Изобретение относится к области робототехники, в частности к силовым шарнирам манипуляторов, и может быть использовано в многокоординатных автоматических механизмах различного назначения с компьютерным управлением.
Известен шарнирный механизм манипулятора, содержащий неподвижную полую сферу с равномерно расположенными на ее внутренней поверхности электромагнитами; подвижную сферу с рабочим органом, размещенную внутри неподвижной сферы и снабженную элементами, взаимодействующими с электромагнитами неподвижной полой сферы. При этом рабочий орган снабжен фиксатором его положения относительно неподвижной полой сферы [1].
В известном шарнирном механизме манипулятора для перемещения рабочего органа в любом направлении использовано электромагнитное взаимодействие элементов подвижной и неподвижной сфер по алгоритму, задаваемому компьютерной системой управления. При этом в любом положении рабочий орган может быть зафиксирован сферическим фиксатором за счет электромагнитного взаимодействия фиксатора с неподвижной сферой, являющейся основанием известного шарнира. Однако известный шарнир может быть использован при сравнительно небольших нагрузках на рабочий орган, поскольку создание значительных механических усилий за счет электромагнитного взаимодействия подвижных элементов требует существенного увеличения их габаритов и больших затрат энергии с соответствующим выделением тепла. Эти же рассуждения относятся и к устройству фиксатора рабочего органа известного шарнира.
Известен также приводной шарнир манипулятора (шарнирный механизм), выбранный в качестве прототипа, содержащий выходное звено, закрепленное на шаровом пальце, шаровую опору с каналами подачи (отбора) рабочей среды и с проточками, взаимодействующими с лопатками на сопряженной шаровой поверхности и образующими с ними герметичные полости, связанные с каналами подачи (отбора) рабочей среды [2].
В известном шарнирном механизме перемещение выходного звена, закрепленного на шаровом пальце, осуществляется за счет гидродинамических эффектов, возникающих при подаче под давлением рабочей среды (жидкости или газа) в герметичные полости, образованные проточками на шаровой опоре и взаимодействующими с ними лопатками шарового пальца. За счет этого усилие перемещения шарового пальца, в отличии от аналога, могут быть весьма значительными и ограничиваются только давлением рабочей среды и геометрическими размерами проточек и лопаток. Однако в известном шарнирном механизме не предусмотрен поворот выходного звена вокруг его оси, что ограничивает возможности применения данного устройства, в частности, при использовании в качестве рабочего органа каких-либо захватов. Помимо этого, при работе известного шарового механизма возникают значительные паразитные внутренние усилия, связанные с несимметричностью распределения рабочей среды по проточкам устройства, то есть при повороте шарового пальца в какой-либо плоскости с одной его стороны в проточке формируют высокое давление рабочей среды, а с противоположной - низкое. При такой несимметрии возникает тенденция прижатия шарового пальца к внутренней поверхности шаровой опоры. Однако этого не происходит только из-за того, что возникшее таким образом внутреннее паразитное усилие берут на себя лопатки, расположенные в плоскости перпендикулярной плоскости поворота шарового пальца. Возникают пары повышенного трения (проточка - лопатка), резко снижающие КПД известного шарнирного механизма.
Технической целью настоящего изобретения является расширение функциональных возможностей шарнирного механизма и повышение его КПД.
Указанная цель достигается за счет того, что в известном шаровом механизме манипулятора, содержащем выходное звено, закрепленное на шаровом пальце, шаровую опору с каналами подачи (отбора) рабочей среды и с проточками, взаимодействующими с лопатками на сопряженной шаровой поверхности и образующими с ними герметичные полости, связанные с каналами подачи (отбора) рабочей среды, между шаровым пальцем, дополнительно оснащенном четырьмя приводными лопатками, установленными попарно симметрично относительно оси его вращения, и шаровой опорой установлены две дополнительные шаровые обоймы, имеющие возможность поворота во взаимно перпендикулярных плоскостях, причем каждая из обойм оснащена четырьмя приводными лопатками, установленными попарно симметрично относительно оси ее вращения, и проточками, взаимодействующими с приводными лопатками на смежных шаровых поверхностях, а именно: первая обойма, считая от шаровой опоры, своими приводными лопатками взаимодействует с проточками шаровой опоры, а проточками - с приводными лопатками второй обоймы, которая, в свою очередь, своими проточками взаимодействует с приводными лопатками шарового пальца, при этом на обеих шаровых обоймах и на шаровой опоре размещены передаточные коллекторы, формирующие неразрывные потоки подачи (отбора) рабочей среды к прорезям подвижных шаровых обойм и выполненные в виде либо пар взаимно сопряженных дуговых пазов и торцов каналов подачи (отбора) рабочей среды, либо пар взаимно примыкающих торцов каналов подачи (отбора) рабочей среды, расположенных диаметрально противоположно и коаксиально осям вращения смежных обойм.
Сущность изобретения состоит в следующем.
Дополнительное оснащение шарового пальца четырьмя приводными лопатками, установленными попарно симметрично относительно оси его вращения, позволяет реализовать поворот шарового пальца вокруг его оси, что расширяет функциональные возможности устройства, а симметрия установки приводных лопаток относительно оси вращения шарового пальца исключает внутренние паразитные усилия при его повороте за счет взаимных компенсаций гидродинамических сил, прилагаемым к приводным лопаткам, что повышает КПД шарнирного механизма.
Установка двух дополнительных шаровых обойм, имеющие возможность поворота во взаимно перпендикулярных плоскостях, дает возможность реализовать две степени свободы перемещения выходного звена шарнира, а оснащение каждой из обойм четырьмя приводными лопатками, установленными попарно симметрично относительно осей их вращения, и проточками, взаимодействующими с приводными лопатками на смежных шаровых поверхностях, исключает внутренние паразитные усилия при повороте обойм за счет взаимных компенсаций гидродинамических сил, возникающих в проточках взаимно прилегающих сферических поверхностей при подаче туда рабочей среды под давлением, что повышает КПД шарнирного механизма.
Условия сопряжения подвижных элементов шарнирного механизма, при которых первая дополнительная обойма, считая от шаровой опоры, своими приводными лопатками взаимодействует с проточками шаровой опоры, а проточками с приводными лопатками второй дополнительной обоймы, которая, в свою очередь, своими проточками взаимодействует с приводными лопатками шарового пальца, обеспечивают одновременное и независимое друг от друга перемещение всех элементов шарнирного механизма, чем обеспечивается его расширенная, по сравнению с аналогом, функциональность.
Наличие на обеих дополнительных шаровых обоймах и на шаровой опоре передаточных коллекторов, дает возможность формировать неразрывные потоки подачи (отбора) рабочей среды к прорезям подвижных шаровых обойм при любом их положении. Передаточные коллекторы на шаровой опоре и на первой дополнительной обойме выполнены в виде пар взаимно сопряженных дуговых пазов и торцов каналов подачи (отбора) рабочей среды, причем пазы расположены коаксиально оси вращения первой шаровой обоймы и повторяют по своей форме траекторию ее движения, а торцы каналов, взаимодействующие с пазами и образующие с ними герметичные полости при любом взаимном положении сопряженных шаровых поверхностей, расположены на шаровой поверхности первой дополнительной обоймы. Помимо этого, на шаровой опоре, на первой и второй дополнительной обойме передаточные коллекторы образованы взаимно примыкающими торцами каналов, расположенными диаметрально противоположно и соосно осям вращения смежных обойм, за счет чего формируется непрерывный поток рабочей среды к прорезям обойм при любом взаимном их расположении, что обеспечивает расширенное функционирование предлагаемого шарнирного механизма по высоком КПД его работы.
Изобретение поясняется рисунками.
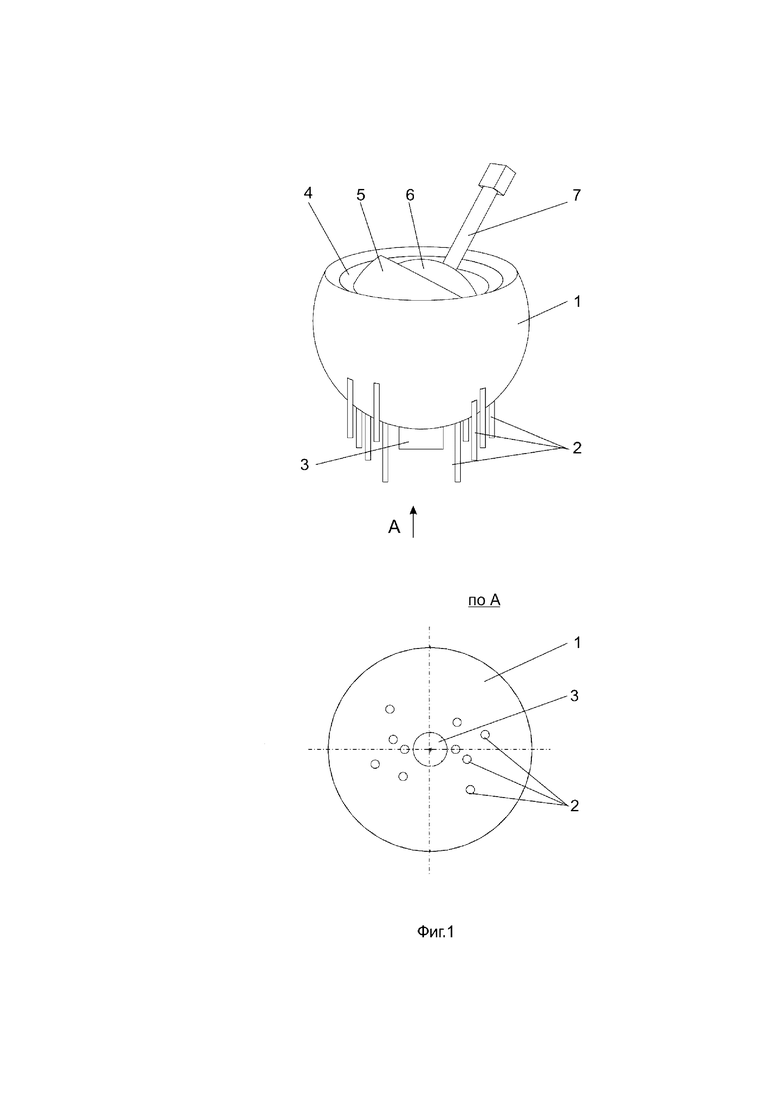
На фиг. 1 в аксонометрии показан общий вид предлагаемого шарнирного механизма манипулятора со случайным положением дополнительных шаровых обойм, шарового пальца и выходного звена с пояснением конструкции шарнира снизу (вид по стрелке А).
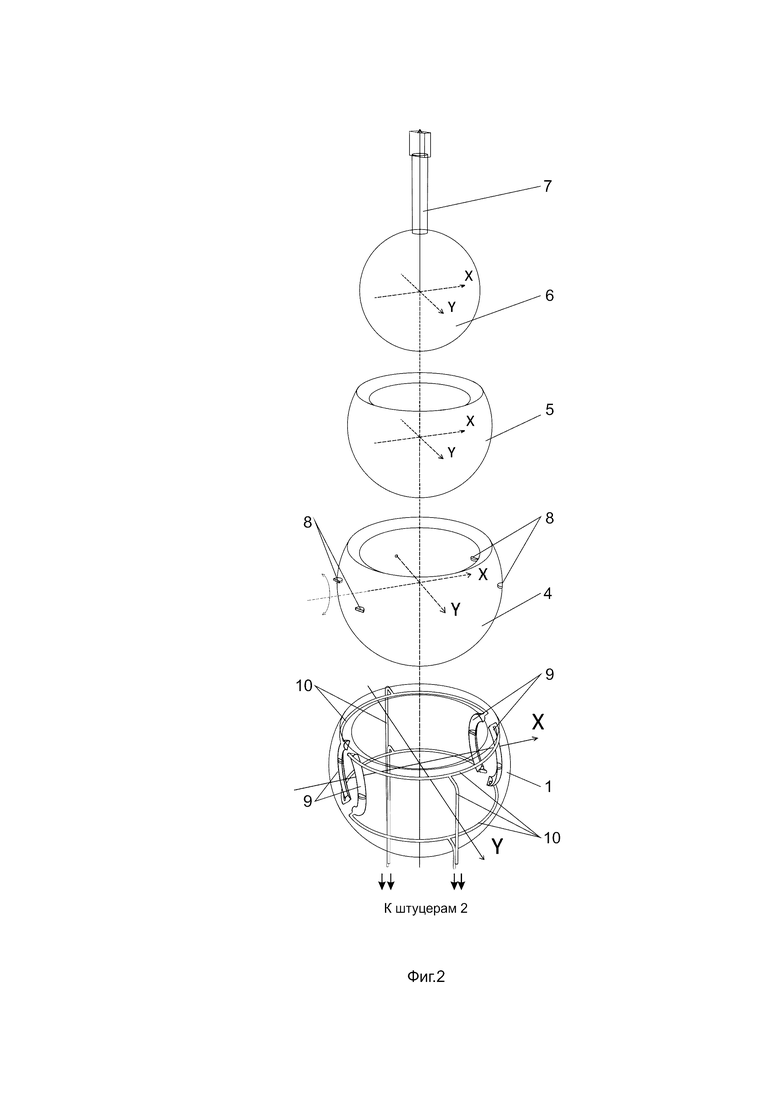
На фиг. 2 в аксонометрии показана схема привода первой дополнительной обоймы шарнирного механизма (элементы механизма условно разнесены по вертикали).
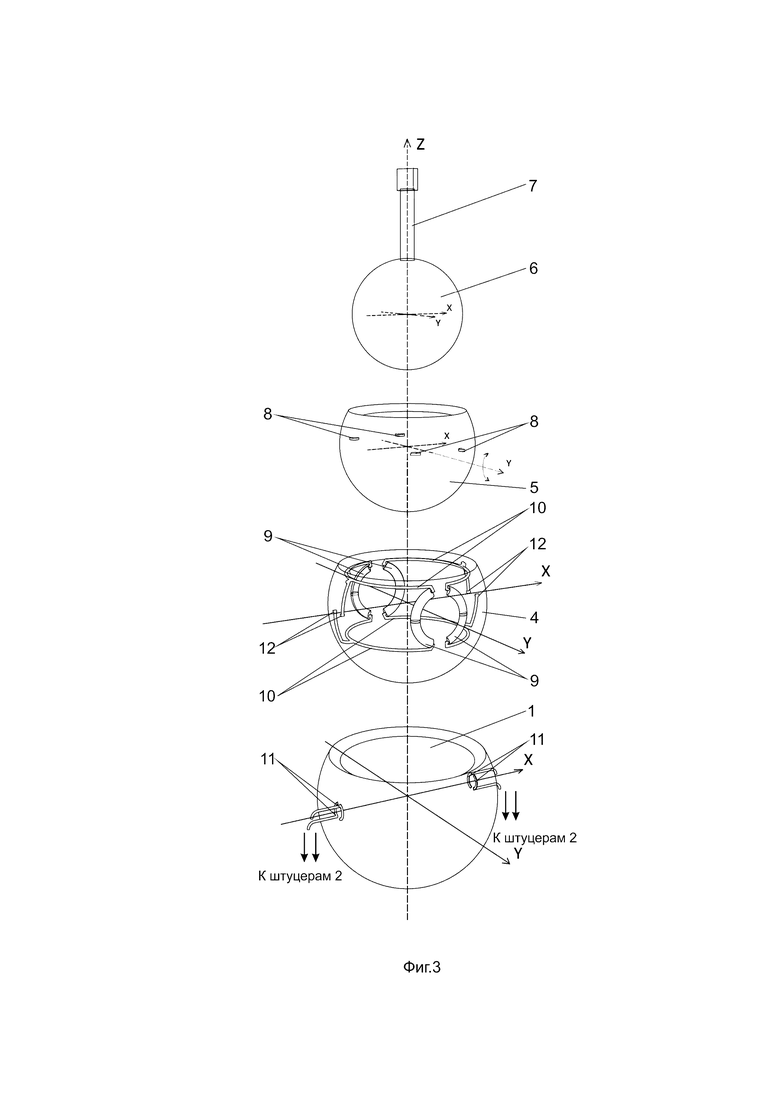
На фиг. 3 в аксонометрии показана схема привода второй дополнительной обоймы шарнирного механизма (элементы механизма условно разнесены по вертикали).
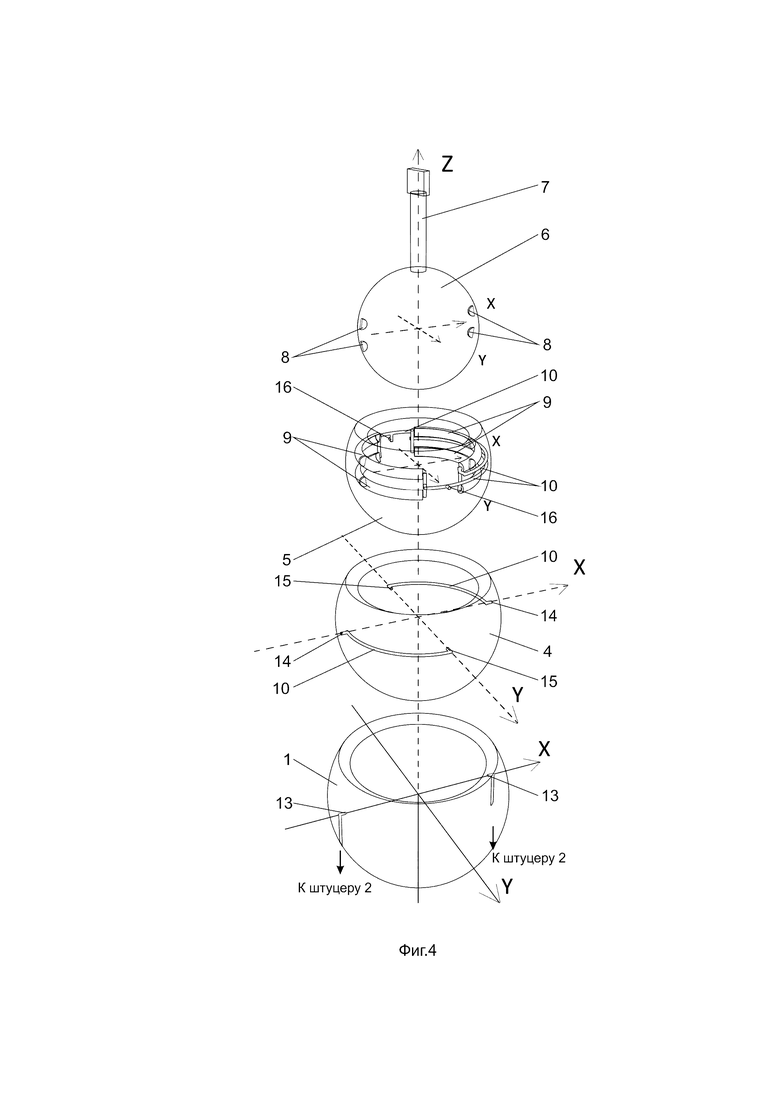
На фиг. 4 в аксонометрии показана схема привода шарового пальца шарнирного механизма (элементы механизма условно разнесены по вертикали).
Шарнирный механизм манипулятора (см. фиг. 1) состоит из: шаровой опоры 1, являющейся корпусом устройства, оснащенной штуцерами 2 для подвода (отвода) рабочей среды (жидкости или газа) к силовым элементам механизма, а также переходником 3 для крепления шарнирного механизма к пользовательским агрегатам; дополнительных шаровых обойм: первой 4 и второй 5, и шарового пальца 6 с выходным звеном 7, предназначенном для крепления каких-либо исполнительных механизмов при эксплуатации данного устройства (захват, фрезерная или сверлильная головка и пр.). При этом дополнительные шаровые обоймы 4,5 и шаровой палец 6 установлены концентрично шаровой опоре 1 с возможностью свободного перемещения относительно друг друга.
На дополнительных шаровых обоймах 4,5 и шаровом пальце 6 симметрично относительно их геометрических центров и соответствующих осей вращения закреплены лопатки 8 (см. фиг. 2-4), образующие совместно с сопрягаемыми с ними прорезями 9, выполненными на прилегающих к лопаткам сферических поверхностях, силовые элементы шарнирного механизма.
Каналы 10, выполненные в телах дополнительных шаровых обойм 4,5 и шаровой опоры 1, служат для распределения потоков рабочей среды от штуцеров 2 к прорезям 9. Для передачи рабочей среды между подвижными элементами шарнирного механизма служат передаточные коллекторы, образованные либо пазами 11 (см. фиг. 3) и примыкающими к ним торцам 12 каналов 10 подачи (отбора) рабочей среды, либо только попарно примыкающими друг к другу торцами 13, 14 и 15, 16 каналов подачи (отбора) рабочей среды (см. фиг. 4). При этом пазы 11 на шаровой опоре 1 (см. фиг. 3) выполнены симметрично относительно геометрического центра шарнира и коаксиально виртуальной оси вращения дополнительной обоймы 4, повторяя по форме траекторию ее движения, а торцы 12, расположенные на дополнительной обойме 4 соосно с ее виртуальной осью вращения, при любом положении последней примыкают к пазам 11.
Торцы 13 каналов 10 подачи (отбора) рабочей среды на шаровой опоре 1 (см. фиг. 4), соединенные с парой штуцеров 2, расположены соосно с виртуальной осью вращения дополнительной обоймы 4 и примыкают к ее торцам 14, которые в свою очередь каналами 10 соединены с торцами 15, расположенными соосно виртуальной оси вращения дополнительной обоймы 5 и примыкающими к торцам 16 на ее внешней поверхности.
Работает предлагаемый шарнирный механизм следующим образом. Для поворота первой дополнительной обоймы 4, например, по часовой стрелке вокруг оси X (см. фиг. 2) используют четыре штуцера 2: в пару из них подают рабочую среду под давлением, а из других двух - рабочую среду отбирают. По каналам 10 происходит распределение потоков рабочей жидкости по прорезям 9, причем таким образом, чтобы исключалось прижатие обоймы 4 к внутренней поверхности шаровой опоры 1. Это достигается за счет того, что рабочую среду под давлением подают в силовые элементы, образованные прорезями 9 и лопатками 8, противонаправленно и симметрично относительно виртуальной оси вращения обоймы 4 (ось X), то есть среду подают в нижние части левых (см. фиг. 2) прорезей 9 и в верхние части правых прорезей 9. Отбор рабочей среды происходит из противоположных частей упомянутых прорезей. При этом возникает крутящий момент, приложенный к первой дополнительной обойме 4 за счет перемещения ее лопаток 8 в прорезях 9, а, следовательно, обеспечивается равномерность и минимизация сил трения между сопряженными сферическими поверхностями при их взаимном перемещении. Таким образом дополнительная обойма 4 поворачивается вокруг оси X (в данном примере по часовой стрелке). Реверс вращения дополнительной обоймы 4 осуществляют за счет реверсирования потоков рабочей среды через штуцера 2.
Для поворота дополнительной обоймы 5 (см. фиг. 3) вокруг оси Y используют другие четыре штуцера 2: в пару из них подают рабочую среду под давлением, а из других двух - рабочую среду отбирают. Для подачи (отбора) рабочей среды к прорезям 9 силовых элементов дополнительной обоймы 4 используют передаточные коллекторы, пазы 11 которых расположены на шаровой опоре 1 и выполнены соосно с виртуальной осью вращения обоймы 4 (ось X), а торцы 12 каналов 10 подачи (отбора) рабочей среды размещены на дополнительной обойме 4 таким образом, что при любом положении обоймы 4 относительно шаровой опоры 1 они взаимодействуют с пазами 11, образуя герметизированные полости, через которые рабочая среда поступает (отбирается) от штуцеров 2 через каналы 10 к прорезям 9. При этом прорези 9 так же, как и при рассмотрении привода обоймы 4, располагают противонаправленно и симметрично относительно виртуальной оси вращения (ось Y) дополнительной обоймы 5, создавая таким образом уравновешенную силовую систему, исключающую прижимание поверхности обоймы 4 к внутренней поверхности шаровой опоры 1. Так, например, для поворота обоймы 5 по часовой стрелке вокруг оси Y рабочую среду под давлением подают в верхние части правых и нижние части левых прорезей 9 (см. фиг. 3). Возникающие при этом силы прижатия дополнительной обоймы 4 к шаровой опоре 1 взаимно компенсируются. Под действием давления на лопатки 8 дополнительной обоймы 5 она поворачивается в данном примере по часовой стрелке вокруг оси Y. Реверс вращения обоймы 5 осуществляют за счет реверсирования потоков рабочей среды через штуцера 2.
Для поворота шарового пальца 6 (см. фиг. 4) вокруг оси Z используют пару штуцеров 2: в один из них подают рабочую среду под давлением, а из другого - рабочую среду отбирают. При повороте шарового пальца 6, например, по часовой стрелке вокруг оси Z, рабочую среду под давлением подают в один из штуцеров 2, связанный с торцом 13 на шаровой опоре 1, который при любом положении дополнительной обоймы 4 примыкает к торцу 14 на ее внешней поверхности, поскольку оба эти торца расположены на виртуальной оси вращения дополнительной обоймы 4. Далее рабочая среда через канал 10 поступает в торец 15 дополнительной обоймы 4, который примыкает к торцу 16 на дополнительной обойме 5. Оба эти торца (15 и 16) каналов 10 подачи (отбора) рабочей среды расположены соосно виртуальной оси вращения дополнительной обоймы 5, поэтому их взаимное примыкание сохраняется при любом взаимном положении дополнительных обойм 4 и 5. Через торец 16 по каналам 10 рабочая среда попадает в прорези 9 дополнительной обоймы 5, расположенные симметрично относительно виртуальной оси ее вращения. Здесь рабочая среда распределяется так, что силы прижатия обоймы 5 к обойме 4 взаимно компенсируются, то есть рабочую среду подают в правую часть левых прорезей и одновременно в левую часть правых прорезей (см. фиг. 4). При этом в силовых элементах, образованных прорезями 9 дополнительной обоймы 5 и лопатками 8 шарового пальца 6, возникает крутящий момент, поворачивающий последний в данном случае по часовой стрелке вокруг оси Z. Отбор рабочей среды осуществляют аналогично ее подаче с использованием противолежащих торцов 13-16. Для реверсирования направления движения пальца 6 реверсируют подачу (отбор) рабочей среды через штуцера 2.
Описанные перемещения всех элементов шарнирного механизма манипулятора независимы друг от друга и могут выполняться одновременно. Использование в качестве рабочей среды сжатого газа, например, воздуха, дает возможность создать шарнирный механизм с «мягкими» силовыми характеристиками, обусловленными сжимаемостью газа в отличии от несжимаемости жидкости.
Источники информации
1. Патент MD 4619, МПК B25J 11/00, B25J 17/00, Mecanism articulat al manipulatorului (Шарнирный механизм манипулятора).
2. Авторское свидетельство СССР №1569232, МПК B25J 17/00, Приводной шарнир манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Перфузионный насос для перекачивания крови | 2021 |
|
RU2778066C1 |
| Гидроаккумулятор | 2021 |
|
RU2770661C1 |
| Устройство регулирования температурного режима элементов технологического оборудования | 2024 |
|
RU2839441C1 |
| АГРЕГАТ ДЛЯ БЕСКОНТАКТНОГО ИМПУЛЬСНОГО ИНЪЕКТИРОВАНИЯ ЖИДКИХ ВЕЩЕСТВ В ПОЧВУ И ИНЪЕКТОР ЖИДКИХ ВЕЩЕСТВ | 1992 |
|
RU2038731C1 |
| Приводной шарнир манипулятора | 1985 |
|
SU1329964A1 |
| РОТОРНО-ПУЛЬСАЦИОННЫЙ АППАРАТ АГАФОНОВА | 1999 |
|
RU2158628C1 |
| Устройство для ввода жидких реагентов в трубопровод | 2016 |
|
RU2636356C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ РАМОК С ТАБАКОМ В СУШИЛЬНУЮ КАМЕРУ | 1991 |
|
RU2019983C1 |
| БУРОВОЙ СНАРЯД | 1996 |
|
RU2158344C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
Изобретение относится к области робототехники. Шаровой механизм манипулятора содержит выходное звено, закрепленное на шаровом пальце, шаровую опору с каналами подачи и отбора рабочей среды и с проточками, взаимодействующими с лопатками на сопряженной шаровой поверхности и образующими с ними герметичные полости, связанные с каналами подачи и отбора рабочей среды. Между шаровым пальцем и шаровой опорой установлены две дополнительные шаровые обоймы, выполненные с возможностью поворота во взаимно перпендикулярных плоскостях. Каждая из обойм оснащена четырьмя приводными лопатками, установленными попарно симметрично относительно оси ее вращения, и проточками, взаимодействующими с приводными лопатками на смежных шаровых поверхностях. Первая обойма своими приводными лопатками взаимодействует с проточками шаровой опоры, а проточками - с приводными лопатками второй обоймы, которая своими проточками взаимодействует с приводными лопатками шарового пальца. На обеих шаровых обоймах и на шаровой опоре размещены передаточные коллекторы, формирующие неразрывные потоки подачи и отбора рабочей среды к прорезям подвижных шаровых обойм и выполненные в виде пар взаимно сопряженных дуговых пазов и торцов каналов подачи и отбора рабочей среды, или пар взаимно примыкающих торцов каналов подачи и отбора рабочей среды, расположенных диаметрально противоположно и коаксиально осям вращения смежных обойм. Изобретение обеспечивает расширение функциональных возможностей шарнирного механизма. 4 ил.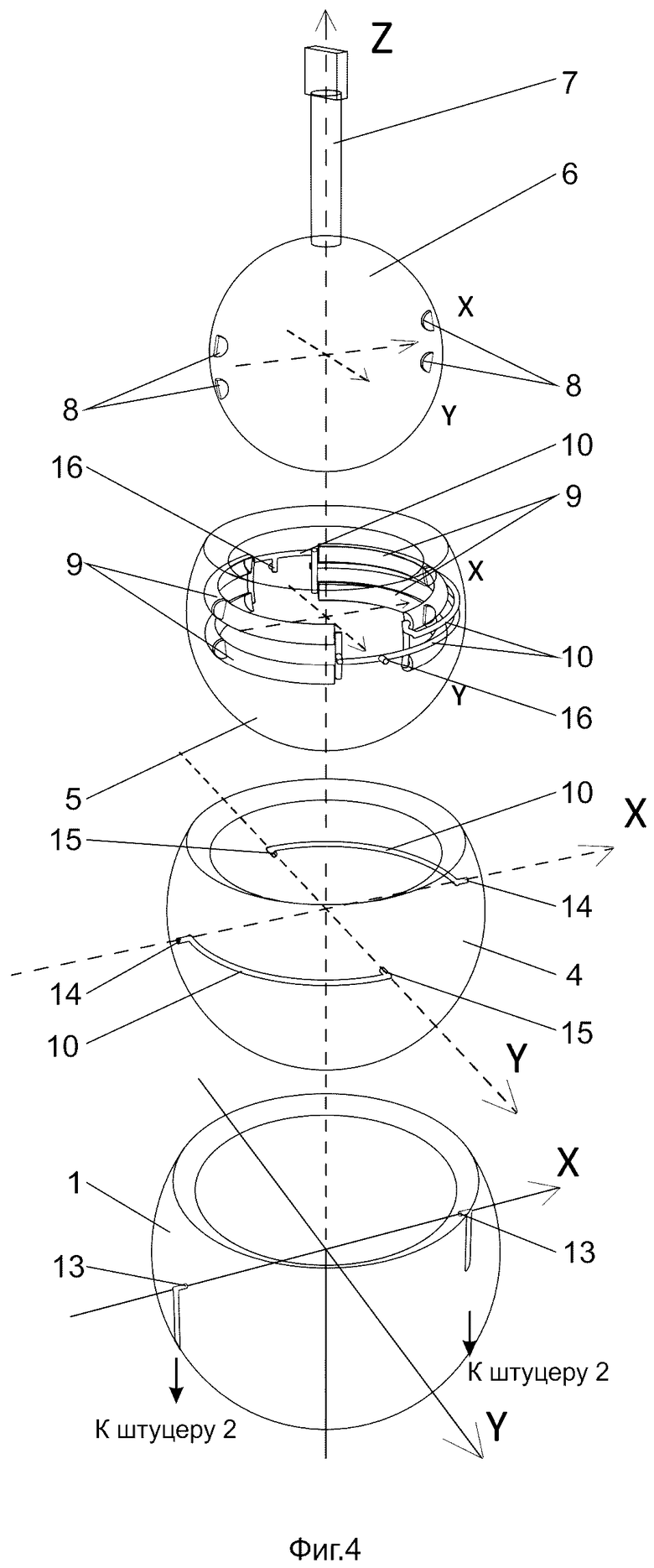
Шарнирный механизм манипулятора, содержащий выходное звено, закрепленное на шаровом пальце, шаровую опору с каналами подачи и отбора рабочей среды и с проточками, взаимодействующими с лопатками на сопряженной шаровой поверхности и образующими с ними герметичные полости, связанные с каналами подачи и отбора рабочей среды, отличающийся тем, что между шаровым пальцем, дополнительно оснащенном четырьмя приводными лопатками, установленными попарно симметрично относительно оси его вращения, и шаровой опорой установлены две дополнительные шаровые обоймы, выполненные с возможностью поворота во взаимно перпендикулярных плоскостях, причем каждая из обойм оснащена четырьмя приводными лопатками, установленными попарно симметрично относительно оси ее вращения, и проточками, взаимодействующими с приводными лопатками на смежных шаровых поверхностях, а именно первая обойма, считая от шаровой опоры, своими приводными лопатками выполнена взаимодействующей с проточками шаровой опоры, а проточками - с приводными лопатками второй обоймы, которая выполнена взаимодействующей своими проточками с приводными лопатками шарового пальца, при этом на обеих шаровых обоймах и на шаровой опоре размещены передаточные коллекторы, формирующие неразрывные потоки подачи и отбора рабочей среды к прорезям подвижных шаровых обойм и выполненные в виде пар взаимно сопряженных дуговых пазов и торцов каналов подачи и отбора рабочей среды или пар взаимно примыкающих торцов каналов подачи и отбора рабочей среды, расположенных диаметрально противоположно и коаксиально осям вращения смежных обойм.
| Приводной шарнир манипулятора | 1987 |
|
SU1569232A1 |
| ПЕРЕПЛЕТ С ЗАЖИМНЫМИ ПРУЖИНАМИ | 1925 |
|
SU4619A1 |
| Шаровая опора исполнительного органа | 1980 |
|
SU956272A1 |
| Станок для забивки спиц в ступицу колеса | 1928 |
|
SU27181A1 |

