Изобретение относится к транспортному машиностроению, а именно к рулевым средствам транспортных средств повышенной проходимости.
Известно рулевое управление транспортного средства, см. патент РФ №2160205, 10.12.2000. Данное рулевое управление содержит рулевое колесо, кинематически связанное через рулевой механизм с корпусом распределителя передних колес. Золотник распределителя передних колес гидравлически связан с насосом и баком гидроусилителя, исполнительным гидроцилиндром передних колес и кинематически связан со штоком гидроцилиндра и рулевым приводом передних колес. Корпус распределителя задних колес кинематически связан с рулевым приводом передних колес, а его золотник гидравлически связан с насосом и баком гидроусилителя, исполнительным гидроцилиндром задних колес, кинематически связан со штоком гидроцилиндра и рулевым приводом задних колес. При этом в рулевом управлении установлен мальтийский механизм, состоящий из двух кривошипов с цевками и креста, установленных на осях, неподвижно связанных с рамой транспортного средства, причем кривошипы соединены с рулевым приводом передних колес, а крест - с рулевыми приводами задних колес. Недостатком данного рулевого управления является сложность конструкции и недостаточная проходимость транспортного средства, управляемого данным рулевым управлением.
Наиболее близким техническим решением является рулевое управление транспортного средства, см. патент РФ №2059498 от 10.05.1996. В данном патенте описано рулевое управление транспортного средства с управляемыми колесами. Управление колесами осуществляется посредством исполнительных механизмов - гидроцилиндрами поворота на каждой оси. Недостатком данного решения является отсутствия обеспечения обратной связи осей.
Технический результат заявляемого технического решения - улучшение проходимости транспортного средства за счет непрерывного отслеживания реального положения осей с помощью датчиков.
Технический результат достигается тем, что рулевое управление транспортного средства повышенной проходимости, содержит:
- рулевое колесо с насосом-дозатором, которое гидравлически связано с первым насосом и гидробаком гидроусилителя, а также с исполнительным гидроцилиндром передней оси;
- исполнительные гидроцилиндры второй, третьей и четвертой осей, каждый из которых гидравлически связан с гидрораспределителем, первый выход которого гидравлически связан с фильтром, вторым насосом и гидробаком, а второй выход - посредством радиатора с гидробаком, при этом на каждой оси установлен датчик положения, каждый из которых связан с управляющим контроллером, а управляющий контроллер исходя из выбранной программы руления и угла поворота передних колес управляет гидрораспределителем, который выставляет нужным образом колеса остальных трех осей.
Предпочтительно гидробак должен содержать датчик контроля уровня масла.
Кроме того, гидрораспределитель гидравлически связан с гидравлической лебедкой.
Предлагаемое рулевое управление транспортного средства повышенной проходимости предназначено для эксплуатации в различных дорожных и климатических условиях. Для достижения нужных технических характеристик применена рулевая система с независимым управлением и контролем положения всех 4-х поворотных осей. Такая конфигурация обеспечивает различные режимы системы руления:
- режим «шоссе» (поворачивают только первые две оси). Применяется при движении на высоких скоростях;
- режим «подруливание» (поворачивают две передние оси в одну сторону, а задние две оси в противоположную). Применяется при движении на небольших скоростях для маневрирования в ограниченном пространстве;
- режим «краб» (все оси поворачивают в одну сторону). Применяется для движения вдоль глубокой колеи, а также для решения иных сложных задач по преодолению бездорожья.
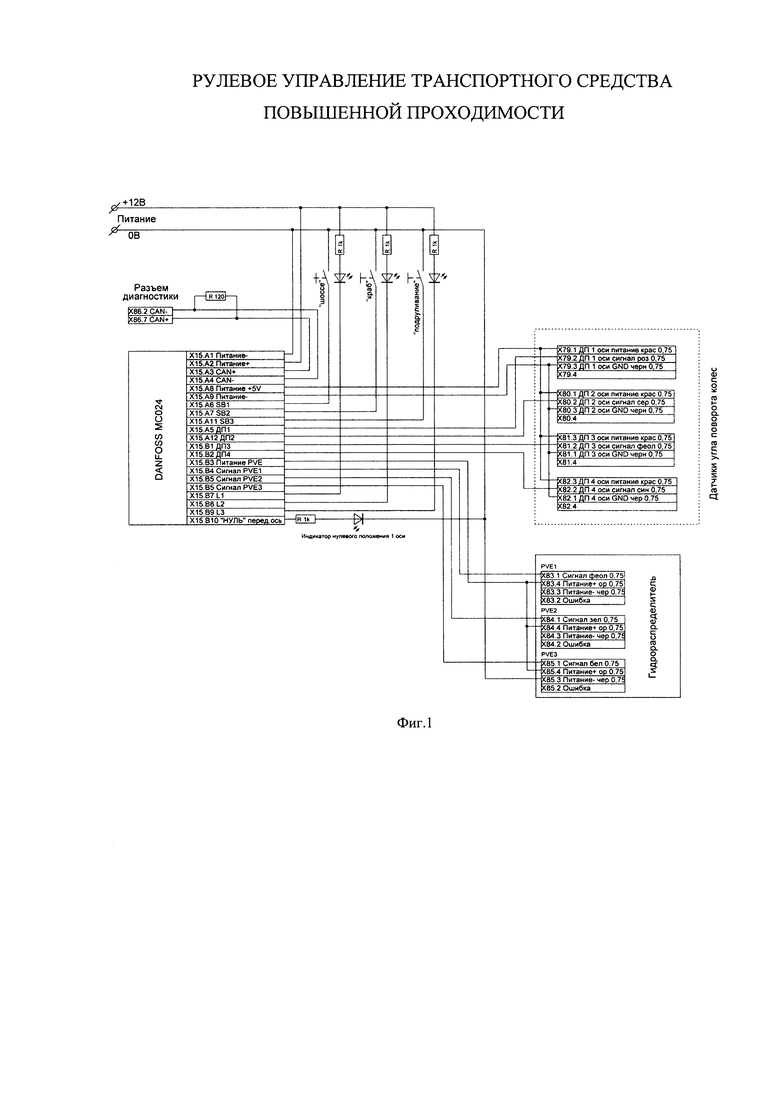
Выбор режима руления производится с помощью соответствующей кнопки на пульте управления трансмиссией с рабочего места водителя. Выбор нужного режима подтверждается светодиодным индикатором.
Для особо тяжелых дорожных условий на транспортном средстве установлена гидравлическая лебедка. Управление лебедкой осуществляется с помощью проводного выносного пульта, подключаемого к разъему в салоне.
Изобретение поясняется фиг. 1-3.
Система рулевого управления и механизма лебедки транспортного средства повышенной проходимости состоит из двух подсистем:
- электрической (управление),
- гидравлической (исполнительные механизмы).
Электрическая система управления показана на фиг. 1 и состоит из программируемого контроллера DANFOSS МС024 (с необходимым программным обеспечением), датчиков положения всех 4-х осей, кнопок и индикаторов выбора режима руления, пульта управления лебедкой, электроуправляемых золотников гидрораспределителя, электрических жгутов и соединителей.
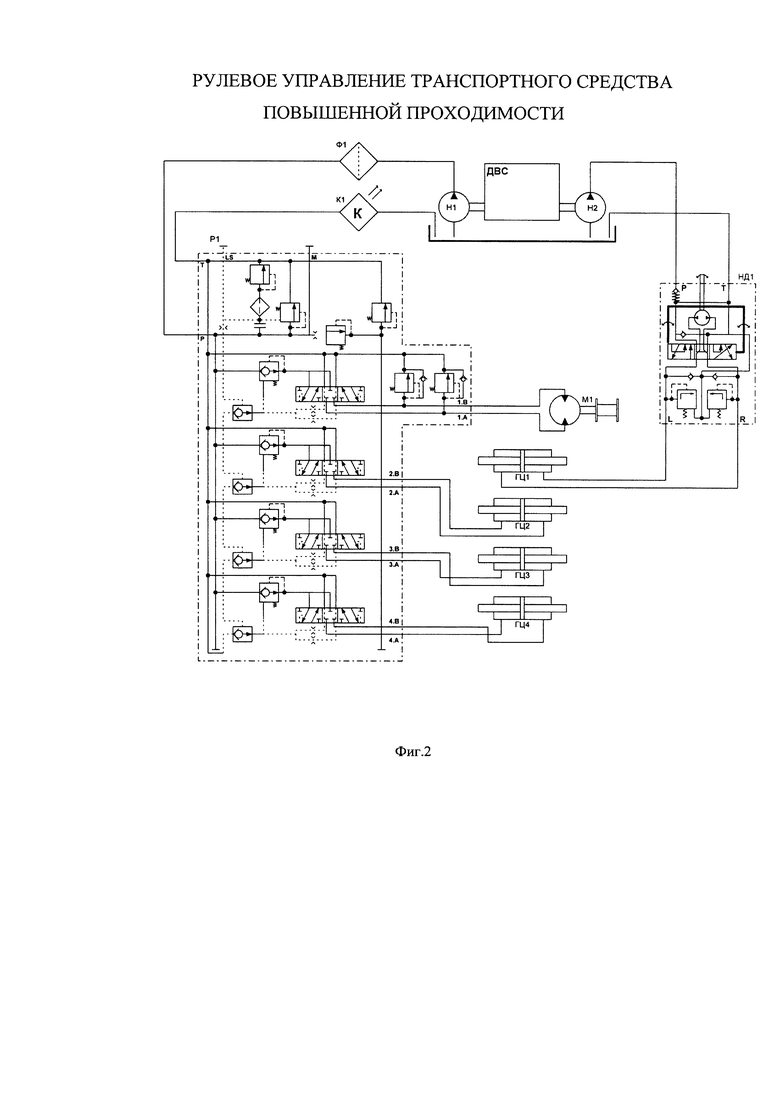
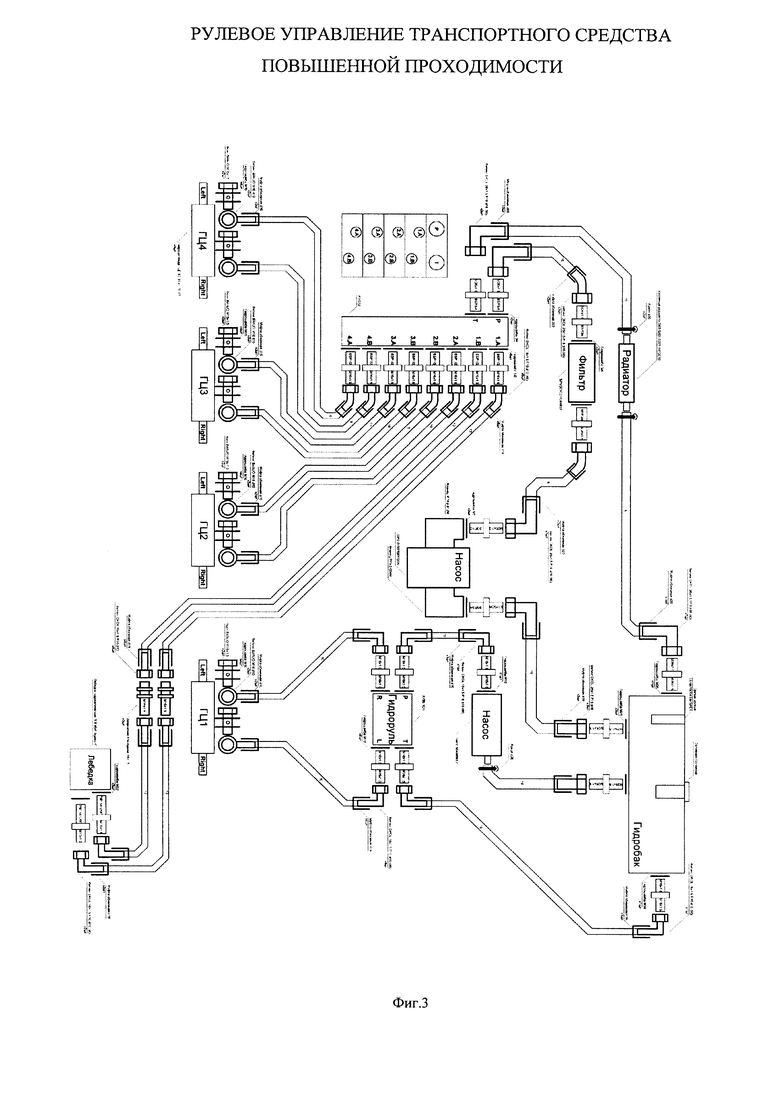
Гидравлическая система показана на фиг. 2, 3 и состоит из двух гидронасосов H1 и H2, гидрораспределителя P1, насоса-дозатора (гидроруль) НД1, 4-х гидроцилиндров ГЦ1-4, лебедки с гидромотором, фильтра Ф1, радиатора K, бака рабочей жидкости с датчиком низкого уровня масла, гидравлических рукавов и фитингов.
Гидросистема имеет два контура: контур управления передней осью с помощью насоса-дозатора на рулевом валу, и контур управления остальными осями и лебедкой с помощью электронного гидрораспределителя.
Вращая рулевое колесо, водитель задает угол поворота колес передней оси. Значение этого угла фиксируется датчиком и поступает в управляющий контроллер. Далее, исходя из выбранной программы руления и угла поворота передних колес контроллер посылает соответствующие сигналы на гидрораспределитель и выставляет нужным образом колеса остальных трех осей (их реальное положение непрерывно отслеживается с помощью датчиков, установленных на каждой оси). Исполнительными элементами системы, воздействующими на рулевые тяги, являются гидроцилиндры двухстороннего действия с двухсторонним штоком.
Секция лебедки гидрораспределителя не связана с контроллером и управляется непосредственно выносным пультом.
Заявленное рулевое управление может быть осуществлено с помощью известных в области техники средств и компонентов и соответствует условию "промышленная применимость".
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО НАКЛОНА УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА ПРИ ПОВОРОТЕ | 1999 |
|
RU2176204C2 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1987 |
|
SU1497091A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАКТОРА С РОБОТИЗИРОВАННОЙ МЕХАНИЧЕСКОЙ КОРОБКОЙ ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ | 2021 |
|
RU2771704C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| МЕХАНИЗМ УПРАВЛЕНИЯ ПОЛНОПРИВОДНОГО ТРАНСПОРТНОГО СРЕДСТВА С ПРИТОРМАЖИВАНИЕМ НЕУПРАВЛЯЕМЫХ КОЛЕС | 1999 |
|
RU2165864C2 |
| Гидравлическая система рулевого управления транспортного средства (ее варианты) | 1983 |
|
SU1084167A1 |
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| Рулевое управление транспортного средства | 1988 |
|
SU1558757A1 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1988 |
|
SU1565741A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
Изобретение относится к рулевому управлению транспортного средства повышенной проходимости. Устройство содержит рулевое колесо с насосом-дозатором, которое гидравлически связано с первым насосом и гидробаком гидроусилителя, а также с исполнительным гидроцилиндром передней оси, исполнительные гидроцилиндры второй, третьей и четвертой осей, каждый из которых гидравлически связан с гидрораспределителем, первый выход которого гидравлически связан с фильтром, вторым насосом и гидробаком, а второй выход - посредством радиатора с гидробаком. На каждой оси транспортного средства установлен датчик положения, каждый из которых связан с управляющим контроллером, а управляющий контроллер исходя из выбранной программы руления и угла поворота передних колес управляет гидрораспределителем, который выставляет нужным образом колеса остальных трех осей. Технический результат - улучшение проходимости транспортного средства за счет непрерывного отслеживания реального положения осей с помощью датчиков. 2 з.п. ф-лы, 3 ил.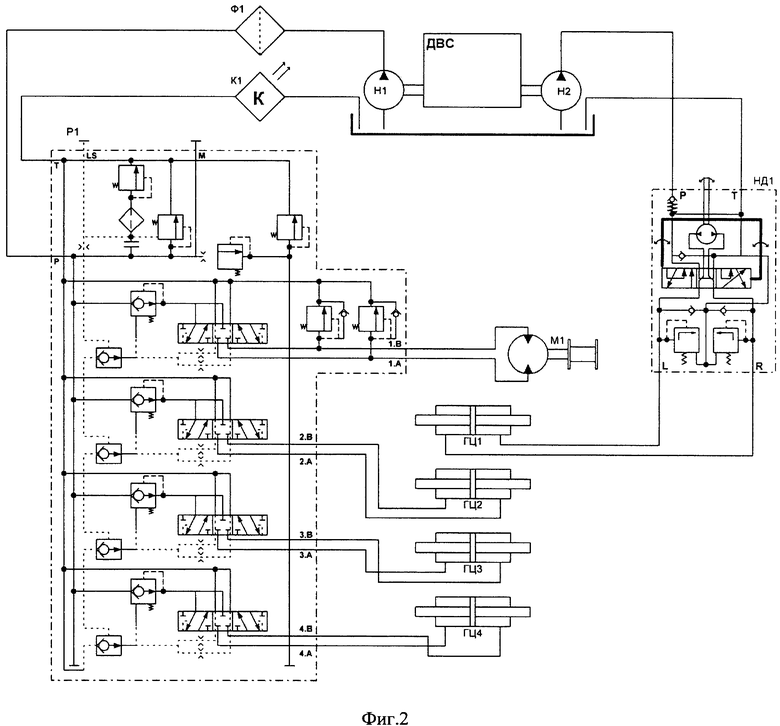
1. Рулевое управление транспортного средства повышенной проходимости, содержащее: рулевое колесо с насосом-дозатором, которое гидравлически связано с первым насосом и гидробаком гидроусилителя, а также с исполнительным гидроцилиндром передней оси; исполнительные гидроцилиндры второй, третьей и четвертой осей, каждый из которых гидравлически связан с гидрораспределителем, первый выход которого гидравлически связан с фильтром, вторым насосом и гидробаком, а второй выход - посредством радиатора с гидробаком, при этом на каждой оси установлен датчик положения, каждый из которых связан с управляющим контроллером, а управляющий контроллер исходя из выбранной программы руления и угла поворота передних колес управляет гидрораспределителем, который выставляет нужным образом колеса остальных трех осей.
2. Рулевое управление транспортного средства повышенной проходимости по п. 1, отличающееся тем, что гидробак содержит датчик контроля уровня масла.
3. Рулевое управление транспортного средства повышенной проходимости по п. 1, отличающееся тем, что гидрораспределитель гидравлически связан с гидравлической лебедкой.
| RU 2059498 C1, 10.05.1996 | |||
| Фрезер | 1979 |
|
SU870671A2 |
| CN 201961369 U, 07.09.2010 | |||
| WO 2013078905 A1, 06.06.2013 | |||
| FR 2952893 A1, 27.05.2011. | |||

