Перекрестная ссылка на родственные заявки
Настоящая патентная заявка имеет приоритет над европейской патентной заявкой № 19180113.3, поданной 13/06/2019, полное раскрытие которой включено в настоящий документ путем ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к винту для способного к зависанию летательного аппарата, такого как, например, вертолет, конвертоплан или комбинированный вертолет.
В частности, настоящее изобретение относится к винту для вертолета.
УРОВЕНЬ ТЕХНИКИ
Как известно, вертолеты в основном содержат фюзеляж, несущий винт, расположенный на верхней части фюзеляжа и выполненный с возможностью вращаться вокруг своей собственной оси, и рулевой винт, расположенный на конце фюзеляжа.
Более подробно, каждый несущий или рулевой винт, в свою очередь, в основном содержит:
- силовой блок;
- втулку, выполненную с возможностью вращаться вокруг вышеупомянутой оси, и оснащенную группой лопастей, радиально прикрепленных к вышеупомянутой втулке и выступающих из нее; и
- вал несущего винта, соединенный с силовым блоком и функционально соединенный с втулкой для приведения во вращение.
Кроме того, каждый несущий винт содержит блок передачи, размещенный между силовым блоком и валом несущего винта, и снабженный вспомогательной коробкой, неподвижной относительно оси вращения вала несущего винта и удерживаемой на фюзеляже вертолета.
В частности, вспомогательную коробку блока передачи удерживается на фюзеляже группой штанг, которые наклонены относительно оси вращения вала несущего винта, и балкой, известной в отрасли промышленности как “рулевая балка”.
Работа несущего винта представляет наиболее значительный источник вибрации, передаваемой вертолету по существу за счет циклического изменения аэродинамической нагрузки, действующей на каждую лопасть.
Фактически, во время каждого полного вращения вала несущего винта каждая лопасть несущего винта подвергается, во вращающейся системе отсчета, периодическим нагрузкам при частотах Ω и их кратным (2*Ω, 3*Ω, и т.д.), где Ω представляет собой скорость вращения вала несущего винта. В свою очередь, нагрузки, которым подвергается лопасть, вызывают переменные инерционные и конструктивные нагрузки, которые также являются периодическими.
Более конкретно, вышеупомянутые нагрузки вызывают силы и моменты, которые изменяются во времени, которые передаются фюзеляжу через втулку и опорную конструкцию несущего винта, ухудшая комфорт пассажиров в фюзеляже.
Вибрационные нагрузки действуют на втулку и вал несущего винта, как в осевом направлении, так и ортогонально оси вращения вала несущего винта.
В отрасли промышленности известно, что осевые вибрационные нагрузки, действующие на лопасть винта, передаются только к втулке, а, следовательно, к фюзеляжу, с угловыми частотами N*Ω и их относительными кратными, где Ω представляет собой скорость вращения вала несущего винта, а N представляет количество лопастей винта.
И наоборот, для вибрационных нагрузок, ортогональных оси вращения вала несущего винта в системе вращения, только гармоники с угловыми частотами (N+1)*Ω, (N-1)*Ω и кратными им передаются неподвижной системе через втулку, но они также принимаются втулкой, а, следовательно, воспринимаются на фюзеляже с угловыми частотами N*Ω и связанными кратными 2*N*Ω, 3*N*Ω и т.д.
Из вышеизложенного следует, что в отрасли промышленности отчетливо ощущается потребность в ограничении передачи от вала несущего винта к фюзеляжу вибраций с вышеупомянутой угловой частотой, равной произведению скорости вращения вала несущего винта и количества лопастей винта, т.е. N*Ω, которая безусловно является гармоникой с наибольшей амплитудой.
Для этой цели известны пассивные и активные поглощающие устройства, которые выполнены с возможностью поглощать передачу вибраций к фюзеляжу.
Активные поглощающие устройства представляют собой по существу исполнительные устройства, которые оказывают гармоническую силу на втулку или вал несущего винта, которая противодействует силе, создающей вибрации.
Пример этих активных поглощающий устройств проиллюстрирован в патентной заявке EP-A-2857313, на имя того же заявителя.
Эта патентная заявка описывает использование пары исполнительных устройств, функционально соединенных с валом несущего винта и управляемых так, чтобы создавать соответствующие противодействующие силы на вале несущего винта, имеющего компоненты в плоскости, ортогональной оси вращения вала несущего винта.
Дополнительные примеры активных поглощающих устройств описаны в патентной заявке US-A-2016/0325828 и в патенте US-B-8,435,200.
Кроме того, US-A1-2013/0011260 описывает устройство уменьшения вибраций, содержащее: упругое тело; динамический груз; и управляемый груз. Динамический груз поддерживают объектом уменьшения вибраций через упругое тело. Исполнительное устройство заставляет управляемый груз перемещаться относительно динамического груза. Такое устройство уменьшения вибраций может изменять частоту и амплитуду, при которой динамический груз вибрирует относительно объекта уменьшения вибраций, вызывая соответствующее перемещение управляемого груза относительно динамического груза, тем самым позволяя более надежно уменьшать вибрации объекта. Кроме того, такое устройство уменьшения вибраций может уменьшать вибрацию некоторой частоты объекта уменьшения вибраций, даже когда управляемый груз зафиксирован относительно динамического груза.
Активные поглощающие устройства имеют преимущества, заключающиеся в том, что они способны преобразовывать свои свойства в соответствии с изменениями вибрационных условий втулки и вала несущего винта.
Пассивные поглощающие устройства в основном содержат резонирующие системы, оснащенные грузами, подвешенными к валу несущего винта или втулке упругой системой. Вибрация этих подвешенных грузов позволяет по меньшей мере частично поглощать передачу вибраций к фюзеляжу. Эти поглощающие устройства обычно настроены на точную частоту вибраций, подлежащих поглощению, подходящим выбором значения подвешенного груза и жесткости упругой системы.
В некоторых типах вертолетов можно выборочно менять угловую скорость вращения вала несущего винта между:
- первым номинальным значением, которое используют в нормальных рабочих условиях вертолета; и
- вторым значением, большим первого значения, которое используют в особых рабочих условиях вертолета.
В качестве примера, второе значение равно 102% от первого значения.
Это изменение угловой скорости смещает угловую частоту вибрационных нагрузок, передаваемых к фюзеляжу, делая частично неэффективными пассивные резонансные поглотители, которые эффективны только в очень нормальном диапазоне частот, отцентрированном на резонансную частоту.
Это происходит поскольку пассивные поглотители обычно настроены на первое номинальное значение угловой скорости вала несущего винта, и поэтому не полностью оптимизированы для поглощения передачи вибраций к фюзеляжу, когда вал несущего винта вращается при второй угловой скорости.
В отрасли промышленности существует понимание необходимости поглощать передачу осевых вибраций к фюзеляжу оптимальным образом, как при первой угловой скорости, так и при второй угловой скорости вала несущего винта, а также при дополнительных угловых скоростях, в то же время сохраняя конструктивную и внедренческую простоту пассивных поглотителей.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения заключается в предложении винта для способного к зависанию летательного аппарата, который позволяет удовлетворить вышеупомянутую необходимость простым и недорогим образом.
Вышеупомянутую задачу достигают настоящим изобретением, в той мере, в какой оно относится к винту для способного к зависанию летательного аппарата, как определено в пункте 1 формулы изобретения.
Краткое описание чертежей
Для лучшего понимания настоящего изобретения ниже описан предпочтительный вариант выполнения, исключительно путем неограничивающего примера и со ссылкой на сопровождающие чертежи, на которых:
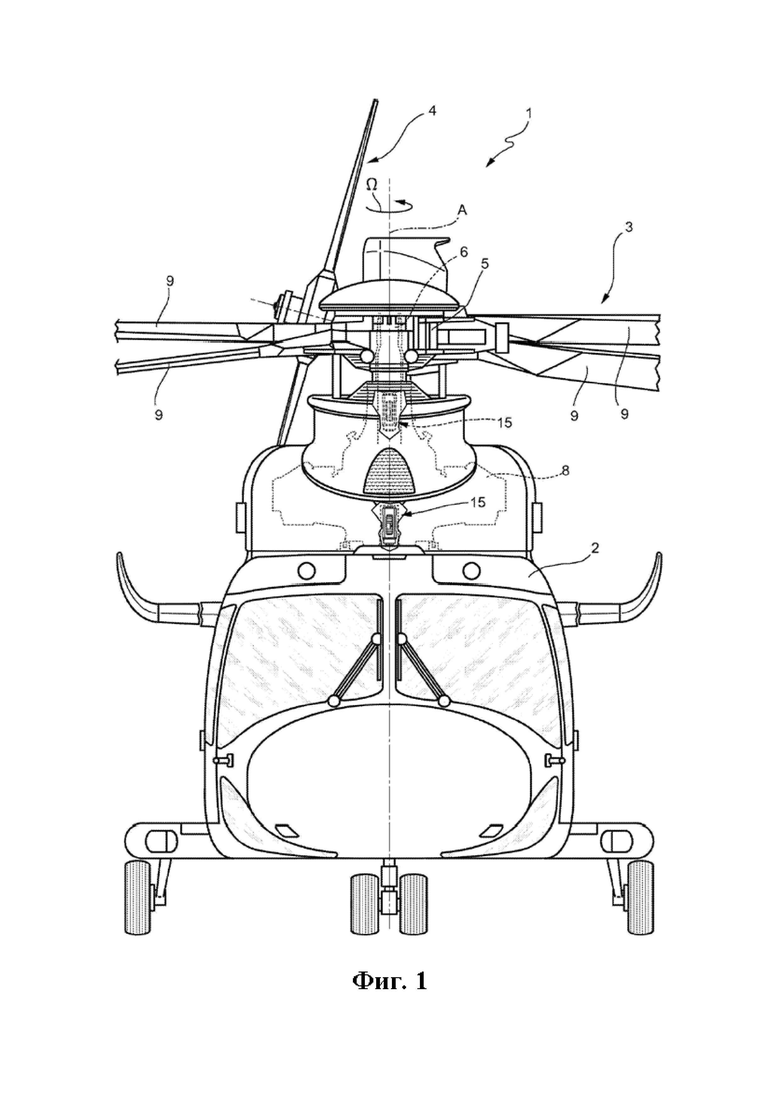
- Фигура 1 представляет собой вид спереди вертолета, содержащего винт согласно варианту выполнения настоящего изобретения, с частями, не полностью представленными для ясности;
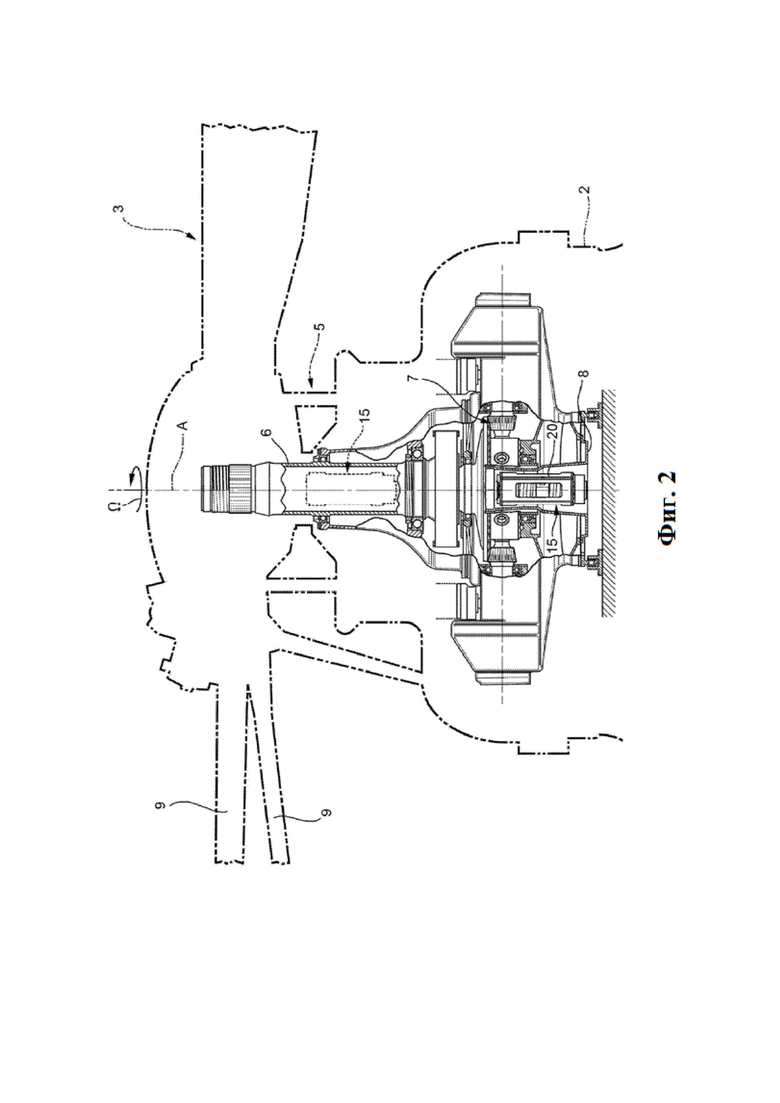
- Фигура 2 представляет собой вид спереди, в увеличенном масштабе, трансмиссионного кожуха винта на Фигуре 1;
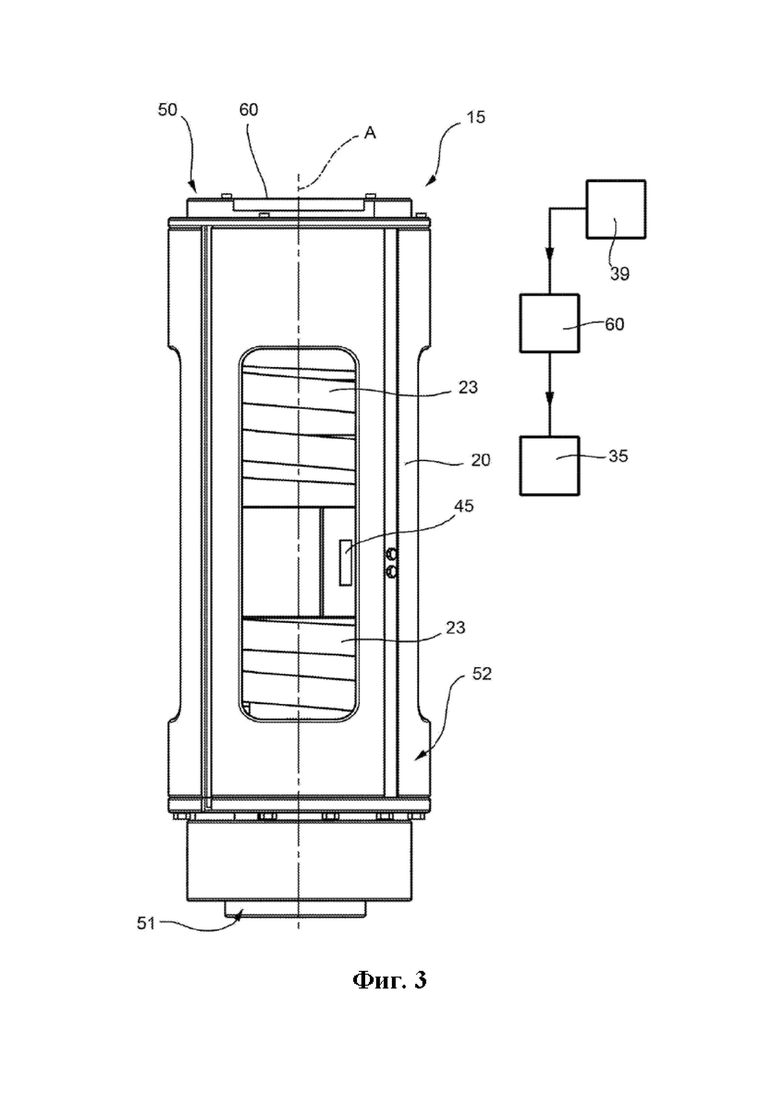
- Фигура 3 показывает, в увеличенном масштабе, поглощающее устройство на Фигуре 2; и
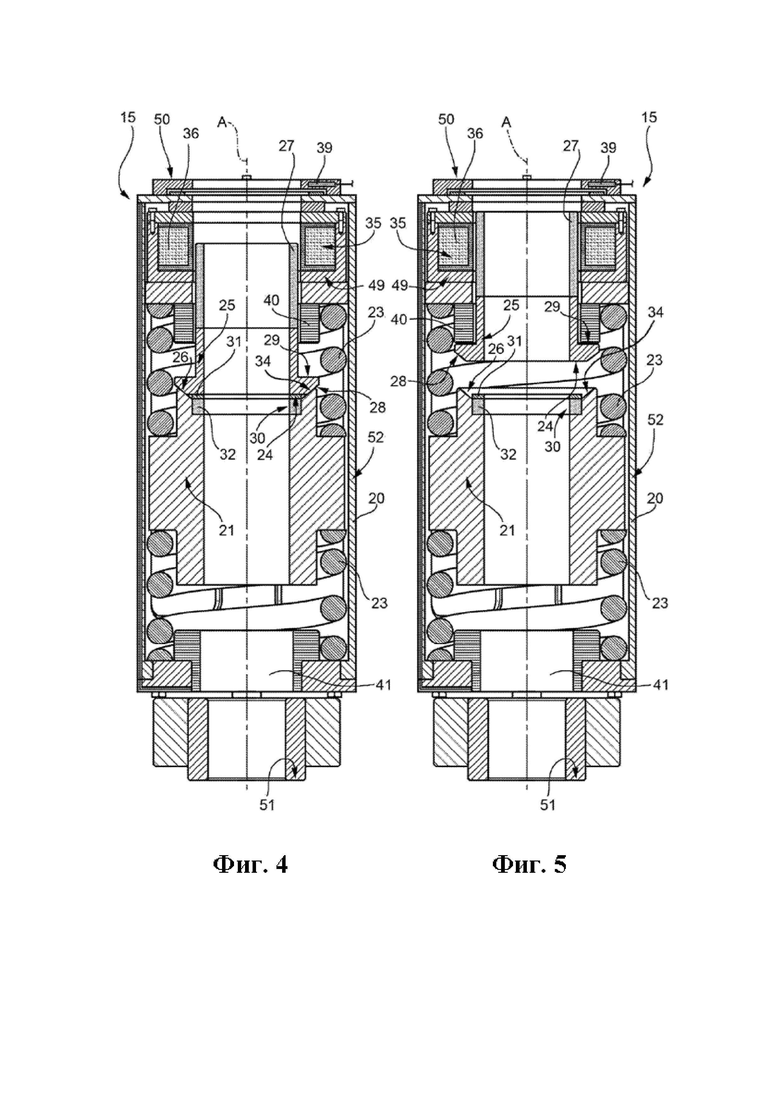
- Фигуры 4 и 5 показывают, в дополнительно увеличенном масштабе, поглощающее устройство на Фигурах 2 и 3 в соответствующих рабочих конфигурациях, используемых, когда угловая скорость вала несущего винта принимает, соответственно, первое и второе значение, отличные друг от друга.
ЛУЧШИЙ ВАРИАНТ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯ
Ссылаясь на Фигуру 1, ссылочная позиция 1 указывает способный к зависанию летательный аппарат, в частности, вертолет, в основном содержащий фюзеляж 2, несущий винт 3, расположенный наверху фюзеляжа 2 и вращающийся вокруг оси A, и рулевой винт 4, расположенный на конце фюзеляжа 2 и вращающийся вокруг своей оси, поперечной оси A.
Более подробно, винт 3 содержит полую втулку 5 с осью A, несущую группу консольно-установленных лопастей 9, которые продолжаются радиально оси A.
Ссылаясь на Фигуру 2, винт 3 также содержит вал 6 несущего винта, вращающийся вокруг оси A с угловой скоростью Ω относительно системы отсчета, выполненной за одно целое с фюзеляжем 2, угловым образом выполненный за одно целое со втулкой 5, и соединенный, не показанным образом, с силовым блоком, например, турбиной, переносимой вертолетом 1.
Винт 3 также содержит блок 7 передачи, выполненный с возможностью передавать движущую силу от силового блока к валу 6 несущего винта.
Подробно, блок 7 передачи содержит, в частности, статор 8, который является неподвижным относительно оси A.
Статор 8 соединен с фюзеляжем 2 известным образом, например, рулевой балкой и группой штанг, наклоненных относительно оси A.
Кроме того, силовой блок является выборочно управляемым, чтобы приводить во вращение вал 6 несущего винта, втулку 5, и лопасти 9 вокруг оси A:
- с угловой скоростью, Ω, равной номинальному значению Ω1, в нормальных рабочих условиях вертолета 1; или
- с угловой скоростью Ω, равной значению Ω2, отличному от номинального значения Ω1, в особых рабочих условиях вертолета 1.
В показанном случае значение Ω2 больше номинального значения Ω1.
Более конкретно, угловая скорость Ω2 равна приблизительно 102% от угловой скорости Ω1.
Вал 6 несущего винта частично вмещен внутри втулки 5 и угловым образом выполнен за одно целое с втулкой 5 (Фигура 2).
В частности, вал 6 несущего винта является полым.
Винт 3 также содержит устройство 15 поглощения вибраций для поглощения передачи вибраций к фюзеляжу 2 параллельно оси A. Другими словами, поглощающее устройство 15 поглощает осевые вибрации на вале 6 несущего винта.
В показанном случае поглощающее устройство 15 является пассивным и перестраиваемым.
Поглощающее устройство 15 также соосно оси A.
Поглощающее устройство 15 в основном содержит (Фигуры 3-5):
- кожух 20, продолжающийся вдоль оси A;
- груз 21, выполненный с возможностью скользить внутри кожуха 20 параллельно оси A; и
- упругие средства 22 для поддержки груза 21 скользящим образом вдоль оси A внутри кожуха 20.
Упругие средства 22 размещены между кожухом 20 и грузом 21, и имеют общую жесткость k параллельно оси A.
Более конкретно, кожух 20 содержит:
- пару осевых концевых стенок 50 и 51, по существу ортогональных оси A; и
- цилиндрическую стенку 52, продолжающуюся между стенками 50 и 51.
Упругие средства 22 содержат пару пружин 23, расположенных на соответствующих взаимно противоположных осевых сторонах груза 21, между грузом 21 и кожухом 20.
В показанном случае пружины 23 представляют собой спиральные пружины в “параллельной” конфигурации, т.е. они подвергаются такой же деформации во время колебательного движения. Из этого следует, что каждая пружина 23 имеет жесткость, равную k/2.
Одна из пружин 23 размещена между грузом 21 и стенкой 50 кожуха 20, а другая пружина 23 размещена между грузом 21 и стенкой 51 кожуха 20.
Предпочтительно, поглощающее устройство 15 также содержит:
- дополнительный груз 25, также скользящий внутри кожуха 20 параллельно оси A;
- соединительный элемент 30, который делает грузы 21 и 25 за одно целое подвижными вдоль оси A, когда угловая скорость Ω вала 6 несущего винта принимает значение Ω1 и
- исполнительное устройство 35, активируемое для разъединения грузов 21 и 25, относительно поступательного перемещения вдоль оси A, когда угловая скорость Ω вала 6 несущего винта принимает значение Ω2.
В показанном случае кожух 20 соединен со статором 8.
Альтернативно, кожух 20 вмещен внутри вала 6 несущего винта, как показано пунктирной линией на Фигуре 2. В этом варианте выполнения поглощающее устройство 15 также содержит токосъемное кольцо, выполненное с возможностью соединять источник питания, расположенный на борту фюзеляжа 2, с исполнительным устройством 35.
Когда угловая скорость Ω вала 6 несущего винта принимает значение Ω1, поглощающее устройство 15 ведет себя подобно настроеному поглотителю груза, имеющему груз, равный сумме грузов 21 и 25, и жесткость k вдоль оси A. Эти значения груза и жесткости определяют таким образом, что поглощающее устройство 15 настроено на угловую частоту, равную Ω1 и, поэтому поглощает передачу вибраций вдоль оси A с этой угловой частотой Ω1 к фюзеляжу 2.
И наоборот, когда угловая скорость Ω вала 6 несущего винта принимает значение Ω2, поглощающее устройство 15 ведет себя подобно настроенному поглотителю груза, имеющему груз, равный грузу 21 и жесткость k вдоль оси A. Эти значения грузов и жесткости определяют, таким образом, что поглощающее устройство 15 настроено на угловую частоту, равную Ω2 и, поэтому поглощает передачу вибраций вдоль оси A с этой угловой частотой Ω2 к фюзеляжу 2.
Более подробно, соединительный элемент 30 является магнитным. Более конкретно, грузы 21 и 25 выполнены из намагничиваемого материала, предпочтительно ферромагнитного.
Соединительный элемент 30 представляет собой постоянный магнит, прикрепленный к грузу 21.
В показанном случае соединительный элемент 30 выполнен с возможностью создавать первое магнитное поле, ориентированное параллельно оси A.
Соединительный элемент 30 также содержит пару дисков 31 и 32, соосных относительно оси A и прикрепленных к грузу 21.
Диски 31 и 32 определяют соответствующие взаимно противоположные полюсы постоянного магнита.
Груз 21 содержит (Фигуры 4 и 5) осевой конец 26, расположенный на стороне около стенки 50, принимающий соединительный элемент 30 неподвижным образом, и определяющий плечо 34, с формой усеченного конуса в показанном случае.
Груз 25 содержит осевой конец 24, противоположный стенке 50, и обращенный к осевому концу 26 груза 21.
Более конкретно, осевой конец 24 содержит:
- плечо 28, выполненное с возможностью упираться в плечо 34, когда угловая скорость Ω вала 6 несущего винта равна значению Ω1; и
- плечо 29, которое в осевом направлении противоположно плечу 28.
В показанном случае плечо 28 имеет форму усеченного конуса, а плечо 29 имеет форму плоского кольца.
В конфигурации, показанной на Фигурах 4 и 5, соединительный элемент 30 оказывает силу притяжения Fm на груз 25, которая направлена параллельно оси A и ориентирована в том же направлении, что и сила гравитации, от стенки 50 к стенке 51 (т.е. вниз на Фигурах 2-5).
Впоследствии, когда угловая скорость Ω вала 6 несущего винта принимает значение Ω1, груз 25 подвергается силе веса, силе Fm и внутренней силе. Соединительный элемент 30 и груз 25 имеют такое размеры, что результирующая вышеупомянутых сил оставляет груз 25 удерживаемым на грузе 21.
Исполнительное устройство 35 является выборочно управляемым для оказания силы Fa на груз 25, которая направлена параллельно оси A и ориентирована в противоположном направлении силе гравитации, от стенки 51 к стенке 50 (т.е. вверх на Фигурах 4 и 5).
Впоследствии, когда угловая скорость Ω вала 6 несущего винта принимает значение Ω2, груз 25 подвергается силе веса, силе Fm, внутренней силе и дополнительной силе Fa.
Исполнительное устройство 35 имеет такой размер, чтобы создавать силу Fa с таким значением, чтобы результирующая вышеупомянутых сил, оказываемых на груз 25, была направлена от стенки 51 к стенке 50, и в осевом направлении отделяет груз 25 от груза 21.
Более подробно, исполнительное устройство 35 является электромагнитным.
Более подробно, исполнительное устройство 35 содержит:
- генератор тока, который не показан;
- группу тороидальных электрических обмоток 36 (показана только схематично), имеющих кольцевую форму вокруг оси A; и
- генератор 27 магнитного поля, выполненный с возможностью создавать второе магнитное поле, ориентированное радиально оси A, и за одно целое определенное с грузом 25.
Более подробно, тороидальные электрические обмотки 36 вмещены внутри металлической арматуры 49 из ферромагнитного материала, прикрепленной к кожуху 20 и имеющей функцию ориентирования магнитного поля, созданного генератором 27.
Генератор 27, наоборот, является подвижным относительно кожуха 20, параллельно оси A.
Более конкретно, генератор 27 расположен на в осевом направлении противоположной части груза 25 относительно конца 28 груза 25.
Активация электрического генератора вызывает циркуляцию тока в электрических обмотках 36. Этот электрический ток циркулирует кольцевым образом относительно оси A и погружен во второе магнитное поле, радиальное оси A, созданное генератором 27 и связанное с ферромагнитным материалом арматуры 49.
За счет действия силы Лоренца и того, что электрические обмотки 36 неподвижны относительно оси A, сила Fa создается на грузе 25.
Поглощающее устройство 15 также содержит датчик 39 (показан только схематично на Фигурах 4 и 5), выполненный с возможностью создавать сигнал, связанный с угловой скоростью Ω вала 6 несущего винта и функционально соединенный с исполнительным устройством 35.
В показанном случае датчик 39 прикреплен к стенке 50 кожуха 20.
Поглощающее устройство 15 также содержит блок 60 управления, функционально соединенный с датчиком 39 и исполнительным устройством 35, как схематично показано на Фигуре 3.
Блок 60 управления, более подробно, запрограммирован на:
- деактивацию исполнительного устройства 35, когда датчик 39 обнаруживает, что угловая скорость Ω вала 6 несущего винта принимает значение Ω1 (Фигура 4), чтобы удерживать грузы 21 и 25 за одно целое друг с другом; и
- активацию исполнительного устройства 35, когда датчик 39 обнаруживает, что угловая скорость Ω вала 6 несущего винта принимает значение Ω2 (Фигура 5), чтобы отделять и разъединять грузы 21 и 25.
Поглощающее устройство 15 также содержит:
- пару концов перемещающих элементов 40 и 41, неподвижных относительно кожуха 20 и расположенных на соответствующих противоположных сторонах грузов 21 и 25, и выполненных с возможностью определять соответствующие взаимно противоположные концевые упоры для колебательного движения грузов 21 и 25; и
- удерживающий элемент 45 (Фигура 3), размещенный между кожухом 20 и грузом 21, и предназначенный для предотвращения вращения груза 21 вокруг оси A, следуя за скручиванием пружин 23 вокруг оси A.
В частности, конец перемещающих элементов 40 и 41 соответственно расположен на стороне стенок 50 и 51 относительно груза 21.
Когда угловая скорость Ω вала 6 несущего винта равна значению Ω1, а исполнительное устройство 35 таким образом деактивировано, конец перемещающих элементов 40 и 41 ограничивает совместное колебание грузов 21 и 25 параллельно оси A (Фигура 4).
Когда угловая скорость Ω вала 6 несущего винта равна значению Ω2, а исполнительное устройство 35 таким образом активировано, конец перемещающегося элемента 40 упирается в плечо 29 груза 25, останавливая перемещение от груза 21 в направлении, параллельном оси A (Фигура 5).
При использовании силовой блок приводит во вращение втулку 5, вал 6 несущего винта и лопасти 9 вокруг оси A посредством блока передачи 7.
Описана работа вертолета 1, начиная от условия, в котором вал 6 несущего винта вращается вокруг оси A с угловой скоростью Ω, равной номинальному значению Ω1, со ссылкой на систему отсчета, выполненную за одно целое с фюзеляжем 2.
Вращение втулки 5 и лопастей 9 создает вибрации, которые передаются к валу 6 несущего винта, а оттуда к фюзеляжу 2 вертолета 1.
Эти вибрации в основном имеют угловые частоты, равные N*Ω1 относительно неподвижной системы фюзеляжа.
Передача этих вибраций к фюзеляжу 2 поглощается поглощающим устройством 15.
Более подробно, датчик 39 обнаруживает угловую скорость Ω, как равную значению Ω1 вала 6 несущего винта, а блок 60 управления удерживает исполнительное устройство 35 деактивированным. В этих обстоятельствах в обмотках 36 не циркулирует электрический ток.
Груз 25 удерживается в контакте с грузом 21 постоянным магнитом соединительного элемента 30.
Более конкретно, груз 25 подвергается силе веса, силе Fm, оказываемой магнитом соединительного элемента 30, и внутренней силе за счет своего собственного колебательного движения вдоль оси A. Эти силы имеют результирующую, ориентированную так, чтобы удерживать грузы 21 и 25 в контакте друг с другом.
В этих условиях грузы 21 и 25 и генератор 27 колеблются за одно целое друг с другом вдоль оси A и упруго поддерживаются пружинами 23 в их колебательном движении вдоль оси A.
Впоследствии поглощающее устройство 15 ведет себя подобно настроенному поглотителю груза, имеющего груз, равный сумме грузов 21 и 25, и жесткость k вдоль оси A. Эти значения груза и жесткости определяют таким образом, что поглощающее устройство 15 настроено на угловую частоту, равную Ω1. Поглощающее устройство 15, таким образом, эффективно поглощает передачу вибраций вдоль оси A с этой угловой частотой Ω1 к фюзеляжу 2.
Колебание грузов 21 и 25 вдоль оси A ограничено концом перемещающих элементов 40 и 41 на стороне стенки 50 и стенки 51, соответственно.
Случайное вращение грузов 21 и 25 вокруг оси A предотвращается удерживающим элементом 45.
В особых условиях полета вертолета 1 силовой блок приводит во вращение вал 6 несущего винта вокруг оси A с угловой скоростью Ω, равной значению Ω2, со ссылкой на систему отсчета, составляющую одно целое с фюзеляжем 2.
Вибрации, созданные механическими и аэродинамическими нагрузками, связанными с вращением вала 6 несущего винта и втулки 5, в основном имеют угловые частоты, равные N*Ω2, относительно неподвижной системы отсчета фюзеляжа.
В этих условиях датчик 39 обнаруживает угловую скорость Ω, равную значению Ω2 вала 6 несущего винта, а блок 60 управления активирует исполнительное устройство 35 так, чтобы вызывать циркуляцию электрического тока в обмотках 36 и, тем самым создавать силу Fa на грузе 25.
Более конкретно, электрический ток, циркулирующий в обмотках 36 кольцевым образом к оси A, взаимодействует со вторым магнитным полем, созданным постоянным магнитом генератора 27.
Поскольку это магнитное поле ориентировано радиально оси A, параллельно оси A создается сила Лоренца, равная силе Fa между обмотками 36 и грузом 25, несущим постоянный магнит генератора 27.
Таким образом, груз 25 подвергается силе веса, силе Fm, оказываемой магнитом соединительного элемента 30, и силе Fa.
Результирующая этих сил заставляет груз 25 перемещаться от груза 21 параллельно оси A до достижения условия (Фигура 5), в котором плечо 29 груза 25 упирается в конец перемещающего элемента 40.
Эти силы имеют результирующую, ориентированную от стенки 51 к стенке 50 в направлении, противоположном силе гравитации. Впоследствии эта результирующая удерживает грузы 21 и 25 отделенными друг от друга и удерживает груз 21 в контакте с исполнительным устройством 35.
Поглощающее устройство 15, таким образом, ведет себя подобно настроенному поглотителю груза, имеющему груз, равный грузу 21, и жесткости k вдоль оси A. Эти значения груза и жесткости определяют таким образом, что поглощающее устройство 15 настроено на угловую частоту, равную Ω2, и поэтому поглощает передачу вибраций вдоль оси A с угловой частотой Ω2 к фюзеляжу 2.
Колебание груза 21 вдоль оси A ограничено плечом 28 груза 25 на боковой стенке 50 и концом перемещающего элемента 41 на стороне стенки 51.
Удерживающий элемент 45 обеспечивает то, что груз 21 не может вращаться вокруг оси A во время колебательного движения вдоль оси A, например, за счет случайного скручивания пружин 23.
Из исследования свойств винта 3 согласно настоящему изобретению, очевидны преимущества, которые могут быть достигнуты с его помощью.
В частности, груз 25 поглощающего устройства 15 за одно целое подвижен с грузом 21 при колебательном движении вдоль оси A, когда угловая скорость Ω вала 6 несущего винта равна номинальному значению Ω1. И наоборот, груз 25 поглощающего устройства 15 отделен и разъединен от груза 21, когда угловая скорость Ω вала 6 несущего винта равна значению Ω2, отличному от номинального значения Ω1.
Впоследствии поглощающее устройство 15 ведет себя подобно настроенному поглотителю груза, имеющего груз, равный сумме грузов 21 и 25, и жесткость k вдоль оси A, когда вал 6 несущего винта и лопасти 9 вращаются при угловой скорости Ω1, равной номинальному значению. В этом условии поглощающее устройство 15 настроено на угловую частоту Ω1 и поэтому способен эффективно поглощать передачу вибраций с угловой частотой Ω1 к фюзеляжу 2, повышая комфорт пассажира.
И наоборот, поглощающее устройство 15 ведет себя подобно настроенному поглотителю груза, имеющего груз, равный только грузу 21, и жесткости k вдоль оси A, когда вал 6 несущего винта и лопасти 9 вращаются при угловой скорости Ω2, отличной от номинального значения. В этом условии поглощающее устройство 15 настроено на угловую частоту Ω2 и поэтому способно эффективно поглощать передачу вибраций с угловой частотой Ω2 к фюзеляжу 2, повышая комфорт пассажира даже когда винт 3 вращается при угловой скорости Ω2, большей номинального значения.
Соединительный элемент 30 эффективно удерживает грузы 21 и 25, удерживаемые друг с другом за одно целое относительно колебания вдоль оси A, когда вал 6 несущего винта и лопасти 9 вращаются при угловой скорости Ω1, равной номинальному значению.
Исполнительное устройство 35 эффективно для оказания силы Fa на груз 25, чтобы преодолевать действие силы Fm, оказываемой соединительным элементом 30, когда датчик 39 обнаруживает, что вал 6 несущего винта и лопасти 9 вращаются при угловой скорости Ω2, отличной от номинального значения.
Конец перемещающих элементов 40 и 41 определяет соответственные взаимно противоположные упорные поверхности для колебательного движения грузов 21 и 25, когда угловая скорость Ω равна значению Ω1, а исполнительное устройство 35 деактивировано.
Конец перемещающего элемента 40 в осевом направлении удерживает груз 25 и по существу предотвращает осевое колебание, когда угловая скорость Ω равна значению Ω1, а исполнительное устройство 35 деактивировано.
Удерживающий элемент 45 эффективно предотвращает вращение груза 21 вокруг оси A, вызванное, например, скручиванием пружин 23.
Наконец, ясно, что модификации и варианты могут быть выполнены относительно винта 3, описанного и проиллюстрированного в настоящем документе, без отклонения от объема, определенного формулой изобретения.
В частности, винт 3 может также содержать группу дополнительных грузов 25, выборочно выполненных с возможностью соединяться с грузом 21, когда угловая скорость Ω вала 6 несущего винта равна дополнительным соответствующим значениям, чтобы настраивать поглощающее устройство 15 на соответствующие дополнительные значения.
Вместо использования в вертолете 1, винт 3 может быть использован на конвертоплане или винтокрыле или комбинированном вертолете.
Кроме того, винт 3 может содержать дополнительное поглощающее вибрации устройство 15 для поглощения передачи вибраций к фюзеляжу 2 в плоскости, ортогональной оси A, т.е. связанной с изгибными вибрациями вала 6 несущего винта.
Наконец, винт согласно настоящему изобретению может быть рулевым винтом 4 вертолета 1 вместо несущего винта 3.
Винт (3) для способного к зависанию летательного аппарата (1) содержит втулку (5), вращающуюся вокруг оси (A), содержащую группу (9) лопастей, вал (6) несущего винта, выполненный с возможностью соединяться с силовым блоком летательного аппарата (1) и функционально соединенный с втулкой (5) для приведения во вращение втулки (5) вокруг оси (A), и поглощающее устройство (15) для поглощения передачи вибраций от вала (6) несущего винта к летательному аппарату (1) параллельно указанной (A). Поглощающее устройство (15) содержит кожух (20), первый груз (21), свободный для колебания параллельно указанной оси (A) относительно кожуха (20) и упругосоединенный с кожухом (20), второй груз (25), свободный для колебания параллельно указанной оси (A), соединительные средства (30), выполненные с возможностью перемещать первый и второй грузы (21, 25) за одно целое вдоль указанной оси (A), когда угловая скорость (Ω) вала (6) несущего винта принимает первое значение (Ω1), и средства (35) исполнительных устройств для разъединения первого и второго грузов (21, 25), когда угловая скорость (Ω) вала (6) несущего винта принимает второе значение (Ω2), отличное от первого значения (Ω1). Обеспечивается возможность поглощения осевых вибраций винта при разных угловых скоростях пассивными поглотителями. 2 н. и 15 з.п. ф-лы, 5 ил.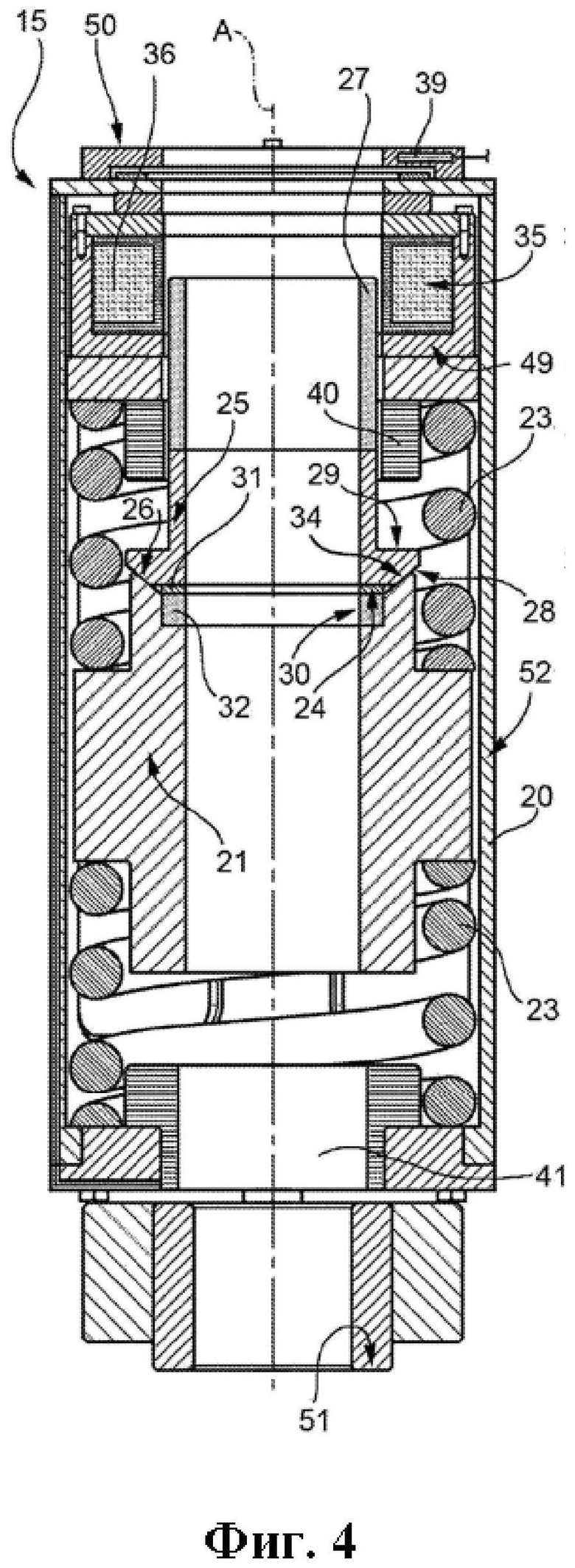
1. Винт (3) для способного к зависанию летательного аппарата (1), включающий
втулку (5), вращающуюся вокруг оси (A) и, в свою очередь, включающую группу лопастей (9);
вал (6) несущего винта, выполненный с возможностью соединяться с силовым блоком указанного летательного аппарата (1) и функционально соединенный с указанной втулкой (5) для приведения во вращение указанной втулки (5) вокруг указанной оси (A); и
поглощающее устройство (15) для поглощения передачи вибраций от указанного вала (6) несущего винта к указанному летательному аппарату (1) параллельно указанной оси (A);
причем указанное поглощающее устройство (15), в свою очередь, содержит:
кожух (20);
первый груз (21), свободно колеблющийся параллельно указанной оси (A) относительно указанного кожуха (20) и упругосоединенный с указанным кожухом (20);
отличающийся тем, что указанное поглощающее устройство (15) является пассивным и дополнительно содержит
второй груз (25);
соединительные средства (30), выполненные с возможностью делать перемещение указанного первого и второго грузов (21, 25) за одно целое вдоль указанной оси (A), когда угловая скорость (Ω) указанного вала (6) несущего винта принимает первое значение (Ω1); и
средство (35) исполнительного устройства, активируемое для разъединения и отделения указанного первого и второго грузов (21, 25) относительно поступательного перемещения вдоль указанной оси (A), когда указанная угловая скорость (Ω) указанного вала (6) несущего винта принимает второе значение (Ω2), отличное от указанного первого значения (Ω1).
2. Винт по п. 1, отличающийся тем, что указанные соединительные средства (30) являются соединительными средствами магнитного типа и выполнены с возможностью соединять указанный первый и второй грузы (21, 25) вместе с первым значением первой силы (Fm).
3. Винт по п. 2, отличающийся тем, что указанные соединительные средства (30) включают постоянный магнит, удерживаемый на указанном первом грузе (21).
4. Винт по любому из предыдущих пунктов, отличающийся тем, что указанные средства (35) исполнительного устройства включают электромагнитное исполнительное устройство, которым управляют, чтобы оказывать второе значение (Fa) второй силы на указанный второй груз (25), когда указанная угловая скорость (Ω) указанного вала (6) несущего винта принимает указанное второе значение (Ω2).
5. Винт по п. 4, отличающийся тем, что указанная первая и вторая силы противоположны друг другу;
причем указанное первое и второе значения (Fm, Fa) таковы, чтобы поддерживать, при использовании, указанный второй груз (25) за одно целое с указанным первым грузом (21), когда указанная угловая скорость (Ω) принимает указанное первое значение (Ω1), и отделять, при использовании, указанный второй груз (25) от указанного первого груза (21), когда указанная угловая скорость (Ω) принимает указанное второе значение (Ω2).
6. Винт по п. 4 или 5, отличающийся тем, что указанное исполнительное устройство (35) включает
группу электрических проводников (36), расположенных кольцевым образом вокруг указанной оси (A) и внутри которых электрический ток может выборочно циркулировать; и
генератор (27), выполненный с возможностью создавать магнитное поле, радиальное указанной оси (A), в частности постоянный магнит;
причем указанный второй груз (25) определяет указанный генератор (27).
7. Винт по любому из предыдущих пунктов, отличающийся тем, что указанное поглощающее устройство (15) дополнительно включает датчик (39), выполненный с возможностью создавать сигнал, связанный со скоростью вращения указанного вала (6) несущего винта;
причем указанное средство (35) исполнительного устройства выполнено с возможностью быть управляемым на основе указанного сигнала.
8. Винт по любому из предыдущих пунктов, отличающийся тем, что указанное поглощающее устройство (15) дополнительно включает
по меньшей мере одну пружину (23), размещенную между указанным кожухом (21) и указанным первым грузом (21); и
противоповоротное устройство (45), размещенное между указанной пружиной (23) и указанным первым грузом (21) и выполненное с возможностью предотвращать вращение указанного первого груза (21) вокруг указанной оси (A).
9. Винт по любому из предыдущих пунктов, отличающийся тем, что он включает первый конец (40) перемещающего устройства и второй конец (41) перемещающего устройства, выполненные с возможностью соответственно ограничивать перемещение указанного первого груза (21) и второго груза (25) за одно целое друг с другом, когда угловая скорость (Ω) указанного вала (6) несущего винта принимает, при использовании, указанное первое значение (Ω1);
причем указанный первый конец перемещающего устройства (40) расположен в упоре к указанному второму грузу (25), в осевом направлении разнесенному от указанного первого груза (21), когда угловая скорость (Ω) указанного вала (6) несущего винта принимает, при использовании, указанное второе значение (Ω2).
10. Винт по любому из предыдущих пунктов, отличающийся тем, что указанное поглощающее устройство (15) угловым образом выполнено за одно целое с указанным валом (6) несущего винта.
11. Винт по п. 10, отличающийся тем, что указанный вал (6) несущего винта является полым и что указанное поглощающее устройство (15) вмещено внутри указанного вала (6) несущего винта.
12. Винт по любому из пп. 1-9, отличающийся тем, что указанное поглощающее устройство (15) угловым образом неподвижно по отношению к указанной оси (A).
13. Винт по п. 12, отличающийся тем, что он включает статор (8), поддерживающий указанный вал (6) несущего винта вращающимся образом вокруг указанной оси (A);
причем указанное поглощающее устройство (15) прикреплено к указанному статору (8).
14. Винт по любому из предыдущих пунктов, отличающийся тем, что указанные первый и второй грузы (21, 25) включают соответствующие осевые концы (26, 28), обращенные друг к другу, и совпадающие по форме;
причем указанный осевой конец (26) указанного первого груза (21) дополнительно вмещает указанные соединительные средства (30).
15. Винт по любому из предыдущих пунктов, отличающийся тем, что указанный кожух (20) включает первую концевую стенку (50) и вторую концевую стенку (51), которые по существу ортогональны указанной оси (A), и цилиндрическую стенку (52), продолжающуюся между указанной первой концевой стенкой (50) и указанной второй концевой стенкой (51);
причем указанный первый груз (21) содержит первый осевой конец (26), расположенный на стороне рядом с указанной первой концевой стенкой (50), принимающий указанные соединительные средства (30) неподвижным образом, и определяющий плечо (34);
причем указанный второй груз (25) содержит второй осевой конец (24), противоположный указанной первой концевой стенке (50) и обращенный к первому осевому концу (26) указанного первого груза (21).
16. Винт по пп. 8-15, отличающийся тем, что указанное поглощающее устройство (15) дополнительно включает
первый конец перемещающего устройства (40) и второй конец перемещающего устройства (41), выполненные с возможностью соответственно ограничивать перемещение указанного первого груза (21) и указанного второго груза (25) за одно целое друг с другом, когда угловая скорость (Ω) указанного вала (6) несущего винта принимает, при использовании, указанное первое значение (Ω1);
причем указанный первый конец перемещающего устройства (40) расположен в упоре к указанному второму грузу (25), в осевом направлении разнесенному от указанного первого груза (21), когда угловая скорость (Ω) указанного вала (6) несущего винта принимает, при использовании, указанное второе значение (Ω2);
причем указанные первый и второй конец перемещающих устройств (40, 41) неподвижны относительно указанного кожуха (20) и расположены на соответствующих противоположных сторонах указанного первого и второго грузов (21, 25);
причем указанное противоповоротное устройство (45) дополнительно выполнено с возможностью предотвращать вращение указанного второго груза (25) вокруг указанной оси (A).
17. Способный к зависанию летательный аппарат (1), отличающийся тем, что он включает
фюзеляж (2); и
винт (3) по любому из предыдущих пунктов;
причем указанный фюзеляж (2) соединен прямым или косвенным образом с указанным кожухом (20) указанного поглощающего устройства (15).
| US 20130011260 A1, 10.01.2013 | |||
| JP 2009138893 A, 25.06.2009 | |||
| US 20100296930 A1, 25.11.2010 | |||
| ВИНТ ПРИСПОСОБЛЕННОГО К ЗАВИСАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА, СОДЕРЖАЩИЙ УСТРОЙСТВО ДЕМПФИРОВАНИЯ ВИБРАЦИИ | 2014 |
|
RU2652491C2 |
| Способ контроля в производстве фенолов | 1951 |
|
SU95771A1 |
