Способ относится к электротехнике и предназначен для автоматического управления технологическим оборудованием, связанным с программно-техническими комплексами на промышленных объектах с использованием такого специализированного программного обеспечения, посредством которого осуществляют автоматическую настройку алгоритмов управления. При этом имеется в виду управление, которое осуществляют на основе анализа топологии схемы соединения технологического оборудования в момент запроса на осуществление операции, совершаемой над одним из элементов технологического оборудования. Преимущественно способ относится к оперативной блокировке разъединителей на электрических подстанциях, в том числе к устройствам предотвращения сбоев процесса управления оборудованием промышленных объектов путем блокировки неверных действий оператора, связанных с управлением, которые могут привести к выходу из строя оборудования, нарушению технологического процесса или опасности для персонала.
В типовом решении системы управления объектом используют оперативную блокировку управления путем использования управляющих и других контроллеров сбора данных с модулями ввода, при этом используют в системе ОБР собранные данные – передают их в систему телемеханики ССПИ или АСУТП по стандартным протоколам МЭК 60870-5-101/104, где логика оперативной блокировки системы управления параметрируется в текстовом виде логическими формулами, имеющими индентификаторы сигналов, далее из полученных формул в автоматическом режиме получают построение визуальных логических блоков, указывающих на разрешение или блокировку системы управления (Интернет. Электромагнитная блокировка разъединителей. http://www.spbet.narod.ru/studies/oborud2.htm).
Управление электромагнитной блокировкой заключается в управлении подачей питания ±220В на электромагнитные замки (ЭМЗ) приводов разъединителей и их заземляющих ножей в зависимости от определенного положения выключателей, разъединителей и заземляющих ножей, чьи контакты-повторители (КСА) последовательно задействованы в определенной логике подачи питания на ЭМЗ. Система управления блокировкой разъединителей на базе ПТК ТМИУС КП обеспечивает сбор информации о состоянии положения выключателей, разъединителей и заземляющих ножей, их логическую обработку на предмет соблюдения необходимых условий для выдачи команды телеуправления на включение цепи питания ±220В электромагнитных замков ЭМЗ приводов разъединителей и их заземляющих ножей. В схеме программируемой блокировки разъединителей используется минимальное количество контактов КСА, причем для различных логических схем одни и те же контакты умножаются программно. Контроль изменения состояния выключателей и разъединителей проводят в системе по состоянию одновременно взаимно-противоположных контакта КСА – нормально-разомкнутому (НР) контакту и нормально-замкнутому (НЗ) контакту, что исключает ошибку в оценке состояния положения аппарата, а в случае неопределенного его положения, когда два контакта КСА находятся одновременно в положении “включено” или “выключено” - на пульте контроля объекта указывается конкретное место неисправности. Это сокращает время на поиск неисправности и производство переключений (Программируемая оперативная блокировка разъединителей. Система оперативной блокировки разъединителей. ЦентрЭнергоАвтоматика.
https://www.ceaenergo.ru/index.php?Itemid=120).
Внедрение системы управления электромагнитной блокировкой разъединителей с применением программируемых контроллеров позволяет обеспечить диагностику цепей телесигнализации и телеуправления; диагностику работы контроллеров системы; ввести дополнительный объем телемеханических параметров положения выключателей, разъединителей и заземляющих ножей в существующую систему телемеханики и АСДУ на основе информационного кодового взаимодействия по стандартным протоколам МЭК 870-5-101, Modbus TCP/IP или МЭК 870-5-104.
В известной онлайн блокировке автоматики подстанции и способе ее осуществления программная блокировка разъединителей с поддержкой информационной модели МЭК 61850 также требует настройки алгоритмов под конкретный объект. Согласно IEC 61850, сетевая работа коммутатора требует соответствующего механизма блокировки для реализации безопасных связанных функций. В сравнении с обычным порядком коммутации и киберблокировочными устройствами, используемыми в Китае, онлайн блокировка имеет более высокую надежность и эффективность в реальном времени, но трудность заключается в том, что вычислительные и запоминающие ресурсы в дуге СВУ слишком ограничены для быстрого и точного расчета результатов блокировки, когда присутствуют сравнительно высокие требования к выполнению алгоритмов в реальном времени. Информационно-коммуникационные структуры логического узла CILO моделируются на основе стандарта IEC 61850. Имеется метод получения состояния коммутационного аппарата, формирование команды блокировки и распределенная операция управления блокировкой. Предложен способ реализации онлайн блокировки, интегрированной с контролем доступа. Правила порядка переключения вводятся в расширенный срок действия сертификата атрибута PMI через пользовательский интерфейс. Конфигурация правил блокировки может быть выполнена при одновременном получении прав доступа. Анализ работы в реальном времени показывает, что метод может удовлетворять требованиям к указанным функциям (Naih Lio. Онлайн блокировка автоматики подстанции и способ её осуществления. Автоматизацияэлектроэнергетическихсистем30(23):5863.Декабрь,2006.
https://www.researchgate.net/publication/287765843_Online_Interlocking_of_Substation_Automation_and_Its_Mode_of_Implementation).
Из патентной документации известен способ обеспечения электробезопасности при производстве оперативных переключений на энергообъектах, причем данный способ характеризуется тем, что для повышения надежности работы электромагнитной блокировки и снижения затрат на монтаж и пусконаладочные работ при производстве оперативных переключений на энергообъектах определяют положения коммутационных аппаратов, передают по радиоканалу положения коммутационного аппарата, формируют логическое выражение для каждого коммутационного аппарата и подключают питание к блок-замку привода коммутационного аппарата при истинном значении логического выражения. При этом данные о положении функционально связанных коммутационных аппаратов накапливают в местах расположения их приводов в локальных пунктах, передачу данных с локального пункта проводят только по запросу с диспетчерского пункта, разрешение на подключение питания к блок-замку передают с диспетчерского пункта посредством радиоканала, при этом питание блок-замков осуществляют от встроенных автономных источников (RU 2557809 С2, 10.05.2015).
Известен способ и система для рекомендации действий оператору, которые относятся к операциям, контролю и диагностике механического/электрического оборудования и, в частности, к системам и способам автоматического информирования операторов об аномальном поведении оборудования. Изобретение решает задачу в том, что неизвестны системы контроля для оценки температуры оборудования в режиме онлайн, при этом контролируется только измеренная температура. Без сравнения измеренного значения с ожидаемым значением динамический базовый уровень и физическая картина для определения порогов для выдачи предупреждения об отклонении являются неизвестными. Без этого расчета доступны только статические пороги, основанные на постоянных отклонениях от заранее заданных значений. Кроме того, отсутствие оценки температуры оборудования затрудняет поиск неисправностей. Например, может быть сделано определение в отношении источника отклонения ожидаемого значения от измеренного значения и в отношении того, является ли это отклонение следствием недостаточного охлаждения, утечки или изношенных уплотнений. Кроме того, быстрое изменение рабочих условий или очень медленное изменение рабочих условий может затруднять распознавание оператором аномальных условий или того, какие изменения в эксплуатации могут быть сделаны для смягчения аномальных условий (RU 2657047 С2, 09.06.2018). Компьютерный способ контроля и диагностики аномалий рабочего оборудования, реализованный с использованием вычислительного устройства, соединенного с интерфейсом пользователя и запоминающим устройством, включает хранение множества наборов правил в запоминающем устройстве, которые относятся к рабочему оборудованию и содержат, по меньшей мере, одно правило в виде выражения связи выходных данных, поступающих в реальном времени, с входными данными, поступающими в реальном времени, причем выражение связи касается температуры оборудования. Способ включает также прием входных данных, поступающих в реальном времени, и входных данных предыстории от системы контроля состояния, связанной с оборудованием, причем входные данные относятся к источникам подачи к оборудованию носителя тепла и оценку значения температуры оборудования с использованием входных данных, относящихся к температуре оборудования. Технический результат изобретения – повышение надежности и точности для выдачи рекомендаций по эксплуатации и поиску неисправностей (RU 2657047 С2, 09.06.2018).
Известно централизованное интеллектуальное электронное устройство системы автоматизированной электрической подстанции объектов электроэнергетики, в котором для обеспечении надежности электропитания устройство системы автоматизации электрической подстанции содержит размещенные в корпусе модуль человеко-машинного интерфейса, соединенный с дисплеем с сенсорной панелью, модули релейной защиты и автоматики, модули счетчика учета электрической энергии и контроля качества электрической энергии, подключенные к общей шине питания, которая снабжена модулем резервирования шины питания, при этом модуль резервирования шины питания подключен к основному и резервному источникам питания, центральный процессор модуля снабжен постоянным запоминающим устройством, а модули РЗА и СУ выполнены с возможностью приема данных от источников измерений величин тока и напряжения системы автоматизации электрической подстанции (RU 2720318 С1, 28.04.2020).
Известен способ передачи рабочих данных и данных событий от множества компонентов электросети и энергетической системы в центральный орган управления электроэнергетической системы, который управляет электроэнергетической системой, включающий:передачу, по меньшей мере, частично по радиосвязи, рабочих данных в центральный орган управления электроэнергетической системы по рабочей шине, причем рабочие данные содержат по меньшей мере одно измерение, выполненное в режиме реального времени, напряжения, тока, активной мощности или реактивной мощности по меньшей мере для части электроэнергетической системы; и передачу по меньшей мере частично по радиосвязи данных событий в центральный орган управления электроэнергетической системы по шине событий, причем шина событий выполнена отдельно от рабочей шины, при этом данные событий являются отличными от измерений в режиме реального времени, причем получены из указанных измерений в режиме реального времени и содержат по меньшей мере одно аналитическое определение, касающееся работы электроэнергетической системы, основанное на указанном по меньшей мере одном измерении в режиме реального времени, при этом рабочие данные передают через рабочую шину и не передают через шину событий, а данные о событии передают через шину событий и не передают через рабочую шину. Анализируют по меньшей мере часть принятых данных; и направляют данные к рабочей шине или шине событий. По рабочей шине дополнительно передают данные о качестве электроэнергии, и/или надежности подачи электроэнергии, и/или состоянии ресурсов, и/или данные о нагрузке. Принимают и сохраняют рабочие данные с помощью сервера, связанного с рабочей шиной и шиной событий; анализируют с помощью сервера рабочие данные в отношении по меньшей мере одного правила; генерируют с помощью сервера по меньшей мере одно событие на основе указанного анализа; и пересылают с помощью сервера указанное по меньшей мере одно событие по меньшей мере к одному из указанных компонентов электросети и энергетической системы, с тем чтобы запустить самовосстановление по меньшей мере участка электроэнергетической системы (RU 2518178 C2, 10.06.2014).
Известен способ передачи главному компьютеру файлов описания устройства, при этом для гарантированного обеспечения версии файла устройства, требуемой для обеспечения поддержки конкретной версии периферийного устройства, способ включает в себя этапы: подключение периферийного устройства к главному компьютеру с возможностью обмена данными с целью установки периферийного устройства в системе управления технологическим процессом, получения данных, касающихся отсутствия в памяти главного компьютера версии файла описания устройства, соответствующей версии периферийного устройства, осуществления доступа к файлу описания устройства, содержащемуся в памяти периферийного устройства, и передачи файла описания устройства от периферийного устройства главному компьютеру. Устройство и машиночитаемый носитель информации реализуют описанный способ (RU 2608684 С2, 23.01.2017).
Известен способ контроля работы устройства управления объектом, в котором в процессе нормальной работы устройства проводится сбор и накопление контрольных сигналов в каждом из двух устройств управления, работающих синхронно, затем эти сигналы сравниваются между собой и при их совпадении разрешается выдача управления на объект. Дополнительно введены два режима контроля - при нормальной работе устройства и при его тестировании. Кроме проверки работы устройств при выполнении их основной функции, производится периодическая тестовая проверка работы устройства во всех режимах. После окончания тестирования логических блоков при условии его положительного результата восстанавливается нормальная работа устройства и выдаются сигналы разрешения управления. При отрицательном результате тестирования работа устройства прекращается, и выдаются сигналы запрещения управления. Длительность проведения тестирования и схема включения исполнительных устройств выбирается таким образом, чтобы последовательность действий тестового контроля не влияла на работу исполнительных устройств. Достигается повышение безопасности функционирования устройства (RU 2584354 С1, 10.04.2016).
Известен способ автоматизированного управления технологическим объектом с использованием средств вычислительной техники, в котором для упрощения процесса управления без снижения качества управления технологический процесс разбивают на промежуточные технологические состояния, выбираемые из условия неизменности для каждого состояния заданий дискретным и аналоговым контурам всех технологических узлов объекта. Управление каждым технологическим элементом осуществляют для каждого технологического состояния с помощью соответствующего данному технологическому состоянию индивидуального контура управления с одним и тем же для данного технологического элемента периферийным оборудованием (RU 2178578 С1, 20.01.2002).
Известна гибкая система автоматизации для переменных промышленных процессов, которая включает в себя программируемые контроллеры, которые связаны через подсистемы шины с переменными процесса, которые назначаются в цифровой или аналоговой форме. Подсистемы шины имеют коммуникационные интерфейсы для получения переменных процесса от программируемых контроллеров. Сигнал поиска назначается каждой переменной процесса в закодированной форме (US 5513095 A, 30.04.1996).
Известен способ управления многомерным объектом для систем автоматического управления (САУ) сложных объектов, в которых для регулирования нескольких параметров используется одно управляющее воздействие, причем с целью устранения забросов выходных координат объекта управления, обеспечения заданного качества переходных процессов включаемого канала системы, осуществляют формирование в каждом из ряда каналов управления сигналов, пропорциональных отклонению текущей величины регулируемого параметра от заданной, формирование на основе этих отклонений с помощью регуляторов параметров управляющих сигналов, выделение в качестве ведущего канала с наименьшей величиной управляющего сигнала и коррекция заданной величины регулируемого параметра в каждом из каналов, при этом эта коррекция осуществляется с помощью контура адаптации, который по разности управляющих сигналов замкнутого канала и данного канала приближает условия переключения каналов к требуемым эталонным, определяемым по отклонениям каналов (RU 2446299 С1, 27.03.2012).
Известен способ передачи данных по шине, система связи для осуществления данного способа и устройство автоматической защиты для предотвращения аварийной ситуации на объекте управления. Способ предусматривает автоматическое предотвращение аварийной ситуации на объекте управления, при этом способ содержит этапы, в процессе которых: осуществляют последовательную передачу данных по шине между модулями устройства, предназначенного для автоматического управления или защиты объекта управления, каждый из модулей содержит программируемое вычислительное устройство и интерфейсный блок, при этом по меньшей мере один из интерфейсных блоков настраивают для работы в режиме ведущего устройства и по меньшей мере два интерфейсных блока настраивают для работы в режиме ведомых устройств, после чего осуществляют обмен данными между модулями устройства в виде контрольного пакета, состоящего из служебных данных, или информационного пакета, состоящего из контрольного пакета и пакета данных, причем каждый интерфейсный блок, настроенный для работы в режиме ведомого устройства, содержит контроллер (RU 2705421 С1, 07.11.2019).
В известной оперативной блокировке разъединителей электрических подстанций известные средства блокировки используют для предотвращения аварий в системах управления промышленными объектами путем использования устройств автоматики с контроллером присоединения, причем к таким средствам относятся также, связанные с оперативной блокировкой разъединителей (стандарт STO 5694700729.200.80.210. Дата публикации 2015.https://www.fskees.ru/upload/docs.Интернет.http://www.ekrasib.ru/produktsiya/nppekra/ustroystva-prisoedinenia/135-kontroller prisoedineniya. https://kipia.info/programmiruemyie-logicheskie-kontrolleryi/kontroller-prisoedineniya-s-auv-%28bay-controller%29-aris-4212).
В другой редакции указанного стандарта раскрыты средства релейной защиты и автоматики, представляющие собой функционально завершенный алгоритм работы МП УРЗА, причем к таким средствам относятся действия, характеризующие способы защиты, в которых на основе информации, полученной от измерительных органов МП УРЗА и/или от других устройств (функций) РЗА, выявляют повреждения или отключения оборудования объектов, или выявляют другие ненормальные режимы работы объектов электросети и, в соответствии с заданными настройками, осуществляют действия направленные на предотвращение развития повреждений и на ликвидацию нарушения нормального режима, включая также действия на предотвращение изменения частоты электрического тока, напряжения, активной и реактивной мощности и иных параметров режима работы энергосистемы объекта (Интернет. Стандарт СТО 56947007-29.120.70.241-2017. Стандарт организации ПАО «ФСК ЕЭС». Технические требования к микропроцессорным устройствам, с.10, дата публикации 28.02.2017 с изменениями 11.12.2019 – аналог).
Указанным стандартом предусмотрены функции контроллера присоединения для приводов (стандарт СТО56947007-29.120.70.241-2017, пункт 19.1.1), посредством которого формируют отдельные команды: «Разрешить операцию»:
- для подачи напряжения на блок-замок электромагнитной блокировки или на обмотку реле блокировки;
- формирование команд «Разрешить операцию» выполняется в устройстве для каждого коммутационного аппарата, в том числе и для коммутационных аппаратов с ручным приводом;
- формируют команду посредством программной логики алгоритмов, с возможностью программирования в устройстве на основе положений ключей и коммутационных аппаратов принятых как на дискретных входах устройства, так и по состояниям переданных от других устройств (РЗА и АСУТП) по шине подстанции посредством GOOSE;
- блокирование или разрешение выдачи команды «Разрешить операцию» (разрешения управления) от устройства непосредственно в схему управления приводом коммутационного аппарата + действия по пункту СТО.19.1.2. команда «Выполнить управление» - для отключения-включения от АСУ ТП в цепи управления привода коммутационного аппарата.
Признаки известного и признаки представленного в данном описании изобретения относятся также к заданным действиям – способам предотвращения аварийных действий при оперативном управлении технологическими объектами, каждый из которых характеризуется тем, что перед включением системы управления объектом в работу, с целью предотвращения аварийных действий при оперативном управлении технологическим объектом сначала получают информацию от измерительных органов и/или от других устройств защиты и на основе полученной информации выявляют повреждения или отключения оборудования объекта, или выявляют другие ненормальные режимы работы объектов электросети и, в соответствии с заданными настройками, осуществляют действия направленные на предотвращение развития повреждений и на ликвидацию нарушения нормального режима, включая также действия на предотвращение изменения частоты электрического тока, напряжения, активной и реактивной мощности и иных параметров режима, а после устранения указанных неисправностей включают в работу систему управления технологическим объектом.
Аналогом представленного в данном описании способа является способ, раскрытый в указанном выше описании патента RU 2178578 С1, 20.01.2002.
Другим более близкими аналогом представленного в данном описании способа является способ, раскрытый в описании указанного выше стандарта СТО 56947007-29.120.70.241-2017. Стандарт организации ПАО «ФСК ЕЭС». Технические требования к микропроцессорным устройствам, с.10, пункты 19.1.1 и 19.1.2. дата публикации 28.02.2017 с изменениями 11.12.2019.
Данные аналоги и представленный в настоящем описании способ имеют общие признаки способа предотвращения аварийных действий при управлении технологическим объектом, при этом каждый способ характеризуется тем, что осуществляют сбор данных о состоянии технологического оборудования, передают данные о рабочих параметрах оборудования, осуществляют контроль за состоянием и управлением оборудования, разрешают или запрещают управление технологическим объектом.
Известные способы не в полной мере обеспечивают надежность защиты оборудования объектов вследствие того, что на подстанциях объектов отсутствуют устройства автоматики управления выключателями, объекты не имеют специализированного программного обеспечения, программная блокировка разъединителей требует ручного задания алгоритмов, подходящих исключительно для конкретного объекта, на котором применяется система блокировки, при этом известная блокировка не учитывает изменения объектов, например, не учитывает электрические схемы подстанций, установку переносных заземлителей, изменяемый состав технологического оборудования. В этой связи известные способы не в полной мере отвечают требованиям безопасности, поскольку требуют индивидуальной настройки параметров автоматизированной системы под каждый набор технологического оборудования на промышленном предприятии. Существенным недостатком способа блокировки с целью предотвращения аварий является то, что алгоритмы оперативной блокировки разъединителей электрических подстанций задаются вручную, что допускает возможность ошибок персонала, причем известные способы предусматривают задание алгоритмов и их корректировку каждый раз при изменении технологической схемы технологического объекта управления, в том числе при изменении состава управляемого оборудования объекта. Указанные в качестве аналогов известные способы требуют сложных специальных технических средств, связанных с большой трудоемкостью их отладки, при этом указанные технические средства разрабатывается индивидуально под конкретный объект. Сложность средств, трудоемкость их отладки, а также ограниченность использования исключительно для управления конкретным объектом существенно усложняют способ, сужают возможности его применения.
Техническим результатом представленного в данном описании способа является повышение безопасности управления промышленным объектом и снижение трудоемкости обслуживания объекта.
Техническим результат получен способом предотвращения аварийных действий при оперативном управлении технологическим объектом, характеризующимся тем, что осуществляют посредством автоматизированной системы управления сбор данных о состоянии оборудования через устройства связи с объектом и через технологическую локальную вычислительную сеть нижнего уровня, передают данные о рабочих параметрах оборудования в контроллеры присоединения, осуществляют через контроллеры присоединения контроль за состоянием и управлением оборудования, и осуществляют контроль за состоянием оборудования посредством локальной вычислительной сети верхнего уровня системы управления, причем до включения системы управления вводят в систему управления среднего уровня агенты удаленного управления оборудованием и дополнительный вычислительный модуль управления для запуска агентов удаленного управления оборудованием, при этом перед осуществлением удаленного управления осуществляют мониторинг первичного силового оборудования объекта, включенного в систему управления через множество устройств связи с объектом, при этом при запуске команды оперативного управления оборудованием используют агент удаленного управления для проверки показателей локального оборудования на соответствие его параметров разрешающим правилам управления, и если команда оперативного управления выдана в соответствии с разрешающими правилами оперативного управления и эти правила могут быть выявлены дополнительным вычислительном модулем управления объектом на основе локальных данных, и при этом может быть получен ответ, то управление первичным оборудованием посредством автоматизированной системы или разрешается или блокируется, а если локальных показателей состояния оборудования для расчёта соответствия правилам разрешения или блокирования оперативного управления недостаточно, то посредством первого агента отправляют запрос второму агенту, расположенному в другой локальной системе управления оборудования, соединенной электрической связью с оборудованием первой локальной системы, причем посредством первого агента запрашивают результат получения критерия, недостающего для выявления одного или нескольких правил принятия разрешающего или запрещающего решения, затем посредством второго агента, получившего запрос, при имеющемся у него достаточном объеме информации получают ответ второго агента на запрос первого агента, и при этом второй агент отправляет ответ первому агенту, либо передают запрос по локальной вычислительной сети следующему третьему агенту, причем посредством агентов отправляют запросы в указанной последовательности до момента опроса всех агентов, после чего в случае неполучения от агентов ответов на запросы в течение проводимого мониторинга управляющую команду посредством первого агента блокируют, а в случае получения первым агентом ответа на отправленный запрос и полученных ответов на запросы других агентов, посредством первого агента и дополнительного вычислительного модуля выявляют правила разрешения управления, разрешающие или запрещающие управление объектом
В процессе мониторинга каждый агент удаленного управления функционально связывают с контроллером присоединения локального оборудования объекта.
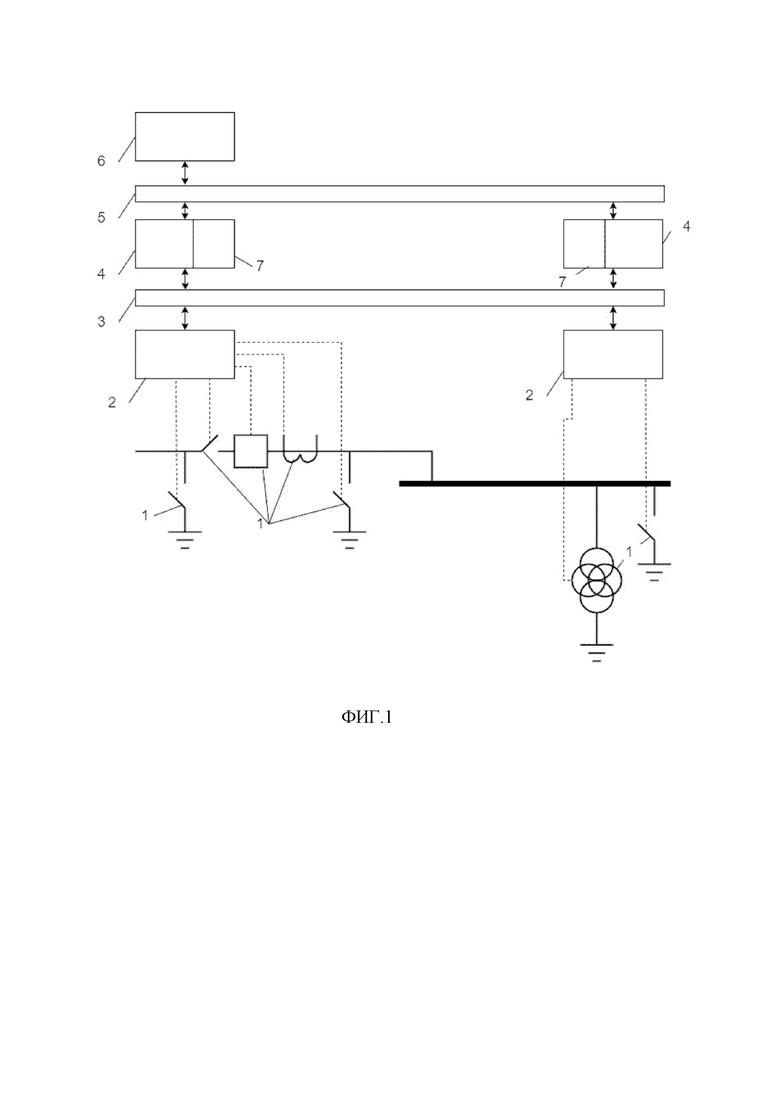
На фиг.1 показана схема, поясняющая способ предотвращения аварийных действий в системе автоматизированного управления объектом - один из примеров организации системы предотвращения аварийных действий в системе автоматизированного управления промышленным объектом путем оперативной блокировки управления коммутационными аппаратами электрической подстанции.
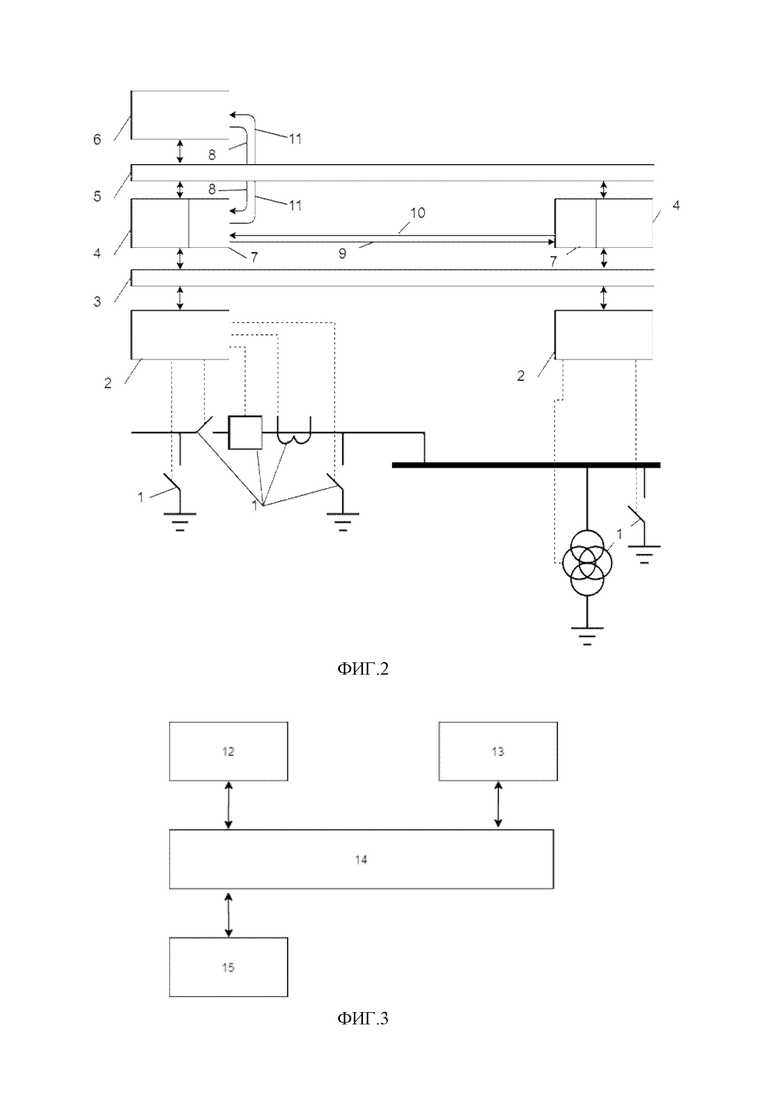
На фиг.2 показана схема последовательности обмена информацией между агентами удаленного управления мультиагентной системы управления.
На фиг.3 – устройство для реализации способа.
На схеме (фиг.1) условно представлена электрическая подстанция и её система управления с функциями контроля и управления оборудованием. В частности, представлено первичное оборудование 1, включающее разъединители, заземляющие ножи, выключатели, измерительные трансформаторы; локальное оборудование 2, представляющее собой устройство связи с объектом (УСО), выполненное в соответствии со стандартом МЭК 61850; локальное оборудование 3, представляющее собой локальную вычислительную сеть нижнего уровня - шину процесса по МЭК 61850; локальное оборудование 4, представляющее собой устройство управления среднего уровня, которое содержит контроллеры присоединения (не показаны). На схеме 1 показано также локальное оборудование 5, представляющее собой локальную вычислительную сеть верхнего уровня – шину станции по МЭК 61850; локальное оборудование 6, представляющее собой устройство управления АСУТП, включающее контроллер телемеханики, сервер АСУТП и автоматизированное рабочее место оперативного персонала (не показаны); по меньшей мере, два дополнительных вычислительных модуля 7, связанных с агентами удаленного управления мультиагентной системы управления и служащими для запуска этих агентов в составе контроллера присоединения. Каждый агент (агенты не показаны) представляет собой программу ЭВМ, которая является частью дополнительного вычислительного модуля 7 устройства управления промышленным объектом. Функции агента сводятся к разрешению или запрещению включать в работу автоматизированную систему управления объектом. Разрешение или запрещение осуществляют на основе анализа данных о состоянии оборудования объекта. При этом каждому агенту доступны только те данные, которые есть в устройстве управления среднего уровня. Посредством агента направляют запросы другим агентам с целью определения условий, которые не может определить сам агент - разрешено или запрещено управление объектом в каждый момент времени. Агенты вычислительных модулей 7 образуют мультиагентную систему в устройстве для реализации способа.
Мониторинг состояния первичного силового оборудования осуществляют посредством автоматизированной системы управления подстанцией УСО. УСО передает данные о состоянии оборудования в устройство управления нижнего уровня в соответствии с СТО 56947007-25.040.40.236-2016 «Правила технической эксплуатации АСУ ТППС ЕНЭС. Общие технические требования», а оттуда - в дополнительный вычислительный модуль, связанный с контроллером присоединения.
В качестве материального объекта, над которым производятся действия способа, выбрана в данном примере реализации способа электрическая подстанция. В качестве примера материального объекта может быть любой промышленный объект, имеющий электрическую сеть электропитания оборудования.
Для реализации способа используют, по меньшей мере, два дополнительных вычислительных модуля 7 (фиг.1), которые встроены в контроллеры управления первичным оборудованием 1, в частности – в контроллеры присоединения первичного оборудования. При этом в дополнительном вычислительном модуле 7 устанавливают программные агенты, которые в совокупности представляют собой мультиагентную систему, в которой каждый агент связан с другими агентами так, что они имеют средства обмена между собой сообщениями. Указанные сообщения направлены на решение общей логической задачи определения возможности или невозможности управления первичным оборудованием в данный момент времени.
Определение возможности/невозможности управления электрической подстанцией устанавливают в зависимости от состояния первичного (силового) оборудования: положения выключателей, разъединителей, заземляющих ножей, измерений от трансформаторов тока и напряжения. Для других промышленных объектов, например, транспортирующих трубопроводов, определение возможности/невозможности управления объектами устанавливают в зависимости от давления транспортируемой среды, её расхода и положения задвижек.
На фиг.2 показаны команда 8, поступающая от локального оборудования 6 – с его устройства управления АСУТП на управление первичным оборудованием 1, запрос 9 от агента одного вычислительного модуля 7 другому агенту другого вычислительного модуля 7, ответ 10 на запрос 9, а также запрещающий сигнал 11 устройству, запросившему возможность управления объектом.
Устройство для реализации способа представлено на фиг.3 в укрупненном блочном виде. Оно содержит соединенные между собой электрическими связями основной вычислительный блок-модуль 12 контроллера присоединения локального оборудования 4, дополнительный вычислительный блок-модуль 13, в который условно входят дополнительные вычислительные модули 7 для запуска агента мультиагентной системы. Блок-модуль 13 функционально связан с цифровой внутренней шиной 14 передачи данных, которая функционально связана с модулем 15 подключения к шине процесса. Модуль 15 связан через устройство связи с управляемым объектом.
Способ реализуют следующим образом. С целью исключения действий персонала, которые могут привести к аварии на объекте, в частности, на электроподстанции, перед включением автоматизированной системы управления осуществляют мониторинг состояния первичного оборудования 1 (фиг.1). В процессе мониторинга снимают с управляемого первичного оборудования 1 показатели его состояния (положение коммутационного аппарата, измерения токов и напряжений пофазно). Показатели локального оборудования 1 снимают устройствами связи локального оборудования 2 с объектом (УСО). При этом посредством каждого УСО осуществляют сбор показателей состояния каждого локального оборудования 1. При этом для предотвращения неверных действий оперативного персонала предотвращение действий осуществляют путем удаленного управления первичным (силовым) оборудованием через автоматизированную систему управления (АСУТП).
В процессе реализации способа подают от локального оборудования 6 – с его устройства управления АСУТП – команду 8 на включение управления первичным оборудованием 1, при этом команду подают на дополнительный вычислительный модуль 7 (фиг.2). При запуске команды 8, агент дополнительного вычислительного модуля 7, получивший команду 8 управления первичным оборудованием 1, проверяет локальные показатели состояния оборудования 1 на соответствие этих показателей разрешающим правилам, при этом агент модуля 7 использует локальные данные, доступные и содержащиеся в контроллерах присоединения локального оборудования 4.
Если для полученной команды 8 могут агентом модуля 7 могут быть выявлены все правила, обеспечивающие безопасное управление первичным оборудованием 1 на основе локальных данных и может быть получен ответ, то управление объектом посредством автоматизированной системы разрешается и команда 8 выполняется. Если локальных показателей состояния оборудования для выявления соответствия всем правилам безопасного управления объектом у агента модуля 7 не хватает, то агент модуля 7 отправляет по локальной вычислительной сети верхнего уровня локального оборудования 5 запрос 9 другому агенту другого вычислительного модуля 7, расположенному в другой локальной системе управления оборудования, соединенной электрической связью с оборудованием первой локальной системы.
Посредством первого агента одного модуля 7 запрашивают результат выявления критерия, которого ему не хватает для выявления одного или нескольких правил принятия разрешающего или запрещающего решения. Второй агент второго модуля 7, получивший запрос, при имеющемся у него достаточном объеме информации, формирует ответ на запрос и отправляет его первому агенту первого модуля 7, либо передает запрос по локальной вычислительной сети следующим агентам модулей 7 последовательно, пока не будет получен ответ на запрос.
Агенты модулей 7 отправляют запросы до момента опроса всех агентов или до момента неполучения от них ответов на запросы за заданный настраиваемый промежуток времени и, в случае неполучения указанных ответов, управляющую команду 8 посредством первого агента первого модуля 7 блокируют.
После получения ответа на отправленные другим агентам запросы, ответы возвращаются по цепочке агенту, получившему команду управления. Далее, после того, как все ответы были получены агентом, получившим команду 8 управления, посредством агента выявляются правила разрешения управления, после чего управление либо разрешается, либо блокируется.
Показанное на фиг.3 устройство для реализации способа работает следующим образом. В процессе выполнения действий способа в их последовательности – основной вычислительный блок-модуль 12 контроллера 4 присоединения выполняет известные функции автоматизированного управления технологическим оборудованием, при этом дополнительный вычислительный блок-модуль 13 в указанной последовательности действий способа запускает в работу агенты мультиагентной системы (фиг.1), при этом агент каждого модуля работает по заданной программе.
В процессе работы устройства модуль 15 подключения к внутренней цифровой шине 14 процесса (фиг.3) принимает и обрабатывает значения параметров измерений технологических параметров оборудования (токи, напряжения, положения коммутационных аппаратов…).
Значения параметров из технологической сети нижнего уровня от локального оборудования 3 (фиг.1) передаются на внутреннюю цифровую шину 14 посредством модуля 15 передачи данных и от неё значения параметров передаются блок-модулям 12 и 13, при этом значения параметров передаются также между этими блок-модулями.
Анализ топологии схемы соединения технологического оборудования в момент запроса на осуществление операции над одним из элементов технологического оборудования позволил использовать специализированное программное обеспечение, посредством которого осуществляют автоматическую настройку алгоритмов управления и реализуют представленный в данном описании способ автоматического управления технологическим оборудованием на промышленных объектах. При этом изложенный выше способ позволяет отказаться от задания вручную алгоритмов блокировки, поскольку способ предопределяет устанавливать алгоритмы автоматически и автоматически их корректировать при изменении технологической схемы объекта управления или при изменении состава оборудования объекта. В результате данный способ позволяет существенно уменьшить трудоемкость, связанную с обеспечением безопасности технологического объекта, а также обеспечить возможность использования универсальных действий и средств, направленных на повышение безопасности работы различных технологических объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ восстановления измерений для целей автоматизированных систем управления | 2021 |
|
RU2773717C1 |
| Способ перераспределения функций между устройствами автоматики при возникновении неисправностей в автоматизированной системе | 2020 |
|
RU2740683C1 |
| КОМПЛЕКСНОЕ ИСПЫТАНИЕ АВТОМАТИЗИРОВАННЫХ СИСТЕМ ЭЛЕКТРОПОДСТАНЦИИ | 2008 |
|
RU2464585C2 |
| КОНТРОЛЛЕР УПРАВЛЕНИЯ И МОНИТОРИНГА | 2018 |
|
RU2699064C1 |
| Способ управления вычислительным модулем системы автоматики | 2021 |
|
RU2756430C1 |
| СИСТЕМА ЗАЩИТЫ ИНФОРМАЦИИ ОТ НЕСАНКЦИОНИРОВАННОГО ДОСТУПА К ИНФОРМАЦИИ, СОДЕРЖАЩЕЙ СВЕДЕНИЯ, СОСТАВЛЯЮЩИЕ ГОСУДАРСТВЕННУЮ ТАЙНУ | 2010 |
|
RU2443017C1 |
| Способ управления режимами электроэнергетической системы | 2020 |
|
RU2750260C1 |
| СИСТЕМА ЗАЩИТЫ ИНФОРМАЦИИ ОТ НЕСАНКЦИОНИРОВАННОГО ДОСТУПА К ИНФОРМАЦИИ, СОДЕРЖАЩЕЙ СВЕДЕНИЯ, СОСТАВЛЯЮЩИЕ ГОСУДАРСТВЕННУЮ ТАЙНУ | 2012 |
|
RU2504835C1 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОСНАБЖЕНИЯ ЖЕЛЕЗНЫХ ДОРОГ | 2015 |
|
RU2587128C1 |
| СИСТЕМА ЗАЩИТЫ ИНФОРМАЦИИ ОТ НЕСАНКЦИОНИРОВАННОГО ДОСТУПА К КОНФИДЕНЦИАЛЬНОЙ ИНФОРМАЦИИ И ИНФОРМАЦИИ, СОДЕРЖАЩЕЙ ПЕРСОНАЛЬНЫЕ ДАННЫЕ | 2010 |
|
RU2444057C1 |
Изобретение относится к электротехнике. Технический результат заключается в повышении безопасности управления промышленным объектом. Такой результат достигается тем, что осуществляют сбор данных о состоянии оборудования и его рабочих параметрах, контроль состояния и системы управления и до её включения вводят в неё агенты удаленного управления и дополнительный вычислительный модуль управления для запуска агентов удаленного управления оборудованием. Перед удаленным управлением осуществляют мониторинг первичного оборудования, включенного в систему управления через множество устройств связи с объектом. При запуске команды оперативного управления используют агент удаленного управления для проверки показателей локального оборудования на соответствие его параметров разрешающим правилам управления. Если команда выдана в соответствии с правилами оперативного управления и эти правила могут быть выявлены дополнительным вычислительном модулем и при этом может быть получен ответ, то управление первичным оборудованием или разрешается, или блокируется. Если локальных показателей состояния оборудования недостаточно, то посредством первого агента отправляют запрос второму агенту, расположенному в другой локальной системе управления, соединенной с оборудованием первой локальной системы. Первым агентом запрашивают результат получения критерия, недостающего для выявления правил принятия разрешающего или запрещающего решения. От второго агента, получившего запрос, получают ответ на запрос первого агента и или отправляют ему ответ, или передают запрос третьему агенту. Запросы отправляют до момента опроса всех агентов. В случае неполучения от агентов ответов на запросы команду первого агента блокируют, а при получении первым агентом ответа на все запросы первым агентом разрешают или запрещают управление объектом. 1 з.п. ф-лы, 3 ил.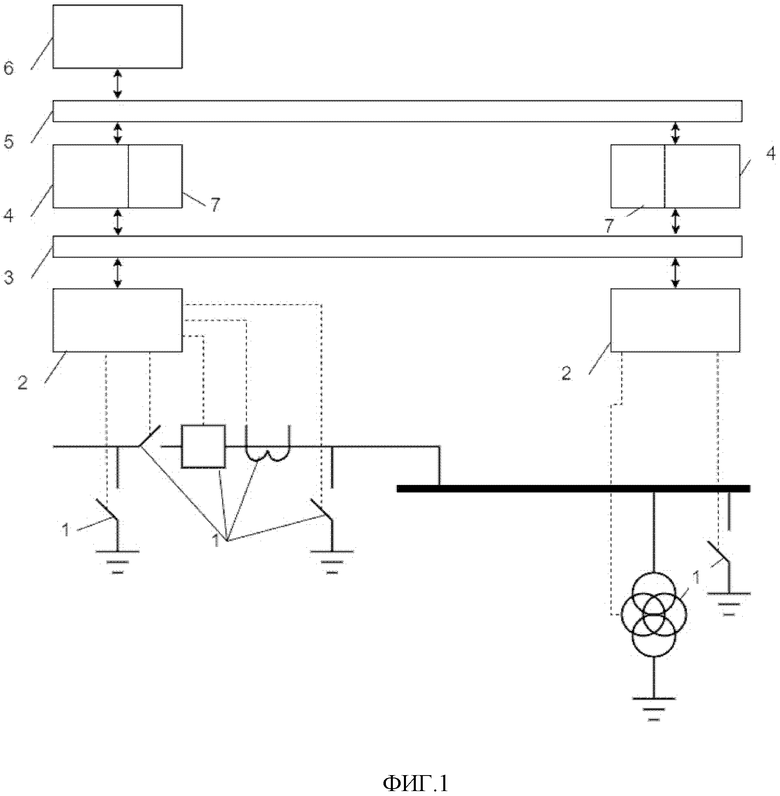
1. Способ предотвращения аварийных действий при оперативном управлении технологическим объектом, характеризующийся тем, что осуществляют посредством автоматизированной системы управления сбор данных о состоянии оборудования через устройства связи с объектом и через технологическую локальную вычислительную сеть нижнего уровня, передают данные о рабочих параметрах оборудования в контроллеры присоединения, осуществляют через контроллеры присоединения контроль за состоянием и управлением оборудования и осуществляют контроль за состоянием оборудования посредством локальной вычислительной сети верхнего уровня системы управления, причем до включения системы управления вводят в систему управления среднего уровня агенты удаленного управления оборудованием, представляющие собой программу ЭВМ, которая является частью дополнительного вычислительного модуля устройства управления промышленным объектом, и вводят в систему управления дополнительный вычислительный модуль управления для запуска агентов удаленного управления оборудованием, при этом перед осуществлением удаленного управления осуществляют мониторинг первичного силового оборудования объекта, включенного в систему управления через множество устройств связи с объектом, при этом при запуске команды оперативного управления оборудованием используют агент удаленного управления для проверки показателей локального оборудования на соответствие его параметров разрешающим правилам управления, и если команда оперативного управления выдана в соответствии с разрешающими правилами оперативного управления и эти правила могут быть выявлены дополнительным вычислительном модулем управления объектом на основе локальных данных и при этом может быть получен ответ, то управление первичным оборудованием посредством автоматизированной системы или разрешается, или блокируется, а если локальных показателей состояния оборудования для расчёта соответствия правилам разрешения или блокирования оперативного управления недостаточно, то посредством первого агента отправляют запрос второму агенту, расположенному в другой локальной системе управления оборудования, соединенной электрической связью с оборудованием первой локальной системы, причем посредством первого агента запрашивают результат получения критерия, недостающего для выявления одного или нескольких правил принятия разрешающего или запрещающего решения, затем посредством второго агента, получившего запрос, при имеющемся у него достаточном объеме информации получают ответ второго агента на запрос первого агента, и при этом второй агент отправляет ответ первому агенту либо передают запрос по локальной вычислительной сети следующему третьему агенту, причем посредством агентов отправляют запросы в указанной последовательности до момента опроса всех агентов, после чего в случае неполучения от агентов ответов на запросы в течение проводимого мониторинга управляющую команду посредством первого агента блокируют, а в случае получения первым агентом ответа на отправленный запрос и полученных ответов на запросы других агентов, посредством первого агента и дополнительного вычислительного модуля выявляют правила разрешения управления, разрешающие или запрещающие управление объектом.
2. Способ по п.1, отличающийся тем, что в процессе мониторинга каждый агент удаленного управления функционально связывают с контроллером присоединения локального оборудования объекта.
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СЛОЖНЫМ ТЕХНОЛОГИЧЕСКИМ ОБЪЕКТОМ | 2000 |
|
RU2178578C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2696903C1 |
| Централизованное интеллектуальное электронное устройство системы автоматизированной электрической подстанции | 2019 |
|
RU2720318C1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| US 5513095 A, 30.04.1996. | |||

