Изобретение относится к самоходным транспортным средствам, а именно к роботизированным мобильным самоходным платформам с поддержкой модульного сопряжения между собой и с дополнительным оборудованием [B25J5/00, B25J9/00, B62D61/00, B62D63/00, B62D63/02, B62D63/04, B62D63/08].
Из уровня техники известно МОБИЛЬНОЕ РОБОТОТЕХНИЧЕСКОЕ УСТРОЙСТВО [RU195456 (U1), опубликовано: 29.01.2020], содержащее платформу, установленную на четырех колесах для перемещения по опорной поверхности, два из которых выполнены ведущими и оснащены каждый отдельным электроприводом на базе электродвигателя постоянного тока, а два других колеса выполнены ведомыми рояльного типа с возможностью вращения на 360°, диаметр ведущих колес превышает диаметр ведомых колес, а также размещенные и закрепленные на платформе блок автономного питания с аккумуляторной батареей, блок управления движением платформы на базе компьютеризированных средств, включающих в себя датчики фиксирования препятствий, средство фотовидеофиксации, размещенное на опорной стойке, закрепленной на платформе, и связанное с блоком беспроводной связи, отличающееся тем, что платформа выполнена в виде горизонтально располагаемой пластины, диаметр ведущих колес выполнен больше расстояния от опорной поверхности до платформы и расположены по бокам платформы, электродвигатели постоянного тока закреплены под платформой, ведомые колеса расположены под платформой и на расстоянии друг от друга, меньшем расстояния между ведущими колесами, блок управления дополнительно включает блок контроля линии перемещения с аналоговыми датчиками, выполненными с функцией определения изменения черного цвета на белый.
Недостатком аналога является выполнение аналога без средств зацепления с дополнительным оборудованием, позволяющим расширить функциональность устройства.
Также известен СПОСОБ И УСТРОЙСТВО ВЗАИМОДЕЙСТВИЯ РОБОТОВ [CN111845924 (A), опубликовано: 30.10.2020], отличающийся тем, что он включает этапы распознавания положения поддона, первой транспортной тележки и второй транспортной тележки, для чего на торцах поддона предусмотрены первая соединительная пластина на одном торце поддона и вторая соединительная пластина на другом торце поддона, первая транспортная тележка содержит в верхней ее части первый фиксирующий механизм, соответствующий первой соединительной пластине, а на второй транспортной тележке расположен второй фиксирующий механизм, соответствующий второй соединительной пластине, средства распознавания положения идентифицируют соединительные пластины первой транспортной тележкой и второй транспортной тележкой с помощью радиочастотной идентификационной метки на одной стороне первой соединительной пластины и второй соединительной пластины и радиочастотного идентификатора на первой транспортной тележке и второй транспортной тележке, когда первая транспортная тележка и вторая транспортная тележка перемещаются к поддону их положение будет идентифицировано радиочастотным идентификатором относительно поддона первой соединительной пластины и второй соединительной пластины, после завершения идентификации первая транспортная тележка и вторая транспортная тележка будет двигаться к обоим сторонам поддона по заданной траектории;
фиксация поддона после определения правильного положения первой транспортной тележки и второй транспортной тележки при подходе к обозначенным позициям первой соединительной пластиной и второй соединительной пластиной через фиксирующий механизм, смонтированным на первой транспортной тележке и второй транспортной тележке, при этом для удобства перемещения поддона по высоте в конструкции поддона предусмотрен электрический домкрат;
когда вторая транспортная тележка и вторая соединительная пластина зафиксированы, то подается сигнал по беспроводному каналу связи на первую транспортную тележку и главный контроллер от которого получают пункт назначения транспорта, первая транспортная тележка посылает сигнал запуска второй транспортной тележке, вторая транспортная тележка запускается и толкает поддон и вторую транспортную тележку, первая транспортная тележка движется, и в течение всего процесса транспортировки, поскольку вторая транспортная тележка больше по размеру и может перевозить аккумулятор большей емкости, вторая транспортная тележка выполняет функцию основного источника питания, первая транспортная тележка подключена к главному контроллеру через беспроводную сеть для управления, когда транспортировка завершена, вторая транспортная тележка и первая транспортная тележка автоматически возвращаются в зону разгрузки где находится поддон.
Недостатком аналога является низкая функциональность тележки, обусловленная возможностью зацепления с первой тележкой только поддона и второй тележки, при этом зацепление второй тележки возможно исключительно через поддон.
Наиболее близкой по технической сущности является ИНТЕЛЛЕКТУАЛЬНАЯ ТЕЛЕЖКА-МАНИПУЛЯТОР И СПОСОБ УПРАВЛЕНИЯ ЕЮ [CN108436907 (A), опубликовано: 24.08.2018], отличающаяся тем, что она содержит механизм захвата, механизм подъема и умную тележку, механизм захвата расположен над механизмом подъема, а между ними расположена верхняя панель, а механизм подъема установлен над умной тележкой и между ними смонтирована нижняя плита, механизм захвата включает пневматический захват, манипулятор, ящик для материала и инфракрасный сканер, ящик для материала размещен на верхней плите, манипулятор установлен на переднем конце ящика с материалом, пневматический захват соединен с манипулятором, а инфракрасный сканер установлен на монтажном отверстии пневматического захвата с помощью винтового крепления, умная тележка включает в себя систему управления, монтажную пластину, сигнальную лампу, передатчик сигнала, полосу предотвращения столкновений, зуммер, зарядный порт, лазерный датчик, монтажную пластину лазерного датчика, модуль планирования пути, монтажная пластина устанавливается на одной стороне платформы тележки с помощью винтового крепления, сигнальная лампа устанавливается на монтажное отверстие монтажной пластины, передатчик сигнала устанавливается на другое монтажное отверстие монтажной пластины, а полоса предотвращения столкновений наклеивается на край тележки.
Основной технической проблемой прототипа является его низкая функциональность, обусловленная ограниченными возможностями тележки из-за особенности конструкции, где предусмотрен лишь манипулятор и контейнер для перевозимого материала. Кроме того, алгоритм управления тележкой прототипом сложен из-за применяемых для управления узлов.
Задача изобретения состоит в устранении недостатков прототипа.
Технический результат изобретения заключается в обеспечении возможности создания модульной роботизированной тележки, позволяющей расширить функциональные возможности тележки и автоматизировать производственные и логистические процессы.
Указанный технический результат достигается за счет того, что роботизированная модульная тележка, содержащая кузов на самоходном электрическом колесном шасси, навесное оборудование, смонтированное на тележке, тягово-сцепное устройство тележки, главный контроллер, модуль связи и модуль технического зрения с возможностью контроля окружающей обстановки и корректировки траектории движения,
отличающийся тем, что колесное шасси выполнено в виде независимых приводных колес, расположенных по противоположным бортам тележки каждое из которых снабжено сервомотором, питание сервомотора выполнено от блока аккумуляторных батарей, смонтированном внутри кузова тележки, при этом блок аккумуляторных батарей подключен к контроллеру питания, а управление сервомоторами приводных колес, в том числе для их раздельного включения, обеспечения вращения в разные стороны или вращения с разными угловыми скоростями для поворота роботизированной модульной тележки осуществляется с помощью главного контроллера, к которому также подключен контроллер питания, к главному контроллеру подключен интерфейсный модуль, выполненный с возможностью взаимодействия с человеком, при этом интерфейсный модуль включает в себя входные регистры и интерфейсы для подключения периферийных устройств, тягово-сцепные устройства выполнены жесткими и смонтированными в передней и задней частях тележки, при этом в одной части тележки смонтирован корпус тягово-сцепного устройства, а в противоположной части смонтирован кронштейн тягово-сцепного устройства с возможностью взаимозацепления двух роботизированных модульных тележек или зацепления тележки с дополнительным навесным и/или транспортируемым оборудованием, таким как прицепы, стеллажи, грузоподъемное оборудование, снабженные ответными элементами тягово-сцепных устройств, в передней и задней частях тележки смонтированы разъемы для электрического подключения стыкующихся роботизированных модульных тележек между собой и электрического подключения к тележке дополнительного оборудования, при этом при объединении двух и более тележек, главный контроллер одной из тележек становится основным главным контроллером для всего ряда подключенных тележек, главные контроллеры остальных тележек переходят в ждущий режим, к главному контроллеру подключен коммутационный модуль расширения для подключения через упомянутый модуль сервоприводов дополнительного оборудования.
В частности, кузов тележки выполнен рамным.
В частности, шасси тележки может содержать поддерживающие опорные колеса, смонтированные в противоположной приводным колесам части тележки, обеспечивающие устойчивое положение тележки на плоскости.
В частности, опорные колеса могут быть выполнены поворотными для обеспечения поворота тележки при движении, для чего упомянутые опорные колеса смонтированы на единой платформе, которая шарнирно смонтирована в нижней части кузова тележки, а поворот упомянутой платформы обеспечивается отдельным сервомотором.
В частности, блок аккумуляторных батарей расположен в нижней части тележки по центру с возможностью обеспечения устойчивости тележки.
В частности, к главному контроллеру может быть подключен модуль связи, выполненный с возможностью удаленного управления главным контроллером, приема и передачи информации.
В частности, к главному контроллеру подключен акселерометр для определения скорости движения тележки.
В частности, к главному контроллеру подключен гироскоп для определения положения тележки в пространстве.
В частности, модуль технического зрения может быть выполнен в виде лидара или фото/видео камеры.
В частности, тягово-сцепные устройства выполнены в виде европетли, автосцепки.
В частности, элементы тягово-сцепного устройства в передней и задней частях тележки могут быть снабжены датчиками взаимного распознавания, подключенные к главному контроллеру для быстрого и точного зацепления тягово-сцепных устройств двух тележек между собой или тележки и дополнительного оборудования, стыкуемого к тележке в автоматическом режиме.
В частности, датчики взаимного распознавания выполнены индуктивными, фотоэлектрическими, емкостными, инфразвуковыми или в виде радиодатчиков.
В частности, ответные элементы тягово-сцепного устройства дополнительного оборудование снабжены датчиками взаимного распознавания.
В частности, дополнительные элементы, подключаемые к главному контроллеру через коммутационный модуль расширения выполнены для измерения параметров окружающей среды и наблюдения за окружающей обстановкой, обнаружения препятствий.
В частности, дополнительное навесное оборудование выполнено в виде манипулятора, выполненного в виде механической руки из шарнирно соединенных между собой элементов и снабженных сервоприводами, в виде ленточного или роликового конвейера с приводами от сервоприводов для обеспечения забора/выгрузки продукции с конвейерных линий или с возможностью образования гибкой конвейерной линии при соединении нескольких роботизированных модульных тележек между собой, в виде вил, снабженных сервоприводами, для транспортировки поддонов, в виде контейнера или стеллажей для перевозки груза.
В частности, дополнительное транспортируемое оборудование выполнено в виде прицепа или стеллажей для перевозки груза.
В частности, снаружи кузов тележки снабжен пассивными или активными буферными антиударными элементами.
В частности, снаружи кузов оборудован световыми приборами, выполненными с возможностью сигнализации о работе и движении тележки и приборами освещения.
Краткое описание чертежей.
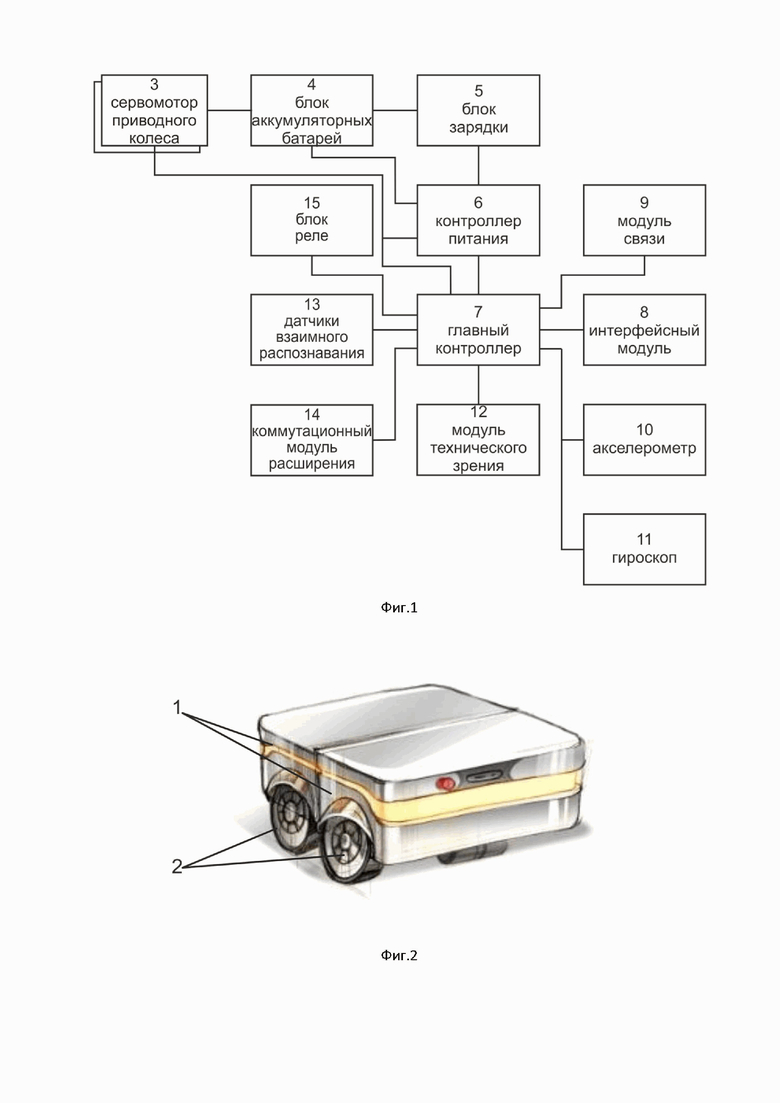
На фиг.1 показана блок-схема роботизированной модульной тележки.
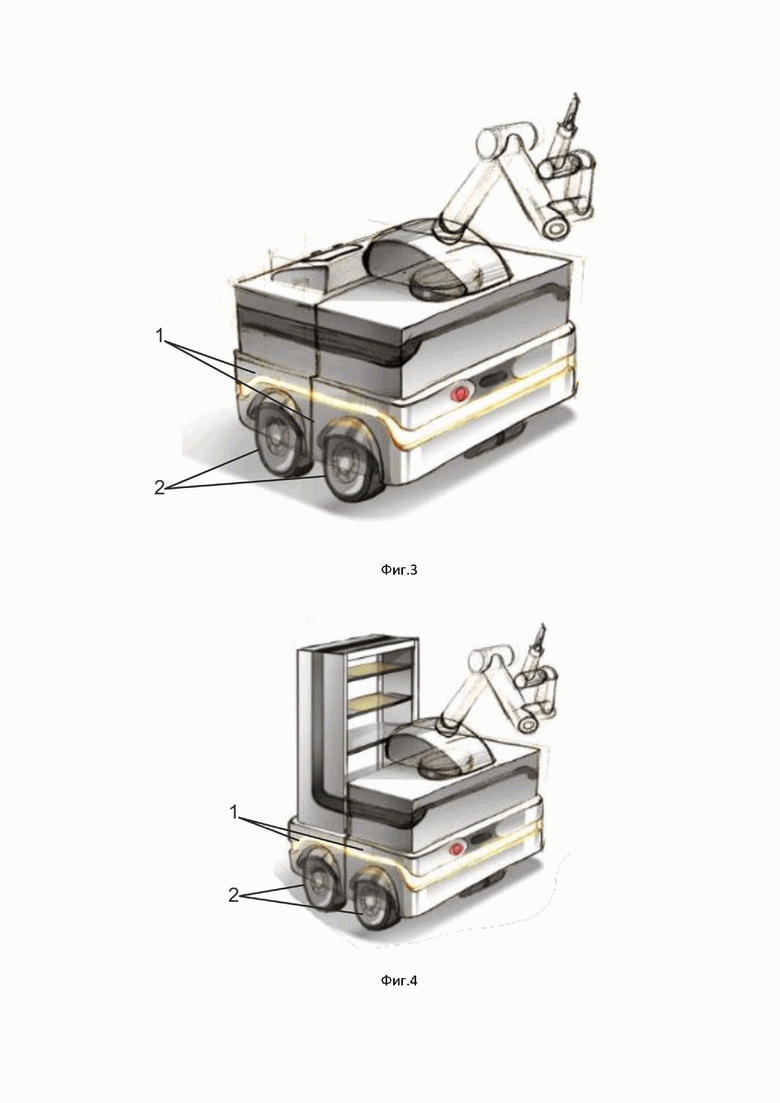
На фиг.2 показаны две роботизированные модульные тележки, соединенные между собой.
На фиг.3 показаны две соединенные между собой роботизированные модульные тележки с манипулятором.
На фиг.4 показаны две соединенные между собой роботизированные модульные тележки с манипулятором и стеллажом.
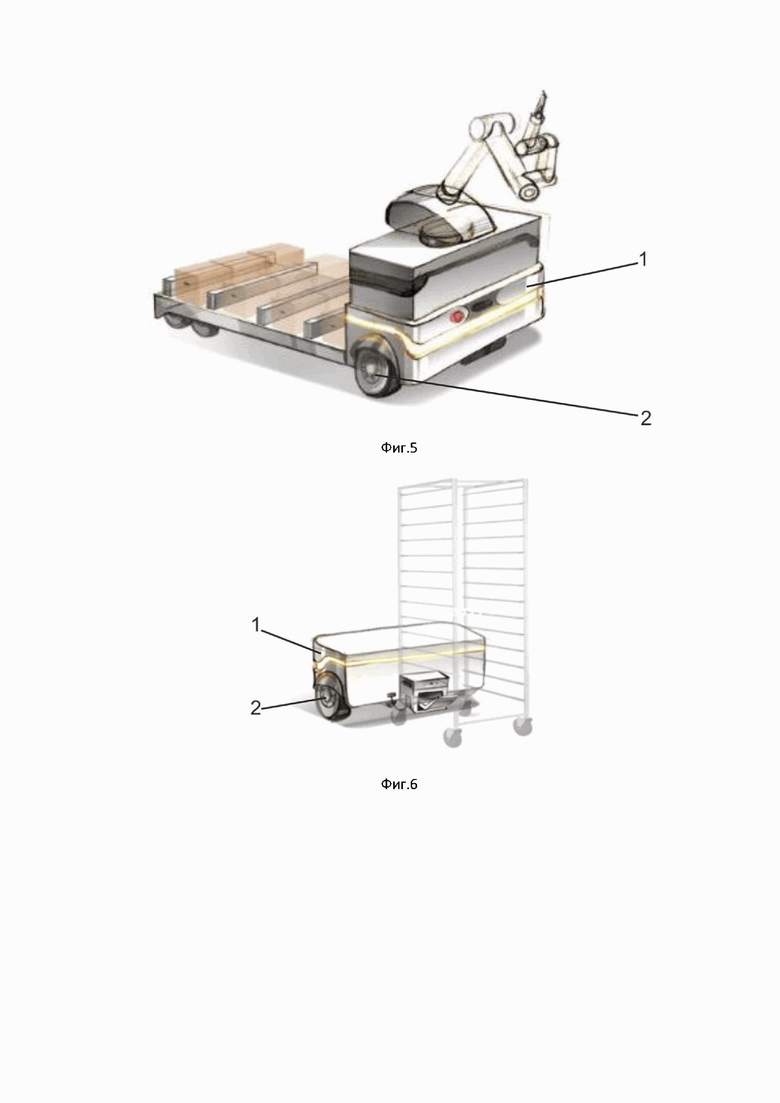
На фиг.5 показана роботизированная модульная тележка с манипулятором и прицепом.
На фиг.6 показана роботизированная модульная тележка со стеллажом.
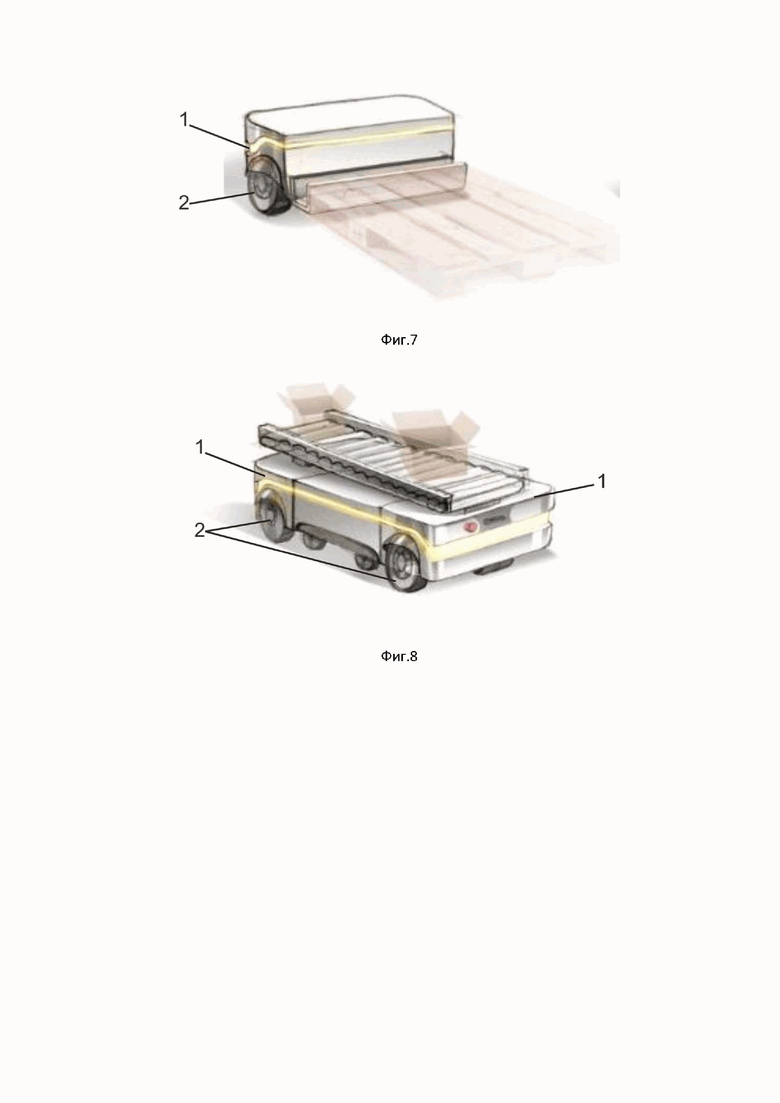
На фиг.7 показана роботизированная модульная тележка, оборудованная вилами для транспортировки поддонов.
На фиг.8 показаны две соединенные между собой роботизированные модульные тележки, оборудованные конвейером.
На фигурах обозначено: 1 - кузов, 2 - приводные колеса, 3 - сервомоторы, 4 - блок аккумуляторных батарей, 5 - блок зарядки, 6 - контроллер питания, 7 - главный контроллер, 8 - интерфейсный модуль, 9 - модуль связи, 10 - акселерометр, 11 - гироскоп, 12 - модуль технического зрения, 13 - датчики взаимного распознавания, 14 - коммутационный модуль расширения, 15 - блок реле.
Осуществление изобретения.
Роботизированная модульная тележка содержит кузов 1 (см.Фиг.2-8), снабженный колесным шасси. Кузов может быть выполнен рамным. Шасси модульной тележки содержит, по крайней мере, пару независимых приводных колес 2, расположенных по противоположным бортам тележки в передней или задней ее части и поддерживающие опорные колеса (на фигурах не показаны), смонтированные в противоположной приводным колесам 2 части тележки, обеспечивающие устойчивое положение тележки на плоскости. Каждое из приводных колес 2 снабжено своим сервомотором 3 (см.Фиг.1), питание которого выполнено от блока аккумуляторных батарей 4, смонтированном внутри кузова 1 тележки в ее нижней части по центру с возможностью обеспечения устойчивости тележки. Блок аккумуляторных батарей 4 снабжен блоком зарядки 5. Блок аккумуляторных батарей 4 и блок зарядки 5 подключены к контроллеру питания 6.
В одном из вариантов реализации опорные колеса могут быть выполнены поворотными для обеспечения поворота тележки при движении, при этом для чего упомянутые опорные колеса смонтированы на единой платформе (на фигурах не показана), которая шарнирно смонтирована в нижней части кузова тележки 1, а поворот упомянутой платформы обеспечивается отдельным сервомотором (на фигурах не показан).
Управление сервомоторами 3 приводных колес 2, в том числе для их раздельного включения, обеспечения вращения в разные стороны или вращения с разными угловыми скоростями для поворота роботизированной модульной тележки осуществляется с помощью главного контроллера 7, к которому также подключен контроллер питания 6. К главному контроллеру 7 подключен интерфейсный модуль 8, выполненный с возможностью взаимодействия с человеком и / или внешними устройствами. Интерфейсный модуль 8 включает в себя входные регистры, интерфейсы для подключения различных цифровых приборов, стандартных периферийных устройств (клавиатуры, монитора, сенсорных дисплеев, накопителей, джойстика и т.п.). К главному контроллеру 7 также может быть подключен модуль связи 9, выполненный с возможностью удаленного управления главным контроллером 7, приема и передачи информации.
Роботизированная модульная тележка снабжена акселерометром 10, гироскопом 11 и другими устройствами (блок GSM, лидар и т.д.), подключенными к главному контроллеру 7 для определения скорости движения и положения тележки в пространстве.
Снаружи в передней части кузова на роботизированной модульной тележке смонтирован модуль технического зрения 12, выполненный, например, в виде лидара или видео камеры. Модуль технического зрения 12 выполнен с возможностью контроля окружающей обстановки и корректировки траектории движения тележки.
Роботизированная модульная тележка снабжена жесткими тягово-сцепными устройствами, смонтированными в передней и задней частях тележки. Тягово-сцепные устройства выполнены, например, в виде европетли, автосцепки и т.д., при этом в одной части тележки, например, передней, смонтирован корпус тягово-сцепного устройства (замок), а с противоположной стороны тележки, в данном случае, задней, смонтирован кронштейн тягово-сцепного устройства (головка) с возможностью взаимозацепления двух роботизированных модульных тележек тягово-сцепными устройствами друг к другу. Кроме того, тягово-сцепное устройство выполнено с возможностью зацепления к тележке дополнительного оборудования, такого как, тележек, стеллажей и т.д.
Элементы тягово-сцепного устройства в передней и задней частях тележки могут быть снабжены датчиками взаимного распознавания 13, подключенные к главному контроллеру 7 для быстрого и точного зацепления тягово-сцепных устройств двух тележек между собой или тележки и дополнительного оборудования, стыкуемого к тележке в автоматическом режиме. Датчики взаимного распознавания могут быть выполнены индуктивными, фотоэлектрическими, емкостными, инфразвуковыми или в виде радиодатчиков. Аналогичные датчики смонтированы и на дополнительном оборудовании, которое может стыковаться к роботизированной модульной тележке.
В передней и задней частях роботизированной модульной тележки смонтированы разъемы для электрического подключения стыкующихся роботизированных модульных тележек между собой или подключения к тележке дополнительного оборудования, при этом при объединении двух и более тележек главный контроллер 7 одной из тележек, преимущественно первой или последней, становится основным главным контроллером для всего ряда подключенных роботизированных модульных тележек, а главные контроллеры 7 остальных тележек переходят в ждущий режим.
К главному контроллеру 7 подключен коммутационный модуль расширения 14 для подключения через упомянутый модуль 14 дополнительных элементов, таких как, датчиков газа/дыма, температуры, видеокамер, микрофонов, парктроников и т.д., выполненных с возможностью измерения параметров окружающей среды, а также наблюдения за окружающей роботизированную модульную тележку обстановкой, а также обнаружения препятствий и передачи полученной с помощью упомянутых дополнительных элементов информации от главного контроллера 7 через модуль связи 9 в центр управления.
Роботизированная модульная тележка может быть снабжена различным навесным и/или транспортируемым оборудованием, а также их сочетанием:
манипулятором, выполненным в виде механической руки из шарнирно соединенных между собой элементов и снабженных сервоприводами (см. Фиг.3-5);
ленточным или роликовым конвейером с приводами от сервоприводов для обеспечения забора/выгрузки продукции с конвейерных линий или с возможностью образования гибкой конвейерной линии при соединении нескольких платформ между собой (см.Фиг.8);
вилами, снабженных сервоприводами, для транспортировки стандартных поддонов (см.Фиг.7);
контейнером для перевозки, кузовом, стеллажами и т.д., в том числе выполненными отдельно и стыкующимися с роботизированной модульной ячейкой (см.Фиг.3-6).
Манипулятор смонтирован, преимущественно, на самой роботизированной тележке и может применяться в дополнении со второй роботизированной тележкой, соединенной с первой, при этом на второй роботизированной тележке может быть смонтирован контейнер для перевозки материалов, которые загружаются в контейнер и выгружаются из него манипулятором.
Для снабжения роботизированной тележки ленточным или роликовым конвейером между двумя роботизированными тележками, при их совместном использовании, может быть установлена дополнительная платформа, как показано на фиг.8.
Сервоприводы дополнительного оборудования подключаются к главному контролеру 7 через коммутационный модуль расширения 14.
Снаружи кузов 1 роботизированной модульной тележки снабжен пассивными или активными буферными антиударными элементами (на фигурах не показаны).
Кузов 1 роботизированной модульной тележки оборудован световыми приборами, выполненными с возможностью сигнализации о работе и движении тележки, например, ходовыми огнями, стоп-сигналами, указателями направления движения (поворота) и приборами освещения (фарами). Монтаж световых приборов в кузове 1 тележки выполнен заподлицо с возможностью их защиты при ударе об окружающие предметы. Световые приборы подключены к главному контроллеру 7 через блок реле 15.
Модульность роботизированной тележки заключается в возможности построения системы, состоящей из нескольких роботизированных тележек или, по крайней мере, одной тележки и одного или нескольких вариантов дополнительного оборудования, обеспечивающих выполнение различных задач. Модульность тележки позволяет изменять ее функциональные возможности и применять комплект, состоящий из одной тележки и дополнительного навесного и/или транспортировочного оборудования для решения широкого круга задач с привлечением или без привлечения оператора, что в свою очередь обеспечивает автоматизацию процессов на производстве и в логистике, снижает трудозатраты и трудоемкость выполняемых задач. Комплект поставки модульной роботизированной тележки зависит от круга решаемых задач.
Роботизированная модульная тележка используется следующим образом.
Роботизированная модульная тележка может работать как автономно, по предварительно записанному в память главного контроллера 7 с помощью интерфейсного модуля 8 или через центр управления, заданию, так и вручную, по командам, поступающих от оператора на главный контроллер 7 через интерфейсный модуль 8 или через модуль связи 9 от центра управления. Кроме того, управление роботизированной модульной ячейкой может быть реализовано на уровне системы промышленного интернета вещей.
Оператор включает главный контроллер 7 роботизированной модульной тележки. После включения главный контроллер 7 осуществляет самодиагностику подключенного оборудования и определяет с помощью контроллера питания 6 уровень заряда блока аккумуляторных батарей 4. Зарядка блока аккумуляторных батарей 4 роботизированной модульной тележки осуществляется на зарядной станции подключением с помощью блока зарядки 5 при критично низком заряде или для превентивной подзарядки.
Тактический уровень управления роботизированной модульной ячейкой реализуют на уровне цехового транспорта с помощью главного контроллера 7 и подключенного к нему модуля технического зрения 12, а также акселерометра 10 и гироскопа 11 для чего оператор создает карты цеха (цехов), загружает их в память главного контроллера 7, на которых указывает точки маршрутов, остановок, поворотов по которым осуществляется навигация и последовательность прохождения этих точек, а также запасные маршруты (отрезки маршрута), в том числе из каждой точки и зарядные станции и маршруты движения к ним. Также оператор заблаговременно или после запроса главного контроллера 7 задает задание на актуальный маршрут.
После включения роботизированной модульной ячейки и проведения главным контроллером 7 самодиагностики главный контроллер по последним сохраненным телеметрическим данным, полученным от модуля технического зрения 12, акселерометра 10 и гироскопа 11 определяет место своего положения. Далее, главный контроллер 7 проверяет наличие загруженного задания на актуальный маршрут, а в случае отсутствия его в памяти главного контроллера 7 запрашивает его у оператора путем формирования запроса с помощью интерфейсного модуля 8 или в центр управления.
Далее, роботизированная модульная тележка, согласно полученному заданию, перемещается в начальную точку маршрута, выполняет указанные в задании действия, например, загрузку, выгрузку, стыковку, отстыковку и т.д., зависящие от варианта реализации роботизированной модульной ячейки.
При стыковке роботизированной модульной тележки с аналогичной тележкой или с дополнительным оборудованием, выполненным с возможностью стыковки с упомянутой тележкой с помощью взаимных элементов тягово-сцепного устройства, которым снабжена тележка/тележки и дополнительное оборудование, при их приближении с помощью датчиков взаимного распознавания 13, подключенных к главному контроллеру 7 движущейся тележки и аналогичных датчиков 13, смонтированных на стыкуемом оборудовании (аналогичной тележке), контроллер 7 корректирует положение тележки до полного соединения элементов тягово-сцепных устройств.
В варианте реализации роботизированной модульной тележки с манипулятором или вилами при наличии соответствующего задания осуществляют с помощью этого манипулятора или вилами загрузку/выгрузку или перемещение груза, при этом могут осуществлять в контейнер, кузов, на стеллаж, аналогичную тележку, в том числе на указанное дополнительное оборудование, соединенное с описываемой роботизированной модульной тележкой.
В варианте реализации роботизированной модульной тележки с ленточным или роликовым конвейером при наличии соответствующего задания тележка может составлять конвейерную линию в ряду с аналогичными тележками, или стационарной конвейерной линией, или индивидуально.
Роботизированная модульная тележка проходит заданный маршрут по указанным на нем точкам, осуществляет повороты, развороты, остановки, непрерывно контролируя окружающую обстановку на предмет возможности проезда и выполнения маневров движения на маршруте и уточняя свое положение в пространстве с помощью органа технического зрения 12 с использованием данных, полученных от акселерометра 10 и гироскопа 11. Маршрут может содержать серию промежуточных точек, на которых тележка следовать через эти точки или выполнять действия, предусмотренные заданием.
Для упрощения реализации ориентирования и определения положения роботизированной модульной тележкой точки маршрута движения могут быть снабжены специальными метками с возможностью считывания их органом технического зрения 12.
при возникновении на маршруте движения роботизированной модульной тележки препятствия, определенного органом технического зрения 12, тележка останавливается и главный контроллер 7 при превышении незапланированной остановки времени задержки, запрограммированной в главном контролере 7, по заранее заданному алгоритму осуществляет объезд этого препятствия. Этот алгоритм может быть реализован различными способами, например, роботизированная модульная тележка возвращается в последнюю пройденную точку маршрута и объезжает препятствие по запасному маршруту (отрезку) или роботизированная модульная ячейка с помощью модуля технического зрения определяет размеры препятствия и ширину свободной от препятствия проезжей части и в случае наличия возможности объезда препятствия главный контроллер 7 принимает решение на проезд по свободной от препятствия проезжей части. В случае невозможности объезда препятствия, в том числе из-за отсутствия запасного маршрута, главный контроллер 7 посылает оповещает об этом оператора посредством интерфейсного модуля 8 или через модуль связи 9 в центр управления.
При достижении конечной точки маршрута роботизированная модульная ячейка завершает выполнение задания и переходит в режим ожидания в случае достаточного уровня заряда блока аккумуляторных батарей 4 или перемещается к ближайшей зарядной станции.
В варианте реализации управления вручную оператор в режиме реального времени управляет с помощью интерфейсного модуля 8 или через центр управления роботизированной модульной ячейкой, проходя каждую точку спланированного маршрута и осуществляя операции погрузки/выгрузки, перемещения, стыковки, отстыковки и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ СБОРА, РАЗДЕЛЕНИЯ, НАКОПЛЕНИЯ И УТИЛИЗАЦИИ ДОННЫХ ЗАГРЯЗНЕНИЙ | 2023 |
|
RU2815037C1 |
| СПОСОБ СЛИВА И НАЛИВА РЕЗЕРВУАРОВ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА И РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2024 |
|
RU2834081C1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| Автоматическая мобильно-позиционированная роботизированная система локального пожаротушения | 2016 |
|
RU2637745C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
Изобретение относится к области машиностроения, в частности к роботизированным модульным тележкам. Тележка содержит кузов на самоходном электрическом колесном шасси, навесное оборудование, смонтированное на тележке, тягово-сцепное устройство тележки, главный контроллер, модуль связи и модуль технического зрения с возможностью контроля окружающей обстановки и корректировки траектории движения. Управление тележкой осуществляется с помощью главного контроллера. К главному контроллеру подключен контроллер питания, интерфейсный модуль. Интерфейсный модуль включает в себя входные регистры и интерфейсы для подключения периферийных устройств. Тягово-сцепные устройства выполнены жесткими и смонтированы в передней и задней частях тележки. В одной части тележки смонтирован корпус тягово-сцепного устройства, а в противоположной части смонтирован кронштейн тягово-сцепного устройства с возможностью взаимозацепления двух роботизированных модульных тележек. При объединении тележек главный контроллер одной из тележек становится основным главным контроллером для всего ряда подключенных тележек. Главные контроллеры остальных тележек переходят в ждущий режим. Достигается автоматизация производственных и логистических процессов. 17 з.п. ф-лы, 8 ил.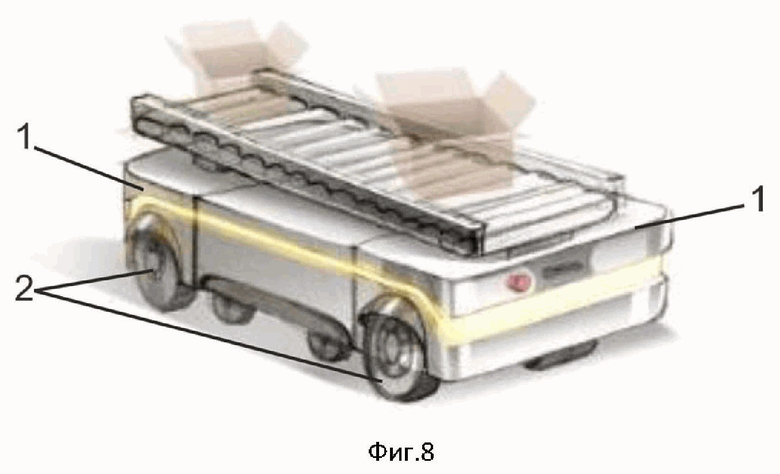
1. Роботизированная модульная тележка, содержащая кузов на самоходном электрическом колесном шасси, навесное оборудование, смонтированное на тележке, тягово-сцепное устройство тележки, главный контроллер, модуль связи и модуль технического зрения с возможностью контроля окружающей обстановки и корректировки траектории движения, отличающаяся тем, что колесное шасси выполнено в виде независимых приводных колес, расположенных по противоположным бортам тележки, каждое из которых снабжено сервомотором, питание сервомотора выполнено от блока аккумуляторных батарей, смонтированного внутри кузова тележки, при этом блок аккумуляторных батарей подключен к контроллеру питания, а управление сервомоторами приводных колес, в том числе для их раздельного включения, обеспечения вращения в разные стороны или вращения с разными угловыми скоростями для поворота роботизированной модульной тележки, осуществляется с помощью главного контроллера, к которому также подключен контроллер питания, к главному контроллеру подключен интерфейсный модуль, выполненный с возможностью взаимодействия с человеком, при этом интерфейсный модуль включает в себя входные регистры и интерфейсы для подключения периферийных устройств, тягово-сцепные устройства выполнены жесткими и смонтированными в передней и задней частях тележки, при этом в одной части тележки смонтирован корпус тягово-сцепного устройства, а в противоположной части смонтирован кронштейн тягово-сцепного устройства с возможностью взаимозацепления двух роботизированных модульных тележек или зацепления тележки с дополнительным навесным и/или транспортируемым оборудованием, таким как прицепы, стеллажи, грузоподъемное оборудование, снабженные ответными элементами тягово-сцепных устройств, в передней и задней частях тележки смонтированы разъемы для электрического подключения стыкующихся роботизированных модульных тележек между собой и электрического подключения к тележке дополнительного оборудования, при этом при объединении двух и более тележек главный контроллер одной из тележек становится основным главным контроллером для всего ряда подключенных тележек, главные контроллеры остальных тележек переходят в ждущий режим, к главному контроллеру подключен коммутационный модуль расширения для подключения через упомянутый модуль сервоприводов дополнительного оборудования.
2. Тележка по п.1, отличающаяся тем, что кузов тележки выполнен рамным.
3. Тележка по п.1, отличающаяся тем, что шасси тележки может содержать поддерживающие опорные колеса, смонтированные в противоположной приводным колесам части тележки, обеспечивающие устойчивое положение тележки на плоскости.
4. Тележка по п.1, отличающаяся тем, что опорные колеса могут быть выполнены поворотными для обеспечения поворота тележки при движении, для чего упомянутые опорные колеса смонтированы на единой платформе, которая шарнирно смонтирована в нижней части кузова тележки, а поворот упомянутой платформы обеспечивается отдельным сервомотором.
5. Тележка по п.1, отличающаяся тем, что блок аккумуляторных батарей расположен в нижней части тележки по центру с возможностью обеспечения устойчивости тележки.
6. Тележка по п.1, отличающаяся тем, что к главному контроллеру может быть подключен модуль связи, выполненный с возможностью удаленного управления главным контроллером, приема и передачи информации.
7. Тележка по п.1, отличающаяся тем, что к главному контроллеру подключен акселерометр для определения скорости движения тележки.
8. Тележка по п.1, отличающаяся тем, что к главному контроллеру подключен гироскоп для определения положения тележки в пространстве.
9. Тележка по п.1, отличающаяся тем, что модуль технического зрения может быть выполнен в виде лидара или видеокамеры.
10. Тележка по п.1, отличающаяся тем, что тягово-сцепные устройства выполнены в виде европетли, автосцепки.
11. Тележка по п.1, отличающаяся тем, что элементы тягово-сцепного устройства в передней и задней частях тележки могут быть снабжены датчиками взаимного распознавания, подключенными к главному контроллеру для быстрого и точного зацепления тягово-сцепных устройств двух тележек между собой или тележки и дополнительного оборудования, стыкуемого к тележке в автоматическом режиме.
12. Тележка по п.1, отличающаяся тем, что датчики взаимного распознавания выполнены индуктивными, фотоэлектрическими, емкостными, инфразвуковыми или в виде радиодатчиков.
13. Тележка по п.1, отличающаяся тем, что ответные элементы тягово-сцепного устройства дополнительного оборудования снабжены датчиками взаимного распознавания.
14. Тележка по п.1, отличающаяся тем, что дополнительные элементы, подключаемые к главному контроллеру через коммутационный модуль расширения, выполнены для измерения параметров окружающей среды и наблюдения за окружающей обстановкой, обнаружения препятствий.
15. Тележка по п.1, отличающаяся тем, что дополнительное навесное оборудование выполнено в виде манипулятора, выполненного в виде механической руки из шарнирно соединенных между собой элементов и снабженных сервоприводами, ленточного или роликового конвейера с приводами от сервоприводов для обеспечения забора/выгрузки продукции с конвейерных линий или с возможностью образования гибкой конвейерной линии при соединении нескольких роботизированных модульных тележек между собой, вил, снабженных сервоприводами, для транспортировки поддонов, контейнера или стеллажей для перевозки груза.
16. Тележка по п.1, отличающаяся тем, что дополнительное транспортируемое оборудование выполнено в виде прицепа или стеллажей для перевозки груза.
17. Тележка по п.1, отличающаяся тем, что снаружи кузов тележки снабжен пассивными или активными буферными антиударными элементами.
18. Тележка по п.1, отличающаяся тем, что снаружи кузов оборудован световыми приборами, выполненными с возможностью сигнализации о работе и движении тележки, и приборами освещения.
| CN 108436907 A, 24.08.2018 | |||
| CN 111845924 A, 30.10.2020 | |||
| СПОСОБ ПОЛУЧЕНИЯ N.[p- | 0 |
|
SU195456A1 |
| CN 106239471 A, 21.12.2016 | |||
| CN 107297744 A, 27.10.2017 | |||
| Способ получения метилового эфира дихлоруксусной кислоты | 1955 |
|
SU103147A1 |

