ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая патентная заявка заявляет о приоритете по европейской патентной заявке №18186074.3, поданной 27.07.2018, раскрытие которой включено в качестве ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к комплекту для вертолета.
УРОВЕНЬ ТЕХНИКИ
Известно, что вертолеты в основном содержат фюзеляж, основной винт, расположенный на верхней части фюзеляжа и вращающийся вокруг своей оси, и хвостовой винт, расположенный на конце фюзеляжа.
Более подробно, винт, в свою очередь, в основном содержит:
- опорный корпус;
- втулку, вращающуюся вокруг упомянутой оси и снабженную множеством лопастей, радиально прикрепленных к упомянутой втулке и выступающих из нее; и
- вал, который может соединяться с приводным элементом и функционально соединяться со втулкой, чтобы приводить ее во вращение.
Фюзеляж обычно соединяется с винтом множеством соединительных тяг и пластиной парирования крутящего момента. Другими словами, фюзеляж «подвешен» на опорном корпусе.
В процессе эксплуатации работа винта вызывает создание высокочастотных и низкочастотных вибраций. Более конкретно, низкочастотные вибрации создаются спутной струей, отделяющейся от лопастей и от центра втулки. Это отделение происходит в центре втулки и влияет на вертикальные и горизонтальные аэродинамические поверхности хвоста и хвостовой винт.
В процессе эксплуатации вращение лопастей при высоких угловых скоростях приводит к возникновению высокочастотных вибраций, которые передаются на вал и, вследствие этого, на фюзеляж, создавая дискомфорт для находящихся внутри фюзеляжа.
В отрасли известно, что вибрационные нагрузки, действующие на винт, имеют импульсы, равные N*Ω и кратным им значениям в единой системе отсчета с фюзеляжем, где Ω - скорость вращения вала, а N - число лопастей винта.
Другими словами, втулка и вал передают импульсы вибрационной аэродинамической нагрузки, действующие в плоскости лопастей, на вышеупомянутые импульсы.
Исходя из вышеизложенного, в отрасли явно ощущается необходимость ограничения передачи от вала к фюзеляжу вибраций с вышеупомянутыми значениями импульсов, равными N*Ω и их кратным значениями.
Для этой цели используются известные пассивные и активные демпфирующие устройства.
Пассивные демпфирующие устройства в основном содержат массы, упруго подвешенные от вала или втулки на пружинах. Вибрация этих подвешенных масс позволяет по меньшей мере частично поглощать вибрации на валу и втулке.
Вышеупомянутые демпфирующие устройства преобразуют вибрационную энергию в кинетическую энергию вышеупомянутых масс при их движении на упругой опоре и создают демпфирующую силу, пропорциональную упругости пружины и смещению масс.
Альтернативно, активные демпфирующие устройства в основном представляют собой исполнительные механизмы, которые прикладывают к втулке или валу синусоидальную демпфирующую силу, которая противодействует силе, создаваемой вибрациями.
Пассивные демпфирующие устройства требуют использования сочетаний масс и пружин в стандартных компоновках и имеют минимальные габаритные размеры, которые ограничивают гибкость использования.
Активные демпфирующие устройства дороги и сложны в изготовлении.
Еще одно недавно разработанное решение представлено так называемыми «инерционными» устройствами.
Эти устройства, известные как «инерторы», располагаются между первой точкой источника вибрации и второй точкой конструкции, которую необходимо изолировать от вибраций, и оказывают на них силу, пропорциональную разности ускорения между первой и второй точками, измеренными вдоль линии, соединяющей первую и вторую точки.
Посредством соответствующей калибровки инерции перемещающихся и вращающихся масс инертора можно позволить этой силе уменьшать или подавлять передачу вибраций с заданной частотой от источника вибраций к изолируемой конструкции.
Один из первых примеров этих устройств инерционного типа описан в EP-B-1402327 и в основном содержит:
- тягу, соединенную с первой точкой;
- корпус, соединенный со второй точкой и относительно которого тяга может скользить; и
- маховик, соединенный с тягой и вращающийся внутри корпуса в результате скольжения тяги из-за колебаний в первой точке.
В US-A-2009/0108510 описывается еще одно демпфирующее устройство инерционного типа.
Типичное воплощение инерционного устройства обеспечивает преобразование колебательного линейного движения в переменное вращательное движение маховика с моментом инерции.
Таким образом, использование демпфирующих устройств инерционного типа может вызывать создание крутящего момента из-за угловых ускорений, которым подвергается маховик с инерцией вращения; в свою очередь, вышеупомянутый крутящий момент может вызывать нежелательные вибрации. В частности, в случае инертора, применяемого для изоляции вибраций вдоль тяги и имеющего маховик, ось которого совпадает с осью тяги, действие этого крутящего момента направлено к оси удлинения тяги.
Существует необходимость создания демпфирующего устройства инерционного типа, которое легко встраивается в вертолеты известного типа без изменения аэродинамической конфигурации вертолета.
В отрасли также существует необходимость создания демпфирующего устройства инерционного типа, которое максимально снижает передачу вышеупомянутого крутящего момента на фюзеляж, для повышения комфорта пассажиров вертолета, особенно в отношении вертолетов, предназначенных для VIP-сегмента.
Также в отрасли существует необходимость снижения риска повреждения демпфирующего устройства инерционного типа, которое может быть вызвано наличием вышеупомянутого момента инерции.
Наконец, в отрасли существует необходимость максимального увеличения срока службы демпфирующего устройства инерционного типа.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание комплекта для вертолета, который позволит удовлетворить по меньшей мере одну из вышеупомянутых потребностей простым и недорогим способом.
Вышеупомянутая задача реализуется посредством настоящего изобретения, поскольку оно относится к комплекту для вертолета по п.1.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания настоящего изобретения ниже приведены два предпочтительных варианта осуществления исключительно в качестве неограничивающего примера и со ссылкой на прилагаемые чертежи, в которых:
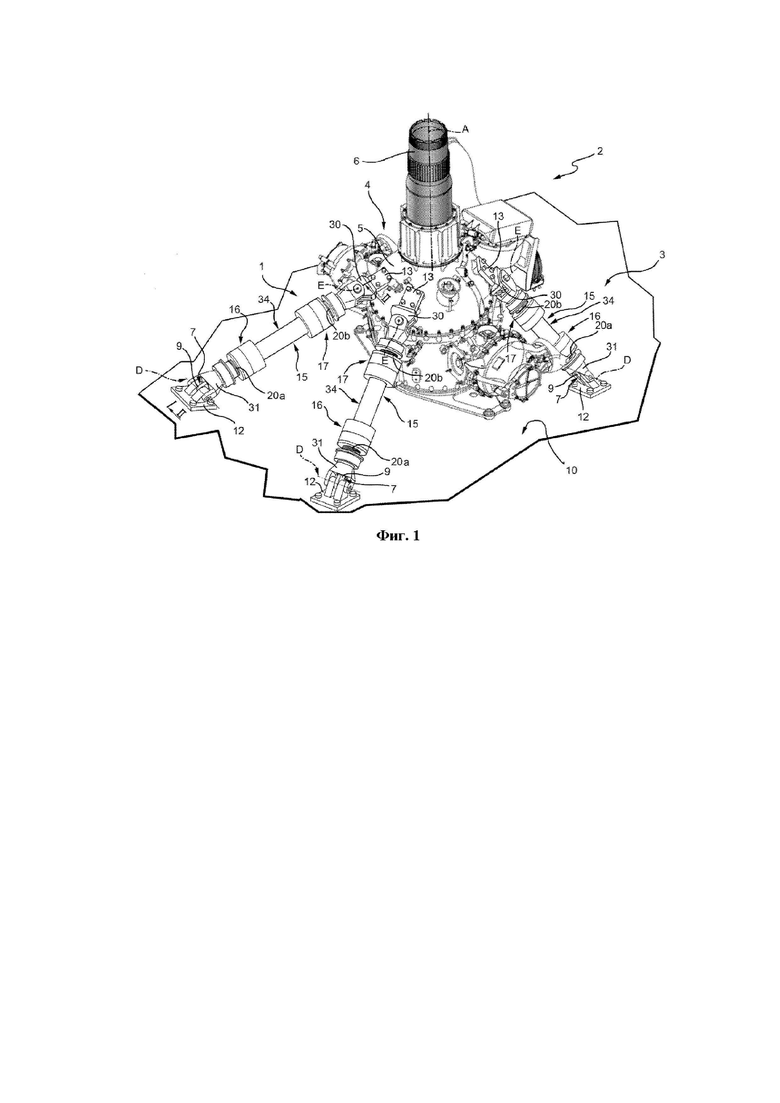
- фиг.1 представляет собой боковую проекцию в перспективе корпуса трансмиссии основного винта вертолета с комплектом в соответствии с первым вариантом осуществления настоящего изобретения, части которого удалены для ясности;
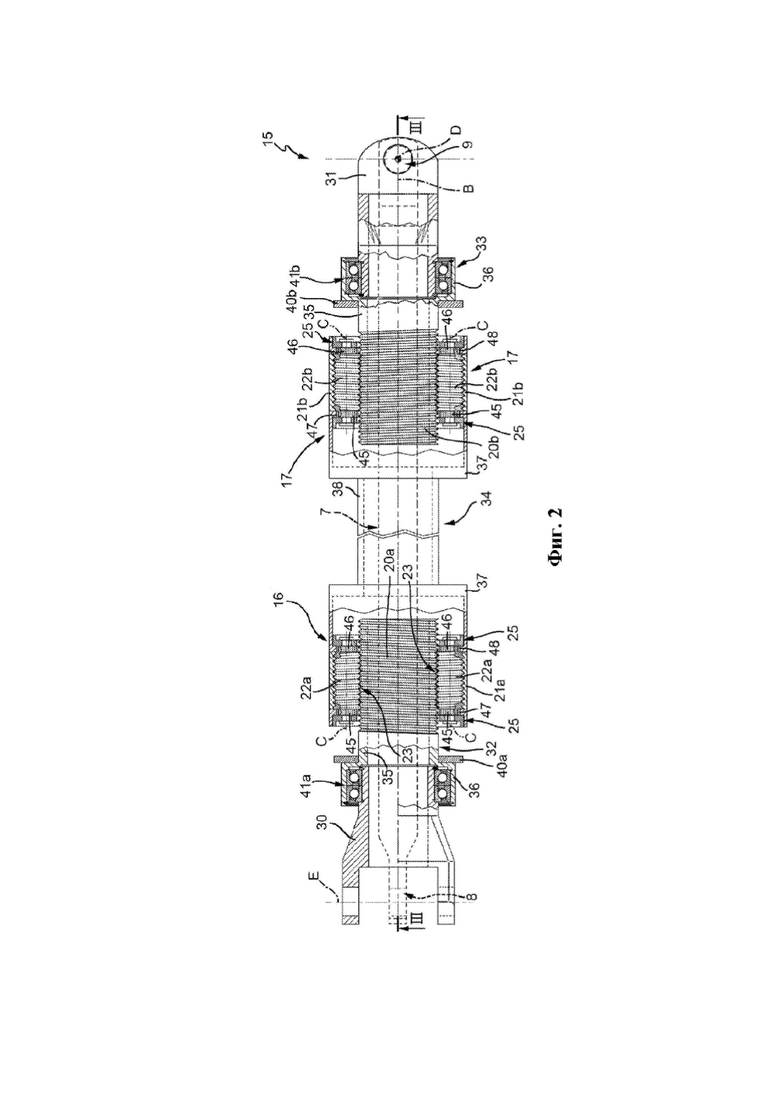
- фиг.2 представляет собой сечение в увеличенном масштабе вдоль оси II-II по фиг.1 компонента комплекта по фиг.1 с частями, удаленными для ясности;
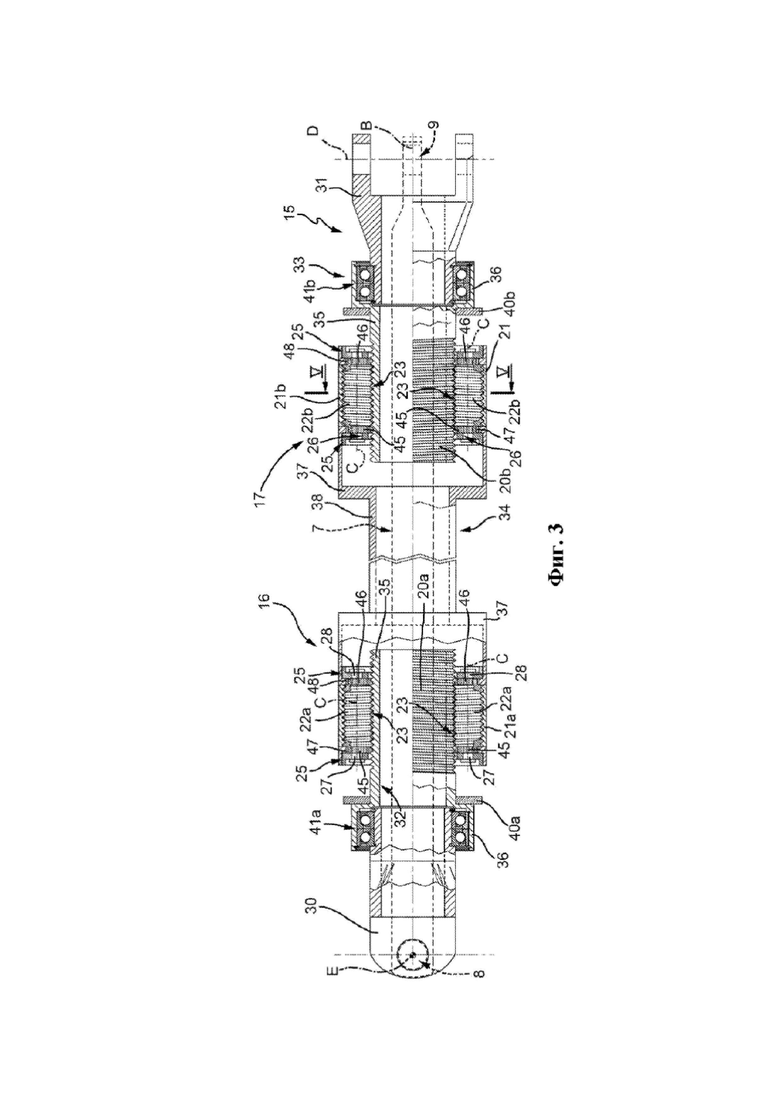
- фиг.3 представляет собой сечение в увеличенном масштабе вдоль линии III-III по фиг.2 компонента по фиг.2 с частями, удаленными для ясности;
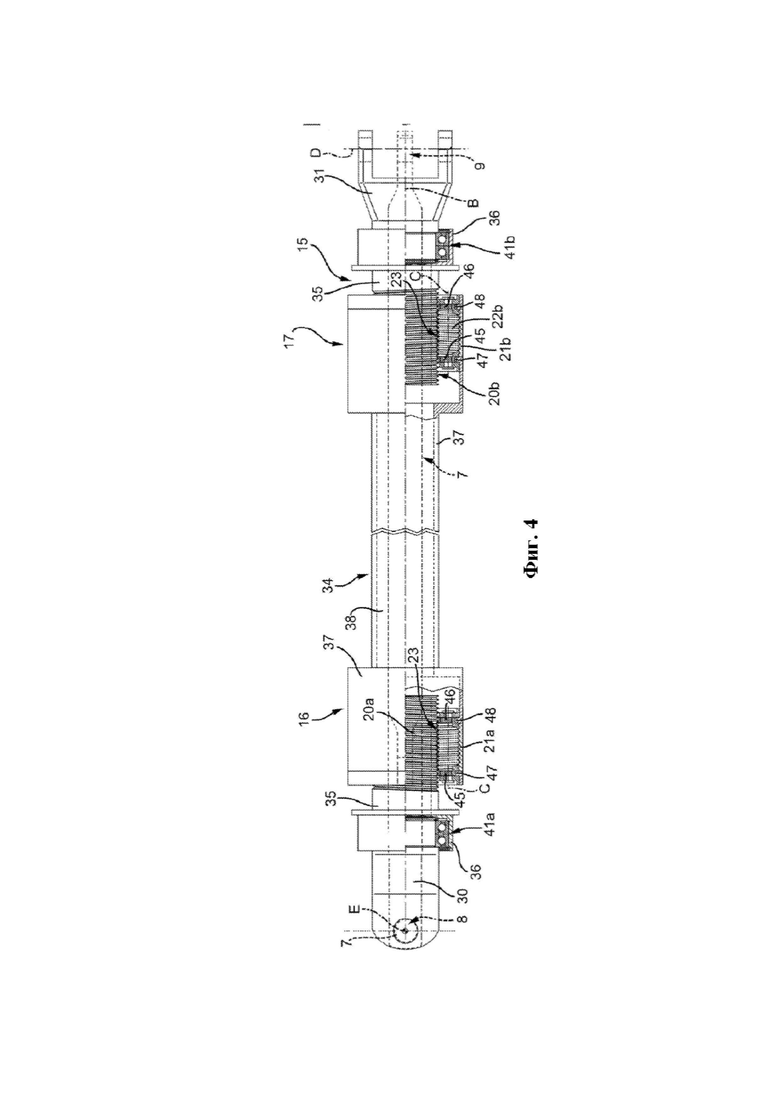
- фиг.4 представляет собой вид в разрезе компонента по фиг.2 и 3, части которого удалены для ясности;
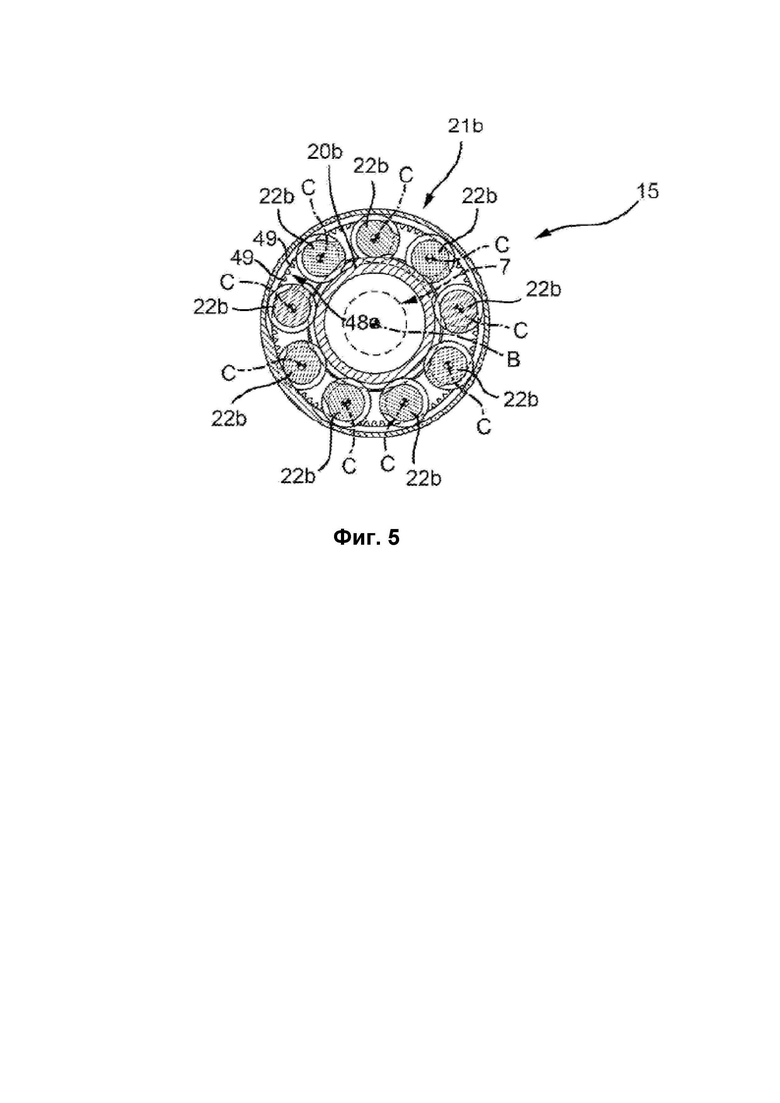
- фиг.5 представляет собой сечение вдоль линии V-V по фиг.3;
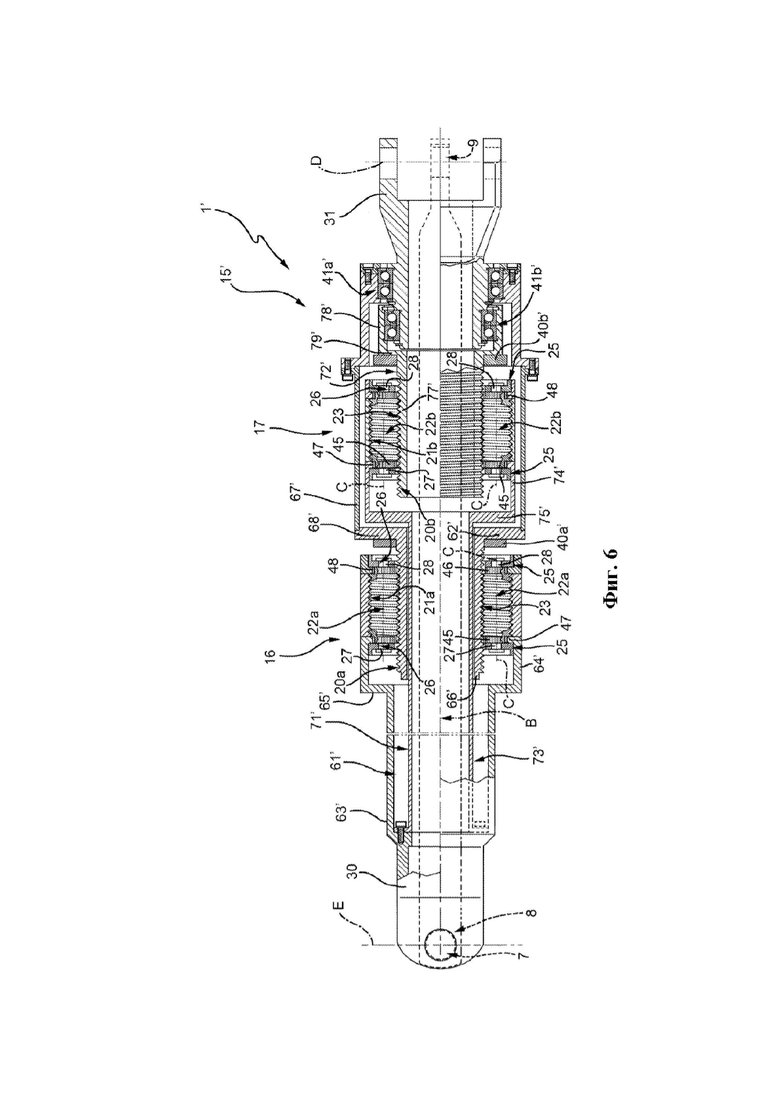
- фиг.6 представляет собой сечение компонента второго варианта осуществления комплекта по фиг.1 с частями, удаленными для ясности; и
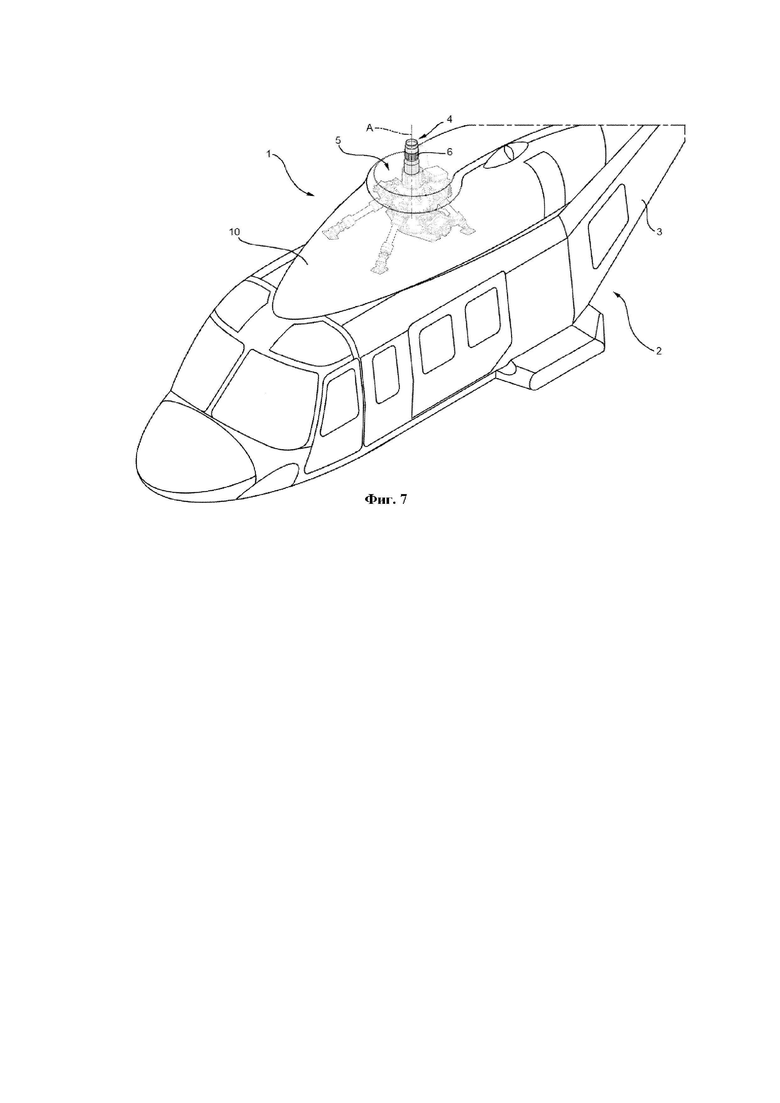
- фиг.7 представляет собой вид в перспективе в очень увеличенном масштабе вертолета, включающего комплект по фиг.1-6.
Как показано на фиг.1, ссылочная позиция 1 обозначает комплект для вертолета 2.
ЛУЧШИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Как показано на фиг.7, вертолет 2 в основном содержит фюзеляж 3, основной винт 4 (показан частично), расположенный на верхней части фюзеляжа 3 и вращающийся вокруг оси А, и хвостовой винт, расположенный на одном конце фюзеляжа 3 и вращающийся вокруг своей собственной оси, поперечной к оси А.
Более подробно, винт 4 показан только в отношении:
- опорного корпуса 5; и
- вала 6, вращающегося вокруг оси А, соединенного не показанным способом, с приводным блоком, например турбиной, установленным на вертолете 1 и функционально соединенным со втулкой (не показана), на которой шарнирно прикреплено множество лопастей (также не показаны).
Вертолет 2 также содержит множество тяг 7, которые проходят вдоль соответствующих осей B, которые наклонены к оси A и имеют соответствующие взаимно противоположные концы 8 и 8, соответственно прикрепленные к корпусу 5 и к верхней части 10 фюзеляжа 3.
Тяги 7 шарнирно прикреплены к соответствующим анкерам 12 и 13, которые удерживаются верхней частью 10 и корпусом 5, соответственно, относительно соответствующих осей D и E.
Комплект 1 содержит множество устройств 15 для гашения вибраций, передаваемых фюзеляжу 3 винтом 4.
В показанном примере имеются четыре устройства 15, связанные с соответствующими тягами 7.
Как показано на фиг.2-5, устройства 15 проходят вдоль соответствующих осей B, являются полыми и вмещают соответствующие тяги 7.
Поскольку устройства 15 являются концептуально идентичными, ниже описано только одно устройство 15.
Более подробно, устройство 15 содержит (фиг.2-5):
- трубчатый осевой наконечник 30, прикрепленный к корпусу 5; и
- трубчатый осевой наконечник 31, аксиально противоположный наконечнику 30 и прикрепленный к верхней части 10 фюзеляжа 2.
Наконечники 30 и 31 шарнирно прикреплены к соответствующим анкерам 12 и 13 относительно соответствующих осей E и D.
Как следствие, наконечник 30 подвергается движению осевой вибрации, параллельной оси B, которая вызывается вибрационными нагрузками, передаваемыми корпусом 5.
Предпочтительно устройство 15 содержит (фиг.2-5):
- пару гаек 21a и 21b, перемещающихся параллельно оси B в результате вибраций, передаваемых от корпуса 5;
- пару винтов 20a и 20b, вращающихся вокруг оси B и функционально соединенных с соответствующими гайками 21a и 21b, чтобы вибрировать в окружном направлении вокруг оси B;
- инертор 16; и
- инертор 17;
инертор 16, в свою очередь, содержит:
- винт 20a;
- гайку 21a; и
- множество резьбовых роликов 22а, которые имеют резьбу 23, навинчиваемую на соответствующий винт 20а и на соответствующую гайку 21а, могут вращаться вокруг соответствующих осей С, параллельных оси В и отделенных от нее, относительно винта 20а и гайки 21а, и могут вращаться вокруг оси B относительно винта 20a и гайки 21a;
инертор 17, в свою очередь, содержит:
- винт 20b;
- гайку 21b; и
- множество резьбовых роликов 22b, которые имеют резьбу 23, навинчиваемую на соответствующий винт 20b и на соответствующую гайку 21b, могут вращаться вокруг соответствующих осей С, параллельных оси В и отделенных от нее, относительно винта 20b и гайки 21b, и могут вращаться вокруг оси B относительно винта 20b и гайки 21b.
Проходя вдоль оси B от наконечника 30 к наконечнику 31, инертор 16 располагается между наконечником 30 и инертором 17, а инертор 17 располагается между инертором 16 и наконечником 31.
Другими словами, инерторы 16 и 17 расположены «последовательно» вдоль оси B.
Инертор 16 прикладывает силу к наконечнику 30 и инертору 17 пропорционально разнице в ускорении между наконечником 30 и инертором 17.
Инертор 17 прикладывает силу к инертору 16 и наконечнику 31 пропорционально разнице в ускорении между инертором 16 и наконечником 31.
В этой «последовательной» конфигурации каждый инертор подвергается половине относительного смещения между наконечником 30 и наконечником 31, в то время как нагрузка, которая проходит через них, является одинаковой.
В результате устройство 15 оказывает усилие на наконечники 30 и 31 и, следовательно, на корпус 5 винта 4 и фюзеляж 2, которое пропорционально разнице в ускорении вдоль оси B между наконечниками 30 и 31 и, следовательно, между корпусом 5 винта 4 и верхней частью 10 фюзеляжа 3.
Вышеуказанное усилие позволяет сдерживать передачу вибраций от корпуса 5 к верхней части 10 фюзеляжа 2.
В частности, каждый инертор 16 и 17 обладает инерцией, равной удвоенной суммарной инерции устройства 15.
Это связано с тем, что каждый инертор 16 и 17 подвергается смещению и, следовательно, ускорению, соответствующему половине смещения, и, следовательно, ускорению между наконечником 30 и 31. В этом описании под инерцией мы понимаем соотношение между силой, создаваемой устройством, и относительным ускорением между его концами на определенной частоте.
Инерторы 16 и 17 проходят вдоль общей оси B.
Взаимно совпадающие оси B инерторов 16 и 17 составляют ось продольного расположения устройства 15.
Винты 20a и 20b инерторов 16 и 17 вращательно вибрируют вокруг общей оси B, гайки 21a и 21b инерторов 16 и 17 вибрируют в осевом направлении вокруг общей оси B, а ролики 22a и 22b инерторов 16 и 17 вращательно вибрируют вокруг своих соответствующих осей C и описывают вращательное движение вокруг общей оси B.
В частности, винты 20a и 20b инерторов 16 и 17 вращаются вокруг общей оси B в противоположных направлениях вращения друг от друга для создания момента инерции, направленного вокруг оси B с одинаковым коэффициентом и противоположным направлением на фюзеляже 3.
Гайки 21a и 21b инерторов 16 и 17 соединены друг с другом.
Устройство 15 также содержит:
- трубчатое тело 32, вмещающее винт 20а инертора 16;
- трубчатое тело 33, вмещающее винт 20b инертора 17; и
- тело 34, вмещающее гайки 21a и 21b инерторов 16 и 17.
Каждое тело 32 и 33 содержит, в частности:
- часть 35, на которой располагаются соответствующие винты 20а и 20b; и
- колоколообразная часть 36 большего радиального размера, чем часть 35;
Тело 34 содержит:
- две части 37, вмещающие соответствующие гайки 21a и 21b и имеющие больший диаметр, чем части 35; и
- часть 38, расположенную в осевом направлении между частями 37 вдоль общей оси B и имеющую меньший диаметр, чем части 37.
Части 35 размещаются внутри частей 37 и разнесены радиально от них таким образом, чтобы они были радиально обращены к оси B, винтам 20a и 20b каждого инертора 16 и 17 с соответствующими гайками 21a и 21b.
Каждый инертор 16 и 17 также содержит:
- соответствующий маховик 40a и 40b, вращающийся как одно целое с соответствующими винтами 20a и 20b вокруг соответствующей оси B;
- соответствующий упорный подшипник 41a и 41b, радиально расположенный между частью 36 соответствующего тела 32 и 33 и соответствующим наконечником 30 и 31.
В показанном примере каждый маховик 40a и 40b расположен на плече, определяемом частью 36 соответствующего тела 32 и 33.
Маховики 40a и 40b вращательно вибрируют вместе с соответствующими винтами 20a и 20b, и 21a и 21b, вокруг оси B.
Размер маховиков 40a и 40b каждого инертора 16 и 17 подобран таким образом, чтобы достичь желаемого значения момента инерции, равного сумме моментов инерции винтов 20a и 20b, роликов 22a и 22b (для последних принимается во внимание, что их скорость вращения отличается от скорости вращения маховиков 40a и 40b), тел 32 и 33 и маховиков 40a и 40b. Это значение момента инерции определяет инерционность соответствующего инертора 16 и 17 и настраивает устройство 15 на предварительно определенное значение частоты вибрации корпуса 5, передачу которой на фюзеляж 3 требуется предотвратить.
Подшипники 41a и 41b обеспечивают относительное вращение соответствующего тела 32 и 33 относительно соответствующего наконечника 30 и 31 вокруг соответствующей оси B.
Винт 20a и 20b и гайка 21a и 21b каждого инертора имеют многозаходные резьбы.
Винт 20a и 20b и гайка 21a и 21b каждого инертора 16 и 17 расположены радиально обращенными друг к другу и радиально разнесенными друг от друга относительно оси B.
Ролики 22a и 22b каждого инертора 16 и 17 расположены радиально между соответствующим винтом 20a и 20b и гайкой 21a и 21b в направлении, радиальном относительно оси B.
Ролики 22a и 22b каждого инертора 16 и 17 расположены вдоль их соответствующих осей C, и каждый из них имеет наружную резьбу 23 относительно соответствующей оси C.
Для достижения вращения во взаимно противоположных направлениях, резьбы винта 20а и гайки 21а и резьбы 23 роликов 22а инертора 16 имеют первое направление резьбы, и резьбы винта 20b и гайки 21b и резьбы 23 роликов 22b инертора 17 имеют такое же первое направление резьбы.
Ролики 22a и 22b каждого инертора 16 и 17 перемещаются за одно целое с гайкой 21a и 21b с перемещением в направлении, параллельном оси B.
Предпочтительно угол резьбы 23 на роликах 22a и 22b каждого инертора 16 и 17 равен углу резьбы гайки 21a и 21b.
Каждый ролик 22a и 22b также содержит:
- два взаимно противоположных осевых конца 27 и 28; и
- два зубчатых колеса 45 и 46, расположенных рядом с соответствующими концами 27 и 28.
В показанном варианте осуществления резьбы 23 роликов 22a и 22b каждого инертора 16 и 17 являются однозаходными резьбами.
Важно подчеркнуть, что углы резьб 23 роликов 22a и 22b, винта 20a и 20b и гайки 21a и 21b инерторов 16 и 17, показанные на прилагаемых фигурах, являются исключительно ориентировочными.
Соединение между резьбами 23 роликов 22a и 22b и винтом 20a и 20b и гайкой 21a и 21b инерторов 16 и 17 является реверсивным.
Каждый инертор 16 и 17 также содержит две коронные шестерни 47 и 48, соответственно прикрепленные к гайке 21а и 21b и выполненные за одно целое с гайкой 21а и 21b.
Коронки 47 и 48 каждого инертора 16 и 17 соосны оси B и разнесены по оси B.
Каждая коронка 47 и 48 имеет внутренние зубья 49, зацепляющиеся с соответствующими зубчатыми колесами 45 и 46 каждого ролика 22a и 22b.
Таким образом, зубчатые колеса 45 и 46 каждого инертора 16 и 17 входят в зацепление с (фиг.5) зубьями 49 при вращении роликов 22а, 22b вокруг оси В.
Каждый инертор 16 и 17 также содержит соответствующую пару дискообразных опор 25 на оси B, разнесенных друг от друга вдоль соответствующей оси B и, в показанном примере, выполненных за одно целое с соответствующей гайкой 21a и 21b.
Каждая опора 25 образует множество гнезд 26, расположенных под углом на равных расстояниях друг от друга вокруг оси B и соединенных осевыми концами 27 соответствующих роликов 22a и 22b.
В показанном варианте осуществления существует радиальный люфт между опорами 25 и частью 36, которую не видно на фиг.2 и 3.
В альтернативном варианте осуществления между опорами 25 и частью 36, содержащей гайки 21a и 21b, могут быть вставлены элементы, изготовленные из материала с низким коэффициентом трения.
Концы 8 и 9 тяги 7 размещены внутри наконечников 30 и 31 соответственно.
Тяга 7 проходит от конца 8 к концу 9 вдоль общей оси B, внутри наконечника 30, трубчатых тел 32, 34 и 33 и наконечника 31.
В частности, диаметр тяги 7 меньше диаметра винта 20a и 20b.
В процессе эксплуатации вал 6 вращает втулку и лопасти вокруг оси А.
Вращение втулки и лопастей создает аэродинамические нагрузки на лопасти и последующие вибрации, которые передаются на вал 6.
Тяги 7 соединяют фюзеляж 3 с корпусом 5 винта 4.
Принцип действия вертолета 2 поясняется далее со ссылкой на одну тягу 7 и одно устройство 15.
Работа винта 4 вызывает появление вибрационных нагрузок.
Эти вибрационные нагрузки передаются от корпуса 5 винта 4 на наконечник 30 на анкере 13.
Наконечник 30 шарнирно закреплен на анкере 13 вокруг оси Е.
Таким образом, работа винта 4 вызывает создание осевых вибраций на наконечнике 30, направленных параллельно оси В.
Эти осевые вибрации заставляют оси D и E перемещаться друг к другу и друг от друга, а также к сжатию/вытяжению тяги 7.
Как следствие, гайки 21a и 21b и трубчатое тело 34 вибрируют в осевом направлении, параллельно оси B.
Ролики 22a и 22b инерторов 16 и 17 также вибрируют параллельно оси B, как одно целое с соответствующими гайками 21a и 21b.
Кроме того, благодаря соединению их соответствующих резьб 23 с резьбой соответствующих гаек 21a и 21b и винтов 20a и 20b, ролики 22a и 22b:
- вращательно вибрируют вокруг своих соответствующих осей С относительно соответствующих винтов 20а и 20b и гаек 21а и 21b; и
- описывают вращательное движение вокруг оси B относительно соответствующих винтов 20a и 20b и гаек 21a и 21b.
В частности, опоры 25 вращательно вибрируют вокруг оси B как одно целое с роликами 22a и 22b, чтобы ролики 22a и 22b оставались равномерно разнесенными под углом относительно оси B.
Кроме того, при вращательной вибрации роликов 22a и 22b соответствующие зубчатые колеса 45 и 46 входят в зацепление с зубом 49 коронок 47 и 48, зафиксированных относительно гайки 21a и 21b инертора 16 и 17.
Это позволяет роликам 22a и 22b соответствующих инерторов 16 и 17 вращаться вокруг оси B.
Вращение роликов 22a и 22b вокруг соответствующих осей C вызывает вращение соответствующих винтов 20a и 20b инерторов 16 и 17 вокруг осей B.
Маховики 40a и 40b и соответствующие тела 32 и 33 инерторов 16 и 17 вращательно вибрируют вокруг оси B.
Благодаря наличию подшипников 41a и 41b, тела 32 и 33 и, следовательно, винты 20a и 20b инерторов 16 и 17 могут вращательно вибрировать вокруг оси B относительно наконечников 30 и 31.
Устройство 15, таким образом, создает инерционные вибрационные силы, возникающие в результате вибрационного движения, передаваемого от корпуса 5 к наконечнику 30.
Более конкретно, эти инерционные вибрационные силы обусловлены попеременной вращательной вибрацией роликов 22a и 22b тел 32 и 33, винтов 20a и 20b и маховиков 40a и 40b инерторов 16 и 17.
Благодаря попеременному вращению роликов 22а, винта 20а, тел 32 и 33 и маховика 40а инертора 16, последний прикладывает одинаковые крутящие силы к наконечнику 30 и к инертору 17. Эти равные силы противоположны друг другу и пропорциональны относительному ускорению между наконечником 30 и инертором 17.
Совершенно аналогичным образом инертор 17 прикладывает одинаковые крутящие силы к инертору 16 и к наконечнику 31. Эти равные силы противоположны друг другу и пропорциональны относительному ускорению между инертором 16 и наконечником 31.
Силы, которыми обмениваются инерторы 16 и 17, равны и противоположны друг другу.
Следовательно, устройство 15 прикладывает равные крутящие силы к наконечникам 30 и 31 и, таким образом, к корпусу 5 винта 4 и верхней части 10 фюзеляжа 3.
Эти крутящие силы ослабляют или подавляют вибрации, передаваемые на фюзеляж 3, без создания крутящего момента на фюзеляже 3, тем самым повышая удобство пассажиров вертолета 2.
На фиг.6 числовая ссылочная позиция 1’ обозначает комплект в соответствии с дополнительным вариантом осуществления настоящего изобретения.
Комплект 1’ аналогичен комплекту 1 и будет описан ниже только в отношении его отличий от последнего. Где это возможно, одинаковые или соответствующие части комплекта 1 и комплекта 1’ будут обозначены одинаковыми ссылочными номерами.
В частности, устройство 15’ из комплекта 1’ отличается от устройства 15 из комплекта 1 тем, что инерторы 16 и 17 расположены параллельно, а не последовательно.
Более подробно, устройство 15’ отличается от устройства 15 в том, что:
- обе гайки 21a и 21b крепятся к наконечнику 30; и
- оба винта 20a и 20b поддерживаются упорными подшипниками 41a’ и 41b’ относительно наконечника 31.
Более подробно, устройство 15’ содержит:
- тело 61’, выполненное с возможностью вибрации параллельно оси B, содержащее гайку 21a и прикрепленное к наконечнику 30; и
- тело 62’, вращающееся вокруг оси B, содержащее винт 20a, поддерживаемый упорным подшипником 41a’ относительно наконечника 31, и к которому крепится маховик 40a’.
Тело 61’, в свою очередь, содержит:
- осевую часть 63’, прикрепленную к наконечнику 30;
- осевую часть 64’, имеющую больший диаметр, чем часть 63’, и содержащую гайку 21b; и
- радиальное плечо 65’, которое аксиально расположено между частями 63’ и 64’.
Тело 62’, в свою очередь, содержит:
- осевую часть 66’, обращенную к наконечнику 30 и содержащую винт 20а;
- часть 67’, аксиально поддерживаемую подшипником 41а’ и имеющую больший диаметр, чем часть 66’; и
- радиальное плечо 68’, аксиально расположенное между частями 66’ и 67’ и к которому крепится маховик 40a’.
В частности, часть 66’ тела 62’ располагается с радиальным люфтом внутри части 64’ тела 61’.
Устройство 15’ также содержит:
- тело 71’, выполненное с возможностью вибрации параллельно оси B, содержащее гайку 21b и прикрепленное к наконечнику 30; и
- тело 72’, вращающееся вокруг оси B, содержащее винт 20b, поддерживаемый упорным подшипником 41b’ относительно наконечника 31, и к которому крепится маховик 40b’.
Тело 71’, в свою очередь, содержит:
- осевую часть 73’, прикрепленную к наконечнику 30;
- осевую часть 74’, имеющую больший диаметр, чем часть 73’, и содержащую гайку 21b; и
- радиальное плечо 75’, которое аксиально расположено между частями 73’ и 74’.
Части 73’ и 74’ тела 71’ располагаются с радиальным люфтом внутри частей 63’ и 67’ тела 62’.
Тело 72’, в свою очередь, содержит:
- осевую часть 77’, обращенную к наконечнику 30 и содержащую винт 20b;
- осевую часть 78’, аксиально поддерживаемую упорным подшипником 41b’ и имеющую больший диаметр, чем часть 77’; и
- радиальное плечо 79’, к которому крепится маховик 40b’.
Части 77’ и 78’ тела 72’ располагаются с радиальным люфтом внутри части 74’ тела 71’ и части 67’ тела 62’, соответственно.
В показанном случае тела 61’, 62’, 71’ и 72′ имеют форму колокола.
Наконец, устройство 15’ отличается от устройства 15 тем, что резьбы винта 20а, гайки 21а и роликов 22а инертора 16 имеют первое направление резьбы, а резьбы винта 20b, гайки 21b и роликов 22b инертора 17 имеют второе направление резьбы, противоположное первому направлению резьбы.
Это позволяет осуществлять вращение во взаимно разных направлениях винтов 20a и 20b и роликов 22a и 22b инерторов 16 и 17.
Функционирование комплекта 1’ отличается от функционирования комплекта 1 в том, что работа винта 4 заставляет оси D и E перемещаться друг к другу и друг от друга и, как следствие, создавать осевые вибрации на наконечнике 30 и на гайках 21a и 21b инерторов 16 и 17.
В этом примере «параллельной» конфигурации инерторы 16 и 17 подвергаются тому же относительному смещению и, следовательно, тому же ускорению, что и наконечники 30 и 31. Отсюда следует, что общая инерционность устройства 15 вдвое превышает инерционность одиночного инертора 16 и 17. Осевые вибрации гаек 21а и 21b инерторов 16 и 17 вызывают осевые вибрации роликов 22а и 22b инерторов 16 и 17.
Кроме того, благодаря соединению соответствующих резьб 23 с резьбами соответствующей гайки 21а и винта 20а инертора 16, ролики 22а инертора 16:
- вращательно вибрируют вокруг своих соответствующих осей С относительно соответствующих винтов 20а и гаек 21а; и
- описывают вращательное движение вокруг оси B относительно соответствующих винтов 20a и гаек 21a.
Кроме того, вращательная вибрация роликов 22a инертора 16 вокруг соответствующих осей C вызывает вращательную вибрацию винта 20a и маховика 40a инертора 16 вокруг оси B.
Посредством соединения между резьбами 23 роликов 22b и резьбой гайки 21b ролики 22b:
- вращательно вибрируют вокруг своих соответствующих осей С относительно соответствующих винтов 20b и гаек 21b инертора 17; и
- описывают вращательное движение вокруг оси B относительно соответствующих винтов 20b и гаек 21b инертора 17.
Вращательная вибрация роликов 22b инертора 17 вызывает, благодаря соединению между резьбой 23 и резьбой винта 20b инертора 17, вращательную вибрацию винта 20b инертора 17 вокруг оси B.
Подшипники 41a’ и 41b’ выдерживают осевое усилие, создаваемое параллельно оси B соответствующими винтами 20a и 20b.
Подшипники 41a’ и 41b’ также обеспечивают вращение винтов 20a и 20b инерторов 16 и 17 относительно наконечника 31, тем самым позволяя избежать передачи вращательных вибраций на наконечник 31 и, следовательно, на фюзеляж 3.
Аналогично устройству 15 из комплекта 1, устройство 15’ из комплекта 1’ создает инерционные вибрационные силы из-за вращательной вибрации роликов 22a и 22b, винтов 20a и 20b, гайки 21b и маховиков 40a и 40b инертеров 16 и 17.
Совершенно аналогично устройству 15 из комплекта 1, устройство 15’ из комплекта 1’ прикладывает итоговые равные крутящие силы к наконечникам 30 и 31 и, следовательно, к корпусу 5 винта 4 и к верхней части 10 фюзеляжа 3.
Эти крутящие силы ослабляют или подавляют вибрации, передаваемые на фюзеляж 3, тем самым повышая удобство пассажиров вертолета 2.
Совершенно аналогично устройству 15 из комплекта 1, устройство 15’ создает крутящий момент на фюзеляже 3 вокруг оси B с практически нулевым коэффициентом, когда два инертора 16 и 17 вырабатывают инерционный реактивный крутящий момент, в идеале с равным коэффициентом, в противоположных направлениях.
По результатам исследования комплекта 1 и 1’ согласно настоящему изобретению очевидны преимущества, которые могут быть достигнуты путем его реализации.
В частности, комплект 1 и 1’ содержит множество демпфирующих устройств 15 и 15′, каждое из которых содержит пару инерторов 16 и 17.
Инерторы 16 и 17 преобразуют вибрации корпуса 5 винта 4 во вращательную вибрацию винтов 20а и 20b, роликов 22а и 22b и маховиков 40а и 40b.
Эта вращательная вибрация создает силу, действующую на анкеры 12 и 13, которая пропорциональна относительному ускорению анкеров 12 и 13.
Эта сила сдерживает передачу вибраций на анкер 13 и, следовательно, на фюзеляж 3, улучшая воспринимаемое удобство пассажиров внутри вертолета 2.
Поскольку винты 20a и 20b и, следовательно, также маховики 40a и 40b инерторов 16 и 17 вращаются в противоположных друг от друга направлениях, момент инерции, передаваемый фюзеляжу 3 вертолета 2, практически равен нулю.
Это позволяет дополнительно повысить удобство пассажиров вертолета 2 с очевидными преимуществами для вертолетов в VIP-сегменте.
В частности, благодаря «последовательной» компоновке инерторы 16 и 17 устройства 15 подвергаются уменьшенным угловым ускорениям и, таким образом, подвержены меньшему износу деталей, особенно резьб винтов 20 и гаек 21, а также резьб 23 роликов 22.
Благодаря «параллельной» конфигурации инерторы 16 и 17 устройства 15’ используют полную инерцию каждого инертора 16 и 17, что позволяет свести к минимуму массу маховиков 40a’ и 40b’ при той же эффективности устройства 15’.
Кроме того, инерторы 16 и 17 устройства 15 имеют уменьшенные ускорения, и инерторы 16 и 17 устройства 15’ имеют особенно малые размеры, что снижает риск повреждения устройств 15 и 15’. Каждое устройство 15 и 15’ содержит тягу 7 и шарнирно соединено с соответствующими анкерами 12 и 13 вокруг таких же шарнирных осей D и E соответствующей тяги 7 с анкерами 12 и 13.
Следовательно, устройства 15 и 15’ не требуют какой-либо существенной модернизации вертолета 2 и используют уже установленные анкеры 12 и 13 для крепления тяг 7 между корпусом 5 и верхней частью 10 фюзеляжа 3.
Кроме того, это делает комплект 1 и 1’ пригодным для переоснащения особо простым и недорогим способом уже существующих вертолетов 2, оснащенных тягами 7.
Для этого достаточно навесить устройство 15 и 15’ на уже существующие анкеры 12 и 13 вокруг осей D и E.
Наконец, разумеется, в описанном и проиллюстрированном здесь комплекте 1 и 1’ могут быть выполнены модификации и варианты исполнения, без выхода за рамки, определенные формулой изобретения.
В частности, винты 20a и 20b устройств 15 и 15’ могут скользить относительно оси B, а гайки 21a и 21b могут вращаться вокруг оси B.
В этом случае, применительно к устройствам 15, соответствующие гайки 21a и 21b поддерживаются соответствующими подшипниками 41a и 41b на соответствующих наконечниках 30 и 31, и соответствующие винты 20a и 20b соединены друг с другом.
Что касается устройств 15’, соответствующие винты 20a и 20b крепятся к наконечнику 30, а соответствующие гайки 21a и 21b аксиально поддерживаются наконечником 31, с использованием соответствующих подшипников 41a’ и 41b’.
Кроме того, в дополнение к вращению вокруг оси B относительно винта 20a и 20b ролики 22a и 22b устройств 15 и 15’ также могут свободно перемещаться по оси относительно гайки 21a и 21b параллельно оси B.
Кроме того, устройства 15 и 15’ могут быть размещены внутри соответствующих тяг 7 или соединены с другими соответствующими конструктивными элементами, расположенными между верхней частью 10 фюзеляжа 3 и корпусом 5.
Наконец, трубчатые тела 32 и 33 каждого устройства 15 и 15’ могут быть непосредственно прикреплены к соответствующей тяге 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТ ДЛЯ СПОСОБНОГО К ЗАВИСАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2757548C2 |
| УСТРОЙСТВО ГАШЕНИЯ ВИБРАЦИИ ДЛЯ ВЕРТОЛЕТА | 2019 |
|
RU2777706C2 |
| УСТРОЙСТВО И СПОСОБ ИЗГОТОВЛЕНИЯ СЫРЫХ АВТОМОБИЛЬНЫХ ПОКРЫШЕК | 2015 |
|
RU2684369C2 |
| КОМБИНИРОВАННАЯ УСТАНОВКА НЕПРЕРЫВНОГО ЛИТЬЯ И ПРОКАТКИ С КАРУСЕЛЬНОЙ МОТАЛКОЙ | 2021 |
|
RU2776937C1 |
| СИСТЕМА БИОСЕНСОРА ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ МАГНИТНЫХ ЧАСТИЦ | 2009 |
|
RU2519655C2 |
| Способ проверки неразрывности передачи данных между главным входным блоком и главным выходным блоком | 2015 |
|
RU2677454C1 |
| ВМЕЩАЮЩИЙ ДЕВЕЛОПЕР БЛОК, ТЕХНОЛОГИЧЕСКИЙ КАРТРИДЖ И ЭЛЕКТРОФОТОГРАФИЧЕСКОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2012 |
|
RU2584178C2 |
| КОНТЕЙНЕР ВМЕЩЕНИЯ ПРОЯВИТЕЛЯ, БЛОК ВМЕЩЕНИЯ ПРОЯВИТЕЛЯ, ТЕХНОЛОГИЧЕСКИЙ КАРТРИДЖ, ЭЛЕКТРОФОТОГРАФИЧЕСКОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2012 |
|
RU2579637C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2019 |
|
RU2785230C1 |
| КАНЦЕЛЯРСКИЙ ИНСТРУМЕНТ | 2011 |
|
RU2493970C2 |
Изобретение относится к области авиации, в частности к конструкциям устройств гашения вибраций вертолетов. Устройство гашения вибраций для вертолета (15, 15’), приспособленное для гашения вибраций, передаваемых винтом (4) на фюзеляж (2), содержит два первых резьбовых элемента (21a, 21b; 20a, 20b), двигающихся параллельно вдоль первой оси (B) и приспособленных для вибрации, параллельно указанной первой оси (B), два вторых резьбовых элемента (20a, 20b; 21a, 21b), вращающихся вокруг указанной первой оси (B) и функционально соединенных с соответствующими указанными первыми резьбовыми элементами (21a, 21b; 20a, 20b) с тем, чтобы при эксплуатации вращательно вибрировать вокруг указанной первой оси (В), первый инертор (16) и второй инертор (17). Первый инертор (16) содержит первую гайку (21a), первый винт (20а) и группу первых резьбовых роликов (22а), выполненных с возможностью навинчиваться на указанные первую гайку и первый винт (21а, 20а). Второй инертор (17) содержит вторую гайку (21b), второй винт (20b) и группу вторых резьбовых роликов (22b). Обеспечивается максимальное увеличение срока службы демпфирующего устройства инерционного типа. 2 н. и 13 з.п. ф-лы, 7 ил. 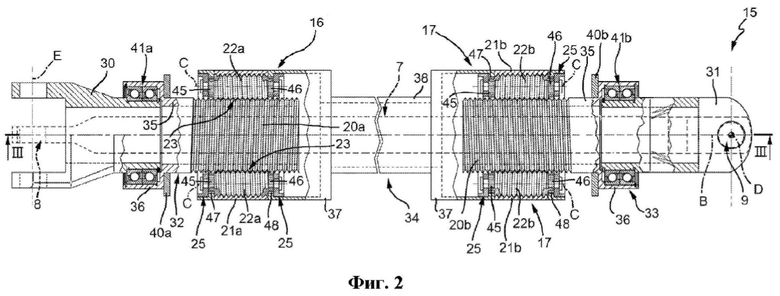
1. Устройство гашения вибраций (15, 15’) для вертолета (2), включающего фюзеляж (3) и винт (4), предназначенное для гашения вибраций, передаваемых от указанного винта (4) на указанный фюзеляж (2), и установки между указанным фюзеляжем (2) и указанным винтом (4);
отличающееся тем, что содержит
- два первых резьбовых элемента (21a, 21b; 20a, 20b), двигающихся параллельно вдоль первой оси (B) и приспособленных для вибрации, параллельно указанной первой оси (B);
- два вторых резьбовых элемента (20a, 20b; 21a, 21b), вращающихся вокруг указанной первой оси (B) и функционально соединенных с соответствующими указанными первыми резьбовыми элементами (21a, 21b; 20a, 20b) с тем, чтобы при эксплуатации вращательно вибрировать вокруг указанной первой оси (В);
- первый инертор (16) и
- второй инертор (17);
при этом указанный первый инертор (16) содержит
- первую гайку (21a);
- первый винт (20а), функционально соединенный с указанной первой гайкой (21а); и
- группу первых резьбовых роликов (22а), выполненных с возможностью навинчиваться на указанные первую гайку и первый винт (21а, 20а); при этом указанные первые ролики (22a) выполнены с возможностью вращения вокруг соответствующих вторых осей (C) параллельно и отдельно от указанной первой оси (B) относительно указанных первой гайки и первого винта (21a, 20a) и вращения вокруг указанной первой оси (B) относительно указанных первой гайки и первого винта (21a, 20a);
при этом указанный второй инертор (17) содержит
- вторую гайку (21b);
- второй винт (20b), функционально соединенный с указанной второй гайкой (21b); и
- группу вторых резьбовых роликов (22b), выполненных с возможностью навинчиваться на указанные вторую гайку и второй винт (21b, 20b); при этом указанные вторые ролики (22b) выполнены с возможностью вращения вокруг соответствующих вторых осей (C) параллельно и отдельно от указанной первой оси (B) относительно указанных второй гайки и второго винта (21b, 20b) и вращения вокруг указанной первой оси (B) относительно указанных второй гайки и второго винта (21b, 20b);
при этом указанные первая и вторая гайки (21a, 21b) образуют указанные первые резьбовые элементы (21a, 21b; 20a, 20b), и указанные первый и второй винты (20b, 20a) образуют указанные вторые резьбовые элементы (20a, 20b; 21a, 21b); или
указанные первый и второй винты (20b, 20а) образуют указанные первые резьбовые элементы (21a, 21b; 20a, 20b), и указанные первая и вторая гайки (21а, 21b) образуют указанные вторые резьбовые элементы (20a, 20b; 21a, 21b).
2. Устройство по п.1, отличающееся тем, что указанные вторые резьбовые элементы (20а, 20b; 21а, 21b) выполнены с возможностью вращения с взаимно противоположными направлениями вращения; и/или
отличающееся тем, что указанные первые оси (B) указанных первого и второго инерторов (16, 17) совпадают друг с другом и образуют ось расположения указанного устройства (15, 15’); и/или
отличающееся тем, что указанные вторые оси (C) вращения указанных первых и вторых роликов (22a, 22b) совпадают друг с другом.
3. Устройство по п.1 или 2, отличающееся тем, что указанные первый и второй инерторы (16, 17) имеют одинаковую инерцию.
4. Устройство по п.3, отличающееся тем, что оно содержит
- первый маховик (40а, 40а’), совмещенный в угловом направлении с указанным вторым резьбовым элементом (20а) указанного первого инертора (16); и/или
- второй маховик (40b, 40b’), совмещенный в угловом направлении с указанным вторым резьбовым элементом (20b) указанного второго инертора (17).
5. Устройство по любому из предшествующих пунктов, отличающееся тем, что указанные первые резьбовые элементы (21а, 21b) указанных первого и второго инерторов (16, 17) выполнены с возможностью перемещения за одно целое параллельно указанной первой оси (В).
6. Устройство по любому из предшествующих пунктов, отличающееся тем, что оно содержит
- первый анкерный элемент (30), шарнирно соединяемый с указанным винтом (4);
- первый подшипник (41a), который поддерживает указанный второй резьбовой элемент (20a) указанного первого инертора (16) с возможностью углового перемещения относительно указанной первой оси (B);
- второй анкерный элемент (31), шарнирно соединяемый с указанным фюзеляжем (3); и
- второй подшипник (41b), который поддерживает указанный второй резьбовой элемент (20b) указанного второго инертора (17) с возможностью углового перемещения относительно указанной первой оси (B).
7. Устройство по п.6, отличающееся тем, что указанный первый инертор (16) располагается между указанным первым анкерным элементом (30) и указанным вторым инертором (17);
при этом указанный второй инертор (17) располагается между указанным первым инертором (16) и указанным вторым анкерным элементом (31).
8. Устройство по любому из предшествующих пунктов, отличающееся тем, что резьбы указанного первого резьбового элемента (21а), указанного второго резьбового элемента (20а) и указанных первых роликов (22а) указанного первого инертора (16) имеют первое направление резьбы;
резьбы указанного первого резьбового элемента (21b), указанного второго резьбового элемента (20b) и указанных вторых роликов (22b) указанного второго инертора (17) имеют такое же первое направление резьбы.
9. Устройство по любому из пп.1-5, отличающееся тем, что оно содержит первый анкерный элемент (30), шарнирно соединяемый с указанным винтом (4);
при этом указанные первые резьбовые элементы (21a, 21b) крепятся к указанному первому анкерному элементу (30).
10. Устройство по любому из пп.1-5 или 9, отличающееся тем, что оно содержит
- второй анкерный элемент (31), шарнирно соединяемый с указанным фюзеляжем (3); и
- два подшипника (41a’, 41b’), расположенные между указанным вторым анкерным элементом (31) и соответствующими указанными вторыми резьбовыми элементами (20a, 20b) и выполненные с возможностью выдерживать нагрузки, направленные вдоль указанной первой оси (B), создаваемые указанными вторыми резьбовыми элементами (20а, 20b).
11. Устройство по любому из пп.1-5, 9 или 10, отличающиеся тем, что резьбы указанного первого резьбового элемента (21а), указанного второго резьбового элемента (20а) и указанных первых роликов (22а) указанного первого инертора (16) имеют первое направление резьбы; и
резьбы указанного первого резьбового элемента (21b), указанного второго резьбового элемента (20b) и указанных вторых роликов (22b) указанного второго инертора (17) имеют второе направление резьбы, противоположное первому направлению резьбы.
12. Устройство по п.10 или 11, отличающееся тем, что оно содержит
- первое тело (61’), прикрепленное к указанному первому опорному элементу (30) и содержащее указанные первые резьбовые элементы (21а) указанного первого инертора (16);
- второе тело (62’), вращающееся вокруг указанной первой оси (B) и содержащее указанный второй резьбовой элемент (20a) указанного второго инертора (16);
- третье тело (71’), прикрепленное к указанному первому опорному элементу (30) и содержащее указанные первые резьбовые элементы (21b) указанного второго инертора (17); и
- четвертое тело (72’), вращающееся вокруг указанной первой оси (B) и содержащее указанный второй резьбовой элемент (20b) указанного второго инертора (17);
при этом указанное второе тело (62’) по меньшей мере частично размещено внутри указанного первого тела (61’);
при этом указанное третье тело (71’) по меньшей мере частично размещено внутри указанного второго тела (62’); и
при этом указанное четвертое тело (72’) по меньшей мере частично размещено внутри указанного третьего тела (61’).
13. Вертолет, содержащий
- указанный фюзеляж (2);
- указанный винт (4);
- опорный корпус (5) указанного винта (4) и
- группу соединительных тяг (7), расположенных между указанным фюзеляжем (2) и указанным опорным корпусом (5);
отличающийся тем, что он содержит для каждой указанной тяги (7) по меньшей мере одно устройство гашения вибраций (15, 15’) по любому из предыдущих пунктов;
при этом указанное устройство (15, 15’) расположено между указанным корпусом (5) и указанным фюзеляжем (2).
14. Вертолет по п.13, отличающийся тем, что указанная по меньшей мере одна тяга (7) и указанное соответствующее устройство (15, 15’) шарнирно прикреплены к указанному фюзеляжу (3) вокруг соответствующих третьих осей (D), совпадающих друг с другом;
при этом указанная по меньшей мере одна тяга (7) и указанное соответствующее устройство (15, 15’) шарнирно соединены с указанным винтом (4) относительно соответствующих четвертых осей (Е), совпадающих друг с другом.
15. Вертолет по любому п.13 или 14, отличающийся тем, что одна из указанных тяг (7) и упомянутое устройство (15, 15’) размещены внутри другой указанной тяги (7) и указанного устройства (15, 15’).
| JP S6078130 A, 02.05.1985 | |||
| US 5568847 A1, 29.10.1996 | |||
| DE 10001159 A1, 26.07.2001 | |||
| US 20180135717 A1, 17.05.2018 | |||
| US 6283408 B1, 04.09.2001 | |||
| Демпфер сухого трения | 1972 |
|
SU436943A1 |

