Область техники, к которой относится настоящее изобретение
[0001] Настоящее изобретение относится к системе отслеживания элементов износа и способу отслеживания элементов износа. В частности, настоящее изобретение относится, помимо прочего, к системе отслеживания элементов износа и способу отслеживания износа и/или наличия (или отсутствия) одного или нескольких землеройных орудий, таких как зуб ковша, защитный сегмент ковша или адаптер ковша экскаватора.
Предшествующий уровень техники настоящего изобретения
[0002] Ссылки на предшествующий уровень техники, содержащиеся в настоящем документе, не должны рассматриваться как признание того факта, что эта область техники является известным уровнем техники.
[0003] Многие виды деятельности предусматривают использование элементов износа, обычно в виде расходных съемных компонентов, выполненных с возможностью изнашивания для защиты какого-либо оборудования. Одной из заметных сфер применения элементов износа является горнодобывающая промышленность, где ковши и прочие элементы экскаваторов снабжены элементами износа, которые устанавливаются в зонах повышенного износа, таких как режущая кромка ковша экскаватора, с целью защиты самого ковша. Такие элементы износа часто включают в себя зубья ковша экскаватора в сборе и межзубьевые защитные сегменты ковша.
[0004] Зубья ковша экскаватора в сборе, устанавливаемые на режущей кромке ковша экскаватора, и прочие элементы подобного рода обычно включают в себя съемный режущий зуб, тело адаптера и оголовок адаптера, который прикрепляется к режущей кромке ковша или иному элементу подобного рода методом сварки или иным способом. Между зубьями ковша экскаватора в сборе обычно располагаются съемные межзубьевые сегменты с целью защиты кромки ковша. На заднем конце зубьев обычно предусмотрена гнездообразная выемка для размещения пригодной к заведению в нее охватываемой раструбом передней части оголовка адаптера, а для закрепления зуба на адаптере с возможностью его последующего съема обычно используется замковая система.
[0005] В ходе эксплуатации такие элементы износа обычно подвергаются существенному износу и продолжительному воздействию различных сил. По мере износа различных компонентов замковая система может ослабнуть, вследствие чего возрастает риск утраты землеройного элемента или всего узла, состоящего из адаптера и зуба. Это обуславливает длительное время простоя, необходимое для замены утраченных элементов износа; и в тех случаях, когда компоненты не подлежат восстановлению, это может привести к повреждениям и/или продолжительным простоям во время выполнения последующих технологических операций, особенно если отсоединение осталось незамеченным. К примеру, если элемент износа отсоединился от ковша экскаватора, этот элемент износа может повредить другое оборудование на шахтной площадке, когда его может непреднамеренно зацепить, например, камнедробилка. Кроме того, проведение земляных работ с отсоединенными или сильно изношенными элементами износа по определению менее эффективно.
[0006] В попытках предотвратить случайное отсоединение элементов износа на рабочих участках проводятся планово-предупредительные ремонтные работы в соответствии с определенным графиком. Для непрерывного контроля и информирования о потере элементов износа также используются и другие технологии. Однако эти технологии обычно сложны и не подходят для всех условий, возникающих, например, на шахтной площадке.
[0007] Одна такая система отслеживания износа и/или утраты элементов износа описана в публикации РСТ №. WO 2018/009955 А1, содержание которой полностью включено в настоящий документ посредством ссылки. И хотя она обеспечивает определенную эффективность, особенно в контролируемых условиях внешней среды, было установлено, что при длительной эксплуатации утрачивается способность детектирования утраты землеройных орудий по мере их износа. Кроме того, описанная система в значительной мере ограничена разрешающей способностью прибора датчика, и в любом случае она нацелена на отслеживание зубьев, и поэтому не способна эффективно контролировать другие элементы износа, такие как защитные сегменты ковша.
Цель настоящего изобретения
[0008] Цель настоящего изобретения заключается в том, чтобы предложить систему отслеживания элементов износа и способ ее использования, которые устранили бы или сгладили один или несколько недостатков или проблем, описанных выше, или которые представляли бы собой, по меньшей мере, приемлемую альтернативу.
[0009] Другие предпочтительные цели настоящего изобретения станут очевидными после ознакомления с последующим описанием.
Краткое раскрытие настоящего изобретения
[0010] Согласно одному из вариантов своего осуществления, хотя необязательно единственному или наиболее широкому, настоящее изобретение относится к системе отслеживания орудия рабочего оборудования, причем эта система включает в себя:
один или несколько датчиков, установленных на рабочем оборудовании и обращенных в сторону орудия; и
процессор, выполненный с возможностью:
получения данных, относящихся к орудию, с одного или нескольких датчиков;
генерирования трехмерного представления, по меньшей мере, части орудия с использованием полученных данных;
сравнения сгенерированного трехмерного представления с ранее сгенерированным трехмерным представлением;
идентификации одного или нескольких таких событий, как износ и утрата, по меньшей мере, части орудия путем сравнения сгенерированного трехмерного представления с ранее сгенерированным трехмерным представлением; и
выдачи индикации об износе или утрате в случае идентификации износа или утраты, по меньшей мере, части орудия.
[0011] В предпочтительном варианте орудие характеризуется наличием изнашиваемых частей. Эти изнашиваемые части предпочтительно выполнены с возможностью их замены. В предпочтительном варианте орудием служит землеройное орудие.
[0012] Один или несколько датчиков могут включать в себя, по меньшей мере, один датчик, способный получать данные, отображающие трехмерную форму поверхности землеройного орудия. Один или несколько датчиков могут включать в себя времяпролетный датчик. Один или несколько датчиков могут включать в себя дальномерный датчик. Один или несколько датчиков могут включать в себя лазерный дальномерный датчик. Один или несколько датчиков могут включать в себя датчик LIDAR (обнаружения, идентификации и определения дальности с помощью света). Датчик LIDAR может представлять собой трехмерный датчик LIDAR. Один или несколько датчиков могут включать в себя многослойный, времяпролетный, сканирующий лазерный дальномерный датчик.
[0013] Один или несколько датчиков могут включать в себя датчики стереоскопического зрения. Датчики стереоскопического зрения могут выдавать данные в различных спектрах, включая видимый спектр и/или тепловую инфракрасную область спектра. Один или несколько датчиков могут включать в себя не времяпролетные дальномерные системы. Не времяпролетные дальномерные системы могут включать в себя структурированные трехмерные дальномерные системы на базе освещения. Один или несколько датчиков могут включать в себя радар. Один или несколько датчиков могут включать в себя ультразвуковые датчики. Один или несколько датчиков могут включать в себя датчики, выполненные с возможностью детектирования диаграммы направленности излучения. Диаграмма направленности излучения может создаваться и/или модифицироваться землеройным орудием. Один или несколько датчиков могут использовать магнитно-резонансную визуализацию (MRI). Один или несколько датчиков могут включать в себя акустические датчики. Один или несколько датчиков могут включать в себя двумерный датчик, причем по данным двумерного датчика выводится трехмерное представление. Трехмерное представление может выводиться по данным двумерного датчика на основании анализа освещенности и/или машинного обучения.
[0014] Один или несколько датчиков могут включать в себя одинарный датчик, выполненный с возможностью измерения и выдачи данных, отображающих трехмерную форму поверхности, по меньшей мере, части землеройного орудия. В альтернативном варианте один или несколько датчиков могут включать в себя множество датчиков. Множество датчиков может включать в себя оптические фотоприемники, такие как камеры. Множество датчиков может включать в себя, по меньшей мере, пару двумерных сканирующих дальномеров, ориентированных относительно друг друга под разными углами для проведения измерений. Двумерные сканирующие дальномеры могут включать в себя лазерные дальномеры. Двумерные сканирующие дальномеры могут быть ориентированы относительно друг друга под углом около 90° для проведения измерений. Генерирование трехмерного представления, по меньшей мере, части землеройного орудия с использованием данных, полученных с одного или нескольких датчиков, может предусматривать конфигурирование процессора для сбора множества векторных разверток в течение определенного периода времени с целью генерирования трехмерного представления. Процессор может быть выполнен с возможностью сбора множества векторных разверток в течение определенного периода времени с целью генерирования трехмерного представления с использованием данных оценки движения.
[0015] Процессор может быть выполнен с возможностью объединения данных с датчиков, считываемых разными способами и обладающих разной точностью воспроизведения и/или характеристиками по шуму, с целью генерирования трехмерного представления. Объединение данных с датчиков может предусматривать использование комбинаторного алгоритма. Например, данные с датчика LIDAR и радара могут объединяться с использованием комбинаторного алгоритма, такого как фильтр Калмана.
[0016] Один или несколько датчиков могут быть установлены на рабочем оборудовании таким образом, чтобы землеройное орудие находилось на линии их прямой видимости. Один или несколько датчиков могут располагаться на самом орудии, где часть орудия, представляющая интерес, находится на линии их прямой видимости. Во время эксплуатации рабочего оборудования линия прямой видимости может быть непрерывной. В альтернативном варианте во время эксплуатации рабочего оборудования линия прямой видимости может быть периодической. Один или несколько датчиков могут быть установлены на подвижных элементах рабочего оборудования. Один или несколько датчиков могут быть установлены на подвижной штанге рабочего оборудования. Рабочим оборудованием может служить экскаватор. Один или несколько датчиков могут быть установлены на рукояти экскаватора. Один или несколько датчиков могут быть установлены на стреле экскаватора. Один или несколько датчиков могут быть установлены на корпусе или кабине экскаватора. Один или несколько датчиков могут быть установлены на ковше экскаватора.
[0017] Процессор может быть выполнен с возможностью генерирования трехмерного представления, по меньшей мере, части землеройного орудия путем объединения данных, полученных с одного или нескольких датчиков, с оценкой движения. Оценка движения может быть выведена по данным с датчиков. Оценка движения может выводиться по данным с датчиков по мере перемещения землеройного орудия в поле обзора.
[0018] Процессор может быть выполнен с дополнительной возможностью предварительной обработки полученных данных для генерирования трехмерного представления. Процессор может быть выполнен с дополнительной возможностью предварительной обработки полученных данных в пределах заданного диапазона. Предварительная обработка может предусматривать селекцию по дальности. Предварительная обработка может предусматривать множественные сканирования с использованием чересстрочной развертки. Множественные сканирования с использованием чересстрочной развертки могут дать более широкое эффективное поле обзора.
[0019] Предварительная обработка может предусматривать определение того, что землеройное орудие находится по существу в поле обзора одного или нескольких датчиков. Эта оценка может предусматривать идентификацию того, указывают ли данные с датчиков на то, что в выбранных точках землеройное орудие идентифицировано как присутствующее или отсутствующее. Оценка может предусматривать определение отношения точек, в которых предполагается наличие землеройного орудия, к точкам, в которых предполагается отсутствие землеройного орудия. Оценка может предусматривать сравнение указанного отношения с заданным пороговым значением. Заданное пороговое значение может основываться на известной геометрии землеройного орудия. В альтернативном варианте оценка может основываться на конечном автомате. Конечный автомат может содержать одно или несколько следующих состояний: элементы износа не видны; элементы износа видны частично; элементы износа видны полностью; элементы износа находятся частично за пределами поля обзора датчиков; и элементы износа находятся полностью за пределами поля обзора датчика. Определение состояния может основываться на эвристических правилах, согласно которым идентифицируются условия пространственного распределения трехмерных точек, соответствующие каждому состоянию. Оценка может быть также дополнена механизмом отклонения, который отбрасывает данные, указывающие на то, что элементы износа могут по-прежнему входить в стенку выработки или быть закрыты материалом, который не представляет какого-либо интереса. Механизм отклонения может производить проверку на наличие пустых данных в пределах известных размеров орудия. Механизм отклонения может проверять примерную форму (например, плоскую, сферическую или эллиптическую) орудия путем изучения результатов анализа главных компонент трехмерных точек.
[0020] Процессор может быть выполнен с возможностью генерирования трехмерного представления путем объединения множества наборов данных с датчиков, полученных в разное время, в единую трехмерную модель. Объединение может предусматривать объединение данных с датчиков в течение определенного периода времени, начиная с момента, когда было установлено, что землеройное орудие находится по существу в поле обзора одного или нескольких датчиков. Объединение может предусматривать вокселизацию данных с датчиков. Точки из отдельных наборов данных, относящихся к одному вокселу, могут быть слиты в единую точку. Точки из отдельных наборов данных, относящихся к одному вокселу, могут быть слиты в единую точку с использованием статистической модели. Точки из отдельных наборов данных, относящихся к одному вокселу, могут быть слиты в единую точку, отображающую медиану.
[0021] Процессор может быть выполнен с возможностью генерирования трехмерного представления путем объединения множества наборов данных с датчиков, полученных в разное время, в единую двухмерную модель, такую как карта дальностей. Объединение может предусматривать объединение данных с датчиков в течение определенного периода времени, начиная с момента, когда было установлено, что землеройное орудие находится по существу в поле обзора одного или нескольких датчиков. Объединение может предусматривать проецирование трехмерных данных на плоскую, цилиндрическую, сферическую или иную непрерывную поверхность для получения двумерного представления с координатной сеткой. Точки из отдельных наборов данных, относящиеся к одному пикселю, могут быть слиты с использованием статистической модели. Статистическая модель может включать в себя интегральную среднюю и/или фильтр Калмана. Фильтр Калмана может быть одномерным.
[0022] Процессор может быть выполнен с возможностью генерирования трехмерного представления путем выравнивания множества трехмерных моделей. Выравнивание может предусматривать совмещение различных трехмерных моделей в общей системе координат. Выравнивание может предусматривать использование выбранной модели в качестве опорной модели и выравнивание остальных трехмерных моделей по этой выбранной модели. Выравнивание сгенерированных моделей может предусматривать использование процесса ICP (итеративного алгоритма ближайших точек) или NDT (преобразования нормальных распределений). Процесс выравнивания может характеризоваться ограничениями, такими как, например, предполагаемые степени свободы. Выравнивание может предусматривать определение матрицы дробно-линейного преобразования. Матрица дробно-линейного преобразования может основываться на согласовании ключевых точек, геометрических признаков или осей между опорной моделью и промежуточными моделями. Определение осей для преобразования может основываться на анализе главных компонент (PCА).
[0023] Процессор может быть выполнен с дополнительной возможностью преобразования сгенерированного трехмерного представления в двухмерные данные о дальности. Двухмерные данные о дальности могут представлять собой изображение. Сгенерированное трехмерное представление может быть преобразовано в двумерное изображение путем выбора плоскости трехмерного представления и индикации данных о дальности, перпендикулярных этой плоскости, с разными характеристиками изображения. Разные характеристики изображения могут включать в себя разные цвета или яркость. Данные о дальности, перпендикулярные выбранной плоскости, могут обозначаться с использованием цветового градиента, отображаемого на прямоугольную координату. Двумерное изображение может фильтроваться с использованием, например, открывающего/замыкающего или расширяющего/сужающего фильтра. Множество двумерных изображений может объединяться в течение определенного периода времени для уменьшения шума.
[0024] Процессор может быть выполнен с дополнительной возможностью сравнения сгенерированного трехмерного представления с ранее сгенерированным трехмерным представлением путем сравнения двумерных изображений, которые включают в себя данные о дальности. Двумерные изображения могут сравниваться путем вычитания изображений. Переменные временные развертки могут включать в себя первую временную развертку, которая короче второй временной развертки. Вторая временная развертка может быть, по меньшей мере, в два раза длиннее, чем первая временная развертка. Вторая временная развертка может быть на порядок величины длительнее, чем первая временная развертка. Первая временная развертка может характеризоваться длительностью менее часа. Вторая временная развертка может превышать 12 часов.
[0025] Процессор может быть выполнен с дополнительной возможностью идентификации одного или обоих таких событий, как износ и утрата, по меньшей мере, части землеройного орудия путем анализа результата сравнения двумерных изображений. Существенная разница в этом сравнении с первой временной разверткой может указывать на утрату, по меньшей мере, части землеройного орудия. Менее существенная разница в этом сравнении со второй временной разверткой может указывать на износ, по меньшей мере, части землеройного орудия.
[0026] Анализ может предусматривать создание изображения разницы. Изображение разницы может быть поделено на отдельные зоны. Эти зоны могут соответствовать зонам землеройного орудия, представляющим интерес. Зоны, представляющие интерес, могут включать в себя предполагаемое местоположение элементов износа землеройного орудия. Элементы износа могут включать в себя один или несколько таких элементов, как зубья, адаптеры, защитные сегменты и вкладыши. Изображение разницы может быть поделено на отдельные зоны, исходя из заданной геометрической модели землеройного орудия. Изображение разницы может быть поделено на отдельные зоны с использованием анализа методом обнаружения границ элементов изображения. Анализ методом обнаружения границ элементов изображения может использоваться для идентификации признаков по существу вертикальных линий. Изображение разницы может быть поделено на отдельные вертикальные зоны.
[0027] Анализ может предусматривать измерение изменений в изображении разницы в каждой зоне. Измерение изменений в изображении разницы в каждой зоне может предусматривать определение количества пикселей. Определение количества пикселей может предусматривать подсчет смежных пикселей. Количество смежных пикселей может указывать на участки износа и/или утраты в этой зоне. Смежные пиксели могут подсчитываться построчно. Количество пикселей, подсчитанных в строке, может сравниваться с пороговой величиной для индикации того, мог ли иметь место износ и/или утрата. Пороговая величина может быть задана заранее. Пороговая величина может быть адаптивной, например, основанной на сравнении значения в динамике по времени или получаемой путем машинного обучения. Машинное обучение может опираться на обратную связь с оператором. Анализ может предусматривать использованием процесса свертки. Процесс свертки может предусматривать использование сверточного фильтра. Сверточный фильтр может выдать местоположение и величину изменений, где отличия обусловлены не утратой, а - например - только изменением глубины. Подавление шумов может также осуществляться с использованием маски изображения, выведенной по изображению, созданному при более ранней временной развертке и наложенной на текущее изображение. Эта маска предотвращает анализ тех частей изображения, которые считаются нерелевантными.
[0028] Процессор может быть выполнен с возможностью выдачи индикации об идентифицированном износе или утрате оператору рабочего оборудования. Выдаваемые данные могут содержать сигнал тревоги. Сигнал тревоги может представлять собой один или несколько таких сигналов, как акустический сигнал тревоги, визуальный сигнал тревоги и тактильный сигнал тревоги. Сигнал тревоги может быть передан оператору рабочего оборудования. Сигнал тревоги может также или вместо этого передаваться удаленно. В предпочтительном варианте сигнал тревоги передается удаленно на периферию вне пределов оборудования. Сигнал тревоги может включать в себя первый сигнал тревоги, указывающий на износ, и второй сигнал тревоги, отличающийся от первого сигнала тревоги и указывающий на утрату. Индикация износа или утраты может использоваться системами управления рабочего оборудования для адаптации его работы.
[0029] Система может дополнительно включать в себя систему идентификации транспортных средств. Система идентификации транспортных средств может включать в себя один или несколько датчиков, идентифицирующих транспортное средство. Система идентификации транспортных средств может использовать процессор для выполнения операции по идентификации транспортного средства. Система идентификации транспортных средств обеспечивает возможность идентификации соответствующего транспортного средства при установлении факта утраты части землеройного орудия, такого как элемент износа. Система идентификации транспортных средств способствует установлению соответствующего транспортного средства, на которое может быть доставлен отсоединенный элемент износа или иной элемент подобного рода во время операции по доставке, выполняемой рабочим оборудованием.
[0030] Процессор может быть выполнен с дополнительной возможностью регистрации и/или передачи координат глобальной навигационной спутниковой системы (GNSS) при идентификации утраты, по меньшей мере, части орудия. Система GNSS может включать в себя систему GPS (глобальную систему позиционирования).
[0031] В предпочтительном варианте процессор располагается на рабочем оборудовании. Однако процессор может располагаться на удалении. Процессор может включать в себя один или несколько сетевых серверов. Рабочее оборудование может содержать процессор для локальной обработки данных, а также сообщаться с одним или несколькими сетевыми процессорами для удаленной обработки данных.
[0032] Согласно другому варианту своего осуществления настоящее изобретение относится к способу отслеживания одного или нескольких элементов износа орудия рабочего оборудования, причем этот способ предусматривает:
получение данных, относящихся к орудию, с одного или нескольких датчиков, установленных на рабочем оборудовании;
генерирование трехмерного представления, по меньшей мере, части орудия с использованием данных, полученных с одного или нескольких датчиков;
сравнение сгенерированного трехмерного представления с ранее сгенерированным трехмерным представлением;
идентификацию одного или нескольких таких событий, как износ и утрата, по меньшей мере, части орудия, исходя из результата выполнения стадии сравнения; и
выдачу индикации об износе или утрате, по меньшей мере, части орудия после того, как на стадии идентификации одного или нескольких таких событий, как износ и утрата, по меньшей мере, части землеройного орудия будет идентифицирован такой износ или утрата.
[0033] В предпочтительном варианте один или несколько элементов износа являются заменяемыми. В предпочтительном варианте орудием служит землеройное орудие.
[0034] Стадия получения данных, относящихся к землеройному орудию, с одного или нескольких датчиков может предусматривать прием трехмерных данных, относящихся, по меньшей мере, к части землеройного орудия. Стадия получения данных может предусматривать прием данных с одинарного датчика. В альтернативном варианте стадия получения данных может предусматривать получение информации с множества датчиков. Предложенный способ может дополнительно предусматривать выполнение стадии преобразования данных с множества датчиков в трехмерные данные.
[0035] Стадия генерирования трехмерного представления, по меньшей мере, части землеройного орудия может предусматривать объединение данных, полученных с одного или нескольких датчиков, с оценкой движения. Предложенный способ может дополнительно предусматривать выведение оценки движения по данным с датчика, предпочтительно по данным, получаемым по мере перемещения землеройного орудия в поле обзора датчика.
[0036] Предложенный способ может дополнительно предусматривать предварительную обработку данных, полученных с датчиков, до начала выполнения стадии генерирования трехмерного представления. Предложенный способ может дополнительно предусматривать стадию предварительной обработки данных, полученных с датчиков, путем идентификации данных с датчиков в пределах заданного диапазона, предпочтительно методом селекции по дальности. Стадия предварительной обработки может предусматривать множественные сканирования с использованием чересстрочной развертки. Множественные сканирования с использованием чересстрочной развертки могут дать более широкое эффективное поле обзора данных с датчиков.
[0037] Предложенный способ может дополнительно предусматривать стадию определения того, что землеройное орудие находится по существу в поле обзора одного или нескольких датчиков. Стадия оценки может предусматривать идентификацию того, указывают ли данные с датчиков на то, что в выбранных точках землеройное орудие идентифицировано как присутствующее или отсутствующее. Стадия оценки может предусматривать определение отношения точек, в которых предполагается нахождение землеройного орудия, к точкам, где предполагается отсутствие землеройного орудия. Стадия оценки может предусматривать сравнение этого отношения с заданным пороговым значением. Заданное пороговое значение может быть основано на известной геометрии землеройного орудия.
[0038] Предложенный способ может дополнительно предусматривать стадию объединения множества наборов данных с датчиков, полученных в разное время, в единую трехмерную модель. Стадия объединения может предусматривать объединение данных с датчиков в течение определенного периода времени, начиная с того момента, когда было установлено, что землеройное орудие находится по существу в поле обзора одного или нескольких датчиков. Стадия объединения может предусматривать вокселизацию данных с датчиков. Предложенный способ может дополнительно предусматривать стадию сведения отдельных наборов данных, относящихся в одному вокселу, в единую точку. Точки из отдельных наборов данных, относящихся к одному вокселу, могут быть слиты в единую точку с использованием статистической модели. Точки из отдельных наборов данных, относящихся к одному вокселу, могут быть слиты в единую точку, отображающую медиану.
[0039] Предложенный способ может дополнительно предусматривать стадию выравнивания множества трехмерных моделей. Стадия выравнивания может предусматривать совмещение различных трехмерных моделей в общей системе координат. Стадия выравнивания может предусматривать использование выбранной модели в качестве опорной модели и выравнивание остальных трехмерных моделей по этой выбранной модели. Стадия выравнивания сгенерированных моделей может предусматривать использование процесса ICP (итеративного алгоритма ближайших точек) или NDT (преобразования нормальных распределений). Процесс ICP может характеризоваться ограничениями, такими как, например, предполагаемые степени свободы. Стадия выравнивания может предусматривать определение матрицы дробно-линейного преобразования. Матрица дробно-линейного преобразования может основываться на установлении соответствия между ключевыми точками, геометрическими признаками или осями опорной модели и промежуточных моделей.
[0040] Предложенный способ может дополнительно предусматривать преобразование сгенерированного трехмерного представления в двухмерные данные о дальности. Стадия преобразования в двухмерные данные о дальности может предусматривать создание изображения. Стадия преобразования может предусматривать выбор плоскости трехмерного представления и индикацию данных о дальности, перпендикулярных этой плоскости, с разными характеристиками изображения. Разные характеристики изображения могут включать в себя разные цвета. Данные о дальности, перпендикулярные выбранной плоскости, могут обозначаться с использованием цветового градиента, отображаемого на прямоугольную координату. Предложенный способ может дополнительно предусматривать фильтрацию двумерного изображения. Стадия фильтрации может предусматривать использование одного или нескольких таких фильтров, как открывающий/замыкающий или расширяющий/сужающий фильтр. Фильтрация может предусматривать уменьшение шум путем объединения множества двумерных изображений в течение определенного периода времени.
[0041] Стадия сравнения сгенерированного трехмерного представления с ранее сгенерированным трехмерным представлением может предусматривать сравнение двумерных изображений, которые включают в себя данные о дальности. Стадия сравнения может предусматривать сравнение двумерных изображений по переменным временным разверткам. Стадия сравнения может предусматривать вычитание одного изображения из другого. Переменные временные развертки могут включать в себя первую временную развертку, которая короче второй временной развертки. Предложенный способ может дополнительно предусматривать стадию анализа результата сравнения двумерных изображений.
[0042] Предложенный способ может дополнительно предусматривать стадию создания изображения разницы. Предложенный способ может дополнительно предусматривать стадию разделения изображения разницы на отдельные зоны. Эти зоны могут соответствовать зонам землеройного орудия, представляющим интерес. Зоны, представляющие интерес, могут включать в себя предполагаемое местоположение элементов износа землеройного орудия. Элементы износа могут включать в себя один или несколько таких элементов, как зубья, адаптеры, защитные сегменты и вкладыши. Изображение разницы может быть поделено на отдельные зоны, исходя из заданной геометрической модели землеройного орудия. Стадия разделения изображения разницы на отдельные зоны может предусматривать использование анализа методом обнаружения границ элементов изображения. Анализ методом обнаружения границ элементов изображения может использоваться для идентификации признаков по существу вертикальных линий. Изображение разницы может быть поделено на отдельные вертикальные зоны.
[0043] Стадия сравнения может дополнительно предусматривать стадию измерения изменений в изображении разницы в каждой выделенной зоне. Измерение изменений в изображении разницы в каждой зоне может предусматривать определение количества пикселей. Стадия определения количества пикселей может предусматривать подсчет смежных пикселей. Количество смежных пикселей может указывать на участки износа и/или утраты в этой зоне. Стадия определения количества пикселей может предусматривать подсчет пикселей в строках. Количество пикселей, подсчитанных в строке, может сравниваться с пороговой величиной для индикации того, мог ли иметь место износ и/или утрата. Пороговая величина может быть задана заранее. Пороговая величина может быть адаптивной, например, основанной на сравнении значения в динамике по времени или получаемой путем машинного обучения. Машинное обучение может опираться на обратную связь с оператором.
[0044] Стадия выдачи индикации износа или утраты может предусматривать выдачу индикации оператору рабочего оборудования. Стадия выдачи индикации может предусматривать выдачу сигнала тревоги. Сигнал тревоги может представлять собой один или несколько таких сигналов, как акустический сигнал тревоги, визуальный сигнал тревоги и тактильный сигнал тревоги. Сигнал тревоги может быть передан оператору рабочего оборудования. Стадия выдачи индикации может предусматривать передачу индикации утраты и/или износа и/или сигнала тревоги дистанционно. Сигнал тревоги может включать в себя первый сигнал тревоги, указывающий на износ, и второй сигнал тревоги, отличающийся от первого сигнала тревоги и указывающий на утрату. Предложенный способ может дополнительно предусматривать стадию использования индикации износа или утраты в системах управления рабочим оборудованием для адаптации его работы.
[0045] Предложенный способ может дополнительно предусматривать стадию идентификации сопряженного транспортного средства. Предложенный способ может дополнительно предусматривать идентификацию сопряженного транспортного средства в случае установления события утраты. Предложенный способ может дополнительно предусматривать определение сопряженного транспортного средства, на которое может быть доставлен отсоединенный элемент износа или иной элемент подобного рода во время операции по доставке, выполняемой рабочим оборудованием.
[0046] Предложенный способ может дополнительно предусматривать стадию передачи данных, относящихся к орудию, полученных с одного или нескольких датчиков, установленных на рабочем оборудовании, на сервер. Сервер может выполнять стадии генерирования, сравнения, идентификации и/или выдачи индикации. Предложенный способ может дополнительно предусматривать получение данных с сервера, указывающих на износ или утрату, по меньшей мере, части орудия.
[0047] Согласно еще одному варианту осуществления настоящего изобретения предложена система отслеживания элементов износа орудия, предпочтительно землеройного орудия рабочего оборудования, причем эта система включает в себя:
один или несколько датчиков, установленных на рабочем оборудовании, которое снабжено орудием, находящимся в считывающем поле обзора; и
процессор, выполненный с возможностью реализации способа отслеживания одного или нескольких элементов износа орудия рабочего оборудования согласно описанию, представленному выше.
[0048] Согласно еще одному варианту своего осуществления настоящее изобретение относится к рабочему оборудованию для земляных работ, такому как экскаватор, включающему в себя:
землеройное орудие;
один или несколько элементов износа, располагающихся на землеройном орудии;
один или несколько датчиков, обращенных в сторону одного или нескольких элементов износа землеройного орудия;
процессор, сообщающийся с одним или несколькими датчиками, причем процессор выполнен с возможностью:
получения данных с одного или нескольких датчиков;
генерирования трехмерного представления, по меньшей мере, части орудия с использованием данных, полученных с одного или нескольких датчиков;
сравнения сгенерированного трехмерного представления с ранее сгенерированным трехмерным представлением;
идентификации одного или нескольких таких событий, как износ и утрата одного или нескольких элементов износа, путем сравнения сгенерированного трехмерного представления с ранее сгенерированным трехмерным представлением; и
выдачи индикации об износе или утрате одного или нескольких элементов износа при идентификации такого износа или утраты.
[0049] В качестве экскаватора может быть использовано рабочее оборудование для земляных работ и землеройно-транспортное оборудование различных типов, включая, например, гусеничные экскаваторы, колесные одноковшовые погрузчики, гидравлические одноковшовые экскаваторы, канатные экскаваторы с электрическим приводом, ковши канатно-скреперных экскаваторов, канавокопатели с обратной лопатой, подземные погрузчики, роторные экскаваторы и прочие машины подобного рода.
[0050] Прочие признаки и преимущества настоящего изобретения станут очевидными после ознакомления с последующим подробным описанием.
Краткое описание фигур
[0051] Предпочтительные варианты осуществления настоящего изобретения будут подробнее описаны ниже исключительно для примера в привязке к прилагаемым чертежам, где:
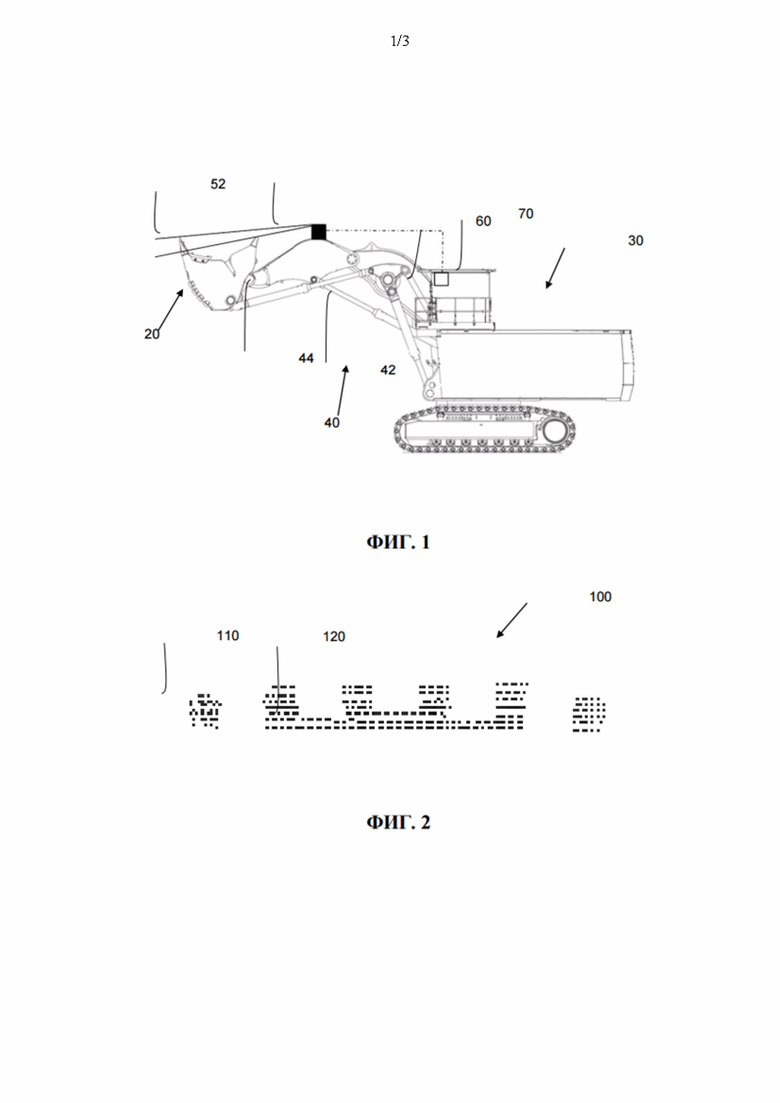
На фиг. 1 проиллюстрирована система отслеживания элементов износа землеройного орудия;
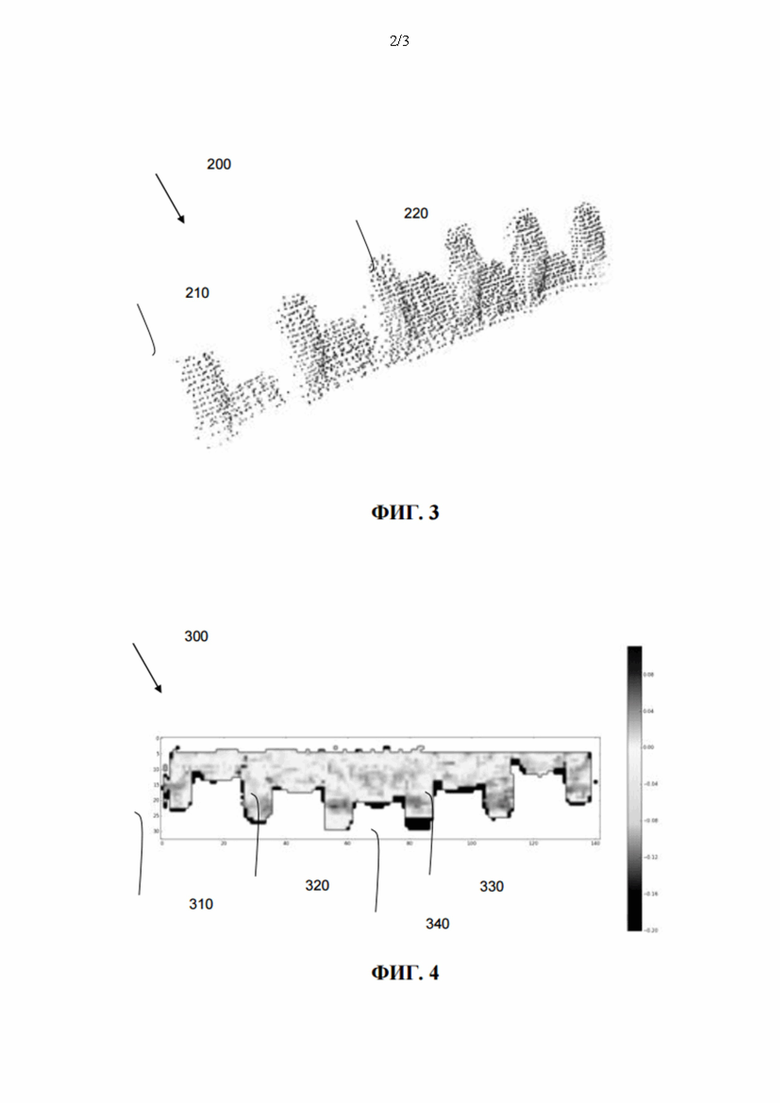
На фиг. 2 приведен пример данных с датчика землеройного орудия;
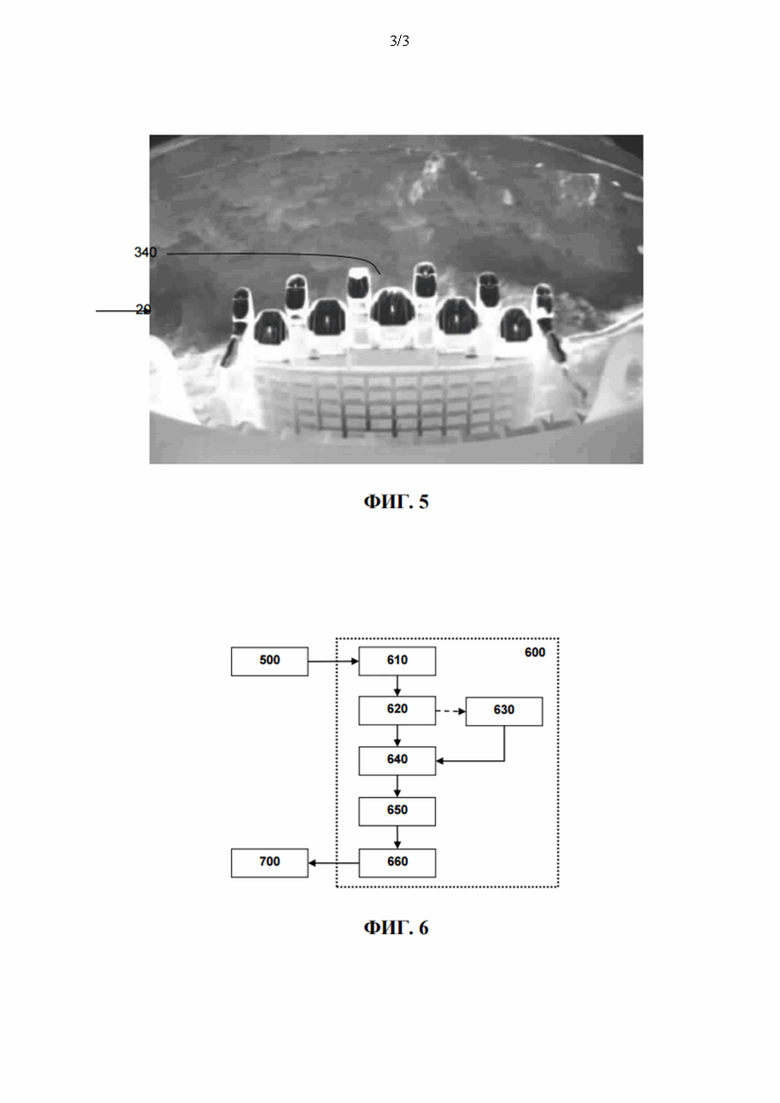
На фиг. 3 приведен пример схематического представления землеройного орудия, сгенерированного по данным с датчика;
На фиг. 4 визуализирован пример сравнения трехмерного представления землеройного орудия с ранее сгенерированным трехмерным представлением;
На фиг. 5 представлено тепловое изображение землеройного орудия, показанного на фиг.4; и
На фиг. 6 представлено схематическое изображение, иллюстрирующее один из примеров реализации системы отслеживания элементов износа.
Подробное раскрытие настоящего изобретения
[0052] На фиг. 1 проиллюстрирована система 10 отслеживания землеройного орудия 20 рабочего оборудования в виде экскаватора 30. Следует иметь в виду, что настоящее изобретение может применяться к транспортным средствам или рабочему оборудования других типов. Проиллюстрированный экскаватор 30 представляет собой экскаватор 30 гусеничного типа. Однако следует иметь в виду, что экскаватором 30 может служить машина иного типа, снабженная землеройным орудием 20, включая, например, колесные одноковшовые погрузчики, гидравлические одноковшовые экскаваторы, канатные экскаваторы с электрическим приводом, ковши канатно-скреперных экскаваторов, канавокопатели с обратной лопатой, подземные погрузчики, роторные экскаваторы и прочие машины подобного рода. Хотя проиллюстрированное орудие представлено землеройным орудием 20, следует также иметь в виду, что настоящее изобретение может применяться к орудиям других типов, в частности, к орудиям с заменяемыми изнашиваемыми деталями, таким как строительные орудия, производственные орудия, обрабатывающие инструменты или иные орудия подобного рода.
[0053] Экскаватор 30, проиллюстрированный на фиг. 1, снабжен подвижной штангой 40, включающей в себя стрелу 42 и рукоять 44. На подвижной штанге 40, в частности, на рукояти 44 подвижной штанги может быть установлен один или несколько датчиков 50, в поле 52 обзора которых находится, по меньшей мере, часть землеройного орудия 20. В зависимости от углов между валами подвижной штанги землеройное орудие 20 не всегда может находиться в поле 52 обзора датчика 50, и в предпочтительном варианте датчики установлены в определенном положении и направлены в сторону землеройного орудия таким образом, что землеройное орудие 20 перемещается в поле 52 его обзора в ходе выполнения обычных рабочих операций, например, во время выполнения операции по сбрасыванию в отвал.
[0054] Датчик 50 сообщается с процессором 60, который в предпочтительном варианте располагается на экскаваторе 30, а в еще более предпочтительном варианте - в кабине 70 экскаватора. Однако процессор 60 может также располагаться на удалении так, что данные с датчика 50 передаются за пределы транспортного средства на удаленный терминал. Процессор 60 может также располагаться на экскаваторе 30 таким образом, что обработанная информация, такая как результаты анализа или сигналы тревоги, передаются на удаленный терминал для дистанционного отслеживания и оценки.
[0055] Датчик 50 в предпочтительном варианте выполнен с возможностью сбора данных, отображающих трехмерную модель текущего состояния землеройного орудия 20, такую как, например, облако точек, облако вероятностей, поверхностная модель или иная модель подобного рода. В одном из предпочтительных вариантов своего осуществления датчик 50 представляет собой многослойный, времяпролетный, сканирующий лазерный дальномерный датчик (такой как, например, датчик SICK LD MRS-8000). Однако следует иметь в виду, что альтернативные датчики, которые также могут быть использованы, включают в себя, помимо прочего, системы стереоскопического зрения (работающие, как в видимом спектре, так и в любой другой области спектра, например, тепловизоры), структурированные трехмерные дальномерные системы на базе освещения (не времяпролетные), радар, ультразвуковые датчики и такие устройства, которые могут выводить структуру на основе пассивных или косвенных методов, например, детектирования диаграммы направленности излучения, создаваемой или модифицируемой землеройным орудием 20 (например, методом MRI или пассивного акустического анализа).
[0056] В одном из предпочтительных вариантов своего осуществления датчик 30 представляет собой одинарный трехмерный датчик, но следует также иметь в виду, что может применяться один или несколько не трехмерных датчиков, например, два или более двухмерных сканеров или трехмерных датчиков с ограниченным полем обзора, которые создают полную трехмерную модель в течение короткого периода времени. Примеры таких конфигураций включают в себя, помимо прочего, монокулярную структуру, состоящую из сенсорных систем, учитывающих движение, включая решения на базе камер событий, или пару двухмерных сканирующих лазерных дальномеров, ориентированных под определенным углом относительно друг друга (предпочтительно около 90°) так, что один датчик получает оценку движения путем отслеживания землеройного орудия, тогда как другой датчик собирает меняющиеся во времени векторные развертки землеройного орудия, которые затем сводятся в трехмерную модель с использованием данных оценки движения.
[0057] Вся площадь землеройного орудия, представляющая интерес, не может быть захвачена в ходе однократного сканирования или одним кадром датчика 50, но данные с датчика могут быть объединены с оценками движения, выведенными по данным с датчика по мере перемещения землеройного орудия 20 в поле 52 обзора датчика 50, для генерирования трехмерной модели.
[0058] В зависимости от местоположения датчика 50 скорее всего будет наблюдаться ожидаемый разброс упорядоченных данных о расстоянии, которые могут считаться приемлемыми, относительно данных, собираемых ближе или дальше от датчика 50, чем это позволяет обеспечить их надежную отбраковку. Эти данные могут быть обусловлены грязью, пылью, стенкой выработки или иными элементами, которые не являются релевантными частями землеройного орудия 20. Следовательно, процессор 60 может предварительно обрабатывать данные, полученные с датчика, методом селекции по дальности, что может существенно уменьшить количество данных, требующих комплексной обработки.
[0059] Могут быть также предусмотрены другие стадии предварительной обработки, зависящие от датчика. Например, для датчика SICK LDMRS-8000 может быть предусмотрено 50 многократных сканирований с использованием чересстрочной развертки с целью представления данных с более широким вертикальным полем обзора для анализа. Аналогичным образом для этого датчика может быть предусмотрена операция подавления шума на базе кластеризации точек. Могут быть использованы и другие стадии предварительной обработки, что зависит от типа, а в некоторых случаях даже марки используемого датчика 50.
[0060] Если соответствующие части землеройного орудия 20, подлежащего отслеживанию системой 10, не всегда находятся в поле зрения, то необходимо определить, когда начинать и останавливать сбор данных с датчика 50 для анализа процессором 60. Момент начала сбора релевантных данных может называться «триггерной» точкой или событием. Триггерная точка может быть идентифицирована путем анализа каждого кадра или сканированного изображения данных с датчика и определения отношения точек, находящихся там, где предполагается присутствие землеройного орудия 20, к точкам, где предполагается отсутствие землеройного орудия 20. Это отношение может сравниваться с заданным пороговым значением, предпочтительно с учетом известной геометрии землеройного орудия 20 или конечного автомата.
[0061] Например, в случае, когда анализируется ковш экскаватора, измерения по всему землеройному орудию 20 с одной стороны ковша до другой его стороны могут быть использованы для простого разделения данных с датчика на области, где предполагается получение большого объема данных (например, где располагаются элементы износа в виде зубьев), и на области, где предполагается получение меньшего объема данных (например, где располагаются элементы износа в виде защитных сегментов). Отношение этих точек может быть определено за счет выполнения относительно простой операции деления или с помощью более сложного алгоритма, такого как, например, нечетко-логическая операция «И» с использованием алгебраического произведения. Затем выполняется сравнение этого значения с пороговым значением, при котором сравнивается количество зубьев с количеством защитных сегментов, а также с предполагаемым полем обзора датчика в кадре, где можно видеть землеройное орудие 20, с целью получения отношения для сравнения.
[0062] С другой стороны, конечный автомат может содержать следующие состояния: элементы износа не видны; элементы износа видны частично; элементы износа видны полностью; элементы износа находятся частично за пределами поля обзора датчиков; и/или элементы износа находятся полностью за пределами поля обзора датчика. Определение состояния может основываться на эвристических правилах, согласно которым идентифицируются условия пространственного распределения трехмерных точек, соответствующие каждому состоянию. Оценка может быть также дополнена механизмом отклонения, который отбрасывает данные, указывающие на то, что элементы износа могут по-прежнему заслоняться, например, за счет их захождения в стенку выработки или закрытия материалом, который идентифицируется как не представляющий какого-либо интереса. Этот механизм отклонения может производить проверку на наличие пустых данных в пределах известных размеров орудия. Механизм отклонения может также проверять примерную форму (например, плоскую, сферическую или эллиптическую) орудия путем изучения результатов анализа главных компонент трехмерных точек.
[0063] На фиг. 2 приведен пример данных 100 с датчика 50 по одному кадру изображения части землеройного орудия 20 ковша (не показан), полученному сканирующим лазерным дальномером сразу после достижения триггерной точки. Данные 100 включают в себя четко идентифицируемые элементы износа в виде зубьев 110 и защитных сегментов 120. Хотя это и не очевидно выражено на фиг. 2, каждая точка содержит информацию о дальности относительно датчика 50, благодаря чему обеспечивается достаточный объем данных для генерирования трехмерного представления землеройного орудия 20.
[0064] Для повышения надежности может быть обеспечено сохранение буфера (предпочтительно кольцевого) данных с датчика до начала определения триггерной точки, и по сканированным изображения в этом буфере может быть выполнен последующий анализ, если только какое-либо конкретное сканированное изображение не было отбраковано по причине отсутствия целостности (например, недостатка точек данных, невозможности отслеживания ключевых признаков, используемых для создания трехмерной модели, и т.п.).
[0065] Хотя это и не имеет существенного значения, множество наборов данных с датчика 50 предпочтительно объединяются в течение относительно коротких отрезков времени для создания более эффективного трехмерного представления землеройного орудия 20. Для большинства мест расположения датчика 50, способов считывания и сфер применения этой технологии можно предположить, что землеройное орудие 20 будет видно не все время, и что данные с датчика будут варьироваться по своему качеству вследствие, например, шума в сигналах, временных помех (таких как, например, пыль или извлекаемый материал) и текущих погодных условий (например, тумана или дождя). Соответственно, целесообразно объединять множество наборов данных с датчика 50 в течение заданного отрезка времени для обеспечения лучшего представления землеройного орудия 20, чем при использовании одного набора данных. В одном из предпочтительных вариантов осуществления используются данные с датчика в отношении единичного отвального движении. Это определяется размерами буфера и триггерным событием, а также возможностью «фиксации» движения на землеройном орудии 20 при обработке данных в ходе отслеживания движения. Если в течение заданного периода времени не принимаются какие-либо новые данные, то может быть запущено событие обработки данных.
[0066] Для объединения множества наборов данных с датчика в единую модель может быть использован способ считывания с соответствующим трехмерным, разбитым на объемные элементы (вокселы), представлением. В одном из предпочтительных вариантов, в котором используется сканирующий лазерный дальномер, может быть использована вокселизация на базе сферических кадров, которая кодирует описание с эффектом трассировки лучей. Множественные точки из разных сканированных изображений, которые входят в один и тот же воксел, сводятся в одну точку с помощью соответствующей статистической модели (такой как, например, медианная модель). Разрешение модели может определяться, исходя из требуемой точности воспроизведения результатов измерения износа или утраты и возможностей датчика 50 в процессе его использования. В альтернативном варианте данные могут сразу объединяться в двумерное изображение с координатной сеткой с аналогичным статистическим слиянием данных из множества сканированных изображений. Может быть использована статистическая модель, например, интегральная средняя. Показатели могут быть также улучшены с помощью других статистических моделей, например, с применением одномерного фильтра Калмана.
[0067] На фиг. 3 приведен пример трехмерного представления 200 землеройного орудия 20, созданного путем объединения множества наборов трехмерных данных с датчика, измеренных в отношении единичного отвального движения с использованием вокселизации сферических координат. Представление 200 включает в себя четко идентифицируемые элементы износа в виде зубьев 210 и защитных сегментов 220. Сразу после генерирования трехмерного представления 200 оно может быть подвергнуто сравнению с ранее сгенерированным трехмерным представлением. Текущее трехмерное представление 200 предпочтительно также сохраняется с тем, чтобы его можно было использовать в качестве ранее сгенерированного трехмерного представления при выполнении таких сравнений в будущем.
[0068] С течением времени в ходе эксплуатации землеройного орудия 20 собирается множество его трехмерных представлений. В зависимости от установочной конфигурации датчика 50 эти представления могут собираться в общей системе координат, благодаря определенному расположению датчика 50 и землеройного орудия 20 относительно друг друга. В противном случае они могут находиться в разных системах пространственных координат или не могут быть легко совмещены для сравнения. В таких случаях собранные трехмерные представления 200 моделей землеройного орудия 20 предпочтительно преобразуются таким образом, чтобы они были совмещены в общей системе координат, обеспечивая возможность выполнения точного сравнения процессором 60.
[0069] Для выравнивания множества трехмерных представлений 200 таким образом, чтобы они были совмещены в общей системе координат, могут быть использованы самые разные подходы. Предпочтительный подход предполагает использование опорного трехмерного представления 200 и выравнивание всех остальных трехмерных представлений 200 по этому опорному представлению. Это опорное трехмерное представление может представлять собой просто первое трехмерное представление, сгенерированное во время или после пуска, или какое-либо иное представление, сгенерированное на любой стадии технологического процесса при условии, что оно используется надлежащим образом.
[0070] Выравнивание предпочтительно выполняется с использованием процесса ICP (итеративного алгоритма ближайших точек). Процесс ICP предпочтительно имеет ограничения в отношении предполагаемых степеней свободы. Например, ковш гидравлического экскаватора с прямой лопатой может перемещаться только в двух измерениях и вращаться вокруг одной оси относительно датчика 50, установленного на рукояти 44. Другим примером алгоритма выравнивания служит вычисление матрицы дробно-линейного преобразования, основанной на согласовании ключевых точек между опорным представлением и промежуточными представлениями в пространстве двухмерного изображения, дополненное стадией соответствующей нормализации цвета для выравнивания по дальности или вращения вокруг неограниченной оси.
[0071] Другим примером подходящего алгоритма выравнивания служит процесс NDT (преобразования нормальных распределений). Еще один пример подходящего алгоритма выравнивания предусматривает выравнивание в два этапа: сначала путем применения механизма грубого выравнивания, такого как вращение, определяемое выравниванием в соответствии с заданной системой координат по главной оси облака точек, определяемой методом анализа главных компонент (РСА), вместе с переносом на основе центроидов, границ, статистических или иных геометрических признаков; а затем путем последующего применения механизма точного выравнивания, например, применения процесса ICP или NDT.
[0072] После выравнивания (в случае необходимости) процессор 60 сравнивает только что сгенерированное трехмерное представления, по меньшей мере, с одним ранее сгенерированным трехмерным представлением. Это сравнение служит, главным образом, для детектирования изменений в землеройном орудии 20 в течение заданного периода времени. Существенное изменение в трехмерном представлении 200 землеройного орудия 20 в течение относительно короткого отрезка времени, например, между отвальными движениями, указывает на событие утраты или поломки землеройного орудия 20. Менее существенное изменение в течение более продолжительного периода времени указывает на абразивный износ землеройного орудия 20.
[0073] В одном из предпочтительных вариантов трехмерные представления 200 преобразуются в двумерную карту дальностей с использованием методов обработки изображений, таких как, например, наложение декартовой системы координат на трехмерную модель и проецирование измерений дальности, полученных по модели, на пару осей декартовой системы координат и выделение цветом каждого пикселя в соответствии со значением дальности по третьей, перпендикулярной оси. К изображению могут быть применены дополнительные операции фильтрации, например, открывающего/замыкающего или расширяющего/сужающего характера, для заполнения пробелов, обусловленных помехами, или для общего повышения качества изображения иным образом. Для дополнительного уменьшения воздействия переходных шумов может также использоваться объединение изображений в течение соответствующих периодов времени, например, смещение среднего изображений в окне длительностью всего несколько минут или удаление пикселей, которые наблюдаются только в небольшой части изображений.
[0074] Затем процессор 60 сравнивает изображения по переменным временным разверткам. Например, при выполнении операции вычитания изображений высвечиваются отличия в изображениях. Эти сравнения могут выполняться для детектирования событий износа и утраты в течение периодов времени, выделенных для объекта, представляющего интерес. Например, при сравнении текущего изображения с последним предыдущим изображением высвечиваются существенные изменения состояния землеройного орудия 20, которые указывают на событие утраты или поломки землеройного орудия 20. При сравнении изображения, созданного в небольшом окне скользящего среднего, например, всего с несколькими событиями отвала, с аналогичным изображением, полученным накануне или даже еще раньше, износ землеройного орудия 20 должен бросаться в глаза, как по глубине (цвету) изображения разницы, так и по изменению границы признаков землеройного орудия 20 в изображении разницы.
[0075] На фиг. 4 визуализирован пример 300 сравнения трехмерного представления землеройного орудия с ранее сгенерированным трехмерным представлением в формате двумерного изображения. Изображение 300 разницы представления включает в себя четко идентифицируемые элементы износа в виде зубьев 310 и защитных сегментов 320. В этом примере предусмотрен относительно продолжительный период времени между сравниваемыми представлениями, где можно видеть как износ в виде относительно небольших темных участков 330 по периметру элементов износа, так и утрату вершины зуба в виде относительно более крупного темного блока 340 одного из зубьев 310. Видимым также является износ по глубине. На фиг. 5 представлено тепловое фотографическое изображение землеройного орудия 20, показанного на фиг.4, иллюстрирующее утрату 340 вершины зуба, выделенную в изображении 300 разницы.
[0076] После сравнения процессор 60 может идентифицировать износ и/или утрату землеройного орудия 20. Процесс такой идентификации может быть выбран таким образом, чтобы он подходил для отслеживаемого землеройного орудия 20 и требуемого типа определения. В одном из предпочтительных вариантов осуществления, в котором определение заключается в том, чтобы идентифицировать износ и/или утрату, по меньшей мере, части проиллюстрированного землеройного орудия 20, к изображению разницы может быть применен процесс свертки изображения с ядром, масштабированным и взвешенным надлежащим образом. В альтернативном варианте к изображению разницы может быть применен алгоритм подсчета количества строк пикселей.
[0077] Применение сверточного фильтра к изображению разницы выполняется с использованием квадратного ядра с линейно возрастающим весом в направлении от границы к центру. Размер ядра выбирается таким образом, чтобы он был примерно таким же, что и размер объекта, утраты которого можно обоснованно ожидать, или немного больше при преобразовании в пиксели через масштабирование и разрешение изображения разницы. Для идентификации утраты или величины износа и установления местоположения зоны износа или утраты используется анализ величины, полученной в результате операции свертки. Эта величина сравнивается с заданным пороговым значением или адаптивной пороговой величиной. Один из примеров заданного порогового значения может основываться на части максимально возможного результата в случае серьезной утраты. Оно может быть скорректировано вручную для изменения чувствительности детектирования. Один из примеров адаптивной пороговой величины может основываться на сравнении значения в динамике по времени и выявлении изменений значения, которые указывали бы на статистические выбросы, или на методике машинного обучения, в которой пороговая величина определяется через обратную связь с оператором в отношении точности детектирования.
[0078] Изображение, используемое для сравнения, предпочтительно делится на вертикальные зоны, соответствующие предполагаемому местоположению зубьев и защитных сегментов, исходя из заданной геометрической модели землеройного орудия 20, которая обычно определяется знанием его геометрии. Такое зонирование предпочтительно выполняется автоматически, например, с использованием алгоритма обнаружения границ элементов изображения и контроля признаков по существу вертикальных линий.
[0079] Для каждой вертикальной зоны, начиная с края изображения, примыкающего к вершинам зубьев, и выполняя построчную итерацию в направлении к основанию зубьев, предпочтительно подсчитывается каждая смежная строка пиксельных значений в изображении разницы, которые указывают на ее отсутствие в самой последней модели при ее сравнении с более ранней моделью. Количество пропущенных строк для каждого пикселя сравнивается с любым известным пороговым значением, таким как, например, заданное пороговое значение или адаптивная пороговая величина.
[0080] Один из примеров заданного порогового значения может основываться на разнице между длиной полностью изношенного элемента землеройного орудия 20, когда он установлен на рабочем органе, и длиной рабочего органа или крепежа без элемента землеройного орудия 20, преобразованной в пиксели через масштабирование и разрешение изображения разницы. Примеры адаптивных пороговых величин могут основываться на сравнении значения в динамике по времени и выявлении изменений в этом значении, которые могут указывать на статистические выбросы, или на методике обучения, в которой пороговая величина определяется через обратную связь с оператором в отношении точности детектирования.
[0081] После выявления износа или утраты процессор 60 выдает индикацию такого износа или утраты. Эти выходные данные могут быть представлены в самых разных формах, но в предпочтительном варианте выходные данные содержат сигнал тревоги для направления уведомления об идентифицированном событии износа или утраты. В предпочтительном варианте уведомление направляется, по меньшей мере, оператору рабочего оборудования 30.
[0082] Помимо простого уведомления об износе или утрате процессор 60 предпочтительно выполнен с возможностью идентификации и выдачи индикации о любых других полезных выявленных характеристиках, например, идентификации возникновения чрезмерного износа (например, более быстрого, чем ожидалось, износа, по меньшей мере, части землеройного орудия 20). Это может быть реализовано путем сравнения пикселей или групп пикселей, включая движущиеся и накладывающиеся окна пикселей, в изображениях разницы, построенных по переменным временным разверткам, с некоторыми заданными базовыми показателями, указывающими на приемлемую интенсивность износа. Приемлемая интенсивность износа может быть предусмотрена или для всего землеройного орудия 20, или для конкретных частей землеройного орудия 20, таких как, например, один или несколько конкретных элементов износа.
[0083] Прочие полезные уведомления могут генерироваться по результатам многомерной и пространственной корреляции с данными, полученными от других систем. Например, интенсивность износа может коррелировать с извлекаемым материалом одного или нескольких типов, временем суток, водителем машины и пр. Такие уведомления могут оказаться полезными для интерпретационного анализа, например, за счет предоставления системе вспомогательных входных данных для автоматического детектирования изменений в свойствах извлекаемого материала.
[0084] Выходные данные могут включать в себя сигнал тревоги. Например, сигнал тревоги может быть выдан при детектировании события утраты землеройного орудия 20.
Может быть предусмотрен интерфейс пользователя. На такой интерфейс пользователя может подаваться сигнал тревоги для оператора рабочего оборудования 30. Выходные данные могут также передаваться на другие системы рабочего оборудования, включая системы управления рабочим оборудованием 30. Примеры того, каким образом сигналы тревоги могут передаваться оператору, включают в себя, помимо прочего, передачу одного или нескольких таких сигналов, как акустический сигнал тревоги, визуальный сигнал тревоги и тактильный сигнал тревоги обратной связи. Сигналы тревоги предпочтительно проводят различие между событиями износа и утраты. Выходные данные предпочтительно также информируют оператора о том, какая часть землеройного орудия 20 идентифицирована как утраченная или изношенная. Такая информация предпочтительно также доступна через интерфейс прикладного программирования и/или цифровой выход для ее использования другими системами, такими как система управления, или в ходе выполнения удаленных операций.
[0085] Может быть предусмотрена система идентификации транспортных средств, предпочтительно система на базе радиочастотной идентификации (RFID), или глобальная система позиционирования (GPS), или система контроля транспортных средств (FMS), которая может использовать комплекс методов, например, FMS для грузовиков. С помощью такой системы идентификации транспортных средств может быть идентифицировано сопряженное транспортное средство, такое как, например, транспортная машина, в которую загружается материал, извлекаемый рабочим оборудованием 30. При возникновении события утраты элемента землеройного орудия 20 система идентификации транспортных средств может быть использована для идентификации транспортного средства, которое с наибольшей вероятностью содержит утраченную часть землеройного орудия 20.
[0086] Процессор 60 может быть также выполнен с возможностью предоставления предыстории отслеживания. Такая предыстория отслеживания позволяет оператору просматривать информацию изображения разницы, трехмерные модели, данные или изображения с самих датчиков 50 (в соответствующих случаях, в зависимости от способа считывания) и/или изображения с соседних датчиков (таких как тепловизор), чтобы помочь оператору идентифицировать текущее состояние землеройного орудия 20 и/или изменения в состоянии за предшествующие периоды. Такая предыстория отслеживания может быть использована для анализа события утраты, благодаря чему ручная обработка данных за предыдущие периоды может быть использована для компенсации системой каких-либо задержек при детектировании. Например, более низкая частота ложных сигналов тревоги может быть достигнута путем расширения окна усреднения и периодов сравнения за счет возможно более продолжительной задержки между фактически имеющим место и идентифицируемым системой событием утраты элемента землеройного орудия 20.
[0087] Процессор может быть также выполнен с возможностью передачи данных. Данные предпочтительно передаются на удаленный терминал. Такие данные могут включать в себя одно или несколько трехмерных представлений землеройного орудия 20, информацию об изображении разницы и сигналы тревоги. Такие данные предпочтительно пересылаются с рабочего оборудования 30 на удаленный сервер или в облачную среду для дополнительной обработки, анализа, отслеживания и/или составления отчетов. Удаленный сервер или облачная среда может дополнять локальный процессор рабочего оборудования или даже выполнять определенную обработку данных вместо локального процессора на рабочем оборудовании. Примеры некоторых показателей, которые могут быть извлечены из такой информации, включают в себя оценку интенсивности износа и срока службы землеройного орудия 20. Такая информация может быть дополнена информацией из других источников, такой как, например, удельная энергия копания и экономические ограничения или показатели и цены на части землеройного орудия для получения рекомендаций в отношении периодов замены землеройных орудий 20, или же она может быть присоединена в качестве входных данных для других систем, таких как, например, системы автоматической подачи заказов на землеройные орудия 20. Процессор может быть выполнен с возможностью получения входных данных от оператора рабочего оборудования, указывающих на факт возникновения события износа или утраты. После получения таких входных данных может быть проведен анализ и/или удаленно передано соответствующее уведомление. Это уведомление может быть использовано для оповещения о необходимости проведения техобслуживания рабочего оборудования. Такой подход «по требованию» может означать, что для орудия рабочего оборудования могут быть предусмотрены более длительные интервалы между техническими осмотрами.
[0088] Помимо определения износа или утраты процессор может быть выполнен с возможностью определения момента времени, когда элемент износа должен быть заменен, путем выявления положительных, а не негативных изменений в изображении разницы. Такая информация может быть использована для определения срока службы изнашиваемых деталей и/или схем замены. Анализ изображения разницы также может быть использован для распознавания формы изнашиваемой детали. Это может быть использовано для идентификации изнашиваемой детали, находящейся в использовании, с целью определения предпочтений и/или действий оператора. Может проводиться анализ пригодности, при котором можно определить характеристики износа и/или утраты идентифицированных элементов износа. После проведения анализа пригодности могут быть выданы рекомендации по замене конкретных элементов износа.
[0089] На фиг.6 приведено схематическое изображение, иллюстрирующее один из примеров реализации системы отслеживания элементов износа, которая включает в себя датчики 500, процессор 600 и вывод 700. Процессор 600 выполнен с возможностью: получения данных, относящихся к землеройному орудию 20, с одного или нескольких датчиков на стадии 610; генерирования трехмерного представления, по меньшей мере, части орудия с использованием полученных данных на стадии 620; сравнения сгенерированного трехмерного представления с ранее сгенерированным трехмерным представлением 630 на стадии 640; идентификации одного или нескольких таких событий, как износ и утрата, по меньшей мере, части землеройного орудия путем сравнения сгенерированного трехмерного представления с ранее сгенерированным трехмерным представлением на стадии 650; и выдачи 700 индикации об износе или утрате на стадии 660 в случае идентификации износа или утраты, по меньшей мере, части землеройного орудия.
[0090] Настоящее изобретение обеспечивает преимущество, состоящее в том, что им предлагается система 10 отслеживания и соответствующий способ для идентификации утраченных и изношенных элементов износа землеройного орудия 20. Это может повысить производительность, поскольку землеройные работы с поврежденными землеройными орудиями 20, например, с изношенными или отсоединенными элементами износа, по умолчанию менее эффективны. Более того, идентификация события утраты в землеройном орудии 20 обеспечивает возможность быстрой замены утраченного элемента, что предотвращает возникновение других потенциальных проблем на рабочей площадке, таких как повреждение сопутствующего оборудования.
[0091] Система 10 отслеживания также предусматривает режим планово-предупредительного ремонта, благодаря чему элементы износа землеройного орудия 20 могут отслеживаться и заменяться при достижении ими заданного состояния износа во избежание незапланированного простоя.
[0092] В предпочтительном варианте трехмерное представление землеройного орудия 20 может быть создано и зафиксировано в соответствующей системе координат. При этом обеспечивается преимущество, состоящее в том, что алгоритм может не зависеть от способа считывания, используемого для создания представления. Путем объединения множества моделей в течение коротких отрезков времени может быть уменьшен шум в трехмерном представлении. Два трехмерных представления, сгенерированные в разные моменты времени путем относительно простой в вычислительном отношении операции вычитания (такой как, например, вычитание изображения дальности), могут выделить различия в состоянии землеройного орудия 20 в период времени между сбором соответствующих наборов данных. Повторение этой операции в переменном масштабе времени может быть использовано для детектирования разных масштабов износа и получения разной степени восприимчивости к серьезным изменениям (таким как, например, событие утраты).
[0093] Следует иметь в виду, что предложенные система и способ могут быть применены к любому землеройному орудию 20, например, для отслеживания изнашиваемых деталей, установленных на ковшах, канавокопателе с обратной лопатой, одноковшовом экскаваторе с прямой лопатой, колесном одноковшовом погрузчике, роторном ковшовом экскаваторе и буровых установках.
[0094] В зависимости от варианта осуществления требуются минимальные, если они имеются, знания предшествующего уровня техники о геометрии землеройного орудия 20. Выходные данные могут быть представлены в относительно простом формате (таком как, например, дальностная картина различий), который может запрашиваться с использованием стандартных методов обработки изображений для получения большого объема сведений о состоянии землеройного орудия 20 в сравнении, например, с относительно простыми линейными измерениями длины зуба. Выходные данные могут быть также без труда объединены с другими источниками данных для существенного повышения полезности измерения с целью получения более глубоких знаний о землеройном орудии 20. Система и способ обеспечивают высокую степень надежности за счет низкой, и обычно легко регулируемой, частоты ложных сигналов тревоги. Выходные данные могут быть также представлены в формате, пригодном для оповещения оператора и внешнего отслеживания и/или компактного отображения информации.
[0095] Прилагательные, встречающиеся в настоящем документе, такие как «первый» и «второй», «левый» и «правый», «верхний» и «нижний» и прочие прилагательные подобного рода, могут быть использованы исключительно для того, чтобы можно было отличить один элемент или действие от другого элемента или действия, не требуя или не подразумевая, что на практике такое соотношение или порядок обязательно должен быть таким, как это указано. Там, где это допускается контекстом, ссылка на целое число, компонент или стадию (и тому подобное) не должна трактоваться как ограниченная только одним целым числом, компонентом или стадией, а может предусматривать одно или несколько целых чисел, компонентов или стадий и т.п.
[0096] Приведенное выше описание различных вариантов осуществления настоящего изобретения предназначено для специалистов в данной области техники. При этом не предполагается, что оно носит исчерпывающий характер или ограничивает заявленное изобретение единственным вариантом его осуществления. Как было указано выше, для специалистов в данной области техники очевидны многочисленные альтернативные варианты реализации настоящего изобретения и возможность внесения в него самых разных изменений. Соответственно, хотя были описаны некоторые конкретные альтернативные варианты осуществления заявленного изобретения, специалистам в данной области техники очевидны или ими могут быть относительно легко разработаны иные варианты осуществления. Предполагается, что настоящее изобретение охватывает все альтернативные варианты осуществления, модификации и изменения, внесенные в заявленное изобретение, которые представлены в настоящем документе, а также другие варианты его осуществления, которые соответствуют сущности и объему описанного выше изобретения.
[0097] В настоящем документе предполагается, что термины «содержит», «содержащий», «включает в себя», «включающий в себя» или иные термины подобного рода означают неисключительное включение, а это означает, что способ, система или устройство, содержащее перечисленные элементы, не включает в себя исключительно эти элементы, а может также включать в себя и другие элементы, не входящие в перечень.
Изобретение относится к системе и способу отслеживания орудия рабочего оборудования, предпочтительно землеройного орудия, содержащего элементы износа, такого как ковш экскаватора. Технический результат заключается в возможности контроля износа орудия рабочего оборудования. Система содержит один или несколько датчиков, установленных на рабочем оборудовании и обращенных в сторону орудия, и процессор, выполненный с возможностью получения данных, относящихся к орудию, с одного или нескольких датчиков; генерирования трехмерного представления, по меньшей мере, части орудия с использованием полученных данных; сравнения сгенерированного трехмерного представления с ранее сгенерированным трехмерным представлением; идентификации одного или нескольких таких событий, как износ и утрата, по меньшей мере, части орудия путем сравнения сгенерированного трехмерного представления с ранее сгенерированным трехмерным представлением, причем процессор выполнен с возможностью генерирования трехмерного представления путем выравнивания множества трехмерных моделей методом совмещения трехмерных моделей в общей системе координат, причем генерирование трехмерного представления, по меньшей мере, части орудия с использованием данных, полученных с одного или нескольких датчиков, предусматривает использование процессора, выполненного с возможностью сбора множества векторных разверток в течение определенного периода времени с целью генерирования трехмерного представления с использованием данных оценки движения, причем данные оценки движения выводятся из данных, полученных от одного или нескольких датчиков по мере перемещения орудия в поле обзора одного или нескольких датчиков. 3 н. и 54 з.п. ф-лы, 6 ил.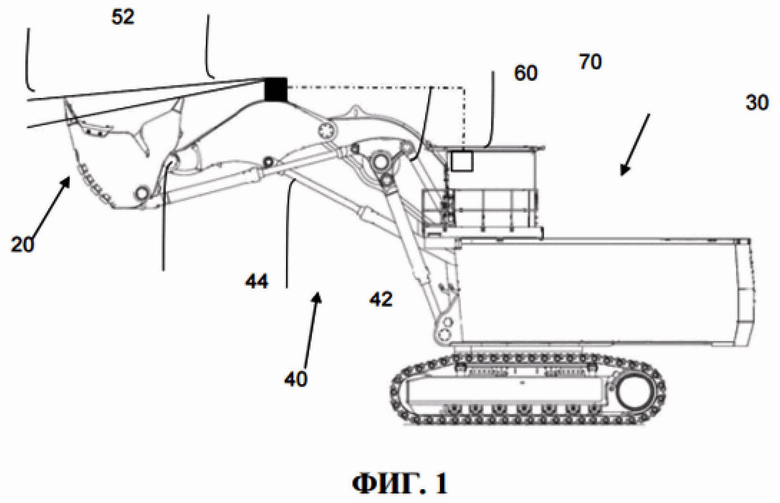
1. Система отслеживания орудия рабочего оборудования, причем эта система включает в себя:
один или несколько датчиков, установленных на рабочем оборудовании и обращенных в сторону орудия; и
процессор, выполненный с возможностью:
получения данных, относящихся к орудию, с одного или нескольких датчиков;
генерирования трехмерного представления, по меньшей мере, части орудия с использованием полученных данных;
сравнения сгенерированного трехмерного представления с ранее сгенерированным трехмерным представлением;
идентификации одного или нескольких таких событий, как износ и утрата, по меньшей мере, части орудия путем сравнения сгенерированного трехмерного представления с ранее сгенерированным трехмерным представлением,
причем процессор выполнен с возможностью генерирования трехмерного представления путем выравнивания множества трехмерных моделей методом совмещения трехмерных моделей в общей системе координат, причем
генерирование трехмерного представления, по меньшей мере, части орудия с использованием данных, полученных с одного или нескольких датчиков, предусматривает использование процессора, выполненного с возможностью сбора множества векторных разверток в течение определенного периода времени с целью генерирования трехмерного представления с использованием данных оценки движения, причем данные оценки движения выводятся из данных, полученных от одного или нескольких датчиков по мере перемещения орудия в поле обзора одного или нескольких датчиков.
2. Система отслеживания по п. 1, в которой орудие представляет собой землеройное орудие с заменяемыми изнашиваемыми частями.
3. Система отслеживания по п. 1 или 2, в которой один или несколько датчиков включают в себя по меньшей мере один датчик, выполненный с возможностью получения данных, отображающих трехмерную форму поверхности орудия.
4. Система отслеживания по п. 3, в которой один или несколько датчиков включают в себя многослойный, времяпролетный, сканирующий лазерный дальномерный датчик.
5. Система отслеживания по п. 3, в которой один или несколько датчиков включают в себя двумерный датчик, обеспечивающий достаточное количество двухмерных данных для выведения трехмерной формы поверхности орудия.
6. Система отслеживания по любому из предшествующих пп. 1-5, в которой процессор выполнен с возможностью объединения данных с датчиков, считываемых разными способами и обладающих разной точностью воспроизведения и/или характеристиками по шуму, с целью генерирования трехмерного представления.
7. Система отслеживания по п. 6, в которой процессор выполнен с возможностью объединения данных с использованием комбинаторного алгоритма.
8. Система отслеживания по любому из предшествующих пп. 1-7, в которой один или несколько датчиков располагаются на рабочем оборудовании таким образом, что землеройное орудие находится на линии их прямой видимости.
9. Система отслеживания по п. 8, в которой один или несколько датчиков, установленных на рабочем оборудовании, располагаются на подвижной штанге рабочего оборудования.
10. Система отслеживания по любому из предшествующих пп. 1-9, в которой процессор выполнен с дополнительной возможностью предварительной обработки данных, полученных с одного или нескольких датчиков, перед генерированием трехмерного представления.
11. Система отслеживания по п. 10, в которой предварительная обработка предусматривает селекцию по дальности.
12. Система отслеживания по п. 10 или 11, в которой предварительная обработка предусматривает множественные сканирования с использованием чересстрочной развертки.
13. Система отслеживания по п. 1, в которой выравнивание предусматривает использование процесса ICP (итеративного алгоритма ближайших точек) или NDT (преобразования нормальных распределений).
14. Система отслеживания по любому из предшествующих пп. 1-13, в которой выравнивание предусматривает определение матрицы дробно-линейного преобразования.
15. Система отслеживания по любому из предшествующих пп. 1-14, в которой процессор выполнен с дополнительной возможностью преобразования сгенерированного трехмерного представления в двухмерные данные о дальности.
16. Система отслеживания по п. 15, в которой процессор выполнен с дополнительной возможностью сравнения сгенерированного трехмерного представления с ранее сгенерированным трехмерным представлением путем сравнения двухмерных данных о дальности.
17. Система отслеживания по п. 15 или 16, в которой процессор выполнен с дополнительной возможностью идентификации одного или нескольких таких событий, как износ и утрата, по меньшей мере, части орудия путем анализа результата сравнения двумерных изображений, которые включают в себя двухмерные данные о дальности.
18. Система отслеживания по п. 17, в которой анализ предусматривает создание изображения разницы, разделенного на отдельные зоны, которые соответствуют зонам орудия, представляющим интерес.
19. Система отслеживания по п. 18, в которой изображение разницы делится на отдельные зоны, исходя из заданной геометрической модели орудия и/или анализа методом обнаружения границ элементов изображения.
20. Система отслеживания по любому из предшествующих пп. 17-19, в которой анализ предусматривает измерение изменений в изображении разницы в каждой зоне путем определения количества пикселей и/или применения процесса свертки изображения.
21. Система отслеживания по любому из предшествующих пп. 17-20, в которой анализ предусматривает подавление шума с использованием маски изображения, что предотвращает проведение анализа части изображения, признанной нерелевантной.
22. Система отслеживания по любому из предшествующих пп. 1-21, в которой процессор выполнен с возможностью выдачи индикации износа или утраты части орудия.
23. Система отслеживания по любому из предшествующих пп. 1-22, дополнительно включающая в себя систему идентификации транспортных средств, содержащую один или несколько датчиков, обеспечивающих идентификацию сопряженного транспортного средства при установлении факта утраты, по меньшей мере, части орудия.
24. Система отслеживания по любому из предшествующих пп. 1-23, в которой процессор выполнен с дополнительной возможностью регистрации и/или передачи координат глобальной навигационной спутниковой системы (GNSS) при идентификации утраты, по меньшей мере, части орудия.
25. Способ отслеживания одного или нескольких элементов износа орудия рабочего оборудования, причем этот способ предусматривает:
получение данных, относящихся к орудию, с одного или нескольких датчиков, установленных на рабочем оборудовании;
генерирование трехмерного представления, по меньшей мере, части орудия с использованием данных, полученных с одного или нескольких датчиков, причем генерирование трехмерного представления осуществляют путем выравнивания множества трехмерных моделей методом совмещения трехмерных моделей в общей системе координат;
сравнение сгенерированного трехмерного представления с ранее сгенерированным трехмерным представлением; и
идентификацию одного или нескольких таких событий, как износ и утрата, по меньшей мере, части орудия, исходя из результата выполнения стадии сравнения, причем
генерирование трехмерного представления, по меньшей мере, части орудия с использованием данных, полученных с одного или нескольких датчиков, предусматривает использование процессора, выполненного с возможностью сбора множества векторных разверток в течение определенного периода времени с целью генерирования трехмерного представления с использованием данных оценки движения, причем данные оценки движения выводятся из данных, полученных от одного или нескольких датчиков по мере перемещения орудия в поле обзора одного или нескольких датчиков.
26. Способ по п. 25, в котором орудие представляет собой землеройное орудие, содержащее элементы износа, а стадия идентификации одного или нескольких таких событий, как износ и утрата, по меньшей мере, части землеройного орудия предусматривает идентификацию одного или нескольких таких событий, как износ и утрата, по меньшей мере, элементов износа орудия.
27. Способ по п. 25 или 26, в котором стадия получения данных, относящихся к орудию, с одного или нескольких датчиков предусматривает получение трехмерных данных, относящихся, по меньшей мере, к части орудия.
28. Способ по любому из предшествующих пп. 25-27, дополнительно предусматривающий предварительную обработку данных с датчика до начала выполнения стадии генерирования трехмерного представления.
29. Способ по п. 28, в котором предварительная обработка предусматривает множественные сканирования с использованием чересстрочной развертки.
30. Способ по любому из предшествующих пп. 25-29, дополнительно предусматривающий стадию определения того, что землеройное орудие находится по существу в пределах поля обзора одного или нескольких датчиков.
31. Способ по п. 30, в котором стадия оценки того, что орудие находится в поле обзора одного или нескольких датчиков, предусматривает идентификацию того, указывают ли данные с датчика на то, что в выбранных точках орудие идентифицировано как присутствующее или отсутствующее.
32. Способ по п. 30 или 31, в котором стадия оценки того, что орудие находится в поле обзора одного или нескольких датчиков, предусматривает определение отношения точек, в которых предполагается нахождение орудия, к точкам, в которых предполагается отсутствие орудия.
33. Способ по любому из предшествующих пп. 30-32, в котором стадия оценки того, что орудие находится в поле обзора одного или нескольких датчиков, предусматривает сравнение указанного отношения с заданным пороговым значением, исходя из известной геометрии орудия.
34. Способ по любому из предшествующих пп. 25-33, дополнительно предусматривающий стадию объединения множества наборов данных с датчика, полученных в разное время, в единую трехмерную модель.
35. Способ по п. 34, в котором стадия объединения множества наборов данных с датчика предусматривает объединение данных с датчика в течение определенного периода времени, начиная с того момента, когда было установлено, что орудие находится по существу в поле обзора одного или нескольких датчиков.
36. Способ по п. 34 или 35, в котором стадия объединения предусматривает вокселизацию данных с датчика.
37. Способ по п. 25, в котором стадия выравнивания предусматривает использование процесса ICP (итеративного алгоритма ближайших точек) или NDT (преобразования нормальных распределений).
38. Способ по любому из предшествующих пп. 25-37, в котором стадия выравнивания предусматривает определение матрицы дробно-линейного преобразования.
39. Способ по п. 38, в котором матрица дробно-линейного преобразования основывается на согласовании ключевых точек между опорной моделью и промежуточными моделями.
40. Способ по любому из предшествующих пп. 25-39, дополнительно предусматривающий преобразование трехмерного представления в двухмерные данные о дальности.
41. Способ по п. 40, в котором стадия преобразования в двухмерные данные о дальности предусматривает создание изображения путем выбора плоскости трехмерного представления и индикации данных о дальности, перпендикулярных указанной плоскости, с разными характеристиками изображения.
42. Способ по п. 41, дополнительно предусматривающий фильтрацию двумерного изображения путем применения одного или нескольких открывающих/замыкающих и расширяющих/сужающих фильтров и уменьшение шума путем объединения множества двумерных изображений в течение определенного периода времени.
43. Способ по п. 41 или 42, в котором стадия сравнения сгенерированного трехмерного представления с ранее сгенерированным трехмерным представлением предусматривает сравнение двумерных изображений, которые включают в себя данные о дальности.
44. Способ по любому из предшествующих пп. 41-43, в котором стадия сравнения предусматривает сравнение двумерных изображений по переменным временным разверткам.
45. Способ по п. 44, в котором переменная временная развертка включает в себя первую временную развертку, которая короче второй временной развертки.
46. Способ по любому из предшествующих пп. 41-45, дополнительно предусматривающий стадии создания изображения разницы и деления изображения разницы на отдельные зоны, которые соответствуют зонам орудия, представляющим интерес.
47. Способ по п. 46, в котором зоны, представляющие интерес, включают в себя предполагаемое местоположение элементов износа орудия.
48. Способ по п. 47, в котором орудие представляет собой землеройное орудие, а элементами износа служит один или несколько таких элементов, как зубья, адаптеры, защитные сегменты и вкладыши.
49. Способ по любому из предшествующих пп. 46-48, в котором изображение разницы делится на отдельные зоны, исходя из заданной геометрической модели орудия и/или результатов анализа методом обнаружения границ элементов изображения.
50. Способ по п. 49, в котором стадия сравнения дополнительно предусматривает стадию измерения изменений в изображении разницы в каждой выделенной зоне.
51. Способ по п. 50, в котором измерение изменений в изображении разницы в каждой зоне предусматривает выполнение стадии определения количества пикселей путем подсчета смежных пикселей и/или применения процесса свертки.
52. Способ по п. 51, в котором стадия подсчета смежных пикселей предусматривает подсчет пикселей в строках, а количество пикселей, подсчитанных в строке, сравнивается с пороговым значением для индикации того, имеет ли место износ и/или утрата.
53. Способ по любому из предшествующих пп. 25-52, дополнительно предусматривающий стадию выдачи индикации износа или утраты, по меньшей мере, части орудия после выполнения стадии идентификации одного или нескольких таких событий, как износ и утрата, по меньшей мере, части орудия, в ходе которой был идентифицирован такой износ или утрата.
54. Способ по п. 53, в котором стадия выдачи индикации износа или утраты предусматривает выдачу сигнала тревоги оператору рабочего оборудования и/или передачу одного или несколько следующих видов информации: индикации утраты, износа и сигнала тревоги на удаленный терминал.
55. Способ по п. 53 или 54, дополнительно предусматривающий стадию использования индикации износа или утраты в системах управления рабочим оборудованием для адаптации его работы.
56. Способ по любому из предшествующих пп. 25-55, дополнительно предусматривающий стадию идентификации сопряженного транспортного средства при индикации события утраты.
57. Система отслеживания элементов износа для орудия рабочего оборудования, причем эта система включает в себя:
один или несколько датчиков, установленных на рабочем оборудовании, которое снабжено орудием, находящимся в считывающем поле обзора; и
процессор, выполненный с возможностью реализации способа по любому из предшествующих пп. 25-56.

