Изобретение относится к области электротехники и может быть использовано в электроприводе для регулирования частоты вращения асинхронных двигателей, как с короткозамкнутым ротором, так и с фазным ротором.
Известны следующие технические решения – аналоги заявляемого:
– Регулирующее устройство для привода с асинхронным двигателем (патент RU 2 222 097 C2, опубл. 20.01.2004);
– устройство, реализующее Способ управления асинхронным двигателем (патент RU 2 402 865 C1, опубл. 27.10.2010);
– устройство, реализующее Способ частотного управления асинхронным электроприводом (патент RU 2 626 325 C1, опубл. 26.07.2017).
Общим техническим недостатком указанных устройств–аналогов является довольно сложная конструкция каждого из них. Соответственно их массо–габаритные показатели оказываются соизмеримыми, если не более самого электродвигателя, которым они должны «управлять». О стоимости реализации данных устройств говорить и вовсе не приходится.
В качестве прототипа заявляемого технического решения был выбран регулятор частоты вращения асинхронного двигателя, описанный в (патент RU 2 055 443 C1, опубл. 27.02.1996).
Оно содержит соединенный с регулятором асинхронный двигатель, состоящий из статора и ротора, переключатель, способный коммутировать не менее трех фаз, кнопки «Пуск» и «Стоп», первый и второй встречно-параллельно включенные тиристоры, которые введены в одну фазу, а также третий и четвертый встречно-параллельно включенные тиристоры, которые введены в другую фазу.
Недостатком данного устройства является невозможность с его помощью поддерживать заданную частоту вращения ротора соединенного с регулятором асинхронного двигателя с требуемой точностью.
Асинхронные двигатели ныне широко применяются для приведения в действие самых различных механизмов: насосов, вентиляторов, компрессоров, транспортеров и других подобных устройств. При этом хорошей инженерной практикой является то обстоятельство, что двигатели, которые используются в электроприводах, берутся несколько большей мощности, чем это требуется собственно для вращения механизма. Да и сами данные механизмы тоже обычно проектируются и выбираются «с запасом» – чтобы обеспечить работу в наиболее тяжелых режимах функционирования установки.
В условиях реальной эксплуатации от таких механизмов далеко не все время требуется работать «на полную мощность». В «пиковых» режимах они эксплуатируются, как правило, очень не долго. Поэтому по экономическим соображениям было бы лучше, если бы они в течение весьма продолжительного времени работали на своих «долевых» режимах, то есть в условиях не полной своей загрузки. При этом потребляемая из сети мощность, как и производимая механизмом работа, как правило, являются функцией частоты вращения асинхронного двигателя, приводящего механизм в движение.
Технический результат, достигаемый заявляемым техническим решением, состоит в обеспечении возможности обслуживающему персоналу устанавливать такую частоту вращения электродвигателя, которая могла бы обеспечить оптимальную загрузку приводимого в движение механизма, тем самым, экономя потребляемую из сети электроэнергию, а также моторесурс механизма.
Поставленная задача решается следующим образом.
Регулятор частоты вращения асинхронного двигателя состоящего из статора и ротора, содержащий переключатель, способный коммутировать не менее трех фаз, кнопки «Пуск» и «Стоп», первый и второй встречно-параллельно включенные тиристоры, которые введены в одну фазу, третий и четвертый встречно-параллельно включенные тиристоры, которые введены в другую фазу, отличающийся тем, что кнопки «Пуск» и «Стоп» соединены с соответствующими контактами первого микроконтроллера, с еще одним контактом которого соединен первый модуль беспроводной связи.
Анод светодиода первого оптрона соединен с соответствующим контактом первого микроконтроллера. Первый электрод фотоприемника первого оптрона соединен с катодом первого тиристора. Второй электрод фотоприемника первого оптрона соединен с управляющим электродом первого тиристора.
Анод светодиода второго оптрона соединен с соответствующим контактом первого микроконтроллера. Первый электрод фотоприемника второго оптрона соединен с катодом второго тиристора. Второй электрод фотоприемника второго оптрона соединен с управляющим электродом второго тиристора.
Анод светодиода третьего оптрона соединен с соответствующим контактом первого микроконтроллера. Первый электрод фотоприемника третьего оптрона соединен с катодом третьего тиристора. Второй электрод фотоприемника третьего оптрона соединен с управляющим электродом третьего тиристора.
Анод светодиода четвертого оптрона соединен с соответствующим контактом первого микроконтроллера. Первый электрод фотоприемника четвертого оптрона соединен с катодом четвертого тиристора. Второй электрод фотоприемника четвертого оптрона соединен с управляющим электродом четвертого тиристора.
Второй микроконтроллер, предназначенный для расположения на асинхронном двигателе, одним из контактов соединен со вторым модулем беспроводной связи, другим контактом соединен с терморезистором, также предназначенным для расположения на асинхронном двигателе, а третий и четвертый контакты второго микроконтроллера соединены с электродами фотоприемника оптрона с открытым оптическим каналом.
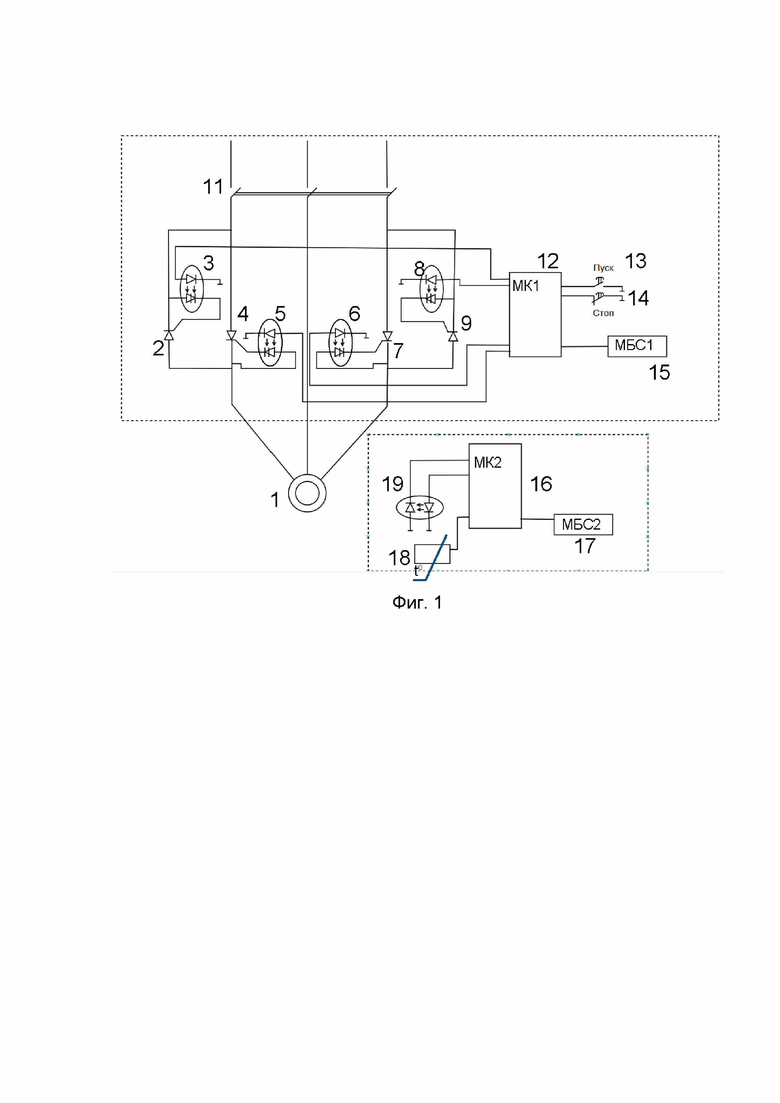
Более подробно заявляемое техническое решение раскрывается в приведенном ниже примере реализации и иллюстрируется на фиг. 1, где представлена принципиальная электрическая схема предлагаемого регулятора частоты вращения асинхронного двигателя.
На фиг. 1 представлены: статор и ротор соединенного с регулятором асинхронного двигателя (1), переключатель (11), способный коммутировать не менее трех фаз, кнопки «Пуск» (13) и «Стоп» (14), первый (2) и второй (4) встречно-параллельно включенные тиристоры, которые введены в одну фазу. Третий (7) и четвертый (9) встречно-параллельно включенные тиристоры, которые введены в другую фазу. При этом кнопки «Пуск» (13) и «Стоп» (14) соединены с соответствующими контактами первого микроконтроллера (12), с еще одним контактом которого соединен первый модуль беспроводной связи (15).
Анод светодиода первого оптрона (3) соединен с соответствующим контактом первого микроконтроллера (12). Первый электрод фотоприемника первого оптрона (3) соединен с катодом первого тиристора (2). Второй электрод фотоприемника первого оптрона (3) соединен с управляющим электродом первого тиристора (2).
Анод светодиода второго оптрона (5) соединен с соответствующим контактом первого микроконтроллера (12). Первый электрод фотоприемника второго оптрона (5) соединен с катодом второго тиристора (4). Второй электрод фотоприемника второго оптрона (5) соединен с управляющим электродом второго тиристора (4).
Анод светодиода третьего оптрона (6) соединен с соответствующим контактом первого микроконтроллера (12). Первый электрод фотоприемника третьего оптрона (6) соединен с катодом третьего тиристора (7). Второй электрод фотоприемника третьего оптрона (6) соединен с управляющим электродом третьего тиристора (7).
Анод светодиода четвертого оптрона (8) соединен с соответствующим контактом первого микроконтроллера (12). Первый электрод фотоприемника четвертого оптрона (8) соединен с катодом четвертого тиристора (9). Второй электрод фотоприемника четвертого оптрона (8) соединен с управляющим электродом четвертого тиристора (9).
Все перечисленные выше компоненты размещены в одном корпусе, который обозначен на фиг. 1 пунктиром и далее условно именуется «пускатель». Другие компоненты регулятора, речь о которых пойдет ниже, размещаются в непосредственной близости от регулируемого асинхронного двигателя (1). На фиг. 1 они также обведены пунктиром и для удобства далее будут называться «датчиком».
На соединенном с регулятором асинхронном двигателе (1) располагается второй микроконтроллер (16), с одним из контактов которого соединен второй модуль беспроводной связи (17). С другим контактом второго микроконтроллера соединен терморезистор (18), расположенный на соединенном с регулятором асинхронном двигателе (1). С соответствующими контактами второго микроконтроллера соединены электроды фотоприемника оптрона (19) с открытым оптическим каналом, который прерывается по мере вращения ротора соединенного с регулятором асинхронного двигателя (1).
В качестве первого (15) и второго (17) модулей беспроводной связи могут быть использованы соответствующие микросхемы для передачи сигналов WiFi и (или) Bluetooth.
Таким образом, предлагаемый регулятор частоты вращения асинхронного двигателя (1) конструктивно выполняется из двух блоков: «пускателя», к которому из сети подводится питающий кабель, и «датчика», предназначенного для размещения на электродвигателе, получающем питание от «пускателя». «Датчик» с «пускателем» связываются между собой по радиоканалу WiFi и (или) Bluetooth. Подача питания электронных компонентов «датчика» осуществляется от кабеля, соединяющего «пускатель» с асинхронным двигателем (1). Для упрощения схемы цепи питания электронных компонентов «пускателя» и «датчика» на фиг. 1 не показаны.
Схема, представленная на фиг. 1, работает следующим образом.
После замыкания контактов переключателя (11) на электронные компоненты регулятора подается питание. Первый микроконтроллер (12) будет готов осуществлять свои функции по завершении необходимых переходных процессов, что может занять небольшой промежуток времени, в пределах одной или нескольких секунд.
Запуск асинхронного двигателя (1) может быть реализован путем нажатия кнопки «Пуск» (13) либо по соответствующей команде оператора, переданной с помощью модуля беспроводной связи (15) со смартфона или какого-либо другого устройства, где установлено соответствующее программное обеспечение и подключен аналогичный модуль.
С помощью тех же устройств (то есть, модуля беспроводной связи (15) и смартфона или какого-либо другого устройства, где установлено соответствующее программное обеспечение и подключен аналогичный модуль) в регулятор может быть введена (задана) требуемая частота вращения асинхронного двигателя (1) и, при необходимости, осуществлена его дистанционная остановка.
Вручную асинхронный двигатель (1) может быть остановлен нажатием кнопки «Стоп» (14) либо (в экстренных случаях) размыканием переключателя (11).
После получения команды на запуск асинхронного двигателя (1) первый микроконтроллер (12) подает питание на светодиоды первого (3), второго (5), третьего (6) и четвертого (8) оптронов. Их включение вызывает срабатывание соответствующих фотоприемников, что приведет к подаче питания на управляющие электроды первого (2), второго (4), третьего (7) и четвертого (9) тиристоров. Каждый тиристор перейдет в проводящее состояние, что вызовет протекание токов в обмотках асинхронного двигателя (1) и появление на его валу электромагнитного момента.
Асинхронный двигатель (1) придет во вращение, если создаваемый в нем электромагнитный момент будет больше момента сопротивления на его валу.
Вращение ротора асинхронного двигателя (1) вызовет прерывания в открытом оптическом канале оптрона (19), которые будут пересчитываться вторым микроконтроллером (16) в частоту вращения асинхронного двигателя (1).
Полученные значения частоты вращения асинхронного двигателя (1) через второй (17) и первый (15) модули беспроводной связи будут регулярно передаваться в первый микроконтроллер (12), где они будут сравниваться с требуемой (заданной) частотой вращения.
Когда электродвигатель наберет необходимые обороты и полученное из первого модуля беспроводной связи (15) значение частоты вращения превысит заданную величину, микроконтроллер (12) обесточит светодиоды первого (3), второго (5), третьего (6) и четвертого (8) оптронов.
Их отключение переведет соответствующие фотоприемники в не проводящее состояние. В результате чего первый (2), второй (4), третий (7) и четвертый (9) тиристоры также перейдут в не проводящее состояние, как только протекающие по ним токи станут менее токов удержания этих тиристоров. При питающей частоте сети 50 Гц на это потребуется не более 0,02 с.
Обесточенный электродвигатель тем временем продолжит вращаться по инерции, постепенно снижая свои обороты («на выбеге»).
Через установленный (небольшой) промежуток времени первый микроконтроллер (12) вновь подаст питание на светодиоды первого (3), второго (5), третьего (6) и четвертого (8) оптронов.
Указанный промежуток времени может составлять от одной до нескольких секунд или десятков секунд. Он должен быть тем меньше, чем по условиям эксплуатации установки требуется более точно поддерживать заданную частоту вращения, а также чем меньшим моментом инерции обладает ротор асинхронного двигателя вместе с вращающимися массами соединенного электродвигателем механизма.
Величина этого промежутка времени, в течение которого асинхронный двигатель (1) будет вращаться по инерции в обесточенном состоянии, вводится в первый микроконтроллер (12) также с помощью модуля беспроводной связи (15) со смартфона или какого-либо другого устройства, где установлено соответствующее программное обеспечение и подключен аналогичный модуль.
Вновь первый (2), второй (4), третий (7) и четвертый (9) тиристоры перейдут в проводящее состояние. В асинхронном двигателе (1) снова начнет создаваться электромагнитный момент. Двигатель снова начнет ускорять свое вращение, если электромагнитный момент на его валу будет больше момента сопротивления.
Вновь измеренные с помощью оптрона с открытым оптическом каналом (19) и второго микроконтроллера (16) значения частоты вращения асинхронного двигателя (1) через второй (17) и первый (15) модули беспроводной связи начнут регулярно передаваться в первый микроконтроллер (12), где они опять будут сравниваться с заданной частотой вращения – до тех пор, пока не превысят ее.
Как только полученное из первого модуля беспроводной связи (15) значение частоты вращения асинхронного двигателя (1) окажется больше заданной, первый микроконтроллер (12) снова обесточит светодиоды первого (3), второго (5), третьего (6) и четвертого (8) оптронов. Соответственно, первый (2), второй (4), третий (7) и четвертый (9) тиристоры перейдут в не проводящее состояние, и асинхронный двигатель (1) будет снова обесточен, все же продолжая вращаться по инерции («на выбеге»).
Далее, через заданный промежуток времени первый микроконтроллер (12) вновь подаст питание на светодиоды первого (3), второго (5), третьего (6) и четвертого (8) оптронов.
Описанный цикл перезапусков асинхронного двигателя (1) будет повторяться вновь и вновь – до тех пор, пока не поступит команда на отключение электродвигателя (см. выше) или на изменение заданной частоты вращения.
В последнем случае, если вновь введенное значение заданной частоты вращения будет больше той, что ей предшествовало, команда на отключение электродвигателя первым микроконтроллером (12) просто будет подана немного позднее, когда асинхронный двигатель (1) разгонится до вновь заданных оборотов.
Если вновь введенное значение заданной частоты вращения окажется меньше той, что ей предшествовало, асинхронный двигатель (1) будет тормозиться «на выбеге», двигаясь по инерции, и достигнет заданных оборотов после одной или нескольких попыток его перезапуска со стороны первого микроконтроллера (12). Число таких попыток будет определяться тем, как долго измеряемая при каждом новом перезапуске частота вращения будет оказываться более вновь установленной.
Таким образом под действием предлагаемого регулятора асинхронный двигатель (1) будет работать в так называемом повторно – кратковременном режиме, при котором частота его вращения будет незначительно меняться около своего заданного значения.
При этом в случаях, когда задаваемая оператором частота вращения будет существенно ниже номинальной, асинхронный двигатель (1) будет потреблять из сети слишком большие реактивные токи, которые могут вызвать его нагрев, превышающий допустимое значение. Как известно, наиболее «слабым звеном» в этом плане является изоляция обмоток электродвигателя.
Измеренная с помощью терморезистора (18) температура асинхронного двигателя (1) «пересчитывается» во втором микроконтроллере (16), а затем через второй (17) и первый (15) модули беспроводной связи поступает в первый микроконтроллер (12), где она должна сравниваться с допустимым значением.
Допустимое значение температуры асинхронного двигателя (1) зависит от его конструкции, а также температуры окружающей среды. Оно также может быть введено в первый микроконтроллер (12) с помощью модуля беспроводной связи (15) со смартфона или какого-либо другого устройства, где установлено соответствующее программное обеспечение и подключен аналогичный модуль.
Если температура асинхронного двигателя (1) окажется больше допустимого значения, первый микроконтроллер (12) обесточит светодиоды первого (3), второго (5), третьего (6) и четвертого (8) оптронов, тем самым отключив электродвигатель от сети.
Сразу после этого на смартфон(ы) обслуживающего персонала и (или) другое(ие) устройство(а), с помощью которого(ых) осуществлялось управление предлагаемым регулятором, будет направлено сообщение о произошедшем.
Представленное описание позволяет твердо утверждать, что реализация заявляемого технического решения безусловно обеспечивает решение задачи поддержания частоты вращения асинхронного двигателя на заданном уровне и с заданной точностью.
Эксплуатирующий персонал с помощью смартфона или какого-либо другого устройства, где установлено соответствующее программное обеспечение и подключен модуль беспроводной связи типа WiFi и (или) Bluetooth, благодаря его внедрению, получает возможность настраивать частоту вращения электропривода на оптимальную производительность с точки зрения работы установки в целом. Данное обстоятельство не только позволит предотвратить бесполезное расходование электроэнергии из сети, но также экономить моторесурс механизма, приводимого в движение асинхронным двигателем.
Размещение на асинхронном двигателе (1) компонентов «датчика» регулятора не потребует внесения сколь-нибудь существенных изменений в конструкцию этого электродвигателя.
Более того, неисправность датчика или даже полное его отсутствие превращает предлагаемый регулятор по оставшимся в нем функциям в обычный магнитный пускатель, подобный тем, что изготавливаются на элементной базе контакторов и широко используются в современных электроприводах.
При этом массо – габаритные показатели «пускателя» предлагаемого регулятора будут определяться, в первую очередь, конструкцией и размерами переключателя (11), а также охладителей, которые могут потребоваться для обеспечения устойчивой работы силовых тиристоров (2), (4), (7) и (9). Поэтому при определенных условиях размеры корпуса «пускателя» регулятора могут оказаться даже меньше аналогичного с ним по типоразмеру магнитного пускателя, реализованного на элементной базе контакторов, а стоимость предлагаемого «пускателя» – соизмерима с ним.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор частоты вращения асинхронного двигателя | 2022 |
|
RU2779636C1 |
| КОМПЛЕКС АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КОНВЕЙЕРАМИ | 2016 |
|
RU2657527C2 |
| Асинхронный электродвигатель с фазным ротором | 2024 |
|
RU2828482C1 |
| Устройство для управления трехфазным асинхронным электродвигателем | 1989 |
|
SU1735991A1 |
| Устройство для управления реверсивным электродвигателем | 1987 |
|
SU1504775A1 |
| Устройство для управления реверсивным электроприводом | 1988 |
|
SU1603514A1 |
| Зарядное устройство для батареи литиевых аккумуляторов | 2024 |
|
RU2828483C1 |
| Устройство для управления асинхронным электродвигателем | 1990 |
|
SU1758818A1 |
| Устройство для торможения трехфазного асинхронного электродвигателя | 1989 |
|
SU1624645A1 |
| Электропривод | 1986 |
|
SU1348969A1 |
Изобретение относится к электротехнике. Технический результат заключается в энергосбережении и повышении моторесурса механизма за счет установки такой частоты вращения электродвигателя, которая обеспечит оптимальную загрузку приводимого в движение механизма. Регулятор частоты вращения асинхронного двигателя (1) конструктивно выполняется из двух блоков: пускателя, к которому из сети подводится питающий кабель, и датчика, размещаемого на электродвигателе, получающем питание от пускателя. Датчик с пускателем связываются между собой по радиоканалу, например по WiFi и (или) Bluetooth. Для упрощения схемы цепи питания электронных компонентов пускателя и датчика не показаны. Пускатель обеспечивает подключение/отключение асинхронного двигателя (1) к/от питающей сети и состоит из: переключателя (11), силовых тиристоров (2), (4), (7) и (9), примененных для гальванической развязки оптронов (3), (5), (6) и (8), первого микроконтроллера (12), кнопок Пуск (13) и Стоп (14), а также первого модуля беспроводной связи (15). Датчик размещается на электродвигателе, с помощью терморезистора (18) измеряет его температуру, а через оптрон с открытым оптическим каналом (19) – частоту вращения ротора. Он включает в себя также второй микроконтроллер (16) и второй модуль беспроводной связи (17). 1 ил.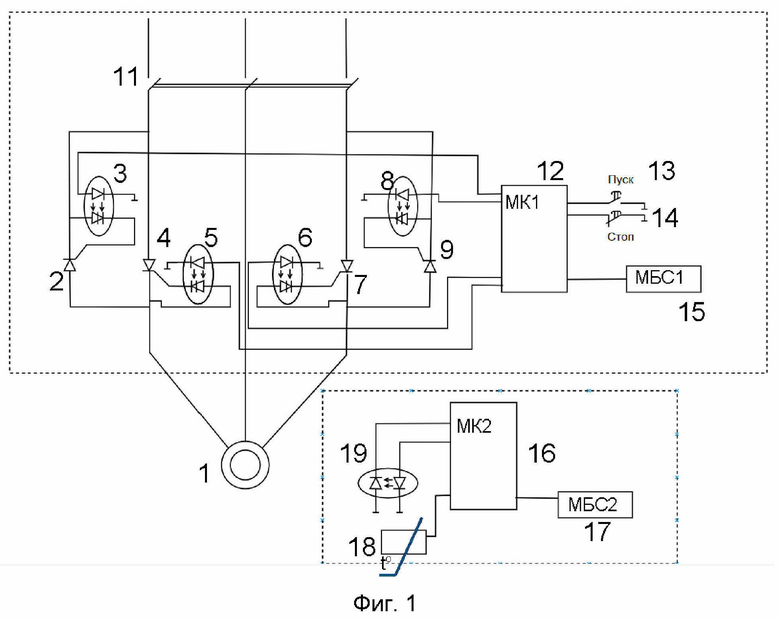
Регулятор частоты вращения асинхронного двигателя, состоящего из статора и ротора, содержащий переключатель, способный коммутировать не менее трех фаз, кнопки Пуск и Стоп, первый и второй встречно-параллельно включенные тиристоры, которые введены в одну фазу, третий и четвертый встречно-параллельно включенные тиристоры, которые введены в другую фазу, отличающийся тем, что кнопки Пуск и Стоп соединены с соответствующими контактами первого микроконтроллера, с еще одним контактом которого соединен первый модуль беспроводной связи, анод светодиода первого оптрона соединен с соответствующим контактом первого микроконтроллера, первый электрод фотоприемника первого оптрона соединен с катодом первого тиристора, второй электрод фотоприемника первого оптрона соединен с управляющим электродом первого тиристора, анод светодиода второго оптрона соединен с соответствующим контактом первого микроконтроллера, первый электрод фотоприемника второго оптрона соединен с катодом второго тиристора, второй электрод фотоприемника второго оптрона соединен с управляющим электродом второго тиристора, анод светодиода третьего оптрона соединен с соответствующим контактом первого микроконтроллера, первый электрод фотоприемника третьего оптрона соединен с катодом третьего тиристора, второй электрод фотоприемника третьего оптрона соединен с управляющим электродом третьего тиристора, анод светодиода четвертого оптрона соединен с соответствующим контактом первого микроконтроллера, первый электрод фотоприемника четвертого оптрона соединен с катодом четвертого тиристора, второй электрод фотоприемника четвертого оптрона соединен с управляющим электродом четвертого тиристора, второй микроконтроллер, предназначенный для расположения на асинхронном двигателе, одним из контактов соединен со вторым модулем беспроводной связи, другим контактом соединен с терморезистором, также предназначенным для расположения на асинхронном двигателе, а третий и четвертый контакты второго микроконтроллера соединены с электродами фотоприемника оптрона с открытым оптическим каналом.
| RU 2055443 C1, 27.02.1996 | |||
| Устройство для дистанционного включения преобразователя частоты | 1983 |
|
SU1140674A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1985 |
|
SU1283925A1 |
| Устройство регулирования и стабилизации частоты вращения асинхронных электродвигателей вентиляторов электроподвижного состава переменного тока | 1985 |
|
SU1421558A1 |
| CN 210669925 U, 02.06.2020 | |||
| CN 203747705 U, 30.07.2014. | |||

