[01] Область техники
[02] Изобретение относится к способам управления работой вычислительных устройств, используемых в автоматизированных системах промышленного предприятия.
[03] Уровень техники
[04] В применяемых в настоящее время решениях по управлению вычислительными устройствами предусмотрены такие действия, как распараллеливание вычислений, когда функции расчета распределяют между несколькими узлами по определенным критериям, ввод и подготовка исходных данных для расчета, расчет, сбор результатов расчета, а также взаимодействие с системами мониторинга, управления и внешнего управления. Такое управление связано с необходимостью использования сравнительно больших вычислительных мощностей микропроцессорных устройств релейной защиты, что повышает нагрузку и снижает быстродействие решения задач.
[05] В патенте США US 5771374, 23.06.1998 (наиболее близкий аналог) описан способ реализации работы системы диспетчерского управления и сбора данных с использованием контроллера управления. Указанный контроллер определяет состав функций, которые необходимо выполнять в соответствии с заданными настройками и реализует запуск функций с учетом заданных величин времени выдержки. При этом контроллер имеет ряд входов событий, подключенных к буферу прерывания, и циклический буфер, содержащий последовательные места хранения прерываний. При поступлении сигнала события на входе контроллера и генерации прерываний их сохраняют в циклическом буфере и осуществляют вставку индикатора буфера в новом месте, определяемом событием. При этом определяют время выдержки и выбирают местоположение в смещении буфера, соответствующего заранее определенному возрастающему временному окну в соответствии со временем выдержки. Указанный способ реализует циклическое выполнение функции автоматики и не может быть использован для реализации работы систем, в которых состав функций меняется в ходе эксплуатации. При этом аналог не решает проблему повышенной вычислительной нагрузки на микропроцессорное устройство (вычислительный модуль) контроллера.
[06] Раскрытие сущности изобретения
[07] Техническими проблемами, на решение которых направлено заявленное изобретение, является высокая нагрузка на вычислительный модуль, низкая эффективность использования ресурсов, а также недостаточное быстродействие работы.
[08] Техническим результатом заявленного способа является снижение нагрузки на вычислительный модуль системы автоматики с изменяемым составом функций, повышение эффективности использования вычислительный ресурсов и быстродействия выполнения операций.
[09] Указанный технический результат достигается в заявленном изобретении за счет того, что способ управления вычислительным модулем системы автоматики, включающий следующие этапы:
[010] (I) получение дополнительным вычислительным модулем списка функций автоматики, которые необходимо выполнить вычислительному модулю;
[011] (II) определение посредством дополнительного вычислительного модуля для каждой функции автоматики величины выдержки времени, которая используются в алгоритме выполнения функции автоматики;
[012] (III) ранжирование функций автоматики посредством дополнительного вычислительного модуля по критерию возрастания выдержки времени;
[013] (IV) установку посредством дополнительного вычислительного модуля таймеров запуска и выполнение посредством вычислительного модуля функций автоматики в следующем порядке: - функции автоматики, действующие на отключение оборудования и передающие команды управления без выдержки времени; - функции автоматики, относящиеся к резервированию отказа управления оборудованием; - функции автоматики, имеющие выдержку времени перед применением управляющего воздействия, в порядке увеличения выдержки времени.
[014] В частном случае реализации изобретения на этапе (IV) при установке таймеров запуска в случае, если функция автоматики помимо сигналов управления имеет промежуточные сигналы блокировки и/или торможения, и/или ускорения других функций автоматики, порядок ее выполнения определяют исходя из времени подачи первого из сигналов. Такие сигналы сохраняются в буфере событий с меткой времени равной метке времени принятого из буфера сигнала измерений. Кроме того, в частном случае реализации изобретения этап (I) получения списка функций автоматики реализуют непрерывно.
[015] Краткое описание чертежей
[016] Изобретение поясняется фигурами, где
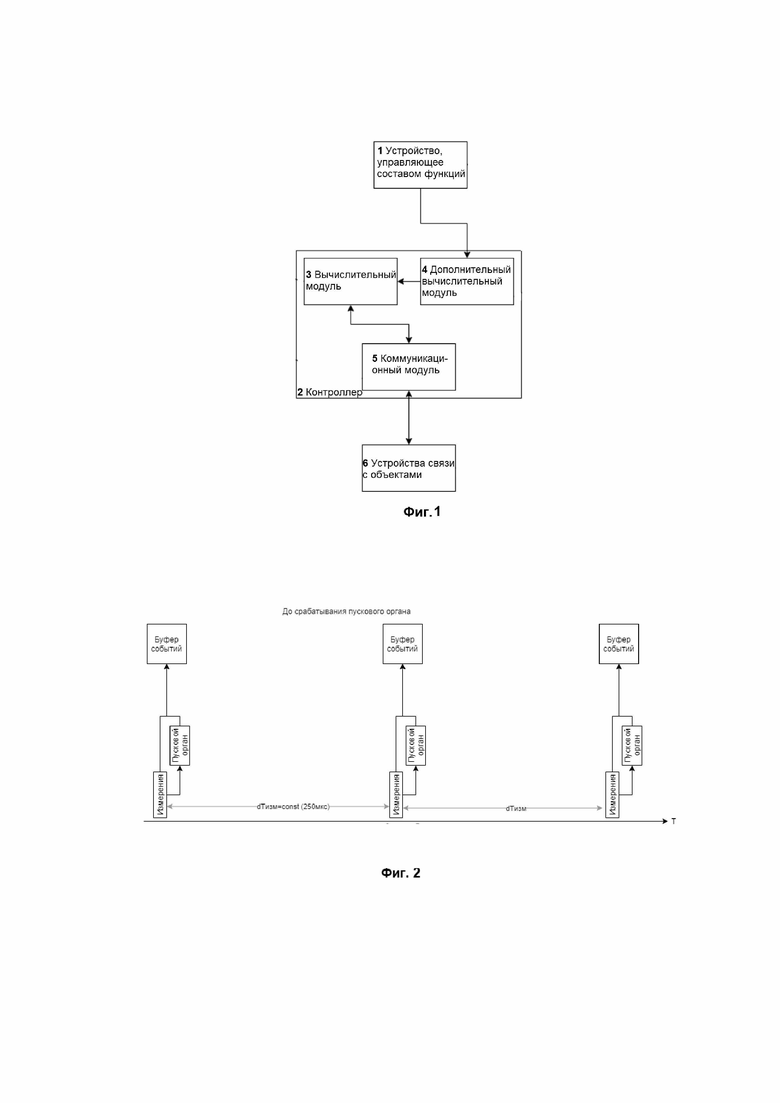
[017] На фиг. 1 показана принципиальная схема системы для реализации заявленного способа,
[018] На фиг. 2 показана временная диаграмма процесса запуска функций до срабатывания пускового органа,
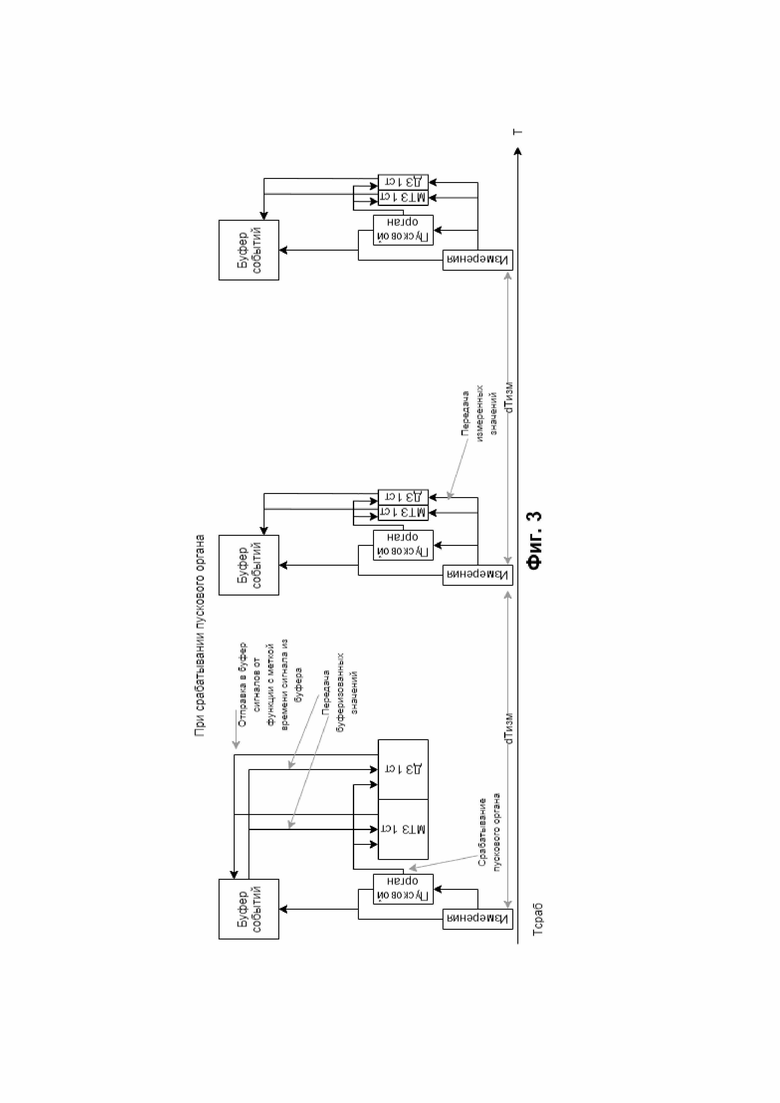
[019] На фиг. 3 показана временная диаграмма процесса запуска функций при срабатывании пускового органа,
[020] На фиг. 4 показана временная диаграмма процесса запуска функций после выдержки времени.
[021] Элементы на фигуре обозначены следующими позициями:
1 - устройство, управляющее составом выполняемых функций;
2 - контроллер управления;
3 - вычислительный модуль;
4 - дополнительный вычислительный модуль;
5 - коммуникационный модуль;
6 - устройства связи с объектами управления.
[022] Осуществление изобретения
[023] Заявленный способ может быть реализован с помощью системы управления, показанной на фигуре 1. Система включает устройство, управляющее составом выполняемых функций автоматики (1), контроллер управления (2) и устройства связи с объектами управления (6). В состав контроллера управления (2) входит основной вычислительный модуль (3) (далее по тексту - вычислительный модуль), дополнительный вычислительный модуль (4), связанный с устройством (1) и модулем (3), а также коммуникационный модуль (5), связанный с модулем (3) и устройствами (6).
[024] Устройство (1) может представлять собой вычислительное устройство (может быть представлено вычислительным модулем в составе другого устройства), осуществляющее взаимодействие по локальной вычислительной сети с другими устройствами типа (1), (2) и (6) для определения состава выполняемых в каждом устройстве (2) функций автоматики или защиты и предназначено для формирования списка выполняемых функций автоматики. Вычислительный модуль (3) представляет собой микропроцессорное устройство, которое выполняет запуск функций автоматики. Дополнительный вычислительный модуль (4) также является микропроцессорным устройством, обеспечивающим обработку данных функций и задание приоритета их выполнения с целью снижения нагрузки на вычислительным модуль (3). Коммуникационный модуль (4) предназначен для передачи управляющих сигналов с контроллера (2) к объектам управления. Устройства связи (6) обеспечивают сопряжение системы непосредственно с каждым из управляемых объектов (оборудованием).
[025] Заявленный способ включает следующие этапы:
[026] I). Устройство (1) определяет состав функций автоматики, которые необходимо выполнять в соответствии с алгоритмом распределения функций автоматики по доступным устройствам автоматики (описание алгоритма выходит за рамки патента), и передает данные в дополнительный вычислительный модуль (4).
[027] II). Дополнительный вычислительный модуль (4) для каждой функции автоматики определяет величины выдержки времени, которые используются в алгоритме выполнения функции автоматики.
[028] III). Дополнительный вычислительный модуль (4) ранжирует функции автоматики по критерию возрастания выдержки времени.
[029] IV). Посредством дополнительного вычислительного модуля (4) осуществляется настройка таймеров запуска функций автоматики в следующем порядке:
[030] - сначала отбираются функции автоматики, действующие на отключение оборудования и передающие команды управления без выдержки (например первая ступень дистанционной защиты (ДЗ), 1-я ступень максимальной токовой защиты (МТЗ); токовая отсечка и т.д.).
[031] - далее реализуются функции автоматики, относящиеся к резервированию отказа управления оборудованием (устройство резервирования отказа выключателя, УРОВ); и
[032] - затем следуют функции автоматики, имеющие выдержку времени перед применением управляющего воздействия в порядке увеличения выдержки времени (например, вторая и следующие ступени дистанционной защиты, вторая и следующие ступени максимальной токовой защиты, автоматика определения места повреждения (ОМП), автоматическое повторное включение (АПВ) линий и др.).
[033] В случае если функция автоматики помимо сигналов управления оборудования имеет промежуточные сигналы блокировки, торможения или ускорения других функций автоматики, порядок ее выполнения выбирается исходя из времени подачи первого из сигналов.
[034] Полученные сигналы от функций передаются в виде управляющих команд объектам системы через модуль (5) и устройства (6) воздействия для реализации функций автоматики.
[035] При этом процессы получения и обработки данных модулем (4) происходят непрерывно (в динамическом режиме), что позволяет осуществлять управление вычислительным модулем (3) системы автоматики, в которой состав выполняемых функций меняется в процессе эксплуатации.
[036] Пример реализации способа
[037] Изобретение иллюстрировано на примере системы релейной защиты и автоматики воздушных и кабельных линий с односторонним питанием. Устройство (1) передает в дополнительный вычислительный модуль (3) список функций автоматики:
[038] Устройство защиты и автоматики получает команду на выполнение следующего набора функций.
[039] 1) Функции релейной защиты, предназначенные для предотвращения повреждения оборудования вследствие возникновения коротких замыканий в электрической сети:
[040] - Дистанционная защита (ДЗ) (1, 2, 3 ступень),
[041] - Максимальная токовая защита (МТЗ) (1, 2, 3 ступень),
[042] 2) Функции автоматики, предназначенные для обеспечения бесперебойной работы энергосистемы после возникновения аварийных ситуаций:
[043] - устройство резервирования отказа выключателя (УРОВ),
[044] - автоматическое повторное включение (АПВ)
[045] - определение места повреждения - (ОМП).
[046] Дополнительный вычислительный модуль ранжирует функции по следующим критериям:
[047] 1) по пусковому органу, приводящему к запуску функций:
[048] группа 1 - пусковой орган реагирует на измерения токов и напряжений одного присоединения: ДЗ 1-3 ступени, МТЗ 1-3 ступени,
[049] группа 2 - пусковой орган реагирует на изменение дискретного сигнала: АПВ, УРОВ, ОМП;
[050] 2) по времени выдержки функции перед применением управляющего воздействия:
[051] группа 1: ДЗ 1 ступени (0 с), МТЗ 1 ступени (0 с), ДЗ 2 ступени (0,5 с), МТЗ 2 ступени (0, 5 с), ДЗ 3 ступени (1,5 с), МТЗ 3 ступени (2 с),
[052] группа 2: УРОВ (0 с), АПВ (1 с), ОМП (10 с).
[053] В нормальном режиме работы в момент приема измерений модулем (3) осуществляется только проверка срабатывания пусковых органов как показано на временной диаграмме на фиг.2.
[054] После ранжирования запуск функций осуществляется в следующем порядке (см. Фиг. 3) от момента срабатывания пускового органа, сигнализирующего о возможном возникновении аварийного процесса:
[055] 1) на каждый получаемый пакет данных измерений от устройства 6 запускаются функции работающие без выдержки времени (ДЗ 1 ступени, МТЗ 1 ступени, УРОВ) в течение настраиваемого промежутка времени (200 мс) гарантирующего срабатывание быстродействующей защиты, остальные функции при этом не запускаются, но данные измерений для их работы буферизируются;
[056] 2) по прошествии промежутка времени п. 2 выполнение функций защиты без выдержки времени по факту приема пакетов прекращается и начинается выполнение нового набора функций работающих без выдержки времени и с выдержкой времени до 0.5 с по таймеру (5 мс - настраиваемый параметр) без привязки к событию получения пакета с измерениями (см. фиг. 4), при этом в качестве входных данных им сначала передаются измерения, полученные с момента срабатывания пускового органа и буфери-зированные в п. 1, затем текущие измерения буферизированные в период между запусками функций;
[057] 3) за 200 мс (настраиваемый параметр) до наступления времени выдержки следующих защит они запускаются в работу по таймеру (с увеличенным настраиваемым интервалом - более 10 мс) и им передаются сначала буферизированные измерения с момента срабатывания пускового органа, затем текущие измерения, буферизируемые в период между запусками функций. При этом если функции защит выдают блокирующие другие функции (которые в настоящий момент не запускаются) сигналы, то эти сигналы также записываются в буфер с меткой времени, соответствующей исходному сигналу из буфера, для которого такой блокирующий сигнал был сформирован. Выполнение функций защит прекращается после снятия сигнала от пускового органа. Вычислительный модуль (3) получает обработанные данные и передает управляющие команды к соответствующим объектам в заданной последовательности.
[058] Таким образом, заявленный способ реализует спорадический запуск и задание последовательности выполнений функций автоматики, в соответствии с величиной выдержки времени каждой из запускаемых функций автоматики. При этом решена задача оптимизации работы функций автоматики в зависимости от приоритета с целью снижения вычислительной нагрузки на микропроцессорного устройство автоматики (вычислительного модуля).

Изобретение относится к способу управления вычислительным модулем системы автоматики. Технический результат заключается в оптимизации работы функций автоматики. Способ содержит: (I) получение дополнительным вычислительным модулем (4) списка функций автоматики, которые необходимо выполнить вычислительному модулю (3); (II) определение посредством дополнительного вычислительного модуля (4) для каждой функции автоматики величины выдержки времени, которая используется в алгоритме выполнения функции автоматики; (III) ранжирование функций автоматики посредством дополнительного вычислительного модуля (4) по критерию возрастания выдержки времени; (IV) установку посредством дополнительного вычислительного модуля (4) таймеров запуска и выполнение посредством вычислительного модуля (3) функций автоматики в следующем порядке: функции автоматики, действующие на отключение оборудования и передающие команды управления без выдержки времени, функции автоматики, относящиеся к резервированию отказа управления оборудованием, и функции автоматики, имеющие выдержку времени перед применением управляющего воздействия, в порядке увеличения выдержки времени. 2 з.п. ф-лы, 4 ил.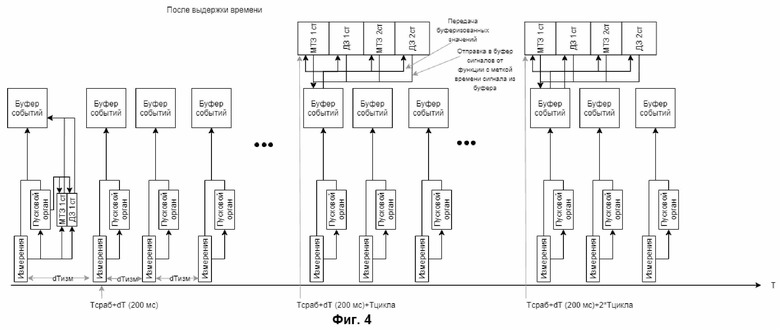
1. Способ управления вычислительным модулем (3) системы автоматики, включающий следующие этапы:
(I) получение дополнительным вычислительным модулем (4) списка функций автоматики, которые необходимо выполнить вычислительному модулю (3);
(II) определение посредством дополнительного вычислительного модуля (4) для каждой функции автоматики величины выдержки времени, которая используется в алгоритме выполнения функции автоматики;
(III) ранжирование функций автоматики посредством дополнительного вычислительного модуля (4) по критерию возрастания выдержки времени;
(IV) установку посредством дополнительного вычислительного модуля (4) таймеров запуска и выполнение посредством вычислительного модуля (3) функций автоматики в следующем порядке:
- функции автоматики, действующие на отключение оборудования и передающие команды управления без выдержки времени,
- функции автоматики, относящиеся к резервированию отказа управления оборудованием, и
- функции автоматики, имеющие выдержку времени перед применением управляющего воздействия, в порядке увеличения выдержки времени.
2. Способ по п.1, характеризующийся тем, что на этапе (IV) при установке таймеров запуска в случае если функция автоматики помимо сигналов управления имеет промежуточные сигналы блокировки и/или торможения, и/или ускорения других функций автоматики, порядок её выполнения определяют исходя из времени подачи первого из сигналов, такие сигналы сохраняются в буфере событий с меткой времени, равной метке времени принятого из буфера сигнала измерений.
3. Способ по п.1, характеризующийся тем, что этап (I) получения списка функций автоматики реализуют непрерывно.
| Способ перераспределения функций между устройствами автоматики при возникновении неисправностей в автоматизированной системе | 2020 |
|
RU2740683C1 |
| US 5771374 A1, 23.06.1998 | |||
| CN 102929196 A, 13.02.2013 | |||
| CN 110012181 A, 12.07.2019 | |||
| US 6397272 B1, 28.05.2002. | |||

