего момента двигателя в нормальном состоянии Ten2, когда, например, величина открытия позиции педали акселератора составляет APO2, как проиллюстрировано на фиг. 4. Поскольку второе управление уменьшением крутящего момента двигателя выполняется после первого управления уменьшением крутящего момента двигателя согласно значению ΔTe1 уменьшения крутящего момента на этапе S22, выполняется управление для того, чтобы уменьшать сигнал уменьшения крутящего момента от крутящего момента Tem1 двигателя согласно карте 1 до крутящего момента Tem2 двигателя согласно карте 2 при величине APO1 открытия позиции педали акселератора.
На этапе S25, после выполнения второго управления уменьшением крутящего момента двигателя на этапе S24, определяется то, устанавливается или нет "частота вращения при проскальзывании ≤ N2". Если "Да" ("частота вращения при проскальзывании ≤ N2"), процесс переходит к этапу S25, а если "Нет" ("частота вращения при проскальзывании > N2"), процесс возвращается к этапу S24.
Здесь, "второе заданное значение N2" является пороговым значением для определения того, что частота вращения при проскальзывании переходит в область, в которой муфта может считаться зацепленной, и задается, например, равным значению приблизительно N2=50 об/мин, которое является значением, идентичным второму заданному значению N2, используемому на этапе S10 по фиг. 2.
На этапе S26, после определения того, что "частота вращения при проскальзывании ≤ N2", на этапе S25, выполняется управление прекращением уменьшения крутящего момента для возврата значения уменьшения крутящего момента двигателя 1 к нормальному крутящему моменту с использованием заданного линейно-изменяющегося наклона, и процесс переходит к этапу S27.
Здесь, заданный линейно-изменяющийся наклон, посредством которого крутящий момент двигателя повышается посредством управления прекращением уменьшения крутящего момента, вычисляется таким образом, что линейно-изменяющийся наклон увеличивается по мере того, как увеличивается величина APO открытия позиции педали акселератора, как указано посредством карты линейно-изменяющегося наклона по фиг. 5.
На этапе S27, после управления прекращением уменьшения крутящего момента на этапе S26, определяется то, превышает или нет значение команды управления уменьшением крутящего момента крутящий момент двигателя перед выдачей команды управления уменьшением крутящего момента. Если "Да" ("значение команды управления уменьшением крутящего момента > крутящий момент двигателя перед выдачей команды управления уменьшением крутящего момента"), процесс переходит к этапу S28, а если "Нет" ("значение команды управления уменьшением крутящего момента ≤ крутящий момент двигателя перед выдачей команды управления уменьшением крутящего момента"), определение этапа S27 повторяется.
На этапе S28, после определения того, что "значение команды управления уменьшением крутящего момента > крутящий момент двигателя перед выдачей команды управления уменьшением крутящего момента", на этапе S27, управление уменьшением крутящего момента двигателя завершается, и процесс переходит к концу.
Здесь, окончание управления уменьшением крутящего момента двигателя выполняется посредством прекращения вывод сигнала уменьшения крутящего момента двигателя в модуль 11 управления двигателем через линию 13 CAN-связи.
Далее описываются операции.
Ниже отдельно описываются "операция процесса управления блокировкой при начальном движении", "операция процесса совместного управления", "операция управления блокировкой при начальном движении", "операция совместного управления блокирующей муфтой и двигателем" и "характерная операция при совместном управлении", относительно операций управления в оснащенном двигателем транспортном средстве первого варианта осуществления.
Операция процесса управления блокировкой при начальном движении
Ниже описывается операция процесса управления блокировкой при начальном движении, на основе блок-схемы последовательности операций способа, проиллюстрированной на фиг. 2.
Когда операция отпускания педали тормоза выполняется из остановленного состояния с включенным тормозом/выключенным акселератором, процесс переходит от "этап S1 --> этап S2 --> этап S3" на блок-схеме последовательности операций способа по фиг. 2. На этапе S2, значение LU-команды задается в качестве давления состояния готовности, чтобы заполнять гидравлическую схему в блокирующей муфте 3 гидравлическим маслом, и на этапе S3, определяется то, устанавливается или нет "акселератор выключен --> включен". Затем при условии, что определяется то, что акселератор выключен, на этапе S3, последовательность операций, переходящая от "этап S2 --> этап S3", повторяется, и "значение LU-команды=давление состояния готовности" поддерживается.
Когда операция нажатия педали акселератора выполняется с намерением трогания с места транспортного средства после операции отпускания педали тормоза, и определяется то, что "акселератор выключен --> включен" устанавливается, на этапе S3, процесс переходит от этапа S3 к этапу S4 на блок-схеме последовательности операций способа по фиг. 2. На этапе S4, определяется то, превышает или нет значение T таймера, подсчет которого начат, когда операция нажатия педали акселератора определена, время T1 задержки согласно значению LU-команды. Затем в то время как определяется то, что T≤T1, повторяется определение этапа S4. Таким образом, в течение периода от операции нажатия педали акселератора до момента, пока время T1 задержки согласно значению LU-команды не истекает, состояние готовности поддерживается со значением LU-команды, заданным в качестве давления состояния готовности.
Когда время T1 задержки согласно значению LU-команды истекает от операции нажатия педали акселератора, процесс переходит от "этап S4 --> этап S5 --> этап S6" на блок-схеме последовательности операций способа по фиг. 2. На этапе S5, значение LU-команды повышается с использованием линейно-изменяющегося наклона для формирования LU-давления, и на этапе S6, определяется то, превышает или нет значение LU-команды заданное значение. Затем при условии, что определяется то, что "значение LU-команды ≤ заданное значение", на этапе S6, последовательность операций, которая переходит от "этап S5 --> этап S6", повторяется. Таким образом, значение LU-команды повышается от значения для получения давления состояния готовности до значения для получения начального давления точки пересечения, при котором перегрузочная LU-способность начинает выводиться с использованием линейно-изменяющегося наклона для формирования LU-давления.
Когда значение LU-команды превышает заданное значение, и перегрузочная LU-способность начинает выводиться, процесс переходит от "этап S6 --> этап S7 --> этап S8", на блок-схеме последовательности операций способа по фиг. 2. На этапе S7, выполняется управление перегрузочной способностью блокирующей муфты (FB-управление) для блокирующей муфты 3, и на этапе S8, определяется то, достигает или опускается ниже либо нет частота вращения при проскальзывании первого заданного значения N1. Затем при условии, что определяется то, что "частота вращения при проскальзывании > N1", на этапе S8, последовательность операций, которая переходит от "этап S7 --> этап S8", повторяется. Таким образом, в течение периода от момента, когда перегрузочная LU-способность начинает выводиться, до момента, когда частота вращения при проскальзывании блокирующей муфты 3 достигает первого заданного значения N1 (например, N1=200 об/мин), перегрузочная способность блокирующей муфты для блокирующей муфты 3 управляется с использованием управления с обратной связью. При этом управлении с обратной связью, перегрузочная способность блокирующей муфты управляется таким образом, чтобы исключать отклонение между фактической частотой вращения при проскальзывании и целевой частотой вращения при проскальзывании, т.е. чтобы обеспечивать схождение фактической частоты вращения при проскальзывании и целевой частоты вращения при проскальзывании, независимо от флуктуаций входного крутящего момента (= крутящий момент двигателя).
Когда частота вращения при проскальзывании блокирующей муфты 3 достигает или опускается ниже первого заданного значения N1, процесс переходит от "этап S8 --> этап S9 --> этап S10", на блок-схеме последовательности операций способа по фиг. 2. На этапе S9, выполняется линейно-изменяющееся управление (FF-управление) для повышения значения LU-команды с использованием заданного линейно-изменяющегося наклона. На этапе S10 определяется то, достигает или опускается ниже либо нет частота вращения при проскальзывании второго заданного значения N2. Затем при условии, что определяется то, что "частота вращения при проскальзывании > N2", на этапе S10, последовательность операций, которая переходит от "этап S8 --> этап S9 --> этап S10", повторяется. Таким образом, в области управления плавным включением, в которой частота вращения при проскальзывании находится между первым заданным значением N1 (например, N1=200 об/мин) и вторым заданным значением N2 (например, N2=50 об/мин), перегрузочная способность блокирующей муфты для блокирующей муфты 3 управляется посредством управления с прямой связью, имеющего быструю реакцию на управляющее воздействие. Если после того, как начинается управление с прямой связью, частота вращения при проскальзывании превышает первое заданное значение N1 вследствие некоторого фактора, также подготавливается последовательность операций, в которой процесс возвращается от этапа S8 к этапу S7, чтобы повторно начинать управление с обратной связью.
Когда частота вращения при проскальзывании блокирующей муфты 3 достигает или опускается ниже второго заданного значения N2, процесс переходит от "этап S10 --> этап S11 --> этап S12" на блок-схеме последовательности операций способа по фиг. 2. На этапе S11, выполняется управление LU-зацеплением (FF-управление), и на этапе S12, определяется то, достигает или опускается ниже либо нет частота вращения при проскальзывании третьего заданного значения N3. Затем при условии, что определяется то, что "частота вращения при проскальзывании > N3", на этапе S12, последовательность операций, которая переходит от "этап S11 --> этап S12", повторяется. Таким образом, управление зацеплением для быстрого переключения блокирующей муфты 3 в зацепленное состояние выполняется посредством управления с прямой связью, имеющего быструю реакцию на управляющее воздействие, когда частота вращения при проскальзывании блокирующей муфты 3 находится между вторым заданным значением N2 (например, N2=50 об/мин) до достижения третьего заданного значения N3 (например, N3=10 об/мин).
Когда частота вращения при проскальзывании блокирующей муфты 3 достигает или опускается ниже третьего заданного значения N3, процесс переходит от "этап S12 --> этап S13 --> конец" на блок-схеме последовательности операций способа по фиг. 2. На этапе S13, выполняется управление (FF-управление) для того, чтобы максимизировать перегрузочную LU-способность. Таким образом, посредством выполнения управления с прямой связью (FF-управления) для повышения значения LU-команды до максимального значения пошагово, блокирующая муфта 3 переводится в полностью зацепленное состояние.
Операция процесса совместного управления
Ниже описывается операция процесса совместного управления, на основе блок-схемы последовательности операций способа, проиллюстрированной на фиг. 3.
Когда операция нажатия педали акселератора выполняется с намерением трогать с места транспортное средство из остановленного состояния с выключенным тормозом, процесс переходит от "этап S22 --> этап S21 --> этап S23" на блок-схеме последовательности операций способа по фиг. 3. На этапе S22, выполняется управление уменьшением крутящего момента двигателя (первое управление уменьшением крутящего момента двигателя). На этапе S23, определяется то, "частота вращения при проскальзывании ≤ N1" и "увеличение степени нажатия педали акселератора присутствует". Затем при условии, что определяется то, что "частота вращения при проскальзывании > N1", или то, что "увеличение степени нажатия педали акселератора отсутствует", на этапе S23, последовательность операций, которая переходит от "этап S22 --> этап S23", повторяется. Таким образом, выполняется первое управление уменьшением крутящего момента двигателя, при котором операция нажатия педали акселератора задается в качестве начального условия, и крутящий момент двигателя уменьшается от крутящего момента Ten1 двигателя в нормальном состоянии до крутящего момента Tem1 двигателя согласно карте 1, когда, например, величина открытия позиции педали акселератора составляет APO1. Значение ΔTe1 уменьшения крутящего момента от нормального крутящего момента при этом первом управлении уменьшением крутящего момента двигателя задается в качестве значения, меньшего значения ΔTe2 уменьшения крутящего момента от нормального крутящего момента при втором управлении уменьшением крутящего момента двигателя, которое описывается ниже.
Когда частота вращения при проскальзывании блокирующей муфты 3 достигает или опускается ниже первого заданного значения N1 (например, N1=200 об/мин) посредством управления блокировкой при начальном движении, и выполняется операция увеличения степени нажатия педали акселератора, процесс переходит от "этап S23 --> этап S24 --> этап S25" на блок-схеме последовательности операций способа по фиг. 3. На этапе S24, выполняется управление уменьшением крутящего момента двигателя (второе управление уменьшением крутящего момента двигателя). На этапе S25, определяется то, "частота вращения при проскальзывании ≤ N2 или нет". Затем при условии, что определяется то, что "частота вращения при проскальзывании > N2", на этапе S25, последовательность операций, которая переходит от "этап S24 --> этап S25", повторяется. Таким образом, выполняется второе управление уменьшением крутящего момента двигателя, при котором "частота вращения при проскальзывании ≤ N1" и "присутствие увеличения степени нажатия педали акселератора" задаются в качестве начальных условий, и крутящий момент двигателя уменьшается с крутящего момента двигателя в нормальном состоянии Ten2 до крутящего момента Tem2 двигателя согласно карте 2, когда, например, величина открытия позиции педали акселератора составляет APO2. Значение ΔTe2 уменьшения крутящего момента от нормального крутящего момента при этом втором управлении уменьшением крутящего момента двигателя задается в качестве значения, большего значения ΔTe1 уменьшения крутящего момента от нормального крутящего момента при предыдущем первом управлении уменьшением крутящего момента двигателя.
Когда частота вращения при проскальзывании блокирующей муфты 3 достигает или опускается ниже второго заданного значения N2 (например, N2=50 об/мин) посредством управления блокировкой при начальном движении, процесс переходит от "этап S25 --> этап S26 --> этап S27" на блок-схеме последовательности операций способа по фиг. 3. На этапе S26, выполняется управление прекращением уменьшения крутящего момента для возврата значения уменьшения крутящего момента двигателя 1 к нормальному крутящему моменту с использованием заданного линейно-изменяющегося наклона. На этапе S27, определяется то, превышает или нет значение команды управления уменьшением крутящего момента крутящий момент двигателя перед выдачей команды управления уменьшением крутящего момента. Затем при условии, что определяется то, что "значение команды управления уменьшением крутящего момента ≤ крутящий момент двигателя перед выдачей команды управления уменьшением крутящего момента", определение этапа S27 повторяется. Таким образом, управление прекращением уменьшения крутящего момента начинается, чтобы начинать восстановление крутящего момента двигателя к нормальному крутящему моменту, в состоянии, в котором частота вращения при проскальзывании блокирующей муфты 3 достигает или опускается ниже второго заданного значения N2. Линейно-изменяющийся наклон, с которым крутящий момент двигателя повышается в это время, увеличивается по мере того, как увеличивается величина APO открытия позиции педали акселератора.
Когда "значение команды управления уменьшением крутящего момента > крутящий момент двигателя перед выдачей команды управления уменьшением крутящего момента" устанавливается вследствие выполнения управления прекращением уменьшения крутящего момента, процесс переходит от "этап S27 --> этап S28 --> конец" на блок-схеме последовательности операций способа по фиг. 3. На этапе S28, управление уменьшением крутящего момента двигателя завершается посредством вывода сигнала запроса на завершение управления уменьшением крутящего момента двигателя в модуль 11 управления двигателем через линию 13 CAN-связи.
Операция управления блокировкой при начальном движении
Ниже описывается операция управления блокировкой при начальном движении, на основе временных диаграмм, проиллюстрированных на фиг. 6 и фиг. 7.
На фиг. 6 и фиг. 7, время t0 является временем выполнения операции выключения тормоза, время t1 является временем выполнения операции нажатия педали акселератора, время t2 является временем окончания времени задержки согласно значению LU-команды от включенного акселератора, и время t3 является временем формирования перегрузочной способности блокирующей муфты. Время t4 является временем наступления первого заданного значения частоты вращения при проскальзывании, время t5 является временем операции увеличения степени нажатия педали акселератора, время t6 является временем наступления второго заданного значения частоты вращения при проскальзывании, и время t7 является временем наступления третьего заданного значения частоты вращения при проскальзывании.
Управление блокировкой при начальном движении примерно разделено на область управления длиной хода (время t0-t3), область управления проскальзыванием (время t3-t4) и область управления плавным включением (время t4-t7).
Область управления длиной хода (время t0-t3) представляет собой секцию, в которой блокирующая муфта 3 переключается из полностью расцепленного состояния в состояние хода муфты, в котором перегрузочная способность блокирующей муфты начинает возникать посредством управления с прямой связью. Эта область управления длиной хода разделяется на управление в состоянии готовности, управление задержкой и линейно-изменяющееся управление.
Когда тормоз первый раз (время t0) переключается из включенного в выключенное состояние, выполняется управление в состоянии готовности, чтобы увеличивать гидравлическое давление при блокировке до давления состояния готовности (время t0-t1).
После этого, когда акселератор переключается из выключенного во включенное состояние (время t1), управление задержкой выполняется для того, чтобы переходить в состояние готовности без изменения гидравлического давления при блокировке в течение заданного времени (время t1-t2).
После того, как управление задержкой заканчивается, линейно-изменяющееся управление выполняется для того, чтобы увеличивать гидравлическое давление с использованием заданного линейно-изменяющегося наклона в течение заданного времени (время t2-t3). После этого, процесс переключается в область управления проскальзыванием.
Область управления проскальзыванием (время t3-t4) представляет собой секцию, в которой частота вращения при проскальзывании блокирующей муфты 3 постепенно уменьшается посредством управления с обратной связью.
В частности, выполняется управление с обратной связью, которое регулирует перегрузочную способность блокирующей муфты в соответствии с флуктуациями крутящего момента двигателя таким образом, что фактическая частота вращения при проскальзывании приближается к целевой частоте вращения при проскальзывании. Флуктуация величины изменения частоты вращения при проскальзывании в единицу времени подавляется, и внезапные изменения частоты вращения при проскальзывании подавляются посредством этого управления с обратной связью. Эта область управления проскальзыванием завершается (время t4) когда определяется то, что блокирующая муфта 3 переходит в состояние непосредственно перед зацеплением вследствие того, что частота вращения при проскальзывании становится равной или меньшей первого заданного значения N1 (например, 200 об/мин). После этого, процесс переключается в область управления плавным включением.
Область управления плавным включением (время t4-t7) представляет собой секцию для того, чтобы плавно зацеплять блокирующую муфту 3 непосредственно перед зацеплением посредством состояния зацепления в режиме проскальзывания посредством управления с прямой связью. Эта область управления плавным включением представляет собой участок области управления проскальзыванием и разделяется на следующие трехстадийные виды управления. Здесь, область управления плавным включением представляет собой область управления проскальзыванием согласно управлению с прямой связью в области сходимости проскальзывания и участке области управления проскальзыванием, относительно области управления проскальзыванием согласно управлению с обратной связью (время t3-t4).
Когда частота вращения при проскальзывании блокирующей муфты 3 находится между первым заданным значением N1 (например, 200 об/мин) и вторым заданным значением N2 (например, 50 об/мин), внезапное зацепление предотвращается, и формирование толчка, вызываемого в силу этого, предотвращается посредством увеличения перегрузочной способности блокирующей муфты с использованием линейно-изменяющегося наклона, имеющего относительно пологий градиент (время t4-t6).
После этого, когда частота вращения при проскальзывании блокирующей муфты 3 достигает или опускается ниже второго заданного значения N2 (например, 50 об/мин), блокирующая муфта 3 считается зацепленной, и перегрузочная способность блокирующей муфты увеличивается с использованием относительно крутого линейно-изменяющегося наклона второй стадии (время t6-t7). Здесь, второе заданное значение N2 представляет собой частоту вращения при проскальзывании, при которой частота вращения при проскальзывании является достаточно небольшой, и при которой не должен возникать толчок вследствие внезапного зацепления, даже если гидравлическое давление при блокировке увеличивается.
Когда частота вращения при проскальзывании блокирующей муфты 3 достигает или опускается ниже третьего заданного значения N3 (например, 10 об/мин), считается, что проскальзывание муфты исключено из управления, и перегрузочная способность блокирующей муфты увеличивается до максимального значения, чтобы переводить блокирующую муфту 3 в зацепленное состояние. Затем область управления плавным включением завершается во время t7.
Операция совместного управления блокирующей муфтой и двигателем
Случай, в котором управление блокировкой при начальном движении блокирующей муфты выполняется независимо, без выполнения совместного управления с использованием управления уменьшением крутящего момента двигателя, аналогично первому варианту осуществления, должен рассматриваться как сравнительный пример. Далее описывается операция управления блокировкой при начальном движении в сравнительном примере со ссылкой на временную диаграмму, показанную на фиг. 6.
В этом сравнительном примере, предполагается, что операция увеличения степени нажатия педали акселератора выполняется с временным интервалом времени t5 непосредственно перед тем, как блокирующая муфта зацепляется, во время управления проскальзыванием при управлении блокировкой при начальном движении, как проиллюстрировано посредством характеристики величины открытия позиции педали акселератора (характеристики APO) на фиг. 6.
В соответствии с этой операцией увеличения степени нажатия педали акселератора во время t5, крутящий момент двигателя увеличивается после времени t5, как проиллюстрировано посредством характеристики крутящего момента двигателя, показанной на фиг. 6. Когда крутящий момент двигателя увеличивается, крутящий момент двигателя, который вводится в блокирующую муфту, превышает перегрузочную способность блокирующей муфты (= крутящий момент зацепления муфты) для блокирующей муфты во время управления проскальзыванием. Как результат, даже если это возникает непосредственно перед тем, как блокирующая муфта зацепляется, возникает так называемое расслоение вращения, при котором частота вращения при проскальзывании, которая уменьшена во время t5, переключается на увеличение после времени t5, как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки A на фиг. 6. На фиг. 6, частота вращения при проскальзывании выражается посредством разности между фактической частотой вращения двигателя и частотой вращения турбины.
При возникновении этого расслоения вращения, возникают толчок при зацеплении и толчкообразная вибрация (самовозбуждающаяся вибрация). "Толчкообразная вибрация" представляет собой самовозбуждающуюся вибрацию в высокочастотной области, которая возбуждается посредством перехода в область, в которой коэффициент μ трения становится характеристикой отрицательного градиента вследствие увеличения относительной частоты v вращения, вызываемого посредством расслоения вращения. Эта толчкообразная вибрация возникает в области увеличения частоты вращения при проскальзывании после времени t5. Поскольку частота вращения при проскальзывании, которая уменьшается вплоть до момента непосредственно перед зацеплением, переключается на увеличение снова вследствие расслоения вращения, возникает "толчок при зацеплении" в качестве варьирования продольной составляющей G, которое возникает вследствие внезапного зацепления муфты для схождения частоты вращения при проскальзывании, которая увеличивается после времени t5 за короткий период времени. Этот толчок при зацеплении формируется главным образом в области повторного зацепления во время t6-t7.
Напротив, в первом варианте осуществления, операция нажатия педали акселератора задается в качестве начального условия, и во-первых, первое управление уменьшением крутящего момента двигателя выполняется для того, чтобы уменьшать крутящий момент двигателя в первой стадии. После этого, когда следующие условия удовлетворяются: "частота вращения при проскальзывании ≤ N1" с "увеличение степени нажатия педали акселератора присутствует", во время первого управления уменьшением крутящего момента двигателя, второе управление уменьшением крутящего момента двигателя выполняется для того, чтобы дополнительно уменьшать крутящий момент двигателя на второй стадии. Ниже описывается операция совместного управления блокирующей муфтой 3 и двигателем 1 в первом варианте осуществления, на основе временной диаграммы, проиллюстрированной на фиг. 7.
Когда операция нажатия педали акселератора выполняется во время t1, от времени t1 до времени t5, причем в этот момент удовлетворяются начальные условия второго управления уменьшением крутящего момента двигателя, выполняется первое управление уменьшением крутящего момента двигателя, как проиллюстрировано посредством характеристики сигнала уменьшения крутящего момента на фиг. 7. При выполнении этого первого управления уменьшением крутящего момента двигателя, как указано посредством характеристики крутящего момента двигателя согласно сплошной линии на фиг. 7 (время t1-t5), крутящий момент двигателя уменьшается по сравнению с характеристикой в форме пунктирной линии согласно нормальному крутящему моменту двигателя, когда управление уменьшением крутящего момента не выполняется. В соответствии с этим уменьшением крутящего момента двигателя, как указано посредством характеристики фактической частоты вращения двигателя согласно сплошной линии на фиг. 7 (время t1-t5), фактическая частота вращения двигателя уменьшается по сравнению с характеристикой в форме пунктирной линии согласно нормальной фактической частоте вращения двигателя, когда управление уменьшением крутящего момента не выполняется.
Посредством выполнения этого первого управления уменьшением крутящего момента двигателя, набор оборотов двигателя 1 во время t1-t2 подавляется, как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки B на фиг. 7. Помимо этого, поскольку фактическая частота вращения двигателя уменьшается, максимальная частота вращения при проскальзывании уменьшается, и зацепление блокирующей муфты становится возможным на ранней стадии; в силу этого может ожидаться повышение эффективности использования топлива.
Когда частота вращения при проскальзывании достигает первого заданного значения N1 во время t4, определение увеличения степени нажатия педали акселератора начинается. После этого, когда операция увеличения степени нажатия педали акселератора выполняется во время t5, как указано посредством характеристики величины открытия позиции педали акселератора (характеристики APO) на фиг. 7, условия: "частота вращения при проскальзывании ≤ N1" с "увеличение степени нажатия педали акселератора присутствует" во время первого управления уменьшением крутящего момента двигателя удовлетворяются. Когда эти условия удовлетворяются, второе управление уменьшением крутящего момента двигателя выполняется для того, чтобы дополнительно уменьшать крутящий момент двигателя на второй стадии от времени t5 до времени t6, когда "частота вращения при проскальзывании ≤ N2" удовлетворяется, как указано посредством характеристики сигнала уменьшения крутящего момента на фиг. 7. При выполнении этого второго управления уменьшением крутящего момента двигателя, как указано посредством характеристики крутящего момента двигателя согласно сплошной линии, показанной на фиг. 7 (время t5-t6), увеличение крутящего момента двигателя подавляется по сравнению с характеристикой в форме пунктирной линии согласно нормальному крутящему моменту двигателя, когда управление уменьшением крутящего момента не выполняется. Поскольку увеличение крутящего момента двигателя подавляется, крутящий момент двигателя, который вводится в блокирующую муфту 3, не превышает перегрузочную способность блокирующей муфты для блокирующей муфты 3 во время управления проскальзыванием. Соответственно, как указано посредством характеристики фактической частоты вращения двигателя по фиг. 7 (время t5-t6), фактическая частота вращения двигателя (характеристика в форме сплошной линии) от времени t5 выполнения операции увеличения степени нажатия педали акселератора уменьшается, тогда как фактическая частота вращения двигателя (характеристика в форме пунктирной линии) увеличивается, когда управление уменьшением крутящего момента не выполняется.
Следовательно, посредством выполнения второго управления уменьшением крутящего момента двигателя, расслоение вращения, к примеру, в сравнительном примере может подавляться, как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки C на фиг. 7. Таким образом, частота вращения при проскальзывании, выражаемая как разность между фактической частотой вращения двигателя и частотой вращения турбины, уменьшается от времени t5 до времени t7, когда удовлетворяется "частота вращения при проскальзывании ≤ N3". Как результат, можно предотвращать толчок при зацеплении и толчкообразную вибрацию (самовозбуждающуюся вибрацию), которые формируются при возникновении расслоения вращения.
Характерная операция совместного управления
В первом варианте осуществления, во время управления проскальзыванием при управлении блокировкой при начальном движении, если частота вращения при проскальзывании переходит в область управления плавным включением, которая равна или ниже первого заданного значения N1, выполняется второе управление уменьшением крутящего момента двигателя, которое уменьшает крутящий момент двигателя 1 таким образом, что он ниже нормального крутящего момента, который прикладывается в ответ на запрос водителя.
Таким образом, частота вращения при проскальзывании блокирующей муфты 3 уменьшается, и частота вращения при проскальзывании достигает или опускается ниже первого заданного значения N1 непосредственно перед тем, как блокирующая муфта 3 зацепляется. Соответственно, увеличение крутящего момента двигателя подавляется посредством выполнения второго управления уменьшением крутящего момента двигателя, даже если операция увеличения степени нажатия педали акселератора выполняется в области непосредственно перед тем, как блокирующая муфта 3 зацепляется. Следовательно, крутящий момент двигателя не превышает перегрузочную способность блокирующей муфты, и так называемое расслоение вращения, при котором частота вращения при проскальзывании переключается с уменьшения на увеличение, предотвращается.
Как результат, можно предотвращать возникновение толчка при зацеплении и толчкообразной вибрации во время управления проскальзыванием при управлении блокировкой при начальном движении, даже если операция увеличения степени нажатия педали акселератора выполняется непосредственно перед тем, как блокирующая муфта 3 зацепляется.
Здесь, "нормальный крутящий момент" представляет собой крутящий момент двигателя во время нормального движения, когда вообще не выполняется уменьшение крутящего момента. Таким образом, он представляет собой режим, в котором когда величина APO открытия позиции педали акселератора является максимальной (полностью открыта), величина открытия дроссельного клапана двигателя 1 представляет собой "полностью открыта" таким образом, чтобы прилагать максимальный крутящий момент двигателя относительно частоты вращения двигателя, и когда величина APO открытия позиции педали акселератора отличается от максимума, величина открытия дросселя задается равной заданному значению таким образом, что количественное отношение фактического крутящего момента двигателя относительно максимального крутящего момента двигателя увеличивается по мере того, как увеличивается количественное отношение фактической величины открытия позиции педали акселератора относительно максимальной величины открытия позиции педали акселератора (см. карту крутящего момента двигателя в нормальном состоянии на фиг. 4).
Помимо этого, "второе управление уменьшением крутящего момента двигателя" выполняется посредством применения карты 2 уменьшения крутящего момента на фиг. 4, которая определяет верхнее предельное значение крутящего момента двигателя для каждой величины открытия позиции педали акселератора. Верхнее предельное значение крутящего момента двигателя, определенное посредством карты 2 уменьшения крутящего момента, задается меньше перегрузочной способности блокирующей муфты при выполнении управления плавным включением. Величина открытия дроссельного клапана двигателя 1 относительно величины APO открытия позиции педали акселератора задается меньше во время нормального состояния, описанного выше, таким образом, что она не превышает это верхнее предельное значение крутящего момента двигателя.
В первом варианте осуществления, начальное условие второго управления уменьшением крутящего момента двигателя заключается в том, что частота вращения при проскальзывании равна или меньше первого заданного значения N1, и в том, что "увеличение степени нажатия педали акселератора присутствует".
Таким образом, посредством добавления условия операции увеличения степени нажатия педали акселератора, можно исключать необязательное уменьшение крутящего момента двигателя, когда "увеличение степени нажатия педали акселератора отсутствует" после перехода к управлению плавным включением, и в силу этого отсутствует риск возникновения расслоения вращения.
Следовательно, можно разрешать такую проблему, что дискомфорт вызывается у водителя вследствие отсутствия вывода крутящего момента во время необязательного уменьшения крутящего момента двигателя, описанного выше.
Здесь, "область, в которой частота вращения при проскальзывании равна или меньше первого заданного значения N1", представляет собой область управления плавным включением согласно управлению с прямой связью, в которой выводится значение LU-команды согласно заданной характеристике линейного изменения. Другими словами, область управления проскальзыванием, в которой частота вращения при проскальзывании превышает первое заданное значение N1 (время t3-t4), представляет собой область управления с обратной связью, в которой определяется целевая частота вращения при проскальзывании, и значение LU-команды выводится таким образом, что фактическая частота вращения при проскальзывании сходится с целевой частотой вращения при проскальзывании. Следовательно, даже если крутящий момент двигателя колеблется вследствие операции нажатия педали акселератора в области управления с обратной связью, выполняется управление для того, чтобы регулировать перегрузочную способность блокирующей муфты, согласно флуктуации крутящего момента двигателя. Напротив, область управления плавным включением, в которой частота вращения при проскальзывании равна или меньше первого заданного значения N1 (время t4-t7), представляет собой область управления с прямой связью, в которой выводится заданное значение LU-команды. Следовательно, отсутствует соответствие с повышением крутящего момента двигателя вследствие операции увеличения степени нажатия педали акселератора, и если выполняется операция увеличения степени нажатия педали акселератора, крутящий момент двигателя превышает перегрузочную способность блокирующей муфты, и возникновение так называемого расслоения вращения, при котором частота вращения при проскальзывании переключается с уменьшения на увеличение, разрешается. Следовательно, второе управление уменьшением крутящего момента двигателя выполняется только при необходимости, когда имеется высокая вероятность того, что расслоение вращения возникает, во время операции увеличения степени нажатия педали акселератора в области управления плавным включением.
В первом варианте осуществления, второе управление уменьшением крутящего момента двигателя завершается, когда частота вращения при проскальзывании блокирующей муфты 3 сходится таким образом, что она достигает или опускается ниже второго заданного значения N2, которое меньше первого заданного значения N1, при выполнении второго управления уменьшением крутящего момента двигателя.
Таким образом, если частота вращения при проскальзывании, которая становится равной нулю, задается в качестве условия завершения второго управления уменьшением крутящего момента двигателя, поскольку момент, что частота вращения при проскальзывании становится нулевой, не может определяться с использованием датчика, необходимо переходить в состояние готовности в течение заданного времени даже после того, как частота вращения при проскальзывании становится нулевой, чтобы определять нулевую частоту вращения. В этом случае, возникает проблема в том, что водитель ощущает запаздывание вследствие отсутствия вывода крутящего момента даже при выполнении определения нулевой частоты вращения, в дополнение ко времени ожидания до тех пор, пока частота вращения при проскальзывании не станет нулевой.
Следовательно, когда частота вращения при проскальзывании достигает или опускается ниже второго заданного значения N2, которое меньше первого заданного значения N1, считается, что блокирующая муфта 3 зацеплена при управлении, и второе управление уменьшением крутящего момента двигателя завершается. Здесь, второе заданное значение N2 представляет собой частоту вращения при проскальзывании, при которой частота вращения при проскальзывании является достаточно небольшой, и при которой не должен возникать толчок вследствие внезапного зацепления, даже если гидравлическое давление при блокировке увеличивается. В силу этого, появляется возможность сокращать время, когда водитель ощущает запаздывание, по сравнению со случаем, в котором выполняется вышеописанное определение "частота вращения при проскальзывании=0".
Здесь, когда второе управление уменьшением крутящего момента двигателя завершается, и крутящий момент двигателя возвращается к нормальному заданному значению, крутящий момент двигателя восстановлен до исходного значения согласно функции линейно-изменяющегося наклона, как указано посредством характеристики в рамке, указываемой посредством стрелки D на фиг. 7. Наклон функции линейно-изменяющегося наклона в это время имеет такую конфигурацию, в которой линейно-изменяющийся наклон увеличивается по мере того, как увеличивается величина APO открытия позиции педали акселератора, согласно карте линейно-изменяющегося наклона, показанной на фиг. 5. За счет этого можно хорошо реагировать на запрашиваемую водителями движущую силу. Карта линейно-изменяющегося наклона может предоставляться посредством характеристики, которая увеличивается пошагово для каждой области величины открытия позиции педали акселератора.
В первом варианте осуществления, значение ΔTe2 уменьшения крутящего момента двигателя от нормального крутящего момента Ten2, при выполнении второго управления уменьшением крутящего момента двигателя задается небольшим, когда величина APO открытия позиции педали акселератора является небольшой, и таким образом, что оно становится большим по мере того, как увеличивается величина APO открытия позиции педали акселератора. Таким образом, даже когда крутящий момент двигателя уменьшается, крутящий момент двигателя имеет тенденцию быть большим по мере того, как увеличивается величина APO открытия позиции педали акселератора в диапазоне, в котором не возникает расслоение вращения.
Соответственно, изменения крутящего момента двигателя относительно запроса на ускорение имеет тенденцию, идентичную тенденции в нормальном состоянии, и дискомфорт не вызывается у водителя. Верхнее предельное значение крутящего момента двигателя согласно карте 2 уменьшения крутящего момента задается таким образом, что крутящий момент двигателя становится меньшим по мере того, как уменьшается величина APO открытия позиции педали акселератора, как проиллюстрировано на фиг. 4.
В первом варианте осуществления, выполнение управления уменьшением крутящего момента двигателя начинается до того, как частота вращения при проскальзывании достигает или опускается ниже заданного значения (первого заданного значения N1) вследствие управления блокировкой при начальном движении.
Например, когда существует увеличение степени нажатия педали акселератора непосредственно перед тем, как блокирующая муфта 3 зацепляется, управление уменьшением крутящего момента двигателя выполняется для того, чтобы уменьшать крутящий момент двигателя от нормального крутящего момента до крутящего момента, определенного посредством карты 2 уменьшения крутящего момента. В этом случае, возникают случаи, в которых большой шаг уменьшения крутящего момента формируется во время начала управления, что может вызывать дискомфорт у водителя.
Напротив, во время трогания с места транспортного средства, первое управление уменьшением крутящего момента двигателя первой стадии (карта 1 уменьшения крутящего момента) начинается одновременно с тем, как акселератор сначала переключается из выключенного состояния во включенное. Поскольку это управление уменьшением крутящего момента первой стадии выполняется с начала, водитель не должен замечать, что уменьшение крутящего момента выполняется изначально. Как результат, когда увеличение степени нажатия педали акселератора выполняется непосредственно перед тем, как блокирующая муфта 3 зацепляется, и второе управление уменьшением крутящего момента двигателя выполняется для того, чтобы уменьшать крутящий момент двигателя до крутящего момента, определенного посредством карты 2 уменьшения крутящего момента, крутящий момент двигателя уже уменьшен до крутящего момента, определенного посредством карты 1 уменьшения крутящего момента. Соответственно, шаг уменьшения крутящего момента, который формируется, может быть небольшим, по сравнению со случаем, в котором управление уменьшением крутящего момента начинается, когда существует увеличение степени нажатия педали акселератора непосредственно перед тем, как блокирующая муфта 3 зацепляется.
Следовательно, можно разрешать такую проблему, что большой шаг уменьшения крутящего момента формируется, когда существует увеличение степени нажатия педали акселератора непосредственно перед тем, как блокирующая муфта 3 зацепляется, в силу этого вызывая дискомфорт у водителя.
В первом варианте осуществления, когда определяется операция трогания с места вследствие "акселератор выключен --> включен", первое управление уменьшением крутящего момента двигателя начинается, чтобы уменьшать крутящий момент двигателя 1 от нормального крутящего момента Te1, прикладываемого в ответ на запрос водителя, с использованием первого значения ΔTe1 уменьшения крутящего момента. Затем при выполнении первого управления уменьшением крутящего момента двигателя, когда частота вращения при проскальзывании достигает или опускается ниже первого заданного значения N1 вследствие управления блокировкой при начальном движении, и управление плавным включением начинается, оно переключается на выполнение второго управления уменьшением крутящего момента двигателя, которое изменяет значение уменьшения крутящего момента на второе значение ΔTe2 уменьшения крутящего момента, которое превышает первое значение ΔTe1 уменьшения крутящего момента.
Таким образом, во время трогания с места транспортного средства, первое управление уменьшением крутящего момента двигателя первой стадии (карта 1 уменьшения крутящего момента) начинается одновременно с тем, как акселератор сначала переключается из выключенного состояния во включенное. После этого, когда существует увеличение степени нажатия педали акселератора непосредственно перед тем, как блокирующая муфта 3 зацепляется, второе управление уменьшением крутящего момента двигателя второй стадии (карта 2 уменьшения крутящего момента) начинается. Таким образом, посредством разделения управления уменьшением крутящего момента двигателя на две стадии, можно задавать взаимосвязь "первое значение ΔTe1 уменьшения крутящего момента < второе значение ΔTe2 уменьшения крутящего момента" в качестве значений уменьшения крутящего момента.
Следовательно, можно обеспечивать трогание с места транспортного средства при приложении достаточного крутящего момента посредством первого управления уменьшением крутящего момента двигателя первой стадии, относительно запроса на ускорение водителя от момента непосредственно после операции трогания с места посредством "акселератор выключен --> включен".
Далее описываются преимущества.
Нижеперечисленные преимущества могут получаться посредством способа управления и устройства управления блокировкой оснащенного двигателем транспортного средства согласно первому варианту осуществления.
(1) В транспортном средстве (оснащенном двигателем транспортном средстве), содержащем преобразователь 4 крутящего момента, который имеет блокирующую муфту 3 и который размещается между двигателем 1 и трансмиссией (бесступенчатой трансмиссией 6),
- когда запрос на зацепление блокирующей муфты 3 выдается, выполняется управление блокировкой (управление блокировкой при начальном движении), за счет чего зацепление достигается через управление проскальзыванием, которое увеличивает перегрузочную способность блокирующей муфты и постепенно уменьшает частоту вращения при проскальзывании, которая представляет собой частоту дифференциального вращения входного/выходного вала блокирующей муфты 3 (фиг. 2), и
- во время управления проскальзыванием при управлении блокировкой (при управлении блокировкой при начальном движении), если частота вращения при проскальзывании достигает или опускается ниже заданного значения (первого заданного значения N1) (переходит к управлению плавным включением), выполняется управление уменьшением крутящего момента двигателя (второе управление уменьшением крутящего момента двигателя), которое уменьшает крутящий момент двигателя 1 до значения ниже нормального крутящего момента, который прикладывается в ответ на запрос водителя (S23 --> S24 на фиг. 3).
Соответственно, можно предоставлять способ управления блокировкой транспортного средства (оснащенного двигателем транспортного средства), который предотвращает возникновение толчка при зацеплении и толчкообразной вибрации во время управления проскальзыванием при управлении блокировкой (при управлении блокировкой при начальном движении), даже если операция увеличения степени нажатия педали акселератора выполняется непосредственно перед тем, как блокирующая муфта 3 зацепляется.
(2) Начальные условия управления уменьшением крутящего момента двигателя (второго управления уменьшением крутящего момента двигателя) задаются таким образом, что частота вращения при проскальзывании равна или меньше заданного значения (первого заданного значения N1) (в области управления плавным включением), и таким образом, что "увеличение степени нажатия педали акселератора присутствует" (S23 на фиг. 3).
Соответственно, помимо преимущества (1), управление уменьшением крутящего момента двигателя (второе управление уменьшением крутящего момента двигателя) не начинается, когда уменьшение крутящего момента двигателя не требуется, и можно уменьшать частоту, с которой дискомфорт вызывается у водителя вследствие отсутствия вывода крутящего момента двигателя.
(3) Управление уменьшением крутящего момента двигателя (второе управление уменьшением крутящего момента двигателя) завершается, когда частота вращения при проскальзывании блокирующей муфты 3 сходится таким образом, что она достигает или опускается ниже частоты вращения для определения зацепления муфты (второго заданного значения N2), которое меньше заданного значения (первого заданного значения N1) при выполнении управления уменьшением крутящего момента двигателя, (второго управления уменьшением крутящего момента двигателя).
Соответственно, помимо преимущества (1) или (2), появляется возможность сокращать время, когда водитель ощущает запаздывание вследствие отсутствия вывода крутящего момента двигателя, по сравнению со случаем, в котором "частота вращения при проскальзывании=0" определяется.
(4) Значение ΔTe2 уменьшения крутящего момента двигателя от нормального крутящего момента Ten2 при выполнении управления уменьшением крутящего момента двигателя, (второго управления уменьшением крутящего момента двигателя) задается небольшим, когда величина APO открытия позиции педали акселератора является небольшой, и задается таким образом, что оно становится большим по мере того, как увеличивается величина APO открытия позиции педали акселератора (фиг. 4).
Соответственно, помимо преимуществ (1)-()-(3), изменения крутящего момента двигателя относительно запроса на ускорение имеют тенденцию, идентичную тенденции в нормальном состоянии, и можно уменьшать дискомфорт, который вызывается у водителя.
(5) Управление блокировкой представляет собой управление блокировкой при начальном движении, выполняемое на основе определения операции трогания с места ("тормоз включен --> выключен"), и
- выполнение управления уменьшением крутящего момента двигателя начинается до того, как частота вращения при проскальзывании достигает или опускается ниже заданного значения (первого заданного значения N1) вследствие управления блокировкой при начальном движении.
Соответственно, помимо преимуществ (1)-(4), можно уменьшать дискомфорт, который вызывается у водителя вследствие возникновения большого шага уменьшения крутящего момента, когда существует увеличение степени нажатия педали акселератора непосредственно перед тем, как блокирующая муфта 3 зацепляется.
(6) Управление уменьшением крутящего момента двигателя включает в себя первое управление уменьшением крутящего момента двигателя и второе управление уменьшением крутящего момента двигателя,
- первое управление уменьшением крутящего момента двигателя начинается, когда определяется операция трогания с места ("акселератор выключен --> включен"), чтобы уменьшать крутящий момент двигателя 1 от нормального крутящего момента Te1, прикладываемого в ответ на запрос водителя, посредством первого значения ΔTe1 уменьшения крутящего момента, и
- второе управление уменьшением крутящего момента двигателя начинается, когда частота вращения при проскальзывании достигает или опускается ниже заданного значения (первого заданного значения N1) вследствие управления блокировкой при начальном движении (начинающегося при переходе к управлению плавным включением) при выполнении первого управления уменьшением крутящего момента двигателя, чтобы изменять значение уменьшения крутящего момента на второе значение ΔTe2 уменьшения крутящего момента, которое превышает первое значение ΔTe1 уменьшения крутящего момента.
Соответственно, помимо преимущества (5), посредством разделения управления уменьшением крутящего момента двигателя на две стадии, можно обеспечивать трогание с места транспортного средства при приложении достаточного крутящего момента посредством первого управления уменьшением крутящего момента двигателя первой стадии, относительно запроса на ускорение водителя от момента непосредственно после того, как выполняется операция трогания с места.
(7) В транспортном средстве (оснащенном двигателем транспортном средстве), содержащем преобразователь 4 крутящего момента, который имеет блокирующую муфту 3, которая размещается между двигателем 1 и трансмиссией (бесступенчатой трансмиссией 6), содержащий:
- модуль управления блокировкой (модуль управления блокировкой при начальном движении: фиг. 2), который достигает зацепления через управление проскальзыванием, которое увеличивает перегрузочную способность блокирующей муфты и постепенно уменьшает частоту вращения при проскальзывании, которая представляет собой частоту дифференциального вращения входного/выходного вала блокирующей муфты 3, когда запрос на зацепление блокирующей муфты 3 выдается, и
- модуль совместного управления (фиг. 3), который выполняет совместное управление блокирующей муфтой 3 и двигателем 1,
- если частота вращения при проскальзывании достигает или опускается ниже заданного значения (первого заданного значения N1) (переходит к управлению плавным включением) во время управления проскальзыванием модуля управления блокировкой (модуля управления блокировкой при начальном движении: фиг. 2), модуль совместного управления (фиг. 3) выполняет процесс, чтобы выполнять управление уменьшением крутящего момента двигателя (второе управление уменьшением крутящего момента двигателя), которое уменьшает крутящий момент двигателя 1 ниже нормального крутящего момента, который прикладывается в ответ на запрос водителя.
Соответственно, можно предоставлять устройство управления блокировкой транспортного средства (оснащенного двигателем транспортного средства), которое предотвращает возникновение толчка при зацеплении и толчкообразной вибрации во время управления проскальзыванием при управлении блокировкой (при управлении блокировкой при начальном движении), даже если операция увеличения степени нажатия педали акселератора выполняется непосредственно перед тем, как блокирующая муфта 3 зацепляется.
Второй вариант осуществления
Второй вариант осуществления представляет собой пример, в котором первое управление уменьшением крутящего момента двигателя первого варианта осуществления опускается, и только управление, которое соответствует второму управлению уменьшением крутящего момента двигателя первого варианта осуществления, выполняется во время управления проскальзыванием при управлении блокировкой.
Сначала описывается конфигурация.
Поскольку "общая конфигурация системы (фиг. 1)" и "конфигурация процесса управления блокировкой при начальном движении (фиг. 2)" во втором варианте осуществления являются идентичными конфигурациям в первом варианте осуществления, чертежам, их описания опускаются. Ниже описывается "конфигурация процесса совместного управления" второго варианта осуществления.
Конфигурация процесса совместного управления
Фиг. 8 иллюстрирует последовательность операций процесса совместного управления блокирующей муфтой 3 и двигателем 1, который выполняется в модуле 12 CVT-управления второго варианта осуществления (модуле совместного управления). Ниже описывается каждый этап на фиг. 8, показывающем конфигурацию процесса при совместном управлении блокирующей муфты 3 и двигателя 1 (процесс управления блокировкой при начальном движении+управление уменьшением крутящего момента двигателя), который начинается в остановленном состоянии с отключенным акселератором. Этот процесс совместного управления начинается одновременно с началом управления блокировкой при начальном движении.
На этапе S31, во время управления проскальзыванием при управлении блокировкой при начальном движении, определяется то, устанавливается или нет "частота вращения при проскальзывании ≤ N1", и то, что "увеличение степени нажатия педали акселератора присутствует", идентично этапу S23 на фиг. 3. Если "Да" ("частота вращения при проскальзывании ≤ N1" и "увеличение степени нажатия педали акселератора присутствует"), процесс переходит к этапу S24, а если "Нет" ("частота вращения при проскальзывании > N1" или "увеличение степени нажатия педали акселератора отсутствует"), процесс переходит к концу.
На этапе S32, после определения того, что "частота вращения при проскальзывании ≤ N1", и того, что "увеличение степени нажатия педали акселератора присутствует", на этапе S31, или определения того, что "частота вращения при проскальзывании > N2", на этапе S33, выполняется управление уменьшением крутящего момента двигателя, и процесс переходит к этапу S25.
Значение уменьшения крутящего момента при этом управлении уменьшением крутящего момента двигателя задается равным значению, полученному посредством вычитания крутящего момента двигателя согласно карте 2 из нормального крутящего момента двигателя, с использованием карты нормального крутящего момента двигателя и карты 2 уменьшения крутящего момента, проиллюстрированной на фиг. 4.
На этапе S33, после выполнения управления уменьшением крутящего момента двигателя на этапе S32, определяется то, устанавливается или нет "частота вращения при проскальзывании ≤ N2", идентично этапу S25 по фиг. 3. Если "Да" ("частота вращения при проскальзывании ≤ N2"), процесс переходит к этапу S34, а если "Нет" ("частота вращения при проскальзывании > N2"), процесс возвращается к этапу S32.
На этапе S34, после определения того, что "частота вращения при проскальзывании ≤ N2", на этапе S33, выполняется управление прекращением уменьшения крутящего момента для возврата значения уменьшения крутящего момента двигателя 1 к нормальному крутящему моменту с использованием заданного линейно-изменяющегося наклона, и процесс переходит к этапу S35.
На этапе S35, после управления прекращением уменьшения крутящего момента на этапе S34, определяется то, превышает или нет значение команды управления уменьшением крутящего момента крутящий момент двигателя перед выдачей команды управления уменьшением крутящего момента, идентично этапу S27 на фиг. 3. Если "Да" ("значение команды управления уменьшением крутящего момента > крутящий момент двигателя перед выдачей команды управления уменьшением крутящего момента"), процесс переходит к этапу S36, а если "Нет" ("значение команды управления уменьшением крутящего момента ≤ крутящий момент двигателя перед выдачей команды управления уменьшением крутящего момента"), определение этапа S35 повторяется.
На этапе S36, после определения того, что "значение команды управления уменьшением крутящего момента > крутящий момент двигателя перед выдачей команды управления уменьшением крутящего момента", на этапе S35, управление уменьшением крутящего момента двигателя завершается, и процесс переходит к концу, идентично этапу S28 на фиг. 3.
Здесь, окончание управления уменьшением крутящего момента двигателя выполняется посредством прекращения вывод сигнала уменьшения крутящего момента двигателя в модуль 11 управления двигателем через линию 13 CAN-связи.
Далее описываются операции.
Из операций во втором варианте осуществления, "операция процесса управления блокировкой при начальном движении", "операция управления блокировкой при начальном движении" и "характерная операция при совместном управлении" являются идентичными в первом варианте осуществления; в силу этого их описания опускаются. Ниже отдельно описываются "операция процесса совместного управления" и "операция совместного управления блокирующей муфтой и двигателем", относительно операций управления в оснащенном двигателем транспортном средстве второго варианта осуществления.
Операция процесса совместного управления
Ниже описывается операция процесса совместного управления, на основе блок-схемы последовательности операций способа, проиллюстрированной на фиг. 8.
Когда частота вращения при проскальзывании блокирующей муфты 3 достигает или опускается ниже первого заданного значения N1 (например, N1=200 об/мин) посредством управления блокировкой при начальном движении, и выполняется операция увеличения степени нажатия педали акселератора, процесс переходит от "этап S31 --> этап S332 --> этап S33" на блок-схеме последовательности операций способа по фиг. 8. На этапе S32, выполняется управление уменьшением крутящего момента двигателя. На этапе S33, определяется то, "частота вращения при проскальзывании ≤ N2 или нет". Затем при условии, что определяется то, что "частота вращения при проскальзывании > N2", на этапе S33, последовательность операций, которая переходит от "этап S32 --> этап S33", повторяется. Таким образом, выполняется управление уменьшением крутящего момента двигателя с использованием карты 2 уменьшения крутящего момента, при котором "частота вращения при проскальзывании ≤ N1" и "присутствие увеличения степени нажатия педали акселератора" задаются в качестве начальных условий. Значение уменьшения крутящего момента от нормального крутящего момента при управлении уменьшением крутящего момента двигателя задается равным значению ΔTe2 уменьшения крутящего момента, когда, например, величина открытия позиции педали акселератора после увеличения степени нажатия педали акселератора составляет APO2.
Когда частота вращения при проскальзывании блокирующей муфты 3 достигает или опускается ниже второго заданного значения N2 (например, N2=50 об/мин) посредством управления блокировкой при начальном движении, процесс переходит от "этап S33 --> этап S34 --> этап S35" на блок-схеме последовательности операций способа по фиг. 8. На этапе S34, выполняется управление прекращением уменьшения крутящего момента для возврата значения уменьшения крутящего момента двигателя 1 к нормальному крутящему моменту с использованием заданного линейно-изменяющегося наклона. На этапе S35, определяется то, превышает или нет значение команды управления уменьшением крутящего момента крутящий момент двигателя перед выдачей команды управления уменьшением крутящего момента. Затем при условии, что определяется то, что "значение команды управления уменьшением крутящего момента ≤ крутящий момент двигателя перед выдачей команды управления уменьшением крутящего момента", определение этапа S35 повторяется. Таким образом, управление прекращением уменьшения крутящего момента начинается, чтобы восстанавливать крутящий момент двигателя к нормальному крутящему моменту, в состоянии, в котором частота вращения при проскальзывании блокирующей муфты 3 достигает или опускается ниже второго заданного значения N2. Линейно-изменяющийся наклон, с которым крутящий момент двигателя повышается в это время, увеличивается по мере того, как увеличивается величина APO открытия позиции педали акселератора.
Когда "значение команды управления уменьшением крутящего момента > крутящий момент двигателя перед выдачей команды управления уменьшением крутящего момента" устанавливается вследствие выполнения управления прекращением уменьшения крутящего момента, процесс переходит от "этап S35 --> этап S36 --> конец", на блок-схеме последовательности операций способа по фиг. 8. На этапе S28, управление уменьшением крутящего момента двигателя завершается посредством вывода сигнала запроса на завершение управления уменьшением крутящего момента двигателя в модуль 11 управления двигателем через линию 13 CAN-связи.
Операция совместного управления блокирующей муфтой и двигателем
Во втором варианте осуществления, первое управление уменьшением крутящего момента двигателя первого варианта осуществления опускается, и выполняется управление уменьшением крутящего момента двигателя, когда удовлетворяются следующие условия: "частота вращения при проскальзывании ≤ N1" и "увеличение степени нажатия педали акселератора присутствует". Ниже описывается операция совместного управления блокирующей муфтой 3 и двигателем 1 во втором варианте осуществления, на основе временной диаграммы, проиллюстрированной на фиг. 9.
Когда операция нажатия педали акселератора выполняется во время t1, от времени t1 до времени t4, причем в этот момент частота вращения при проскальзывании достигает первого заданного значения N1, управление уменьшением крутящего момента двигателя не выполняется, как проиллюстрировано посредством характеристики сигнала уменьшения крутящего момента на фиг. 9. Когда частота вращения при проскальзывании достигает первого заданного значения N1 во время t4, определение увеличения степени нажатия педали акселератора начинается. После этого, когда операция увеличения степени нажатия педали акселератора выполняется во время t5, как указано посредством характеристики величины открытия позиции педали акселератора (характеристики APO) на фиг. 9, условия: "частота вращения при проскальзывании ≤ N1" и "присутствие увеличения степени нажатия педали акселератора" удовлетворяются. Когда эти условия удовлетворяются, управление уменьшением крутящего момента двигателя выполняется для того, чтобы уменьшать крутящий момент двигателя, от времени t5 до времени t6, когда "частота вращения при проскальзывании ≤ N2" удовлетворяется, как указано посредством характеристики сигнала уменьшения крутящего момента на фиг. 9. При выполнении этого управления уменьшением крутящего момента двигателя, как указано посредством характеристики крутящего момента двигателя согласно сплошной линии на фиг. 9 (время t5-t6), увеличение крутящего момента двигателя подавляется по сравнению с характеристикой в форме пунктирной линии согласно нормальному крутящему моменту двигателя, когда управление уменьшением крутящего момента не выполняется. Поскольку увеличение крутящего момента двигателя подавляется, крутящий момент двигателя, который вводится в блокирующую муфту 3, не превышает перегрузочную способность блокирующей муфты для блокирующей муфты 3 во время управления проскальзыванием. Соответственно, как указано посредством характеристики фактической частоты вращения двигателя по фиг. 9 (время t5-t6), фактическая частота вращения двигателя (характеристика в форме сплошной линии) от времени t5 выполнения операции увеличения степени нажатия педали акселератора переходит плоским способом, тогда как фактическая частота вращения двигателя (характеристика в форме пунктирной линии) увеличивается, когда управление уменьшением крутящего момента не выполняется.
Следовательно, посредством выполнения управления уменьшением крутящего момента двигателя, расслоение вращения, к примеру, в сравнительном примере может подавляться, как проиллюстрировано посредством характеристики в рамке, указываемой посредством стрелки C' на фиг. 9. Таким образом, частота вращения при проскальзывании, выражаемая как разность между фактической частотой вращения двигателя и частотой вращения турбины, уменьшается от времени t5 до времени t7, когда удовлетворяется "частота вращения при проскальзывании ≤ N3". Как результат, можно предотвращать толчок при зацеплении и толчкообразную вибрацию (самовозбуждающуюся вибрацию), которые формируются при возникновении расслоения вращения.
Далее описываются преимущества.
В способе управления и устройстве управления блокировкой оснащенного двигателем транспортного средства согласно второму варианту осуществления, можно получать преимущества (1), (2), (3), (4) и (7), полученные посредством исключения преимуществ (5) и (6) из числа преимуществ (1)-(7) первого варианта осуществления вследствие опускания первого управления уменьшением крутящего момента двигателя.
Способ управления и устройство управления блокировкой транспортного средства настоящего изобретения описаны выше на основе первого и второго вариантов осуществления, но их конкретные конфигурации не ограничены этими вариантами осуществления, и различные модификации и добавления в проектные решения могут вноситься без отступления от объема изобретения согласно каждому пункту в формуле изобретения.
В первом и втором вариантах осуществления, показаны примеры, в которых выполняется управление уменьшением крутящего момента двигателя, когда удовлетворяются следующие условия: при нахождении в области управления плавным включением, в которой "частота вращения при проскальзывании ≤ N1" и "увеличение степени нажатия педали акселератора присутствует". Тем не менее, при переходе в область управления плавным включением, в которой "частота вращения при проскальзывании ≤ N1", управление уменьшением крутящего момента двигателя может выполняться независимо от присутствия/отсутствия операции увеличения степени нажатия педали акселератора, чтобы предотвращать, заранее, расслоение вращения, когда существует операция увеличения степени нажатия педали акселератора.
В первом варианте осуществления, показан пример, в котором управление уменьшением крутящего момента двигателя выполняется с использованием двух карт 1 и 2 уменьшения крутящего момента. Тем не менее, управление уменьшением крутящего момента двигателя, например, может использовать только карту 2 уменьшения крутящего момента и выполняться просто со времени начального переключения акселератора из выключенного во включенное состояние. Тем не менее, в этом случае, достаточный крутящий момент не может прилагаться относительно запроса на ускорение водителя, выданного непосредственно после того, как акселератор переключается из выключенного во включенное состояние. Соответственно, более предпочтительно использовать две карты 1 и 2 уменьшения крутящего момента.
В первом варианте осуществления, показан пример, в котором управление блокировкой представляет собой управление блокировкой при начальном движении, в котором процесс зацепления блокирующей муфты начинается на основе определения операции трогания с места. Тем не менее, управление блокировкой может представлять собой управление блокировкой в ходе движения, при котором запрос на зацепление блокирующей муфты выдается, когда скорость транспортного средства достигает или превышает заданную скорость транспортного средства при движении, чтобы начинать процесс зацепления блокирующей муфты, либо к нему может применяться совместное управление настоящего изобретения.
В первом и втором вариантах осуществления, показаны примеры, в которых способ управления и устройство управления блокировкой настоящего изобретения применяются к оснащенному двигателем транспортному средству, оснащенному преобразователем крутящего момента и бесступенчатой трансмиссией. Тем не менее, устройство управления блокирующей муфтой настоящего изобретения может применяться к гибридному транспортному средству, и трансмиссия может представлять собой ступенчатую трансмиссию, которая выполняет ступенчатое автоматическое переключение передач, при условии что транспортное средство оснащено двигателем в качестве источника приведения в движение. Вкратце, устройство управления блокирующей муфтой может применяться к любому транспортному средству, содержащему преобразователь крутящего момента, содержащий блокирующую муфту между двигателем и трансмиссией.
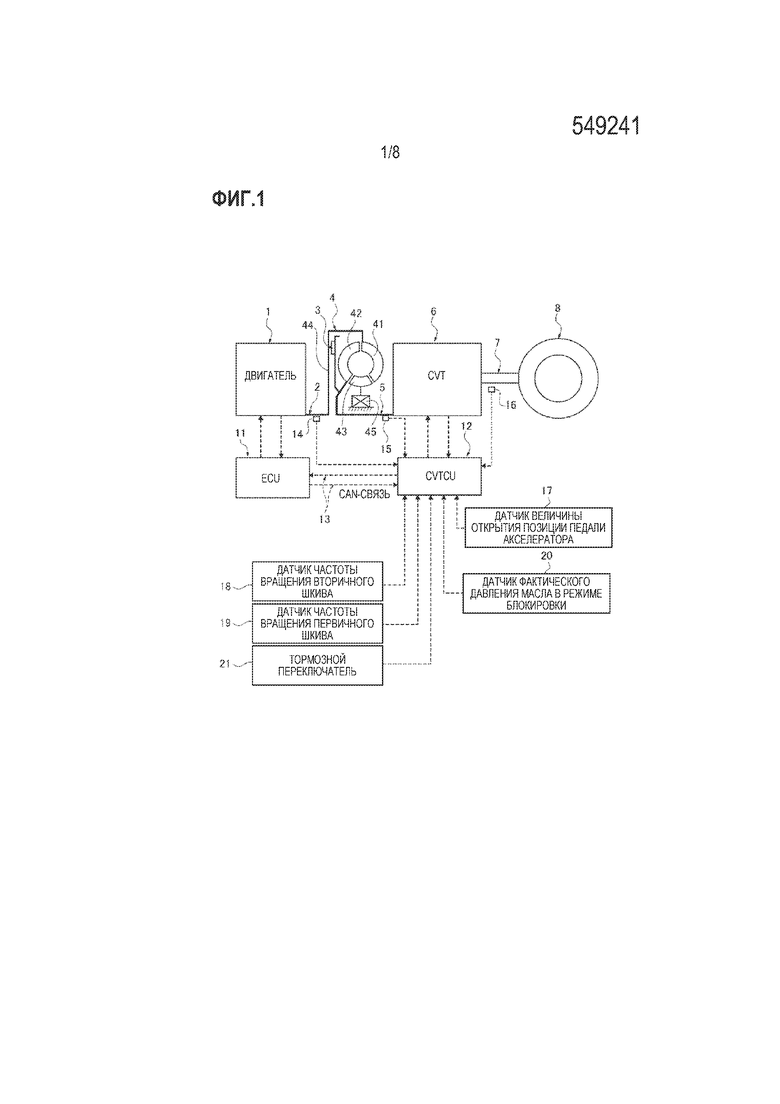
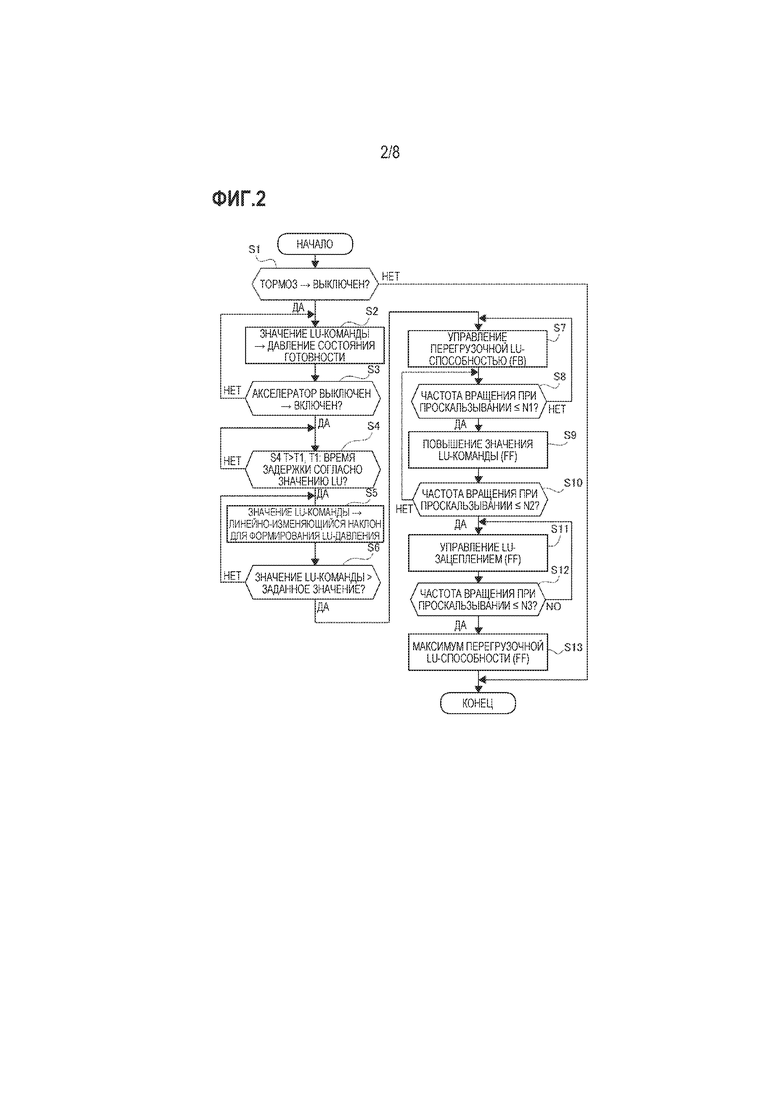
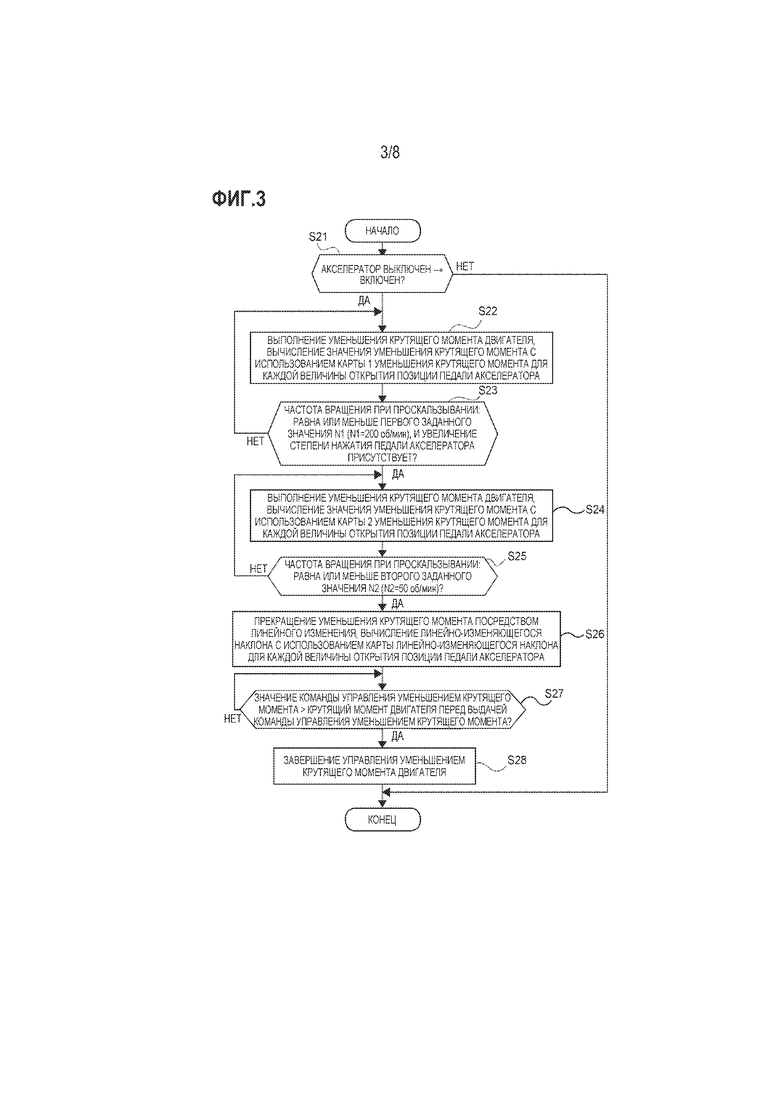
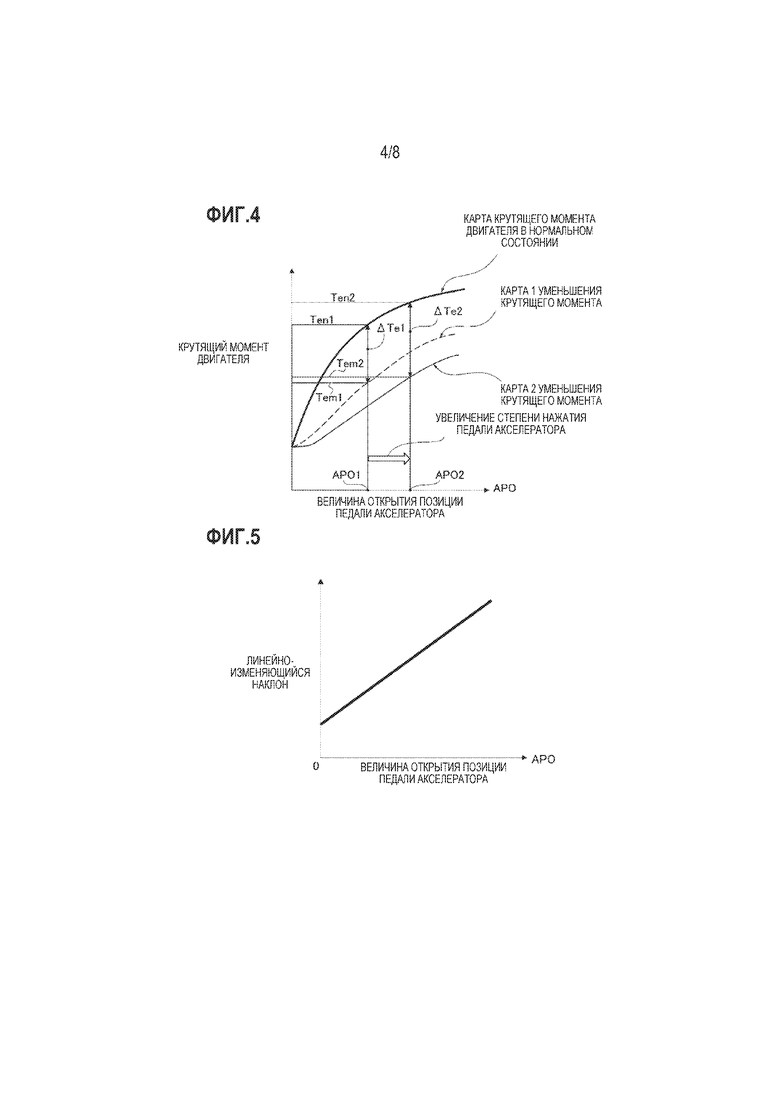
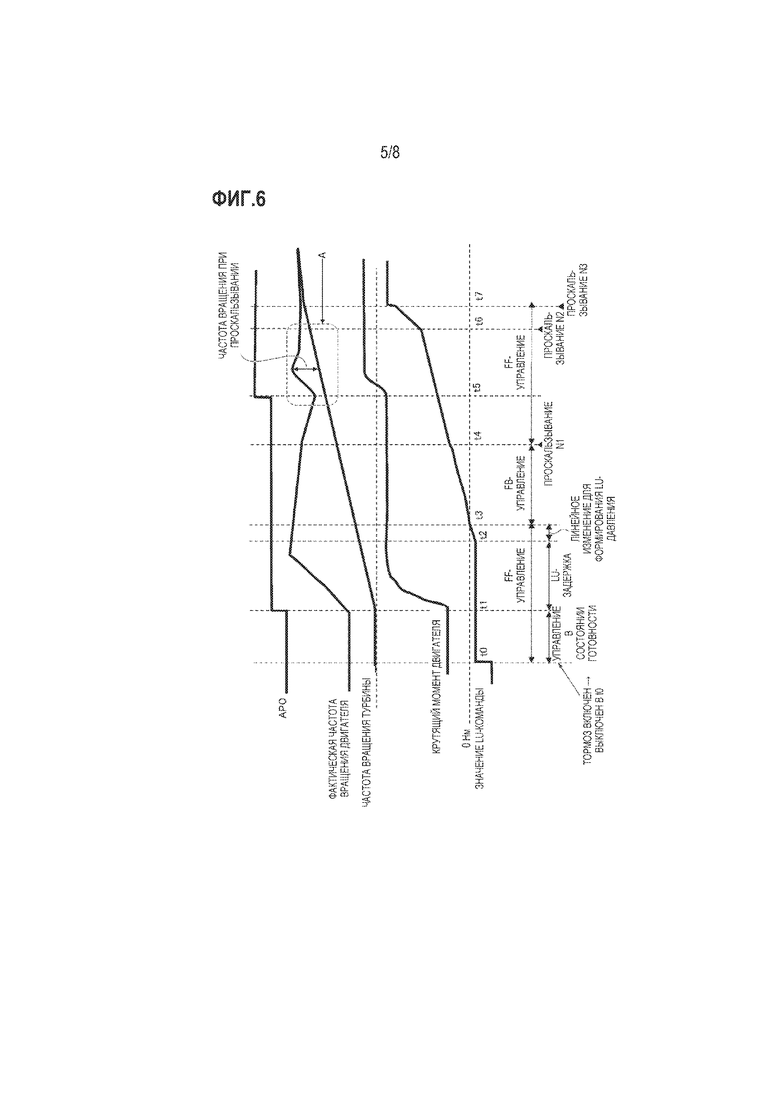
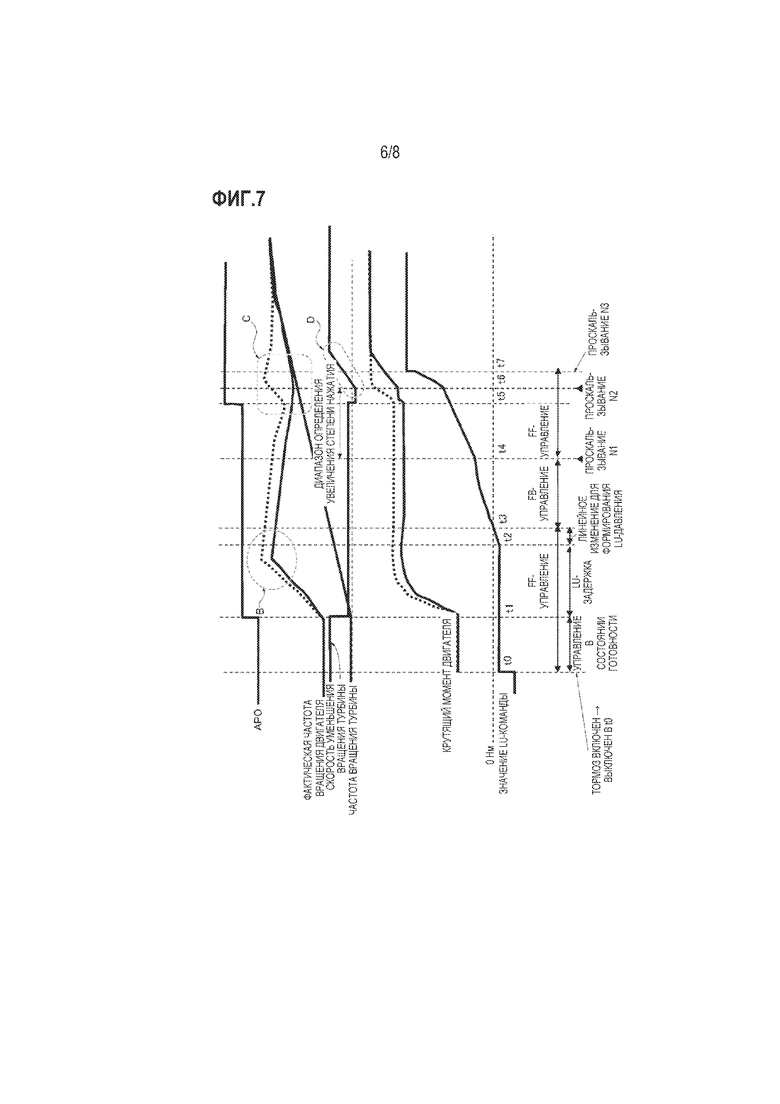
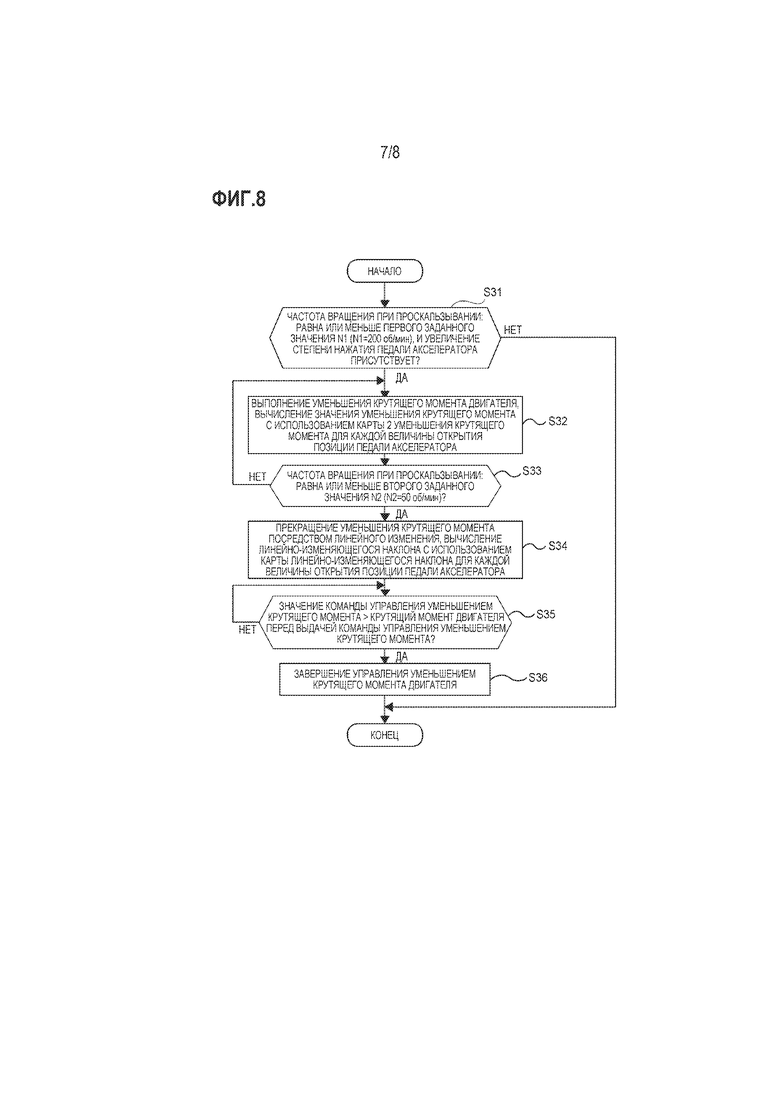
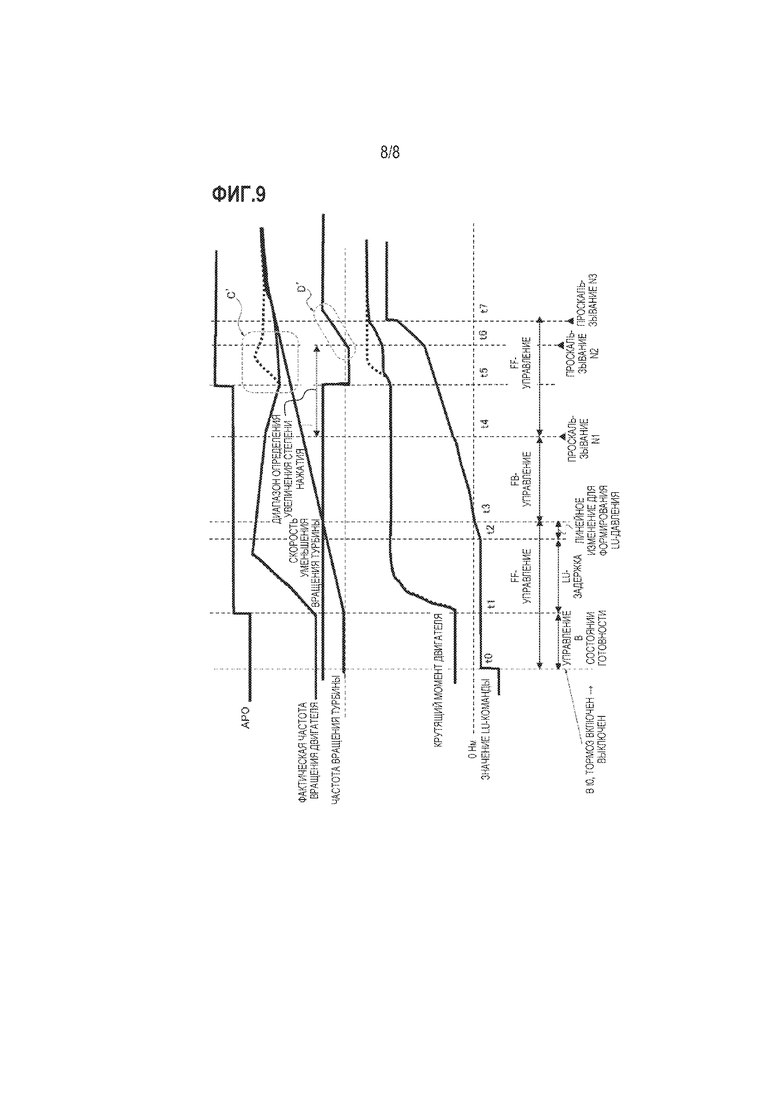
Изобретение относится к трансмиссиям ТС. В способе управления блокирующей муфтой транспортного средства, которая размещена между двигателем и трансмиссией, управляют блокировкой при выдаче запроса на зацепление блокирующей муфты, чтобы зацеплять блокирующую муфту через управление проскальзыванием посредством увеличения перегрузочной способности блокирующей муфты и постепенного уменьшения частоты вращения при проскальзывании, представляющей собой частоту входного/выходного дифференциального вращения блокирующей муфты. Затем уменьшают крутящий момент двигателя во время управления проскальзыванием при управлении блокировкой, которое уменьшает крутящий момент двигателя ниже нормального крутящего момента, который прикладывается в ответ на запрос водителя после того, как частота вращения при проскальзывании достигнет заданного значения или опустится ниже него. Повышается плавность хода. 2 н. и 5 з.п. ф-лы, 9 ил.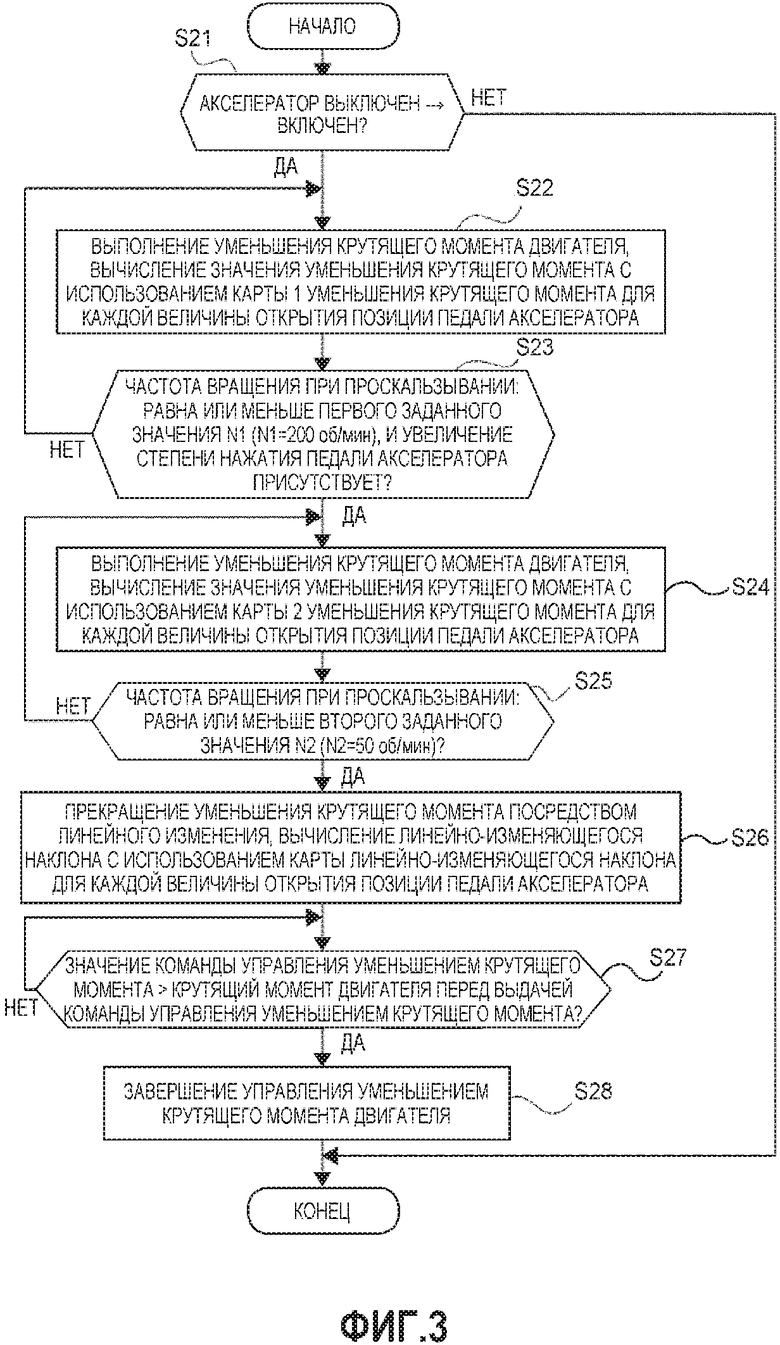
1. Способ управления блокирующей муфтой транспортного средства, имеющего преобразователь крутящего момента с блокирующей муфтой, которая размещена между двигателем и трансмиссией, включающий этапы, на которых:
выполняют управление блокировкой при выдаче запроса на зацепление блокирующей муфты, чтобы зацеплять блокирующую муфту через управление проскальзыванием посредством увеличения перегрузочной способности блокирующей муфты и постепенного уменьшения частоты вращения при проскальзывании, которая представляет собой частоту входного/выходного дифференциального вращения блокирующей муфты, и
выполняют управление уменьшением крутящего момента двигателя во время управления проскальзыванием при управлении блокировкой, которое уменьшает крутящий момент двигателя ниже нормального крутящего момента, который прикладывается в ответ на запрос водителя после того, как частота вращения при проскальзывании достигнет заданного значения или опустится ниже него.
2. Способ управления блокирующей муфтой транспортного средства по п. 1, при котором начальные условия для управления уменьшением крутящего момента двигателя включают в себя частоту вращения при проскальзывании, равную или меньшую заданного значения, и увеличение нажатия педали акселератора.
3. Способ управления блокирующей муфтой транспортного средства по п. 1 или 2, при котором управление уменьшением крутящего момента двигателя завершают при схождении частоты вращения при проскальзывании блокирующей муфты таким образом, что она достигает или опускается ниже частоты вращения для определения зацепления муфты, которая меньше заданного значения при выполнении управления уменьшением крутящего момента двигателя.
4. Способ управления блокирующей муфтой транспортного средства по любому из пп. 1-3, при котором при выполнении управления уменьшением крутящего момента двигателя значение уменьшения крутящего момента двигателя для нормального крутящего момента задают меньшим, когда величина открытия позиции педали акселератора является небольшой, и задают таким образом, что оно становится большим по мере того, как увеличивается величина открытия позиции педали акселератора.
5. Способ управления блокирующей муфтой транспортного средства по любому из пп. 1-4, при котором:
управление блокировкой представляет собой управление блокировкой при начальном движении, выполняемое на основе определения операции трогания с места, и
выполнение управления уменьшением крутящего момента двигателя начинается до того, как частота вращения при проскальзывании достигает или опускается ниже заданного значения вследствие управления блокировкой при начальном движении.
6. Способ управления блокирующей муфтой транспортного средства по п. 5, при котором:
управление уменьшением крутящего момента двигателя включает в себя первое управление уменьшением крутящего момента двигателя и второе управление уменьшением крутящего момента двигателя,
при этом первое управление уменьшением крутящего момента двигателя начинают после определения операции трогания с места, чтобы уменьшать крутящий момент двигателя от нормального крутящего момента, прикладываемого в ответ на запрос водителя с использованием первого значения уменьшения крутящего момента, а
второе управление уменьшением крутящего момента двигателя начинают, когда частота вращения при проскальзывании достигает или опускается ниже заданного значения вследствие управления блокировкой при начальном движении при выполнении первого управления уменьшением крутящего момента двигателя, чтобы изменять значение уменьшения крутящего момента на второе значение уменьшения крутящего момента, которое превышает первое значение уменьшения крутящего момента.
7. Устройство управления блокирующей муфтой транспортного средства, имеющего преобразователь крутящего момента с блокирующей муфтой, которая размещена между двигателем и трансмиссией, содержащее:
модуль управления блокировкой, который при выдаче запроса на зацепление блокирующей муфты зацепляет блокирующую муфту через управление проскальзыванием, которое увеличивает перегрузочную способность блокирующей муфты и постепенно уменьшает частоту вращения при проскальзывании, которая представляет собой частоту входного/выходного дифференциального вращения блокирующей муфты; и
модуль совместного управления, который выполняет совместное управление блокирующей муфтой и двигателем,
причем модуль совместного управления выполнен с возможностью выполнения управления уменьшением крутящего момента двигателя, которое уменьшает крутящий момент двигателя до значения ниже нормального крутящего момента, который прикладывается в ответ на запрос водителя после того, как частота вращения при проскальзывании достигнет заданного значения или опустится ниже него во время управления проскальзыванием модуля управления блокировкой.
| JP 2004138147 A, 13.05.2004 | |||
| JP H07101273 A, 18.04.1995 | |||
| АВТОМАТИЗИРОВАННАЯ МЕХАНИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ И СПОСОБ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ В КОРОБКЕ ПЕРЕДАЧ | 1994 |
|
RU2116895C1 |
| Устройство для измерения поступательного перемещения чувствительных элементов приборов | 1961 |
|
SU147824A1 |

