ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка испрашивает приоритет согласно предварительной заявке на европейский патент № 17199478.3, поданной 31.10.2017 г., раскрытие которой включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к несущему винту для аппарата, способного зависать в воздухе, в частности, к несущему винту для вертолета.
Настоящее изобретение также относится к способу сдерживания вибраций, передаваемых на вал несущего винта летательного аппарата, способного зависать в воздухе.
УРОВЕНЬ ТЕХНИКИ
Вертолеты, как известно, в основном содержат фюзеляж, главный несущий винт, расположенный наверху фюзеляжа с возможностью вращения вокруг собственной оси, и хвостового винта, расположенного в конце фюзеляжа.
Более детально несущий винт, в свою очередь, как правило, содержит втулку с возможностью вращения вокруг вышеупомянутой оси, оснащенную множеством лопастей, жестко прикрепленных радиально и выступающих из вышеупомянутой втулки, и вал, который может соединяться с приводным элементом, и функционально связан с втулкой для управления ею при вращении.
В процессе эксплуатации работа несущего винта вызывает высоко- и низкочастотные вибрации. Точнее говоря, низкочастотные вибрации создаются струей воздуха, отделяющейся от лопастей и от центра втулки. Такое отделение происходит в центре втулки и воздействует на все вертикальные и горизонтальные аэродинамические поверхности хвоста и хвостового винта.
В процессе эксплуатации вращение лопастей при высоких угловых скоростях приводит к возникновению высокочастотных вибраций, которые передаются на вал и, вследствие этого, на фюзеляж, создавая дискомфорт для находящихся внутри фюзеляжа.
Точнее говоря, вибрационные нагрузки действуют на втулку и на вал, как в осевом направлении, так и перпендикулярно к оси вращения вала.
В отрасли известно, что вибрационные нагрузки, действующие на несущий винт, имеют частоту повторения импульсов N*Ω и соответствующие относительные коэффициенты в координатной системе навигации, встроенной в фюзеляж, где Ω - это скорость вращения вала, а N - число лопастей несущего винта.
Другими словами, втулка и вал передают импульсы вибрационной аэродинамической нагрузки, действующей в плоскости лопастей на вышеупомянутые импульсы.
Из вышесказанного ясно, что в рамках отрасли несомненно назрела необходимость в ограничении передачи вибраций от вала к фюзеляжу с вышеупомянутой частотой повторения импульсов N*Ω и соответствующими относительными коэффициентами.
Для этой цели используются пассивные и активные демпфирующие устройства.
Пассивные демпфирующие устройства в основном содержат массы, упруго подвешенные от вала или втулки. Вибрация этих подвешенных масс позволяет по меньшей мере частично рассеивать вибрацию на валу и втулке.
Пассивные демпфирующие устройства обычно настраиваются на предварительно заданную частоту, для чего желательно локализовать передачу на вал.
И наоборот, активные демпфирующие устройства представляют собой главным образом приводы, оказывающие синусоидальное демпфирующее усилие на втулку или вал, которое противодействует силе, порождаемой вибрациями.
Пример пассивного демпфирующего устройства показан в заявке на патент PCTIB2008001594.
В данной заявке на патент описывается демпфирующее устройство, способное ограничивать возникновение и передачу таких вибраций на вал несущего винта простым и малозатратным способом, не создавая помехи для аэродинамики и работы несущего винта и/или потокового конвейера.
Точнее говоря, вышеупомянутое демпфирующее устройство обычно содержит:
- массу, находящуюся внутри потокового конвейера; и
- шток, который коаксиально опирается на вал первым концом своей оси и соединен с массой вторым концом своей оси, противоположным первому.
Точнее говоря, осевая жесткость штока достаточно высока, чтобы удерживать массу фактически в фиксированном положении вдоль оси несущего винта.
С другой стороны, жесткость штока при изгибе такова, что допускает вибрацию массы в плоскости, перпендикулярной оси несущего винта и с частотой, соответствующей импульсам N*Ω, и, таким образом, противодействует передаче изгибных вибраций, создаваемых вращением втулки и лопастей, на вал.
Из указанного следует, что описанное выше демпфирующее устройство способно только эффективно противодействовать передаче изгибных вибраций на вал в плоскости, практически перпендикулярной оси несущего винта, при этом частота этих вибраций примерно соответствует точному значению, определяемому жесткостью штока при изгибе и весом массы.
В рамках отрасли несомненно назрела необходимость также в эффективном противодействии передаче осевых вибраций на вал, т.е. вибраций, параллельных оси вала. Подобным образом назрела необходимость в создании прежде всего компактных и малогабаритных демпфирующих устройств, оказывающих минимально возможное влияние на расположение несущего винта и вала.
И наконец, демпфирующие устройства обычно настраиваются на номинальную частоту повторения импульсов N*Ω перед установкой внутрь несущего винта вертолета.
Действительное значение импульсов N*Ω, зарегистрированных в ходе эффективной работы несущего винта, может несколько отличаться от этого номинального значения.
Таким образом, созрела необходимость в возможности дополнительного регулирования частоты настройки демпфирующих устройств на фактическую частоту повторения импульсов вибраций, передаваемых на вал, после того, как демпфирующее устройство будет установлено на вертолет.
US-A-2010/296930, US-A-2011/268573, US-A-5647726, US-A-4596513 и US-A-2010/296931 описывают несущий винт для летательного аппарата, способного зависать в воздухе, согласно ограничительной части по п. 1 и способу сдерживания вибраций, передаваемых на вал несущего винта летательного аппарата, согласно ограничительной части по п. 10.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения заключается в создании несущего винта для летательного аппарата, способного зависать в воздухе, который позволяет удовлетворить по меньшей мере одну из вышеуказанных потребностей простым и малозатратным способом.
Вышеупомянутая задача выполняется с помощью настоящего изобретения, в части, касающейся несущего винта для летательного аппарата, способного зависать в воздухе, по п. 1 или п. 23.
Настоящее изобретение также относится к способу сдерживания вибраций, передаваемых на вал несущего винта летательного аппарата, по п. 24 или п. 27.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения в дальнейшем в этом документе описываются два предпочтительных варианта осуществления исключительно посредством неограничивающего примера и со ссылкой на прилагаемые чертежи, в которых
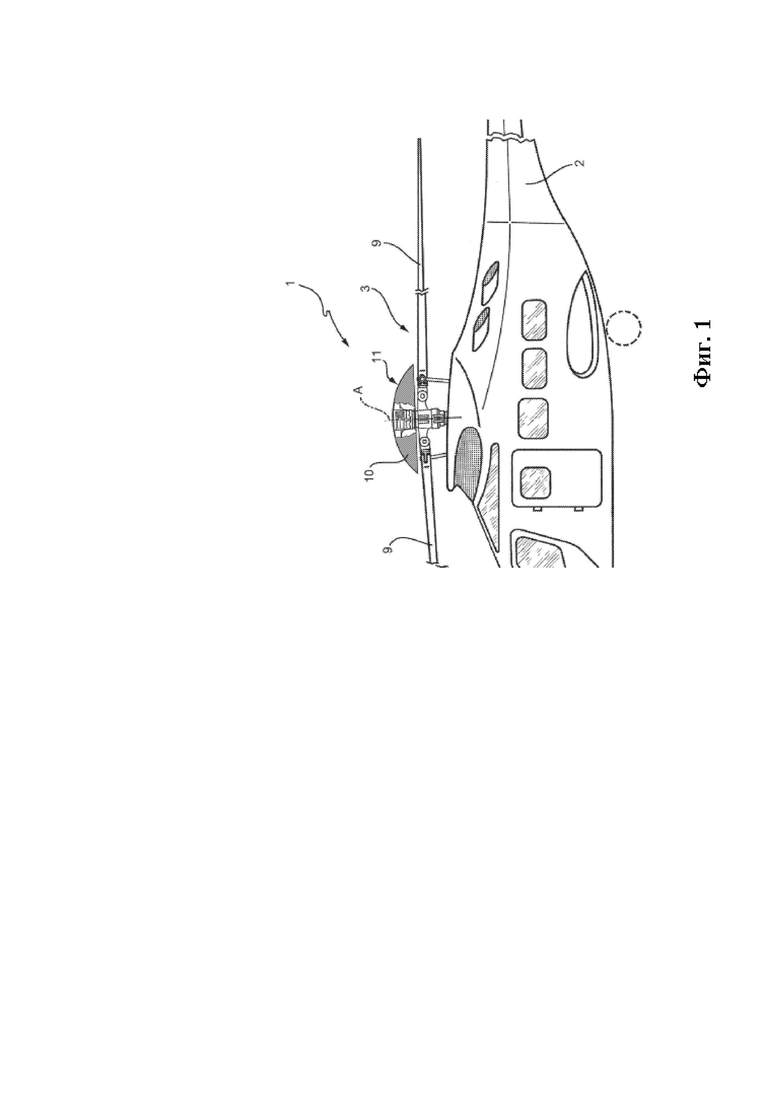
- фигура 1 - вид сбоку вертолета, содержащего несущий винт согласно первому варианту осуществления настоящего изобретения;
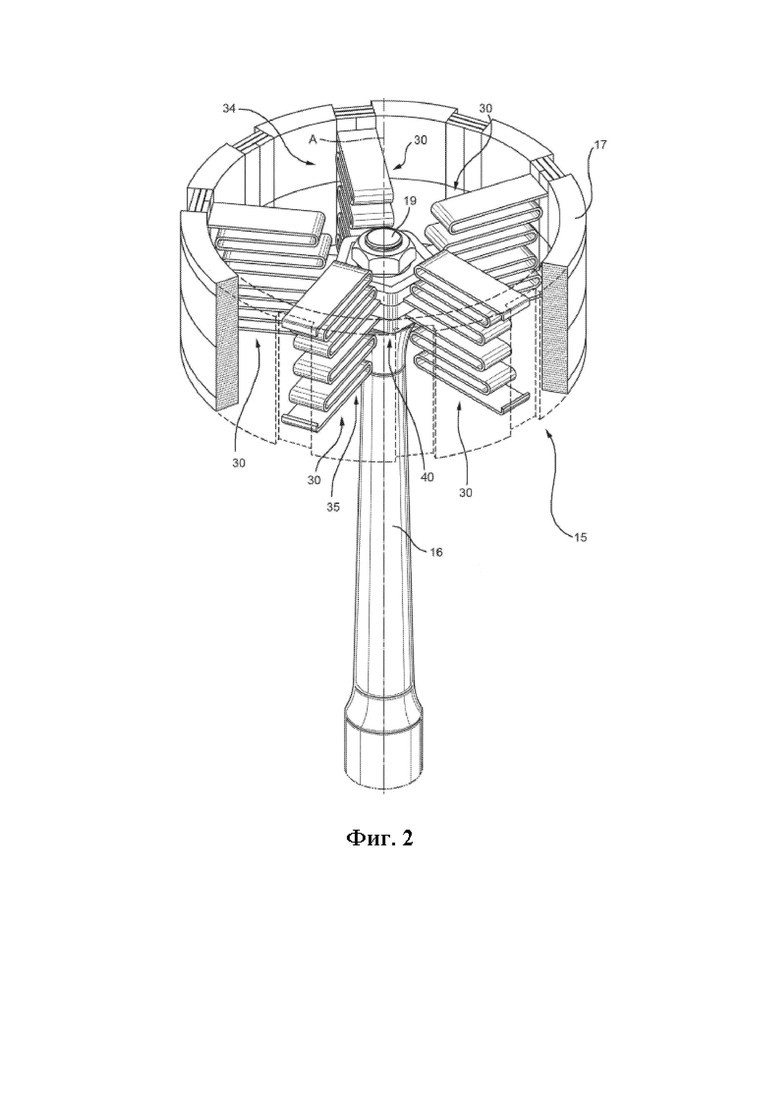
- фигура 2 - перспективный вид в сильно увеличенном масштабе демпфирующего устройства, установленного в несущем винте на фигуре 1;
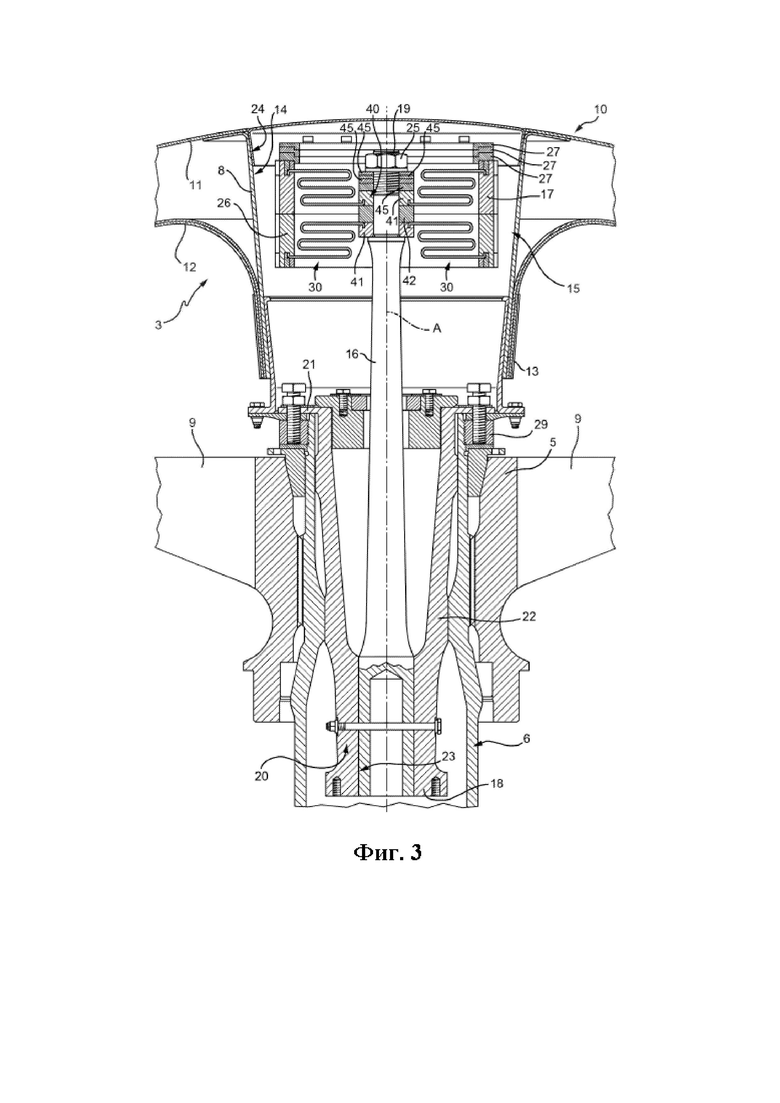
- фигура 3 - осевое сечение несущего винта на фигуре 2, при этом детали удалены для лучшего понимания;
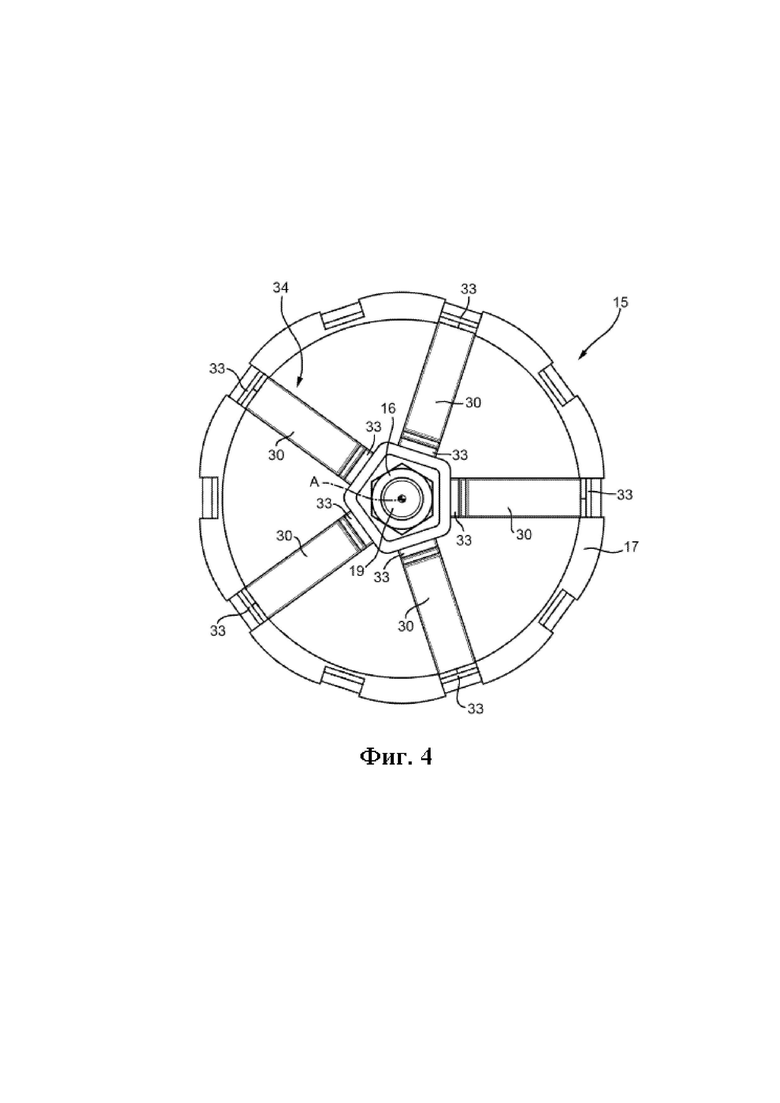
- фигура 4 - вид сверху демпфирующего устройства на фигурах 2 и 3;
- фигура 5 - перспективный вид в сильно увеличенном масштабе детали демпфирующего устройства на фигурах с 2 по 4;
- фигура 6 - перспективный вид демпфирующего устройства, установленного в несущем винте, согласно второму варианту осуществления настоящего изобретения;
- фигура 7 - сечение несущего винта на фигуре 6 по линии VII-VII на фигуре 6;
- фигура 8 - перспективный вид в сильно увеличенном масштабе детали демпфирующего устройства на фигурах 6 и 7; и
- фигура 9 - перспективный вид в сильно увеличенном масштабе дополнительной детали демпфирующего устройства на фигуре 8.
ЛУЧШИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Со ссылкой на фигуру 1 номер позиции 1 обозначает летательный аппарат, способный зависать в воздухе, в частности, вертолет, обычно содержащий фюзеляж 2, главный несущий винт 3, установленный наверху фюзеляжа 2, с возможностью вращения вокруг оси А, и хвостовой винт 4, расположенный на одном конце фюзеляжа 2 и вращающийся вокруг собственной оси, перпендикулярно оси А.
Более детально несущий винт 3 содержит (фигура 2) пустотелую втулку 5 на оси А, несущую множество жестко закрепленных лопастей 9, которые вытянуты радиально относительно оси А.
Несущий винт 3 также содержит вал 6, с возможностью вращения вокруг оси А, под углом встроенный во втулку 5, и соединенный неуказанным способом с приводным элементом, например, турбиной, установленной на вертолете 1. В частности, вал 6 пустотелый.
Точнее, (фигура 3) вал 6 частично помещен внутрь втулки 5 и под углом встроен во втулку 5 с помощью шлицевого профиля и пары клиньев, радиально расположенных между валом 6 и втулкой 5. В частности, шлицевой профиль расположен на оси между вышеупомянутыми клиньями.
Главный несущий винт 3 также содержит потоковый конвейер 10, предназначенный для направления потока воздуха, создаваемого вращением несущего винта 3 по предварительно заданной траектории, имеющей специальную форму, чтобы ограничивать вибрации, создаваемые отделением вышеупомянутого потока от концов лопастей 9, расположенных на противоположном конце втулки 5.
Более детально потоковый конвейер 10 кольцевой, протянутый по оси А и расположенный на противоположной стороне втулки 5 относительно фюзеляжа 2.
Потоковый конвейер 10 имеет «шляпообразную» форму и ограничен парой поверхностей 11 и 12, обращенным по оси друг к другу; точнее, поверхность 11 по оси ограничивает потоковый конвейер 10 на противоположной к втулке 5 стороне, тогда как поверхность 12 ограничивает потоковый конвейер 10 на стороне, ближайшей к втулке 5.
Поверхность 11 непрерывная и тянется, продолжаясь в осевом направлении, начиная с оси А, с уменьшением по оси расстояния от втулки 5.
Поверхность 12 имеет первую скругленную наружную кромку 13 и вторую наружную кромку (не показана на фигуре 3), противоположную кромке 13 и расположенную в наиболее удаленном радиально положении от наружной кромки 13. Кроме того, вторая наружная кромка поверхности 12 смотрит по оси на наружную кромку поверхности 11.
Поверхности 11 и 12 имеют специальную форму, чтобы их осевое расстояние уменьшалось при продвижении в радиальном направлении, начиная с оси А.
Точнее, поверхность 12 при продвижении от кромки 13 ко второй кромке сначала удаляется от втулки 5, а затем перемещается ближе к втулке 5.
Поверхности 11 и 12 соединены друг с другом трубчатым изделием 14 в форме усеченного конуса, симметричным относительно оси А и имеющим боковую поверхность 8, растягивающуюся между поверхностями 11 и 12.
Несущий винт 3 также содержит устройство 15 для демпфирования вибраций.
В частности, устройство 15 пассивного типа и позволяет сдерживать передачу на вал 6 изгибных вибраций в плоскости, перпендикулярной оси А, и осевых вибраций по оси А, что будет разъяснено далее в настоящем документе.
Устройство 15 обычно содержит:
- массу 17, функционально связанную с втулкой 5, и вал 6 с возможностью противодействия передаче вибраций, создаваемых вращением лопастей 9; и
- упруго деформируемый шток 16.
Шток 16 опирается на вал 6 и соединен с массой 17, входящей по меньшей мере частично внутрь вала 6 и вытянутой параллельно оси А.
Точнее, жесткость штока 16 при изгибе в плоскости, перпендикулярной оси А, и размер массы 17 таковы, что при эксплуатации масса 17 вибрирует с предварительно заданной частотой, величина которой связана с характеристической пульсацией вибраций, создаваемых вращением несущего винта 3 в координатной системе навигации, встроенной в фюзеляж 2. Эта величина соответствует частоте повторения импульсов N*Ω, где Ω - это скорость вращения вала, а N - число лопастей несущего винта 3.
Другими словами, шток 16 и масса 17 образуют первый изгибающийся настраиваемый массовый демпфер, настроенный на частоту вибраций, создаваемых несущим винтом 3 и оказывающих такое усилие на вал 6, чтобы противодействовать передаче вышеупомянутых вибраций на вал 6, а следовательно, на вертолет 1.
Важно подчеркнуть, что шток 16 выполнен с возможностью обеспечения высокой осевой жесткости, чтобы он не вызывал какого-либо осевого перемещения массы 17.
Несущий винт 3 также содержит чашеобразную деталь 20 по оси А, под углом встроенную в вал 6 и шток 16 так, чтобы соединять вал 6 и шток 16 друг с другом.
Точнее, чашеобразная деталь 20 имеет трубкообразную форму, растянувшись симметрично по оси А, и находится радиально вне штока 16.
Чашеобразная деталь 20 содержит главный участок 22, окруженный валом 6 и вытянутый параллельно оси А, и кольцевую поверхность 21 головки, лежащую в плоскости, перпендикулярной оси А.
Главный участок 22 ограничивает на конце, противоположном поверхности 21 головки, посадочное место 23, занятое концом 18 оси штока 16.
Шток 16 проходит через поверхность 21 головки, которая прикреплена по оси с помощью нескольких винтов к резьбовой круглой гайке 29, соединенной с валом 6.
Поверхность 21 головки ограничивает конец оси чашеобразной детали 20, обращенной к потоковому конвейеру 10, тогда как посадочное место 23 расположено на конце оси чашеобразной детали 20, расположенной на противоположном конце от поверхности 21 головки.
Резьбовая соединительная тяга, перпендикулярная оси А, также проходит через посадочное место 23 и конец 18.
В предпочтительном варианте осуществления чашеобразная деталь 20 выполнена из легкого сплава.
Шток 16 содержит резьбовой конец 19, противоположный концу 18, на который навинчивается гайка 25.
И наконец, шток 16 содержит промежуточную секцию между концами 18 и 19, сужающуюся от конца 18 к концу 19 и проходящую через поверхность 21 головки.
Конец 18 штока 16 вставлен внутрь вала 6.
Кроме того, шток 16 полностью помещен внутрь цилиндра ограниченного удлинением вала 6 к потоковому конвейеру 10.
Масса 17 установлена внутри потокового конвейера 10. В частности, масса 17 установлена внутри отсека 24, радиально ограниченного поверхностью 8, аксиально открытого к втулке 5 и аксиально закрытого на противоположной стороне к втулке 5 участком поверхности 11, ограниченном поверхностью 8.
Устройство 15 содержит множество пружин 30 (фигуры с 2 по 5), функционально связанных с массой 17 и обладающих необходимой жесткостью вдоль оси А, чтобы сдерживать передачу осевых вибраций на вал 6.
Другими словами, массы 17 и пружины 30 образуют второй настраиваемый массовый демпфер, который колеблется вдоль оси А, уменьшая осевые вибрации вала 6.
В предпочтительном варианте осуществления частота настройки второго массового демпфера, образованного массой 17 и пружинами 30, равна частоте настройки первого массового демпфера, образованного штоком 16 и массой 17, и соответствует частоте повторения импульсов N*Ω.
Точнее говоря, пружины 30 установлены между штоком 16 и массой 17.
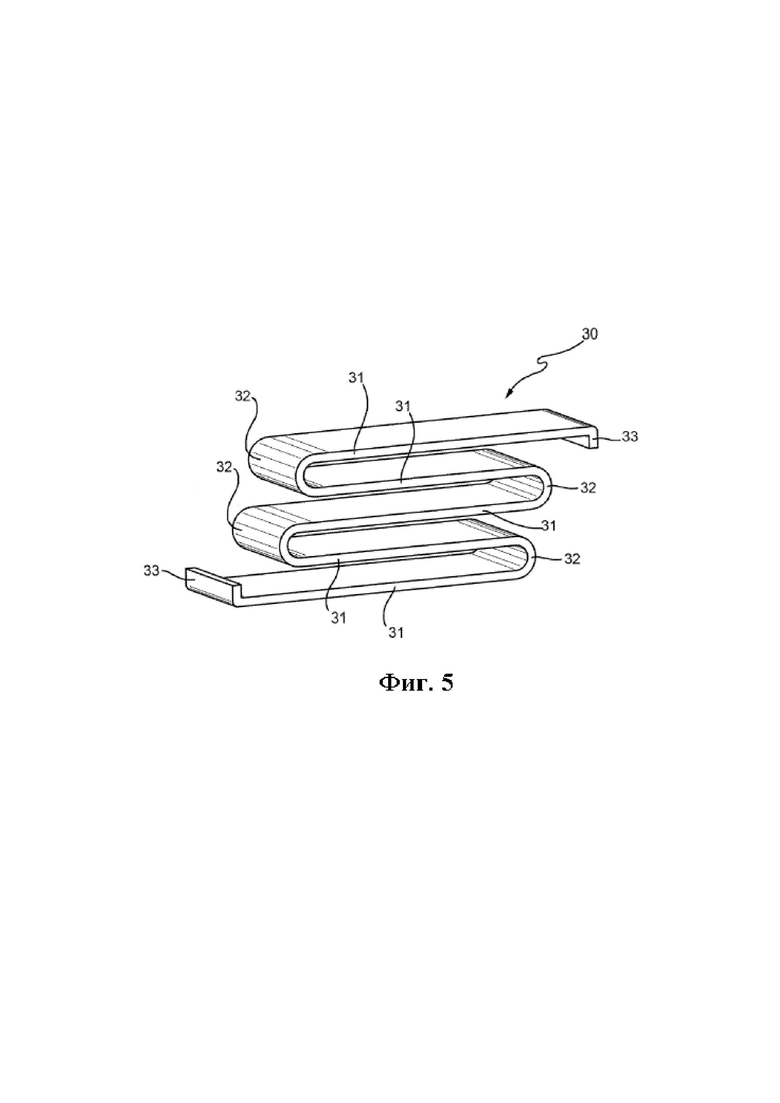
В частности, со ссылкой на фигуру 5, каждая пружина 30 предпочтительно имеет змеевидную форму.
В свою очередь, каждая пружина 30 содержит
- множество секций 31 преимущественно с радиальным растяжением; и
- множество секций 32 преимущественно с осевым растяжением, которые расположены между двумя взаимно последующими секциями 31.
В указанном случае секции 31 плоские, а секции 32 изогнуты таким образом, чтобы соединять две взаимно последующие секции 31.
Кроме того, пространство в радиальном направлении, занимаемое секциями 31, больше, чем пространство в осевом направлении, занимаемое секциями 32.
Более того, каждая пружина 30 прикреплена к массе 17 и штоку 16 на радиально свободных концах 33 соответствующих секций 31, ограничивая противоположные осевые концы пружины 30.
Форма и способ удержания пружин 30 таковы, что пружины могут считаться упруго деформируемыми по оси А и обладающими, по существу, бесконечно большой жесткостью в плоскости, перпендикулярной оси А, чтобы пружины 30 практически не вызывали никакой вибрации массы 17 в плоскости, перпендикулярной оси А.
Со ссылкой на фигуры 2 и 4 масса 17 имеет форму пустотелого цилиндра, внутрь которого вставлен осевой конец 19 штока 16 и пружины 30.
Точнее говоря, масса 17 вмещает первый и второй комплект 34 и 35 пружин 30.
Каждый комплект 34 и 35 образован множеством пружин 30, в показанном случае пятью, равноотстоящими друг от друга под углом вокруг оси А.
В частности, число пружин 30 каждого комплекта 34 и 35 соответствует числу лопастей 9 несущего винта 3.
Комплекты 34 и 35 наложены по оси друг на друга так, чтобы пружины 30 комплекта 34 были расположены в соответствии с соответствующими пружинами 30 комплекта 35.
Шток 16 также содержит втулку 40, расположенную на конце 19, к которой подсоединяются пружины 30.
Втулка 40 соединяет шток 16 и массу 17 с помощью пружин 30 способом упругой деформации в направлении, параллельном оси А.
В частности, со ссылкой на фигуру 3 втулка 40 содержит
- пару элементов 41 по оси противоположных друг другу, к которым крепятся радиально внутренние концы пружин 30 комплектов 34 и 35, соответственно; и
- элемент 42, который расположен по оси между элементами 41.
В частности, масса 17 выполнена из вольфрама.
В показанном случае втулка 40 имеет пятиугольную форму.
Масса 17 содержит основную деталь 26, ограничивающую посадочное место 25, и множество пластин 27 (не видны на фигуре 2), соединенных с возможностью отсоединения с основной деталью 26, чтобы обеспечивать регулировку частоты осевой вибрации массы 17, параллельной оси А, и, следовательно, частоты настройки устройства 15 в соответствии с частотой повторения импульсов N*Ω.
Пластины 27 сформированы кольцами, коаксиальными оси А, уложенными друг на друга и лежащими в соответствующих плоскостях, перпендикулярных оси А.
Аналогично шток 16 содержит множество пластин 45 (не видны на фигуре 2), соединенных с возможностью отсоединения с втулкой 40 и рядом с концом 19, чтобы выборочно изменять частоту изгибных вибраций массы 17 в плоскости, перпендикулярной оси А, а, следовательно, и частоту настройки устройства 15.
В процессе эксплуатации вал 6 приводит во вращательное движение втулку 5, лопасти 9 и устройство 15 вокруг оси А.
Вращение втулки 5 и лопастей 9 создает аэродинамические нагрузки на лопасти 9 и, как следствие, вибрации, которые передаются на вал 6.
Кроме того, вращение устройства 15 вызывает
- изгибное колебание массы 17 в плоскости, перпендикулярной оси A, в силу того, что шток 16 имеет изгибную упругую пластичность, при этом оставаясь, по существу, жестким в осевом направлении; и
- осевое колебание массы 17, параллельной оси A, в силу того, что пружины 30 обладают необходимой осевой жесткостью, при этом оставаясь, по существу, жесткими в плоскости, перпендикулярной оси A.
Другими словами, устройство 15 ведет себя фактически как узел, содержащий
- первый настраиваемый массовый демпфер, образованный штоком 16 и массой 17, и способный сдерживать передачу изгибных вибраций в плоскости, перпендикулярной оси A, на вал 6; и
- второй настраиваемый массовый демпфер, образованный пружинами 30 и массой 17, и способный сдерживать передачу осевых вибраций на вал 6.
Благодаря конструкции штока 16, массы 17 и пружин 30 частоты изгибной и осевой вибрации массы 17 таковы, что могут настраиваться на основную частоту вибраций, возникающих при вращении несущего винта 3, а именно N*Ω.
Таким образом, благодаря изгибным и упругим колебаниям массы 17, устройство 15 противодействует передаче вышеупомянутых осевых и изгибных вибраций на вал 6, и, с последнего, на фюзеляж 2.
Устройство 15 можно легко вставить внутрь уже существующего несущего винта 3, содержащего втулку 5, вал 6 и лопасти 9, чтобы модернизировать несущий винт 3.
С этой целью достаточно прикрепить чашеобразную деталь 20 к валу 6, прикрепить шток 16 к чашеобразной детали 20 и, наконец, прикрепить массу 17 и пружины 30 к штоку 16.
И наконец, можно окончательно отрегулировать частоту настройки устройства 15 после того, как устройство 15 будет установлено на борт вертолета 1, внутрь несущего винта 3.
В частности, сначала к массе 17 добавляются пластины 27, чтобы настроить устройство 15 на нужную частоту осевой вибрации вала 6, которую необходимо сдерживать, равную N*Ω.
Затем к втулке 40 добавляются пластины 45, чтобы настроить устройство 15 на нужную частоту изгибной вибрации вала 6, которую необходимо сдерживать, равную N*Ω.
Важно подчеркнуть, что пластины 45 регулируют частоту изгибной вибрации системы, образуемой штоком 16 и массой 17, но, практически, не изменяют частоту осевой вибрации системы, образуемой пружинами 30 и массой 17.
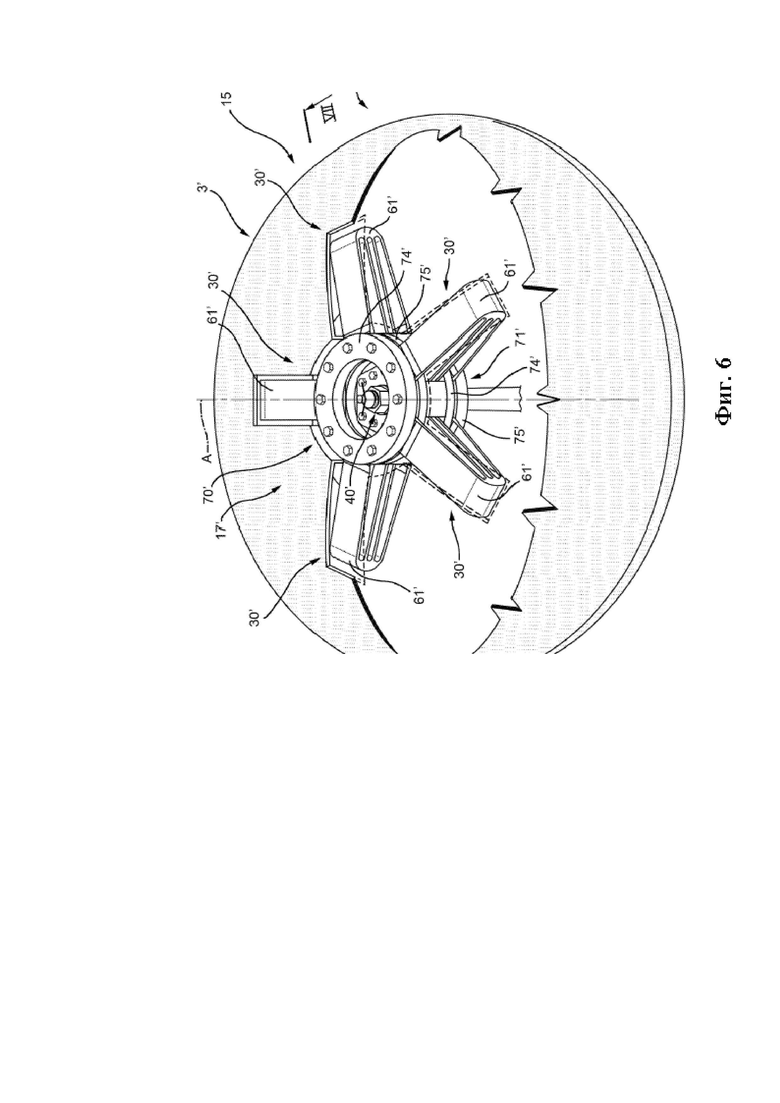
Ссылочная позиция 3’ на фигурах с 6 по 9 обозначает несущий винт согласно второму варианту осуществления настоящего изобретения; несущие винты 3, 3’ аналогичны друг другу, последующее описание ограничивается указанием на различия между ними и использует те же ссылки, где это возможно, для идентификации соответствующих деталей.
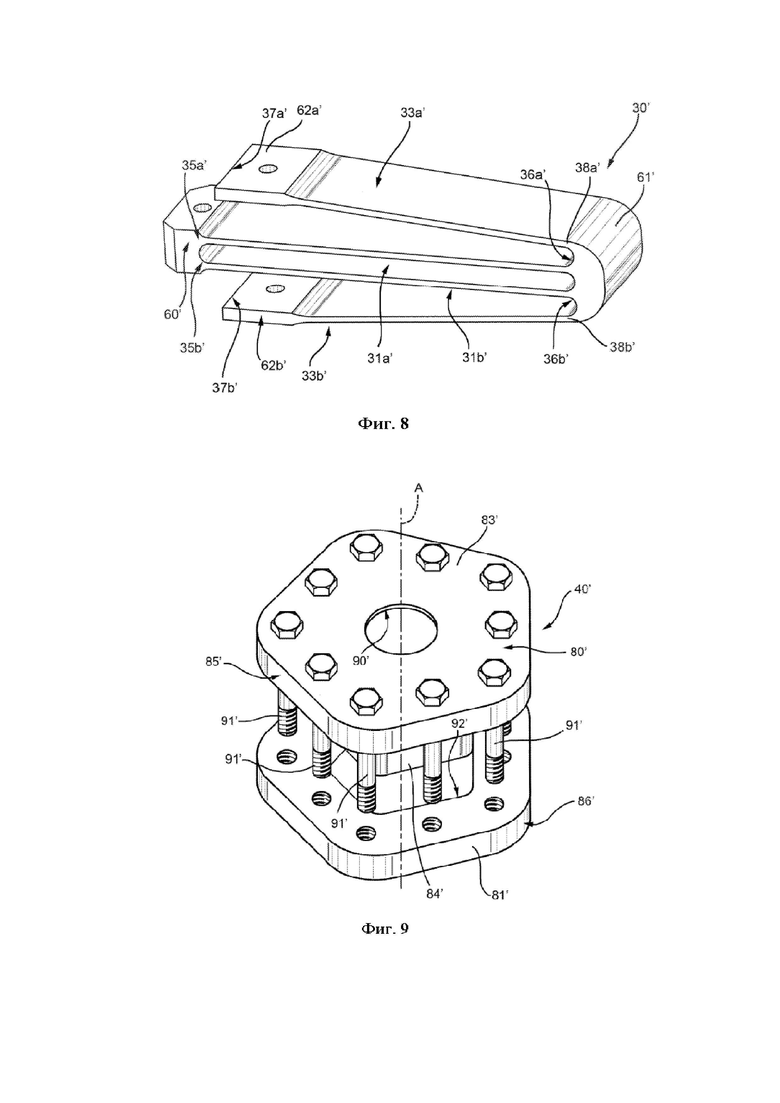
В частности, несущий винт 3’ отличается от несущего винта 3 тем, что пружина 30’ содержит (фигура 8):
- пару секций 31a’, 31b’ преимущественно с радиальным растяжением; и
- пару секций 33a’, 33b’.
В показанном варианте осуществления секции 33a’, 33b’ вытянуты под наклоном относительно оси A.
Секции 31a’, 31b’ расположены по оси между секциями 33a’, 33b’.
Секции 31a’, 31b’ содержат соответствующие радиально внутренние концы 35a’, 35b’ и радиально наружные концы 36a’, 36b’.
Секции 33a’, 33b’ содержат соответствующие радиально внутренние концы 37a’, 37b’ и радиально наружные концы 38a’, 38b’.
Каждая пружина 30’ дополнительно содержит
- радиально внутренний блок 60’ к которому присоединены концы 35a’, 35b’ секций 31a’, 31b’; и
- радиально наружный блок 61’ к которому присоединены концы 38a’, 38b’ секций 32a’, 32b’.
Секции 33a’, 33b’ содержат соответствующие пластины 62a’, 62b’, лежащие в плоскости, практически, перпендикулярной оси А, и ограничивающие соответствующие концы 37a’, 37b’.
Секции 33a’, 33b’ в показанном варианте осуществления сходятся друг к другу, выходя из соответствующей пластины 62a’, 62b’ к блоку 61’.
В показанном варианте осуществления секции 31a’, 31b’; 33a’, 33b’ ограничены соответствующими рычагами.
В показанном варианте осуществления секции 31a’, 33a’ расположены над соответствующими секциями 33a’, 33b’.
Каждая пружина 30’ предпочтительно имеет змеевидную форму, выходя из пластины 62a’ в пластину 62b’ около секции 33a’, части блока 61’ к которым присоединяется конец 38a’, секция 31a’, блок 60’, секция 31b’, часть блока 61’ к которым присоединяется конец 38b’ и секция 33b’.
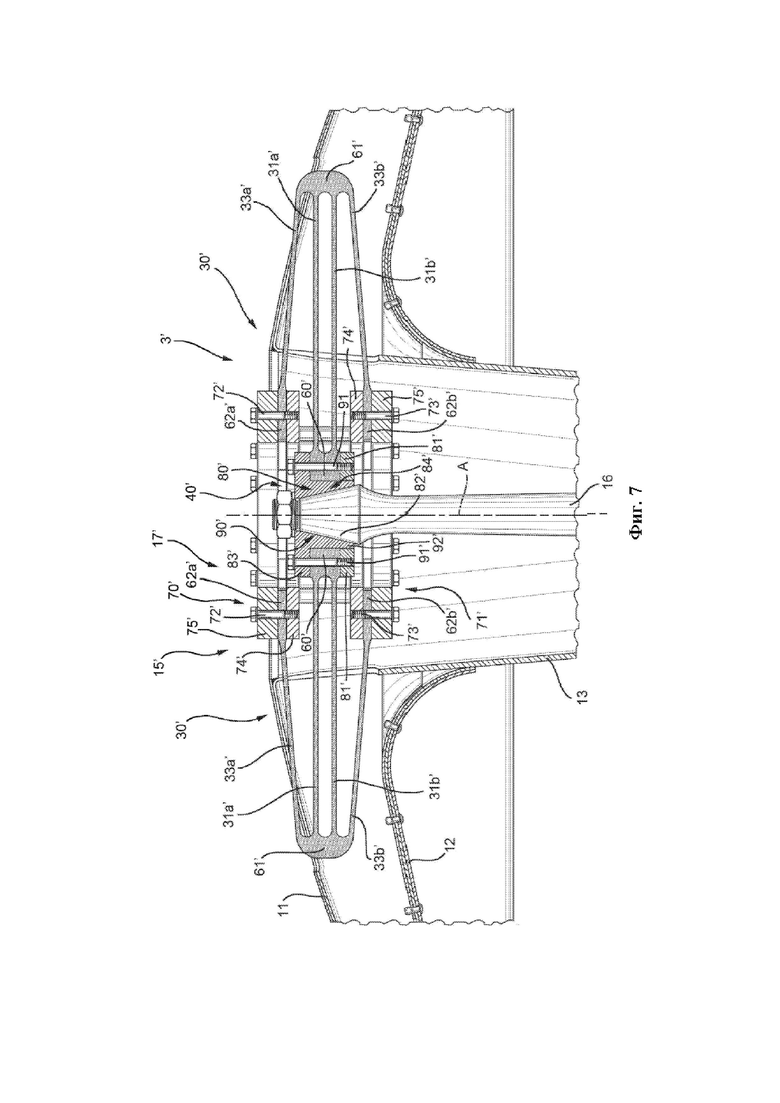
Со ссылкой на фигуру 7, масса 17’ отличается от массы 17 тем, что содержит
- кольцо 70’ к которому присоединяются пластины 62a’ секций 33a’ посредством болтов 72’ в показанном варианте осуществления; и
- кольцо 71’ к которому присоединяются пластины 62b’ секций 33b’ посредством болтов 73’ в показанном варианте осуществления.
В частности, каждое кольцо 70’, 71’ образовано двумя соответствующими подкольцами 74’, 75’, которые соединены болтами 72’, 73’ соответственно.
Подкольца 74’ расположены по оси между подкольцами 75’.
Пластины 62a’, 62b’ соответствующих секций 33a’, 33b’ расположены между подкольцами 74’, 75’ колец 70’, 71’ соответственно.
Со ссылкой на фигуру 9, втулка 40’ отличается от втулки 40 тем, что содержит
- пустотелый элемент 80’, ограничивающий конусную контактную поверхность 90’, вмещая конец 82’ штока 16; и
- пустотелый фланец 81’ соединен с элементом 80’ с возможностью вращения.
Элемент 80’ содержит фланец 83’, лежащий в плоскости, перпендикулярной оси A, и пустотелую деталь 84’, растягивающуюся параллельно оси A от элемента 80’ к фланцу 81’.
Фланец 81’ лежит в плоскости, перпендикулярной оси A, и отстоит по оси от фланца 83’ параллельно оси A.
В показанном варианте осуществления элемент 80’ и фланец 83’ имеют многоугольный радиально внешний контур 85’ относительно оси A, пятиугольный в показанном варианте осуществления.
Контур 85’ фланца 83’ входит в зацепление с пятиугольным сквозным посадочным местом 92’, ограниченным радиально внешним контуром фланца 81’. Таким образом, элемент 80’ и фланец 81’ образуют единое целое с возможностью вращения благодаря соединению по форме.
Посадочное место 90’ имеет форму усеченного конуса, сужающегося от фланца 81’ к фланцу 83’.
Фланец 81’ имеет многоугольный радиально внешний контур 86’ относительно оси A, пятиугольный в показанном варианте осуществления.
Фланец 83’ лежит в плоскости, перпендикулярной оси A, и окружает деталь 84’.
Как показано на фигуре 7, блок 60’ каждой пружины 30’ расположен по оси между фланцами 81’, 83’ втулки 40’.
Фланцы 81’, 83’ соединены друг с другом с возможностью отсоединения с помощью нескольких болтов 91’, растягиваясь параллельно оси A.
Со ссылкой на фигуру 6 пружины 30’, втулка 40’ и масса 17’ помещены в потоковый контейнер 10.
Работа несущего винта 3’ и регулировка частоты настройки устройства 15’ практически идентичны работе несущего винта 3 и регулировке частоты настройки устройства 15 и поэтому не рассматриваются подробно.
Исходя из изучения несущего винта 3, 3’ и способа согласно настоящему изобретению, очевидны преимущества, которые можно получить с помощью этого изобретения.
В частности, устройство 15, 15’ содержит пружины 30, 30’, которые обладают необходимой жесткостью по оси А и соединены с массой 17, 17’.
Таким образом, масса 17, 17’ может упруго колебаться параллельно оси А, благодаря чему сдерживая передачу осевых вибраций, параллельных оси А, на вал 6.
Кроме того, масса 17, 17’ также может колебаться в плоскости, перпендикулярной оси А, и упруго соединяться со штоком 16, обеспечивая нужное значение осевой жесткости.
Таким образом, устройство 15, 15’ использует одну и ту же массу 17, 17’ в качестве «перемещаемого элемента» для сдерживания передачи как изгибных, так и осевых вибраций на вал 6.
Другими словами, одна и та же масса 17, 17’ является частью как первого настраиваемого массового демпфера вместе со штоком 16, так и частью второго настраиваемого массового демпфера вместе с пружинами 30, 30’.
Более того, устройство 15, 15’ использует один и тот же шток 16 для присоединения как изгибающегося настраиваемого массового демпфера, сформированного массой 17, 17’ и штоком 16, так и осевого настраиваемого массового демпфера, сформированного массой 17, 17’ и пружинами 30, 30’, к валу 6.
Из этого следует, что устройство 15, 15’ очень компактно и занимает мало места, что позволяет встраивать его в несущий винт 3 без излишнего изменения конструкции последнего.
Заявитель также отмечает, что благодаря змеевидной конфигурации пружины 30, 30’ обладают постоянной жесткостью и поэтому практически линейной упругой реакцией.
В частности, пружины 30’ благодаря наличию блоков 60’, 61’ обладают оптимальной жесткостью в плоскости, перпендикулярной оси A, оптимальной растягиваемостью параллельно оси A, и способны эффективно выдерживать усталостные нагрузки, вызванные работой несущего винта 3, 3’.
Кроме того, поскольку устройство 15, 15’ установлено внутри отсека 24, оно не подвергается воздействию аэродинамических сил, которые могли бы препятствовать настройке устройства 15, 15’ на вышеупомянутую частоту, характерную для вибраций, создаваемых несущим винтом 3, 3’.
И наконец, устройство 15, 15’ легко монтируется в несущий винт 3, 3’, т. к. оно размещается в отсеке 24, а следовательно, не препятствует работе других компонентов несущего винта 3, 3’.
Способ модернизации по изобретению особенно предпочтителен, поскольку он не требует внесения каких-либо изменений в конструкцию уже существующего несущего винта 3, 3’ для создания новых отсеков для устройства 15, 15’.
Фактически, для этой цели достаточно прикрепить чашеобразную деталь 20 к валу 6, прикрепить шток 16 к чашеобразной детали 20 и прикрепить пружины 30, 30’ к штоку 16, а массу 17, 17’ к пружинам 30, 30’.
И наконец, частоту настройки устройства 15, 15’ можно легко настроить после того, как устройство 15 будет установлено на несущем винте 3, 3’ таким образом, чтобы учесть эффективное значение скорости вращения Ω вала 6.
Для этой цели достаточно сначала добавить множество пластин 27 к массе 17, 17', чтобы настроить устройство 15, 15’ на нужную частоту осевой вибрации вала 6, а затем добавить множество пластин 45 к втулке 40, 40’ чтобы настроить устройство 15, 15’ на нужную частоту изгибной вибрации вала 6, которую нужно сдержать.
И наконец, очевидно, что можно выполнять модификации и вносить изменения в конструкцию несущего винта 3, 3’, и способ, описанный в настоящем документе, в пределах объема охраны, определяемого формулой изобретения.
Секции 33a’, 33b’ могут радиально увеличиваться относительно оси A.
Вертолет 1 также может быть конвертопланом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТ ДЛЯ СПОСОБНОГО К ЗАВИСАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2757548C2 |
| ВИНТ ПРИСПОСОБЛЕННОГО К ЗАВИСАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА, СОДЕРЖАЩИЙ УСТРОЙСТВО ДЕМПФИРОВАНИЯ ВИБРАЦИИ | 2014 |
|
RU2652491C2 |
| ВИНТ ДЛЯ СПОСОБНОГО К ЗАВИСАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2799170C1 |
| ВИНТ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА, СПОСОБНОГО К ЗАВИСАНИЮ | 2017 |
|
RU2733306C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ, СПОСОБНЫЙ К ЗАВИСАНИЮ | 2017 |
|
RU2733299C1 |
| ВИНТ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА, СПОСОБНОГО К ЗАВИСАНИЮ, И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2017 |
|
RU2733456C1 |
| НЕСУЩИЙ ВИНТ | 2006 |
|
RU2338665C2 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| НЕСУЩИЙ ВИНТ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2523723C1 |
| ДЕМПФИРУЮЩИЙ УЗЕЛ НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2117604C1 |
Изобретение относится к области авиации, в частности к конструкциям несущих винтов. Несущий винт (3) для летательного аппарата, способного зависать в воздухе, содержит втулку (5) с возможностью вращения вокруг оси (A) с множеством лопастей (9), вал (6) с возможностью соединения с приводным элементом летательного аппарата (1) и функционально связанный с втулкой (5) для приведения втулки (5) во вращательное движение вокруг оси (A) и демпфирующее средство (15’) для уменьшения передачи вибраций на вал (6). Демпфирующее средство содержит массу (17), предназначенную для колебания в плоскости, перпендикулярной оси (A), чтобы сдерживать изгибные вибрации вала (6), создаваемые вращением лопастей (9). Демпфирующее средство (15) также содержит упругие средства (30), обладающие необходимой жесткостью вдоль оси (A) и функционально связанные с массой (17’), чтобы сдерживать вибрацию вала (6) вдоль оси (A). Обеспечивается дополнительное регулирование частоты настройки демпфирующих устройств на фактическую частоту повторения импульсов вибраций, передаваемых на вал. 5 н. и 22 з.п. ф-лы, 9 ил.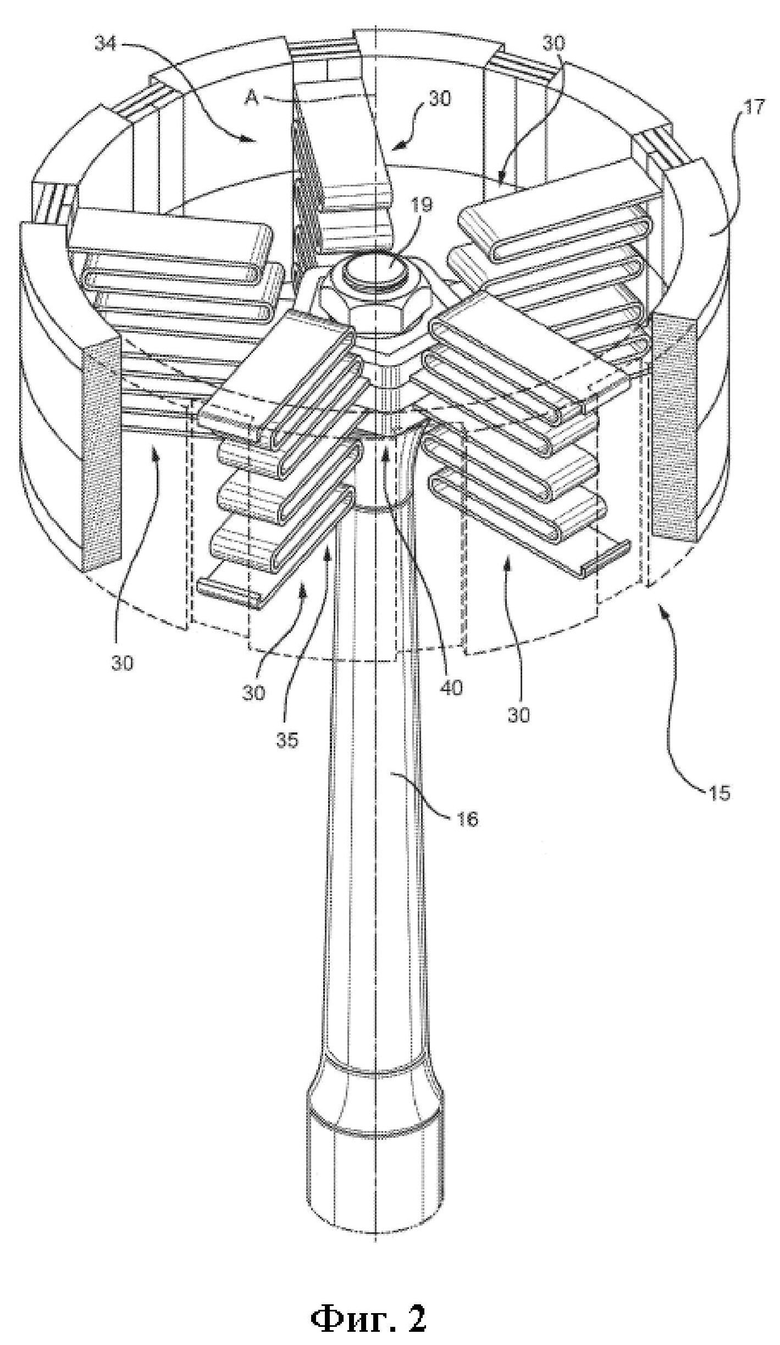
1. Несущий винт (3, 3’) для летательного аппарата (1), способного зависать в воздухе, содержащий
втулку (5), выполненную с возможностью вращения вокруг первой оси (A) и содержащую группу лопастей (9);
вал (6), выполненный с возможностью соединения с приводным элементом летательного аппарата (1) и функционально связанный с втулкой (5) для приведения втулки (5) во вращательное движение вокруг оси (A); и
демпфирующее средство (15, 15’) для уменьшения передачи вибраций на вал (6), которое содержит массу (17, 17’), предназначенную для колебания во время эксплуатации в плоскости, перпендикулярной оси (A) для сдерживания во время эксплуатации изгибных вибраций вала (6), создаваемых вращением лопастей (9);
демпфирующее средство (15, 15’) дополнительно содержит упругие средства (30, 30’), имеющие определенную жесткостью вдоль оси (A) и функционально связанные с массой (17, 17’) для сдерживания во время эксплуатации вибрации вала (6) вдоль оси (A);
демпфирующее средство (15, 15’) дополнительно содержит первый упругий элемент (16), опирающийся на вал (6) и предназначенный для изгибных колебаний в плоскости, перпендикулярной оси (A);
первый упругий элемент (16) растягивается вдоль оси (A);
упругие средства (30, 30’) расположены между массой (17, 17’) и первым упругим элементом (16);
отличающийся тем, что упругие средства (30, 30’) содержат по меньшей мере второй упругий элемент (30, 30’) змеевидной формы, имеющий группу первых секций (31; 31a’, 31b’, 33a’, 33b’), растягивающихся радиально относительно оси (A), чередуясь с группой вторых секций (32; 60’, 61’), растягивающихся параллельно оси (A).
2. Несущий винт по п. 1, отличающийся тем, что радиальное растяжение каждой первой секции (31; 31a’, 31b’, 33a’, 33b’) больше, чем осевое растяжение каждой второй секции (32; 60’, 61’).
3. Несущий винт по любому из пп. 1 или 2, отличающийся тем, что упругие средства (30, 30’) содержат первую группу (34) вторых упругих элементов (30), равноотстоящих друг от друга под углом относительно оси (A).
4. Несущий винт по п. 3, отличающийся тем, что упругие средства (30) содержат вторую группу (35) вторых упругих элементов (30), равноотстоящих друг от друга под углом относительно оси (A); каждый второй упругий элемент (30) первой группы (34) накладывается по оси на соответствующий второй упругий элемент (30) второй группы (35).
5. Несущий винт по любому из вышеуказанных пунктов, отличающийся тем, что второй упругий элемент (30) содержит пару вторых осевых концевых секций (33) на свободных концах, противоположных друг другу, при этом одна крепится к массе (17), а вторая крепится к первому упругому элементу (16).
6. Несущий винт по любому из пп. 3-5, отличающийся тем, что он содержит дополнительную втулку (40, 40’), под углом встроенную в первый упругий элемент (16), установленную на осевом конце упругого элемента (16), и на которую крепятся вторые упругие элементы (30, 30’).
7. Несущий винт по любому из предшествующих пунктов, отличающийся тем, что масса (17) пустотелая, и что упругие средства (30) помещены внутрь массы (17).
8. Несущий винт по любому из вышеуказанных пунктов, отличающийся тем, что масса (17, 17’) и упругие средства (30) формируют первый настраиваемый массовый демпфер, имеющий первую собственную частоту, и что масса (17, 17’) и первый упругий элемент (16) формируют второй настраиваемый массовый демпфер, имеющий вторую собственную частоту, равную первой собственной частоте.
9. Несущий винт по любому из пп. 1-3, 6-8, отличающийся тем, что каждый второй упругий элемент (30a’, 30b’) содержит по меньшей мере один первый рычаг (31a’, 31b’), установленный на первом упругом элементе (16); и пару вторых рычагов (33a’, 33b’), установленных на массу (17’); первый рычаг (31a’, 31b’) расположен по оси между вторыми рычагами (33a’, 33b’).
10. Несущий винт по п. 9, отличающийся тем, что по меньшей мере один второй упругий элемент (30a’, 30b’) содержит радиально наружный конечный блок (61’), к которому присоединяются первый рычаг (31a’, 31b’) и вторые рычаги (33a’, 33b’).
11. Несущий винт по п. 9 или 10, в зависимости от п. 6, отличающийся тем, что содержит дополнительную втулку (40’), расположенную между первым упругим элементом (16) и по меньшей мере одним вторым упругим элементом (30a’, 30b’); второй упругий элемент (30a’, 30b’) содержит радиально внутренний конечный блок (60’), на котором установлен по меньшей мере один второй рычаг (33a’, 33b’); радиально внутренний конечный блок (60’) соединен с дополнительной втулкой (40’); радиально внутренний конечный блок (61’) соединен с первым упругим элементом (16).
12. Несущий винт по п. 10 или 11, отличающийся тем, что масса (17’) содержит первое кольцо (70’) и второе кольцо (71’), отстоящие по оси относительно друг друга, и к которым крепятся соответствующие вторые рычаги (33a’, 33b’).
13. Несущий винт по п. 12, отличающийся тем, что первое кольцо (70’) содержит пару первых подколец (74’, 75’), между которыми по оси расположен первый радиально внутренний конец (37a’) одного (33a’) из вторых рычагов (33a’, 33b’); второе кольцо (71’), содержащее пару вторых подколец (74’, 75’), между которыми второй радиально внутренний конец (37b’) другого (33b’) из вторых рычагов (33a’, 33b’) расположен в осевом направлении.
14. Несущий винт по любому из пп. 11-13, отличающийся тем, что дополнительная втулка (40’) содержит первый фланец (83’) и второй фланец (81’), отстоящие по оси относительно друг друга, и между которыми расположен радиально внутренний конечный блок (60’) по меньшей мере одного первого рычага (31a’, 31b’).
15. Несущий винт по п. 14, отличающийся тем, что дополнительная втулка (40’) содержит деталь (94’), по оси выступающую из первого фланца (83’) на стороне второго фланца, (81’), и входит в зацепление внутри первого посадочного места (92’), ограниченного вторым фланцем (81’).
16. Несущий винт по п. 15, отличающийся тем, что первый фланец (83’) и деталь (84’) ограничивают второе посадочное место (90’), занимаемое первым упругим элементом (16).
17. Несущий винт по п. 16, отличающийся тем, что второе посадочное место (90’) имеет конусную форму и/или первое посадочное место (92’) имеет многоугольную форму.
18. Несущий винт по п. 16 или 17, отличающийся тем, что деталь (84’) имеет многоугольный радиально внешний контур (85’), входящий в зацепление с первым посадочным местом (92’), ограниченным вторым фланцем (81’); первое посадочное место (92’) имеет радиально внутренний многоугольный контур.
19. Несущий винт по п. 18, отличающийся тем, что второе упругое средство (30’) преимущественно растягивается на радиально наружной стороне массы (17’).
20. Несущий винт по любому из пп. 9-19, отличающийся тем, что первый рычаг (31a’, 31b’) радиально растягивается относительно оси (A); и/или отличающийся тем, что по меньшей мере один второй рычаг (33a’, 33b’) по меньшей мере частично наклонен относительно оси (A).
21. Несущий винт по любому из вышеуказанных пунктов, отличающийся тем, что содержит потоковый конвейер (10), вмещающий демпфирующие средства (15).
22. Летательный аппарат (1), способный зависать в воздухе, отличающийся тем, что содержит несущий винт (3) по любому из предшествующих пунктов.
23. Несущий винт (3’) для летательного аппарата (1), способного зависать в воздухе, содержащий
втулку (5), выполненную с возможностью вращения вокруг первой оси (A) и содержащую группу лопастей (9);
вал (6), выполненный с возможностью соединения с приводным элементом летательного аппарата (1) и функционально связанный с втулкой (5) для приведения втулки (5) во вращательное движение вокруг оси (A); и
демпфирующее средство (15’) для уменьшения передачи вибраций на вал (6), которое содержит массу (17’), предназначенную для колебания во время эксплуатации в плоскости, перпендикулярной оси (A) для сдерживания во время эксплуатации изгибных вибраций вала (6), создаваемых вращением лопастей (9);
демпфирующее средство (15’) дополнительно содержит упругие средства (30’), обладающие необходимой жесткостью вдоль оси (A) и функционально связанные с массой (17’) для сдерживания во время эксплуатации вибраций вала (6) вдоль оси (A), при этом вибрации создаются вращением лопастей;
демпфирующее средство (15’) дополнительно содержит первый упругий элемент (16), опирающийся на вал (6) и предназначенный для изгибных колебаний в плоскости, перпендикулярной оси (A);
первый упругий элемент (16) растягивается вдоль оси (A);
упругие средства (30’) расположены между массой (17’) и первым упругим элементом (16);
отличающийся тем, что упругие средства (30’) содержат по меньшей мере один второй упругий элемент (30’);
второй упругий элемент (30’) содержит:
по меньшей мере один первый рычаг (31a’, 31b’), установленный на первом упругом элементе (16); и
пару вторых рычагов (33a’, 33b’), установленных на массу (17’);
радиально наружный конечный блок (61’), присоединенный к первому элементу (16), и к которому присоединяются первый рычаг (31a’, 31b’) и вторые рычаги (33a’, 33b’); и
радиально наружный конечный блок (61’), к которому присоединяются первый рычаг (31a’, 31b’) и вторые рычаги (33a’, 33b’);
радиально внутренний конечный блок (61’) соединен с первым упругим элементом (16).
24. Способ сдерживания вибраций, передаваемых на вал (6) несущего винта (3) летательного аппарата (1); при этом ротор (3) содержит втулку (5), выполненную с возможностью вращения вокруг оси (A) и содержащую группу лопастей (9);
вал (6), выполненный с возможностью соединения с приводным элементом летательного аппарата (1) и функционально связанный с втулкой (5) для приведения втулки (5) во вращательное движение вокруг оси (A); при этом способ содержит следующий этап
i) подсоединяют первую массу (17, 17’) к валу (6) так, чтобы она свободно колебалась в плоскости, перпендикулярной оси (A) для сдерживания изгибных вибраций вала (6);
отличающийся тем, что он содержит следующие этапы
ii) подсоединяют упругие средства (30, 30’), имеющие определенную жесткость, вдоль оси (A) к массе (17, 17’) для сдерживания вибраций вала (6) вдоль оси (A);
iii) подсоединяют первый упругий элемент (16), предназначенный для колебания в плоскости, перпендикулярной оси (A), и опирающийся на вал (6), к массе (17, 17’); и
iv) подсоединяют первую массу (17, 17’) к первому упругому элементу (16);
упругие средства (30, 30’) содержат по меньшей мере второй упругий элемент (30) змеевидной формы, имеющий группу первых секций (31), растягивающихся радиально относительно оси (A), чередуясь с группой вторых секций (32), растягивающихся параллельно оси (A).
25. Способ по п. 24, отличающийся тем, что он содержит следующие этапы
v) выборочно добавляют дополнительные вторые массы (27) к первой массе (17) для настройки частоты вибраций первой массы (17) параллельно оси (A) на нужную величину; и
vi) выборочно добавляют дополнительные третьи массы (45) к первому упругому элементу (16) для настройки частоты вибраций первой массы (17, 17’) перпендикулярно оси (A) на определенную величину.
26. Способ по п. 25, отличающийся тем, что этап v) выполняется перед этапом vi).
27. Способ сдерживания вибраций, передаваемых на вал (6) несущего винта (3) летательного аппарата (1); при этом
ротор (3) содержит втулку (5), выполненную с возможностью вращения вокруг оси (A) и, в свою очередь, содержащую группу лопастей (9);
вал (6) выполнен с возможностью соединения с приводным элементом летательного аппарата (1) и функционально связан с втулкой (5) для приведения втулки (5) во вращательное движение вокруг оси (A); при этом способ содержит следующий этап
i) подсоединяют первую массу (17, 17’) к валу (6) так, чтобы она свободно колебалась в плоскости, перпендикулярной оси (A) для сдерживания изгибных вибраций вала (6);
отличающийся тем, что он содержит следующие этапы
ii) подсоединяют упругие средства (30’), имеющие определенную жесткость, вдоль оси (A) к массе (17, 17’) для сдерживания вибраций вала (6) вдоль оси (A);
iii) подсоединяют первый упругий элемент (16), предназначенный для колебания в плоскости, перпендикулярной оси (A), и опирающийся на вал (6), к массе (17, 17’); и
iv) подсоединяют первую массу (17, 17’) к первому упругому элементу (16);
упругие средства (30’) содержат по меньшей мере один второй упругий элемент (30’);
второй упругий элемент (30’) содержит
по меньшей мере один первый рычаг (31a’, 31b’), установленный на первом упругом элементе (16); и
пару вторых рычагов (33a’, 33b’), установленных на массу (17’);
радиально наружный конечный блок (61’), присоединенный к первому элементу (16), и к которому присоединяются первый рычаг (31a’, 31b’) и вторые рычаги (33a’, 33b’); и
радиально наружный конечный блок (61’), к которому присоединяются первый рычаг (31a’, 31b’) и вторые рычаги (33a’, 33b’);
радиально внутренний конечный блок (61’) соединен с первым упругим элементом (16).
| US 20110268573 A1, 03.11.2011 | |||
| US 20100296930 A1, 25.11.2010 | |||
| US 5647726 A, 15.07.1997 | |||
| US 20100296931 A1, 25.11.2010 | |||
| WO 2017145073 A1, 31.08.2017 | |||
| ДЕМПФЕР ВИБРАЦИЙ, ПРЕДНАЗНАЧЕННЫЙ, В ЧАСТНОСТИ, ДЛЯ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2001 |
|
RU2256588C2 |

