ОБЛАСТЬ ТЕХНИКИ
Предметом данного изобретения являются устройство и способ восприятия положения, коррекции и изменения режима в системе рулевого управления несколькими мостами строительного транспортного средства. Конкретнее, предметом данного изобретения являются устройство и способ определения угла поворота, по меньшей мере, одного моста для управления изменением режима во многорежимной системе рулевого управления несколькими мостами в дополнение к автоматической коррекции неправильного расположения колес при рулевом управлении.
УРОВЕНЬ ТЕХНИКИ
Системы рулевого управления несколькими мостами обладают способностью поворачивать, по меньшей мере, две пары колес на транспортном средстве. Такие системы также известны как «системы рулевого управления с приводом на четыре колеса», но здесь будут именоваться «системами рулевого управления несколькими мостами» во избежание путаницы с режимом работы, предусматривающим рулевое управление с приводом на четыре колеса (описываемым ниже). В секторе строительства, такие транспортные средства, как экскаваторы-погрузчики (именуемые также механическими лопатами) и телескопические погрузчики, зачастую предусматривают применение рулевого управления несколькими мостами, чтобы увеличить универсальность транспортного средства. В типичных случаях, такие системы являются многорежимными, т.е., имеют несколько режимов работы.
Обращаясь к фиг. 1a, 1b и 1с, отмечаем, что здесь показано схематическое изображение трех режимов рулевого управления известного экскаватора-погрузчика, имеющего систему рулевого управления несколькими мостами. Общее направление движения при выровненных колесах обозначено символом D на фиг. 1а. Экскаватор-погрузчик 10 имеет пару передних колес 12а, 12b на переднем мосту и пару задних колес 14а, 14b на заднем мосту. Режимы работы являются следующими:
• режим рулевого управления с приводом на два колеса (фиг. 1а), в котором передние колеса 12a, b поворачиваются в ответ на входное воздействие на рулевое колесо;
• режим рулевого управления с приводом на четыре колеса (фиг. 1b), в котором передние колеса 12а, b и задние колеса 14а, b поворачиваются в ответ на входное воздействие на рулевое колесо; задние колеса поворачиваются противоположно передним колесам, чтобы обеспечить более крутой разворот (меньший диаметр поворота);
• режим одновременного поворота всех колес в одну сторону (фиг. 1c) в котором передние колеса 12а, b и задние колеса 14a, b поворачиваются в ответ на входное воздействие на рулевое колесо; задние колеса поворачиваются в таком же направлении, как передние колеса, так что транспортное средство «движется вбок» или движется в линейном направлении D', имеющем боковую составляющую.
В этом примере известного технического решения применяется рулевое управление с помощью гидравлического усилителя. Каждое колесо установлено на кулаке, который установлен на мосту с возможностью поворота относительно оси шкворня поворотного кулака. Для поворота каждой пары кулаков используется гидравлический домкрат двухстороннего действия, размещенный между колесами и позади моста в направлении движения. Чтобы повернуть колеса вправо, находящуюся под давлением рабочую жидкость подают на левую сторону домкрата, и наоборот.
Домкраты предусмотрены на каждом мосту. Передний и задний домкраты гидравлически сообщаются через гидравлический клапан. Этот гидравлический клапан определяет три режима рулевого управления. В режиме рулевого управления с приводом на два колеса клапан настроен на обеспечение замкнутого контура между двумя сторонами переднего домкрата. Задний домкрат заперт запирающим потоком к любой из двух сторон или от нее. В режиме рулевого управления с приводом на четыре колеса клапан соединяет передний домкрат и задний домкрат на противоположных сторонах, так что движение переднего домкрата в одном направлении приводит к движению заднего домкрата в противоположном направлении. В режиме одновременного поворота всех колес в одну сторону клапан соединяет передний домкрат и задний домкрат на одноименных сторонах, так что движение переднего домкрата в одном направлении приводит к движению заднего домкрата в таком же направлении.
Чтобы осуществить переход между этими режимами, водитель должен следовать некоторой определенной процедуре. При переходе от рулевого управления с приводом на два колеса к рулевому управлению с приводом на четыре колеса, либо к одновременному повороту всех колес в одну сторону, водитель активирует орган управления в кабине. Чтобы этот переход произошел, колеса должны располагаться прямо и быть выровненными друг с другом (согласно фиг. 1а). Таким образом, при получении требования перейти в другой режим, система управления поворотом подождет, пока водитель повернет передние колеса так, чтобы они оказались выровнены с задними.
Угол поворота или положение при повороте обнаруживается магнитным датчиком положения снаружи передних и задних домкратов. Эти датчики установлены на домкрате в линейном центре и могут обнаруживать присутствие поршня. Таким образом, как только обнаруживается поршень, предполагается, что колеса оказываются выровненными друг с другом, а клапан переводится в желаемый режим.
Аналогичным образом, при переключении либо с рулевого управления с приводом на четыре колеса, либо с одновременного поворота всех колес в одну сторону на рулевое управление с приводом на два колеса, требуется выравнивание задних колес. Это необходимо потому, что транспортное средство может использоваться для движения с высокими скоростями, и поэтому выравнивание задних колес важно во избежание необязательного износа шин. Положение задних колес тоже обнаруживает датчик положения снаружи заднего домкрата. Этот датчик установлен на домкрат в линейном центре и может обнаруживать присутствие поршня. Таким образом, как только обнаруживается поршень, предполагается, что колеса оказываются выровненными друг с другом, а клапан переводится в режиме рулевого управления с приводом на два колеса, запирая задние колеса в нужном положении.
Если бы задние колеса оказались установленными неправильно (например, за счет переезда через рытвину на скорости), датчик на заднем домкрате обнаружил бы это движение, и в кабине был бы выработан предупредительный сигнал. Тогда потребитель был бы вынужден предпринять процедуру коррекции на низкой скорости.
С известными системами рулевого управления несколькими мостами связаны особые проблемы.
Во-первых, обнаружение поршней внутри цилиндров домкрата является неточным. Физического соединения между поршнем и датчиком нет, и поэтому степень точности оказывается низкой (5-10 мм), что может привести к нескольким градусам неточности в отношении угла поворота. Датчик обычно крепится к домкрату стяжными хомутами, и поэтому его можно выдавить из положения, в котором он находится.
Во-вторых, время, затрачиваемое датчиком на обнаружение поршня, сообщается как сигнал контроллеру, а контроллер может слишком медлить с ответом, если поворот транспортного средства происходит быстро. Поэтому система может изменять режимы после того, как соответствующий набор колес «проскочит» предполагаемое положение, а это означает, что выравнивание не достигнуто. Отметим также, что когда поворот происходит быстро, система имеет дело с большим моментом количества движения, что тоже может вызывать проскакивание.
В третьих, если задние колеса выведены из выравнивания, например, из-за рытвины, водитель получает предупредительный сигнал, но ему приходится предпринимать корректирующее действие, вынуждающее съезжать с дороги и проходить процесс выравнивания при рулевом управлении. Это неудобно.
В четвертых, датчики, используемые в известных технических решениях, являются двоичными (т.е., поршень либо присутствует, либо отсутствует). Они могут обнаружить не то, насколько отдален поршень, а лишь есть он или нет в воспринимаемом диапазоне. Поэтому о степени рассогласования не сообщается.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель данного изобретения заключается в том, чтобы преодолеть или, по меньшей мере, нивелировать эти проблемы.
В соответствии с первым аспектом изобретения, предложена система рулевого управления несколькими мостами строительного транспортного средства, содержащая:
первый мост;
первый поворотный кулак, прикрепленный к первому мосту с возможностью поворота относительно оси шкворня первого поворотного кулака;
первый исполнительный механизм рулевого управления, конфигурация которого обеспечивает поворот первого поворотного кулака относительно оси шкворня первого поворотного кулака;
первый датчик угловых перемещений, выполненный с возможностью измерения первого поворота между первым мостом и первым поворотным кулаком относительно оси шкворня первого поворотного кулака;
контроллер, конфигурация которого обеспечивает прием данных из первого датчика угловых перемещений и управление первым исполнительным механизмом рулевого управления в ответ на первый поворот.
Применение датчика угловых перемещений допускает и непрерывный оперативный контроль угла поворота, и связывание направления с движущимися частями. Следовательно, это неизбежно точнее, чем в случае известного датчика линейных перемещений.
Транспортное средство предпочтительно содержит:
второй мост, смещенный от первого в направлении движения транспортного средства;
при этом транспортное средство имеет первый режим рулевого управления, в котором рулевое управление транспортным средством осуществляется относительно второго моста и не осуществляется относительно первого моста; и
при этом конфигурация контроллера обеспечивает:
определение, когда первый поворот превышает некоторый заранее определенный диапазон;
управление первым исполнительным механизмом рулевого управления с целью регулирования первого поворота до введения его в пределы заранее определенного диапазона.
Эта особенность «автоматической коррекции» полезна в случае, если задние колеса (первые колеса) оказываются неправильно расположенными из-за ухода или ударного воздействия.
Предпочтительно предусмотрены:
второй поворотный кулак, прикрепленный ко второму мосту для поворота относительно оси шкворня второго поворотного кулака; и
второй исполнительный механизм рулевого управления, конфигурация которого обеспечивает поворот второго поворотного кулака относительно оси шкворня второго поворотного кулака;
при этом:
первый и второй исполнительные механизмы представляют собой гидравлические домкраты двухстороннего действия, каждый из которых имеет первую и вторую стороны;
второй исполнительный механизм имеет источник жидкости для гидравлической системы, конфигурация которого обеспечивает подачу находящейся под давлением жидкости для гидравлической системы на одну сторону гидравлического домкрата двухстороннего действия с целью поворота второго поворотного кулака;
транспортное средство имеет второй режим рулевого управления, в котором первая сторона первого исполнительного механизма гидравлически сообщается с первой стороной второго исполнительного механизма и в котором вторая сторона первого исполнительного механизма гидравлически сообщается со второй стороной второго исполнительного механизма; и
транспортное средство имеет третий режим рулевого управления, в котором первая сторона первого исполнительного механизма гидравлически сообщается со второй стороной второго исполнительного механизма и в котором вторая сторона первого исполнительного механизма гидравлически сообщается с первой стороной второго исполнительного механизма.
Это с выгодой обеспечивает систему рулевого управления, стойкую к внешним воздействиям.
Второй режим рулевого управления предпочтительно является режимом одновременного поворота всех колес в одну сторону, в котором первый и второй поворотные кулаки поворачиваются в одном и том же направлении, а третий режим рулевого управления является режимом рулевого управления с приводом на четыре колеса, в котором первый и второй поворотные кулаки поворачиваются в противоположных направлениях.
Это придает транспортному средству универсальность.
Предпочтительно предусмотрен клапан, имеющий некоторое положение для каждого из первого, второго и третьего режимов. Клапан предпочтительно переведен в первый режим и содержит, по меньшей мере, один контроллер исполнительного механизма за счет конфигурации упомянутого ранее контроллера, вынуждающей перевод клапана во второй и/или третий режим. В более предпочтительном варианте, клапан находится в центральном положении в первом режиме и содержит два исполнительных механизма, конфигурация которых обеспечивает вынуждаемый перевод клапана в положение либо для второго, либо для третьего режима, соответственно. Это допускает простое управление путем простого задействования одного из двух исполнительных механизмов или электромагнитных клапанов контроллером.
Предпочтительно предусмотрен второй датчик угловых перемещений, выполненный с возможностью измерения второго поворота между вторым мостом и вторым поворотным кулаком относительно оси шкворня второго поворотного кулака, при этом конфигурация контроллера обеспечивает прием данных из второго датчика угловых перемещений. Это позволяет определять оба угла поворота.
Конфигурация контроллера предпочтительно обеспечивает:
прием входного воздействия водителя, которое связано с запрашиваемым изменением режима рулевого управления транспортным средством;
определение, когда первый поворот удовлетворяет заранее определенному критерию, указывающему, что достигнут центр; и
изменение режима рулевого управления транспортным средством, когда первый режим рулевого управления удовлетворил заранее определенному критерию.
Иными словами, во избежание неправильного выравнивания, система может подождать, пока колеса выровняются, прежде, чем изменять режимы.
Режим рулевого управления транспортным средством можно изменить с рулевого управления с приводом на четыре колеса или одновременного поворота всех колес в одну сторону на рулевое управление с приводом на два колеса, и в этом случае рулевое колесо поворачивают, пока не выровняется задний мост.
В предпочтительном варианте, когда режим рулевого управления транспортным средством изменяют на рулевое управление с приводом на четыре колеса или одновременный поворот всех колес в одну сторону, конфигурация контроллера обеспечивает:
определение, когда второй поворот удовлетворяет заранее определенному критерию, указывающему, что достигнут центр; и
изменение режима рулевого управления транспортным средством, когда второй режим рулевого управления удовлетворил заранее определенному критерию.
Это с выгодой приводит к заданию обоснованного выровненного положения для всех четырех колес.
Конфигурация контроллера предпочтительно обеспечивает:
определение, когда первый поворот превышает заранее определенный диапазон;
инициирование последовательности автоматической коррекции, при которой:
первый исполнительный механизм рулевого управления используют для регулирования первого поворота до введения его в пределы заранее определенного диапазона.
В более предпочтительном варианте, контроллер во время последовательности автоматической коррекции:
определяет направление осуществляемой при рулевом управлении коррекции первого поворота с помощью первого датчика;
определяет направление второго поворота с помощью второго датчика в процессе рулевого управления транспортным средством; и
выбирает второй или третий режим рулевого управления на основе направления осуществляемой при рулевом управлении коррекции первого поворота и направления второго поворота с целью регулирования первого поворота до введения его в пределы заранее определенного диапазона.
Это обеспечивает очень простое и стойкое к внешним воздействиям регулирование первого поворота с помощью находящейся на рабочем месте гидравлики рулевого управления с приводом на четыре колеса.
В предпочтительном варианте предложен исполнительный механизм, управляемый контроллером, для выбора второго или третьего режима рулевого управления, при этом исполнительный механизм в импульсном режиме обеспечивает регулирование посредством положительных приращений первого поворота до введения его в пределы заранее определенного диапазона. Это позволяет избежать проскока, обуславливаемого, например, инерцией. Под определением «импульсный режим» мы имеем в виду осуществление работы на протяжении увеличиваемых положительными приращениями заранее определенных периодов времени.
Конфигурация контроллера предпочтительно обеспечивает определение угловой скорости первого поворота из первого датчика угловых перемещений и управление первым исполнительным механизмом рулевого управления на основе этой угловой скорости поворота.
Конфигурация контроллера предпочтительно обеспечивает:
запоминание желаемого первого поворота;
оперативный контроль первого поворота;
оперативный контроль угловой скорости первого поворота;
отдание первому исполнительному механизму команды останова прежде, чем первый поворот достигает желаемого поворота, на основе угловой скорости первого поворота.
Конфигурация контроллера предпочтительно обеспечивает:
отдание первому исполнительному механизму команды остановить дальнейший поворот с момента достижения желаемого первого поворота, когда угловая скорость первого поворота увеличивается.
Эта система с выгодой позволяет учесть скорость рулевого управления и таким образом заблаговременно скорректировать проскок из-за либо (i) собственной задержки системы, либо (ii) механических эффектов, таких как инерция.
В соответствии со вторым аспектом изобретения предложен способ управления системой рулевого управления несколькими мостами строительного транспортного средства, включающий в себя этапы, на которых:
обеспечивают первый мост, первый поворотный кулак, прикрепленный к первому мосту для поворота относительно оси шкворня первого поворотного кулака, первый исполнительный механизм рулевого управления, конфигурация которого обеспечивает поворот первого поворотного кулака относительно оси шкворня первого поворотного кулака, и первый датчик угловых перемещений, выполненный с возможностью измерения поворота между первым мостом и первым поворотным кулаком; и
прием данных из первого датчика угловых перемещений и управление первым исполнительным механизмом рулевого управления в ответ на измеряемый поворот.
Способ предпочтительно включает в себя этапы, на которых:
обеспечивают второй мост, смещенный от первого в направлении движения транспортного средства;
вводят транспортное средство в первый режим рулевого управления, в котором рулевое управление транспортным средством осуществляется относительно второго моста и не осуществляется относительно первого моста;
определяют, когда первый поворот превышает заранее определенный диапазон; и
управляют первым исполнительным механизмом рулевого управления с целью регулирования первого поворота до введения его в пределы заранее определенного диапазона.
Способ предпочтительно включает в себя этапы, на которых:
обеспечивают второй поворотный кулак, прикрепленный ко второму мосту для поворота относительно оси шкворня второго поворотного кулака, и второй исполнительный механизм рулевого управления, конфигурация которого обеспечивает поворот второго поворотного кулака относительно оси шкворня второго поворотного кулака;
при этом первый и второй исполнительные механизмы представляют собой гидравлические домкраты двухстороннего действия, каждый из которых имеет первую и вторую стороны, причем второй исполнительный механизм имеет источник жидкости для гидравлической системы, конфигурация которого обеспечивает подачу находящейся под давлением жидкости для гидравлической системы на одну сторону гидравлического домкрата двухстороннего действия с целью поворота второго поворотного кулака;
вводят транспортное средство во второй режим рулевого управления, в котором первая сторона первого исполнительного механизма гидравлически сообщается с первой стороной второго исполнительного механизма и в котором вторая сторона первого исполнительного механизма гидравлически сообщается со второй стороной второго исполнительного механизма.
Способ предпочтительно включает в себя этапы, на которых:
вводят транспортное средство в третий режим рулевого управления, в котором первая сторона первого исполнительного механизма гидравлически сообщается со второй стороной второго исполнительного механизма и в котором вторая сторона первого исполнительного механизма гидравлически сообщается с первой стороной второго исполнительного механизма.
В предпочтительном варианте:
второй режим рулевого управления является режимом одновременного поворота всех колес в одну сторону, в котором первый и второй поворотные кулаки поворачиваются в одном и том же направлении, а
третий режим рулевого управления является режимом рулевого управления с приводом на четыре колеса, в котором первый и второй поворотные кулаки поворачиваются в противоположных направлениях.
Способ предпочтительно включает в себя этап, на котором обеспечивают клапан, имеющий некоторое положение для каждого из первого, второго и третьего режимов.
Способ предпочтительно включает в себя этапы, на которых:
осуществляют упругий перевод клапана в первый режим;
обеспечивают, по меньшей мере, один исполнительный механизм; и
используют исполнительный механизм для принудительного перевода клапана во второй и/или третий режим.
Способ предпочтительно включает в себя этапы, на которых:
обеспечивают первый исполнительный механизм клапана;
обеспечивают второй исполнительный механизм клапана;
используют первый исполнительный механизм клапана для введения транспортного средства во второй режим рулевого управления; и
используют второй исполнительный механизм клапана для введения транспортного средства в третий режим рулевого управления.
Способ предпочтительно включает в себя этапы, на которых:
обеспечивают второй датчик угловых перемещений;
измеряют второй поворот между вторым мостом и вторым поворотным кулаком с помощью второго датчика угловых перемещений.
Способ предпочтительно включает в себя этапы, на которых:
принимают входное воздействие водителя, связанное с запрашиваемым изменением режима рулевого управления транспортным средством;
определяют, когда первый поворот удовлетворяет заранее определенному критерию, указывающему, что достигнут центр; и
изменяют режим рулевого управления транспортным средством, когда первый режим рулевого управления удовлетворил заранее определенному критерию.
Способ предпочтительно включает в себя этапы, на которых:
изменяют режим рулевого управления транспортным средством с рулевого управления с приводом на четыре колеса или одновременного поворота всех колес в одну сторону на рулевое управление с приводом на два колеса.
Способ предпочтительно включает в себя этапы, на которых:
изменяют режим рулевого управления транспортным средством на рулевое управления с приводом на четыре колеса или одновременный поворот всех колес в одну сторону;
определяют, когда второй поворот удовлетворяет заранее определенному критерию, указывающему, что достигнут центр; и
изменяют режим рулевого управления транспортным средством, когда второй режим рулевого управления удовлетворил заранее определенному критерию.
Способ предпочтительно включает в себя этапы, на которых:
определяют, когда первый поворот превышает заранее определенный диапазон;
регулируют первый поворот до введения его в пределы заранее определенного диапазона с помощью первого исполнительного механизма рулевого управления.
Способ предпочтительно включает в себя этапы, на которых:
определяют направление осуществляемой при рулевом управлении коррекции первого поворота с помощью первого датчика;
осуществляют рулевое управление транспортным средством;
определяют направление второго поворота с помощью второго датчика в процессе рулевого управления транспортным средством; и
выбирают второй или третий режим рулевого управления на основе направления осуществляемой при рулевом управлении коррекции первого поворота и направления второго поворота для регулирования первого поворота до введения его в пределы заранее определенного диапазона.
Способ предпочтительно включает в себя этапы, на которых:
обеспечивают исполнительный механизм для выбора второго или третьего режима рулевого управления;
эксплуатируют исполнительный механизм в импульсном режиме для осуществляемого положительными приращениями регулирования первого поворота до введения его в пределы заранее определенного диапазона.
Способ предпочтительно включает в себя этапы, на которых:
определяют угловую скорость первого поворота из первого датчика угловых перемещений; и
управляют первым исполнительным механизмом рулевого управления на основе этой угловой скорости поворота.
Способ предпочтительно включает в себя этапы, на которых:
запоминают желаемый первый поворот;
оперативно контролируют первый поворот;
оперативно контролируют угловую скорость первого поворота;
останавливают первый исполнительный механизм до того, как первый поворот достигает желаемого поворота, на основе угловой скорости первого поворота.
Способ предпочтительно включает в себя этап, на котором:
останавливают первый исполнительный механизм, предотвращая дальнейший поворот от желаемого первого поворота, когда угловая скорость первого поворота увеличивается.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
на фиг. 1a, 1b и 1c представлены схематические виды известных режимов рулевого управления;
на фиг. 2 представлено схематическое изображение системы рулевого управления в соответствии с данным изобретением;
фиг. 3a представлен вид сзади компоновочного узла системы рулевого управления согласно фиг. 2;
на фиг. 3b представлен вид в плане компоновочного узла согласно фиг. 3;
на фиг. 4 представлен вид некоторых находящихся в кабине органов управления системы рулевого управления согласно фиг. 2;
на фиг. 5 представлен вид некоторых находящихся в кабине индикаторов системы рулевого управления согласно фиг. 2;
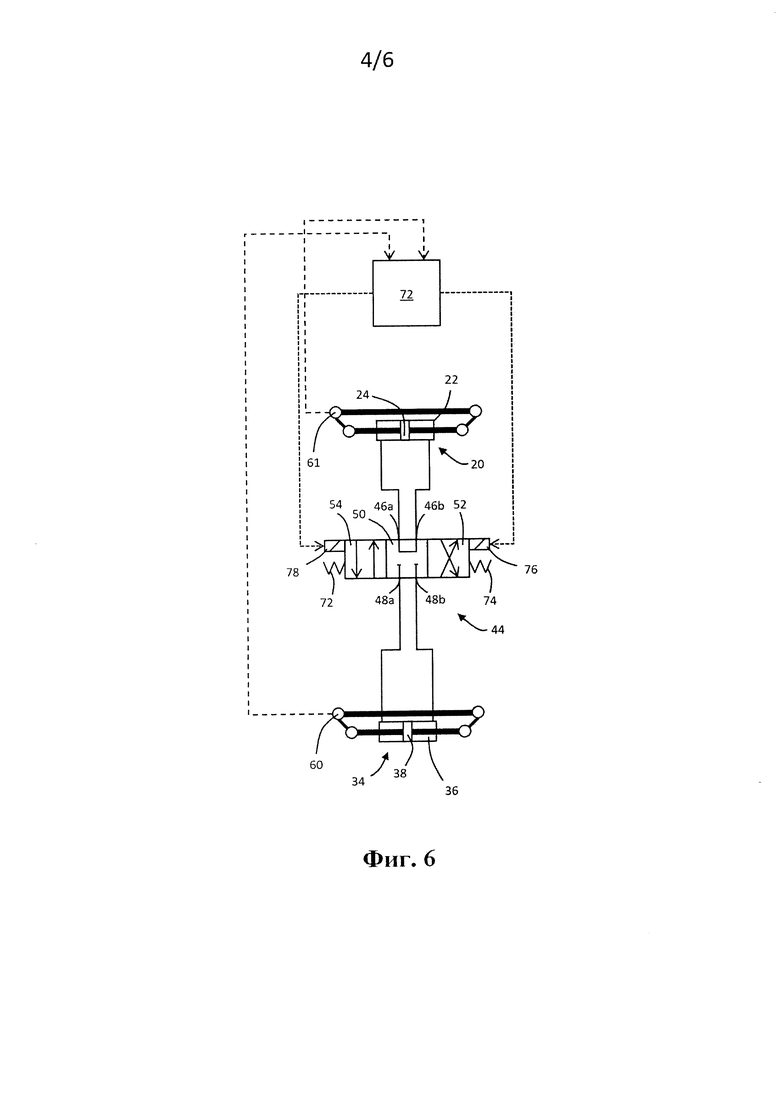
на фиг. 6 представлено дополнительно дополнительное схематическое изображение системы рулевого управления согласно фиг. 2;
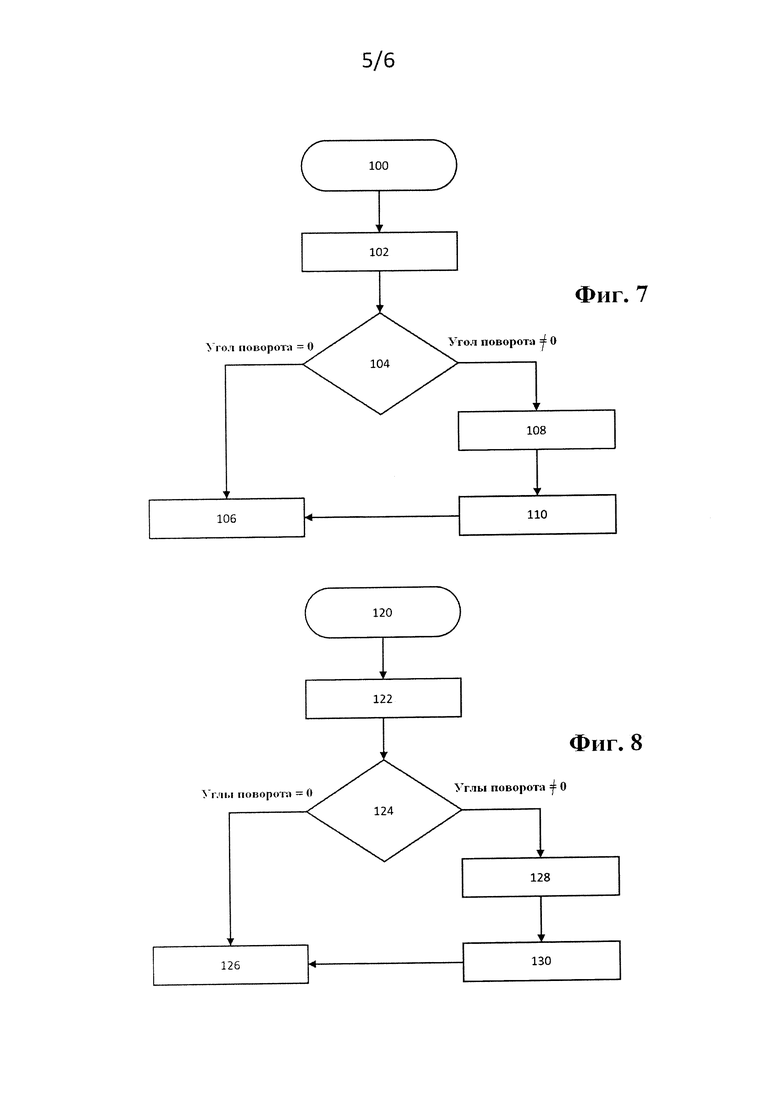
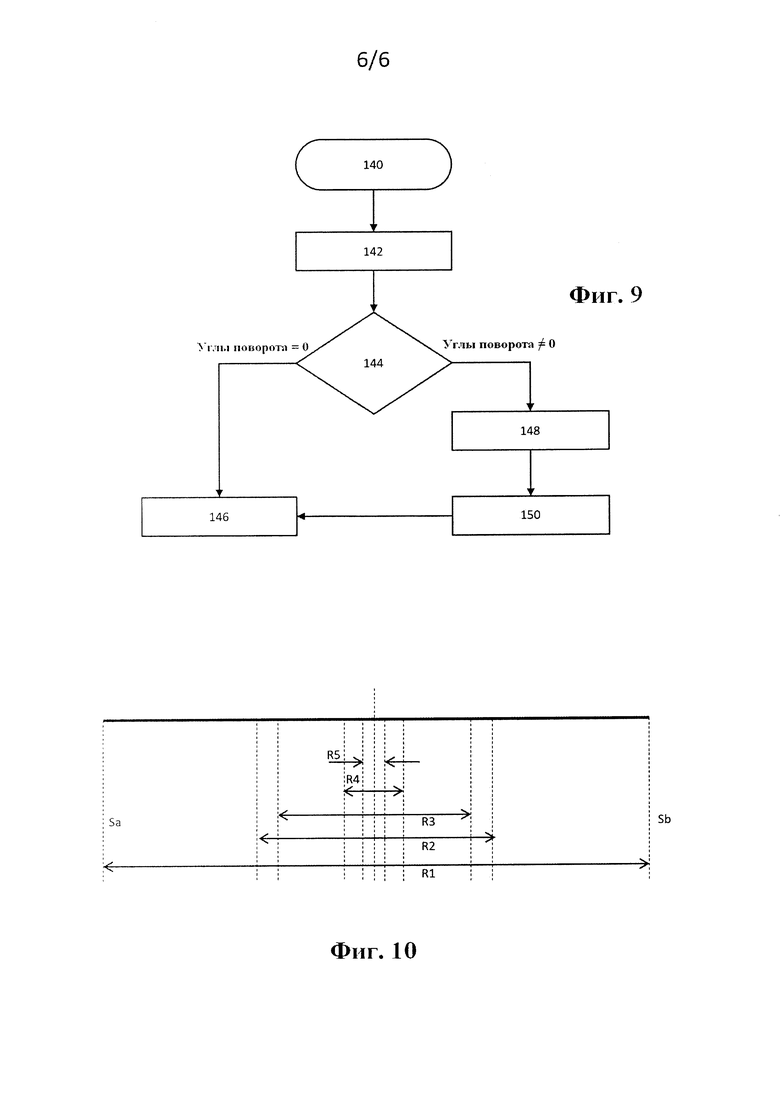
на фиг. 7-9 представлены блок-схемы последовательностей операций способов эксплуатации системы рулевого управления согласно фиг. 2; и
на фиг. 10 представлена диаграмма различных диапазонов, используемых контроллером системы рулевого управления согласно фиг. 2.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Теперь, со ссылками на чертежи, будет приведено описание устройства и способа в соответствии с изобретением, при этом:
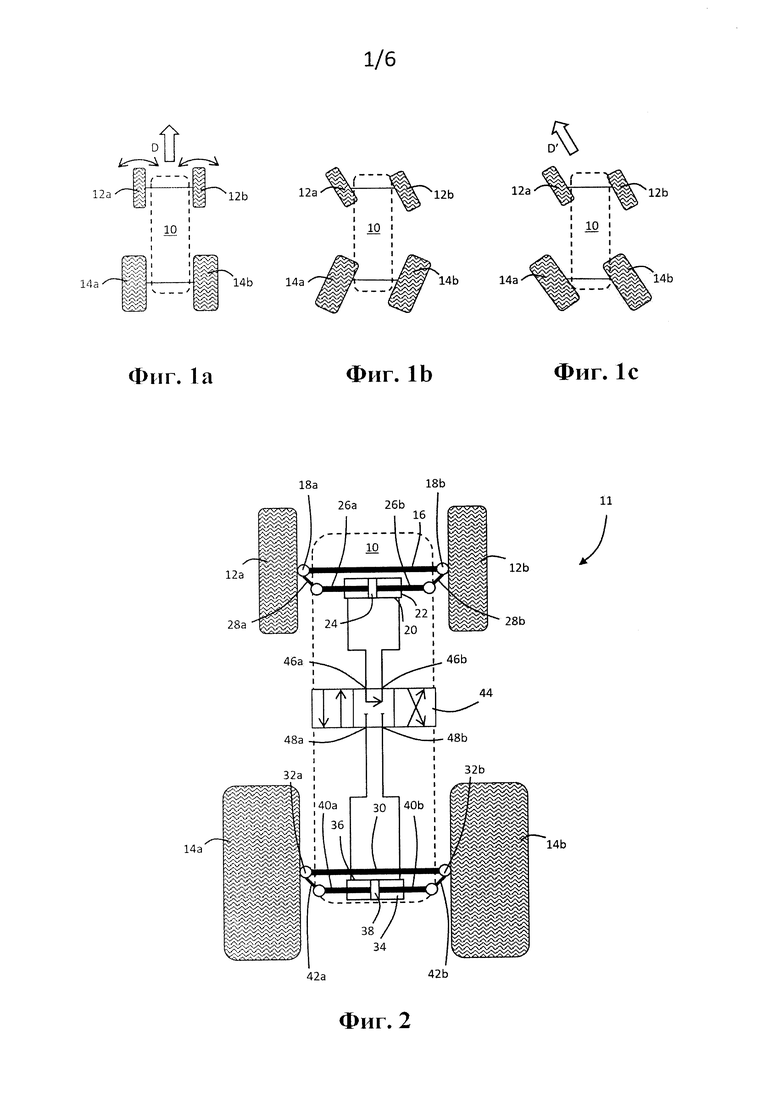
Обращаясь к фиг. 2, отмечаем, что здесь показана система 11 гидрообъемного рулевого управления с гидравлическим приводом на четыре колеса в соответствии с изобретением.
Транспортное средство 10 имеет пару передних колес 12а, 12b и пару задних колес 14а, 14b.
Передние колеса 12а, 12b установлены на поддерживающий передний мост 16. Каждое переднее колесо 12а, 12b установлено на кулаке (не виден на фиг. 2), который, в свою очередь, установлен посредством соответственного шкворня 18а, 18b с возможностью поворота на передний мост 16. Предусмотрен двухсторонний гидравлический домкрат 20, имеющий цилиндр 22 и скользящий в нем поршень 24. Поршень соединен на обеих сторонах с парой валов 26а, 26b рулевого управления, которые установлены своими соответственными свободными концами с возможностью вращения на пару поперечных рулевых тяг 28а, 26b. Поперечные рулевые тяги 28а, 28b соединены с кулаками, осуществляя привод кулаков, а значит - и колес, при повороте относительно шкворней 18а, 18b.
Задние колеса 14а, 14b установлены на поддерживающий задний мост 30, Каждое заднее колесо 14а, 14b установлено на кулаке (не виден на фиг. 2), который, в свою очередь, установлен посредством соответственного шкворня 32а, 32b с возможностью поворота на задний мост 30, Предусмотрен двухсторонний гидравлический домкрат 34, имеющий цилиндр 36 и скользящий в нем поршень 38. Поршень соединен на обеих сторонах с парой валов 40а, 40b рулевого управления, которые установлены своими соответственными свободными концами с возможностью вращения на пару поперечных рулевых тяг 42а, 42b. Поперечные рулевые тяги 42а, 42b соединены с кулаками, осуществляя привод кулаков, а значит - и колес, при повороте относительно шкворней 32а, 32b.
Система 11 рулевого управления содержит четырехпудовой трехпозиционный гидравлический клапан 44, связывающий передний домкрат 20 и задний домкрат 34. Клапан имеет первый и второй каналы 46а, 46b, соединенные с передним цилиндром 22 на обеих сторонах поршня 24. Клапан имеет третий и четвертый каналы 48а, 48b, соединенные с задним цилиндром 36 на обеих сторонах поршня 38.
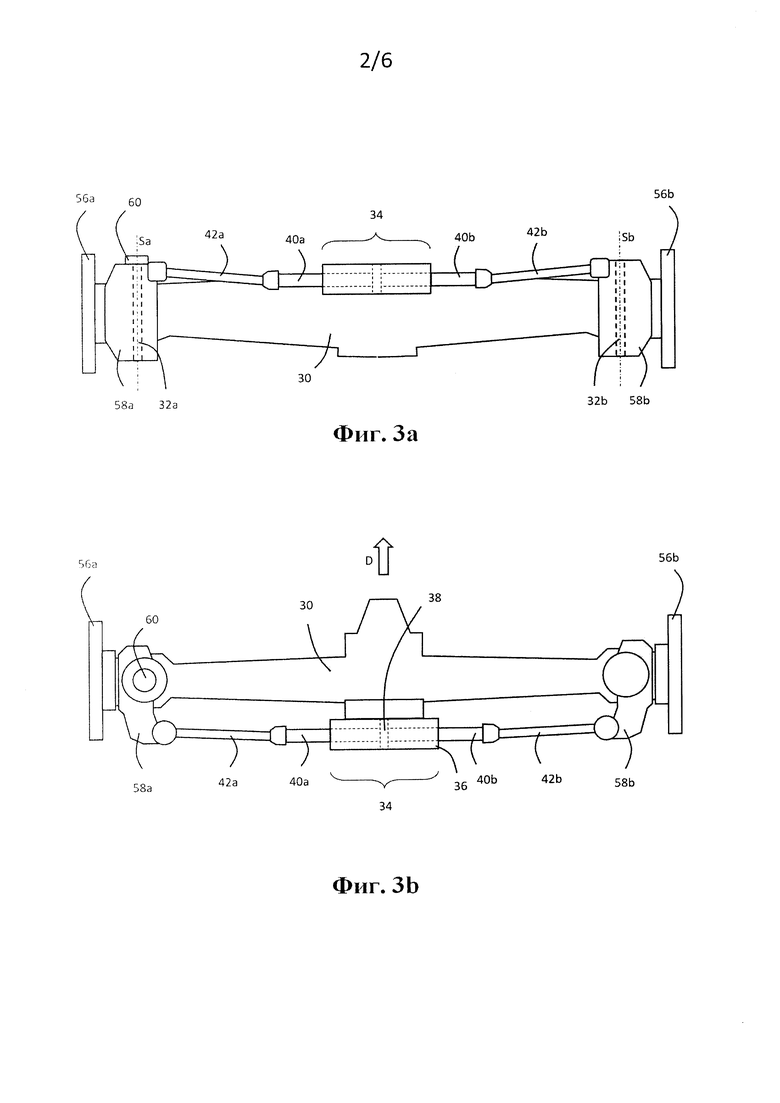
Обращаясь к фиг. 3a и 3b, отмечаем, что здесь показан более подробный вид заднего моста транспортного средства 10. На фиг. 3a представлен вид сзади транспортного средства в направлении D движения, при этом колеса выровнены и расположены прямо (т.е., к переднему мосту), а на фиг. 3b представлен вид в плане. Задние колеса 14а, 14b не показаны, а вместо этого показаны узлы 56а, 56b ступиц колес, к которым крепятся колеса 14а, 14b. Каждый узел 56а, 56b ступицы крепится к соответственному кулаку 58а, 58b, конфигурация которого обеспечивает поворот относительно соответственного шкворня 32а, 32b вокруг соответственных осей Sa и Sb поворота.
На левый кулак 58а установлен датчик 60 угловых перемещений. Этот датчик содержит корпус и вал (не виден), а его конфигурация обеспечивает генерирование электрического сигнала, характеризующего относительный поворот датчика. Датчик 60 имеет собственное разрешение r вольт постоянного тока на градус в диапазоне, составляющем R градусов полного диапазона. Следовательно, количество дискретных точек измерения составляет N=R/r. Корпус крепится к кулаку 58а, тогда как вал соединен со шкворнем 32а. Поэтому конфигурация датчика 60 угловых перемещений обеспечивает измерение относительного поворота между кулаком 58а и мостом 30, Другими словами, конфигурация датчика угла поворота обеспечивает измерение поворота узла 56а ступицы колеса (а значит - и колеса 14а) вокруг оси Sa шкворня его поворотного кулака.
Следует отметить, что в других вариантах осуществления возможно крепление корпуса и вала датчика к другим компонентам. Важно то, что (i) между компонентами датчика и соответственными частями системы 11 рулевого управления есть физическое соединение и что (ii) угол поворота характеризуется относительным поворотом этих частей.
Также следует отметить, что поскольку движения поворота кулаков 58а, 58b (а значит - и колес 14а, 14b) ограничивают друг друга посредством домкрата 34, требуется лишь один датчик.
Датчик в этом варианте осуществления выдает разность потенциалов между 0 и +5 вольт постоянного тока. Датчик вырабатывает переменный и непрерывный сигнал на основе положения вала. Датчик калиброван так, что при экстремальных значениях возможного угла поворота (известных как воспринимаемый диапазон R1) имеем: при Sa (например, поворот влево до отказа) сообщаемая разность потенциалов составляет 0,5 В, а при другом экстремальном значении угла поворота - Sb (например, поворот вправо до отказа) - сообщаемая разность потенциалов составляет 4,5 В. Если разность потенциалов падает ниже 0,5 В или превышает 4,5 В, возможно генерирование сигнала ошибки с целью указания проблемы с системой.
Чтобы откалибровать датчик угла поворота, его устанавливают в центральное положение (2,5 В). Домкрат 34 устанавливают в центральное положение, так что углы поворота вокруг Sa и Sb оказываются равными (0 градусов). Потом датчик закрепляют в этом положение таким образом, что рулевое управление в обоих направлениях создает сигнал выше или ниже 2,5 В.
На переднем мосту таким же образом тоже расположен датчик 61 угла поворота.
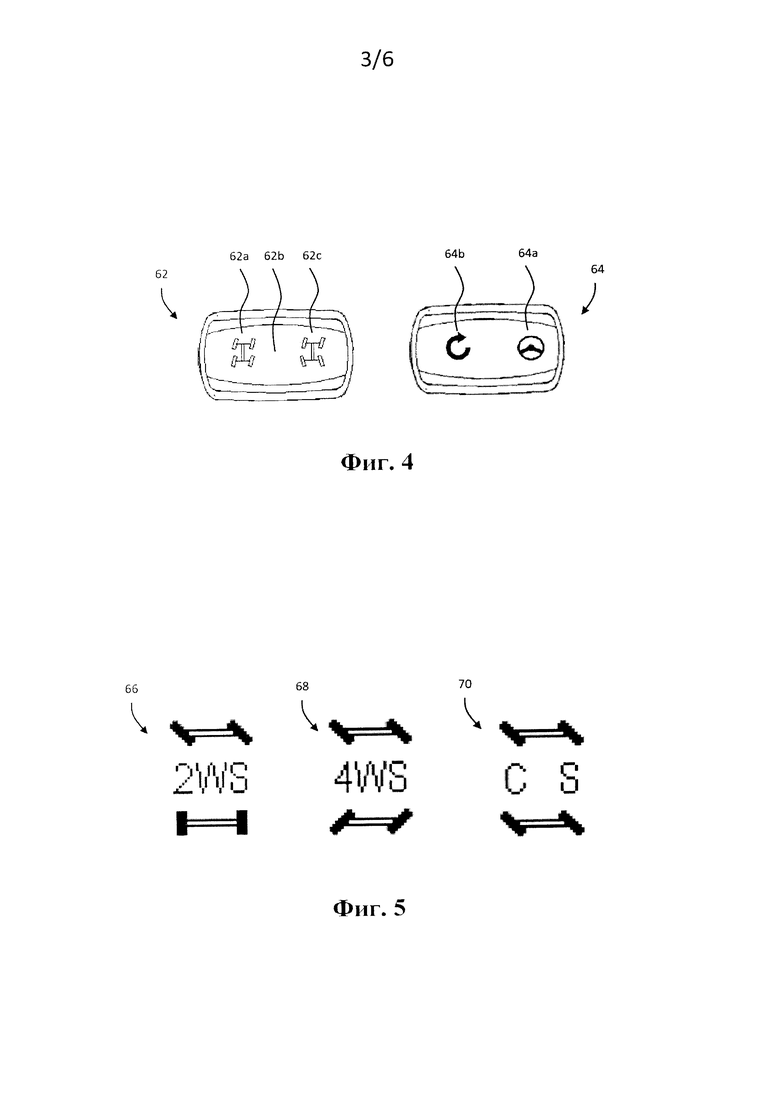
Обращаясь к фиг. 4, отмечаем, что здесь показаны два находящихся в кабине органа 62, 64 управления. Орган 62 рулевого управления представляет собой трехпозиционный кулисный переключатель, имеющий положение 62а для одновременного поворота всех колес в одну сторону, центральное положение 62b (для рулевого управления с приводом на два колеса) и положение 62c для рулевого управления с приводом на четыре колеса. Переключатель 64 сброса рулевого управления представляет собой двухпозиционный переключатель без фиксации положения, имеющий положение 64а (рулевого управления) по умолчанию и положение 64b сброса рулевого управления.
На фиг. 5 показан ряд находящихся в кабине индикаторов, отображаемых для водителя. Подсветка или отображение индикатора 66 указывает, что транспортное средство находится в режиме рулевого управления с приводом на два колеса. Подсветка или отображение индикатора 68 указывает, что транспортное средство находится в режиме рулевого управления с приводом на четыре колеса. Подсветка или отображение индикатора 70 указывает, что транспортное средство находится в режиме одновременного поворота всех колес в одну сторону. Также предусмотрена звуковая сигнализация.
На фиг. 6 показано схематическое изображение системы управления транспортным средством 10, предусматривающего рулевое управление с приводом на четыре колеса. Подробнее показан клапан 44. Клапан 44 имеет три положения 50, 52, 54. В центральное - первое - положение 50 клапан переводится парой противоположно действующих пружин 72, 74. Клапан содержит четырехпозиционный электромагнитный клапан 76 рулевого управления с приводом на четыре колеса, противодействующий пружине 72, устанавливая клапан во второе состояние 52. Клапан содержит электромагнитный клапан 78 одновременного поворота всех колес в одну сторону, противодействующий пружине 74, устанавливая клапан в третье состояние 54.
Первое положение 50 является положением для режима рулевого управления с приводом на два колеса, в котором первый и второй каналы 46а, 46b гидравлически сообщаются. Чтобы осуществить рулевое управление транспортным средством, жидкость для гидравлической системы пропускают из первого клапана рулевого управления (не показан) на одной стороне цилиндра 22, чтобы переместить поршень 24 влево или вправо. Жидкость для гидравлической системы проходит на другую сторону цилиндра через клапан 44. Это приводит к повороту колес 12а, 12b. Второй и третий каналы 48а, 48b блокируются, и поэтому задние колеса 14а, 14b перемещаться не могут.
Во втором положении 52, соответственные противоположные стороны цилиндров 22, 36 гидравлически сообщаются. Это означает, что потребная гидравлическая мощность системы рулевого управления, подводимая (в форме давления) к левой стороне цилиндра 22, будет подведена к правой стороне цилиндра 36. Это приводит к рулевому управлению передними колесами, вызывающему их поворот в направлении поворота, противоположном направлению поворота задних колес.
В третьем положении 54 гидравлически сообщаются соответственные одноименные стороны цилиндров 22, 36. Это означает, что потребная гидравлическая мощность системы рулевого управления, подводимая (в форме давления) к левой стороне цилиндра 22, будет подведена также к левой стороне цилиндра 36. Это обеспечивает режим одновременного поворота всех колес в одну сторону согласно фиг. 1c.
Транспортное средство 10 содержит кузовной контроллер 72, конфигурация которого обеспечивает:
• прием данных команды водителя из органов 62, 64 управления;
• прием данных из датчиков 60, 61 углов поворота;
• передачу данных водителю с помощью индикаторов 66, 68, 70 и звуковой сигнализации; и
• передачу данных команды в электромагнитные клапаны 78, 76.
Метод, в соответствии с которым контроллер 72 обрабатывает принимаемые (вводимые) данные для генерирования передаваемых (выводимых) данных поясняется со ссылками на нижеследующие операции. Отметим, что контроллер 72 запрограммирован с блокировкой, чтобы гарантировать, что изменения режима рулевого управления не разрешаются, если либо (i) скорость транспортного средства больше заранее определенной скорости (составляющей в этом варианте осуществления 10 км/час), либо (ii) транспортное средство движется на заранее определенной или высшей передаче (в этом варианте осуществления - на третьей передаче).
Операция 1 - переход от режима рулевого управления с приводом на четыре колеса к режиму рулевого управления с приводом на два колеса
Обращаясь к фиг. 7, отмечаем, что в начальный момент 100 транспортное средство 10 находится в режиме рулевого управления с приводом на четыре колеса. Находящийся в кабине орган управления - переключатель 62 - находится в положении 62c для рулевого управления с приводом на четыре колеса, а электромагнитный клапан 78 запитан с помощью клапана 44 во втором положении 52. Светится индикатор 68 рулевого управления с приводом на четыре колеса.
Когда оператору нужен режим рулевого управления с приводом на два колеса, он или она переводит переключатель 62 режима рулевого управления из положения 62c для рулевого управления с приводом на четыре колеса, в положение 62b для рулевого управления с приводом на два колеса (этап 102). На этапе 104 определяют угол поворота задних колес 14а, 14b, обращаясь к датчику 60, и если этот угол оказывается нулевым (в пределах заранее определенного допуска), процесс продолжается переходом к этапу 106. Если угол не является нулевым, процесс продолжается переходом к этапу 108.
На этапе 108, на малой скорости будет мигать пиктограмма 66 рулевого управления с приводом на два колеса, и на малой скорости будет звучать звуковая сигнализация. Это указывает водителю, что надо крутить рулевое колесо до тех пор, пока на задних колесах не будет достигнут нулевой угол. На этапе 110 водитель крутит упомянутое колесо. Во время кручения этого колеса, контроллер 72 оперативно контролирует и угол поворота датчиком 60, и скорость изменения угла поворота (т.е., скорость рулевого управления). Контроллер преследует цель ввести транспортное средство в режим рулевого управления с приводом на два колеса, как только угол поворота становится нулевым. Как уже говорилось, имеется собственная задержка между моментом, когда с датчика 60 считывается нулевое показание, и моментом, когда клапан оказывается переведенным в первое положение 50. В системе рулевого управления также существует инерция, которое может вызывать «проскок» при рулевом управлении. Поэтому при более высоких скоростях рулевого управления, контроллер задействует режим рулевого управления с приводом на два колеса прежде, чем будет достигнут нулевой угол.
Это достигается с помощью таблицы соответствия, которая связывает скорость с углом смещения. В частности, в данном варианте осуществления - в качестве примера - используется следующая таблица:
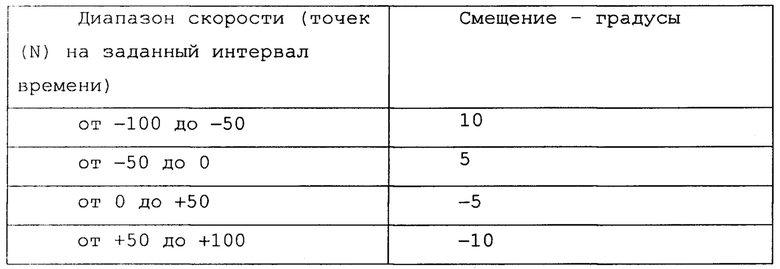
В качестве примера отметим, что если датчик 60 поворачивается на 45 точек за единичный интервал времени, контроллер поспособствует переводу транспортного средства в режим рулевого управления с приводом на два колеса, когда угол, измеренный датчиком, составляет 5 градусов. Иными словами, на малых скоростях ожидается меньший проскок.
На этапе 106 контроллер задействует режим рулевого управления с приводом на два колеса. Посылается сигнал, чтобы прекратить запитывание электромагнитного клапана 78 и таким образом перевести клапан 44 в первое положение 50. При постоянной скорости, в течение заранее определенного времени будет звучать звуковая сигнализация, чтобы подтвердить, что режим рулевого управления с приводом на два колеса задействован. Сейчас будет постоянно отображаться пиктограмма 66 рулевого управления с приводом на два колеса. Теперь машина находится в режиме рулевого управления с приводом на два колеса.
Операция 2 - переход от режима рулевого управления с приводом на четыре колеса к режиму одновременного поворота всех колес в одну сторону
Это операция, в сущности, такая же, как операция 1, но - осуществляемая с помощью соответственных органов управления, индикатора и электромагнитного клапана согласно режиму одновременного поворота всех колес в одну сторону.
Операция 3 - переход от режима рулевого управления с приводом на два колеса, к режиму рулевого управления с приводом на четыре колеса
Обращаясь к фиг. 8, отмечаем, что в начальный момент 120 транспортное средство 10 находится в режиме рулевого управления с приводом на два колеса. Находящийся в кабине орган управления - переключатель 62 - находится в положении 62b для рулевого управления с приводом на два колеса, а клапан 44 находится в первом положении 50. Светится индикатор 66 рулевого управления с приводом на два колеса.
Когда машину эксплуатируют в режиме рулевого управления с приводом на два колеса, а оператору нужен режим рулевого управления с приводом на четыре колеса, оператор переводит переключатель режима рулевого управления в положение 62c для рулевого управления с приводом на четыре колеса (этап 122). Чтобы задействовать режим рулевого управления с приводом на четыре колеса, надо выровнять все четыре колеса, располагая их под нулевым углом поворота.
На этапе 124 определяют углы поворота передних колес 12а, 12b и задних колес 14а, 14b, обращаясь к датчикам 60, 61. Если углы оказываются нулевыми (в пределах заранее определенного допуска), процесс продолжается переходом к этапу 126. Если углы не являются нулевым, процесс продолжается переходом к этапу 128.
На этапе 128, на малой скорости будет мигать пиктограмма 68 рулевого управления с приводом на четыре колеса, и на малой скорости будет звучать звуковая сигнализация. Это указывает водителю, что надо крутить рулевое колесо до тех пор, пока на переднем мосту не будет достигнут нулевой угол (т.е., выравнивание). На этапе 130 водитель крутит упомянутое колесо до тех пор, пока на переднем мосту не будет достигнут нулевой угол (датчики 60, 61 оперативно контролируются контроллером 72).
На этапе 126 контроллер задействует режим рулевого управления с приводом на четыре колеса. Посылается сигнал, чтобы запитать электромагнитный клапан 78 и таким образом перевести клапан 44 во второе положение 52. При постоянной скорости, в течение заранее определенного времени будет звучать звуковая сигнализация, чтобы подтвердить, что режим рулевого управления с приводом на два четыре колеса задействован. Сейчас будет постоянно отображаться пиктограмма 68 рулевого управления с приводом на четыре колеса. Теперь машина находится в режиме рулевого управления с приводом на четыре колеса.
Операция 4 - переход от режима рулевого управления с приводом на два колеса, к режиму одновременного поворота всех колес в одну сторону
Это операция, в сущности, такая же, как операция 3, но - осуществляемая с помощью соответственных органов управления, индикатора и электромагнитного клапана согласно режиму одновременного поворота всех колес в одну сторону.
Операция 5 - переход от режима одновременного поворота всех колес в одну сторону к режиму рулевого управления с приводом на четыре колеса
Данное изобретение имеет преимущество, заключающееся в том, что система может переходить непосредственно от режима одновременного поворота всех колес в одну сторону к режиму рулевого управления с приводом на четыре колеса.
Обращаясь к фиг. 9, отмечаем, что в начальный момент 140 транспортное средство 10 находится в режиме одновременного поворота всех колес в одну сторону. Находящийся в кабине орган управления - переключатель 62 - находится в положении 62а для одновременного поворота всех колес в одну сторону, а клапан 44 находится в третьем положении 54. Светится находящийся в кабине индикатор 70 одновременного поворота всех колес в одну сторону.
Когда машину эксплуатируют в режиме одновременного поворота всех колес в одну сторону, а оператору нужен режим рулевого управления с приводом на четыре колеса, оператор переводит переключатель режима рулевого управления в положение 62c для рулевого управления с приводом на четыре колеса (этап 142). Чтобы задействовать режим рулевого управления с приводом на четыре колеса, надо выровнять все четыре колеса, располагая их под нулевым углом поворота.
На этапе 144 определяют углы поворота передних колес 12а, 12b и задних колес 14а, 14b, обращаясь к датчикам 60, 61. Если углы оказываются нулевыми (в пределах заранее определенного допуска), процесс продолжается переходом к этапу 146. Если углы не являются нулевым, процесс продолжается переходом к этапу 148.
На этапе 148, на малой скорости будет мигать пиктограмма 68 рулевого управления с приводом на четыре колеса, и на малой скорости будет звучать звуковая сигнализация. Это указывает водителю, что надо крутить рулевое колесо до тех пор, пока не будут достигнуты нулевые углы (т.е., выравнивание). На этапе 150 водитель крутит упомянутое колесо до тех пор, пока не будет достигнуты нулевые углы (датчики 60, 61 оперативно контролируются контроллером 72)
На этапе 146 контроллер задействует режим рулевого управления с приводом на четыре колеса. Посылается сигнал, чтобы прекратить запитывание электромагнитного клапана 76 запитать электромагнитный клапан 78 и таким образом перевести клапан 44 во второе положение 52. При постоянной скорости, в течение заранее определенного времени будет звучать звуковая сигнализация, чтобы подтвердить, что режим рулевого управления с приводом на четыре колеса, задействован. Сейчас будет постоянно отображаться пиктограмма 68 рулевого управления с приводом на четыре колеса. Теперь машина находится в режиме рулевого управления с приводом на четыре колеса.
Следует отметить, что если имеется некоторое рассогласование при рулевом управлении, конфигурация системы позволяет предпринять надлежащие коррекции при осуществлении этого способа. Если в режиме одновременного поворота всех колес в одну сторону угол поворота передних колес меньше, чем у задних колес, то, когда угол поворота задних колеса составит ноль градусов, они удерживаются в этом состоянии до тех пор, пока не будут выровнены передние колеса. Если в режиме одновременного поворота всех колес в одну сторону угол поворота передних колес больше, чем у задних колес, то сначала окажется равным нулю угол поворота передних колес. Система подождет до тех пор, пока угол поворота задних колес не составит ноль градусов (а за это время передние колеса совершат проскок). В этот момент задние колеса удерживаются под таким углом поворота, а водитель изменяет направление входного воздействия рулевого управления на противоположное, приводя передние колеса к нулю градусов.
Операция 6 - переход от режима рулевого управления с приводом на четыре колеса, к режиму одновременного поворота всех колес в одну сторону
Это операция, в сущности, такая же, как операция 5, но - осуществляемая с помощью соответственных органов управления, индикатора и электромагнитного клапана согласно режимам одновременного поворота всех колес в одну сторону четырьмя колесами и рулевого управления с приводом на четыре колеса.
Как упоминалось выше, если имеется некоторое рассогласование при рулевом управлении, конфигурация системы позволяет предпринять надлежащие коррекции при осуществлении этого способа. Если в режиме рулевого управления с приводом на четыре колеса угол поворота передних колес меньше, чем у задних колес, то, когда угол поворота задних колес составит ноль градусов, они удерживаются в этом состоянии до тех пор, пока не будут выровнены передние колеса. Если в режиме рулевого управления с приводом на четыре колеса угол поворота передних колес больше, чем у задних колес, то сначала окажется равным нулю угол поворота передних колес. Система подождет до тех пор, пока угол поворота задних колес не составит ноль градусов (а за это время передние колеса совершат проскок). В этот момент задние колеса удерживаются под таким углом поворота, а водитель изменяет направление входного воздействия рулевого управления на противоположное, приводя передние колеса к нулю градусов.
Автоматическая коррекция рулевого управления
Как описано выше, система 11 весьма подходит для изменения режимов рулевого управления транспортным средством. Кроме того, конфигурация системы 11 обеспечивает автоматическую коррекцию нежелательного движения моста.
Когда действует режим рулевого управления с приводом на два колеса, важно, что задний мост остается под нулевым углом поворота. Причина заключается в том, что транспортное средств может двигаться на больших скоростях, при которых важна устойчивость.
Когда транспортного средство не эксплуатировалось на протяжении значительного периода времени, может возникнуть «уход». Гидравлическое давление в заднем домкрате 34 системы рулевого управления может упасть. Это может вызвать некоторый «уход» заднего моста от согласования при осуществлении рулевого управления в первые несколько мгновений эксплуатации.
Контроллер 72 запрограммирован с несколькими диапазонами или «окнами» угла поворота заднего моста. Один диапазон известен как «окно R3 допуска ухода», которое представляет собой заранее определенный диапазон углов поворота с каждой стороны от нуля.
Если уход находится в пределах окна допуска ухода, контроллер 72 попытается скорректировать уход до введения его в пределы окна R5 допуска центрального положения датчика. Автоматическая коррекция сработает в следующих ситуациях:
• скорость транспортного средство меньше, чем заранее определенная максимальная скорость;
• задействован режим рулевого управления с приводом на два колеса;
• положение заднего моста находится в пределах «окна R3 допуска ухода»;
• скорость поворота переднего моста больше, чем заранее определенная минимальная угловая скорость;
• скорость поворота переднего моста меньше, чем заранее определенная максимальная угловая скорость.
Скорость поворота любого моста определяют следующим образом с помощью датчиков 60 или 61. Как упоминалось выше, датчики имеют собственное разрешение r вольт постоянного тока на градус в диапазоне, составляющем R градусов полного диапазона. Количество дискретных точек измерения составляет N=R/r. Скорость поворота измеряют как первую производную параметра N, т.е.,  (точек в секунду). Эта производная будет положительной для одного направления рулевого управления и отрицательной - для другого.
(точек в секунду). Эта производная будет положительной для одного направления рулевого управления и отрицательной - для другого.
Контроллер 72 оперативно контролирует направление рулевого управления передним мостом (т.е., определяет, положительна или отрицательна  ). Затем контроллер 72 активирует либо электромагнитный клапан 76 рулевого управления с приводом на четыре колеса, либо электромагнитный клапан 78 одновременного поворота всех колес в одну сторону, чтобы скорректировать положение заднего моста. Соответственного, электромагнитный клапан работает импульсами по 20 мс, и это повторяется до тех пор, пока задний мост не окажется в пределах окна R5 допуска центрального положения датчика.
). Затем контроллер 72 активирует либо электромагнитный клапан 76 рулевого управления с приводом на четыре колеса, либо электромагнитный клапан 78 одновременного поворота всех колес в одну сторону, чтобы скорректировать положение заднего моста. Соответственного, электромагнитный клапан работает импульсами по 20 мс, и это повторяется до тех пор, пока задний мост не окажется в пределах окна R5 допуска центрального положения датчика.
В следующем примере предполагается, что оба датчика измеряют в одном и том же направлении (например, рулевое управление влево соответствует положительному углу в обоих случаях). Если задний мост имеет угол ухода +100 точек (вследствие чего требуется коррекция на -100 точек), то:
1. если направление движения переднего моста является отрицательным  электромагнитный клапан 76 рулевого управления с приводом на четыре колеса работает импульсами, создавая отрицательное рулевое управление
электромагнитный клапан 76 рулевого управления с приводом на четыре колеса работает импульсами, создавая отрицательное рулевое управление  на заднем мосту; или - в альтернативном варианте:
на заднем мосту; или - в альтернативном варианте:
2. если направление движения переднего моста является положительным  электромагнитный клапан 78 одновременного поворота всех колес в одну сторону работает импульсами, создавая отрицательное рулевое управление
электромагнитный клапан 78 одновременного поворота всех колес в одну сторону работает импульсами, создавая отрицательное рулевое управление  на заднем мосту.
на заднем мосту.
Следовательно, контроллер выбирает электромагнитный клапан, работающий в импульсом режиме, на основе (i) желаемого направления коррекции и (ii) воспринимаемого направления рулевого управления передним мостом.
Как только мост попадает в окно R5 допуска центрального положения датчика, коррекции проводиться не будут до тех пор, пока мост не превысит «окно R4 коррекции сброса», которое находится в пределах окна допуска ухода, но выйдет за пределы окна R5 допуска центрального положения датчика. Это предотвращает постоянное «осуществление поиска» системой 11 и обеспечивает демпфирование, эффективное с точки зрения перспективы управления.
Если уход при рулевом управлении выходит за пределы окна R2 аварийной сигнализации заднего датчика дольше, чем на заранее определенное время (за пределы окна допуска ухода), индикатор 66 рулевого управления с приводом на два колеса, будет мигать на большой скорости, и на большой скорости будет звучать звуковая сигнализация. Это приглашает водителя предпринять рулевое управление вручную следующим образом:
1. водитель переводит переключатель 62 выбора режима рулевого управления в положение 62b для рулевого управления с приводом на два колеса;
2. нажимает и удерживает кнопку 64b сброса системы рулевого управления в течение 2-х секунд и отпускает, когда пиктограмма 66 рулевого управления с приводом на два колеса мигает на меньшей скорости и звуковая сигнализация звучит на меньшей скорости;
3. крутит рулевое колесо в одном из двух направлений, выравнивая задний мост; контроллер 72 будет оперативно контролировать направление рулевого управления (как описано выше) и запитывает либо электромагнитный клапан одновременного поворота всех колес в одну сторону, либо электромагнитный клапан рулевого управления с приводом на четыре колеса, чтобы скорректировать положение заднего моста;
4. Как только задний мост оказывается в пределах окна R5 допуска центрального положения датчика, звуковая сигнализация выключится, а пиктограмма 66 рулевого управления с приводом на два колеса будет непрерывно светиться;
5. Теперь в машине происходит сброс в режим рулевого управления с приводом на два колеса.
На фиг. 9 схематически показаны различные диапазоны, используемые контроллером. Это:
• воспринимаемый диапазон R1;
• окно R2 аварийной сигнализации заднего датчика;
• окно R3 допуска ухода;
• окно R4 коррекции сброса; и
• окно R5 допуска центрального положения датчика.
Отклонения находятся в пределах объема притязаний данного изобретения.
Оба гидравлических цилиндра в рассмотренном варианте осуществления находятся позади мостов, и это означает, что они оба поворачивают колеса в одном и том же направлении, когда к одной стороне приложено давление. В пределах объема притязаний изобретения находятся возможности располагать оба цилиндра спереди мостов, или один впереди и один позади. В последнем примере нагнетание давления на одноименных сторонах цилиндров вызовет поворот колес в противоположных направлениях. Специалист сможет адаптировать вышеизложенное описание с учетом этого.
Отметим также, что можно использовать другие исполнительные механизмы, например исполнительные механизмы с другим гидравлическим приводом от другой жидкости для гидравлической системы или электрические исполнительные механизмы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВОЗДУШНЫМ ПОТОКОМ ЧЕРЕЗ СИСТЕМУ УСИЛИТЕЛЯ РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2017 |
|
RU2719055C2 |
| АДАПТИВНОЕ РУЛЕВОЕ УПРАВЛЕНИЕ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2496673C2 |
| РУЛЕВОЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА СО ВСЕМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 1993 |
|
RU2045435C1 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2749924C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2015 |
|
RU2668771C2 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2587317C1 |
| Рулевое управление транспортного средства | 1988 |
|
SU1558757A1 |
| УСТРОЙСТВО РУЛЕВОГО УПРАВЛЕНИЯ И СПОСОБ РУЛЕВОГО УПРАВЛЕНИЯ | 2013 |
|
RU2632543C2 |
Группа изобретений относится к области транспортного машиностроения. Система рулевого управления мостами строительного транспортного средства содержит мосты, поворотные кулаки, исполнительные механизмы рулевого управления, датчики угловых перемещений и контроллер. Поворотные кулаки прикреплены к мостам с возможностью поворота. Датчики угловых перемещений измеряют поворот между мостом и поворотным кулаком. Контроллер обеспечивает прием данных от датчиков угловых перемещений и управляет исполнительными механизмами рулевого управления. Способ управления системой рулевого управления мостами строительного транспортного средства включает этапы, на которых: принимают данные из датчиков угловых перемещений и управляют исполнительными механизмами рулевого управления; определяют, когда поворот превышает диапазон углов поворота; регулируют поворот до введения его в диапазон углов поворота; определяют направление коррекции поворота; осуществляют рулевое управление транспортным средством. Достигается улучшение точности определения угла поворота. 2 н. и 25 з.п. ф-лы, 13 ил.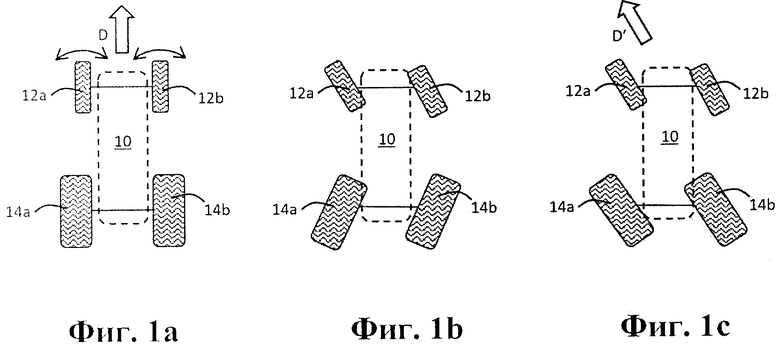
1. Система рулевого управления несколькими мостами строительного транспортного средства, содержащая: первый мост;
первый поворотный кулак, прикрепленный к первому мосту с возможностью поворота относительно оси шкворня первого поворотного кулака;
первый исполнительный механизм рулевого управления, конфигурация которого обеспечивает поворот первого поворотного кулака относительно оси шкворня первого поворотного кулака;
первый датчик угловых перемещений, выполненный с возможностью измерения первого поворота между первым мостом и первым поворотным кулаком относительно оси шкворня первого поворотного кулака;
контроллер, конфигурация которого обеспечивает прием данных из первого датчика угловых перемещений и управление первым исполнительным механизмом рулевого управления в ответ на первый поворот;
второй мост, смещенный от первого в направлении движения транспортного средства; при этом транспортное средство имеет первый режим рулевого управления, в котором рулевое управление транспортным средством осуществляется относительно второго моста и не осуществляется относительно первого моста; и при этом конфигурация контроллера обеспечивает:
определение, когда первый поворот превышает некоторый заранее определенный диапазон углов поворота по обе стороны от нуля;
управление первым исполнительным механизмом рулевого управления с целью регулирования первого поворота до введения его в пределы заранее определенного диапазона углов поворота по обе стороны от нуля;
второй поворотный кулак, прикрепленный ко второму мосту для поворота относительно оси шкворня второго поворотного кулака; и второй исполнительный механизм рулевого управления, конфигурация которого обеспечивает поворот второго поворотного кулака относительно оси шкворня второго поворотного кулака; первый и второй исполнительные механизмы представляют собой гидравлические домкраты двухстороннего действия, каждый из которых имеет первую и вторую стороны; при этом второй исполнительный механизм имеет источник жидкости для гидравлической системы, конфигурация которого обеспечивает подачу находящейся под давлением жидкости для гидравлической системы на одну сторону гидравлического домкрата двухстороннего действия с целью поворота второго поворотного кулака; транспортное средство имеет второй режим рулевого управления, в котором первая сторона первого исполнительного механизма гидравлически сообщается с первой стороной второго исполнительного механизма и в котором вторая сторона первого исполнительного механизма гидравлически сообщается со второй стороной второго исполнительного механизма; и транспортное средство имеет третий режим рулевого управления, в котором первая сторона первого исполнительного механизма гидравлически сообщается со второй стороной второго исполнительного механизма и в котором вторая сторона первого исполнительного механизма гидравлически сообщается с первой стороной второго исполнительного механизма;
второй датчик угловых перемещений, выполненный с возможностью измерения второго поворота между вторым мостом и вторым поворотным кулаком, при этом конфигурация контроллера обеспечивает прием данных из второго датчика угловых перемещений;
контроллер во время последовательности автоматической коррекции для автоматической коррекции нежелательного осевого движения обеспечивает:
определение направления осуществляемой при рулевом управлении коррекции первого поворота с помощью первого датчика;
определение направления второго поворота с помощью второго датчика в процессе рулевого управления транспортным средством; и
выбор второго или третьего режима рулевого управления на основе направления осуществляемой при рулевом управлении коррекции первого поворота и направления второго поворота с целью регулирования первого поворота до введения его в пределы заранее определенного диапазона углов поворота по обе стороны от нуля.
2. Система по п.1, в которой второй режим рулевого управления является режимом одновременного поворота всех колес в одну сторону, в котором первый и второй поворотные кулаки поворачиваются в одном и том же направлении, а третий режим рулевого управления является режимом рулевого управления с приводом на четыре колеса, в котором первый и второй поворотные кулаки поворачиваются в противоположных направлениях.
3. Система рулевого управления несколькими мостами строительного транспортного средства по п.1 или 2, содержащая клапан, имеющий некоторое положение для каждого из первого, второго и третьего режимов.
4. Система по п.3, в которой клапан переведен в первый режим и содержит по меньшей мере один контроллер исполнительного механизма за счет конфигурации упомянутого ранее контроллера, вынуждающей перевод клапана во второй и/или третий режим.
5. Система по п.3, в которой клапан находится в центральном положении в первом режиме и содержит два исполнительных механизма, конфигурация которых обеспечивает вынуждаемый перевод клапана в положение либо для второго, либо для третьего режима соответственно.
6. Система по любому из пп.1-5, характеризующаяся тем, что конфигурация контроллера обеспечивает:
прием входного воздействия водителя, которое связано с запрашиваемым изменением режима рулевого управления транспортным средством;
определение, когда первый поворот удовлетворяет заранее определенному критерию, указывающему, что достигнут центр;
и изменение режима рулевого управления транспортным средством, когда первый режим рулевого управления удовлетворил заранее определенному критерию.
7. Система по п.6, в которой режим рулевого управления транспортным средством изменяют с рулевого управления с приводом на четыре колеса или одновременного поворота всех колес в одну сторону на рулевое управление с приводом на два колеса.
8. Система по п.6, в которой режим рулевого управления транспортным средством изменяют на рулевое управление с приводом на четыре колеса или одновременный поворот всех колес в одну сторону, и при этом конфигурация контроллера обеспечивает: определение, когда второй поворот удовлетворяет заранее определенному критерию, указывающему, что достигнут центр; и изменение режима рулевого управления транспортным средством, когда второй режим рулевого управления удовлетворил заранее определенному критерию.
9. Система по п.1, содержащая исполнительный механизм, управляемый контроллером, для выбора второго или третьего режима рулевого управления, при этом исполнительный механизм в импульсном режиме обеспечивает регулирование посредством положительных приращений первого поворота до введения его в пределы заранее определенного диапазона углов поворота по обе стороны от нуля.
10. Система по любому из пп.1-9, в которой конфигурация контроллера обеспечивает определение угловой скорости первого поворота из первого датчика угловых перемещений и управление первым исполнительным механизмом рулевого управления на основе этой угловой скорости поворота.
11. Система по п.10, в которой конфигурация контроллера обеспечивает: запоминание желаемого первого поворота; оперативный контроль первого поворота; оперативный контроль угловой скорости первого поворота; отдание первому исполнительному механизму команды останова прежде, чем первый поворот достигает желаемого поворота, на основе угловой скорости первого поворота.
12. Система по п.11, в которой конфигурация контроллера обеспечивает: отдание первому исполнительному механизму команды остановить дальнейший поворот с момента достижения желаемого первого поворота, когда угловая скорость первого поворота увеличивается.
13. Способ управления системой рулевого управления несколькими мостами строительного транспортного средства по п.1, включающий в себя этапы, на которых:
принимают данные из первого и второго датчиков угловых перемещений и управляют первым исполнительным механизмом рулевого управления в ответ на измеряемый поворот;
определяют, когда первый поворот превышает заранее определенный диапазон углов поворота по обе стороны от нуля; регулируют первый поворот до введения его в пределы заранее определенного диапазона углов поворота по обе стороны от нуля с помощью первого исполнительного механизма рулевого управления;
определяют направление осуществляемой при рулевом управлении коррекции первого поворота с помощью первого датчика;
осуществляют рулевое управление транспортным средством;
определяют направление второго поворота с помощью второго датчика в процессе рулевого управления транспортным средством; и
выбирают второй или третий режим рулевого управления на основе направления осуществляемой при рулевом управлении коррекции первого поворота и направления второго поворота с целью регулирования первого поворота до введения его в пределы заранее определенного диапазона углов поворота по обе стороны от нуля.
14. Способ по п.13, включающий в себя этапы, на которых:
вводят транспортное средство в первый режим рулевого управления, в котором рулевое управление транспортным средством осуществляется относительно второго моста и не осуществляется относительно первого моста;
определяют, когда первый поворот превышает заранее определенный диапазон углов поворота по обе стороны от нуля; и
управляют первым исполнительным механизмом рулевого управления с целью регулирования первого поворота до введения его в пределы заранее определенного диапазона углов поворота по обе стороны от нуля.
15. Способ по п.14, включающий в себя этапы, на которых:
вводят транспортное средство во второй режим рулевого управления, в котором первая сторона первого исполнительного механизма гидравлически сообщается с первой стороной второго исполнительного механизма и в котором вторая сторона первого исполнительного механизма гидравлически сообщается со второй стороной второго исполнительного механизма.
16. Способ по п.15, включающий в себя этап, на котором:
вводят транспортное средство в третий режим рулевого управления, в котором первая сторона первого исполнительного механизма гидравлически сообщается со второй стороной второго исполнительного механизма и в котором вторая сторона первого исполнительного механизма гидравлически сообщается с первой стороной второго исполнительного механизма.
17. Способ по п.16, в котором второй режим рулевого управления является режимом одновременного поворота всех колес в одну сторону, в котором первый и второй поворотные кулаки поворачиваются в одном и том же направлении, а третий режим рулевого управления является режимом рулевого управления с приводом на четыре колеса, в котором первый и второй поворотные кулаки поворачиваются в противоположных направлениях.
18. Способ по п.16 или 17, включающий в себя этап, на котором:
обеспечивают клапан, имеющий некоторое положение для каждого из первого, второго и третьего режимов.
19. Способ по п.18, включающий в себя этапы, на которых:
осуществляют упругий перевод клапана в первый режим; обеспечивают, по меньшей мере, один исполнительный механизм; и используют исполнительный механизм для принудительного перевода клапана во второй и/или третий режим.
20. Способ по п.18, включающий в себя этапы, на которых:
обеспечивают первый исполнительный механизм клапана; обеспечивают второй исполнительный механизм клапана;
используют первый исполнительный механизм клапана для введения транспортного средства во второй режим рулевого управления; и
используют второй исполнительный механизм клапана для введения транспортного средства в третий режим рулевого управления.
21. Способ по п.13, включающий в себя этапы, на которых:
принимают входное воздействие водителя, связанное с запрашиваемым изменением режима рулевого управления транспортным средством;
определяют, когда первый поворот удовлетворяет заранее определенному критерию, указывающему, что достигнут центр; и
изменяют режим рулевого управления транспортным средством, когда первый режим рулевого управления удовлетворил заранее определенному критерию.
22. Способ по п.21, включающий в себя этапы, на которых:
изменяют режим рулевого управления транспортным средством с рулевого управления с приводом на четыре колеса или одновременного поворота всех колес в одну сторону на рулевое управление с приводом на два колеса.
23. Способ по п.21, включающий в себя этапы, на которых:
изменяют режим рулевого управления транспортным средством на рулевое управление с приводом на четыре колеса или одновременный поворот всех колес в одну сторону;
определяют, когда второй поворот удовлетворяет заранее определенному критерию, указывающему, что достигнут центр; и изменяют режим рулевого управления транспортным средством, когда второй режим рулевого управления удовлетворил заранее определенному критерию.
24. Способ по п.13, включающий в себя этапы, на которых: обеспечивают исполнительный механизм для выбора второго или третьего режима рулевого управления;
эксплуатируют исполнительный механизм в импульсном режиме для осуществляемого положительными приращениями регулирования первого поворота до введения его в пределы заранее определенного диапазона углов поворота по обе стороны от нуля.
25. Способ по любому из пп.13-24, включающий в себя этапы, на которых:
определяют угловую скорость первого поворота из первого датчика угловых перемещений; и управляют первым исполнительным механизмом рулевого управления на основе этой угловой скорости поворота.
26. Способ по п.25, включающий в себя этапы, на которых: запоминают желаемый первый поворот; оперативно контролируют первый поворот;
оперативно контролируют угловую скорость первого поворота; останавливают первый исполнительный механизм прежде, чем первый поворот достигает желаемого поворота, на основе угловой скорости первого поворота.
27. Способ по п.26, включающий в себя этап, на котором:
останавливают первый исполнительный механизм, предотвращая дальнейший поворот от желаемого первого поворота, когда угловая скорость первого поворота увеличивается.
| Способ обработки доменного шлакового расплава | 1976 |
|
SU597655A1 |
| DE 10304796 A1, 26.08.2004 | |||
| РУЛЕВОЕ УПРАВЛЕНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА С ПЕРЕДНИМИ И ЗАДНИМИ УПРАВЛЯЕМЫМИ КОЛЕСАМИ | 2000 |
|
RU2186701C2 |
| РУЛЕВОЕ УПРАВЛЕНИЕ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2137649C1 |
| Способ и приспособление для разгрузки силосов для свекловицы | 1926 |
|
SU6380A1 |

