Изобретение относится к способу и устройству для автоматической установки усиления в контурах управления, используемых, например, в устройствах воспроизведения на компакт-дисках или на цифровых видеодисках, для фокусировки сканирующего или записывающего светового или лазерного луча на носителе оптической записи или для отслеживания дорожки с записанной информацией.
Для настройки усиления в контуре управления известной практикой является наложение синусоидального сигнала на опорный переменный сигнал и сравнение регулируемой переменной с разностным сигналом контура управления для получения в результате этого сравнения критерия для установки управляемого усиления (см., например, DE-A 3635859). Для этой цели предпочтительно сравнивать между собой амплитуды регулируемой переменной и разностного сигнала контура управления. Кроме того, упоминалось об измерении запаса по фазе и использовании этого измерения для получения критерия для установки усиления в контуре управления. При сравнении амплитуд используют синхронные выпрямители для отфильтровывания тех составляющих колебаний разностного сигнала контура управления и регулируемой переменной, частоты которых равны входной частоте. При использовании блока управления усиление, обеспечиваемое блоком управления, изменяется до тех пор, пока компаратор не установит, что отфильтрованные составляющие регулируемой переменной и разностного сигнала контура управления равны по величие. Поэтому известный способ является интерактивным, требующим для своей реализации значительного времени, следовательно, характеризуется низким быстродействием ввиду используемой поэтапной настройки. Оценка фазовой информации требует высокой степени сложности и занимает значительное время ввиду использования поэтапной настройки. Сокращение числа этапов сравнения неизбежно ведет к снижению точности. При сравнении амплитуд регулируемой переменной и разностного сигнала контура управления следует принимать меры к обеспечению того, что регулируемое усиление устанавливается не точно, поскольку составляющие колебаний не совпадают по фазе с входной частотой регулируемой переменной и разностного сигнала контура управления. Кроме того, использование частоты, отличной от критической частоты, предполагает, что усиление контура управления на этой частоте известно.
Задачей изобретения является создание способа и устройства для автоматической установки усиления в контурах управления, обеспечивающих быструю, но надежную процедуру установки и/или настройки.
Указанный результат обеспечивается признаками, указанными в независимых пунктах формулы изобретения. Предпочтительные варианты осуществления охарактеризованы в зависимых пунктах формулы изобретения.
В одном из аспектов изобретение предусматривает ускорение процедуры настройки при автоматической установке усиления. Для этого конечное значение настройки устанавливается посредством единственного измерения и последующего вычисления. Поэтому больше не существует необходимости в последовательной аппроксимации к значению настройки, что обеспечивает осуществление настройки с более высоким быстродействием. С использованием только одного этапа измеряется существующий коэффициент усиления при вводе сигнала настройки, вычисляется изменение, которое должно быть осуществлено для получения требуемого значения, и устанавливается требуемое значение усиления. Используемый сигнал настройки или частота настройки предпочтительно представляет собой частоту синусоидального шумового сигнала, которая равна частоте, при которой кривая абсолютного значения для усиления разомкнутого контура управления пересекает линию 0 дБ. Частота синусоидального шумового сигнала добавляется, например, к переменной регулирования контура управления.
Значение формируемого действующего усиления или действующего коэффициента усиления представляет собой отношение амплитуд переменной регулирования и разностного сигнала контура управления. Во избежание недостатков, связанных с наличием запаса по фазе между переменной регулирования и разностным сигналом контура управления, амплитуды переменной регулирования и разностного сигнала контура управления формируются из сигнала переменной регулирования и разностного сигнала контура управления соответственно, причем соответствующий сигнал подвергается полосовой фильтрации, возведению в квадрат, низкочастотной фильтрации и извлечению квадратного корня.
С использованием полосовой фильтрации частота настройки отфильтровывается из переменной регулирования и разностного сигнала контура управления. Возведение в квадрат сигналов обеспечивает формирование сигнала, который независим от знака, а низкочастотная фильтрация используется для формирования среднего значения возведенного в квадрат сигнала частоты настройки, из которого определяется амплитуда путем вычислений с использованием операций умножения и извлечения квадратного корня. Сформированные таким путем сигналы амплитуд, например, переменной регулирования и разностного сигнала контура управления представляют действующий коэффициент усиления, определенный как отношение амплитуд переменной регулирования и разностного сигнала контура управления. Требуемое усиление, например 1 дБ или 0 дБ, затем устанавливается с использованием обратной величины по отношению к измеренному коэффициенту усиления. Для этой цели в контуре управления предусмотрено средство установки усиления, образованное, например, умножителем. Оно используется для установки усиления на требуемое значение за один лишь этап осуществления способа. Так как кривая абсолютных значений усиления примерно линейна в диапазоне частоты настройки, коэффициенты усиления, которые отличаются от значения 1, могут быть установлены, таким образом, с высокой степенью точности. Причина этого состоит в том, что частотно-зависимое нарастание усиления определяется из отношения амплитуд переменной регулирования и разностного сигнала контура управления. Поскольку эта величина представляет собой измеренное действующее усиление, то процедура настройки характеризуется высоким уровнем надежности по сравнению с решениями, которые предусматривали изменение усиления с использованием, например, таблиц, полученных с помощью модели.
Однако помимо описанного выше варианта осуществления, который использует переменную регулирования и разностный сигнал контура управления для измерения усиления, также возможно реализовать другие варианты осуществления, которые используют другие точки соединения в контуре управления для измерения усиления.
В данном случае также необходимо учесть конкретные особенности, связанные с выбором точек соединения для измерений усиления. Если, например, для измерения усиления используются входной шумовой сигнал и разностный сигнал контура управления, такое измерение будет иметь сдвиг 6 дБ, но в принципе не будет отличаться от вышеописанного решения. Но в этом случае смещение 6 дБ следует принять во внимание при оценке измеренного значения усиления. В данном аспекте заявленный способ автоматической установки усиления в контуре управления относительно независим от выбора точек соединения для осуществления измерения усиления.
Для обеспечения условия, при котором действующий коэффициент усиления определяется в линейном диапазоне характеристической кривой усиления, проводится дополнительная проверка для установления того, равно ли отношение амплитуд переменной регулирования и разностного сигнала контура управления величине меньшей, чем 1. Если это не имеет места, то другой аспект изобретения предусматривает, что для усиления, которое должно быть установлено на меньшее значение, перед выполнением измерений используется коэффициент меньше 1, предпочтительно 0,75.
Изобретение поясняется ниже на примерах его осуществления со ссылками на чертежи, на которых показано следующее:
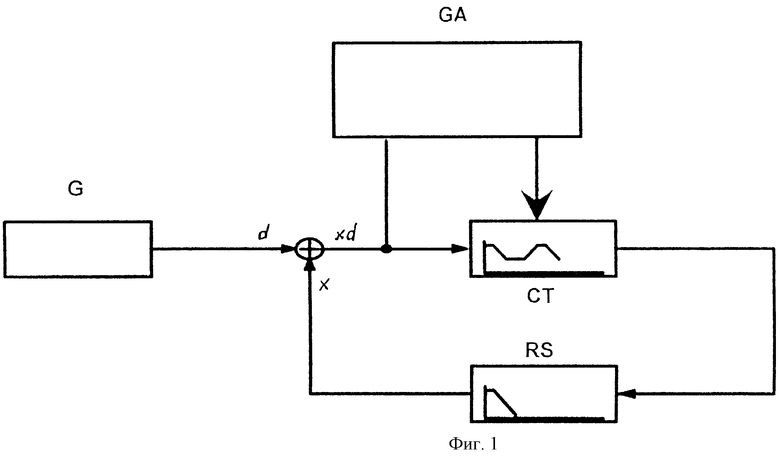
Фиг.1 - схематичная иллюстрация процедуры автоматической установки усиления,
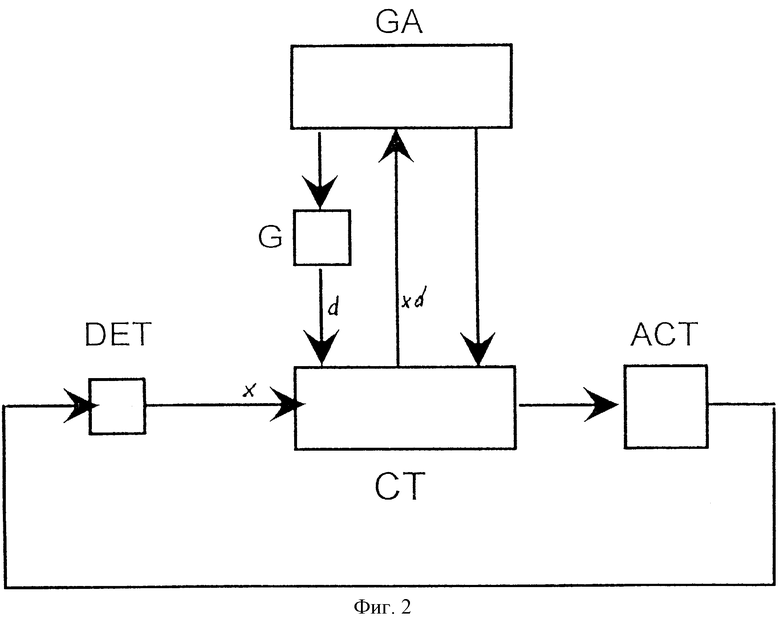
Фиг.2 - схематичная иллюстрация процедуры автоматической установки усиления с использованием измерения сигнала настройки,
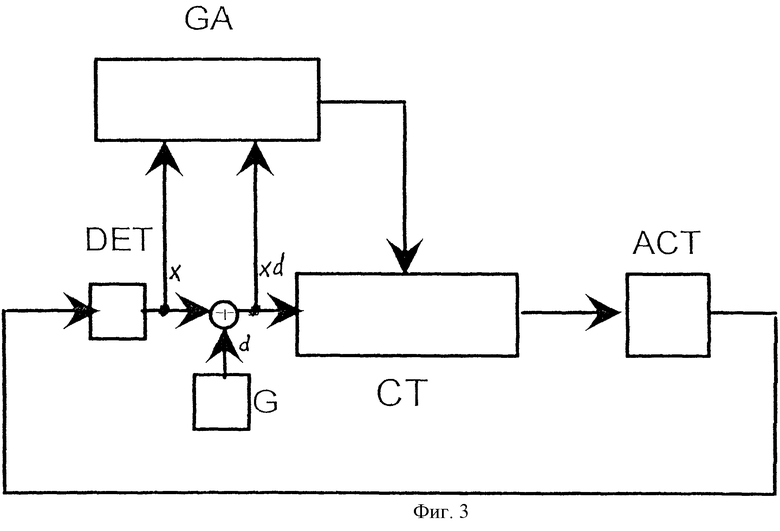
Фиг.3 - схематичная иллюстрация процедуры автоматической установки усиления с использованием измерения сигнала контура управления,
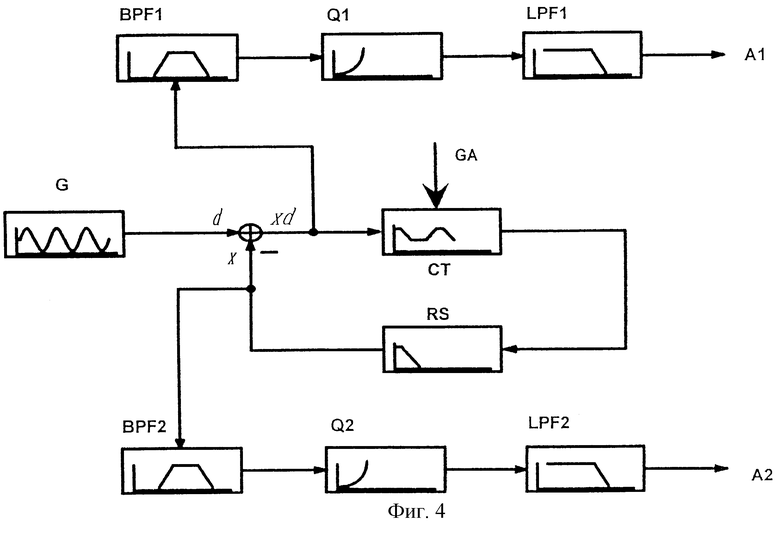
Фиг.4 - схематичная иллюстрация процедуры формирования сигнала измерения,
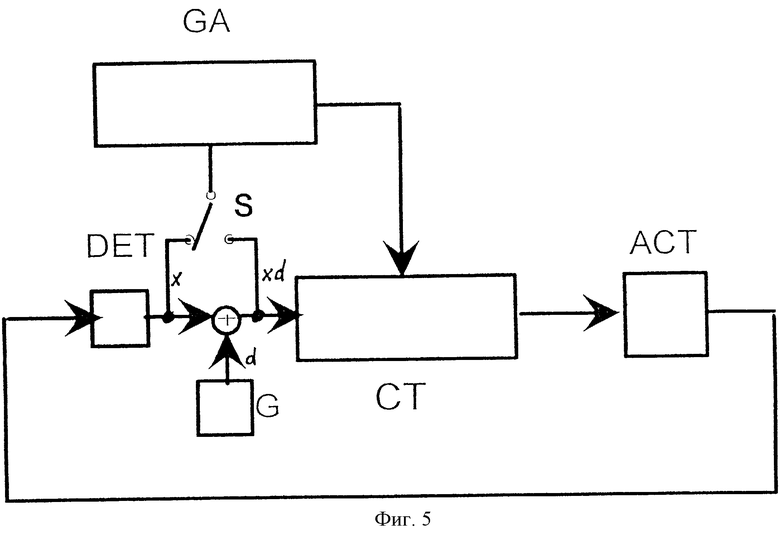
Фиг.5 - схематичная иллюстрация варианта осуществления устройства для формирования сигнала измерения,
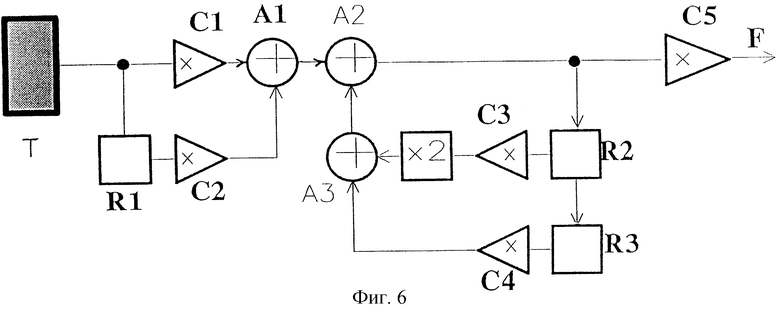
Фиг.6 - блок-схема генератора шумового сигнала,
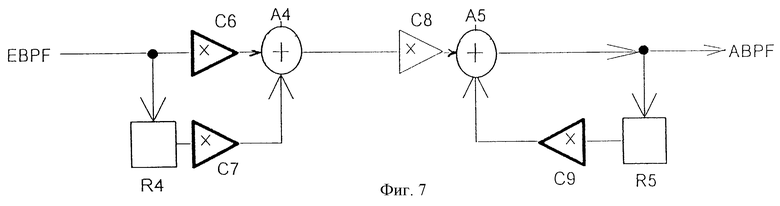
Фиг.7 - блок-схема полосового фильтра,
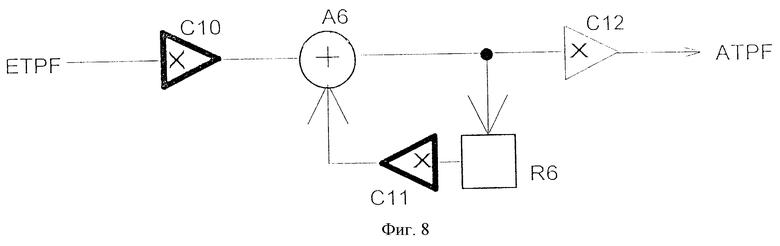
Фиг.8 - блок-схема фильтра нижних частот,
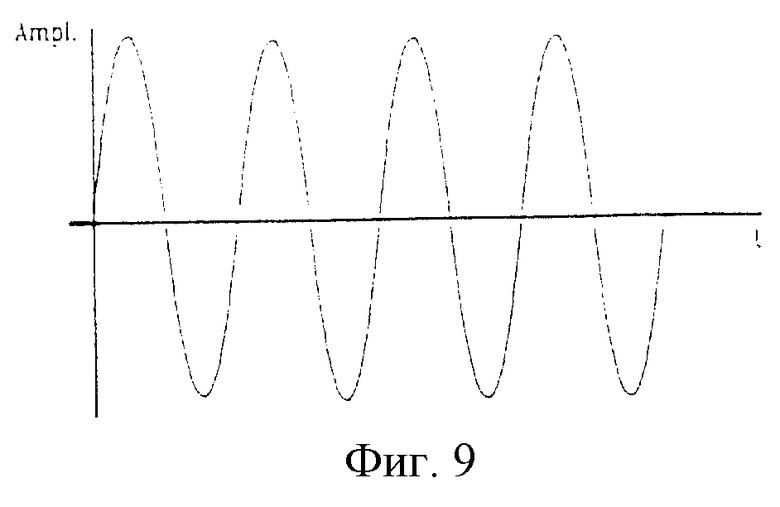
Фиг.9 - график зависимости амплитуды от времени частоты шумового сигнала,
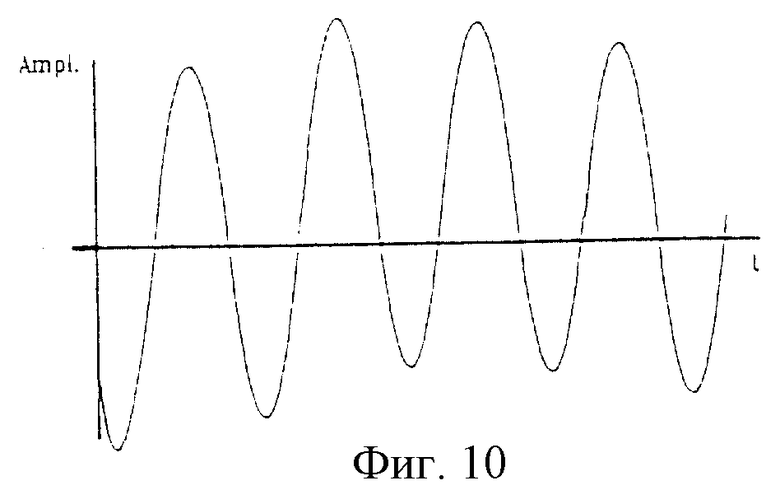
Фиг.10 - график зависимости амплитуды от времени частоты шумового сигнала с наложенным разностным сигналом контура управления,
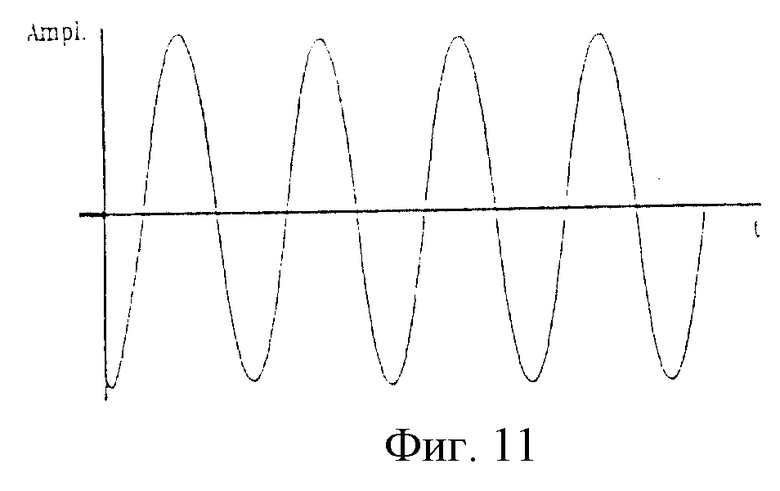
Фиг.11 - график зависимости амплитуды от времени частоты шумового сигнала, подвергнутого полосовой фильтрации, с наложенным разностным сигналом контура управления,
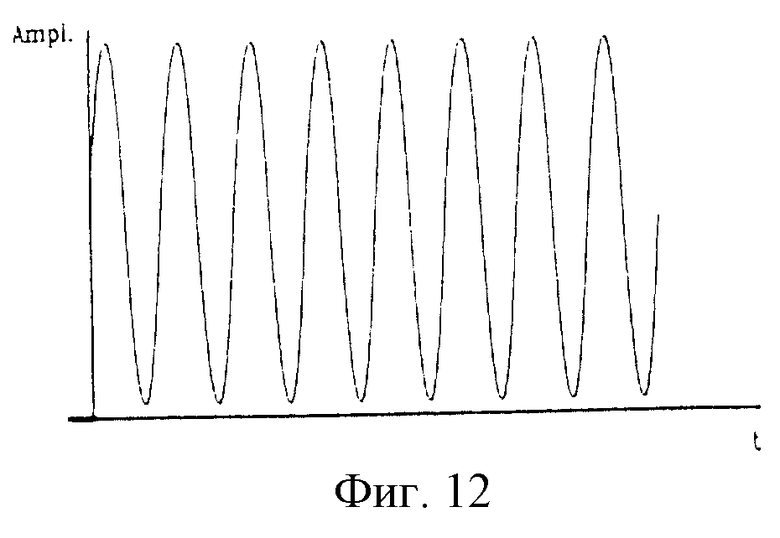
Фиг.12 - график зависимости амплитуды от времени частоты шумового сигнала, подвергнутого полосовой фильтрации и возведению в квадрат,
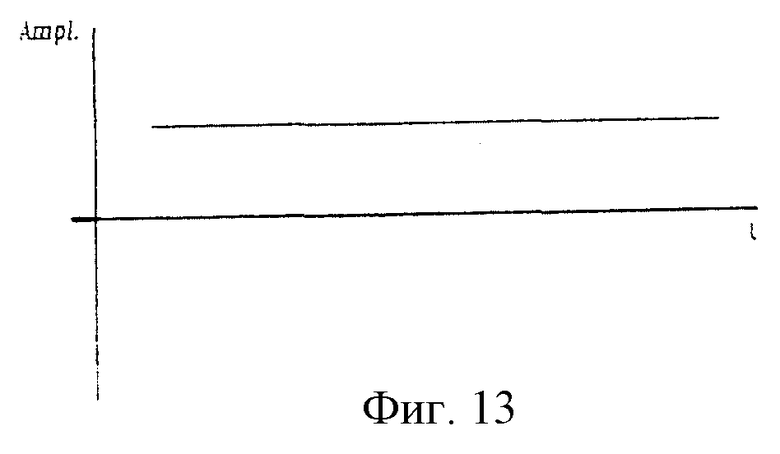
Фиг.13 - график зависимости амплитуды от времени частоты шумового сигнала, подвергнутого полосовой фильтрации, возведению в квадрат и низкочастотной фильтрации.
На фиг.1 представлена схема автоматической настройки усиления с использованием единственного этапа способа. В контуре управления, содержащем усилитель СТ с регулируемым усилением и управляемую систему RS, используется генератор G сигнала настройки, предназначенный для ввода сигнала настройки d в контур управления, и при вводе сигнала настройки d или после того, как он введен, используется средство GA установки усиления, предназначенное для автоматической установки усиления с использованием всего лишь одного этапа способа. В примере осуществления, показанном на фиг.1, ввод сигнала настройки d обеспечивается в точке между выходом управляемой системы RS и входом усилителя СТ с регулируемым усилением. Иными словами, сигнал настройки d вводится в средство суммирования, на которое подается переменная регулирования х и на выход которого выдается разностный сигнал xd контура управления. В принципе, однако, сигнал настройки d может быть введен в любую другую точку в контуре управления. Однако точка, в которую вводится сигнал настройки d, должна быть принята во внимание при вычислении коэффициента усиления, который должен быть установлен с использованием средства GA установки усиления.
При определении действующего коэффициента усиления путем сравнения сигнала настройки d с разностным сигналом контура управления xd, следует принять во внимание, например, смещение 6 дБ. С использованием средства GA установки усиления измеряется действующий коэффициент усиления для контура управления и вычисляется величина изменения усиления, которое необходимо осуществить. Затем эта величина используется для автоматической установки усиления в контуре управления. В принципе, усиление или коэффициент усиления может быть определен как отношение опорного сигнала к измеренному сигналу. Обычной практикой является сравнение амплитуд или фаз сигнала настройки и измеренного сигнала и изменение усиления в контуре управления до тех пор, пока не будет достигнуто определенное отношение амплитуд или фаз.
В соответствии с известными способами усиление в контуре управления изменялось поэтапно для приближения, таким образом, к желательной величине отношения. Поэтому для автоматической настройки усиления в контуре управления требовалось несколько этапов способа. Установка усиления с использованием всего лишь одного этапа обеспечена в изобретении за счет того, что измеряется действующий коэффициент усиления и вычисляется величина изменения, которую нужно внести для достижения требуемого значения усиления. Вычисленное значение, таким образом, представляет значение, которое необходимо использовать для установки усиления.
Используемый измеренный сигнал представляет собой сигнал из контура управления, этот сигнал представляет действующий коэффициент усиления. Сигнал, соответствующий действующему коэффициенту усиления, предпочтительно представлен амплитудой измеренного сигнала, а сигнал настройки d является входным сигналом. Для вычисления действующего коэффициента усиления измеренный сигнал, который представляет коэффициент усиления, когда сигнал настройки d вводится в контур управления, который еще не настроен, берется в отношении к опорному сигналу. Опорный сигнал образован сигналом настройки d и известен с учетом известных параметров сигнала настройки d. Отношение, полученное из измеренного сигнала и опорного сигнала, представляет, таким образом, действующий коэффициент усиления. Отношение, представляющее действующий коэффициент усиления, предпочтительно формируется с использованием микропроцессора, предусмотренного в составе средства GA настройки усиления. Поскольку сигнал настройки d представляет собой, например, частоту настройки, соответствующую частоте синусоидального шумового сигнала, частота которого соответствует значению, при котором кривая абсолютных значений для усиления разомкнутого контура управления пересекает линию 0 дБ, изменение усиления, которое следует осуществить в контуре управления, должно учитывать действующий коэффициент усиления. Например, для установки усиления на значение 1, усиление в контуре управления необходимо умножить на величину, обратную отношению, представляющему действующий коэффициент усиления.
Следовательно, автоматическая установка усиления в контуре управления достигается с использованием всего лишь одной операции способа. Поскольку изменение в усилении контура управления, которое необходимо осуществить для установки усиления, равного 1, известно, можно также установить и значения усиления, которые отличаются от 1. Это возможно, в частности, ввиду того факта, что кривая абсолютных значений для усиления в области частоты настройки примерно линейна. Конечное значение настройки определяется единственным измерением и последующим вычислением. Не требуется последовательной аппроксимации, откуда следует, что настройка осуществляется существенно быстрее.
В варианте, представленном на фиг.1, предполагается, что сигнал настройки d по существу является постоянным. При этом условии действующий коэффициент усиления определяется с использованием только одного измеренного сигнала, поскольку сигнал настройки d может предполагаться известным и соответствует частоте синусоидального шумового сигнала, равной или приближенно равной частоте, при которой кривая абсолютных значений для усиления разомкнутого контура управления пересекает линию 0 дБ.
Однако также возможно, как показано на фиг.2, чтобы сигнал настройки d использовался в качестве опорного сигнала, включаемого в процедуру измерений. Управляемая система RS, показанная на фиг.1, образована в данном случае исполнительным устройством ACT и детектором DET (фиг.2). Микропроцессор, предусмотренный в средстве GA установки усиления, определяет момент, в который сигнал настройки d вводится в контур управления. Для этой цели генератор G сигнала настройки соединен со средством GA установки усиления. В контуре управления, например в таком, как используется в устройствах воспроизведения компакт-дисков или цифровых видео-дисков, для обеспечения фокусировки сканирующего светового или лазерного луча на поверхности диска и для отслеживания дорожки с записью информации, исполнительное устройство ACT и детектор DET образованы звукоснимателем.
Средством для обеспечения трекинга или фокусировки светового луча является исполнительное устройство с линзой объектива, а фотодиоды, которые используются для оценки света, отраженного от носителя записи, образуют детектор DET. Кроме того, детектор DET обычно включает в себя предварительный усилитель. Вследствие допусков на изготовление при производстве как исполнительного устройства ACT, так и детектора DET и с учетом различных свойств сканируемых носителей записи следует иметь в виду, что параметры контура управления изменяются вследствие технологических причин. Это означает, что хотя параметры сигнала настройки d известны, усиление сигнала настройки d уже невозможно определить заранее или считать известным. Включение сигнала настройки d, используемого в качестве опорного сигнала, в процедуру измерений тем не менее обеспечивает возможность автоматической установки усиления с использованием единственной операции способа. Принцип варианта осуществления такого типа иллюстрируется на фиг.3. Существенный аспект данного варианта осуществления состоит в том, что средство GA установки усиления измеряет сигналы, предназначенные для измерений как выше, так и ниже точки ввода сигнала настройки d.
Схема, представленная на фиг.3, имеет отношение к следующему варианту осуществления изобретения, однако изобретение не ограничивается использованием сигналов, измеряемых как выше, так и ниже точки ввода сигнала настройки d.
Предпочтительный вариант осуществления для процедуры формирования измеряемого сигнала представлен на фиг.4. Как показано на фиг.4, сигнал настройки d вводится в точке в контуре управления, которая обычно соответствует вводу опорной переменной. Также возможно наложение опорной переменной, которая не показана, на сигнал настройки d. В упоминаемых контурах управления, однако, опорная переменная обычно выбирается равной 0. Как показано на фиг.4 для процедуры формирования измеряемого сигнала, сигнал регулируемой переменной х и разностный сигнал контура управления xd подаются на соответствующий полосовой фильтр BPF1 и BPF2. Каждый из полосовых фильтров BPF1, BPF2 соединен с соответствующим элементом возведения в квадрат Q1, Q2, каждый из которых соединен с соответствующим фильтром нижних частот LPF1, LPF2.
Полосовые фильтры BPF1 и BPF2 используются для отфильтровывания сигнала настройки d, который образован частотой синусоидального шумового сигнала и равен частоте, на которой кривая абсолютных значений для разомкнутого контура управления пересекает линию 0 дБ, из переменной регулирования х и из разностного сигнала xd контура управления. Элементы возведения в квадрат Q1 и Q2 формируют сигнал, который не зависит от знака, а последующие интеграторы или фильтры нижних частот LPF1 и LPF2 формируют среднее значение возведенной в квадрат частоты шумового сигнала. Выходной сигнал А1 с первого фильтра нижних частот LPF1 и выходной сигнал А2 со второго фильтра нижних частот LPF2 подаются затем на микропроцессор, который вычисляет абсолютные значения амплитуд переменной регулирования х и разностного сигнала xd контура управления. Для этого микропроцессор умножает каждый из выходных сигналов А1 и А2 сам на себя и затем вычисляет функцию квадратного корня.
Отношение амплитуд переменной регулирования х и разностного сигнала xd контура управления затем представляет действующее значение усиления для контура управления. Если отношение или полученное действующее значение усиления для контура управления отличается от 1, то это означает для данного контура управления, что частота настройки или частота синусоидального шумового сигнала усилена или ослаблена при текущей настройке соответственно действующему значению усиления. Поскольку выбранная частота настройки представляла собой частоту синусоидального шумового сигнала, при которой кривая абсолютных значений разомкнутого контура управления пересекает линию 0 дБ, в общем случае желательно, чтобы настройка осуществлялась на значение усиления, равное 1 или 0 дБ. Это желательное значение усиления устанавливается автоматически тем, что средство GA установки усиления используется для умножения действующего значения усиления контура управления на величину, обратную отношению амплитуд переменной регулирования х и разностного сигнала xd контура управления. Для этой цели усилитель СТ с регулируемым усилением в контуре управления предпочтительно содержит умножитель, который настроен на значение, равное обратной величине, измеренной в качестве действующего усиления. Это означает, что требуется лишь один этап способа для автоматической установки усиления в контуре управления. Определение значения усиления, которое должно быть установлено, или действующего значения усиления из отношения амплитуд переменной регулирования х и разностного сигнала xd контура управления стало возможным благодаря тому, что кривая абсолютных значений для усиления в области частоты настройки примерно линейна.
Учитывая описанный выше принцип, можно использовать данный способ для автоматической установки значений усиления, которые отличаются от 1. При действующем значении усиления, отличном от 1, отношение амплитуд переменной регулирования х и разностного сигнала xd контура управления умножается на желательное значение усиления дополнительно к умножению на величину, обратную этому отношению.
Если увеличение усиления контура управления известно, используемый сигнал настройки d может быть представлен частотой синусоидального шумового сигнала, отличной от частоты, при которой кривая абсолютных значений для усиления разомкнутого контура управления пересекает линию 0 дБ. Полосовые фильтры BPF1, BPF2, а если необходимо, то и фильтры нижних частот LPF1, LPF2 должны быть тогда выполнены в соответствии с таким выбором указанной частоты. С использованием действующего значения усиления, измеренного соответственно изобретению, частоты, для которой определено действующее значение усиления, и увеличения усиления, которое предполагается известным, определяют частоту, при которой усиление имеет значение 1 или пересекает линию 0 дБ.
Как показано для схемы формирования измеряемого сигнала на фиг.4, для формирования сигналов А1 и А2 используются соответствующие модули. Возможный вариант осуществления устройства для формирования измеряемого сигнала представлен на фиг.5. Как показано на фиг.5, регулируемая переменная х, выдаваемая детектором DET, и разностный сигнал xd контура управления, формируемый на входе усилителя СТ с регулируемым усилением, подаются один за другим на средство GA установки усиления, которое предпочтительно использует только один полосовой фильтр, элемент возведения в квадрат и фильтр нижних частот. Сигнал настройки d, формируемый с использованием генератора G сигнала настройки, затем вводится в контур управления, и при этом измеряется амплитуда переменной регулирования х и амплитуда разностного сигнала xd контура управления. Генератор G сигнала настройки предпочтительно представляет собой генератор, имеющий переменную частоту и постоянную амплитуду.
На фиг.6 показан возможный вариант осуществления генератора G сигнала настройки, включающего в себя имеющий стабильные границы двухполюсный рекурсивный цифровой фильтр. Это цифровой вариант включает в себя триггер Т, с которым соединены первый регистр R1 и первый умножитель С1. Первый регистр R1 соединен с входом второго умножителя С2, выход которого соединен с сумматором А1, на который также подается выходной сигнал первого умножителя С1. Один из входов второго сумматора А2 соединен с выходом первого сумматора А1, а выход второго сумматора А2 соединен с входом второго регистра R2. Второй регистр R2 имеет первый выход, соединенный с третьим умножителем С3, и второй выход, соединенный с третьим регистром R3. Выход третьего регистра R3 соединен с умножителем С4, выход которого соединен с одним из входов третьего сумматора A3, а выход третьего умножителя СЗ соединен с другим входом сумматора A3 через элемент возведения в квадрат х2. Выход сумматора A3 соединен с одним из входов сумматора А2, а общая точка соединения сумматора А2 и второго регистра R2 соединена с пятым умножителем, на выход которого выдается сигнал частоты F, причем эта частота может быть выбрана путем установки параметров умножителей. Сигнал частоты F имеет постоянную амплитуду.
Используемый полосовой фильтр предпочтительно выполнен так, как представлено на фиг.7. Вход EBPF полосового фильтра соединен с четвертым регистром R4 и с шестым умножителем С6. Выход шестого умножителя С6 соединен с четвертым сумматором А4, а другой вход сумматора А4 соединен с выходом седьмого умножителя С7, который соединен с четвертым регистром R4. Выход четвертого сумматора А4 соединен с одним из входов пятого сумматора А5 через восьмой умножитель С8. Выход пятого сумматора А5 образует выход ABPF полосового фильтра и точку соединения для цепи обратной связи, образованной пятым регистром R5 и девятым умножителем С9, который соединен с входом пятого сумматора А5.
Структура цифрового фильтра нижних частот представлена на фиг.8. Вход ETPF фильтра нижних частот образован десятым умножителем С10, выход которого соединен с шестым сумматором А6. Выход шестого сумматора А6 по цепи обратной связи соединен со вторым входом сумматора А6 через шестой регистр R6 и одиннадцатый умножитель С11, причем выход шестого сумматора А6 образует выход ATPF фильтра нижних частот, через двенадцатый умножитель С 12. Характеристики полосового фильтра и фильтра нижних частот установлены с использованием соответствующих коэффициентов. Эти коэффициенты являются соответствующими значениями установки умножителей.
На фиг.9-13 представлены соответствующие графики зависимости амплитуды от времени, иллюстрирующие формирование сигнала амплитуды.
На фиг.9 представлена частота синусоидального шумового сигнала, используемая в качестве сигнала настройки d и предпочтительно равная частоте, при которой кривая абсолютного значения для усиления разомкнутого контура управления пересекает линию 0 дБ. Введение сигнала настройки d в контур управления приводит к формированию разностного сигнала xd контура управления, который имеет, например, вид, показанный на фиг.10.
Как видно из фиг.10, амплитуда и фазовый угол сигнала настройки d, показанного на фиг.9, изменяются под влиянием контура управления. Это применимо как к разностному сигналу xd контура управления, так и к переменной регулирования х. Сигнал настройки d, изменяющийся под влиянием действующего усиления или действующих характеристик контура управления, подвергается полосовой фильтрации для отфильтровывания частоты сигнала настройки d из переменной регулирования х или из разностного сигнала xd контура управления.
Выходной сигнал полосового фильтра показан на фиг.11. Амплитуда этого сигнала выравнена, а частота равна частоте сигнала настройки d. Если действующее значение усиления для контура управления отличается от 1, то фаза сигнала, показанного на фиг.11, смещена относительно сигнала настройки d. Сигнал, представленный на фиг.11, имеющий выравненную амплитуду, затем возводится в квадрат, так что сигнал на выходе элемента возведения в квадрат не зависит от знака, как показано на фиг.12. В связи с тем, что при возведении в квадрат он умножается сам на себя, частота этого сигнала увеличена вдвое по сравнению с частотой сигнала, показанного на фиг.11.
Низкочастотная фильтрация сигнала, представленного на фиг.12, формирует сигнал амплитуды, показанный на фиг.13. Этот сигнал соответствует амплитуде переменной регулирования х или разностного сигнала xd контура управления. Отношение сформированных таким образом амплитуд переменной регулирования х или разностного сигнала xd контура управления соответствует действующему усилению контура управления для входного сигнала настройки d. Как пояснено выше, требуемое значение усиления затем устанавливается автоматически в контуре управления с использованием единственного этапа способа.
Изобретение не ограничивается представленными выше примерами его осуществления, где переменная регулирования и разностный сигнал контура управления использовались для измерения действующего усиления контура управления. При выборе точек соединения, отличных от указанных выше, для определения действующего усиления контура управления следует соответствующим образом учитывать их влияние на измеряемый коэффициент усиления.
Изобретение относится к автоматике и может использоваться в устройствах воспроизведения компакт-дисков или цифровых видеодисков, для фокусировки сканирующего или записывающего светового или лазерного луча на носителе оптической записи или для отслеживания дорожек с записью информации. Технический результат заключается в обеспечении быстрой и надежной установки усиления и/или настройки. В соответствии с изобретением, в одном этапе способа измеряют действующее усиление как отношение значений амплитуд переменной регулирования (х) и разностного сигнала (xd) управления, сформированного введением сигнала (d) настройки в контур управления, вычисляют изменение усиления, которое необходимо осуществить в контуре управления, из измеренного значения усиления формируют величину, обратную измеренному усилению, которую используют для вычисления изменения усиления для автоматической установки усиления. 2 с. и 12 з.п. ф-лы, 13 ил.
| DE 3635859 A1, 05.05.1988 | |||
| US 5130663 А, 14.07.1992 | |||
| US 3922617, 25.11.1975 | |||
| Справочник по нелинейным схемам./ Под ред | |||
| Д.ШЕЙНГОЛДА | |||
| - М.: Мир, 1977, с.178, фиг.2.5.14 | |||
| КРИВИЦКИЙ Б.Х | |||
| Системы автоматической регулировки усиления | |||
| - М.: Радио и связь, 1982, с.5, рис.1.1.б. |

