Область техники изобретения
Изобретение относится к управлению регулятором скорости, отвечающим за электропитание электрического устройства, такого как, например, электродвигатель.
Уровень техники
Согласно топологии мощности, высокое напряжение подается регулятором скорости при последовательном подключении определенного числа преобразователей низкого напряжения (которые далее называются силовыми элементами, «power cell» по-английски). Управление силовыми элементами позволяет подавать напряжение нескольких уровней, или многоуровневое, причем каждый силовой элемент добавляет напряжение, позволяющее достигать последовательных уровней напряжений.
Под низким напряжением согласно европейским стандартам понимают напряжения, составляющие 0-1000 вольт в режиме переменного напряжения и 0-1500 вольт в режиме постоянного напряжения. Под высоким напряжением понимают напряжения более 1000 вольт в режиме переменного напряжения и более 1500 вольт в режиме постоянного напряжения.
Например, регулятор скорости может включать в себя N силовых элементов, где N больше или равно 1. Когда регулятор скорости подает трехфазное питание, он включает в себя 3*N силовых элементов, причем N силовых элементов выделены для каждой из трех фаз.
На практике часто бывает, что N силовых элементов на каждой фазе не нужно для генерирования требуемого напряжения.
На самом деле, уровень напряжения, прикладываемого к двигателю, примерно пропорционален скорости двигателя. Таким образом, при низкой скорости, напряжение достаточно слабое по сравнению с максимальным напряжением, которое можно подавать, когда N силовых элементов активны и работают на полную мощность. Таким образом, каждый из N элементов подает низкое напряжение, что все-таки приводит к износу компонентов силовых элементов, что подчеркивает влияние недостатков силовых каскадов, и, таким образом, функционирование системы питания является худшим, чем оптимальное.
Кроме того, в определенных применениях требуется непрерывность питания. Таким образом, в случае неисправности одного или нескольких силовых элементов могут быть установлены обходные (или «байпасные» по-английски) пути вокруг одного или нескольких неисправных силовых элементов.
Кроме того, когда на выходе регулятора скорости требуется повышенное напряжение, в конфигурации с N силовых элементов обход одного из них приводит к потере уровня напряжения, и поэтому система функционирует в аварийном режиме работы и не может выдавать полное напряжение.
Чтобы преодолеть этот недостаток, может быть предусмотрено определение конфигураций «N+1» или «N+2», которые состоят в добавлении дополнительных силовых элементов, которые не используются при нормальном функционировании и которые приводятся в действие при неисправности одного или двух силовых элементов с тем, чтобы система питания всегда могла подавать полное напряжение.
Таким образом, существует потребность в оптимизации использования силовых элементов регулятора скорости, отвечающей за питание электрического устройства, такого как электродвигатель.
Настоящее изобретение преодолевает вышеупомянутые недостатки.
Сущность изобретения
Первый аспект изобретения относится к способу управления регулятором скорости, подающим электропитание на электродвигатель, причем регулятор скорости содержит множество из по меньшей мере Ni силовых элементов низкого напряжения, соединенных последовательно для по меньшей мере одной фазы с индексом i, причем способ включает:
после приема команды скорости, определение числа Mi элементов, достаточного для питания двигателя целевым напряжением V, которое определяют на основе команды скорости;
активацию Mi силовых элементов из Ni силовых элементов и деактивацию Ni-Mi других силовых элементов для питания двигателя в соответствии с командой скорости.
Таким образом, в отличие от решений согласно уровню техники, число активных силовых элементов не является фиксированным, что демонстрирует преимущество, состоящее в возможности адаптировать число активных силовых элементов к выходному напряжению регулятора скорости, который подает питание на электродвигатель. Это демонстрирует преимущества, связанные со снижением потерь силовых элементов, с улучшением термического состояния регулятора скорости, с повышением защиты двигателя при перенапряжении и со снижением влияния недостатков силового каскада на целевое выходное напряжение.
Ni силовых элементов могут соответствовать фазе i трехфазного электропитания, а другие фазы могут включать в себя то же число Ni силовых элементов. В качестве варианта, число Ni силовых элементов регулятора скорости различается.
Согласно варианту воплощения регулятор скорости включает в себя несколько фаз, причем каждая фаза с индексом j имеет Nj силовых элементов, а число Mi для фазы с индексом i может быть ниже минимального из значений Nj, при j, изменяющемся от 1 до числа фаз регулятора скорости.
Такой вариант воплощения позволяет обеспечивать равновесные напряжения между различными фазами регулятора скорости.
Кроме того, каждый силовой элемент может быть пригодным для обеспечения выходного напряжения ниже максимального значения Vmax, причем способ содержит определение, исходя из команды скорости, целевого выходного напряжения V регулятора скорости, и Mi таково, что Mi*Vmax≥V.
Таким образом, число Mi позволяет обеспечивать подачу желаемого выходного напряжения.
Кроме того, Mi может представлять собой такое наименьшее целое число, что Mi*Vmax≥V.
Таким образом, активируется минимальное число силовых элементов, требуемых для обеспечения желаемого выходного напряжения, и поэтому использование регулятора скорости также оптимизируется.
Согласно варианту воплощения, перед приемом команды скорости, способ может включать в себя предыдущую стадию, на котором активируют число Ki силовых элементов для питания двигателя, причем Ki меньше или равно Ni, и Ki отлично от Mi;
Причем, если Ki больше Mi, то Ki-Mi силовые элементы могут быть отключены для питания двигателя в соответствии с командой скорости;
в противном случае, Mi-Ki силовых элементов активируют для питания двигателя в соответствии с командой скорости.
Этот вариант воплощения, таким образом, позволяет оптимизировать функционирование регулятора скорости в зависимости от приема команды скорости.
Согласно варианту воплощения, если │Mi-Ki│≥2, то │Mi-Ki│ силовых элементов могут быть активированы/деактивированы друг за другом.
Такие последовательные и не одновременные операции по активации/деактивации позволяют постепенно повышать/понижать напряжение на двигателе, минимизируя риски перенапряжения после переключения разъединителя для активации/деактивации силового элемента.
Согласно варианту воплощения, способ может дополнительно включать в себя передачу управляющих сигналов Mi активных силовых элементов, а для каждого активного силового элемента управляющий сигнал включает в себя команды переключения определенных разъединителей H-моста силового элемента, и каждый управляющий сигнал генерируется из треугольного сигнала и значения опорного управляющего напряжения.
Кроме того, согласно первому варианту воплощения в ходе предыдущей стадии используют Ki треугольных сигналов, смещенных по фазе друг относительно друга на 2π/Ki, для генерирования соответствующих управляющих сигналов, эквивалентных соответствующим значениям Vreft опорных управляющих напряжений, где t изменяется от 1 до Ki.
Вслед за приемом команды скорости используют Mi треугольных сигналов, смещенных по фазе друг относительно друга на 2π/Mi, для генерирования соответствующих управляющих сигналов, эквивалентных новым соответствующим значениям Vreft опорных управляющих напряжений, где t изменяется от 1 до Ki, причем новые значения определяют на основе команды скорости.
Термин «эквивалентный» означает, что каждое из значений опорных управляющих напряжений сопоставляют с одним из треугольных сигналов, для определения управляющих сигналов, которые позволяют переключать разъединители H-моста силового элемента. Такое сопоставление будет лучше понято ввиду разъяснений, приведенных ниже со ссылкой на фигуры 4 и 5.
Первый вариант воплощения позволяет адаптировать число активных силовых элементов к требуемому напряжению, с минимизацией гармонического спектра напряжения на выходе регулятора скорости.
В качестве варианта, согласно второму варианту воплощения, если Ki больше Mi:
в ходе предыдущей стадии используют Ki треугольных сигналов, смещенных по фазе друг относительно друга на 2π/Ki, для генерирования соответствующих управляющих сигналов, эквивалентных соответствующим значениям Vreft опорных управляющих напряжений, где t изменяется от 1 до Ki;
вслед за приемом команды скорости используют Ki треугольных сигналов, смещенных по фазе друг относительно друга на 2π/Ki, для генерирования соответствующих управляющих сигналов, эквивалентных новым соответствующим значениям Vreft опорных управляющих напряжений, где i изменяется от 1 до Ki, причем Ki-Mi новых значений Vreft устанавливают равными нулю. Это равносильно деактивации Ki-Mi силовых элементов, при установке их коэффициентов заполнения на ноль.
Второй вариант воплощения является более быстрым и легким в осуществлении, чем первый вариант воплощения, за счет характеристик напряжения на выходе регулятора скорости.
Согласно варианту воплощения регулятор скорости может включать в себя для каждого силового элемента разъединитель, выполненный с возможностью подключения и отключения силового элемента из последовательности силовых элементов, причем разъединитель активного силового элемента разомкнут, а разъединитель неактивного силового элемента замкнут.
Таким образом, силовые элементы можно активировать и деактивировать посредством обходного (или «байпасного» по-английски) разъединителя.
Согласно варианту воплощения, способ может дополнительно включать в себя выбор Mi силовых элементов из Ni силовых элементов в зависимости от заданного критерия и активацию Mi выбранных силовых элементов.
Таким образом, использование регулятора скорости и, в частности, силовых элементов, оптимизируется.
Кроме того, каждый из по меньшей мере Ni силовых элементов может быть связан со счетчиком, измеряющим время функционирования силового элемента, и заданный критерий может зависеть от соответствующего времени функционирования силовых элементов.
Таким образом, износ/время функционирования силовых элементов контролируются согласно изобретению.
Кроме того, Mi силовые элементы можно выбрать так, чтобы можно было снизить стандартное отклонение между временем функционирования силовых элементов.
Таким образом, обеспечивается равномерный износ силовых элементов, а следовательно, повышение срока службы регулятора скорости.
Второй аспект изобретения относится к компьютерной программе, исполняемой вычислительным устройством и содержащей команды для осуществления этапов способа согласно первому аспекту изобретения при ее исполнении вычислительным устройством.
Третий аспект изобретения относится к управляющему устройству регулятора скорости, подающему питание на электродвигатель, причем регулятор скорости включает в себя множество из по меньшей мере Ni силовых элементов низкого напряжения, соединенных последовательно для по меньшей мере одной фазы с индексом i, причем управляющее устройство содержит:
интерфейс, предназначенный для приема команды скорости;
вычислительное устройство, предназначенное для определения числа Mi элементов, достаточного для питания двигателя напряжением, определяемым на основе команды скорости;
причем активация Mi силовых элементов из Ni силовых элементов и деактивация Ni-Mi других силовых элементов для питания двигателя происходит в соответствии с командой скорости.
Согласно варианту воплощения, устройство может включать в себя процессор цифровых сигналов, содержащий интерфейс для приема команды скорости, причем процессор цифровых сигналов дополнительно управляет программируемой печатной платой, при этом соответствующие выходы программируемой печатной платы соединены с Ni силовыми элементами, а управляющие сигналы можно передавать на элементы управления Mi активных силовых элементов.
Краткое описание фигур:
Лишь в качестве примера варианты воплощения изобретения будут описаны со ссылкой на чертежи, на которых:
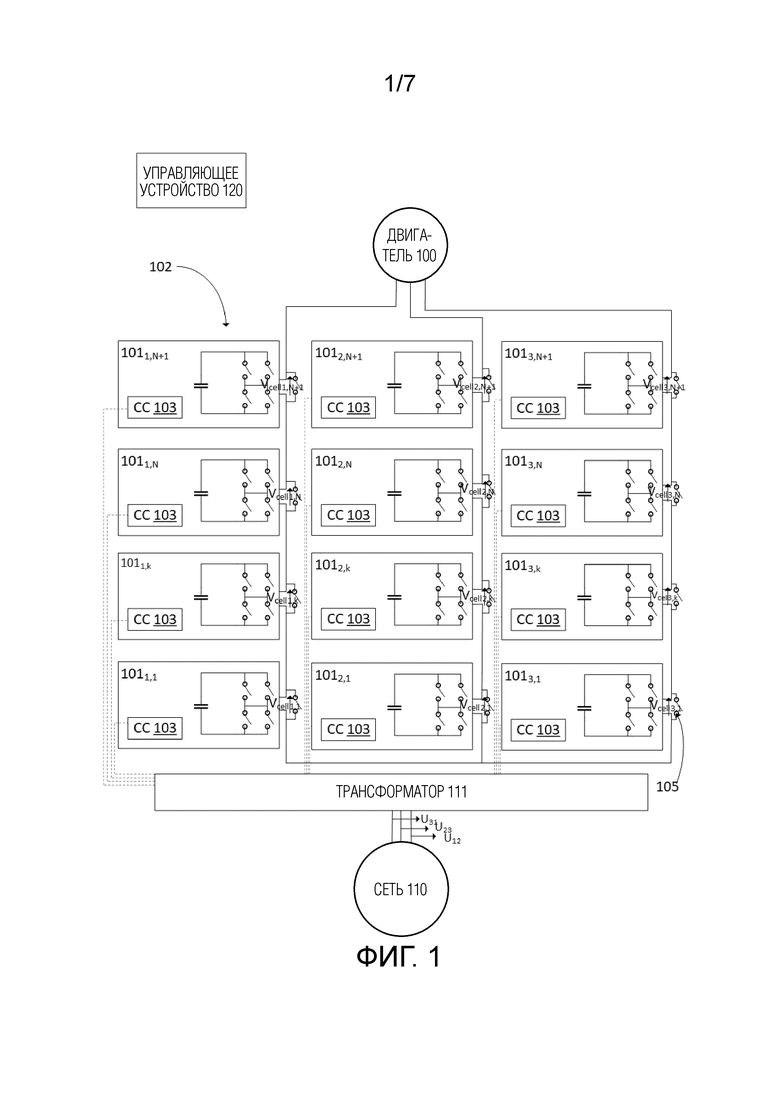
фигура 1 иллюстрирует систему управления питанием электродвигателя согласно варианту воплощения изобретения;
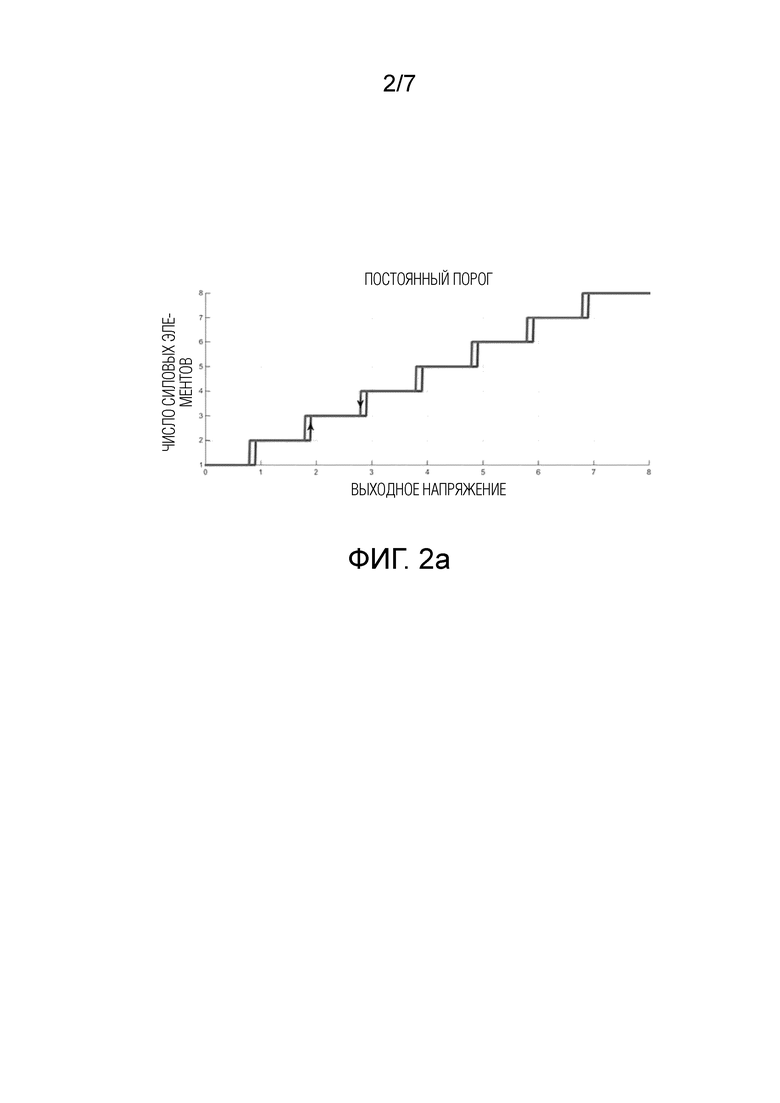
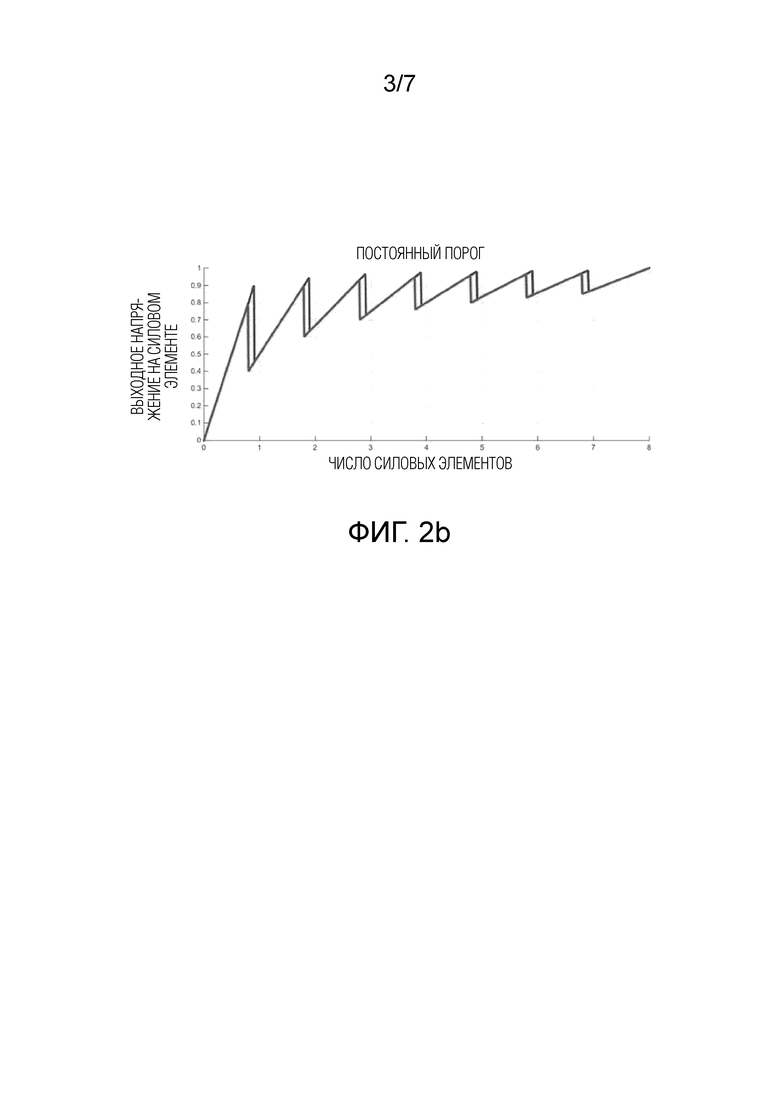
фигуры 2a и 2b демонстрируют изменение числа активных силовых элементов в зависимости от желаемого выходного напряжения регулятора скорости и в зависимости от выходного напряжения силового элемента;
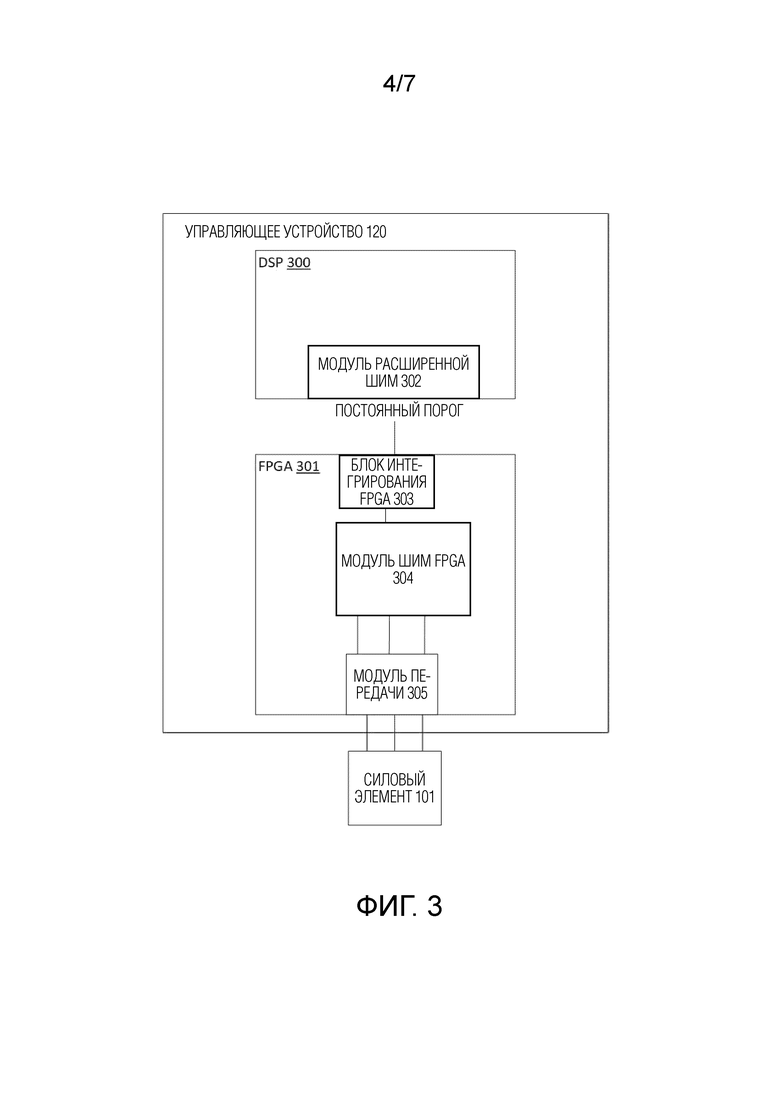
фигура 3 иллюстрирует структуру управляющего устройства согласно варианту воплощения изобретения;
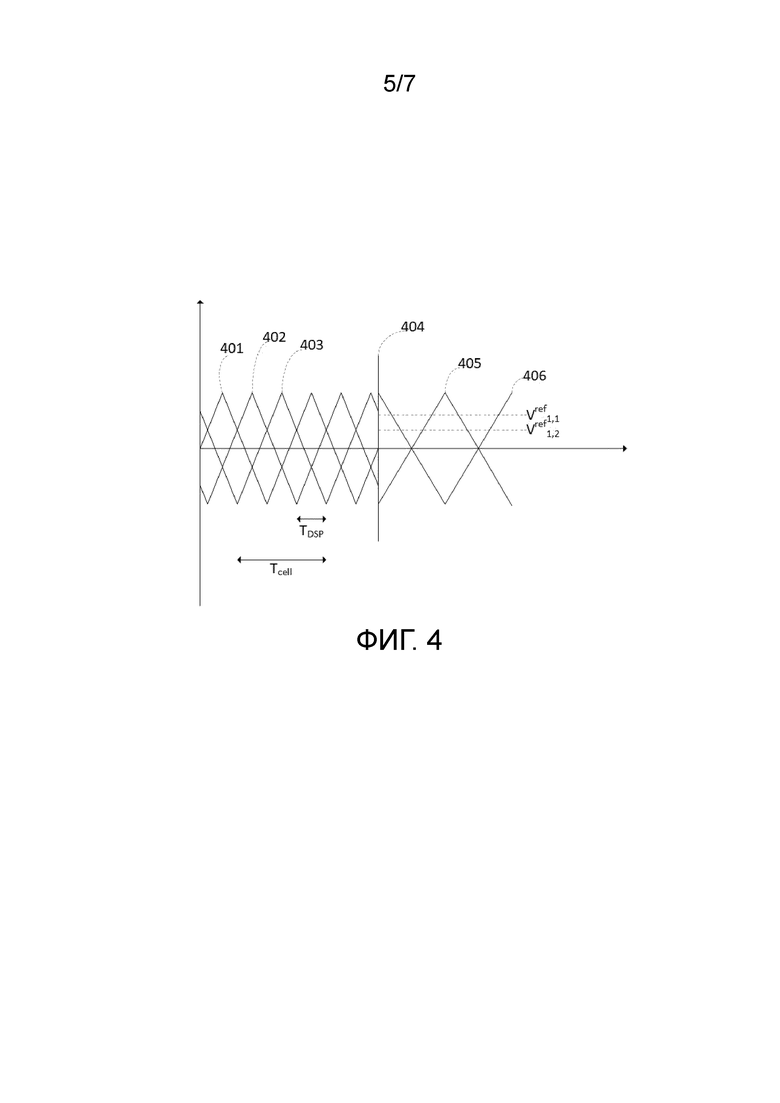
фигура 4 иллюстрирует управляющие сигналы, подаваемые управляющим устройством согласно первому варианту воплощения изобретения;
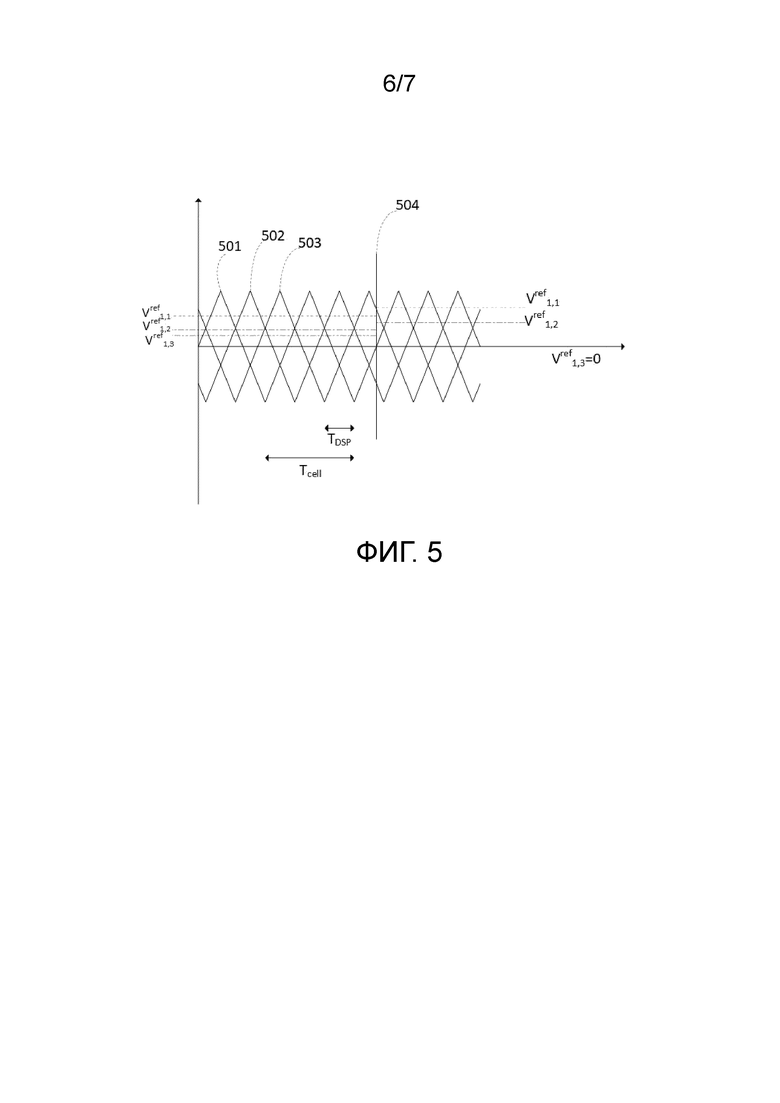
фигура 5 иллюстрирует управляющие сигналы, подаваемые управляющим устройством согласно второму варианту воплощения изобретения;
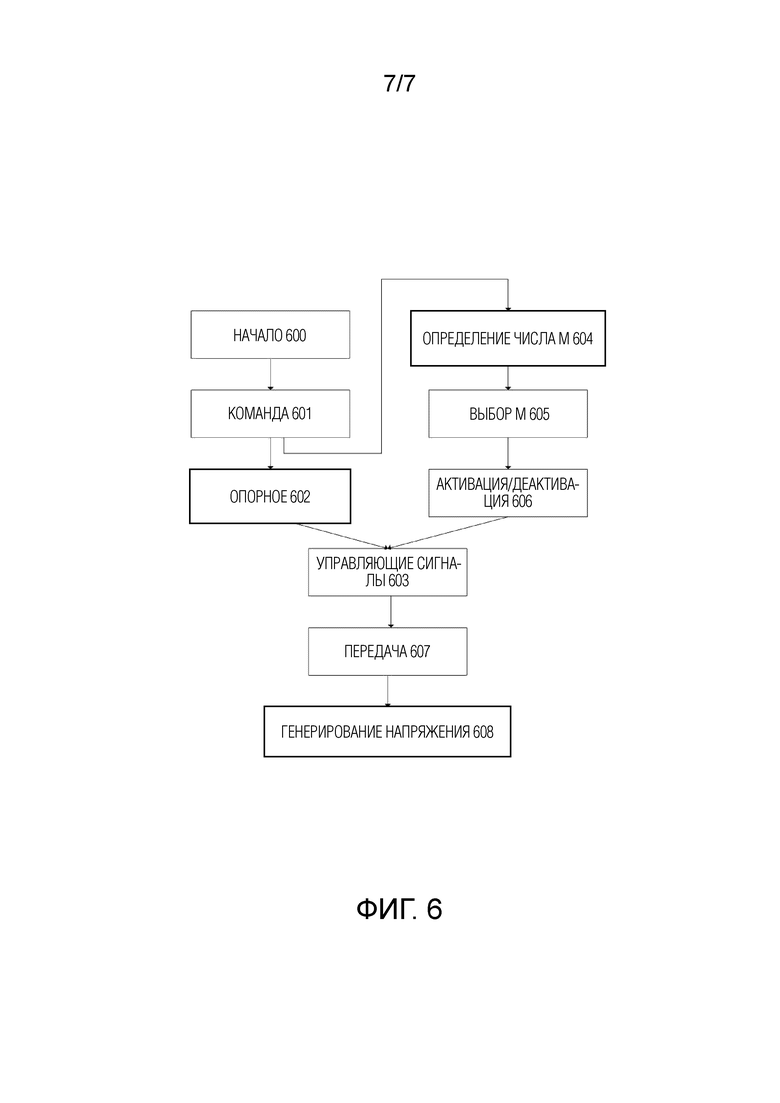
фигура 6 представляет собой блок-схему, иллюстрирующую этапы способа согласно варианту воплощения изобретения.
Подробное описание:
Фигура 1 представляет систему питания электродвигателя 100, такого как, например, индукционный двигатель, снабжаемый электропитанием трехфазного переменного тока. Такой двигатель приведен в качестве примера, но изобретение не ограничено этим единственным примером, и изобретение применимо для любого двигателя, снабжаемого электропитанием от регулятора скорости, содержащего множественные силовые элементы.
Регулятор 102 скорости включает в себя трансформатор 111, принимающий трехфазное переменное электропитание от электросети 110. Вторичная обмотка трансформатора 111 связана с силовым каскадом. Трансформатор 111 может представлять собой многообмоточный трансформатор, чтобы он мог подавать напряжения на описанные ниже множественные силовые элементы.
Силовой каскад согласно изобретению может включать в себя один или более силовых элементов 101 низкого напряжения. В примере, проиллюстрированном на фигуре 1, двигатель получает трехфазное электропитание, а силовой каскад включает в себя 3*(N+1) силовых элементов, с N+1 силовыми элементами, предназначенными для каждой фазы, причем N больше или равно 2.
Что касается фигуры 1, здесь представлена система с 3*(N+1) силовыми элементами, причем силовой элемент сохраняется на фазе в случае отказа одного из активных силовых элементов. Такой пример приведен лишь в иллюстративных целях. В действительности, изобретение также применимо для системы с N силовыми элементами (или с 3*N, – для трехфазного электропитания), или для системы с N+2 (или более N+2) силовых элементов (или 3*(N+2) для трехфазного электропитания). Кроме того, каждая фаза i регулятора скорости может включать в себя число Ni силовых элементов, с различными значениями Ni, и изобретение можно применять независимо для каждой из фаз.
Каждый силовой элемент 101 принимает на входе трехфазное электропитание от одной из вторичных обмоток трансформатора 111 и может включать в себя выпрямитель (не представлен на фигуре 1) на входе, причем этот выпрямитель способен выпрямлять получаемое трехфазное электропитание с выдачей постоянного напряжения. Постоянное выпрямленное напряжение, полученное для каждого силового элемента 101, также называют напряжением шины постоянного тока, DC, или напряжением шины. Выпрямитель может включать в себя диодный мост, тиристорный мост или любую другую известную систему для выпрямления напряжения.
На выходе выпрямителя каждый силовой элемент 101 может включать в себя емкость, способную аккумулировать электроэнергию, а также модуль генерирования напряжения, принимающий сигналы широтно-импульсной модуляции, ШИМ (по-английски «Pulse Width Modulation», PWM). Такой модуль генерирования может включать в себя H-мост, содержащий четыре разъединителя, управляемые попарно. Система силовой электроники, использующая такой принцип прерывистого напряжения, снабжает двигатель 100, на каждую фазу, напряжением, которое пропорционально одному или более выпрямляемым напряжениям. В среднем, подаваемая доля соответствует соотношению между целевым напряжением и выпрямленным опорным напряжением (охарактеризованным ниже). Функционирование H-моста хорошо известно и не будет далее описано в настоящей заявке.
Разъединители H-моста могут представлять собой транзисторы типа биполярных транзисторов с изолированным затвором, IGBT (от англ. «Insulated Gate Bipolar Transistor»), которые обладают тем преимуществом, что их можно быстро переключать.
Разъединители силового элемента 101 управляются элементом управления (от франц. «cellule de commande», CC) 103 силового элемента 101.
Система дополнительно включает в себя управляющее устройство 120, способное управлять электрическим питанием электродвигателя 100. Для этой цели управляющее устройство 120 может управлять элементами 103 управления силовых элементов 101. Управляющее устройство 120 может дополнительно управлять разъединителями 105, позволяя подключать последовательно подкомплект из N+1 силовых элементов для каждой фазы. В качестве варианта, эти разъединители управляются управляющим устройством 120 посредством элементов 103 управления.
Силовые элементы 101 могут принимать от управляющего устройства 120 управляющие сигналы, исходя из которых силовые элементы 101 могут управлять разъединителями H-моста.
В качестве варианта, силовые элементы 101 могут принимать от управляющего устройства 120 опорные напряжения, исходя из которых силовые элементы 101 могут определять степень ШИМ (коэффициент заполнения), применяемый к выпрямленному напряжению, а также определять команды, подаваемые на разъединители H-моста.
Таким образом, трехфазные напряжения, подаваемые на двигатель 100, получаются путем суммирования выходных напряжений ШИМ силовых элементов 101, у которых разъединители 105 разомкнуты. Элемент называют «активным», когда его разъединитель 105 разомкнут и когда применяемый им коэффициент заполнения не является нулевым. Таким образом, силовой элемент, у которого разъединитель 105 разомкнут, но у которого коэффициент заполнения является нулевым, можно рассматривать как деактивированный. Таким образом, в качестве активного элемента можно рассматривать любой силовой элемент, который подает ненулевое выходное напряжение.
Согласно уровню техники, число активных силовых элементов является постоянным, и поэтому в случае низкого напряжения, подаваемого на двигатель 100, каждый силовой элемент 101 обеспечивает небольшие импульсы напряжения.
Изобретение, напротив, предлагает определять число активных силовых элементов 101 среди силовых элементов фазы в зависимости от амплитуды опорного напряжения двигателя, принимаемого управляющим устройством 120 (или определяемого управляющим устройством 120 исходя из команды скорости). Такое же число может быть выбрано для других фаз. В качестве варианта, для различных фаз можно выбрать различные числа активных элементов.
Фигура 2a иллюстрирует изменение числа активных силовых элементов 101 в зависимости от амплитуды опорного напряжения двигателя согласно варианту воплощения изобретения.
Опорное напряжение двигателя указано в команде, полученной управляющим устройством 120. В качестве варианта, опорное напряжение двигателя может быть исправлено с учетом неисправностей в силовом каскаде.
На фигуре 2a следует учитывать, что могут быть использованы пороговые значения напряжения для решения о том, следует активировать или деактивировать один или более силовых элементов 101 данной фазы. Как проиллюстрировано на фигуре 2a, пределы, используемые для уменьшения числа активных элементов, могут быть соответственно ниже пределов, используемых для повышения числа активных элементов. В действительности, это позволяет снизить число операций активации/деактивации, со снижением при этом потерь мощности, а следовательно, с оптимизацией использования системы питания. Кроме того, при деактивации нескольких силовых элементов, их деактивируют друг за другом, а не все одновременно.
Кроме того, при снижении числа активных элементов:
– тепловой режим регулятора 102 скорости улучшается; и
– если каждый силовой элемент 101 является неисправным (дефектным), влияние дефектов силового каскада на желаемое напряжение двигателя 100 сокращается.
Фигура 2b иллюстрирует напряжение, обеспечиваемое на выходе каждого силового элемента 101, в зависимости от числа активных силовых элементов согласно варианту воплощения изобретения.
В решениях согласно уровню техники, в которых число активных силовых элементов является неизменным, напряжение, подаваемое каждым силовым элементом 101, линейно повышается с опорным напряжением двигателя.
Фигура 3 иллюстрирует структуру управляющего устройства 120 согласно варианту воплощения изобретения.
Управляющее устройство 120 включает в себя процессор 300, такой как процессор цифровых сигналов, DSP («Digital Signal Processor» по-английски), а также программируемую интегральную схему 301 типа программируемой вентильной матрицы, FPGA, по-английски «Field–Programmable Gate Array».
Процессор 300 предназначен для определения опорных напряжений двигателя, передаваемых на FPGA 301. В частности, процессор 300 включает в себя модуль 302 расширенной ШИМ (от англ. «ePWM»), предназначенный для приема первого опорного напряжения двигателя на входе, рассчитанного ранее другими компонентами процессора 300, не указанными на фигуре 3.
Из опорного напряжения двигателя модуль 302 расширенной ШИМ может рассчитать управляющие команды, такие как управляющие команды ШИМ. Управляющие команды генерируются за счет сопоставления треугольных сигналов и опорных управляющих напряжений.
Для каждого элемента 103 управления силового элемента 101 предназначен управляющий сигнал ШИМ, полученный в результате сопоставления треугольных сигналов и опорного управляющего напряжения, для определения того, когда должны быть подключены IGBT-транзисторы H-моста, и тогда силовой элемент 101 подает выходное напряжение в форме импульсов широтно-импульсной модуляции, ШИМ.
Однако, поскольку число управляющих сигналов, соответствующих каждому IGBT, становится слишком большим, согласно варианту воплощения изобретения FPGA 301 можно вставлять между процессором 300 и силовыми элементами 101, и поэтому управляющие команды, исходящие из процессора 300, не передаются непосредственно на силовые элементы 101.
В этом случае, модуль 302 расширенной ШИМ подает опорные напряжения на FPGA 301. Эту подачу можно осуществить, например, посредством сигналов ШИМ, для которых коэффициенты заполнения соответствуют напряжениям трех фаз двигателя. Без потери общего характера, можно использовать и другие средства подключения.
Исходя из опорного напряжения двигателя, модуль 302 расширенной ШИМ может рассчитать управляющие команды, такие как управляющие команды ШИМ. Управляющие команды генерируются за счет сопоставления треугольных сигналов и опорных управляющих напряжений.
FPGA 301 может включать в себя на входе блок 303 интегрирования, предназначенный для интегрирования сигнала ШИМ, подаваемого модулем 302 расширенной ШИМ, для восстановления опорных напряжений двигателя.
Модули 302 и 303 являются необязательными и используются только в случае, когда процессор 300 исходно задуман для непосредственной подачи управляющих команд на ограниченное число силовых элементов 101, и когда FPGA 301 добавлена на выходе согласно вариантам воплощения изобретения, без необходимости замены процессора 300. Однако модуль 303 не используется тогда, когда модуль 302 процессора 300 отсутствует и когда процессор 300 подает первое опорное напряжение двигателя непосредственно на FPGA 301, без кодирования опорных напряжений посредством ШИМ.
Таким образом, согласно варианту воплощения без модулей 302 и 303, опорное напряжение двигателя, исходящее из процессора 300, передается непосредственно на модуль генерирования команды ШИМ 304 от FPGA 301.
Модуль 304 принимает на входе опорное напряжение двигателя, выпрямленное напряжение шины силовых элементов и, согласно изобретению, данные о числе активных элементов для одной фазы, чтобы сгенерировать управляющие команды ШИМ, предназначенные для элементов 103 управления силовых элементов 101. Управляющие команды можно передавать на силовые элементы 101 через модуль 305 передачи. На модуль передачи, который может включать в себя комплект волокон с гальванической изоляцией, для передачи управляющих сигналов, не накладываются никакие ограничения.
В изобретении предлагается изменять число активных силовых элементов 101 на фазу в зависимости от опорного напряжения двигателя (исходящего от блока 303 интегрирования или непосредственно от процессора 300 согласно рассматриваемому варианту воплощения). Число активных силовых элементов 101 на фазу можно определить с помощью процессора 300 или с помощью FPGA 301, например, исходя из кривых, представленных на фигурах 2a и 2b, или, в более общем виде, из набора правил, указывающих на число активных силовых элементов 101 для каждого уровня напряжения, во время стадии ускорения или замедления двигателя. Ниже представлены два варианты воплощения, предусмотренные для этой цели.
Согласно первому варианту воплощения изобретения, проиллюстоированному на фигуре 4, изменение числа активных силовых элементов синхронизировано между процессором 300 и FPGA 301. Фигура 4 иллюстрирует управляющие сигналы во время перехода из конфигурации, в которой активированы три силовых элемента 101, в конфигурацию, в которой для данной фазы активировано два силовых элемента 101, в момент времени 404. Такие конфигурации зависят, конечно же, от ситуации и приведены лишь в иллюстративных целях. Фигура 4 соответствует управляющим сигналам для одной фазы из трех фаз, запитывающих двигатель 100 по фигуре 1.
В конфигурации, предшествующей трем активным силовым элементам 101, треугольные сигналы 401, 402 и 403 генерируются FPGA 301 для трех силовых элементов 101 первой фазы. Эти треугольные сигналы связаны с соответствующими опорными управляющими напряжениями Vref1,1, Vref1,2 и Vref1,3 для сопоставления и генерирования управляющих команд ШИМ, подаваемых на соответствующие силовые элементы. Первые индексы «1» обозначений Vref1,1, Vref1,2 и Vref1,3 означают первую фазу из трех фаз регулятора 102 скорости. Изобретение применяется независимо от других фаз.
Треугольные сигналы имеют сдвиг по фазе, равный 2π, деленный на число активных элементов, т.е. в примере, проиллюстрированном на фигуре 4, это 2π/3. Такой сдвиг позволяет избежать пиков напряжения при суммировании выходных напряжений активных силовых элементов 101 для питания двигателя 100.
Таким образом, период DSP 300, который обеспечивает треугольные сигналы на выходе, соответствует трети периода треугольного сигнала.
В момент времени 404 в соответствии с изобретением определяют, что число активных силовых элементов 101 снижено до двух. Такое определение может происходить вслед за приемом новой команды скорости и/или вслед за расчетом нового значения опорного напряжения двигателя, в частности, меньшего предыдущего значения.
Частоту DSP 300 затем изменяют для ее адаптации к такому снижению. В рассматриваемом примере период DSP 300 умножен на 1,5 (таким образом, частота снижена на треть).
Два треугольных сигнала 405 и 406 тогда генерируются блоком 304 для двух активных силовых элементов 101.
Блок 304 дополнительно рассчитывает новые значения Vref1,1 и Vref1,2, соответствующие треугольным сигналам 405 и 406. Новые значения Vref1,1 и Vref1,2 рассчитывают так, чтобы получить выходное целевое напряжение для питания двигателя 100. Значение Vref1,3 не рассчитывают, поскольку элемент 1011,3 отключают после момента времени 404. Затем генерируются управляющие сигналы ШИМ и передаются на два активных силовых элемента 1011,1 и 1011,2.
Первый вариант воплощения позволяет минимизировать гармонический спектр сигнала на выходе регулятора 102 скорости и, таким образом, улучшить качество сигнала.
Согласно второму варианту воплощения лишь FPGA 301 позволяет адаптировать его функционирование к снижению числа активных силовых элементов 101 так, чтобы это не влияло на функционирование процессора 300.
FPGA 301, таким образом, обеспечивает для вышеупомянутой фазы треугольные сигналы 501-503, связанные соответственно с соответствующими опорными управляющими напряжения Vref1,1, Vref1,2 и Vref1,3.
В момент времени 504 изменение числа активных силовых элементов 101 с трех на два определяют, например, по приему новой команды скорости и/или из расчета нового опорного напряжения двигателя.
Период TDSP процессора 300 не изменяется, и поэтому треугольные сигналы остаются смещенными по фазе на 2π/3.
FPGA 301 пересчитывает значения Vref1,1 и Vref1,2 так, чтобы получилось целевое выходное напряжение регулятора скорости, а также фиксированное значение Vref1,3, равное нулю. Поэтому коэффициент заполнения, применяемый силовым элементом 1011,3, равен 0, и напряжение на выходе этого силового элемента 1011,3 равно нулю. В таком случае силовой элемент 1011,3 можно рассматривать как неактивный. Таким образом, второй вариант воплощения позволяет адаптировать число активных силовых элементов 101, без необходимости в синхронизации между процессором 300 и FPGA 301, а следовательно, без воздействия на функционирование процессора 300.
Согласно дополнительным вариантам воплощения изобретения в ходе деактивации силового элемента или нескольких силовых элементов, или во время неисправности силового элемента, один или более отключаемых силовых элементов 101 можно выбирать так, чтобы можно было регулировать износ/соответствующее время функционирования силовых элементов 101. Управление соответствующим временем функционирования силовых элементов можно осуществлять независимо от изменения числа активных силовых элементов в представленном выше регуляторе скорости.
Далее представлено несколько случаев по фигуре.
Первый случай
В первом случае регулятор 102 скорости включает в себя N силовых элементов 101 на фазу. При расчете опорного напряжения двигателя или когда команда скорости не требует использования всех силовых элементов 101, неактивные силовые элементы 101 можно выбирать в зависимости от соответствующего износа силовых элементов 101. Например, каждый силовой элемент 101 может включать в себя счетчик, приводимый в действие при активации (включении) силового элемента 101 и отключаемый при деактивации (отключении) силового элемента 101, чтобы можно было измерять износ силового элемента.
В качестве примера, если для фазы требуются M активных силовых элементов 101 в зависимости от команды скорости или от опорного напряжения двигателя, а M ниже N, то N-M силовых элементов, обладающих более высоким износом, отключают, что позволяет выравнивать износ силовых элементов 101. В более общем виде, M активируемых силовых элементов 101 выбирают так, чтобы снизить стандартное отклонение времени функционирования/износа силовых элементов 101. В качестве альтернативы, N-M силовых элементов 101, обладающих меньшим износом, отключают, что позволяет усиливать износ определенных силовых элементов 101, которые затем будет заменены новыми силовыми элементами.
Второй случай
Во втором случае регулятор 102 скорости включает в себя по меньшей мере N+1 силовых элементов 101 на фазу, следовательно, обладает по меньшей мере одним сменным силовым элементом для устранения неисправности или отказа активного силового элемента 101.
Когда необходимо наличие N силовых элементов 101 на фазу для поддержания опорного напряжения двигателя, напряжения управления двигателем или команды скорости (при функционировании на полную мощность или близко к ней), сменный силовой элемент, который является неактивным, можно выбрать в зависимости от соответствующего износа силовых элементов, как обсуждалось применительно к первому случаю. Таким образом, сменный силовой элемент не является постоянным.
Аналогично, когда требуется наличие M активных силовых элементов на фазу в зависимости от опорного напряжения двигателя, напряжения управления двигателем или команды скорости, а M ниже N, тогда отключают N–M+1 силовых элементов, обладающих более высоким износом, что позволяет выравнивать износ силовых элементов 101. В более общем виде, M активируемых силовых элементов выбирают так, чтобы можно было снизить стандартное отклонение времени функционирования/износа силовых элементов 101. В качестве альтернативы, деактивируют N–M+1 силовых элементов, обладающих меньшим износом, что позволяет усиливать износ других силовых элементов 101, которые затем будут заменены новыми силовыми элементами.
Третий случай
В третьем случае регулятор 102 скорости включает в себя N силовых элементов 101 на фазу, и неисправность или отказ происходит на одном из силовых элементов 101.
В этом случае неисправный силовой элемент 101 деактивируется, а управляющее устройство 120 управляет регулятором скорости согласно конфигурации с N–1 силовыми элементами, таким образом активируя от 0 до N–1 силовых элементов 101 в зависимости от опорного напряжения двигателя. Иными словами, управляющее устройство 120 снижает максимальное напряжение, которое может быть обеспечено регулятором 102 скорости.
Четвертый случай
В четвертом случае предполагается, что регулятор 102 скорости включает в себя число Ni силовых элементов 101 на фазу, где i – индекс фазы (который может варьироваться от 1 до 3, в случае, например, трехфазного регулятора скорости).
В случае отказа силового элемента фазы i, конфигурация ветви i регулятора скорости снижается до 1.
Таким образом, максимальное напряжение, которое достигается при поддержании равновесия между фазами, соответствует минимальному из максимальных значений, достигаемых для каждой из фаз.
Приняв VmaxVariateur за такое максимальное напряжение регулятора скорости, оно равно min(Ni*Vmax), где min() – функция минимума, когда индекс i меняется, а Vmax – максимальное напряжение, которое может обеспечивать силовой элемент.
В зависимости от опорного напряжения двигателя или команды скорости, определяют минимальное число необходимых силовых элементов на фазу Li, и Li может изменяться от 1 до min(Ni).
Таким образом, для каждой фазы i, к двигателю можно прикладывать напряжение, активируя число Mi силовых элементов, составляющее от Li до Ni, где Mi на фазу может быть различным.
Таким образом, может быть предусмотрена активация большего числа силовых элементов, чем число Li, которое необходимо, как минимум, для достижения опорного напряжения двигателя или команды скорости, что может позволить осуществлять стратегию селективного износа силовых элементов. Таким образом, выбор значения Mi для каждой фазы может зависеть от критерия износа силовых элементов, или от любого другого заданного критерия.
Фигура 6 представляет собой блок-схему, иллюстрирующую этапы способа согласно варианту воплощения изобретения. Должно быть понятно, что речь идет о данной фазе из возможно нескольких фаз.
На этапе 600, в ходе предыдущей стадии, активируют K силовых элементов 101 регулятора 102 скорости, а N-K силовых элементов 101 остаются неактивными. Такая конфигурация может быть принята вслед за приемом предыдущей команды скорости и при обработке команды скорости процессором 300 и FPGA 301.
На этапе 601 процессор 300 принимает новую команду скорости и обрабатывает команду скорости для вывода первого опорного напряжения двигателя.
На этапе 602 полученное первое опорное напряжение двигателя передается непосредственно на модуль 304 FPGA, или оно обрабатывается модулями 302 и 303 с получением второго опорного напряжения двигателя, передаваемого на модуль 304 FPGA. В варианте воплощения, содержащем модули 302 и 303, процессор 300 дополнительно определяет число M активируемых силовых элементов, и частота процессора 300 изменяется так, чтобы можно было обеспечивать треугольные сигналы, в зависимости от числа M, в соответствии с фигурой 4.
Управляющие сигналы затем определяются на этапе 603, как было описано выше.
Ранее и параллельно, число M активируемых силовых элементов было определено на этапе 604, как было описано ранее, на основе команды скорости (или напряжений, выведенных из команды скорости). Согласно необязательному этапу 605 выбирают M силовых элементов из N или N+1 (или более), в зависимости от заданного критерия. В этом случае управляющие сигналы предпочтительно генерируют для M выбранных силовых элементов.
Некоторое число Mi может быть выбрано для нескольких фаз с индексами i регулятора скорости, где каждая фаза с индексом i содержит Ni силовых элементов. Тогда число Mi составляет от Ki до Ni, как подробно разъяснялось выше.
Затем, на этапе 606, активируют M силовых элементов (или они остаются в своем активном состоянии), а N-M силовых элементов деактивируют. Для силовых элементов могут быть предусмотрены обходные разъединители 105, предназначенные для этой цели, и эти разъединители замыкают для деактивированных элементов и размыкают для активированных элементов. В качестве варианта, силовой элемент можно деактивировать, придавая ему нулевой коэффициент заполнения, даже если его обходной разъединитель 105 был разомкнут.
Затем, на этапе 607, управляющие сигналы передаются на элементы 103 управления силовых элементов 101 (например, M активных силовых элементов 101).
На этапе 608 активные силовые элементы 101 генерируют соответствующие выходные напряжения в зависимости от полученных управляющих сигналов для того, чтобы достичь опорного напряжения двигателя.
Хотя настоящее изобретение было описано выше применительно к конкретным вариантам воплощения, изобретение никоим образом не ограничено описанными формами. Изобретение ограничено лишь тем, что охарактеризовано в формуле изобретения и в вариантах воплощения, отличных от тех, которые описаны выше и могут входить в объем формулы изобретения.
Кроме того, хотя варианты воплощения были описаны как сочетание компонентов и/или функций, должно быть понятно, что альтернативные варианты воплощения могут быть получены с помощью других сочетаний компонентов и/или функций, без отступления от объема изобретения.
Группа изобретений относится к управлению двигателями переменного тока. Способ управления регулятором скорости, запитывающим электродвигатель, причем регулятор скорости содержит множество Ni силовых элементов низкого напряжения, соединенных последовательно для по меньшей мере одной фазы с индексом i, заключается в следующем. После приема команды скорости определяют число Mi элементов, достаточное для питания двигателя целевым выходным напряжением V, которое определяют на основе команды скорости, и активируют Mi силовых элементов из Ni силовых элементов и деактивируют Ni-Mi других силовых элементов для питания двигателя в соответствии с командой скорости. Также заявлены компьютерная программа, исполняемая вычислительным устройством и содержащая команды для осуществления этапов способа управления регулятором скорости, и управляющее устройство регулятора скорости, запитывающего электродвигатель. Причем управляющее устройство содержит интерфейс, предназначенный для приема команды скорости, и вычислительное устройство, предназначенное для определения числа Mi элементов. Технический результат заключается в оптимизации использования силовых элементов регулятора скорости. 3 н. и 13 з.п. ф-лы, 7 ил.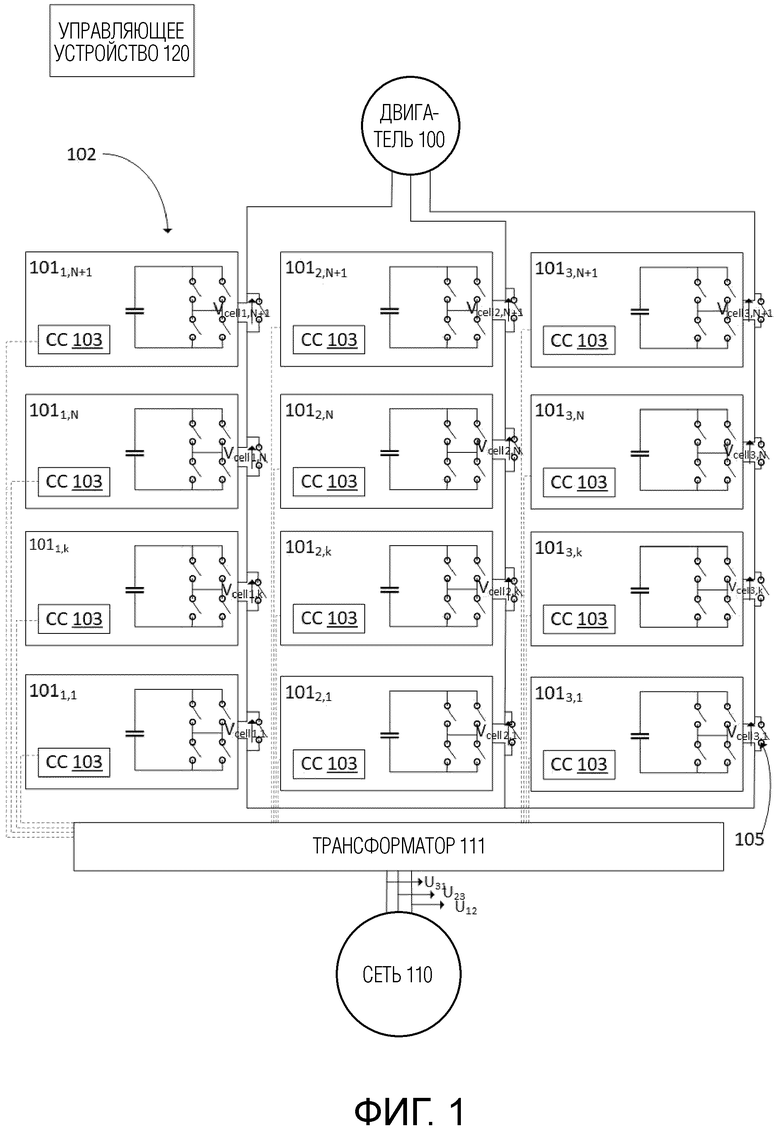
1. Способ управления регулятором скорости (102), запитывающим электродвигатель (100), причем регулятор скорости содержит множество из по меньшей мере Ni силовых элементов (101) низкого напряжения, соединенных последовательно для по меньшей мере одной фазы с индексом i, включающий в себя:
после приема команды (601) скорости определение (604) числа Mi элементов, достаточного для питания двигателя целевым выходным напряжением V, которое определяют на основе команды скорости;
активацию (606) Mi силовых элементов из Ni силовых элементов и деактивацию (606) Ni-Mi других силовых элементов для питания двигателя в соответствии с командой скорости.
2. Способ по п. 1, в котором регулятор скорости содержит несколько фаз, причем каждая фаза с индексом j имеет Nj силовых элементов, в котором число Mi для фазы с индексом i меньше минимального из значений Nj, при j, изменяющемся от 1 до числа фаз регулятора скорости.
3. Способ по п. 1 или 2, в котором каждый силовой элемент (101) выполнен с возможностью выдавать выходное напряжение ниже максимального значения Vmax, причем способ включает в себя определение, исходя из команды скорости, целевого выходного напряжения V регулятора скорости (102), при котором Mi таково, что Mi*Vmax≥V.
4. Способ по п. 3, в котором Mi представляет собой такое наименьшее целое число, что Mi*Vmax≥V.
5. Способ по одному из предыдущих пунктов, в котором перед приемом (601) команды скорости способ включает в себя предыдущую стадию (600), на которой для питания двигателя активными являются Ki силовых элементов (101), причем Ki меньше или равно Ni, и Ki отлично от Mi, в котором, если Ki больше Mi, то Ki-Mi силовых элементов отключают для питания двигателя (100) в соответствии с командой скорости; в противном случае, Mi-Ki силовых элементов активируют для питания двигателя в соответствии с командой скорости.
6. Способ по п. 5, в котором, если │Mi-Ki│≥2, то │Mi-Ki│ силовых элементов активируют/деактивируют друг за другом.
7. Способ по одному из предыдущих пунктов, дополнительно включающий в себя передачу управляющих сигналов на элементы (103) управления Mi активных силовых элементов (101) фазы i, в котором для каждого активного силового элемента (101) управляющий сигнал включает в себя команды переключения определенных разъединителей H-моста силового элемента, и в котором каждый управляющий сигнал генерируют из треугольного сигнала и значения опорного управляющего напряжения.
8. Способ по пп. 5 и 7, в котором в ходе предыдущей стадии используют Ki треугольных сигналов, смещенных по фазе друг относительно друга на 2π/Ki, для генерирования соответствующих управляющих сигналов, эквивалентных соответствующим значениям Vreft опорных управляющих напряжений, где t изменяется от 1 до Ki; и в котором вслед за приемом команды скорости используют Mi треугольных сигналов, смещенных по фазе друг относительно друга на 2π/Mi, для генерирования соответствующих управляющих сигналов, эквивалентных новым соответствующим значениям Vreft опорных управляющих напряжений, где t изменяется от 1 до Mi, причем новые значения определяют исходя из команды скорости.
9. Способ по пп. 5 и 7, в котором, если Ki больше Mi, то в ходе предыдущей стадии используют Ki треугольных сигналов, смещенных по фазе друг относительно друга на 2π/Ki, для генерирования соответствующих управляющих сигналов, эквивалентных соответствующим значениям Vreft опорных управляющих напряжений, где t изменяется от 1 до Ki; и в котором вслед за приемом команды скорости используют Ki треугольных сигналов, смещенных по фазе друг относительно друга на 2π/Ki, для генерирования соответствующих управляющих сигналов, эквивалентных новым соответствующим значениям Vreft опорных управляющих напряжений, где i изменяется от 1 до Ki, причем новые значения определяют исходя из команды скорости, и при этом Ki-Mi новых значений Vreft устанавливают равными нулю.
10. Способ по одному из предыдущих пунктов, в котором регулятор скорости (102) содержит для каждого силового элемента (101) разъединитель, выполненный с возможностью подключения и отключения силового элемента из последовательности силовых элементов, в котором разъединитель активного силового элемента разомкнут, а разъединитель неактивного силового элемента замкнут.
11. Способ по одному из предыдущих пунктов, дополнительно включающий в себя выбор Mi силовых элементов (101) из Ni силовых элементов (101) в зависимости от заданного критерия и активацию Mi выбранных силовых элементов (101).
12. Способ по п. 11, в котором каждый из по меньшей мере Ni силовых элементов (101) связан со счетчиком, измеряющим время функционирования силового элемента, и в котором заданный критерий зависит от соответствующего времени функционирования силовых элементов (101).
13. Способ по п. 12, в котором Mi силовых элементов (101) выбирают так, чтобы снизить стандартное отклонение между заданным критерием, который может зависеть от времени функционирования силовых элементов.
14. Компьютерная программа, исполняемая вычислительным устройством (300; 301) и содержащая команды для осуществления этапов способа по одному из пп. 1-13 при ее исполнении вычислительным устройством.
15. Управляющее устройство регулятора скорости (102), запитывающего электродвигатель (100), причем регулятор скорости содержит множество из по меньшей мере Ni силовых элементов (101) низкого напряжения, соединенных последовательно для по меньшей мере одной фазы с индексом i, а управляющее устройство содержит интерфейс, предназначенный для приема команды скорости; вычислительное устройство (300; 301), предназначенное для определения числа Mi элементов, достаточного для питания двигателя напряжением, определяемым на основе команды скорости, и для активации Mi силовых элементов из Ni силовых элементов и деактивации Ni-Mi других силовых элементов для питания двигателя в соответствии с командой скорости.
16. Управляющее устройство по п. 15, содержащее процессор цифровых сигналов, содержащий интерфейс для приема команды скорости, причем процессор цифровых сигналов дополнительно управляет программируемой печатной платой, при этом соответствующие выходы программируемой печатной платы соединены с Ni силовыми элементами, в котором управляющие сигналы передаются на элементы управления Mi активных силовых элементов.
| FR 3060238 A1, 15.06.2018 | |||
| EP 3076535 A2, 05.10.2016 | |||
| US 5625545 A, 29.04.1997 | |||
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2013 |
|
RU2594359C2 |

