Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к обнаружению присутствия и отсутствия существа (например, человека или животного) или другого теплого объекта в том смысле, что такой объект излучает тепло. Более конкретно, настоящее изобретение также относится к подсчету, например количества людей на определенном участке, включая, без ограничения, уборные, ванные, туалеты, общественные туалеты и т.п. Настоящее изобретение также относится к регистрации, например, людей с помощью датчика излучения.
Предшествующий уровень техники настоящего изобретения
В предшествующем уровне техники известны различные методы обнаружения присутствия людей и подсчета количества пользователей в конкретном месте. Таким образом, используемые устройства обычно разработаны так, что они игнорируют объекты, не относящиеся к людям, поскольку основной интерес действительно заключается в определении присутствия или отсутствия человека и/или в определении своего рода «подсчета по головам» людей, входящих в комнату, пользующихся услугами заведения, находящихся в некоторой среде и/или проходящих через заданный пункт. То же самое, однако, может относиться к существам в целом или даже к объектам, которые могут выделять тепло, но, по меньшей мере, излучают тепло.
В традиционных методах, например, используется пассивное инфракрасное обнаружение движения с использованием дифференциального пироэлектрического датчика (т.е. пироэлектрические инфракрасные датчики эквивалентны PIR-датчикам) для обнаружения присутствия и/или отсутствия человека. Упомянутые PIR-датчики относительно хорошо обнаруживают присутствие человека, но относительно плохо обнаруживают отсутствие и, как следствие, могут не подходить, если требуется точный подсчет количества людей. Одной из причин этого недостатка является то обстоятельство, что для PIR-датчиков может требоваться движение человека-объекта в первую очередь для обнаружения человека. Однако, если человек не движется или движется незначительно, присутствие и/или отсутствие не может быть надежно обнаружено. В некоторых традиционных подходах используется таймер для определения присутствия. Например, при первом обнаруженном движении таймер запускается, и если второе движение обнаруживается до того, как истечет время таймера, время сбрасывается до своего начального значения, а присутствие сохраняется. Но если до истечения времени таймера движение не обнаружено, определяется отсутствие. Это решение может вызвать две другие проблемы: либо время таймера слишком мало, и один человек, находящийся в поле обзора (FOV), будет определен как несколько человек, либо время таймера слишком велико, и между последующими людьми, входящими в поле обзора, не будет обнаружено отсутствие людей.
Кроме того, существует ряд известных способов, с помощью которых достигается элементарное обнаружение присутствия человека с использованием термоэлектрического датчика. Однако и такие традиционные концепции обладают различными недостатками. Например, одним из известных способов с использованием термоэлектрического датчика является подход с фиксированным порогом, который предусматривает нахождение фиксированного порога по отношению к фоновому излучению. Порог либо является постоянным значением, либо порог определяется по отношению к фоновому излучению в момент, когда пользователь входит в поле обзора датчика. Однако этот подход с фиксированным порогом может не сработать, когда фоновое излучение изменяется в результате, например, солнечного излучения, суточных и/или местных колебаний температуры.
Другой традиционный подход предусматривает измерение общего излучения в используемом диапазоне длин волн, вывод одного или нескольких значений на основе этого уровня излучения и калибровку одного из значений так, чтобы оно соответствовало температуре целевого объекта в поле обзора. Затем необработанное значение может быть отфильтровано с использованием двух фильтров нижних частот, из которых один является слабым и быстрым, другой более сильным и, следовательно, более медленным. Оба эти фильтра могут быть установлены на разные значения, но обычно необработанный вывод быстрее, чем вывод первого фильтра, который, в свою очередь, быстрее, чем вывод второго фильтра. Присутствие затем может быть определено как разница между любыми из этих двух значений, т.е. если более быстрый фильтр отображает более высокое значение, чем более медленный фильтр. Согласно этому способу затем можно определить, что присутствие прекращается, когда происходит обратное, т.е. что значение на выходе более быстрого фильтра меньше, чем значение на выходе более медленного фильтра.
Хотя этот способ может адаптироваться к медленным изменениям из-за дрейфа, этот подход, тем не менее, может обладать недостатком, заключающимся в том, что постоянная времени более медленного фильтра в конечном итоге будет приближаться к более быстрому фильтру, и разница, используемая в качестве основы для принятия решения об определении присутствия/отсутствия, будет становиться все меньше и меньше. Это обстоятельство может привести к очень медленному фильтру, который не достигнет более быстрого отфильтрованного значения во время присутствия, и к относительно быстрому фильтру после завершения присутствия, чтобы быть готовым к следующему пользователю. Следовательно, этот способ может не сработать, если периоды присутствия аналогичны по времени периодам отсутствия, что может быть очень распространенным случаем.
В дополнение к вышесказанному остается еще несколько проблем. Один из них возникает, когда желательно, чтобы датчик обнаружения присутствия обладал относительно широким углом обзора для охвата некоторого заданного участка. Широкое поле обзора может привести к тому, что человек сможет стоять/сидеть на небольшом расстоянии в центре поля обзора (что приводит к сильному сигналу) или по краю поля обзора (что приводит к слабому сигналу). Следовательно, человек может также перемещаться между этими положениями в пределах поля обзора, что может привести к сильным колебаниям сигнала. Другая проблема связана с тем фактом, что корпус датчика может нагреваться от окружающей среды или температуры тела пользователя, а также может снова медленно излучать это тепло при охлаждении. Эта проблема может даже усугубиться, если материалы, прозрачные в инфракрасном (ИК) диапазоне, используются в качестве корпуса датчика или расположены перед датчиком.
Следовательно, существует потребность в улучшенных концепциях обнаружения присутствия и отсутствия и подсчета существ, животных или людей, например людей, заходящих в определенное место, участок, комнату или проходящих мимо заданного пункта. В частности, существует потребность в улучшенных концепциях, в которых используется датчик излучения для генерирования необработанных данных и которые используются для обнаружения присутствия и отсутствия и подсчета.
Краткое раскрытие настоящего изобретения
Указанные проблемы и другие недостатки устраняются с помощью предмета изобретения, изложенного в независимых пунктах формулы изобретения. Дополнительные предпочтительные варианты осуществления изложены в зависимых пунктах формулы изобретения.
Согласно одному варианту осуществления настоящего изобретения предлагается способ обнаружения присутствия и отсутствия существа, способ предусматривает следующие стадии: прием входного сигнала от датчика излучения; применение первого фильтра нижних частот к принятому входному сигналу с первой постоянной времени и генерирование первого выхода фильтра; применение второго фильтра нижних частот к принятому входному сигналу с второй постоянной времени и генерирование второго выхода фильтра; определение присутствия существа или объекта, излучающего тепло, посредством сравнения крутизны среза первого выхода фильтра с предварительно определенным значением; установку первого порогового значения на основании второго выхода фильтра; уменьшение второй постоянной времени; увеличение второй постоянной времени; вычисление разницы между указанным первым пороговым значением и вторым выходом фильтра; корректировку указанного первого порогового значения на основании второго выхода фильтра; и определение отсутствия, когда первый выход фильтра падает ниже указанного первого порогового значения.
Согласно другому варианту осуществления настоящего изобретения предлагается устройство для обнаружения присутствия и отсутствия существа или объекта, излучающего тепло, причем устройство содержит ресурсы обработки, которые выполнены с возможностью приема входного сигнала от датчика излучения; применения первого фильтра нижних частот к принятому входному сигналу с первой постоянной времени и генерирования первого выхода фильтра; применения второго фильтра нижних частот к принятому входному сигналу с второй постоянной времени и генерирования второго выхода фильтра; определения присутствия существа или объекта, излучающего тепло, посредством сравнения крутизны среза первого выхода фильтра с предварительно определенным значением; установки первого порогового значения на основании второго выхода фильтра; уменьшения второй постоянной времени; увеличения второй постоянной времени; вычисления разницы между указанным первым пороговым значением и вторым выходом фильтра; корректировки указанного первого порогового значения на основании второго выхода фильтра; и определения отсутствия, когда первый выход фильтра падает ниже указанного первого порогового значения.
Краткое описание фигур
Варианты осуществления настоящего изобретения, которые представлены для лучшего понимания идей изобретения, но которые не должны рассматриваться как ограничивающие его объем, будут описаны далее со ссылкой на фигуры, на которых:
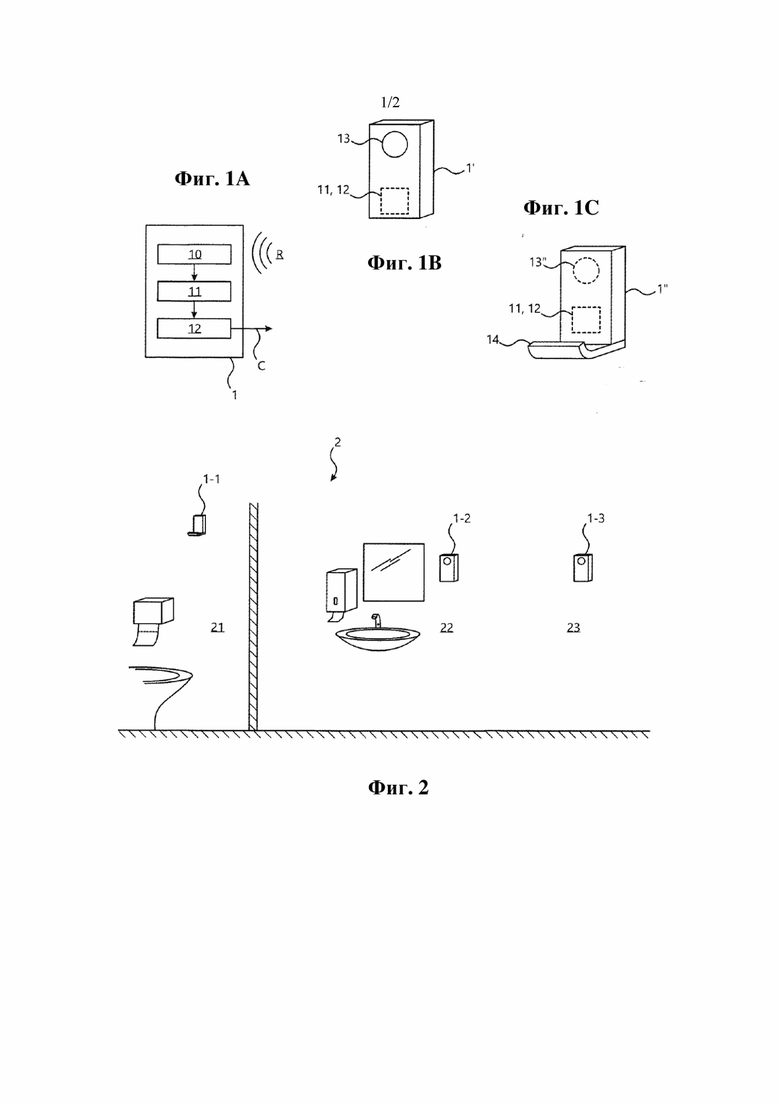
на фиг. 1А показан схематический вид общего варианта осуществления устройства согласно настоящему изобретению;
на фиг. 1В и 1С показаны схематические виды приведенных в качестве примера вариантов осуществления устройства согласно настоящему изобретению;
на фиг. 2 показан схематический вид приведенной в качестве примера рабочей среды согласно варианту осуществления настоящего изобретения;
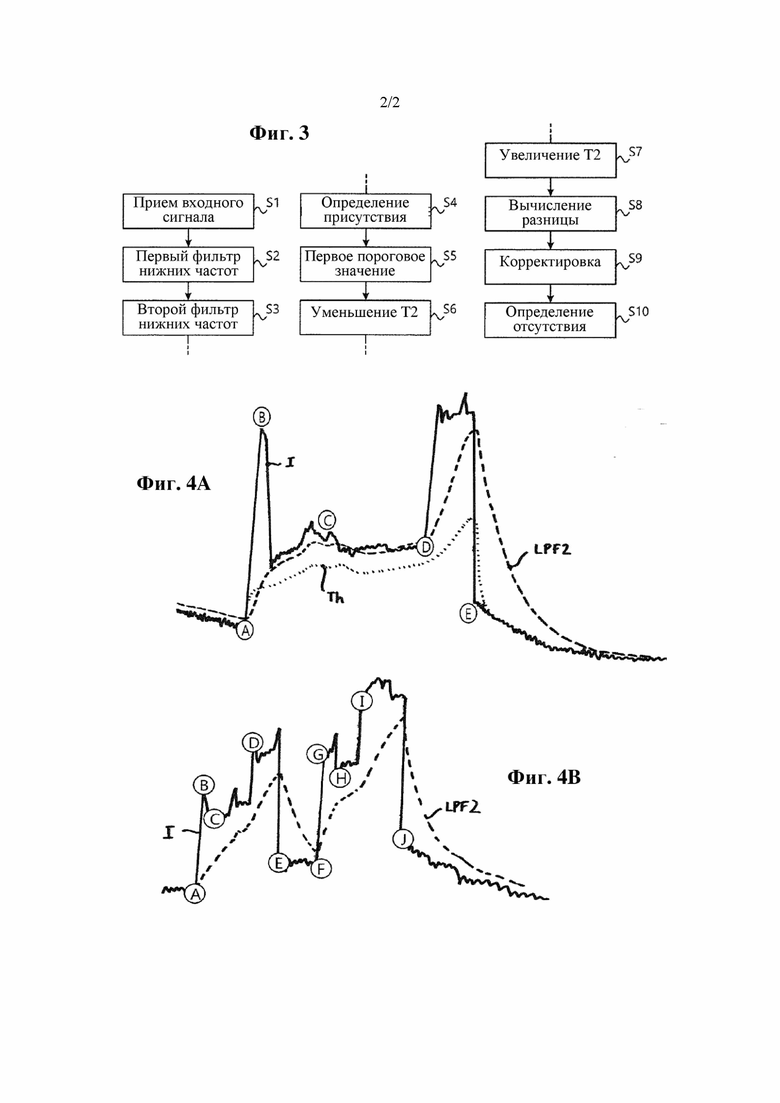
на фиг. 3 показан схематический вид общего варианта осуществления способа согласно настоящему изобретению и
на фиг. 4А и 4В показаны схематические виды возможных значений необработанных и обработанных данных, получаемых в ходе соответствующих вариантов осуществления настоящего изобретения.
Подробное раскрытие настоящего изобретения
На фиг. 1А показан схематический вид общего варианта осуществления устройства согласно настоящему изобретению. В частности, схематически показано устройство 1 для обнаружения присутствия и отсутствия существа, которое содержит датчик 10 излучения, выполненный с возможностью приема и обнаружения излучения R от существа или целевого объекта. Датчик 1 излучения может представлять собой любой из инфракрасного датчика, термоэлектрического датчика, камеры, оптического датчика и температурного датчика. В целом, датчик 1 излучения выполнен с возможностью обнаружения тепла от существа, которое передается в результате (инфракрасного) теплового излучения и которое практически полностью игнорирует теплопередачу за счет теплопроводности.
Устройство 1 также может содержать блок 11 обработки, который также может содержать или обладать правом доступа к ячейке запоминающего устройства, в которой хранится код в виде инструкций, исполняемых указанным блоком 11 обработки. Таким образом, блок 11 обработки может реализовывать желаемые функции, включающие прием входного сигнала от датчика излучения, применение первого фильтра нижних частот к принятому входному сигналу с первой постоянной времени и генерирование первого выхода фильтра, применение второго фильтра нижних частот к принятому входному сигналу с второй постоянной времени и генерирование второго выхода фильтра; определение присутствия существа посредством сравнения крутизны среза первого выхода фильтра с предварительно определенным значением, установку первого порогового значения на основании второго выхода фильтра, уменьшение второй постоянной времени, увеличение второй постоянной времени, вычисление разницы между указанным первым пороговым значением и вторым выходом фильтра, корректировку указанного первого порогового значения на основании второго выхода фильтра и определение отсутствия, когда первый выход фильтра падает ниже указанного первого порогового значения.
Устройство 1 может дополнительно содержать блок 12 связи, который выполнен с возможностью приема ввода от блока 11 обработки и генерирования и передачи связного сигнала С на некоторый принимающий объект. Например, блок 11 обработки может генерировать данные в зависимости от определенного присутствия, отсутствия и/или подсчета событий, что, в свою очередь, побуждает блок 12 связи генерировать и передавать соответствующий сигнал. Таким образом, информация может быть предоставлена на другие объекты на основании результатов определения, полученных в устройстве 1.
В вышеописанном варианте осуществления все эти функции реализуются локально в устройстве 1. Однако согласно другому варианту осуществления настоящего изобретения некоторые из вышеупомянутых функций могут быть реализованы вне устройства 1, например, на удаленном компьютере (сервере, хосте) или ресурсе обработки с доступом к сети, Интернету и/или облачному сервису. С этой целью блок 11 обработки может только способствовать генерированию информационных сообщений, которые блок 12 связи затем может передавать на такой удаленный пункт, на котором затем реализуются оставшиеся функции.
На фиг. 1В и 1С показаны схематические виды приведенных в качестве примера вариантов осуществления устройства согласно настоящему изобретению. Как схематически показано на фиг. 1В, вариант осуществления устройства может предусматривать одно устройство 1' с корпусом и излучающей апертурой 13, через которую излучение от целевого объекта может достичь датчика, встроенного в устройство 1'. Устройство 1', опять-таки, может содержать блок 11 обработки и блок 12 связи, которые реализуют некоторые или все функции и связанную передачу данных и сигналов. На фиг. 1С показан вариант осуществления устройства, в котором устройство 1'' объединяет функции согласно общим вариантам осуществления настоящего изобретения с дополнительной, и, таким образом, независимой функцией. Например, устройство 1' содержит крюковой элемент 14, который позволяет использовать устройство 1'' в качестве крючка. Кроме того, апертура 13'' может быть скрытой, чтобы слишком не влиять на конструкцию, обладающую другими функциями.
На фиг. 2 показан схематический вид приведенной в качестве примера рабочей среды согласно варианту осуществления настоящего изобретения. В качестве примера показана обстановка 2 уборной, которая, как обычно, включает область 21 туалетной кабинки, область 22 для мытья рук и область 23 общего назначения. Естественно, предполагаемые обстановки могут обладать аналогичной конфигурацией или могут предусматривать только одну или две из вышеупомянутых областей. Однако в показанной в качестве примера обстановке расположено три устройства 1-1, 1-2 и 1-3 для обнаружения присутствия и отсутствия существа согласно соответствующим вариантам осуществления настоящего изобретения. Как показано, первое устройство 1-1 расположено в области 21 туалетной кабинки и связано с ней, второе устройство 1-2 расположено в области 22 для мытья рук и связано с ней и третье устройство 1-3 расположено в области 23 общего назначения и связано с ней.
Согласно варианту осуществления предлагается первое устройство 1-1 вместе с вариантом осуществления, описанным со ссылкой на фиг. 1С, а именно, в качестве крюка. Таким образом, устройство 1-1 может использоваться в ограниченном пространстве, обычно имеющемся в соответствующих областях, и может выполнять другие задачи, например, на него можно повесить одежду, сумки и т.д. посетителя (человека) заведения. Устройство 1-1 может быть установлено для контроля времени, событий и/или подсчета, связанных с использованием туалета в области 21. Таким образом, данные, относящиеся подсчету количества использований и/или шаблонам использования, могут быть сгенерированы на основе определенного присутствия и отсутствия. Например, можно сделать выводы о необходимости обслуживания заведения, например, о пополнении расходных материалов (салфеток, туалетной бумаги, дезинфицирующих средств, дезодорантов, предметов гигиены и т.д.) и/или очистке заведений. Аналогичные причины применимы к устройству 1-2, которое расположено в области 22 для мытья рук.
Дополнительное устройство 1-3, которое установлено и расположено в области 23, может быть предназначено для получения дополнительной информации. В частности, устройство 1-3 может быть расположено рядом с дверью или проходом комнату 2. Таким образом, можно осуществить подсчет общего количества людей, которые входят, покидают или пользуются услугами заведений. Кроме того, устройство 1-3 также может быть расположено в месте, которое подходит для обнаружения людей, стоящих в очереди. В частности, устройство 1-3 может быть выполнено с возможностью определения и/или подсчета количества людей, которым нужно войти и воспользоваться услугами в области 21 туалета и/или области 22 для мытья рук. Соответствующие данные могут использоваться, чтобы направить людей в другие уборные, и/или чтобы составить план на ресурсы, расходные материалы и/или обслуживание.
На фиг. 3 показан схематический вид возможных значений необработанных и обработанных данных в варианте осуществления настоящего изобретения. Этот вариант осуществления способа предназначен для обнаружения присутствия и отсутствия существа или теплого объекта и предусматривает следующие стадии: стадию S1 приема входного сигнала от датчика излучения; стадию S2 применения первого фильтра нижних частот к принятому входному сигналу с первой постоянной времени и генерирования первого выхода фильтра; стадию S3 применения второго фильтра нижних частот к принятому входному сигналу с второй постоянной времени и генерирования второго выхода фильтра; стадию S4 определения присутствия человека посредством сравнения крутизны среза первого выхода фильтра с предварительно определенным значением; стадию S5 установки первого порогового значения на основании второго выхода фильтра; стадию S6 уменьшения второй постоянной времени; стадию S7 увеличения второй постоянной времени; стадию S8 вычисления разницы между указанным первым пороговым значением и вторым выходом фильтра; стадию S9 корректировки указанного первого порогового значения на основании второго выхода фильтра; и стадию S10 определения отсутствия, когда первый выход фильтра падает ниже указанного первого порогового значения.
В целом, следует понимать, что некоторые из вышеупомянутых стадий выполняются одновременно и/или в другом порядке. Например, стадии S2 и S3 могут быть выполнены в другом порядке или также одновременно, т.е. в одно и то же время, с другими стадиями общего варианта осуществления способа. В частности, стадии S2 и S3 фильтрации могут быть реализованы как программы фильтрации, исполняемые непрерывно, при этом, например, на стадии S6 и/или S7 уменьшают или увеличивают постоянную времени Т2 второго фильтра S3. Кроме того, может быть предусмотрена одна или несколько необязательных стадий, таких как стадия ожидания в течение предварительно определенного времени после стадии S6 уменьшения второй постоянной времени и/или стадия ожидания, пока второй выход фильтра станет равным первому выходу фильтра в пределах предварительно определенного допуска, после стадии S6. Однако, в целом, характерного времени, которое требуется блоку обработки для исполнения стадий S6 и S7, может быть достаточно для того, чтобы второй выход фильтра стал равным первому выходу фильтра в пределах предварительно определенного допуска.
В целом, термоэлектрические датчики, которые используются в качестве датчика (например, датчика 10, показанного и описанного со ссылкой на фиг. 1А), могут быть преимущественными в том, что для обнаружения присутствия людей не требуется обнаружения движения, поскольку эти датчики измеряют излучение в поле обзора датчика с использованием, например, соответствующего инфракрасного диапазона длин волн на частоте приблизительно 8 14 мкм (известные датчики включают, например, термоэлектрические компоненты «CaliPile TPiS IS 1385» и «TPiS IT 1086 L5.5» от Excelitas, может применяться соответствующий товарный знак (ТМ) и смежные права). Такие датчики могут характеризоваться широким полем обзора, составляющим приблизительно 120°, и могут использоваться в первую очередь для обнаружения присутствия в относительно небольших помещениях, в то время как другие типы датчиков содержат фокусирующую линзу, благодаря которой поле обзора находится в диапазоне 5,5°.
На фиг. 4А и 4В показаны схематические виды возможных значений необработанных и обработанных данных, получаемых в ходе соответствующего варианта осуществления настоящего изобретения. В частности, амплитуда (в произвольных единицах в вертикальном направлении) необработанных выходных данных от датчика и некоторых обработанных данных отображается в зависимости от времени в горизонтальном направлении (например, за промежуток времени, равный 30 секундам за изображенный период). Далее раскрываются и описываются дополнительные подробные варианты осуществления предоставленных функций, причем следует понимать, что любая ссылка на конкретную, но приведенную в качестве примера, форму и свойства соответствующих значений данных служит только для иллюстративных, но не ограничивающих целей. Специалисту в данной области техники будет очевидно, что показанные фактические значения данных зависят от конкретного варианта использования и, конечно, будут меняться во время работы, в то время как функциональные возможности вариантов осуществления настоящего изобретения предусматривают обработку данных соответствующим образом.
В общем, в вариантах осуществления настоящего изобретения предложено решение, позволяющее справляться как с медленным дрейфом, так и с быстрым откликом на взаимодействие с пользователем, т.е. присутствие и отсутствие людей. Первоначально можно предположить, что система запускается в некотором состоянии ожидания, при этом все сигналы и значения находятся в некотором состоянии по умолчанию. Однако, когда человек входит в поле обзора используемого датчика и это обнаруживается, например, путем выполнения стадий S1-S4, как описано со ссылкой на фиг. 3, и рассмотрения приведенного в качестве примера необработанного входного сигнала I (сплошная линия) от датчика излучения, а также выхода первого фильтра нижних частот LPF1 (на фигуре не показан, так как он следует сразу за I). Это обычно также реализует вид обнаружения движения, который может быть более быстрым и более чувствительным к быстрым изменениям, и который может быть основан на крутизне среза первого выхода фильтра LPF1, который может быть сгенерирован с использованием относительно быстрого отклика, т.е. относительно небольшой постоянной времени Т1. Быстрый выход фильтра может привести к зашумлению сигнала, но закрывающая линза перед датчиком может сама работать как фильтр нижних частот из-за затухания, вызванного материалом. Таким образом, обычно предлагается снабдить устройство линзой перед датчиком излучения, при этом линза отфильтровывает быстрые колебания, т.е. также действует как своего рода фильтр нижних частот в зависимости от свойств материала линзы и толщины.
Как только это присутствие обнаруживается и определяется, обработка переходит к следующей стадии, которая может выполняться локально или извне по отношению к датчику и/или устройству (например, хосту). Для этого может быть выполнено прерывание и/или установлен флаг присутствия. Затем на основе сигнала LPF2 находят пороговый уровень Th, к которому необязательно добавляется постоянное или иным образом предварительно определенное смещение. В это время сигнал LPF2 может быть подвергнут фильтрации медленнее, чем сигнал LPF1.
Постоянная времени Т2 сигнала LPF2 может быть установлена на относительно быстрый отклик, что позволяет ей достичь уровня LPF1 за короткий период времени (например <2 с) в пределах некоторого заданного допуска. Это может быть достигнуто за счет первоначального уменьшения с последующим увеличением второй постоянной времени Т2 для второго фильтра нижних частот, как описано со ссылкой на стадии S6 и S7 на фиг. 3. В подходе с использованием значений фильтра обработка может не полностью удовлетворять требованиям обслуживания мощности. Преимущественно это может учитывать ситуации, в которых сигнал зашумлен. Сразу после стабилизации сигнала LPF2 (например, он может находиться в пределах предварительно определенного диапазона допуска), постоянная времени Т2 снова возвращается к более медленному отклику, т.е. Т2 увеличивается. Это позволяет фильтру LPF2 отфильтровывать шум и некоторые быстрые движения человека.
Теперь можно считать уровень LPF2 и записать разницу с найденным ранее начальным пороговым значением. Эту разницу можно использовать в качестве эталонного значения для разницы между фактически предполагаемым присутствием человека и фоном. Можно рассматривать постоянное смещение, и даже если пороговое значение увеличивается из-за дрейфа (см. также ниже), разница с начальным пороговым значением может использоваться в качестве эталонного значения.
Поскольку к этому моменту способ находится в состоянии, в котором предполагается присутствие человека, начинается следующая часть способа. В частности, пороговое значение можно динамически корректировать в зависимости от дрейфа и действий пользователя. В частности, LPF2 используется как индикатор дрейфа сигнала, и пороговое значение Th корректируется соответствующим образом. В соответствии с дополнительными вариантами осуществления это может дополнительно включать установку порогового значения не ниже, чем начальное пороговое значение, найденное в первую очередь (см. выше), и/или ограничение порогового значения, чтобы оно не увеличивалось со скоростью выше, чем это возможно из-за дрейфа, вызванного окружающей средой (определяется как количество подсчетов в секунду). Например, если человек стоит очень близко к датчику, сигнал LPF2 будет быстро увеличиваться, но это быстрое увеличение не нужно переносить на пороговое значение. Этот предел скорости увеличения порогового значения может быть определен эмпирически и/или экспериментально и может до некоторой степени учитывать материал и корпус устройства.
Затем уровень сигнала LPF1 сравнивается с динамическим пороговым значением, и, если значение опускается ниже порогового значения, считается, что присутствие завершено (т.е. определяется отсутствие, см. стадию S10). Проверка того, находится ли LPF1 ниже динамического порогового значения Th, и обновление динамического порогового значения могут выполняться с различными (и в некоторой степени случайными или периодическими) интервалами, которые могут определяться рядом различных действий, таких как прерывания, возникающие из-за сильных изменений сигналов, действия остальных частей системы для активизации, например, инициирование радиосвязи, таймер, который максимально увеличивает цикл ожидания до, например, 8 секунд, что означает, что если одно из других упомянутых событий не произойдет в течение некоторого времени, таймер обеспечит проверку значений через некоторый минимальный интервал.
Как только определено, что критерии присутствия больше не выполняются, постоянная времени Т2 второго фильтра нижних частот (LPF2) может быть снова установлена на относительно быстрый (например, самый быстрый) отклик, чтобы вернуться в состояние ожидания как можно быстрее (например, <2 с). Сразу после стабилизации LPF2 в пределах заданного диапазона допуска, он возвращается к относительно медленному отклику, и все остальные параметры могут быть возвращены к значениям по умолчанию, и система может быть переведена в спящий режим/режим ожидания в ожидании следующего прерывания. Как правило, устройство и/или задействованные блоки могут быть переведены в спящий режим/режим ожидания между любыми применимыми стадиями для экономии энергии. Последнее может быть ограниченным ресурсом, учитывая, что фактические устройства (например, 1, 1' или 1'', как показано со ссылкой на фиг. 1А-С, могут получать питание от батареи или могут получать свое рабочее питание от солнечных элементов или других устройств сбора энергии.
На фиг. 4А и 4В показаны схематические виды возможных значений необработанных и обработанных данных, получаемых в ходе соответствующих вариантов осуществления настоящего изобретения. В целом, данные, показанные на фиг. 4А, представляют собой типичную пользовательскую историю, когда пользователь (человек) входит в поле обзора датчика и посещает приведенную в качестве примера уборную. Конкретные точки на фиг. 4А связаны со следующими событиями: (А) человек входит в поле обзора; (В) человек проходит мимо датчика на близком расстоянии; (С) некоторые действия и движение человека; (D) человек встает (например, моет руки); (Е) человек ушел (т.е. отсутствует).
В частности, когда пользователь (т.е. человек) входит в поле обзора, уже может быть дрейф вниз (скорее всего, из-за недавних действий пользователя), но сигнал все равно реагирует и растет очень быстро, что связано с тем, что пользователь проходит очень близко к датчику на входе. Когда пользователь садится на краю поля обзора датчика, способ может приспособиться к этому и поддерживать состояние «присутствия». Затем пользователь остается в пределах поля обзора, и следует ожидать медленного дрейфа, и способ соответствующим образом скорректирует пороговое значение Th. В данном случае LPF2 является хорошим приближением того, насколько откорректировано пороговое значение, т.е. он может следовать за медленным дрейфом. Когда пользователь встает, можно наблюдать гораздо более сильный сигнал, но в этом случае способ может не корректировать пороговое значение с такой же высокой скоростью. Основная причина этого может заключаться в том, что если пороговое значение слишком высоко, то сигнал может слишком легко упасть ниже повышенного порогового значения. Это означает, что LPF2 может расти намного быстрее, чем динамическое пороговое значение.
Когда пользователь в конечном итоге покидает поле обзора, сигнал опускается ниже порогового значения, и считается, что присутствие завершилось (т.е. наблюдается отсутствие). Следует отметить, что сигнал после присутствия может не вернуться к тому же уровню, что и до того, как пользователь вошел в поле обзора. Однако с этим дрейфом можно справиться с помощью динамического порогового значения. Также следует отметить, что для LPF2 может потребоваться приблизительно минута, чтобы достичь уровня LPF1, который близок к I, но в этом способе постоянная времени изменяется, и LPF2 будет таким же быстрым, как LPF1 для первого крутого спада, но для обоих значений потребуется много времени после этого, чтобы опуститься, из-за рассеивания повышенной температуры передней линзы. Однако система будет готова к новому пользователю, входящему в поле обзора.
Кроме того, разница между LPF2 и пороговым значением может оставаться постоянной, пока LPF2 изменяется медленно. Например, в точке (D), когда пользователь встает и приближается к датчику, сигнал быстро растет. Для общей компенсации таких ситуаций пороговое значение может быть ограничен в повышении, так как увеличение за единицу времени может быть ограничено. Обычно это может использоваться для предотвращения сильных изменений порогового значения, которые могут привести к потере обнаружения присутствия. При сильных падениях, когда, например, пользователь покидает комнату, сигнал становится ниже порогового значения, и затем корректировку порога нельзя продолжать, поскольку присутствие больше не обнаруживается.
Из этого примера ясно, что согласно алгоритму с фиксированным пороговым значением может быть трудно определить, когда второй пользователь входит или уходит, поскольку сигнал значительно сдвинулся вверх в течение периода присутствия предыдущего пользователя. Следует отметить, что накопленный дрейф после второго или следующего пользователя может занять значительное время, например, до трех минут для рассеивания, что может быть слишком долгим по сравнению с ожидаемыми периодами времени в контексте посещения таких заведений, как уборные. Однако предлагаемые варианты осуществления могут определять как присутствие, так и отсутствие пользователя, что имеет особое преимущество в контексте подсчета людей.
На фиг. 4В показан схематический вид возможных значений необработанных и обработанных данных, получаемых в ходе соответствующего варианта осуществления настоящего изобретения. В частности, этот вариант осуществления относится к ситуациям, в которых следующие друг за другом пользователи посещают заведение, например туалет. На фиг. 4В события происходят в следующем порядке: (А) первый пользователь входит в поле зрения; (В) первый пользователь проходит мимо датчика; (С) первый пользователь садится; (D) первый пользователь встает и, например, моет руки; (Е) первый пользователь ушел; (F) второй пользователь входит в поле зрения; (G) второй пользователь стоит рядом с датчиком; (Н) второй пользователь садится; (I) второй пользователь встает; (J) второй пользователь ушел. Показанный сценарий может быть особенно полезен для демонстрации преимуществ, полученных с помощью вариантов осуществления настоящего изобретения, для надежного определения присутствия и отсутствия и, как следствие, надежного подсчета. В частности, систему можно сделать невосприимчивой к истории нагрева (например, между точками (А) и (Е)) и невосприимчивой к действиям, не связанным с изменением состояния присутствия/отсутствия (например, точки (В), (С), (D) и т.д.).
Хотя в приведенном выше описании может конкретно упоминаться человек, лицо, индивидуум и пользователь, описанные варианты осуществления также применяются для обнаружения отсутствия и присутствия и подсчета существ, включая животных, и в целом всех теплых предметов, т.е. объектов, которые могут выделять тепло, и хотя бы излучать тепло. Следовательно, по меньшей мере некоторые варианты осуществления могут использоваться в темноте, а также при свете, например, в случае подсчета диких животных на станции кормления в ночное время, когда животные активны, а тепловые камеры могут быть слишком дорогими и сложными в использовании, в значительной степени.
Кроме того, хотя были описаны подробные варианты осуществления, они служат только для лучшего понимания настоящего изобретения, определенного в независимых пунктах формулы изобретения, и не должны рассматриваться как ограничивающие.
Изобретение относится к способам обнаружения присутствия и отсутствия существа. Технический результат заключается в повышении качества обнаружения теплового объекта на местности. Способ заключается в приеме входного сигнала от датчика излучения; применении первого фильтра нижних частот к принятому входному сигналу с первой постоянной времени и генерировании первого выхода фильтра; применении второго фильтра нижних частот к принятому входному сигналу со второй постоянной времени и генерировании второго выхода фильтра; определении присутствия существа посредством сравнения крутизны среза первого выхода фильтра с предварительно определенным значением; установке первого порогового значения на основании второго выхода фильтра; уменьшении второй постоянной времени; увеличении второй постоянной времени; вычислении разницы между указанным первым пороговым значением и вторым выходом фильтра; корректировке указанного первого порогового значения на основании второго выхода фильтра; и определении отсутствия, когда первый выход фильтра падает ниже указанного первого порогового значения. 3 н. и 12 з.п. ф-лы, 7 ил.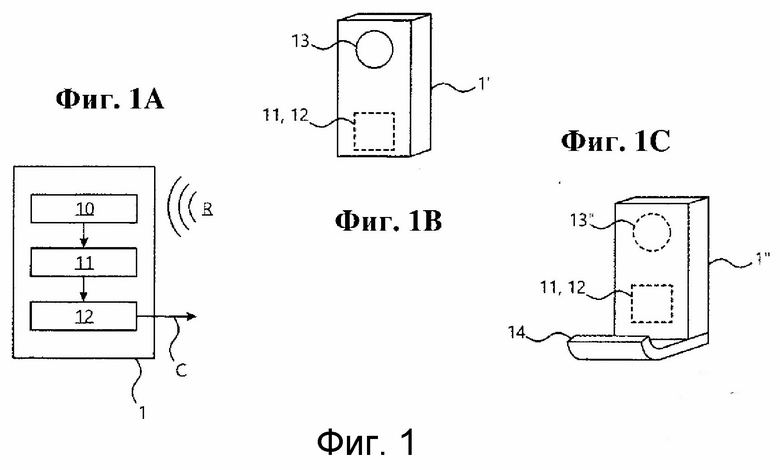
1. Способ обнаружения присутствия и отсутствия существа, причем способ предусматривает следующие стадии:
- прием входного сигнала от датчика излучения;
- применение первого фильтра нижних частот к принятому входному сигналу с первой постоянной времени и генерирование первого выхода фильтра;
- применение второго фильтра нижних частот к принятому входному сигналу со второй постоянной времени и генерирование второго выхода фильтра;
- определение присутствия существа посредством сравнения крутизны среза первого выхода фильтра с предварительно определенным значением;
- установка первого порогового значения на основании второго выхода фильтра;
- уменьшение второй постоянной времени;
- увеличение второй постоянной времени;
- вычисление разницы между указанным первым пороговым значением и вторым выходом фильтра;
- корректировка указанного первого порогового значения на основании второго выхода фильтра; и
- определение отсутствия, когда первый выход фильтра падает ниже указанного первого порогового значения.
2. Способ по п. 1, в котором присутствие определяют посредством сравнения указанной крутизны среза первого выхода фильтра с суммой второго выхода фильтра и предварительно определенного смещения.
3. Способ по п. 1 или 2, дополнительно предусматривающий после стадии уменьшения второй постоянной времени стадию ожидания в течение предварительно определенного времени.
4. Способ по п. 1 или 2, дополнительно предусматривающий после стадии уменьшения второй постоянной времени стадию ожидания, пока второй выход фильтра не станет равным первому выходу фильтра в пределах предварительно определенного допуска.
5. Способ по любому из пп. 1-4, в котором указанная стадия корректировки указанного первого порогового значения на основании второго выхода фильтра предназначена для того, чтобы указанный первый выход фильтра соответствовал указанному второму выходу фильтра в пределах предварительно определенного допуска.
6. Способ по любому из пп. 1-5, в котором стадия корректировки указанного первого порогового значения на основании второго выхода фильтра предусматривает ограничение порогового значения максимальным значением.
7. Способ по любому из пп. 1-6, в котором стадия определения присутствия предусматривает определение начала присутствия существа.
8. Способ по любому из пп. 1-7, в котором стадия определения отсутствия предусматривает определение завершения присутствия существа.
9. Способ по любому из пп. 1-8, дополнительно предусматривающий стадию подсчета существ посредством учета одного или нескольких определенных случаев присутствия и/или одного или нескольких определенных случаев отсутствия.
10. Устройство для обнаружения присутствия и отсутствия существа, причем устройство содержит ресурсы обработки, выполненные с возможностью:
- приема входного сигнала от датчика излучения;
- применения первого фильтра нижних частот к принятому входному сигналу с первой постоянной времени и генерирования первого выхода фильтра;
- применения второго фильтра нижних частот к принятому входному сигналу со второй постоянной времени и генерирования второго выхода фильтра;
- определения присутствия существа посредством сравнения крутизны среза первого выхода фильтра с предварительно определенным значением;
- установки первого порогового значения на основании второго выхода фильтра;
- уменьшения второй постоянной времени;
- увеличения второй постоянной времени;
- вычисления разницы между указанным первым пороговым значением и вторым выходом фильтра;
- корректировки указанного первого порогового значения на основании второго выхода фильтра; и
- определения отсутствия, когда первый выход фильтра падает ниже указанного первого порогового значения.
11. Устройство по п. 10, в котором указанный датчик излучения представляет собой любой из инфракрасного датчика, термоэлектрического датчика, камеры, оптического датчика и температурного датчика.
12. Устройство по п. 10 или 11, в котором указанный датчик излучения представляет собой термоэлектрический датчик с полем обзора 5° и ниже.
13. Устройство по любому из пп. 10-12, в котором указанные ресурсы обработки выполнены с возможностью выполнения способа по любому из пп. 2-9.
14. Устройство по любому из пп. 10-13, дополнительно содержащее указанный датчик излучения.
15. Система, содержащая устройство по любому из пп. 10-13 и указанный датчик излучения.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| EP 3287755 A1, 28.02.2018 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

