Изобретение относится к устройству обработки для обработки измерительного сигнала, имеющего отношение к режимам объекта, управляемого силовой электроникой, содержащему интерфейс с цифровыми клеммами, при этом интерфейс снабжен по меньшей мере одной клеммой для датчика, который формирует измерительный сигнал, дополнительно содержащему блок расчета, к которому присоединен интерфейс, при этом блок расчета оборудован системой управления реального времени.
Такое устройство обработки, например, известно в качестве измерительного оборудования для обработки и представления измерительного сигнала, имеющего отношение к режимам работы двигателя переменного тока, который приводит в действие компрессор большой мощности. Измерительный сигал, формируемый датчиком тока во время работы двигателя, например, представляет электрический ток в обмотке двигателя. Интерфейс оцифровывает аналоговый измерительный сигнал и подает его в блок расчета. В известном устройстве обработки данных, блок расчета сконструирован в качестве цифрового сигнального процессора (ЦСП, DSP), так что оцифрованный сигнал может дополнительно обрабатываться, например, для представления, сохранения и/или расчетов. Поскольку блок расчета оснащен системой управления реального времени, измерительный сигнал может обрабатываться в реальном времени.
Цифровые сигнальные процессоры хорошо пригодны для обработки в реальном времени цифровых сигналов, в частности, вследствие подтвержденной при испытаниях надежности, подходящих энергетических свойств и низкой себестоимости. Для обработки в реальном времени измерительного сигнала, имеющего отношение к режимам работы двигателя переменного тока, который приводит в действие компрессор с относительно высокой номинальной частотой вращения, такой как турбокомпрессор, вычислительная производительность современных ЦСП, однако, может быть не отвечающей требованиям. Это происходит потому, что количество этапов обработки, которые ЦСП может выполнять в пределах цикла выборки измерительного сигнала, сокращается по мере того, как растет частота выборки измерительного сигнала. Обычно, частота выборки измерительного сигнала выбирается пропорционально частоте сигнала управления двигателя переменного тока. Частота сигнала управления часто становится более высокой по мере того, как возрастает частота вращения двигателя переменного тока, так что могут обрабатываться относительно высокие собственные частоты двигателя переменного тока.
Цель изобретения состоит в том, чтобы получить устройство обработки согласно вступительной части пункта 1 формулы изобретения, где устранен вышеупомянутый недостаток. В частности, цель настоящего изобретения состоит в том, чтобы получить устройство обработки для обработки измерительного сигнала, имеющего отношение к объекту, управляемому силовой электроникой, наряду с тем, что, при относительно высокой номинальной частоте вращения электрической машины и высокой частоте выборки, требуемой при этом, устройство обработки по-прежнему может выполнять относительно большое количество этапов обработки в реальном времени для обработки относительно высоких собственных частот электрической машины. В дополнение, блок расчета содержит оборудование общего применения.
Хотя, вследствие более низкой надежности, более высокого энергопотребления и относительно высокой себестоимости, процессор общего применения мог бы не иметь права быть избранным для использования в устройстве обработки для обработки измерительных сигналов объекта, управляемого силовой электроникой, тем не менее, применение процессора общего применения имеет следствием большую вычислительную производительность, в частности, что касается операций с плавающей точкой, так что, при относительно высокой частоте вращения двигателя переменного тока, по-прежнему большое количество этапов обработки может выполняться над оцифрованным измерительным сигналом в реальном времени.
В дополнение, посредством использования процессора общего применения, получена платформа, на которой может устанавливаться стандартное программное обеспечение, например, для программирования этапов обработки. В дополнение, компилированные программы специальных алгоритмов могут объединяться без выпуска исходных кодов, например, для целей тестирования. В дополнение, устройство обработки относительно легко может быть выполнено с возможностью для обмена данными с другим оборудованием, например, для загрузки машинной программы, получения данных измерений, сохранения данных, корректировки параметров и так далее. Кроме того, устройство обработки может быть встроено в существующий ПК (персональный компьютер, PC) или сконструировано в качестве автономного устройства.
Посредством компоновки устройства обработки, из условия, чтобы, в зависимости от измерительного сигнала, устройство формировало сигнал управления для регулирования объекта, управляемого силовой электроникой, в виде преимущества, получено устройство обработки, которое также может использоваться для регулирования, например, двигателя переменного тока у компрессора с относительно высокой частотой вращения, такого как турбокомпрессор. Это происходит потому, что для регулирования двигателя переменного тока требуется минимальное количество этапов обработки измерительного сигнала. Посредством использования процессора общего применения, эти этапы обработки могут выполняться в пределах цикла выборки измерительного сигнала, так что возможно регулирование компрессоров с относительно высокими частотами вращения, в отличие от известных устройств обработки, которые сконструированы с ЦСП, доступными для приобретения в настоящее время.
В виде преимущества, устройство обработки может использоваться для обработки измерительного сигнала, имеющего отношение к электрической машине высокой номинальной мощности, которая управляется силовой электроникой. Это дает возможность также обрабатывать измерительные сигналы электрических машин с высокой номинальной мощностью, например, с мощностью в более чем приблизительно 1 кВт, или более чем 30 кВт, или приблизительно 50 кВт, в реальном времени. Кроме того, таким образом могут регулироваться электродвигатели высокой мощности.
Кроме того, интерфейс может быть выполнен с возможностью для приема многочисленного количества измерительных сигналов, имеющих отношение к режимам объекта, управляемого силовой электроникой. Таким образом, в дополнение к одному или многочисленному количеству измерительных сигналов, представляющих силы тока в обмотках электрической машины, другие измерительные сигналы также могут подключаться к интерфейсу, например измерительные сигналы, представляющие напряжение питания силовой электроники двигателя, и/или измерительный сигнал, представляющий положение, частоту вращения и/или действующий вращающий момент двигателя. К тому же, измерительные сигналы, относящиеся к режимам работы компрессора, таким как транзитное давление, поток, температура, вибрации и/или шумы, могут подаваться в блок цифрового ввода/вывода. Посредством использования процессора общего применения, различные измерительные сигналы могут подключаться к устройству обработки просто. В дополнение, по выбору, силовая электроника разных электрических машин может регулироваться только одним устройством обработки. Вместо измерительных сигналов, представляющих различные физические величины, электрическая машина также может регулироваться с помощью измерительных сигналов, представляющих только электрические токи через одну или многочисленное количество обмоток двигателя переменного тока. Это предоставляет возможность экономии на датчиках, которая дает не только преимущество в себестоимости, но также и повышение надежности. Для получения устойчивого регулирования, например, может производиться использование математической модели двигателя.
Отмечено, что устройство обработки согласно изобретению может использоваться с электрическими машинами, которые имеют либо единственную обмотку, либо многочисленные обмотки, например, для трехфазного питания. Кроме того, устройство обработки может использоваться на электрической машине, приводящей в действие другое устройство, такое как приводные механизмы робота, вместо компрессора.
Дополнительные преимущественные варианты осуществления изобретения описаны в зависимых пунктах формулы изобретения.
Изобретение будет пояснено более подробно со ссылкой на примерные варианты осуществления, показанные на чертежах, на которых:
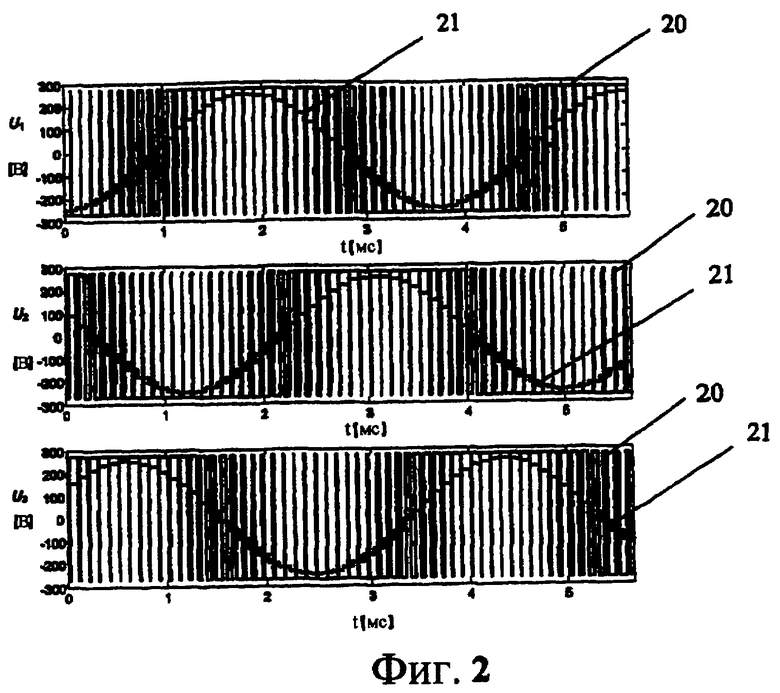
фиг. 1 показывает схему устройства обработки согласно изобретению;
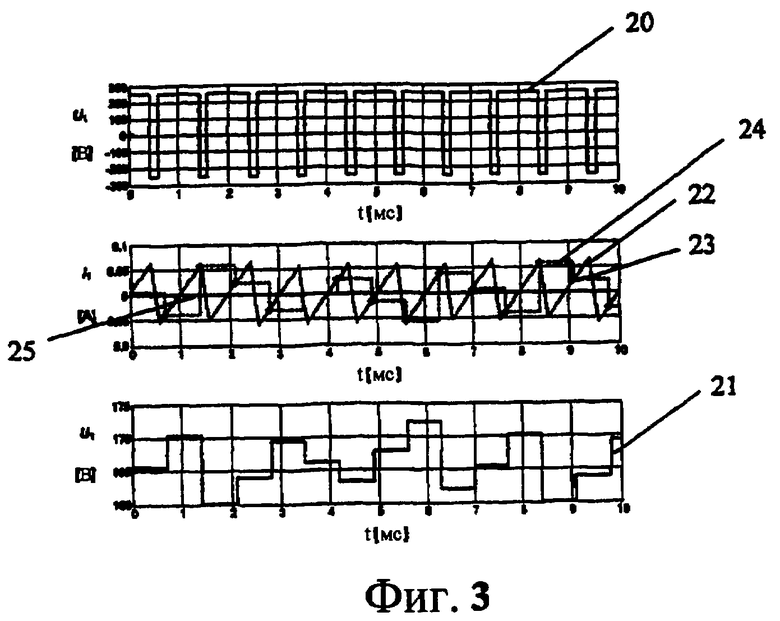
фиг. 2 показывает графическое представление сигнала управления согласно изобретению;
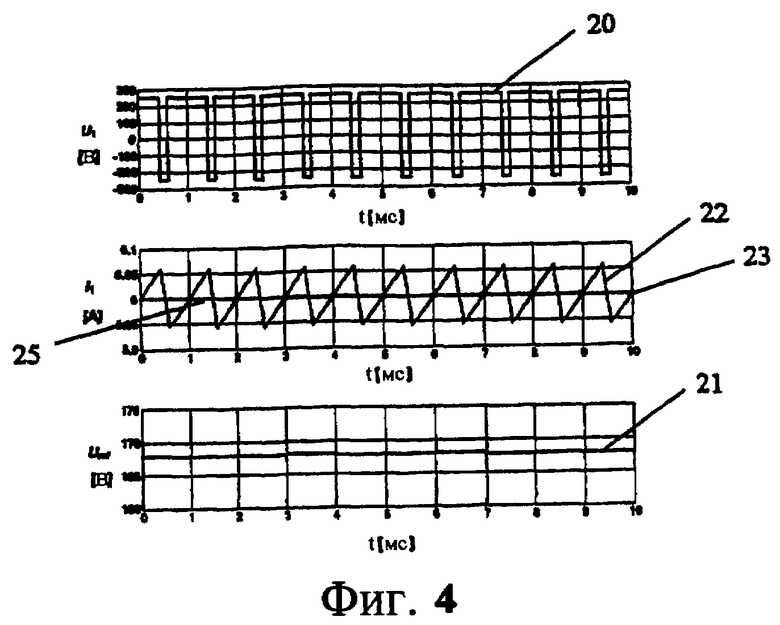
фиг. 3 показывает некоторое количество сигналов, имеющих место в устройстве обработки по фиг. 1; и
фиг. 4 также показывает некоторое количество сигналов, имеющих место в устройстве обработки по фиг. 1.
Фигуры являются только схематическими представлениями изобретения и даны исключительно в качестве неограничивающих примеров.
Фиг. 1 показывает схему устройства 1 обработки согласно изобретению. Устройство 1 обработки содержит блок расчета, который сконструирован в качестве процессора 2 общего применения, также называемого PC-совместимым процессором, таким как настольный ПК, PC/104, Compact PCI, промышленный ПК, системная плата ПК и тому подобное. Кроме того, устройство 1 обработки содержит интерфейс, который содержит FPGA 3 (программируемую пользователем вентильную матрицу). Конечно, вместо FPGA 3, интерфейс также может содержать другой тип, например, PLD (программируемое логическое устройство). Кроме того, интерфейс содержит аналого-цифровой преобразователь 4 с многочисленным количеством контактов 5a-5e для датчиков. FPGA 3 предусмотрена на плате 3a с печатной схемой. FPGA 3 имеет цифровые клеммы для связи с процессором 2 общего применения.
Процессор 2 общего применения смонтирован на стандартной системной плате 6. FPGA 3 присоединена к процессору 2 через шину PCI (соединения периферийных компонентов), так что получается относительно недорогая и гибкая реализация. Передача данных между FPGA 3 и процессором 2, символически указанная двойной стрелкой 7 на фиг. 1, таким образом, может выполняться быстро и надежно. Вместо раздельной конструкции, FPGA 3 и процессор 2 также могут быть интегрированы на одной плате с печатной схемой, так что получается компактное устройство, а передача данных потенциально может выполняться, еще быстрее и надежнее. Кроме того, аналого-цифровой преобразователь 4 может быть реализован либо как целая часть с FPGA 3 на плате 3a с печатной схемой или, по требованию, отдельно от нее.
Однако также возможно размещать как процессор 2, так и FPGA 3 и аналого-цифровой преобразователь 4 в стандартном ПК 8, например, для загрузки исходного кода.
Устройство 1 обработки регулирует привод объекта, сконструированного в виде двигателя 9 переменного тока, который управляется силовой электроникой, как будет более подробно описано ниже. Двигатель 9 переменного тока, например, имеет номинальную частоту вращения приблизительно в 80000 оборотов в минуту, например, при 500 кВт и приводит в действие компрессор 10. Трехфазное питание 11a-11c присоединено к выпрямителю 12. На выводах выпрямителя 12, расположен первый датчик, который формирует измерительный сигнал, представляющий напряжение постоянного тока. Через контакт 5a аналого-цифрового преобразователя 4, измерительный сигнал вводится в устройство 1 обработки. Кроме того, преобразователь 14 широтно-импульсной модуляции (ШИМ, PWM) присоединен к выходам выпрямителя 12 через формирователь. Преобразователь 14 ШИМ содержит силовую электронику для формирования, в зависимости от сигналов управления, высокочастотного силового напряжения, которое подается на обмотки двигателя 9 переменного тока. Силовая электроника, таким образом, присоединена к цифровым выходам FPGA 3 через формирователь и, соответственно, получает сигналы управления, которые сформированы устройством 1 обработки. Формирователь может быть предусмотрен в или с преобразователем 14 ШИМ. Однако также возможно размещать формирователь где-то в другом месте, например на выходе аналого-цифрового преобразователя 4. Выходы преобразователя 14 ШИМ присоединены к обмоткам двигателя 9 через датчики 15, 16 тока, например датчики Холла или датчики с шунтом. Датчики 15, 16 тока присоединены к аналого-цифровому преобразователю 14 через клеммы 5b, 5c для обработки измерительных сигналов, а именно электрических токов, которые имеют отношение к режиму работы электрической машины. Кроме того, по выбору, на валу двигателя 9 предусмотрены датчики 17 для измерения других режимов работы, таких как положение вала и/или частота вращения двигателя. В дополнение, по выбору, датчики предусмотрены в и/или с турбиной 10 для выполнения измерений, например, над транзитным давлением, потоком, температурой, вибрациями и/или шумами в турбине. Датчики 17 на валу двигателя 9 и в и/или с турбиной 10 присоединены к аналого-цифровому преобразователю 4 через клеммы 5d, 5e.
Посредством аналого-цифрового преобразователя 4, измерительные сигналы, сформированные датчиками, могут быть представлены на дискретных уровнях, так что после выборки получается цифровой сигнал. Цифровые сигналы передаются в процессор 2 через каналы 7 связи на плате 6 с печатной схемой. Поскольку процессор 2 общего применения снабжен системой управления реального времени, этапы обработки в реальном времени могут выполняться над оцифрованными измерительными сигналами. В зависимости от оцифрованных измерительных сигналов, процессор 2 формирует сигнал управления. Сигнал управления затем передается в силовую электронику преобразователя 14 ШИМ через FPGA 3.
Фиг. 2 показывает некоторое количество графических представлений сигналов 20 управления для трехфазного двигателя, где напряжения u1, u2 и u3, выраженные вольтажом, В, показаны в качестве функции времени, выраженного в миллисекундах, мс. Фигуры, таким образом, показывают сигналы, последовательно, для фазы 1, фазы 2 и фазы 3 электродвигателя 9. Сигнал 20 управления является импульсным широтно-модулированным сигналом и представляет управляющее напряжение, подаваемое на схему электродвигателя. Среднее по времени импульсного широтно-модулированного сигнала является требуемым опорным напряжением 21, которое рассчитано процессором 2. Вследствие индуктивного характера электродвигателя, отслеживается только среднее по времени значение сигнала 20 управления, тогда как более высокие временные гармонические компоненты отфильтровываются.
Фиг. 3 показывает некоторое количество сигналов более подробно. Ради простоты, было предпочтено показывать сигналы, которые относятся к электродвигателю постоянного тока на фиг. 3 и 4. В случае двигателя переменного тока, характер изменения сигналов является подобным. Таким образом, на верхнем графике показан сигнал (U 1) 20 управления. Этот сигнал является симметричным импульсным широтно-модулированным, так что сигнал принимает высокое значение возле центра периода импульсного кода. Конечно, также возможно проектировать модуляцию по-другому, например асимметрично. Поскольку электродвигатель ведет себя индуктивным образом, электрический ток в обмотках возрастает, по существу линейно, когда управляющее напряжение является положительным, и электрический ток падает, когда управляющее напряжение является отрицательным. Это показано на центральном графике по фиг. 3. Здесь, электрический ток 22 указан как I 1. Электрический ток 22, по существу, имеет пилообразный профиль, который наложен на постоянное напряжение, именно в случае двигателя постоянного тока, или на гармонический сигнал, именно в случае двигателя, который приводится в действие напряжением переменного тока.
В первом варианте осуществления, выборка производилась в моменты 23 времени, указанные полужирной точкой в центре графика по фиг. 3. Значения электрического тока, измеренные в моменты 23 времени выборки, изменяются незначительно в результате пилообразного профиля электрического тока 22. Здесь, для расчета управляющего сигнала 21 в периоде импульсного кода, сопровождающем период, в котором измерялся электрический ток 22, предполагается всегда постоянное значение 24 электрического тока 22. Поэтому это постоянное значение 24 совершает скачки в результате случайных моментов времени выборки в периоде импульсного кода. Поскольку среднее электрического тока 22 в пределах периода импульсного кода является виртуально постоянным, виртуально постоянный опорный ток 25 имел бы результатом практически такой же режим работы двигателя. В настоящем изобретении, опорное напряжение 21 будет вводить поправку на слегка неустойчивое поведение электрического тока 24, предполагаемого постоянным в пределах периода импульсного кода. На нижнем графике по фиг. 3 показано введение поправки опорного напряжения 21, указанного как U ref.
Во втором варианте осуществления, момент времени выборки электрического тока 22 синхрован с сигналом 20 управления и из условия, чтобы электрический ток 22 измерялся в центре периода импульсного кода. Поскольку сигнал 20 управления симметричен, электрический ток 22 в центре периода импульсного кода равен действительному значению тока. Выборкой в вышеупомянутый момент времени, супергармонические составляющие электрического тока 22 отфильтровываются так, что регулирование становится более устойчивым. Это показано на фиг. 4, где три графика показывают такие же сигналы, как на фиг. 3. Ясно видно, что подвергнутый выборке электрический ток 23 является виртуально постоянным и совпадает с виртуально постоянным опорным током 25. Следовательно, введение поправки управляющего напряжения 21 также является практически постоянным, каковое препятствует флуктуациям частоты в частоте вращения двигателя 9 и чрезмерным потерям в двигателе вследствие нагрева. Для реализации синхронной выборки, тактовый сигнал процессора регулируется посредством FPGA с помощью контакта 18 прерывания.
Отмечено, что мощность, потребляемая процессором 2, незначительна при использовании компрессоров 10 с относительно большой мощностью. Для того чтобы получить большую надежность устройства 1 обработки, часть критичных по времени функциональных возможностей реализована в FPGA 3.
Изобретение не ограничено вышеописанным примерным вариантом осуществления. Возможны многие варианты.
Таким образом, устройство обработки может быть выполнено с возможностью для обработки измерительного сигнала, который, вместо присоединения к силовой электронике электрической машины, присоединенной к силовой электронике, присоединяется к силовой электронике активного входного каскада инвертора для снижения коэффициента гармоник электрического управления или магнитной подшипниковой системы компрессора.
Кроме того, многочисленное количество FPGA может использоваться вместо только одной FPGA. К тому же, вместо двигателя переменного тока может использоваться двигатель постоянного тока. В дополнение, возможно выполнить устройство обработки с возможностью для обработки измерительных сигналов, имеющих отношение к силовой электронике многочисленного количества электрических машин.
Такие варианты будут очевидны специалисту и подразумеваются находящимися в пределах объема изобретения, который изложен в последующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДЕМПФИРОВАНИЯ КРУТИЛЬНОГО КОЛЕБАНИЯ БЕЗ ИСПОЛЬЗОВАНИЯ ДАТЧИКОВ | 2011 |
|
RU2559200C2 |
| ПОДВОДНАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 2008 |
|
RU2488850C2 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ТЯГОВОГО УСИЛИЯ ДЛЯ НЕСКОЛЬКИХ ЭЛЕКТРОСЕКЦИЙ | 2015 |
|
RU2641558C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| РЕГУЛИРОВАНИЕ ЭЛЕКТРИЧЕСКОГО ВЫХОДА ГЕНЕРАТОРА | 2014 |
|
RU2670421C2 |
| Универсальная объектно-ориентированная мультиплатформенная система автоматической диагностики и мониторинга для управления состоянием и предупреждения аварий оборудования опасных производственных и транспортных объектов | 2019 |
|
RU2728167C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ СЧЁТЧИК ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ СТАТИЧЕСКИЙ | 2018 |
|
RU2695451C1 |
| АНАЛИТИЧЕСКИЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2014 |
|
RU2674420C2 |
| СТРУКТУРА ПАРАЛЛЕЛЬНОГО МОДУЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ | 2015 |
|
RU2701157C2 |
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ОБЪЕКТАМИ ДОБЫЧИ | 2020 |
|
RU2783937C1 |
Изобретение относится к области электротехники и может быть использовано в устройстве обработки измерительного сигнала, имеющего отношение к режиму объекта, управляемого силовой электроникой. Техническим результатом является возможность выполнения относительно большого количества этапов обработки в режиме реального времени относительно высоких собственных частот электрической машины. Устройство обработки содержит интерфейс с цифровыми клеммами, при этом интерфейс снабжен, по меньшей мере, одной клеммой для датчика, который формирует измерительный сигнал. Кроме того, устройство обработки содержит блок расчета, к которому присоединен интерфейс. Блок расчета оснащен системой управления реального времени. В дополнение, блок расчета содержит процессор общего применения. 12 з.п. ф-лы, 4 ил.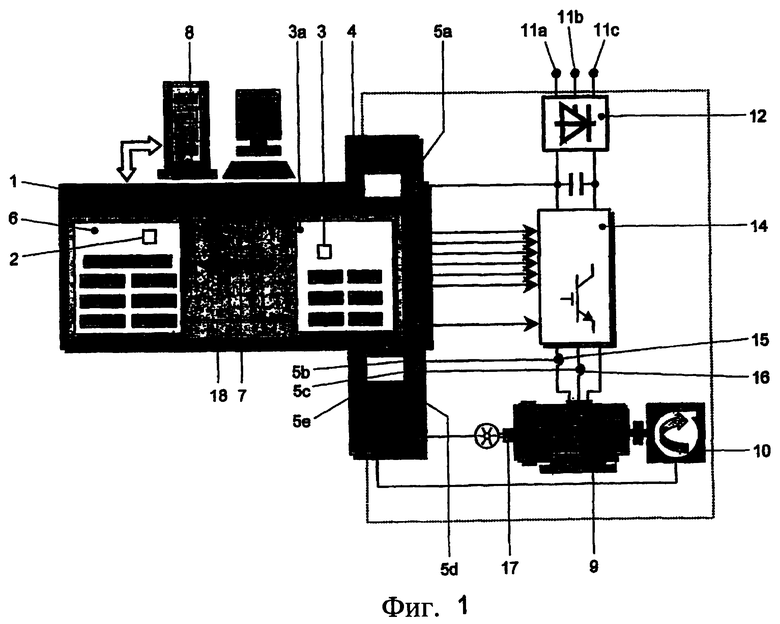
1. Устройство для обработки измерительного сигнала, имеющего отношение к режимам работы объекта, управляемого силовой электроникой, содержащее блок связи с цифровыми терминалами, при этом блок связи снабжен, по меньшей мере, одним терминалом для датчика, который формирует измерительный сигнал, и при этом блок связи соединен с преобразователем широтно-импульсной модуляции (PWM), содержащим силовую электронику; и вычислительный блок, к которому присоединен блок связи, причем вычислительный блок оснащен системой управления в режиме реального времени, и при этом вычислительный блок содержит процессор общего применения.
2. Устройство по п.1, выполненное с возможностью формирования в зависимости от измерительного сигнала сигнала управления для регулирования объекта, управляемого силовой электроникой.
3. Устройство по п.1, в котором объект, управляемый силовой электроникой, содержит электрическую машину.
4. Устройство по п.3, в котором электрическая машина имеет высокую номинальную мощность.
5. Устройство по п.4, в котором электрическая машина содержит двигатель переменного тока, который оперативно приводит в действие компрессор.
6. Устройство по п.1, в котором блок связи снабжен терминалом для передачи сигнала управления в средство коммутации силовой электроники.
7. Устройство по п.1, в котором измерительный сигнал представляет собой электрический ток через обмотку электрической машины.
8. Устройство по п.1, в котором блок связи выполнен с возможностью приема множества измерительных сигналов, которые имеют отношение к режимам объекта, управляемого силовой электроникой.
9. Устройство по п.1, выполненное с возможностью формирования в зависимости от измерительных сигналов сигнала управления, который представляет собой только электрические токи через одну или множество обмоток электрической машины.
10. Устройство по п.1, в котором процессор общего применения синхронизирован с обработкой выборки измерительного сигнала.
11. Устройство по п.1, в котором блок связи содержит, по меньшей мере, один блок цифрового ввода/вывода и, по меньшей мере, один аналого-цифровой преобразователь.
12. Устройство по п.11, в котором блок цифрового ввода/вывода содержит FPGA (программируемую пользователем вентильную матрицу).
13. Устройство по п.11, в котором блок цифрового ввода/вывода интегрирован с вычислительным блоком на одной плате с печатной схемой.
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ С ШИМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2091979C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2004 |
|
RU2254666C1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| US 6700356 В1, 02.03.2004 | |||
| US 20040135533 А1, 15.07.2004 | |||
| US 2005068001 A1, 31.03.2005 | |||
| ПОЛИ(МЕТ)АКРИЛАТНЫЕ СОПОЛИМЕРЫ С РАЗВЕТВЛЕННЫМИ С17 АЛКИЛЬНЫМИ ЦЕПЯМИ И ИХ ПРИМЕНЕНИЕ В КОМПОЗИЦИЯХ СМАЗОЧНОГО МАСЛА | 2017 |
|
RU2729517C2 |
| Кассетодержатель для переналадки намоточных устройств станков типа с4-16 | 1978 |
|
SU734115A1 |
| WO 9842770 A1, 24.09.1998. | |||

