Область техники
Изобретение относится к ракетно-космической области, в частности жидкостным ракетным двигателям (ЖРД), и предназначено для использования при их экспериментальной доводке, эксплуатации и модернизации.
Уровень техники
Известен способ параметрической идентификации математической модели объекта по патенту РФ №2444043, МПК G05B 17/02, G06F 17/18 от 27.02.2012 г. Способ включает определение значений входных и выходных сигналов объекта и идентифицируемых параметров математической модели, представленной в виде системы уравнений. Входные сигналы рассчитывают по измеренным и функционально связанными с ними параметрам, а выходные - только измеряют. В данный момент времени t, полагая значения входных и выходных сигналов, а также состав идентифицируемых параметров модели известными, их текущие значения определяют следующим образом. Рассчитывают невязки как разности между левой и правой частями уравнений, определяют и минимизируют взвешенную сумму квадратов невязок, приравнивая ее частные производные по идентифицируемым параметрам нулю и, решив полученную систему уравнений относительно идентифицируемых параметров, находят их значения в момент времени t + Δt.
Постоянно обновляющиеся идентифицируемые параметры модели используют для построения прогнозирующей модели при управлении объектом.
Этот способ идентификации можно рассматривать как способ коррекции, в котором состав корректируемых параметров математической модели объекта контроля заранее регламентируется.
Известен также способ коррекции математической модели жидкостного реактивного двигателя (ЖРД) (патент РФ №2749497, МПК F02K 1/00, G06F 17/18, G05B 17/00 от 28.02.2020 г.), в котором с целью идентификации математической модели ЖРД проводят коррекцию уравнений математической модели по результатам его многорежимного стендового испытания путем введения в уравнения модели экспериментальных данных и мультипликативных коэффициентов коррекции. При этом количество непосредственной корректируемых уравнений ограничено и равно количеству используемых для идентификации измерений.
Этот способ наиболее близок к заявляемому способу, так как идентификация математической модели достигается путем коррекции системы уравнений, описывающей рабочие процессы в объекте контроля.
Однако рассмотренный прототип имеет следующий недостаток: состав корректируемых уравнений математической модели прототипа ограничен составом измеряемых параметров, регламентируемым штатной программой измерения. На практике состав измеряемых параметров значительно меньше количества уравнений, и, следовательно, количества корректируемых параметров математической модели.
Раскрытие изобретения
В предлагаемом изобретении отмеченный недостаток прототипа устранен за счет введения в каждое уравнение математической модели двигателя аддитивных корректирующих поправок с целью учесть во всех уравнениях математической модели особенности функционирования конкретного экземпляра двигателя при огневом многорежимном испытании.
Предлагаемый способ обеспечивает коррекцию математической модели ЖРД также и в тех случаях, когда используемый состав измеряемых параметров может варьироваться в зависимости от достоверности измерений одного или нескольких датчиков в процессе огневого испытания двигателя.
Такая математическая модель гибко реагирует на изменение состава измерений в случае их недостоверности вследствие потери информации от одного или нескольких датчиков.
Технический результат заключается в расширении средств достоверной расчетной имитации работы ЖРД в разнообразных условиях его эксплуатации и, в конечном итоге, в замене части натурных испытаний расчетными исследованиями при экспериментальной доводке, эксплуатации и модернизации ЖРД.
Осуществление изобретения
Способ реализуют следующими действиями.
1. Проводят огневое стендовое испытание по циклограмме, содержащей различные режимы работы ЖРД. На этих режимах измеряют K параметров двигателя, задействованные в его математической модели, представленной в виде системы уравнений, связывающей N переменных  параметров двигателя
параметров двигателя

(параметры, используемые для замыкания системы (1), например, параметры управления режимами работы двигателя, полагаются известными.
2. На каждом режиме испытания решают систему уравнений (1), в левую часть каждого ее уравнения подставляют измеренные значения и расчетные значения переменных и вычисляют невязки 

где  - измеренные значения,
- измеренные значения,  расчетных значений переменных.
расчетных значений переменных.
3. Ряд невязок (2)  (2), применяя, например, метод наименьших квадратов, аппроксимируют и определяют для каждого уравнения (1) корректирующую поправку
(2), применяя, например, метод наименьших квадратов, аппроксимируют и определяют для каждого уравнения (1) корректирующую поправку  как функцию параметров управления режимами работы двигателя, например, положений приводов α1 - регулятора расхода горючего и α2 - дросселя горючего:
как функцию параметров управления режимами работы двигателя, например, положений приводов α1 - регулятора расхода горючего и α2 - дросселя горючего:

где  - аппроксимирующая функция.
- аппроксимирующая функция.
Корректирующие поправки  подставляют в систему уравнений (1):
подставляют в систему уравнений (1):

и получают математическую модель двигателя, скорректированную по результатам его огневого испытания. Математическая модель вида (4) представляет собой систему уравнений (1), в правой части которой в каждом уравнении содержится корректирующая поправка.
Эту математическую модель применяют для управления двигателем на последующих огневых испытаниях, а также для замещения части огневых испытаний двигателя цифровым моделированием.
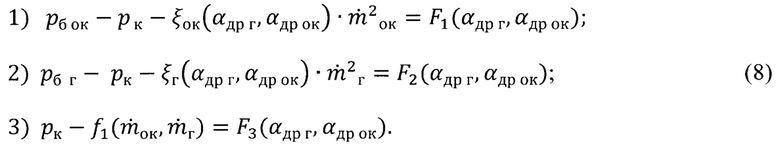
Для иллюстрации предлагаемого способа локализации неисправности при огневом испытании рассмотрим ЖРД с вытеснительной подачей топлива в камеру сгорания на стационарном режиме работы, математическая модель которого представлена системой уравнений:

где  - давления в баке окислителя и горючего;
- давления в баке окислителя и горючего;  - давление в камере сгорания;
- давление в камере сгорания;  - расходы окислителя и горючего;
- расходы окислителя и горючего;  - положение приводов дросселей окислителя и горючего;
- положение приводов дросселей окислителя и горючего;  - коэффициенты гидросопротивления тракта окислителя и горючего, как функции
- коэффициенты гидросопротивления тракта окислителя и горючего, как функции  Параметры
Параметры  полагаются известными (измеренными) внешними параметрами, не входящими в переменные двигателя и используются только для замыкания системы уравнений (5).
полагаются известными (измеренными) внешними параметрами, не входящими в переменные двигателя и используются только для замыкания системы уравнений (5).
Пусть параметр  измеряют на испытании. Решив систему уравнений (5), и определяют расчетные значения остальных параметров. Далее, подставив в каждое уравнение все измеренные переменные (верхний символ *) и расчетные (верхний символ 0) значения параметров, получают систему уравнений:
измеряют на испытании. Решив систему уравнений (5), и определяют расчетные значения остальных параметров. Далее, подставив в каждое уравнение все измеренные переменные (верхний символ *) и расчетные (верхний символ 0) значения параметров, получают систему уравнений:
Выполнив эту процедуру на всех М режимах испытания, получают ряды невязок для каждого уравнения:
Каждый ряд аппроксимируют, например, по методу наименьших квадратов функциями от  и получают поправки
и получают поправки  с помощью которых формируют скорректированную на данном испытании систему уравнений:
с помощью которых формируют скорректированную на данном испытании систему уравнений:
Промышленная применимость
Предлагаемый способ коррекции математической модели ЖРД проработан и прошел апробирование на предприятии АО «НПО Энергомаш имени академика В.П. Глушко» при экспериментальной доводке, эксплуатации и модернизации ЖРД.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции математической модели жидкостного ракетного двигателя | 2020 |
|
RU2749497C1 |
| Способ локализации неисправности жидкостного ракетного двигателя при огневом испытании | 2022 |
|
RU2820906C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ НАСОСОВ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2021 |
|
RU2791147C1 |
| Способ локализации неисправности жидкостного ракетного двигателя при огневом испытании | 2020 |
|
RU2750875C1 |
| Способ функционального диагностирования жидкостного ракетного двигателя при огневом испытании | 2020 |
|
RU2781738C2 |
| Способ регулирования параметров жидкостного ракетного двигателя | 2019 |
|
RU2756558C2 |
| Способ адаптивной настройки контролируемых параметров системы аварийной защиты жидкостного ракетного двигателя на первое огневое испытание | 2022 |
|
RU2800833C1 |
| Способ контроля характеристик агрегатов жидкостного ракетного двигателя при огневом испытании | 2020 |
|
RU2750874C1 |
| СПОСОБЫ НАСТРОЙКИ И РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ИЗДЕЛИЯ, В ЧАСТНОСТИ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2282046C2 |
| СПОСОБ НАСТРОЙКИ И РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2003 |
|
RU2278988C2 |
Изобретение относится к ракетно-космической области, в частности жидкостным ракетным двигателям (ЖРД), и предназначено для использования при их экспериментальной доводке, эксплуатации и модернизации. С целью идентификации математической модели двигателя проводят коррекцию уравнений его математической модели по результатам измерений параметров двигателя на огневом испытании путем введения в каждое уравнение аддитивных коэффициентов коррекции, что позволяет скорректировать математическую модель ЖРД при отсутствии заранее регламентируемого состава корректируемых уравнений математической модели или недостоверности измерений одного или нескольких параметров. Такая модель гибко реагирует на изменение состава измерений в случае потери одного или нескольких датчиков, проблем с получением или обработкой части информации и по степени адекватности применима для замещения части огневых испытаний цифровым. При реализации заявленного способа достигается расширение средств достоверной расчетной имитации работы ЖРД в разнообразных условиях его эксплуатации и, в конечном итоге, в замене части натурных испытаний расчетными исследованиями при экспериментальной доводке, эксплуатации и модернизации ЖРД.
Способ коррекции математической модели жидкостного ракетного двигателя, в котором для идентификации математической модели двигателя проводят коррекцию уравнений его математической модели по результатам измерений параметров двигателя на огневом испытании путем введения в уравнения модели корректирующих поправок, отличающийся тем, что математическую модель корректируют так, что на каждом режиме огневого испытания измеряют K параметров двигателя, задействованные в его математической модели, представленной в виде системы уравнений, связывающей N переменных x1, …, xN параметров двигателя как fi(x1, …, xN) = 0, i = 1, 2, …, N; K < N, на каждом режиме испытания решают систему уравнений, в левую часть каждого уравнения подставляют измеренные  и расчетные значения
и расчетные значения  переменных, вычисляют невязки
переменных, вычисляют невязки  на всех М режимах огневого испытания, и полученный на каждом режиме для каждого уравнения ряд невязок δi1, δi1, …, δiM аппроксимируют как функцию Δi параметров управления режимами работы двигателя, а математическую модель формируют в виде системы уравнений fi(x1, x2, …, xn) = Δi и применяют для управления двигателем на последующих огневых испытаниях, а также для замещения части огневых испытаний двигателя цифровым моделированием.
на всех М режимах огневого испытания, и полученный на каждом режиме для каждого уравнения ряд невязок δi1, δi1, …, δiM аппроксимируют как функцию Δi параметров управления режимами работы двигателя, а математическую модель формируют в виде системы уравнений fi(x1, x2, …, xn) = Δi и применяют для управления двигателем на последующих огневых испытаниях, а также для замещения части огневых испытаний двигателя цифровым моделированием.
| Способ коррекции математической модели жидкостного ракетного двигателя | 2020 |
|
RU2749497C1 |
| СПОСОБ ПАРАМЕТРИЧЕСКОЙ ИДЕНТИФИКАЦИИ МАТЕМАТИЧЕСКОЙ МОДЕЛИ СУДНА | 2010 |
|
RU2444043C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕАРИЗОВАННОГО ДИНАМИЧЕСКОГО ОБЪЕКТА | 2003 |
|
RU2256950C2 |
| US 6748349 B1, 08.06.2004 | |||
| CN 103412493 A, 17.11.2013. | |||

