Область техники, к которой относится изобретение
Изобретение относится к программно-аппаратным комплексам, предназначенным для применения в качестве средства автоматизации управления процессами складской логистики предприятий-изготовителей различной промышленной продукции, торговых сетей продовольственных и непродовольственных товаров, интернет-магазинов и маркетплейсов, логистических компаний и операторов.
Изобретение позволяет проводить инвентаризации, разгрузочно-погрузочные работы, мониторинг состояния промышленных изделий и товаров в автоматическом режиме, без участия человека с возможностью визуализации процессов выполнения логистических задач в кроссплатформенном приложении по управлению складами.
Изобретение является высокотехнологичным комплексом, обладающим системами, обеспечивающими его полную автономную работу, обладает свойствами модульности, масштабируемости, а также имеет возможность интеграции и взаимодействия с системами управления бизнес-процессами.
Уровень техники
Из уровня техники известны различные варианты автоматизации складской логистики (https://www.forwardx.com/apex-amr/, https://www.jungheinrich.com.sg/systems/driverless-transport-systems/automated-guided-vehicles, https://www.hikrobotics.com/en/mobilerobot/FMR, Роботы КиберСклад (tadviser.ru)). К недостаткам известных решений следует отнести лишь частичную автоматизацию, не позволяющую обеспечить автономизацию управления складом.
Наиболее близким техническим решением, взятым за прототип, является программно-аппаратный комплекс по автоматизации складской логистики предприятий (см. CN 110963034 A, опуб. 07.04.2020). Прототип предусматривает в своем составе приложение по управлению складами, глобальный сервер с приложением по автоматической диагностике неисправностей в системе промышленного интернета вещей, беспилотный летательный аппарат-исследователь, роботизированный штабелер. При этом пользователь с помощью приложения может задавать настройки автоматической работы и отладки настроек комплекса, создавать логистические задачи на проведение инвентаризаций, разгрузочно-погрузочных работ, мониторинга систем хранения, которые отправляются на глобальный сервер с системой промышленного интернета вещей и передаются в виде сценариев использования комплекса для каждого склада пользователя.
К недостаткам прототипа следует отнести недостаточную автоматизацию и автономизацию управления процессами складской логистики, недостаточную эффективность складской логистической системы, отсутствие возможности контроля и учета складских запасов в режиме реального времени.
Технической задачей изобретения является преодоление недостатков существующего уровня техники.
При решении технической задачи изобретением достигается технический результат, заключающийся в автоматизации и автономизации управления процессами складской логистики, повышении эффективности складских логистических систем при использовании робототехнических средств автоматизации, обеспечении контроля и учета складских запасов в режиме реального времени.
Раскрытие сущности изобретения
Изобретение представляет собой программно-аппаратный комплекс по автоматизации складской логистики предприятий, выполненный с возможностью взаимодействия с пользователем, и содержащий:
кроссплатформенное приложение по управлению складами;
глобальный сервер с приложением по автоматической диагностике неисправностей в системе промышленного интернета вещей;
промежуточный сервер с интеллектуальной системой управления складом;
по меньшей мере, одну станцию зарядки робототехнических средств с локальным исполнительным сервером с роботизированной системой управления;
по меньшей мере, один беспилотный летательный аппарат-исследователь;
по меньшей мере, один беспилотный летательный аппарат-логист;
по меньшей мере, одно роботизированное устройство для транспортировки грузов;
при этом комплекс выполнен с возможностью взаимодействия с пользователем посредством кроссплатформенного приложения путем задачи настроек автоматической работы и отладки настроек комплекса, создания логистических задач на проведение инвентаризаций, разгрузочно-погрузочных работ, мониторинга систем хранения, которые отправляются на глобальный сервер с системой промышленного интернета вещей и передаются в виде сценариев использования комплекса для каждого склада пользователя на промежуточный сервер с интеллектуальной системой управления складом, которая в свою очередь распределяет сценарии между локальными исполнительными серверами с роботизированной системой управления, которая задает и контролирует исполнение сценариев каждым из, по меньшей мере, одним беспилотным летательным аппаратом-исследователем, каждым из, по меньшей мере, одним беспилотным летательным аппаратом-логистом, и каждым из, по меньшей мере, одним роботизированным устройством для транспортировки грузов,
а также в автоматическом режиме производит диагностику неисправностей методом оценки текущих значений параметров оборудования робототехнических средств и сравнения с параметрами, характеризующими работу оборудования в нормальном режиме при нормальных условиях, и уведомляет о неполадках в приложении по автоматической диагностике неисправностей организацию, отвечающую за обслуживание комплекса.
При этом каждое из, по меньшей мере, одного роботизированного устройства для транспортировки грузов может быть выполнено в виде роботизированного штабелера, роботизированного ричтрака, роботизированной платформы, автоматически управляемой тележки, логистического робота или беспилотного шаттла.
Кроме того, комплекс может быть выполнен с возможностью функционирования в том числе в условиях низкой или нулевой освещенности, в помещениях с низким или нулевым сетевым покрытием, и на складах, расположенных под землей.
Кроме того, каждый из, по меньшей мере, одного беспилотного летательного аппарата-исследователя может быть выполнен с возможностью автономного ориентирования в неизвестном пространстве, построения пространственной карты и задания оптимальных маршрутов перемещения для остальных роботизированных устройств.
Краткое описание сопроводительных фигур
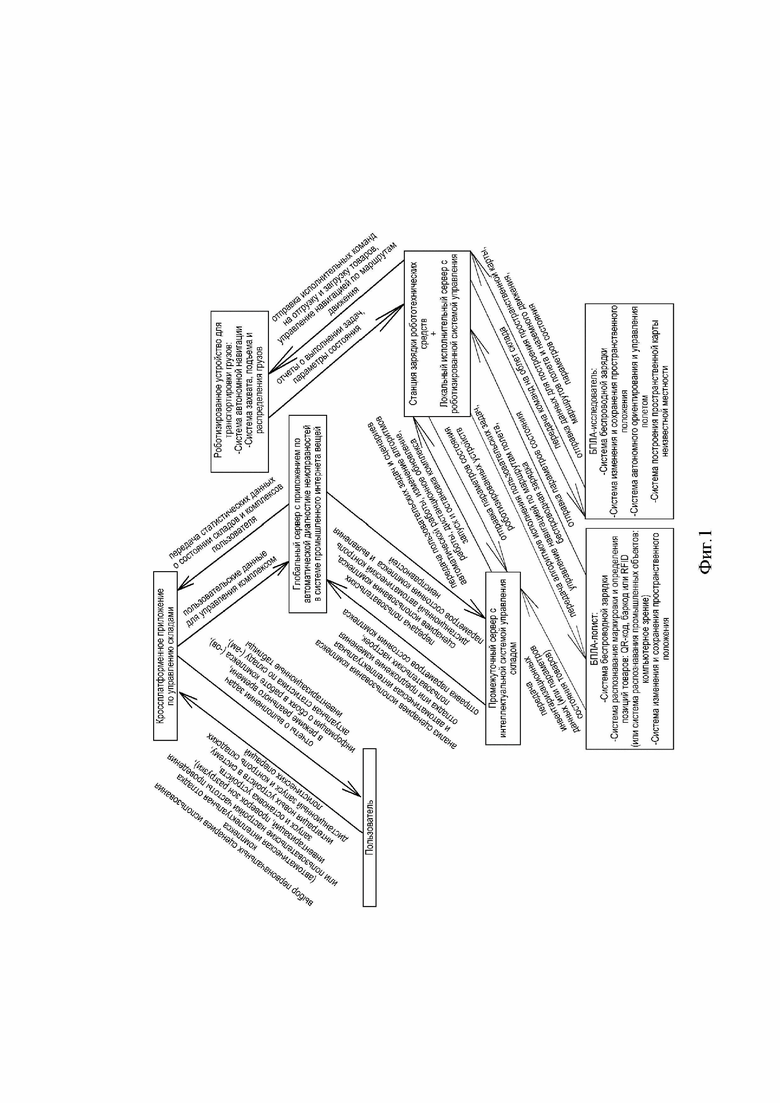
Сущность изобретения может быть дополнительно пояснена структурной схемой программно-аппаратного комплекса, отраженной на сопроводительной фигуре 1.
Осуществление изобретения
Программно-аппаратный комплекс по автоматизации складской логистики предприятий выполнен с возможностью взаимодействия с пользователем и содержит:
кроссплатформенное приложение по управлению складами;
глобальный сервер с приложением по автоматической диагностике неисправностей в системе промышленного интернета вещей;
промежуточный сервер с интеллектуальной системой управления складом;
по меньшей мере, одну станцию зарядки робототехнических средств с локальным исполнительным сервером с роботизированной системой управления;
по меньшей мере, один беспилотный летательный аппарат-исследователь;
по меньшей мере, один беспилотный летательный аппарат-логист;
по меньшей мере, одно роботизированное устройство для транспортировки грузов;
при этом комплекс выполнен с возможностью взаимодействия с пользователем посредством кроссплатформенного приложения путем задачи настроек автоматической работы и отладки настроек комплекса, создания логистических задач на проведение инвентаризаций, разгрузочно-погрузочных работ, мониторинга систем хранения, которые отправляются на глобальный сервер с системой промышленного интернета вещей и передаются в виде сценариев использования комплекса для каждого склада пользователя на промежуточный сервер с интеллектуальной системой управления складом, которая в свою очередь распределяет сценарии между локальными исполнительными серверами с роботизированной системой управления, которая задает и контролирует исполнение сценариев каждым из, по меньшей мере, одним беспилотным летательным аппаратом-исследователем, каждым из, по меньшей мере, одним беспилотным летательным аппаратом-логистом, и каждым из, по меньшей мере, одним роботизированным устройством для транспортировки грузов,
а также в автоматическом режиме производит диагностику неисправностей методом оценки текущих значений параметров оборудования робототехнических средств и сравнения с параметрами, характеризующими работу оборудования в нормальном режиме при нормальных условиях, и уведомляет о неполадках в приложении по автоматической диагностике неисправностей организацию, отвечающую за обслуживание комплекса.
Комплекс может быть выполнен с возможностью функционирования в том числе в условиях низкой или нулевой освещенности, в помещениях с низким или нулевым сетевым покрытием, и на складах, расположенных под землей.
Каждый из, по меньшей мере, одного беспилотного летательного аппарата-исследователя может быть выполнен с возможностью автономного ориентирования в неизвестном пространстве, построения пространственной карты и задания оптимальных маршрутов перемещения для остальных роботизированных устройств.
Пользователь в кроссплатформенном приложении по управлению складами выбирает первоначальный сценарий использования комплекса выставлением настроек автоматической работы, включающих частоту проведения инвентаризаций беспилотным летательным аппаратом-логистом, частоту мониторинга складского помещения беспилотным летательным аппаратом-исследователем, частоту проверок зон разгрузки товаров роботизированным устройством для транспортировки грузов, также пользователь оставляет по умолчанию или отключает режим автоматической отладки, заключающийся в динамическом регулировании настроек автоматической работы интеллектуальной системой управления складом на основании статистики использования склада, товарооборота на складе и выполнения складских логистических операций.
Затем пользователь добавляет приобретенные робототехнические устройства в приложение вводом серийных номеров устройств и выбирает для каждого устройства склад с порядковым номером, где будет функционировать добавляемое устройство. При добавлении устройств на склады создаются группы обслуживания с порядковыми номерами, соответствующими порядковым номерам складов, к которым привязаны добавленные устройства. При работе комплекса на каждом складе происходит автоматическое распределение логистических задач между роботизированными устройствами, входящими в состав группы обслуживания склада.
Пользовательские данные для управления комплексом передаются в зашифрованном виде на глобальный сервер с приложением по автоматической диагностике неисправностей в системе промышленного интернета вещей, где хранятся вместе с персональными данными пользователя и утилизируются по истечению срока действия договора на использование программно-аппаратного комплекса или при нарушении пользователем условий использования комплекса.
После выставления всех настроек автоматической работы и выбора применения режима автоматической отладки настроек запускается стандартный сценарий на исследование складского помещения и первичного облета склада, после чего комплекс готов к автоматической работе и выполнению пользовательских команд.
Беспилотный летательный аппарат-исследователь совершает полный облет склада, сканирует помещение с помощью лазерных дальномеров и роботизированной системы управления, строит пространственную карту склада и оптимальные маршруты беспилотных летательных аппаратов и роботизированных устройств для транспортировки грузов. В соответствии с настройками автоматической работы или по команде пользователя с целью мониторинга складского помещения совершает повторные облеты склада с обновлением и дополнением пространственной карты и маршрутов.
Беспилотный летательный аппарат-логист в автоматическом режиме или по запросу пользователя проводит инвентаризации, передает данные по распознанным объектам в роботизированную систему управления, которая в зашифрованном виде отправляет полученные данные на промежуточный сервер с интеллектуальной системой управления складом, где производится их расшифровка, обработка и оценка, с целью принятия решений о повторном проведении инвентаризаций в случае возникновения ошибок. Если повторное проведение инвентаризации не требуется, данные снова проходят процедуру шифрования и отправляются на глобальный сервер, где происходит их представление в удобном для пользователя виде и дальнейшее отображение в кроссплатформенном приложении по управлению складами.
Роботизированное устройство для транспортировки грузов в автоматическом режиме выполняет проверку зон разгрузки товаров, при обнаружении паллет с грузами распределяет их по системам хранения, также по команде пользователя в кроссплатформенном приложении выполняет транспортировку паллет, размещенных на стеллажах в зоны выгрузки товаров. Координация действий роботизированного устройства для транспортировки грузов производится роботизированной системой управления, оценка стадии выполнения алгоритма по транспортировке груза позволяет визуализировать процесс выполнения в режиме реального времени в кроссплатформенном приложении.
Программно-аппаратный комплекс состоит из следующих структурных элементов:
- пользователь;
- кроссплатформенное приложение по управлению складами (приложение по управлению складами);
- глобальный сервер с приложением по автоматической диагностике неисправностей в системе промышленного интернета вещей (глобальный сервер);
- промежуточный сервер с интеллектуальной системой управления складом (промежуточный сервер);
- станция зарядки робототехнических средств с локальным исполнительным сервером с роботизированной системой управления (станция зарядки с локальным сервером);
- беспилотный летательный аппарат-исследователь (БПЛА-исследователь);
- беспилотный летательный аппарат-логист (БПЛА-Логист);
- роботизированное устройство для транспортировки грузов.
Пользователь с помощью кроссплатформенного приложения задает настройки автоматической работы и отладки настроек комплекса, создает логистические задачи на проведение инвентаризаций, разгрузочно-погрузочных работ, мониторинга систем хранения, которые отправляются на глобальный сервер с системой промышленного интернета вещей и передаются в виде сценариев использования комплекса для каждого склада пользователя на промежуточный сервер с интеллектуальной системой управления складом, которая распределяет сценарии между локальными исполнительными серверами с роботизированной системой управления, а та в свою очередь задает и контролирует исполнение сценариев беспилотными летательными аппаратами-исследователями, БПЛА-логистами, роботизированными устройствами для транспортировки грузов, а также в автоматическом режиме производит диагностику неисправностей методом оценки текущих значений параметров оборудования робототехнических средств и сравнения с параметрами, характеризующими работу оборудования в нормальном режиме при нормальных условиях, и уведомляет о неполадках в приложении по автоматической диагностике неисправностей организацию, отвечающую за обслуживание комплекса.
Неограничивающие примеры осуществления изобретения.
Пример1. ПАК состоит из кроссплатформенного приложения по управлению складами, глобального сервера с приложением по автоматической диагностике неисправностей в системе промышленного интернета вещей, промежуточного сервера с интеллектуальной системой управления складом, станции зарядки робототехнических средств с локальным исполнительным сервером с роботизированной системой управления, 1 БПЛА-исследователя, 1 БПЛА-логиста, 1 роботизированного устройства для транспортировки грузов.
Склад находится на поверхности, размер склада 5000 мест хранения.
Нормальный режим: фактическое время полного облета склада одним БПЛА-логистом 45 минут, фактическое время с момента распознавания маркировки товара до момента появления в системе управления складом 5 секунд.
Нормальные условия: температура +10 градусов Цельсия, освещенность 50 люкс для зон хранения, влажность 60%.
Пример2. ПАК состоит из кроссплатформенного приложения по управлению складами, глобального сервера с приложением по автоматической диагностике неисправностей в системе промышленного интернета вещей, промежуточного сервера с интеллектуальной системой управления складом, 4 станций зарядки робототехнических средств с локальным исполнительным сервером с роботизированной системой управления, 4 БПЛА-исследователей, 4 БПЛА-логистов, 4 роботизированных устройств для транспортировки грузов.
Склад находится под землей, размер склада 5000 мест хранения.
Нормальный режим: фактическое время полного одновременного облета склада всеми БПЛА-логистами 25 минут, фактическое время с момента распознавания маркировки товара до момента появления в системе управления складом 5 секунд.
Нормальные условия: температура +5 градусов Цельсия, освещенность 0 люкс для зон хранения, влажность 70%.
Преимущества перед аналогами:
1. Возможность полной автоматизации управления складом, без привлечения персонала за счет распределения логистических задач между роботизированными устройствами и системами, обеспечивающими автономную работу.
2. Модульность комплекса, представленная возможностью использования составных частей как совместно, так и по отдельности, а также возможностью легкого добавления новых роботизированных устройств в систему управления складами.
3. Возможность подстраиваться под любые системы идентификации товаров в системах хранения, которая достигается вариативностью исполнения логистических роботов, путем изменения навесного оборудования. Так же, в зависимости от вариативного исполнения логистических роботов, комплекс может работать в условиях при низкой или нулевой освещенности и в помещениях с низким или нулевым сетевым покрытием, в том числе на складах, расположенных под землей.
4. Отсутствие необходимости предварительного изучения помещений и построения маршрутов роботизированных устройств специалистами по пусконаладке, беспилотный летательный аппарат-исследователь обладает навыками автономного ориентирования в неизвестном пространстве, строит пространственную карту и оптимальные маршруты перемещения остальных роботизированных устройств.
5. Возможность устранения неисправностей дистанционно, без привлечения специалистов на склад, которая достигается системой автоматической диагностики неисправностей, оперативной отправкой уведомлений о неисправностях и возможностью удаленной отладки робототехнических устройств с помощью системы промышленного интернета вещей.
6. Отсутствие необходимости вносить изменения в систему хранения для интеграции программно-аппаратного комплекса за счет использования нейросетей при определении возможности идентификации товара.
Изобретением достигаются следующие результаты:
1. Автоматизация и автономизация управления процессами складской логистики.
2. Повышение эффективности складских логистических систем при использовании робототехнических средств автоматизации.
3. Контроль и учет складских запасов в режиме реального времени.
4. Обеспечение пользователей надежным и доступным инструментом решения складских логистических задач.
5. Увеличение экономической эффективности от использования автоматических складов за счет систем, обеспечивающих полную автоматизацию, а также за счет отсутствия необходимости регулярного обслуживания и операторского контроля.
6. Увеличение экономической эффективности использования склада за счет полной автоматизации управления складскими логистическими процессами и контроля их выполнения с помощью интеллектуальных систем.
7. Повышение точности проведения инвентаризаций в складских логистических системах, благодаря высокотехнологичным механизмам роботизированной идентификации товаров.
8. Минимизация простоев в работе склада за счет возможности круглосуточного беспрерывного функционирования.
9. Обеспечение пользователей интуитивно понятным, простым и надежным инструментом решения складских логистических задач с возможностью визуализации выполнения процессов в режиме реального времени.
Особенности изобретения позволяют преодолеть недостатки существующего уровня техники, автоматизировать и автономизировать управление процессами складской логистики, повысить эффективность складских логистических систем при использовании робототехнических средств автоматизации, обеспечить контроль и учет складских запасов в режиме реального времени
Поиск по общедоступным источникам информации показал, что из уровня техники не известна и явным образом не следует вся совокупность признаков предложенного изобретения, в связи с чем изобретение соответствует условиям патентоспособности «новизна» и «изобретательский уровень».
Заявленное изобретение состоит из стандартных для этой области техники элементов, взаимосвязанных определенным образом, то есть может быть использовано в промышленности, ввиду чего изобретение соответствует условию патентоспособности «промышленная применимость».
Следует понимать, что после рассмотрения специалистом приведенного описания с примером осуществления предлагаемого изобретения, для него станут очевидными другие изменения, модификации и варианты реализации изобретения. Таким образом, все подобные изменения, модификации и варианты реализации, а также другие области применения, не имеющие расхождений с сущностью настоящего изобретения, следует считать защищенными настоящим изобретением в объеме прилагаемой формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система коммуникаций здания | 2022 |
|
RU2785231C1 |
| РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КУРЬЕРСКИЙ КОМПЛЕКС | 2022 |
|
RU2787547C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕДПРИЯТИЕМ И АВТОМАТИЗАЦИИ ОПЕРАЦИЙ НА ПРЕДПРИЯТИИ | 2017 |
|
RU2651182C1 |
| Автоматизированная логистическая информационно-интеллектуальная система принятия решений в производственно-логистическом комплексе | 2020 |
|
RU2755520C1 |
| Многофункциональный центр управления движением и моделирования динамики летательных аппаратов | 2017 |
|
RU2646784C1 |
| Транспортно-логистическая коммуникационная система и используемые в ней мультифункциональные роботизированные транспортные средства | 2021 |
|
RU2759847C1 |
| Способ автоматизированного возведения сооружений | 2021 |
|
RU2761783C1 |
| РОБОТИЗИРОВАННЫЙ ВЕЗДЕХОДНЫЙ КОМПЛЕКС ДЛЯ ХРАНЕНИЯ И ОТПУСКА ПРОДУКЦИИ | 2022 |
|
RU2787095C1 |
| Логистическая система здания | 2023 |
|
RU2835043C1 |
| СИСТЕМА ДОСТАВКИ КОНТЕЙНЕРА С ПОМОЩЬЮ ДРОНА | 2016 |
|
RU2646689C1 |
Изобретение относится к программно-аппаратным комплексам, предназначенным для применения в качестве средства автоматизации управления процессами складской логистики предприятий-изготовителей различной промышленной продукции, торговых сетей продовольственных и непродовольственных товаров, интернет-магазинов и маркетплейсов, логистических компаний и операторов. Программно-аппаратный комплекс по автоматизации складской логистики предприятий выполнен с возможностью взаимодействия с пользователем и содержит: кроссплатформенное приложение по управлению складами; глобальный сервер с приложением по автоматической диагностике неисправностей в системе промышленного интернета вещей; промежуточный сервер с интеллектуальной системой управления складом; по меньшей мере, одну станцию зарядки робототехнических средств с локальным исполнительным сервером с роботизированной системой управления; по меньшей мере, один беспилотный летательный аппарат-исследователь; по меньшей мере, один беспилотный летательный аппарат-логист; по меньшей мере, одно роботизированное устройство для транспортировки грузов. При этом комплекс выполнен с возможностью взаимодействия с пользователем посредством кроссплатформенного приложения путем задачи настроек автоматической работы и отладки настроек комплекса, создания логистических задач на проведение инвентаризаций, разгрузочно-погрузочных работ, мониторинга систем хранения, которые отправляются на глобальный сервер с системой промышленного интернета вещей и передаются в виде сценариев использования комплекса для каждого склада пользователя на промежуточный сервер с интеллектуальной системой управления складом, которая в свою очередь распределяет сценарии между локальными исполнительными серверами с роботизированной системой управления, которая задает и контролирует исполнение сценариев каждым из, по меньшей мере, одним беспилотным летательным аппаратом-исследователем, каждым из, по меньшей мере, одним беспилотным летательным аппаратом-логистом и каждым из, по меньшей мере, одним роботизированным устройством для транспортировки грузов, а также в автоматическом режиме производит диагностику неисправностей методом оценки текущих значений параметров оборудования робототехнических средств и сравнения с параметрами, характеризующими работу оборудования в нормальном режиме при нормальных условиях, и уведомляет о неполадках в приложении по автоматической диагностике неисправностей организацию, отвечающую за обслуживание комплекса. Технический результат заключается в автоматизации и автономизации управления процессами складской логистики, повышении эффективности складских логистических систем при использовании робототехнических средств автоматизации, обеспечении контроля и учета складских запасов в режиме реального времени. 3 з.п. ф-лы, 1 ил.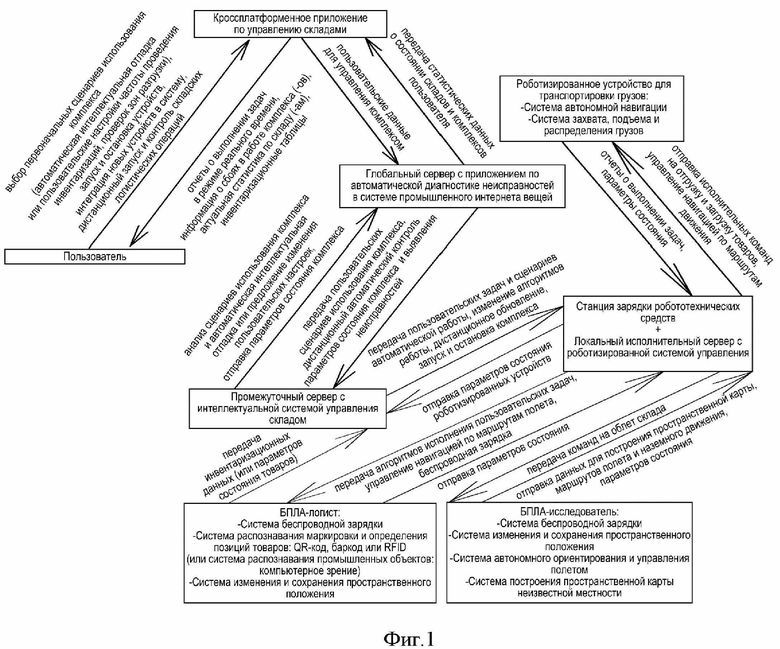
1. Программно-аппаратный комплекс по автоматизации складской логистики предприятий, выполненный с возможностью взаимодействия с пользователем и содержащий:
кроссплатформенное приложение по управлению складами;
глобальный сервер с приложением по автоматической диагностике неисправностей в системе промышленного интернета вещей;
промежуточный сервер с интеллектуальной системой управления складом;
по меньшей мере, одну станцию зарядки робототехнических средств с локальным исполнительным сервером с роботизированной системой управления;
по меньшей мере, один беспилотный летательный аппарат-исследователь;
по меньшей мере, один беспилотный летательный аппарат-логист;
по меньшей мере, одно роботизированное устройство для транспортировки грузов;
при этом комплекс выполнен с возможностью взаимодействия с пользователем посредством кроссплатформенного приложения путем задачи настроек автоматической работы и отладки настроек комплекса, создания логистических задач на проведение инвентаризаций, разгрузочно-погрузочных работ, мониторинга систем хранения, которые отправляются на глобальный сервер с системой промышленного интернета вещей и передаются в виде сценариев использования комплекса для каждого склада пользователя на промежуточный сервер с интеллектуальной системой управления складом, которая в свою очередь распределяет сценарии между локальными исполнительными серверами с роботизированной системой управления, которая задает и контролирует исполнение сценариев каждым из, по меньшей мере, одним беспилотным летательным аппаратом-исследователем, каждым из, по меньшей мере, одним беспилотным летательным аппаратом-логистом и каждым из, по меньшей мере, одним роботизированным устройством для транспортировки грузов,
а также в автоматическом режиме производит диагностику неисправностей методом оценки текущих значений параметров оборудования робототехнических средств и сравнения с параметрами, характеризующими работу оборудования в нормальном режиме при нормальных условиях, и уведомляет о неполадках в приложении по автоматической диагностике неисправностей организацию, отвечающую за обслуживание комплекса.
2. Программно-аппаратный комплекс по автоматизации складской логистики предприятий по п.1, отличающийся тем, что каждое из, по меньшей мере, одного роботизированного устройства для транспортировки грузов выполнено в виде роботизированного штабелера, роботизированного ричтрака, роботизированной платформы, автоматически управляемой тележки, логистического робота или беспилотного шаттла.
3. Программно-аппаратный комплекс по автоматизации складской логистики предприятий по любому из пп.1 или 2, отличающийся тем, что комплекс выполнен с возможностью функционирования в том числе в условиях низкой или нулевой освещенности, в помещениях с низким или нулевым сетевым покрытием и на складах, расположенных под землей.
4. Программно-аппаратный комплекс по автоматизации складской логистики предприятий по любому из пп.1-3, отличающийся тем, что каждый из, по меньшей мере, одного беспилотного летательного аппарата-исследователя выполнен с возможностью автономного ориентирования в неизвестном пространстве, построения пространственной карты и задания оптимальных маршрутов перемещения для остальных роботизированных устройств.
| CN 110963034 A, 07.04.2020 | |||
| CN 112529498 A, 19.03.2021 | |||
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2605948C2 |
| US 2020371528 A1, 26.11.2020. | |||

